Table des matières
Remerciements iii
Dédicaces iv
Résumé v
Abstract vi
Liste de figures vii
Liste d'abréviations viii
Introduction ix
|
1 Historique et Notions de base
|
1
|
|
1.1
|
Historique
|
1
|
|
1.2
|
Notions de base
|
4
|
|
1.2.1
|
Les moments conditionnels
|
4
|
|
1.2.2
|
La kurtosis et la skweness
|
6
|
|
1.2.3
|
La volatilité
|
7
|
|
1.3
|
Modèle linéaire et non linéaire
|
8
|
|
1.3.1
|
Notions de stationnarité
|
8
|
|
1.3.2
|
Le processus bruit blanc (white noise process) . . . .
|
10
|
|
1.3.3
|
Le processus d'innovation
|
10
|
|
1.3.4
|
Modèle linéaire
|
11
|
|
1.3.5
|
Opérateur de retard L
|
11
|
|
1.3.6
|
Modèle ARMA
|
11
|
|
1.4
|
Méthodologie de Box-Jenkins
|
13
|
|
1.4.1
|
Test sur les résidus
|
13
|
|
1.4.2
|
Modèle non linéaire
|
16
|
|
2
|
|
TABLE DES MATIEEES
|
|
Modèles ARCH et GARCH
2.1 Modèle ARCH
2.1.1 Définition et représentation
2.1.2 Propriétés des processus ARCH
2.2 Les modèles ARCH généralisées
|
23 23 23 28
37
|
|
|
2.2.1 Modèle GARCH(p, q)
|
38
|
|
|
2.2.2 Modèle GARCH (1, 1)
|
42
|
|
3
|
Estimation, prévision et tests
|
45
|
|
3.1
|
Estimation
|
45
|
|
3.2
|
La méthode de MV
|
46
|
|
|
3.2.1 Estimation des paramètres du modèle ARCH .
. . .
|
46
|
|
|
3.2.2 Estimation des paramètres du modèle GARCH .
. .
|
46
|
|
3.3
|
La méthode de PMV
|
47
|
|
|
3.3.1 Exemples
|
50
|
|
|
3.3.2 Estimation du MV sous d'autres lois
|
51
|
|
3.4
|
Prévision
|
54
|
|
|
3.4.1 Modèle avec erreur ARCH
|
55
|
|
|
3.4.2 Modèle avec erreur GARCH
|
57
|
|
|
3.4.3 Erreur de prévision
|
58
|
|
3.5
|
Identification et tests
|
59
|
|
|
3.5.1 Tests d'effets ARCH/ GARCH
|
60
|
|
|
3.5.2 La sélection d'un modèle
|
62
|
|
4
|
Extension du modèles (G) ARCH
|
64
|
|
4.1
|
Modèles asymétriques
|
64
|
|
|
4.1.1 Modèle EGARCH
|
65
|
|
|
4.1.2 Modèles TGARCH
|
66
|
|
4.2
|
Le modèle (G)ARCH en finance
|
66
|
|
|
4.2.1 Les principales propriétés des
séries financières . . . .
|
66
|
|
|
4.2.2 La VaR
|
68
|
|
5
|
Application sur des données réelles
|
70
|
|
6
|
Conclusion
|
76
|

Remerciements
Je rends grace a Dieu qui m'a donné la volonté, la
patience et le courage pour accomplir ce modeste travail.
Je remercie tout particuliêrement Madame Merzoughi
Mouna, Docteur au département de mathématiques a
l'université Badji-Mokhtar Annaba. Pour avoir encadré tout au
long de notre travail et nous avoir appris qu'il y a soit et le monde et qu'il
faut apprendre a s'imposer et imposer ses idées. Ce travail ne se serait
pas fait sans ces bases.
Nous remercions toutes celles et ceux qui, de prés ou
de loin par leurs ouvrages, Leurs expériences, leurs avis, leurs
opinions et leurs écrits ont contribué a la Réalisation de
ce travail.
Mes respectueux remerciements au membre de jury pour avoir
honoré par leur présence afin d'examiner et jury ce travail.
Dédicaces
A mes très chers parents qui ont toujours
été là pour moi, et qui m'ont donné un magnifique
modèle de labeur et de persévérance. J'espère
qu'ils trouveront dans ce travail toute ma reconnaissance et tout mon amour.
A mes chers frères : Mohamed et Bilal.
A mes tantes et à mes oncles,pour leur soutien morale et
leurs sacrifices le long de ma formation.
Et leurs petits enfants : Dhikra wissal, Yakine, Mohamed Rahim,
Ahmed Fakhre Islam et nouveau venu Mehdi.
A chaque cousins et cousines.
A mes meilleurs amis.
Je dédie ce mémoire.
SAMIRA
Résumé
Les modèles linéaires a coefficients constants
classiques, fondés sur l'hypothèse que la variance des erreurs
est constante, ne peuvent pas gérer la volatilité
instantanée qui caractérise, en particulier, les séries
financières (taux de change, taux d'infiation, indices boursiers,...).
La classe des modèles ARCH , introduite par Engle (1982) s'est alors
imposée comme alternative attrayante et fructueuse. En effet, ces
modèles ont vite connu un développement conséquent avec
l'apparition des modèles GARCH (Bollerslev, 1986) et leur forme
similaire a celle des modèles ARMA classiques. Ainsi, la famille ARCH
est capable et adéquate pour capturer plusieurs caractéristiques
non linéaires, comme en particulier la volatilité clustering,
l'excès de kurtosis et l'asymétrie.
Mots dlés modèles ARCH, GARCH et séries
financières.
Abstract
The linear models with constant coefficients classic, founded
on the assumption that the variance of the errors is constant, cannot manage
the instantaneous volatility which characterizes, in particular, the financial
series (rate of exchange, rate of inflation, indexes of security prices...).
The class of models ARCH, introduced by Engle (1982) then imposed itself like
attractive and profitable alternative. Indeed, these models have therefore been
developing rapidly with the appearance of models GARCH (Bollerslev, 1986) and
their form similar to that of the models ARMA classic. Thus, the ARCH family is
able and adequate to capture many nonlinear characteristics, especially as
volatility clustering, excess kurtosis and asymmetry.
Keywords : ARCH, GARCH models and financial series.
Liste de figures
Figure 1.1 : Simulation d'un processus BL(0,0,2,1). Figure 1.2 :
Simulation de processus TAR.
Figure 1.3 : Comparaison entre le processus AR et SETAR. Figure
2.1 : Simulation d'un processus AR(1).
Figure 2.2 : Simulation d'un processus ARCH(1).
Figure 2.3 : L'évolutions de processus E2 t .
Figure 2.4 : Comparaison entre les processus AR(1) et ARCH(1).
Figure 2.5 : Simulation de processus ARCH pour différente
retards. Figure 2.6 : Simulation d'un processus Y et son corrélogramme.
Figure 2.7 : Le test de Jarque-Bera.
Figure 2.8 : Le test ARCH.
Figure 3.1 : Comparaison entre les distributions de student et
normale. Figure 4.1 : Exemple de VaR sous distribution normale.
Figue 5.1 : La série des redements.
Figure 5.2 : Le correlogramme simple et partiel.
Figure 5.3 : Le test de normalité.
Figure 5.4 : Le corrélogramme simple et partiel des
résidus.
Figure 5.5 : Le corrélogramme simple et partiel des
résidus au carrés. Figure 5.6 : Le test ARCH.
Figure 5.7 : Estimations des paramètres.
Figure 5.8 : Le graphe des valeurs actuelle, prédites dans
l'échantillon et du résidus.
Liste d'abréviations
- AR : AutoregRessive.
- ARCH: AutorégRessive Conditional Heteroscedacty.
- ARMA : AutoregRessive Moving Average.
- BL : BiLinéaire.
- CAC40 : Compagnie des Agents de Change.
- EGARCH : Exponential Generalized AutorégRessive
Conditional Heteroscedacty.
- GARCH : Generalized Autorégressive Conditional
Heteroscedacty. - GED : Generalized Error Distribution.
- LM : Multiplicateur de Lagrange.
- MA : Moving Average.
- MV : Maximum de Vraisemblance.
- NASDAQ : National Association of Securities Dealers Automated
Quotations.
- PMV : Pseudo-Maximum de Vraisemblance.
- QMV : Quasi-Maximum de Vraisemblance.
- RESET: Regression Error Specification Test.
- SETAR : Self Exciting Threshold Autoregressive.
- TAR: Thershold AutorégRessive.
- TGARCH : Thershold Generalized AutorégRessive
Conditional Heteroscedacty.
Introduction
Depuis les travaux de Wold (1938), l'intérêt pour
le développement de modèles de séries chronologiques,
pouvant répondre aux besoins de l'utilisateur, a augmenté. Les
modèles de séries chronologique linéaires a coefficients
constants ont connu une ère de prospérité grace, en
particulier, aux travaux de Box et Jenkins (1970) et leur fameux ouvrage qui
les a popularisés avec, en particulier, leur methodologie :
identification, estimation, validation. Ces modèles, qui supposent une
variance des erreurs constante, ont vite montré leurs limites, en
particulier, dans la modélisation des séries chronologiques
macroéconomiques et financières on la focalisation sur les
premiers moments conditionnels-les moments d'ordre supérieurs
étant traités comme des paramètres de nuisance-
supposés constants par rapport au temps, s'est
révélée limitative. De plus, l'importance croissante
motivée par les considérations sur le risque et sur l'incertitude
dans la théorie économique moderne ont nécessité le
développement de nouvelles techniques pour les séries
chronologiques économétriques permettant a la variance et a la
covariance de dépendre du temps. Ainsi est née, sous l'impulsion
du génie d'Engle (1982), la classe des modèles ARCH
(autorégressifs conditionnellement
hétéroscédastiques) suggérés afin de saisir
les caractéristiques particulières des séries de
données d'observations financières. Les modèles ARCH font
la distinction entre les moments du second ordre conditionnels et
inconditionnels (marginaux). Alors que les covariances marginales des variables
d'intérêt peuvent être invariantes par rapport au temps, les
variances et les covariances conditionnelles dépendent souvent et de
façon non triviale, des états du passé du processus.
Comprendre la nature exacte de cette dépendance temporelle est
crucialement important car la perte en effi cacité, si
l'hétéroscédasticité sous jacente est
négligée, peut se révélée importante, en
particulier dans l'évaluation de prévisions.
Les formulations de type ARMA sont quasiment centrées
sur la structure d'autocovariance des processus. Or de nombreuses
séries, financières, en particulier, celles des rendements ne
diffèrent pratiquement pas des
CHAPITRE 0. INTRODUCTION
bruits blancs. En revanche, les séries de carrés
ou des valeurs absolues sont souvent fortement autocorrélées. Ces
deux propriétés ne sont pas incompatibles mais montre que le
bruit blanc n'est pas indépendant. De plus les grandes valeurs (en
valeur absolue) des données d'observation tendent a être suivies
des grandes valeurs, et les petites valeurs, de petites. On dit que le
marché est fortement volatil ou faiblement volatil.
Malgré ce phénomène, le processus
peut-être stationnaire et donc, en particulier, homoscedastique (de
variance marginale constante). Seulement, puisqu'une forte valeur de la
donnée d'observation, au temps (t - 1) tend a augmenter la
probabilité d'observer une forte valeur (en valeur absolue) au temps t,
la variance de la variable au temps t conditionnellement a ses valeurs
passées (appelée volatilité) ne semble pas constante.
L'hétéroscédasticité conditionnelle
n'est incompatible ni avec l'homoscédasticité marginale, ni avec
la stationnarité.
Il est important de noter que lorsqu'on considère les
distributions de fréquence de séries de rendements, de variations
de prix ou du logarithme de ces variations de prix, on remarque qu'elles ne
correspondent pas a une distribution gaussienne. Elles sont a queues
épaisses, a décroissance plus
{~x2 }
lente que exp et présentent un pic en zéro : elle
sont dites leptokur-
2
tiques, leur cceffi cient de kurtosis est nettement
supérieur a 3. Les modèles hétéroscedastiques se
sont révélés particulièrement adaptés a la
prise en compte de ces caractéristiques.
Le document est organisé de la façon suivante :
Le premier chapitre est consacré a une
représentation générale de quelques notions de bases et un
bref historique sur les modèles ARCH , constituant comme un chapitre de
base.
Le second chapitre est distiné a décrire les
diverses modélisations que l'on peut classer sous la rubrique des
modèles hétéroscédastiques univariés et
certaines de leurs propriétés. Le chapitre suivant constitue a
des problèmes d'estimation, de prévision et de tests.
Dans le quatrième chapitre, on va donner quelques
extensions non linéaires des modèles (G) ARCH et ainsi
présenter l'importance de ces modèles sur la finance ou le
marché financier
Enfin le dernier chapitre porte une application sur un indice
boursier pour bien voir l'effet ARCH.
Chapitre 1
Historique et Notions de base
1.1 Historique
La théorie financière recourt de façon
significative aux outils statistiques depuis plus de trente ans. On peut ainsi
mentionner le travail tout a fait remarquable réalisé par Louis
Bachelier (1870-1949), qui, dans sa thèse de doctorat es sciences
mathématiques, défendue en mars 1900 et intitulée <<
Théorie de la spéculation>>, introduisit le concept de
marché efficient bien longtemps avant que cette notion soit
développée avec l'intérêt que l'on connalt. Il
utilisa a cet effet des modèles de marche aléatoire, des
mouvements browniens et de martingales. Il se posa même la question de
tester sa théorie empiriquement. Mais son uvre resta discrète
jusqu'en 1960, date de la traduction anglaise de son travail.
Jusque dans les années 1950, les ouvrages
consacrés a la finance furent très souvent descriptifs. Le but
essentiel consistait a décrire et informer sur les instruments
financiers, les institutions financières et, de façon
générale, les pratiques financières des entreprises. Parmi
les travaux qui bouleversèrent cette situation, il faut notamment
mentionner ceux de Markowitz [1952, 1959] et Tobin [1958] sur les
sélections des portefeuilles d'une part, ceux de Modigliani et Miller
[1958] sur la structure du capital et l'évolution des firmes, d'autre
part.
En ce qui concerne l'usage des méthodes statistiques en
finance, plusieurs voies ont été suivies.
1. L'utilisation des modêles de régression et des
modêles économétriques se trouve dans pratiquement tous les
secteurs de l'analyse financière. La référence la plus
marquant en la matière faisant l'état de la question pour les
années 1960 a 1975 est certainement l'ouvrage écrit par
Fama en 1976 et intitulé Foundations of finance. Cette
publication ne doit cependant pas nous faire oublier, comme indiqué
ci-dessus, les travaux basés sur les publications de Markowitz [1959]
dans la sélection des portefeuilles, qui ont débouché sur
des modèles de marché relativement complexes et qui ont
constitué un domaine de réfiexion théorique
intéressant pour la recherche statistique.
2. L'analyse multivariée (analyse en composantes
principales, analyse discriminante,...) a aussi constitué un outil de
plus en plus utilisé dans de nombreuses études exploratoires.
Citons en particulier les articles de Pinches et Mingo [1973] et ceux de Herbst
[1974] qui recourent a la fois a une analyse factorielle et une
modélisation par régression, sans oublier les travaux de bloyd et
Lee [1976] sur des modèles d'équilibre des actifs financiers.
L'analyse discriminante a aussi trouvé dans l'usage des modèles
logis une alternative utilisée par les praticiens.
3. L'usage des modêles de séries chronologiques,
et tout particulièrement ceux associés a la classe des processus
ARMA, constitue un aspect important de l'application de la statistique en
finance. Dés le milieu des années 1970, plusieurs auteurs ont
recouru a la méthodologie de Box et Jenkins pour estimer ou
prévoir gains et taux. Nous évoquerons l'usage de cette
démarche ci-dessous. Il est cependant utile de mentionner aussi dans
cette catégorie, les tentatives liées a l'usage de l'analyse
spectrale, notamment appliquée a l'étude des taux
d'intérêt ou pour tester l'effi cacité d'un marché
(par exemple, Granger et Morgenstern [1970] et Percival [1975]).
4. La théorie de la décision constitue un
quatrième outil, permettant a divers auteurs de recourir a une approche
bayésienne dans leur démarche : citons en particulier les travaux
de Winkler et Barry [1975] dans le choix d'un portefeuille et ceux de Vasicek
dans l'estimateur des betas des actions [1973].
Le développement des modèles ARCH se place dans
le contexte et la lignée des modèles des séries
chronologiques évoqués ci-dessus. Ces modèles ont
été essentiellement développés avec des objectifs
des descriptions, de dessaisonalisation, de prévision ou de
contrôle de systèmes. L'age d'or de cette modélisation se
situe dans les années 1970 avec le développement des
modèles autorégressifs-moyennes mobiles (ARMA) et de leurs
généralisations, qui présentaient l'avantage de se
prêter facilement a l'emploi. Comme nous l'avant déjà
souligné plus haut, leur usage s'est trouvé facilité par
recours a une méthodologie, due a G.E.P. Box et G.M. Jenkins,
destinée a
1.1. HISTOPIQUE
aider l'utilisateur dans le choix d'un modèle,
l'estimation de ses paramètres et sa validation, méthodologie qui
depuis une vingtaine d'années a engendré des travaux aussi
multiple qu'intéressants.
Parmi les domaines d'application on la modélisation
ARMA se révèle insuffi sante, figurent certains problèmes
financiers et monétaires. Les séries disponibles dans ce secteur
présentent en effet souvent des caractéristiques de dynamique non
linéaire, dont la plus significative est le fait que la
variabilité instantanée de la série (appelé
volatilité) dépend de façon importante du passé. Il
existe d'autre part des théories financières basées sur
des principes d'équilibre et de comportements rationnels des agents
intervenant sur le marché qui conduisent naturellement a introduire et a
tester des contraintes structurelles sur les paramètres.
Historiquement, les modèles ARCH (Autorégressifs
Conditionnellement Hétéroscédastiques) ont
été introduits par R.F. Engle en 1982. Dans son article, l'auteur
ne suppose plus que (€t; t Z) est un bruit blanc mais envisage
plutôt que ce processus est de la forme :
"t = ~ ht
on
71t c" i.i.d.Af (0, 1)
h = c + X p çbi "2 ti
i=1
Dans cette expression, on suppose que c > 0 et que
çbi ~ 0 (i = 1, ..., p). Cette façon de
procéder permettait a Engle de tenir compte du fait que les variations
de prix --fortes ou faibles--étaient suivies d'autres variations fortes
ou faibles des signes imprévisibles. Certaines conditions étaient
en outre imposées afin de réduire le nombre de paramètres
du modèles.
En ce qui concerne les domaines d'application, on peut en
distinguer deux grandes catégories. Les premiers consistent a tester des
théories économiques relatives aux divers marchés
(devises, obligations,...). Les seconds traitent des comportements
d'interventions sur le marché des établissements financiers
(détermination des portefeuilles optimaux, de portefeuilles de
couverture,...). Ce dernier type d'application est plus
<<sensible>> et, par la-même, généralement
couvert par le <<secret bancaire>> .
1.2 Notions de base
1.2.1 Les moments conditionnels
La définition d'un processus ARCH fait intervenir la
notion de variance conditionnelle. Nous avons vu que la variance conditionnelle
permet de modéliser la variance locale du processus a chaque instant t,
en fonction des observations antérieures.
Cette notion peut être étendue a tous les moments
de la série chronologique. Ainsi, l'espérance conditionnelle du
processus {Xt} au temps t est la valeur moyenne attendue du processus au temps
t calculée en tenant compte des valeurs du processus observées
dans le passé. Pour illustrer ce concept, considérons la marche
aléatoire
xt = xt_1 + €t, €t i.i.d r' ,A/ (0, 2)
Calculons son espérance conditionnelle en Xt, tenant
compte des observations passées {Xt_i, i > 0} : par
linéarité de l'espérance, on peut écrire :
E (Xt/It~1) = E (Xt~1/It~1) + E ("t/It-i)
Le premier des deux termes de la somme est la valeur attendue
de Xt sachant {Xt_i, i > 0}. Comme on connait Xt_i, ce
terme est l'espérance d'une valeur fixée Xt_1 et donc
:
E (Xt/It~1) = Xt~1 + E ("t/It-i)
En ce qui concerne le deuxième terme, il faut observer
que "t ne dépend pas des réalisations passées du processus
{Xt_i, i > 0} (car le processus {€t} est IID). La
connaissance du passé ne modifie donc pas la valeur attendue de "t et on
peut écrire :
E (Xt/It~1) = Xt~1 + E (€t) = Xt~1:
L'espérance conditionnelle d'une marche
aléatoire en t est donc la valeur du processus en t - 1. On peut
interpréter ce résultat en énonçant que le meilleur
prédicteur linéaire de la valeur moyenne d'une marche
aléatoire est réalisé en répétant sa
dernière valeur observée.
Rappelons a présent la définition
générale de l'espérance conditionnelle en termes de
variables aléatoires. Pour tout couple de variables aléatoires
(X, Y ) continues de densite f (., .), la densite conditionnelle
de X sachant que Y = y est definie par
fX[17 (x/y) = f (x, y)
fy (y)
pour autant que fy (y) > 0. Il est donc naturel de definir
l'esperance conditionnelle de X par :
E (X/Y = y) = f_#177;:dx xfxly (x/y)
pour les valeurs de y telles que fy (y) > 0. Dans le
contexte des series chronologiques, la variable aleatoire X est la valeur Xt du
processus au temps t, alors que la variable Y represente l'ensemble des valeurs
{Xt_i, i > 0} = {Xt_i, i > 1} prises par le processus avant le temps t.
Dans la suite de cette section, nous noterons cet ensemble It_1 :
It1 = {Xt_i,i > 0}.
It1 represente donc l'ensemble de l'information disponible
jusqu'au temps t--1 inclu. Lorsque t augmente, It1 contient
davantage de variables aleatoires, c'est pourquoi on peut ecrire :
It1 C I C It+1 C It+2 C . . .
Nous avions observe dans l'exemple ci-dessus de la marche
aleatoire que l'esperance de Xt_1 calculee conditionnellement à It1 =
{Xt_i, i > 0} revient a prendre l'esperance d'une valeur connue Xt_1 et est
donc egale à cette valeur Xt_1. On peut ecrire formellement ce resultat
comme suit :
E (Xt_i/It-1) = Xt_i.
On peut bien entendu generaliser cette propriete a l'esperance
de Xt conditionnellement a tout ensemble I, contenant Xt, et nous obtenons la
première propriete de l'esperance conditionnelle :
E (Xt/I8) = Xt, sits
Une deuxieme propriete importante de l'esperance conditionnelle
est la loi des esperances iterees :
E (Xt/I7.) = E (E (Xt/I8)/Ir)
, si r et s sont tels que Ir C Is
(alors si r s), et, en particulier :
E (Xi) = E (E (Xt/I5)).
Ce résultat fondamental est très utilisé
car il permet souvent de calculer assez facilement une espérance
après avoir conditionné le processus par un ensemble
15.
La notion de variance conditionnelle est naturellement
définie a partir de celle de l'espérance conditionnelle, par la
définition de la variance en fonction de l'espérance.
2 t = V (Xt/It~1)
= E (X2 t /it1) -- E (Xt/It~1)2 . 1.2.2 La kurtosis et la
skweness
Soit jUk le moment empirique d'ordre k du processus Xt
|
La kurtosis
|
k = E [Xt -- E [Xt]]k = 1 XT
T
t=1
|
(Xt - ~X~k
|
Definition 1.2.1 On définit une nouvelle mesure : le
degré d'excês de Kurtosis.
3.
Degr,e d0exc~es de Kurtosis =
4
2
2
Definition 1.2.2 La Kurtosis ou le coefficient d'aplatissement
pour un échantillon de taille T s'écrit :
|
KU = 4
2
2
|
~!
Ti--oo
|
\/ )
24
A/ 3, .
T
|
Sous l'hypothêse nulle de normalité, on montre que
:
~!
,A/ (0,1).
Ti--oo
K -- 3
T
q24
La Kurtosis mesure le caractère pointu ou plat de la
distribution de la série. La Kurtosis de la distribution normale est 3.
Si la Kurtosis est superieur a 3 (queues épaisses), la distribution est
plutôt pointu (distribution leptokurtique); si la Kurtosis est
inférieur a 3, la distribution est plutôt plat (distribution est
dite platikurtique).
La skweness
Définition 1.2.3 La skweness ou le coefficient
d'asymétrie pour un échantillon de taille T s'écrit :
(Sk)1 2 = 3
3
~
r )
6
N 0, .
T
~!
Ti--oo
2
2
Sous l'hypothêse nulle de distribution normale et donc par
conséquent de symétrie, on montre que :
|
(Sk)1 2
|
~!
Ti--oo
|
,A/ (0,1).
|
|
q 6
T
|
La Skewness est une mesure de l'asymétrie de la
distribution de la série autour de sa moyenne. La Skewness d'une
distribution symétrie, telle que la distribution normale est nulle. La
Skewness positive signifie que la distribution a une queue allongée vers
la droite et la Skewness négative signifie que la distribution a une
queue allongée vers la gauche.
1.2.3 La volatilité
La volatilité est une mesure de l'instabilité du
cours d'un actif financier. Elle mesure l'amplitude des variations d'une
action, d'un produit dérivé ou d'un marché. Il s'agit d'un
paramètre de quantification du risque de rendement et de prix. Les
séries monétaires et financières sont
caractérisées par le clustering de volatilité, a savoir
les périodes de forte volatilité alternent avec les
périodes de faible volatilité. Ce phénomène, que
nous appelons aussi l'hétéroscédasticité
conditionnelle, est particulièrement fréquent dans les
données boursières, les taux de changes ou d'autres prix
déterminés sur les marchés financiers. Nous allons
présenter quelques méthodes pour me-surer la volatilité.
Elles sont groupées selon leurs caractéristiques : mesurer la
volatilité en utilisant les formules statistiques ou en utilisant les
modèles.
Les mesures statistiques
Sur le marché financier, la volatilité est
mesurée comme l'écart type de la rentabilité. L'estimation
de l'écart type des rentabilités journalières servent
comme une méthode utile pour caractériser l'évolution de
la volatilité. Cette
statistique mesure la dispersion de la rentabilité :
~ = T - 1
qPT ~Rt ~ R2 t=1
on R~ est la rentabilité moyenne de
l'échantillon. L'écart type est une mesure simple mais utile de
la volatilité. Quand l'écart type est grand, la chance d'avoir
une rentabilité élevée positive ou négative est
grande. Plusieurs études ont utilisé la modification de
l'écart type pour mesurer la volatilité.
Les modèles
Les formules statistiques ne sont effi caces a mesurer la
volatilité que dans les cas on la valeur de l'écart type en t ne
dépend pas de celle dans le passé. Pour ces cas, les mesures en
utilisant des modèles sont plus effi caces. D'après Engle, la
volatilité sur le marché financier est prévisible. Cette
afli rmation n'est justifiée que dans les cas l'effet ARCH existe. Dans
les modèles, les statistiques des séries temporelles sont prises
pour trouver la meilleure valeur anticipée de la volatilité. Et
en utilisant les statistiques des séries temporelles, il est possible de
déterminer si l'information récente est plus importante que celle
dans le passé.
1.3 Modèle linéaire et non
linéaire
1.3.1 Notions de stationnarité
Rappelons au passage les définitions de la
stationnarité forte et de la stationnarité faible (ou
stationnarité du second ordre). Soit un processus temporel
aléatoire (Xi, t 2 Z).
Définition 1.3.1 Le processus X est dit strictement ou
fortement stationnaire si quelque soit le n-uplet du temps t1 < t2 < ..
< tn, tel que t 2 Z et pour tout temps h 2 Z avec t + h 2 Z,Vi,i
= 1,..,m, la suite (Xt1+h, .., Xtn+h) a la même loi de
probabilité que la suite (Xt1, .., Xtn).
Dans la pratique, on se limite généralement a
requérir la stationnarité du second ordre (ou
stationnarité faible) du processus étudié.
Definition 1.3.2 Un processus (Xt, t E Z) est dit stationnaire
au second ordre, ou stationnaire au sens faible, ou stationnaire d'ordre deux
si les trois conditions suivantes sont satisfaites :
(i) E (X?) < oo, Vt E Z.
(ii) E (Xi) = m,indépendant de t, Vt E Z.
(iii) coy (Xt, Xt+h) = E [(Xt+h -- m)(Xt -- m)] = 7(h),
indépendant de t, V(t,h) E Z2.
La première condition garantit tout simplement
l'existence (ou la convergence) des moments d'ordre deux. La seconde condition
porte sur les moments d'ordre un et signifie tout simplement que les variables
aléatoires Xt doivent avoir la meme espérance quelle que soit la
date t. Enfin, la troisieme condition, porte sur les moments d'ordre deux
résumés par la fonction d'autocovariance.
Cette condition implique que ces moments doivent etre
indépendants de la date considérée et ne doivent
dépendre uniquement que de l'ordre des retards. En résumé,
un processus est stationnaire au second ordre si l'ensemble de ses moments sont
indépendants du temps. Par conséquent, il convient de noter que
la stationnarité implique que la variance ry (0) du processus Xt est
constante au cours du temps.
Theoreme 1.3.1 (Théoreme de Wold) Tout processus
stationnaire d'ordre deux (Xi, t E Z) peut 'etre représenté sous
la forme :
ofi les parametres i satisfont 0 = 1, i
E R, Vi E N*, Er() 2i < oo et ofi Et N IID (0, cr2).
On dit que la somme des chocs passés correspond a la composante
linéaire stochastique de Xt .Le terme kt désigne la composante
linéaire.
·
Theoreme 1.3.2 (Théoreme de Volterra) Tout processus
stationnaire au sens fort (Xi, t E Z) peut 'etre représenté sous
la forme :
|
Xt =
|
1
X
i=0
|
Et-i +
|
1
X
i=0
|
1
X
i=0
|
ijEt-iEt-j +
|
1
X
i=0
|
1
X
i=0
|
1
X
k=0
|
ijkEt-iEt-jEt-k +
·
·
· .
|
ofi Et est bruit blanc gaussien.
1.3.2 Le processus bruit blanc (white noise process)
Definition 1.3.3 Soit (Et)tEZ un processus stochastique, on dit
que lg
\--t,tEZ
est un processus stochastique hasard pure ou bruit blanc
faible(resp fort) si les trois proprietes sont verifier :
i) E (Et) = 0,Vt E Z.
ii) V ar (Et) = U2, Vt E Z.
iii) Coy (Et, Es) = E(EtEs) = 0, Vt
L s.
La propriété iii implique que les Et sont non
corrélées entre eux (resp les Et sont i. i. d)
Notation :
- Si {Et} est un bruit blanc faible, on notera par : {Et}
rs, W N (0, o-2).
- Si {Et} est un bruit blanc fort, on notera par : {Et}
rs, IID (0, cr2).
Ce processus est un processus stationnaire d'ordre deux telle
que : toutes les variables sont de même moyenne nulle et de variance
cr2 (constante finie) et non corrélées entre eux.
1.3.3 Le processus d'innovation
Nous introduisons un concept d'innovation adapte a l'analyse
des dynamiques non linéaires. L'innovation d'un processus stochastique
Xt sont habituellement définies comme
1. Les erreurs représentent comme différence entre
la valeur prévu et réalisé
Et = Xt - E (Xt/It-1)
est une innovation au sens forte. On peut dire que Et est un
bruit blanc si E (Et) = a2 et "orthogonal" a toute fonction du
passé de It1
E (Et/It-1) = 0;
2. Le carré des erreurs représentent comme
différence entre la valeur réalisée et la variance
conditionnelle
E2t = Xt - V (XvIt-1) ;
3. Le carré des erreurs normalisées
définie
2 (Xt - E (Xt/It_1))
,VV (Xt/It-1) .
Et =
1.3.4 Modèle linéaire
Définition 1.3.4 Un processus (Xt)tEZest un
processus linéaire (resp linéaire général)de
moyenne s'il s'écrit sous la forme:
xt = , + X1 k"t--k
k=oo
oh {"t}tEZ est un bruit blanc fort (resp faible) avec
variance cr2 et oh la suite des coefficients k est
supposé telle que : P1 k=QQ 2 k < oc.
1.3.5 Opérateur de retard L
L'opérateur L décale le processus d'une
unité de temps vers le passé
LX = Xt~i
Propriétés
1. Si on applique h foie cet opérateur, on décale
le processus de h unité de temps :
L(L(...LXt...)) = L'Xt = Xt_h.
2. Si Xt = c,Vt E Z avec c E R,LiXt = Lic
= c,Vi E Z.
3. Si a < 1
(1 - ~L)1Xt= xt
(1 - aL)= uim
j--+oo (1 + ~L + ~2L2+::: +
~jLj)X t:
Cette derniêre propriété est
particuliêrement utile pour inverser des polynômes d'ordre 1
définis en l'opérateur de retard.
1.3.6 Modèle ARMA
Les modèles ARMA s'appuient principalement sur deux
principes mis en évidence par Yule et Slutsky, le principe
autorégressif et moyenne mobile.
Puis en 1970, leur application a l'analyse et a la
prédiction des séries temporelle fut
généralisés Box et Jenkins en combinant les deux principes
ARMA ils montrèrent que ce processus pouvait s'appliquer a de nombreux
domaines et était facile a implémenter.
Modèle AR
Un processus autorégressif est un processus dont chaque
valeur est décrite comme une combinaison linéaire des valeurs
précédentes plus une composante aléatoire qu'on appelle un
<<choc>> . Le nombre de valeurs précédentes
considérées est appelé <<ordre>> du
processus.
Definition 1.3.5 Le processus {Xt, t N (ou Z)}satisfait
l'équation générale d'un processus AR d'ordre P :
Xt = 8 + X p cbjXt--j + "t (1.1)
j=1
Definition 1.3.6 ot
8 : le coefficient d'accroissement; çbj : les coefficients
d'autorégressifs;
"t : un choc bruit blanc indépendant.
Modèle MA
Chaque valeur est décrite par une composante d'erreur
aléatoire et une combinaison linéaire des erreurs
aléatoires associées aux valeurs précédentes. De
même, l'ordre du processus est défini par le nombre d'erreurs
précédentes prises, en considération.
Definition 1.3.7 Le processus {Xt, t N (ou Z)}satisfait
l'équation générale d'un processus MA d'ordre q :
Xt = ~ - X q j"t--j + "t (1.2)
j=1
Definition 1.3.8 ot
j : les coefficients de moyenne mobile.
"t--j : les chocs ou le processus purement aléatoire.
Modèle mixte
Le modèle linéaire le plus courant est le
modèle ARMA qui combine simplement les deux principes AR et MA.
Définition 1.3.9 Le processus {Xt, t N (ou Z)} admet
l'équation générale suivante qui définit un
modéle ARMA(p, q)
Xt = , + X p cbj Xt_3 - X q j t_3 (1.3)
j=1 j=1
oli p est l'ordre de processus autorégressif et q l'ordre
de processus moyenne mobile.
1.4 Méthodologie de Box-Jenkins
L'approche de Box-Jenkins (1976) consiste en une
méthodologie rigoureuse d'étude systématique des
série chronologique a partir de leur caractéristique. L'objectif
est de déterminer le modèle le plus adapté a
représenter le phénomène étudié. Il faut
bien noter qu'il est tout a fait possible d'obtenir plusieurs modèles
satisfaisants. Cette méthodologie suggère une procédure a
trois étapes :
- Identification du modèle : dans cet étape, on
va étudier le corrélogramme simple et partiel correspondant, tel
que le corrélogramme simple correspondant l'ordre du processus MA et
simple leprocessus AR.
- Estimation des paramètres du modèle.
- Validation du modèle par tests sur les coffi cients et
sur les résidus.
1.4.1 Test sur les résidus
Il existe un grand nombre de tests d'autocorrélation, les
plus connus sont ceux de Box et Pierce (1970) et Ljung et Box (1978).
Test de Box-Pierce ( Porte-monteau)
Soit une autocorrélation des erreurs d'ordre h( h > 1)
:
t = Pi t_i + P2 t_2 + ~~ ~ + Ph
t_h + Vt avec Vt J'f (0,cr2 )
~
Les hypothèses du test de Box-Pierce sont les suivantes
:
J
H0 : P1 = P2 = ~ ~ ~ ~ ~ ~ = Ph = 0 H1 : il existe au moins un
P =6 0 Pour effectuer ce test, on a recours a la statistique QBP qui
est donnée
par:
QBP = T XH ^P2 h
h=1
on T est le nombre d'observations et ^Ph est le
coefficient d'autocorrélation d'ordre h des résidus
estimés et.
Sous l'hypothèse H0 vraie, QBP suit la loi du
khi-deux avec (H - p - q) degrés de liberté :
|
QBP = T
|
XH
h=1
|
^P2 h ~! x2 (H -- p -- q)
T--oo
|
Pour effectuer ce test il est conseillé de choisir H = T 4
(d'aprés Box-Jenkins).
La règle de decision
Si QBP > k* on k* est la valeur
donnée par la table du khi-deux pour un risque fixé et un nombre
(H - p - q) de degrés de liberté, on rejette H0 implique que les
"t ne forment pas un bruit blanc. Sinon, on accepte H1 (autocorrélation
des erreurs).i.e les €t forment un bruit blanc.
Test de Ljung-Box
Ce test est a appliquer, de préférence au test
de Box-Pierce. La distribution de la statistique du test de Ljung-Box est en
effet plus proche de celle de khi-deux en petit échantillon que ne l'est
celle du test de Box-Pierce. La statistique de test s'écrit :
|
QLB = T (T + 2)
|
XH
h=1
|
^P2 h
|
|
|
T -- H .
|
Sous l'hypothése nulle d'absence d'autocorrélation
:
^P2 1 = ^P2 2 = ~ ~ ~ = ^P2 h = 0.
La statistique QLB suit une loi de khi-deux a (H - p -
q) degrés de liberté.
Tests d'hétéroscédasticité (ARCH)
Le test ARCH consiste a effectuer une régression
autorégressive des résidus carrés sur q retard :
e2 t = 0 + X q j e2 t_3
j=1
on et désigne le résidu a l'instant t issu de
l'estimation des paramètres du processus ARMA (p,q).
Pour déterminer le nombre de retards q, on étudie
le corrélogramme des résidus au carré.
Les hypothèses du test ARCH sont les suivantes :
J
H0 : homoscédasticité et Oo = O1 = ~ ~ ~ =
Oq = 0 H1 : hétéroscédasticité et il y a
au moins un coefficient O =6 0
Pour mener le test, on utilise la statistique de test T x
R2 on T correspond au nombre d'observations de la série et et
R2 représente le coefficient de détermination
associé a la régression.
Sous l'hypothèse H0 la statistique de test T x
R2 suit la loi du khi-deux a q degrés de liberté.
La règle de décision
- Si T x R2 x2(q) on x2(q)
désigne la valeur critique figurant dans la
table du khi-deux, on accepte ici l'hypothèse H0
d'homoscédasticité. - Si T x R2 > x2(q),
on rejette ici l'hypothèse H0 d'homoscédasticité
et on admet qu'il y a de
l'hétéroscédasticité.
Tests de normalité
Pour vérifier si le processus des résidus
{€t, t Z} est un bruit blanc gaussien, plusieurs tests peuvent être
utilisés, mais le test le plus courant est celui de Jarque et Bera. Ce
dernier est fondé sur la notion de skewness et de kurtosis.
Le test de Jarque et Bera regroupe ces deux tests en un seul
test. On construit la statistique :
T
S = 6 Sk + 24 (Ku - 3)2 -!
T T i--oo x2 (2)
Donc si S ~ x2 1_a (2) on rejette l'hypothèse H0 de
normalité des résidus au seuil de a%.
1.4.2 Modèle non linéaire
Par conséquent, l'hypothèse de processus ARMA
stationnaire ne per-met pas de prendre en compte d'une part les
mécanisme d'asymétrie et d'autre part les rupture de forte
amplitude. D'oñ la nécessite d'aller vers des
modélisations non linéaires. L'espérance conditionnelle E
(Xt/Zt_1) est la meilleurs approximation au sens de l'erreur quadratique
moyenne de t par une fonction des valeurs passés. Il existe une
infinité de processus non linéaire susceptible de
représenter les propriétés des séries
financières. Compbell, Lo et Mackinlay [1997] ont proposé le
cadre suivant pour décrire un processus non linéaire :
Xt = g ( t-1, t-2,...) + h ( t-1, t-2,...)
on la fonction g(.) correspondant a la moyenne conditionnelle
du processus X et on la fonction h(.) correspondant a un coefficient de
proportionnalité entre X et le choc t cela permet de
classifier les processus non linéaire en deux parties :
1) Processus non linéaire en moyenne pour lesquelles g(.)
est non linéaire.
2) Processus non linéaire en variance pour lesquelles
h(.)est non linéaire.
Cette classification permet de regrouper la plupart de
modèles non linéaire. Dans ce domaine le papier de Engle [1982]
<< Autoregressive Conditional Heteroskedasticity with Estimates of the
variance of UK inflation -Economica->> a ouvert la voie a la
modélisation ARCH et a ses nombreux développements. C'est
précisément sur cette voie que mon document portera par
l'essentiel. Mais avant cela, on va présenter un modèle non
linéaire portant proche des modèles ARCH.
Modèle BL <<Granger et Anderson [1978]>>
Les modèles bilinéaires présente la
particularité d'être a la fois linéaire en X et mais de ne
pas d'être a ces deux variables prise conjointement. Un modèle BL
d'ordre, noté par le signe BL (p, q, P, Q), s'écrit ainsi sous la
forme :
Xt = , + X p cbiXt_ + X q j t-j + XP X Q ~ijXt~i tj
(1.1)
i=1 j=0 i=1 j=1
|
'y (h) =
|
~ 2 + A2E (X2 ) .2 si h = 0
t_2
0 si h ~
|
1
|
avec 0 = 1, (cp, q, APi, AiQ ) E *4, V
(i, i) et on €t désigne un bruit blanc éventuellement
gaussien, c'est a dire un bruit blanc fort, cette l'hypothése assure
l'existance de la variance. Certain des processus bilinéaires ont des
proprietés proches de celles des modèles ARCH que nous
étudions dans ce document.
Exemple 1.4.1 Comsidéroms um cas particulier de processus
BL (0, 0, 2, 1) de type:
Xt = €t + A Xt_2 €t_ (1.2)
on A E et €t est identiquement indépendante
distribué (0, cr2). Ce
processus est centré, puisque le bruit est
indépendant du passé (donc coy (€t_1,Xt_2) = 0),
E (Xt) = E (€t) + A E (Xt_2 €t-1)
= E (€t) + A E (Xt_2) E (€t-1) = 0.
Sa fonction de d'autocovariance est donné par:
'y (h) = E (Xt Xt_h)
= E [(€t + AXt_2 €t-1) (€t--h + AXt_2_h
€t_1_h)] = E (€t €t--h) + A2E (Xt_2 €t--i Xt_2_h
€t_1_h) +AE (Xt_2 €t-1€t--h) + AE (Xt_2_h €t-1--h
€t)
pour h > 1, il n'apparait aucun terme en €2 t_h et
puisque l'opérateur espérance est linéaire, la fonction 'y
(h) est par conséquant nulle. En revanche, pour h = 0, on a :
'y (0) = E (€2 ) + A2E (X2 )
) E (€2
t t_2 t_1
= a2 + A2E (X2 ) a2
t2
Ainsi la fonction générale d'autocovariance
s'écrit :
La variance marginale de ce processus est V (Xi) = 2
1_A2a2. Tl existe
une solution stationnaire du seconde ordre de
l'équation (1.2) a condition A2cr2 < 1.
Paralelement, la variance conditionnelle du processus X se dérive
directement a partir de l'équation (1.2) :
]
V (Xt/Xt_2) = 2 [1 + A2X2 t_2
La variance conditionnel le du processus X dépend des
valeurs passées de ce processus. On retrouve un effet de type ARCH. Ceci
illustre le fait que plusieurs modélisations non linéaires
peuvent être envisagées si l'on souhaite modéliser la
dynamique dans la volatilité conditionnelle.
Exemple 1.4.2 On vérifie sur le graphique (1.1) que le
modêle BL BL(0, 0, 2, 1) avec A = 0.2 est capable de
générer des cluster de volatilité comme ceux
observés sur données financiêres.
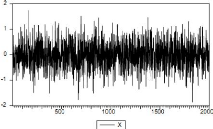
Figure 1.1 : Simulation d'un processus
BL(O,O,2,1).
Modèles TAR
Les modèles autorégressifs a seuil ou TAR ont
été proposés par Tong [1978]. Tlles a introduits comme des
approximations discrètes des modèles non linéaires. Tls
permettent de reproduire des phénomènes tels qu'un cycle
limite.
Supposons que le processus Yt vérifie au temps t une
équation parmi plusieurs équations différente selon la
valeur d'une variable (autre que Yt).

Chaque equation correspond a un regime. Dans le cas d'un seuil
unique et d'une variable Xt,
Exemple 1.4.3 Considérons le cas de modeles AR (1) avec
un seuil unique
{0(1)Xt-i + Et, si Xt_i < a
Xt =
Tong a considers l'existance de plusieurs seuils. La variable
Xt, est une variable exogene, soit une variable (Yt) retardée (Yt_d).
Dans ce dernier cas, on parlera eventuellement de modele SETAR. Il est a noter
que les bruits Et et nt sont independants et peuvent etre de
variance differente.
0(2)Xt-1 + Et, si Xt_1 > a
avec le même bruit. Une condition nécessaire et
suc/cante d'existence d'une solution stationnaire et 0(1) < 1,
0(2) < 1 et 0(1)0(2) < 1.
La série ci-dessous correspond a une simulation de la
série
--0.2 Xt_1 + Et, si Xt_i < 1
Xt =
0.9 Xt_1 + Et, si Xt_i > 1
avec un bruit blanc gaussien, centré réduit,
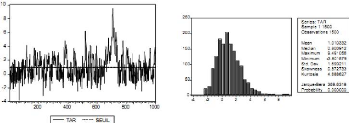
Figure 1.2 : Simulation de processus TAR.
Ce type de processus, la aussi, permet d'avoir des queues de
distribution plus épaisses (en l'occurence ici pour les fortes valeurs
de Yt - queue a droite).
Er 1 01) Xt_z + Et, si Xt < a
{ Xt
Yt =
r 4
2)Xt
_
i +
n
t, si > a
Une écriture équivalente du modèle a seuil a
deux régimes, avec un seul reatard, ou une seule variable exogène
( Xt ou Yt_i), est la suivante
Y=
+
0
(2)Xt
_
i + si Xt >
a,
{
6 .1 #177; 01) Xt_i #177;
Et, Si Xt <
cela équivalent a
Yt = (81 + 0(1)Xt-i 1 lixt<a
+ (82 + 0(2)Xt-i 1 lixt>a + ut,
on (ut) est une séquence de bruits indépendants,
dont la variance est de la forme
V (ut) = cr,21Ext<a +
o-2,71Ext>a.
Les modeles SETAR
Toutefois, dans cette classe de modèles, les travaux
ont dans leur trés grande majorité portè sur la
sous-classe des processus TAR et tout particulièrement celle des SETAR
certainement en raison de moindres dificultés d'estimation. Ainsi, un
SETAR a un seul changement de régime aura pour écriture :
61 + Er 1 0(1) Xt--i €it, si Xt_d < ~
Xt = 2
+ (2)
i Xt~i + E2t, si Xt_d > ~
et plus généralement, un SETAR (K, p1,..., pk, d)
s'écrira :
|
Xt =
|
XK
k=1
|
+
|
Pk
i=i
|
),01°) iXt--i + Ekt x E (Xt-d E
Rt)
|
on
{1 si Xt_d < ~
lit =
0 si Xt_d > a
Exemple 1.4.4 La Figure représente le graphique des
données simulées provenant du modèle AR (1) et du
modèle SETAR. Il s'agit de modèles simulés avec
200 observations et avec les paramètres suivants :
- pour le modèle AR (1) : Xt = 0:5 Xt_i + Et
- pour le modèle SETAR : Xt = -- 0.3Xt_1 (1 -- + Et
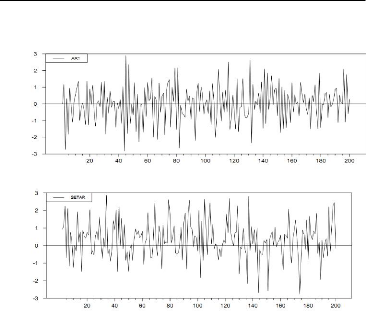
Figure 1.3 : Comparaison entre le processus AR et SETAR.
Exemple 1.4.5 Si on fait une analyse visuelle des deux
graphiques, on constate que le pattern de ces deux modéles est
différent. Une première différence est l'échelle
des valeurs simulées qui est plus grande pour le modéle AR (1).
Une deuxiéme différence vise la moyenne et la variance de la
variable dépendante des modéles. L'analyse descriptive
présentée au Tableau suivant permet de constater que la moyenne
du modéle AR (1) est trés proche de zéro et plus petite
que celle le modéle SETAR, mais sa variance est plus grande que celle du
modéle SETAR. Les valeurs de skewness et d'excés de kurtosis
permettent de rejeter l'hypothése de normalité pour les deux
modéles.
|
AR(1)
|
SETAR
|
|
Moyenne
|
0.0483*
|
0.4069*
|
|
Variance
|
1.8619*
|
1.0854*
|
|
Skewness
|
-0.1607*
|
0.3703*
|
|
Kurtosis(Exc.)
|
-0.2268*
|
-0.0043*
|
Table 4.1 : Analyse descriptive pour les modéle AR (1) et
SETAR.
Note : *indique que les tests sont significatifs a un niveau de
con/lance de 95%.
Chapitre 2
Modèles ARCH et GARCH
2.1 Modèle ARCH
Dans le but de palier aux insuffi sance des
représentations ARMA(p, q) pour les problèmes monétaires
et financiers, Engle propose une nouvelle classe de modèles
autorégressifs conditionnellement
hétéroscédastiques (ARCH) apte à capter le
comportement de la volatilité dans le temps. Le modèle
est formé de deux équations. La première
met en relation le rendement et certaines variables qui l'expliquent et la
seconde modélise la variance conditionnelle des résidus. Le
principe proposé par Engle consiste à introduire une dynamique
dans la détermination de la volatilité en supposant que la
variance est conditionnelle aux informations dont nous disposons. Il avance une
spécification ARCH(p) on le carré des innovations,
c'est-à-dire la variance du terme d'erreur au temps t, dépend de
l'importance des termes d'erreur au carré des p périodes
passées. Le modèle ARCH(p) permet de générer des
épisodes de volatilité importante suivis d'épisodes de
volatilité plus faibles.
2.1.1 Definition et representation
Soit (Xi) un processus AR(1), tel que X = 8+a Xt_1 +"t, avec a
< 1 et "t ~ Al (0, cr2) est un bruit blanc gaussien.
Alors, La moyenne et la variance inconditionnelles de X
s'écrivent :
8
E (Xi) = 1 - a
82
et
V (Xt) = 1 - a2
Aussi :
( )
E Xt/Xt_1= Et_1 [Xi] = 8 + a Xt_1
La moyenne conditionnelle de Xt dépend de l'information
disponible au temps t - 1 et n'est pas nécessairement constante. Par
contre, la variance conditionnelle est fixe et ne dépend de
l'information disponible au temps t - 1 en raison de l'hypothèse de
constance de la volatilité :
( ) ( )
V Xt/Xt_1 = E (Xi - E (Xt))2 /Xt_i
( )
= E €2 t /Xt_i = 2
En fait, l'hypothèse que les résidus soient des
bruits blancs forts nous amène a ce résultat. Un bruit blanc fort
implique que les residus ont une moyenne nulle et ils sont non correlés
dans le temps. De plus, tout comme la variance inconditionnelle, la variance
conditionnelle est constante. Cette dernière condition est peu
réaliste parce que la variabilité dans le temps des variances est
un fait stylisé bien établi en finance.
Exemple 2.1.1 La figure suivante présente une simulation
d'un processus AR(1) :
Figure 2.1 : Simulation d'un processus AR (1).
En effet, le processus AR(1) est un processus gaussien : les
queues de distribution sont moins épaisse que les queues
observées sur la variance de l'indice CAC40 et on n'observe pas de
période de haute volatilité. Les modêles ARCH
(simulé ci-dessous) permettent, eux, de mieux prendre en compte ce genre
de comportement :
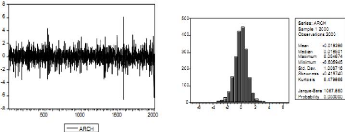
Figure 2.2 : Simulation d'un processus ARCH (1).
Les queues de distribution peuvent être plus
épaisse que celle des lois normales (kurtosis de 6,47 avec les
paramétres choisis), et on observe, comme sur les données
empiriques, des zones de forte variabilité (volatilité).
Commançant par présenter le modèle
ARCH(1).
Modèle ARCH(1)
Supposons que la variable Yt peut être expliqué
dans un modèle dynamique linéaire avec les variables
prédéterminée X et le vecteur de paramétres /,
Yt = X0 t + "t (2.1)
on X est le vecteur des variables exogènes et
correspond aux variables expliquant les rendements, inclus les valeurs
décalé de variable dépendante et t est un
vecteur d'espérance nulle et de variance cr2. On suppose que
"2 t suit un processus autorégressif AR(p)
"2 t = o + çb1€2 t1 + ~ ~ ~ + p"2
tp + Vt (2.2)
avec vt est un bruit blanc. L'ensemble d'information
It1 contient tout les informations qui est disponible a savoir les
donnees de rendements à l'instant t -- 1, ainsi It1 = {Y_1, Yt-2,
;Xt_1, Xt_2, --}. Si le vecteur des parametres est connu, cet
ensemble d'information contient egalement tous les residus a l'instant t -- 1,
puisque
st-i = Yt-t -- Yt_tr3, i = 1, 2, ...
La variance conditionnelle de 4, t ;peut etre ecrit
comme suit :
ht = V = E [E? (2.3)
donc Et/It_1 s Al (0, hi) :
L'idee d'Engle, mettait la variance conditionnelle de la serie
des carrees des erreurs comme une fonction des erreurs retarde, de temps, de
parametre et variables previsible :
{01 = 0-2 (Et-1, Et-2, ... , t, 13) Et =
nt ht, nt est i.i.d
avec E (rat) = 0 et V (rat) = 1. Il choisit une forme de
fonction pour 14 tel que 4 = c+Ei:_1 cbiE?_i,
avec c > 0 et cbi > 0 pour i = 1, 2, ... ,p et c, {ci}P1 sont
des constantes. Cette condition est necessaire pour 4 soit non negative. On
obtient le modele ARCH(p) , suivant :
|
Et nt ht = nt
|
u uc v +
|
X p
i=i
|
i"2 ti
|
on nt est bruit blanc faible, tel que E (rat) = 0 et V
(rat) = 2 ~: Definition 2.1.1 Un processus Et satisfait une
representation ARCH(1) si
Et =lit ht (2.4)
avec
ht = c + 1"2 (2.5)
t1
et oit lit est bruit blanc faible, tel que E
(rat) = 0 et V (rat) = 2 ~:
Dans ce systeme, le processus Et est caracterise par des
autocorrelations nulle E (EtE8) = 0 pour t =6 s ce qui signifie que
les termes d'erreurs Et sont non correles dans le temps. En effet, Et reste un
bruit blanc mais dit faible. Un bruit blanc faible implique que les residus ont
une moyenne nulle et ils
sont non corrélés dans le temps. Ainsi, la
variance conditionnelle varie dans le temps, mais Et est non conditionnellement
homoscédastique, c'est-à-dire qu'il y a l'existence d'une
variance inconditionnelle finie.
On peut établir des résultats
intéressants, nous pouvons écrire le modele ARCH sous deux autres
formes. Prenons un modele ARCH (1) pour les illustrer.
1. Forme d'équilibre :
4 = .2 + 01 (4_1 - a2)
Sachant que a2 = 1-01, c nous retrouvons la
forme habituelle du modele ARCH (1) ainsi :
14 = 1 + 01 (Et-1 C C 01 1 -- 01 )
C
2
= + 01Et-1 ~
1 -- 01 1 1C -- 01
= C + 014_1.
2. Autorégressive dans les erreurs au carré
"2 t = h2 t + Vt
oil vt = 4 - N.
Et en ayant les informations disponibles jusqu'au temps t-1 : E
[vt/It_i] = E [Et/1-t_1] -- E
[ht/1-t_1] = ht2 -- ht2 = 0 est processus d'innovation pour
E?. Ainsi cette écriture précédente
correspondant çà celle d'un processus AR (1) sur le carré
E?
Et2 = C + 01E2t--1 + Vt- (2.6)
On sait que ce processus Et est stationnaire au seconde ordre si
et seulement si 1011 < 1, c'est à dire que la variance marginale est
constante. Exemple 2.1.2 Les graphiques montrent l'évolution des
processus Et dans
le cas d'un modèle ARMA a gauche, d'un modèle ARCH
(1) au centre, et du rendement de l'indice CAC40 a droite.
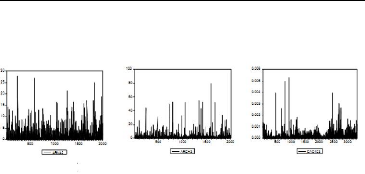
Figure 2.3 : L'~evolutions de processus E2 t .
Exemple 2.1.3 Les graphiques ci-dessous permettent de comparer un
processus AR (1) et un processus ARCH (1)
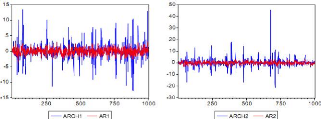
Figure 2.4 : Comparaison entre les processus AR (1) et
ARCH
(1).
On peut déduire de ces différentes
écritures, un certain nombre de propriétés qui pourront
être étendues au cas des processus ARCH (p).
2.1.2 Propriétés des processus ARCH
Propriété 2.1 On peut noter que pour tout s > 1
: E (€t/It~s) = 0, cela signifie que le processus ARCH est orthogonale a
tout passé.
Preuve. Pour demontrer cela on utilise la propriete des
esperances iterees. En effet, on montre
E [Et/It-8] = E [E /It-5]
= E [0/1-t_8]
= 0

Propriete 2.2 La variance conditionnelle du processus Et, ARCH
(1) , definit par l'equation (2.5) est non constante dans le temps et
verifie :
|
V [Et/it,' = C
|
1 ~ s ~
1 + s 1"2 ts; 8t: 1 -- 01
|
C'est la propriete centrale des processus ARCH : le processus
Et a une variance conditionnelle depend du temps. On a l'idee que la liaison
temporelle passe par l'intermediaire de l'equation autoregressif definie sur le
carre du processus (2.6).
Preuve. On sait que E [Et/It_s] = 0 des lors, V
[Et/it-s] = E [4/1t-8] : Considerons le processus Et
definie par la relation (2.6) on vt est un bruit blanc faible. Par iteration
successive, on a :
E? = c + 01 + 2 1 +
·
·
· + s1 ~ +
vt + ~1vt~1
1
+0204_2 + ~ ~ ~ +0,91 -174_5+1 +os1"2t-8
En considerant l'esperance conditionnelle de chacun de ces
nombre, il vient :
Xs ~ 1
E "2 t Its ~ = c 1 ~ s ~
1 + j 1E [vt~j~It~s]
1 ~ 1
i=o
~ :
+s 1E "2 tsIts
Puisque par definition du bruit blanc, on a
E[vt_i/lt,]= 0, Vj = 0, 1, , s-1, et par definition E
[Et2_,/it-8] =

Et_,, on obtient ainsi la formule de la variance
Lorsque s tend vers l'infinie, ces variance conditionnelle
converge vers la variance non conditionnelle, et l'on retrouve alors la formule
:
V ["t] = uim
8--+oo
V [€t/7t-s]
L L1 ~ qs ] ]
1
= uim + qs 1"2 ts
s!1 1 - qi
C
=
1 - q1 .
Propriété 2.3 Les autocovariances conditionnelles
du processus €t, ARCH (1), définit par l'équation (2.5) sont
nulle
Cov ["t; Et+k/1t_s] = 0.
Le processus est donc un processus sans
mémoire.
Preuve. Cette propriété s'obtient de la
façon suivante :
Cov ["t; Et+k/1t_s] = E [EtEt+k/It_s] = E
["t/It-s] E [Et+k/It_s]
= E ["t"t+k/It_8]
= E [E ("t"t+k/IJt+k_1) /Zt-8] = E [€tE ("t+k/Zt+k_1)
/Zt-8] = E ["t 0/Zt_8]
= 0
car €t+k est connu en t + k - 1, on a donc
E ["t 0/Zt_8] = 0 ~

L'absence de corrélations entre les valeurs d'un
processus ARCH est une caractéristique très importante de cette
famille de modèle, qui les rend utiles pour modéliser certaines
séries financières1, comme le font remarquer Bera et
Higgins [1993].
Propriété 2.4 La variance marginale du processus
Et existe si et seulement si C > 0 et 0 < q < 1, d'oit le processus
t est stationnaire au seconde ordre.
1Remarquons néanmoins que l'absence de
corrélations entre les valeurs d'un processus ARCH n'implique pas que
ces valeurs soient indépendantes. Comme nous le verrons
plus loin, des corrélations non linéaires
peuvent en général exister entre les observations. Ce
phénomène est possible puisque la distribution du processus n'est
pas gaussienne mais seulement conditionnellement gaussien.
|
v u u
ht = tc +
|
X p
i=i
|
0i"2 t_i
|
En effet, il convient de vérifier notamment que V [4]
et V [Et] sont définies de façons positive. Sous la condition c
> 0 et 0 < 01 < 1, la variance marginale de Et existe et elle est
constante dans le temps, donc le processus Et est stationnaire au seconde
ordre.
On peut en outre établir les moment conditionnelle et non
conditionnelle d'ordre quatre existe du processus Et.
Propriété 2.5 Le moment conditionnelle centre
d'ordre quatre du processus Et verifie
E [4/1-t_s] = 3 (c + 014_02
Sous l'hypothese 302 1< 1, le moment non
conditionnelle centre d'ordre quatre du processus Et est egale
à
E [Et] = 3 [c2 201c2 + 021E [Et2_1]]
1-- 01
= 3
c2 (1 + 01)
(1 -- 30T) (1 -- 01)
La kurtosis (ou le coefficient d'applatissement de Ficher) non
conditionnelle associee au processus ARCH(1) est
|
Ku =
|
E [E:]
|
= 3 I 1 -- -1
> 3
L1 -301JJ
|
|
E2 [4]
|
Sous l'hypothése de positivité du
paramétre, 0i, la kurtosis non conditionnelle est toujours positive a
celle de la loi normale : elle traduit l'aspect leptokurtique de la
distribution du processus Et. C'est donc la deuxieme raison avec la variance
conditionnelle dépendante du temps pour laquelle les processus ARCH sont
trés utilisé pour représenter les séries
financieres ou les résidus de modele linéaire définis sur
série financiere.
Tout ces propriétés peuvent etre
généralisées du cas d'un processus ARCH(p) .
Modèle ARCH(p)
Définition 2.1.2 Un processus Et satisfait une
representation ARCH(p) si
Et = ht (2.7)
avec
et ofi ijt désigne un bruit blanc faible, tel
que E [t] = 0 et
V [t] = o2 ~.
Les caractéristiques distinguée de ce
modèle n'est pas seulement que la variance conditionnelle est une
fonction de temps mais aussi c'est la forme particulière est
spécifier. Les épisodes de la volatilité sont
généralement caractérisés comme les chocs pour la
variance dépendante. Dans le modèle de régression, un choc
grave est présenté par un grand écart type, d'oñ
présenter par une grande valeur positive ou négative de €t.
Dans les modèles ARCH, la variance de l'erreur courante, conditionnelle
sur l'erreur réalisée "t_1est un fonction croissante de l'ampleur
des erreurs retardées sans tenir compte leur signe. p détermine
la duré de temps avec laquelle les chocs persistent a faire conditionner
la variance des erreurs.
Exemple 2.1.4 Ce phénoméne est illustré a la
figure (2.5) oh des processus ARCH (p) sont simulés pour
différentes valeurs de p :
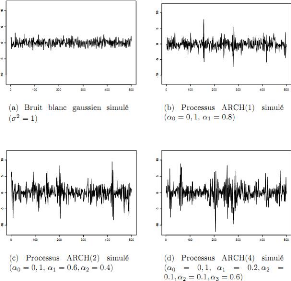
Figure 2.5 : Simulation de processus ARCH pour
diff~erente
retards.
Exemple 2.1.5 Donc, la volatilité a la date t est alors
une fonction des carrées des écarts a la moyenne observés
dans le passé proche. Si les coefficients Pi sont tous
positives (assez grands), il y a un persistance des niveaux de
volatilité : on observe des périodes de forte volatilité
suivies des périodes de faible volatilité.
Plus généralement, les moments centrés
d'ordre impaire, s'ils existent sont nulle, par symétrie. En supposant
que le processus demeure infiniment loin dans le passé avec les 2r
premiers moments finis, les moments d'ordre 2r existe si et seulement si (Engle
[1982])
Pr
1
Yr
i=1
(2i - 1) < 1.
Modèle avec erreur ARCH
On considére dorénavant non plus un processus
ARCH pour modéliser directement la série financière, mais
les résidus d'un modèle linéaire. Prenant l'exemple d'un
modèle linéaire autorégressif avec résidus de type
ARCH (p).
On procéde la définition générale
d'un processus autorégressif et d'un processus autorégressif
linéaire <<Gouriéroux [1992]>> .
Definition 2.1.3 1) Un processus stochastique X est un processus
autorégressif, AR, d'ordre k si et seulement si :
[ ]
X = E Xt/Xt~i + "t
= E [Xt/Xt_1, Xt_2,..., Xt_k] + €t
2) Un processus stochastique Xt est un processus
autorégressif linéaire, AR, d'ordre k si et seulement si :
[ ]
X = EL Xt/Xt~1+ Et
= EL [Xt/Xt_1, Xt_2,..., Xt_k] + "t
ofi EL (.) désigne l'espérance linéaire,
avec € est un bruit blanc faible, tel que
E [€t "5] = 0, si t =6 s
et
E ["t] = 0
satisfaisant la condition
E = 0.
On suppose que ce résidu admet un représentation
autorégressif de type ARCH (p)
Et = pit ht
avec
|
,\Iht = c +
|
X p
i=i
|
0t E?-t
|
et oft pit désigne un bruit blanc faible.
On a un modele qui décrit a la fois l'évolution
de l'espérance conditionnelle et la variance conditionnelle du processus
Xt dans le temps. Envisageons le cas le plus simple d'un processus de type AR
(1) avec erreur ARCH (1)
Xt = S + aXt_i #177; Et, lad < 1 Et = \/c + 014-1
Dans ce cas les résidus satisfont les principales
propriétés étudiées
précédemment2 :
i) le processus (Et) est orthogonal aux valeurs passées,
pour quelque soit le retard
E [Et/It_8] = 0, pour tout s > 1,
la variance conditionnelle
V [Et/it-i] = c + 014-i et suit un processus ARCH (1)
2 2
Et = c 0lEt-1 #177; pit.
ii) la propriété d'orthogonalité implique
que les corrélations conditionnelles sont nulle : coy [Et,
Et+k/it_8] = 0.
Il y a donc une absence de corrélation entre les valeurs
présentes et futures du processus, quels que soient les retards s et k.
Mais si la variance
2Les propriétés de processus
d'innovation vt
·
conditionnelle de Et n'est pas constante, la variance non
conditionnelle est constante.
On peut, en outre, en déduire un certain nombre de
conclusion quant au processus Xt lui même. On peut montrer tout d'abord
que l'espérance conditionnelle de Xt vérifie :
E [Xt/ Xt_s] = S + a E [Xt_i/ Xt_s] ;
ce qui montre que les prévisions non linéaires de
Xt s'obtient comme les prévisions linéaires d'un processus AR
(1). Plus généralement
Xt = ~ 1 ~ ~s + ~sXt~s + "t + ~"t1 + ~ ~ ~ +
~s1"ts+1
1 ~ ~
En prenant l'espérance conditionnelle de deux
cotés, on obtient
1
E [Xt/ Xt_s ] = -- + asXt-.9
·
1 --a
De même façon, on peut montrer que la variance
conditionnelle de Xt dépend du temps. En effet, on montre qu'elle
dépend du processus EL de la façon suivante.
Propriete 2.6 La variance conditionnelle du processus AR (1)
avec erreur ARCH (1), Xt, s'ecrit
[1
1 01_
v [xt/xt_d 1
= -- 6. 01 1 -- a2 a25 01 01 -- a2a28 +0
~
s 1 ~ ~2s 2
2 Et-8
01 -- a
Ainsi, la variance conditionnelle d'un erreur de prevision a
l'horizon 1, s'ecrit
V [Xt/ Xt_s] = S + 014,
Preuve.
v [xt/xt_s ] = V [6
as-8+1/Xt-8
1 -- a + as Xt-8 + Et +
= V [Et/Et-9] + a2V [Et-i/Et_s]
a2(5-1)T 7
V [Et-5#177;1/fit-s]
1 -- as
=
Xs _ 1
J=0
~
1- 01
[ (1 1 _-- a2 8) 01 (01 __
aa228 #177;
=
-- a25 2
1
E.
-- a2 .-8
1 [ 0
1
"
~ 1 ~ sj
~2j 1 + sj
1 "2 ts
1 -- 01

En conclusion, si l'on désire prévoir le processus
X dans le cas d'erreur ARCH (1), l'erreur de prévision a une horizon
d'une période admet une
[ ]
variance V Xt/Xt_5qui varie dans le temps en
fonction de la valeur de
[ ]
"2 t_s; autrement dit V Xt/Xt_5= I (st_S).
Exemple 2.1.6 Le graphe ci-dessous correspond a la simulation
d'un tel processus, avec a droite son corrélogramme,
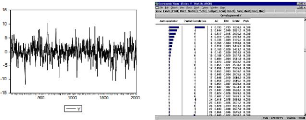
Figure 2.6 : Simulation d'un processus Y et
son
corr~elogramme.
Le corrélogramme partial suggére de tester un
modéle autorégressif d'ordre 1 sur X . Toutefois, si l'on
étudie la distribution des résidus du modéle X = 8 + aXt_1
+ €t, l'hypothêse de normalité est clairement
rejetée
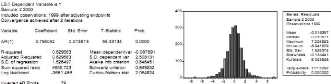
Figure 2.7 : Le test de Jarque-Bera.
Le corrélogramme ne permet pas de rejeter
l'hypothêse de bruit blanc, mais le corrélogramme ne permet de ne
mesurer qu'une dépendance linéaire
entre € et "t_1. L'idée peut alors
être de tester le caractére ARCH des résidus obtenus, pour
expliquer cette forte kurtosis,
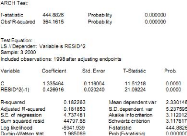
Figure 2.8 : Le test ARCH.
Ce test est alors clairement significatif, et l'on valide
l'hypothêse de modêle ARCH pour les résidus. Le modêle
est
alors
JX = 0:79404 Xt_1 + "t oh t = t 1:335464 + 0:42691"2
t_1 et oh (t) est un bruit blanc gaussien.
2.2 Les modêles ARCH
généralisées
Pour de nombreuses applications, l'introduction d'un grand
nombre de retards p dans l'équation de la variance conditionnelle du
modèle ARCH (p) est nécessaire pour tenir compte de la longue
mémoire de la volatilité qui caractérise certaines
séries monétaires et financières. Ce nombre important de
paramètres peut conduire a la violation de la contrainte de
non-négativité de la variance et poser des problèmes
d'estimations. Dans cette perspective, une extension importante, le
modèle autorégressif conditionnellement
hétéroscédastique généralisé (GARCH),
est suggérée par Bollerslev [1986]. Cette approche exige moins de
paramètres a estimer que la formulation ARCH (p) pour modéliser
les phénomènes de persistance des chocs. La variance
conditionnelle de la variable étudiée est
déterminée par le carré des p termes d'erreur
passés et des q variances conditionnelles retardées.
2.2.1 Modèle GARCH(p, q)
On continue de considérer un modèle
autorégressif exprimé sous la forme
[ ]
X = E Xt/Xt_1+ €t avec t est
un bruit blanc faible et satisfaisant la
propriété E ["t/Zt_i] = 0.
Ces modèles ont été introduits avec une
dynamique autorégressive,
"t = ~ h (2.7)
l'équation de la variance conditionnelle d'un processus
GARCH s'écrit :
|
ht =
|
u u tc v +
|
X p
i=1
|
çbiE2 t_i +
|
X q
j=1
|
jh2 t--j
|
on ijt .,A/ (0, cr2), et avec les
conditions c > 0, çb > 0, pour i = 1,
2,..., p et j > 0, pour j = 1, 2,..., q satisfaisante pour
garentir la posivité de h2 t .
Definition 2.2.1 1) Drost et Nijman [1993] ont convenu d'appeler
GARCH faible weak GARCH .> tout bruit blanc faible Et si
i) E ("t/Zt_1) = 0, pour t E Z.
Cette propriété appelée différence
de martingale (tout au moins par rapport a la filtration naturelle).
ii) Il existe des constantes c, i, i = 1,2,... ,p et
j, j = 1,2,... q telles que :
h t = V ("t/Zt_1) = c + X p çbiE2 t_i + X q
jh2 tj, pour t E Z.
i=1 j=1
2) Lorsque le processus d'innovation Vt et E2 est
lui même seulement supposé être un bruit blanc faible, alors
qu'ils appellent GARCH semi-fort «semi-strong GARCH .> le même
processus €t lorsqu'il s'agit d'une différence de martingale avec
un processus d'innovation Vt qui est lui même une différence de
martingale. Les processus GARCH semi-forts ainsi définis coIncident bien
avec l'idée initiale de Engle et Bollerslev puisqu'il est clair
réciproquement que si l'on suppose que Vt est une différence de
martingale, on en déduit que :
Vt = 2 t - h2 t
oh h t est bien la variance de €t conditionnelle
a l'information passée.
Definition 2.2.2 On dit que le processus GARCH (p, q) fort dans
le cas
d'un GARCH semi-fort tel que l'innovation standardisée Vt =
€t/h soit
un bruit blanc fort (suite de variables indépendantes
et de même loi) et
t ' JV (0, 1).
En fait, la popularité des processus GARCH faibles dans
la littérature récente, à la suite des articles fondateurs
de Drost et Nijman [1993], Drost et Werker [1996] et Nijman et Sentana [1996],
s'analyse sans aucun doute comme le résultat d'une prise de conscience
d'un risque de modèle <<GARCH semi-fort>> d'autant plus
manifeste qu'il est aisé de montrer que la classe des processus GARCH
semi-forts n'est robuste vis à vis d'aucun type d'agrégation.
Plus précisément, ils ont d'abord montré que si des
rendements quotidiens sont conformes à un modèle GARCH semi-fort,
les mêmes rendements considérés sur un horizon plus long
(par exemple hebdomadaire) ne peuvent pas l'être. Autrement dit, la
classe des processus GARCH semi-forts n'est pas robuste vis-à-vis de
l'agrégation temporelle et c'est pourquoi ils ont proposé de
l'étendre à tous les processus qu'ils appellent GARCH faibles
pour récupérer cette robustesse. De façon
générale, dans la mesure on il n'existe aucune norme
d'agrégation, ni temporelle ni contemporaine, qui s'impose à
l'utilisateur, le concept de <<GARCH faible >> peut apparaitre
comme la panacée pour évacuer un risque de modèle trop
patent.
Pour motiver l'introduction des processus GARCH, on peut
réécrire (2.7) à l'aides des opérateurs 1' (.) et W
(.). Dans ce nouveau contexte, ces opérateurs sont définis par
~ (L) = ~ L + b2L + ~ ~ ~ + ~pLp
et
W (L) = 1L + 2L2 + ~ ~ ~ + qLq.
On peut donc écrire
q"t = t + (L)"2 t + W (L)
h2t
on L est l'opérateur de retard.
On a donc,
h2 t = c + '(L)s2 t + W(L)h2 t . (2.8)
Si toutes les racines de 1 -- (L) sont en dehors du cercle
unité, on a :
2
c 0 (L) 2
ht +
t 1 - (L) 1 -- (L)Et .
Si la fonction rationnelle de l'opérateur de retard est
développé en série, propriété (3), on se
trouve :
00
h2 t = c + i=i 'i"2 ti
avec c* > 0 et (pi > 0, pour i = 1, 2, ....
Cette dernière relation montre qu'un processus GARCH
(p, q) est un processus ARCH d'ordre infini. On voit donc que les processus
GARCH peuvent formellement représenter de façon plus
parcimonieuse des processus ARCH contenant un nombre élevé de
paramètres.
Dans la suit, on montre que le modèle GARCH peut
être représenté comme une modèle ARMA dans les
erreurs au carré. Posant que vt = E? -- h4 avec E (vt) = 0, E (vt
v5) = 0 pour t =6 s et E[vt/It_i] = E [E? --
ht2/1-t_1] = 0. Il satisfait la condition de
bruit blanc, on peut écrire E? = h2 t + vt, cela donne :
|
2
Et = c +
|
X p
i=i
|
i"2 ti +
|
X q
J=1
|
~"2 t~i- vt_i) + vt.
j
|
|
Il s'ensuit que,
2
Et = c +
|
Xn
i=i
|
(Oz + z) -
|
X q
J=1
|
jvt~j + vt, t 2 Z
|
avec n = max (p, q).
Proprietes des processus GARCH
Les propriétés théoriques des processus
GARCH se déduisent de la
même façon que nous avon développé les
propriétés des processus ARCH. Propriete 2.6 Le
processus Et est un bruit blanc si E (E?) < oo.
On a
E(Et) = E [E(Et/It_i)] = 0
et
cov(Et, Et-k) = E(EtEt-k) = E(Et_kE(Et/it_i)) = 0, k > 0.
Lien avec les propriétés des séries
financières : non autocorrélation de €t (quelle que soit la
spécification de h2 t ), autocorrélation de €2
(ici ARMA).
Le calcul de la variance dans le cas général
n'est pas direct. Bollerslev a montré que, dans le cas
général, la variance du processus reste finie si la somme des
paramètres est plus petite que 1.
Propriété 2.7 Une condition nécessaire de
l'existence de la variance d'un processus GARCH (p, q) est
~ (1) + W(1) = X p ~i + X q 3 < 1 (2.9)
i=1 j=1
Si cette condition vérifie avec les contraintes de non
négativité donnée ci-dessus, elle est également
suffisante. Donc le processus GARCH est faiblement stationnaire ou stationnaire
au seconde ordre.
Dans le cas on (2.9) est saturée, c'est a dire que Pp
i=1 cb + Pq j-_i ., = 1, on dira alors que le processus GARCH est
intégré, et on parlera de processus IGARCH.
Propriété 2.8 Le processus €2
d'une représentation GARCH (p, q) peut être
représenté sous la forme d'un processus ARMA (max (p, q), q)
définie dans une innovation vt = €2 t - h2 t , tel que :
€2 t = c + Xn (çbi + i)€2
t_i - X q jvt_3 + vt (2.10)
i=1 j=1
avec la conversion çb = 0 si i > p et j = 0 si j >
q.
Cette observation amène deux conditions immédiates
:
1. Bien que les valeurs €t d'un processus GARCH soient
non corrélées, il existe une dépendances non
linéaires entre les observations, puisque que le carré des
observations se comporte formellement comme un processus ARMA;
2. Pour identifier le nombre des paramètres p et q
d'un processus €t ~ GARCH(p, q), on peut utiliser les fonctions
d'autocorrélation et d'autocorrélation partielle du processus
€2 suivant la même procédure utilisée pour
trouver le nombre de paramètres d'un processus ARMA.
Dans la section suivante, on définit un cas particulier de
ce processus, processus GARCH (1, 1), et ses propriétés.
2.2.2 Modele GARCH (1, 1)
Pour modéliser les données empirique sur le
marché, financiere, un modele GARCH (1,1) est souvant suf fisante. Il
est donne par l'équation
Yt = Xt' 0 + Et, Et = Tit ht
et ht = \/c + 0"2t_1 + h2t-1
avec c > 0, 0 > 0 et > 0. Dans ce modele, les
carrés des résidus suit un processus ARMA (1,1),
"2t = c + (0 + ) "2t-1 -- vt-1 + vt
Il est stationnaire pour 0 < 0 + < 1, oft vt =
E2t -- h2t est un processus
d'innovation pour "2t. Sous la condition de
stationnarité de second ordre, la variance inconditionnelle du processus
Et existe et constante au cours du temps. Sachant que V (Et) = E
(E2t) , il suffit a partir de la forme ARMA
(1,1) sur E2t de définir la variance du
processus : V (Et) = c 0-1 (1) =
c
1-(q+ ).
Selon Jurgen Franke, Wolfgang Hardle et Christian Hafner [2004] ,
la kurtosis existe si
302 + 20 + 2 < 1
|
et donne par :
Ku =
|
E (4) = 3 [1 -- (0 + )2] (E
(€t ))2 1 -- (0 + )2 -- 202
|
Elle est toujours supérieur a trois. Ainsi, si 0 tend
vers zéros, l'hétéroscédasticité est disparu
et la valeur de la kurtosis tend vers trois. Enfin, on peut montrer que pour un
processus GARCH la kurtosis est directement liée a
l'hétéroscédasticité conditionnelle.
Considérons le cas de la kurtosis associée a la
loi non conditionnelle dans un processus GARCH conditionnellement gaussien tel
que Tit rs, Ai (0, 1) . Dans ce cas, les moments
conditionnels d'ordre 2 et 4 du processus Et sont liés :
E 4/It-1] = 3 [E [4/It-1]] 2 .
En effet, on rappelle que si une variable centrée x suit
une loi normale, alors
E (x4) = 3 (V (x))2 = 3 (E
(x2))2 .
Si on applique l'espérance sur les deux cotés de
l'équation précédent, il devient
E [E [4 /1-t_i]] = E [4]
3E [[E [4/1t-1 ]]2] 3 [E [E [4/1t-i]]] 2
= 3E [4] .
On peut déduire que la loi marginale de Et a des queues de
distribution plus épaisse (distribution leptokurtique) qu'une loi
normale puisque
E [Et] 3E [4] .
(E (€i ))2
De plus, on peut calculer la kurtosis comme suit : Ku
= 3 [E [E [4/1t_1]]]2
|
= 3(E (4))2 + (E (€i
))2
|
3 (E (E?))2 [ [E [4/It-1 ]] 2 - (E
(ED)2]
|
= 3 + 3 (E (4))2 [[E [4/Z-1 ] ] 2 - E (E (4/1t-1))2]
3 + 3V [E [E? /It-i]]
=
(E (4))2
la kurtosis est donc liée a une mesure de
l'hétéroscédasticité conditionnelle.
Modeles ARMA-GARCH
C'est Weiss [1986] qui a introduit dans la variance
conditionnelle des effets additionnels de variables expliquées. En
effet, la modélisation GARCH peut être appliquée
non au processus initial, mais au processus d'innovation. Ceci permet alors
d'introduire divers effets additionnels de variables explicatives soit dans la
moyenne conditionnelle, soit dans la variance conditionnelle. Par exemple, on
peut considérer un modele de régression linéaire avec
erreurs GARCH :
fYt = a Xt + Et
lEt ' GARCH (p, q)
Ce modèle est appelé modèle de
régression avec erreurs GARCH. Dans le deuxième cas, le
modèle consiste en un processus ARMA avec un processus d'innovation
GARCH :
~
~ (L) Xt = ~ (L) "t €t ~ GARCH (p, q) Ce modèle
est appelé modèle ARMA - GARCH.
Chapitre 3
Estimation, prevision et tests
3.1 Estimation
Dans cette section, nous allons traiter l'estimation des
paramètres d'un modèle (C) ARCH, et, plus
généralement, d'un modèle de régression avec erreur
(C) ARCH. Les modèles introduits reposent sur des formulations des
moyennes et variances conditionnelles.
En pratique celle-ci souvent paramétrées de
façon que la moyenne conditionnelle mt (0) et la variance conditionnelle
h t (0) apparaissent comme des fonctions de paramètres
inconnus et de valeurs passées du processus. La connaissance de, ces
moments ne suffit cependant pas sans hypothèse supplémentaire a
caractériser la loi conditionnelle du processus les méthodes
d'estimations sont envisagées :
- La méthode de MV,
- La méthode de PMV,
- La méthode MV sous d'autres lois.
Estimation lorsque les moments sont paramètes
Dans la suite, nous indexons par o les espérances et
les variances calculées par rapport a la vraie loi du processus. Nous
reprenons ici la représentation de Gouriérous. Soit un
modèle tel que :
~E ( )
it/it~1, xt = E (it/7t~1) = mt (0)
( )
V
it/it_1, xt = V0 (it/7t~1) =
h2t (0°) on 00 est la vraie
valeur inconnu du paramètre 0 appartenant a e inclus dans k:
Nous notons :
f M3t (0) = E. (Y3/It-1)
t Ku (0) = Ea (Y4/It-1)
les moments d'ordre supérieure.
Nous commencons par présenter les méthodes du MV et
PMV.
3.2 La methode de MV
Pour comprendre cette approche, nous allons tout d'abord
considérer le cas le plus simple d'un processus ARCH pur pour Y. Nous
étudierons ensuite le cas des processus GARCH, et enfin des modeles de
régression aves erreur (G) ARCH et des modele ARMA -- GARCH.
3.2.1 Estimation des parametres du modele ARCH
L'estimateur des parametres de modele ARCH se base tres
souvent sur la maximisation de la fonction de vraisemblance. Nous supposons que
le processus Yt est conditionnellement gaussien. La vraisemblance
associée a Yt conditionnellement au passé it_1 est donc
(Yt/it-i 0) = 1
exp ( (yt -- rat (6))2)--
r ,
ht Or 2h2t
,
et dépend du vecteur 0 = (00, . . . , Op) . La
fonction de vraisemblance de (yi, y2, ... , yT)conditionnelle a /0 = 0 et par
conséquent
T
r (yi, y2, - - - , yT, 0) = 11 G
(yt/it-1, 0)
t=1
L'estimateur est alors défini comme le vecteur
617-, = (00,..., 0p) qui maximise le logarithme de cette
fonction vraisemblance :
BT = arg max log r (yi, y2, - - - , yT, 0)
3.2.2 Estimation des parametres du modele GARCH
Nous avions observé que l'estimation par MV d'un modele
ARMA est rendue plus dif ficile que celle d'un processus autorégressif
pur, puisque
le processus d'innovation n'est pas directement
observé. Le meme phénomène survient lorsqu'on tente de
maximiser la vraisemblance d'un processus GARCH. En effet, la vraisemblance
associée a Y conditionnellement au passé s'écrit
exp (Yt rat (0))2)
G 0) = 1
ht 2h2t
mais cette fois, la variance 14 suit un processus ARMA et
dépend donc des valeurs passée de la variance conditionnelle hi,
, hT. Ces valeurs n'étant pas observé en pratique, la
maximisation on directe de la vraisemblance est rendue impossible. En pratique,
on estime successivement les
valeurs de hi, , 14, avant de calculer la
vraisemblance. Ainsi, pour un
vecteur 0° = ;c;, 1;..., Q)
fixé de paramètres, on calcul récur-
sivement
|
11,82 =co #177;
|
X p
i=i
|
~~ i Y 2 si +
|
X q
j=1
|
^h2
js~j
|
avec la convention Y = 0 et h? = 0 si i < 0. On remplace donc
la fonction de vraisemblance par
exp (Yt rat (0))2)
G 0°) = 1
htV'2ir 2h?
et la fonction de vraisemblance totale est
r (Yi, y2) YT, °°) = 11 L
(yt~It~1;0°)
t=1
Cette fonction de vraisemblance peut etre calculée pour
différentes valeurs du vecteur 0° et sa maximisatin
livre l'estimateur de MV .
3.3 La methode de PMV
Dans cette approche, l'utilisation de la méthode du QMV
ou PMV est particulièrement intéressante pour les modèles
GARCH car elle est valide, asymptotiquement, pour tout processus GARCH
strictement stationnaire (sous des conditions de régularité
mineures), sans hypothèse de moments
sur le processus observe. Par consequent, la fonction de
vraisemblance definissant l'estimateur du MV sous l'hypothese de normalite et
la fonction de pseudo-vraisemblance de l'estimateur PMV (ou QMV ) sont les
memes.
Les conditions de regularite sont toujours de trois types :
1. des conditions de stationnarite forte du processus,
2. des conditions d'existence des derivees et des moments
apparaissant dans les diverses formules,
3. des conditions d'indentifiabilite des parametres 0, qui
doit pouvoir etre retrouve, sans ambigüite a partir des deux premiers
moments conditionnels.
Definition 3.3.1 La fonction de log-vraisemblance
associée a un échantillon de T observations (yi, y2, .., yT) de
Yt- sous l'hypothese de normalité de la loi
conditionnelle de Yt sachant s'écrit :
|
log LT (0) = - 2 log (27r) -- x-N
t=1
|
1 x-N
log (4 (0)) -- 2
t=1
|
(Yt int (0))2
|
|
|
h? (0) :
|
L'estimateur du PMV OT du parametre 0 est une solution du
probleme :
Exemple 3.3.1 Appliquons cette formule au cas d'un modele de
régression linéaire avec erreur ARCH (p) :
f yt = + Et
1 Et =ratht (0)
avec nt est JV .d. (0, 1) et
|
E (Et/Et-1) = 0; V (Et/Et-1) = c +
|
x-N p
i=i
|
Oz "2 ti:
|
|
V (Yt/it-1) = ht (0) = c +
|
x-N p
i=i
|
(Yt-i OXit-i)2
|
Dans ce cas, on a donc :
E (Yt/It_i) = mt (0) = QXt;
oI ~= (0,c, OD
·
· ;Op)
E IRP+2 La log-vraisemblance
s'écrit :
|
T
log LT (0) = -- 2 log (27r) -- E
t=1
|
log c +
|
X p
t=i
|
(Y-i OXt-i)2)
|
1
2
~
XT
t=i
2 2
(Y-t /3Yt-z) x [C E oz (Yt_i - oxt-z)1
-1
i=1
Definition 3.3.2 Les estimateurs du MV sous l'hypothèse
de normalité ou du PMV, notés OT, des paramètres
0 E Rk, satisfont un système non linéaire a K
équations :
~~~~~=^~T = 0
0 log LT (0)
00
avec
|
0 log LT (0)
00
|
~~~~~=^~T
|
= 2
|
XT
t=i
|
1 Oht (0)
h? (0) 00
|
~~~~~=^~T
|
+E
t=i
|
(Yt -- mt (6))2 Oht (0) N (0)
ae
|
~~~~~=^~T
|
|
+E
t=i
|
Yt -- nit (0)
h? (0)
|
amt (0)
00
|
~~~~~=^~T
|
Remarque : On peut montrer que ce systeme peut se
décomposer en deux sous systemes lorsque les parametres 0 interviennent
de façon séparée dans l'écriture de
l'espérance et de la variance conditionnelle. Ainsi, si l'on a 0 = (a,
0) oft a n'apparait que dans l'espérance conditionnelle et dans la
variance conditionnelle, on peut décomposer ce systeme en deux sous
systeme puisque :
|
0 log LT (a)
0a
|
~~~~~=^~T
|
=
|
XT
t=i
|
Yt -- nit (&) h? (S)
|
amt (a)
as
|
a a
|
|
a log LT (0)
00
|
~~~~~=^~T
|
= 2
|
XT
t=i
|
1
|
aht (3)
00
|
~~~~~=^~T
|
+E
t=i
|
OYt -- nit CO2
|
aht (3)
00
|
|
|
h? C4)
|
N C4)
|
s="4
|
Dans, le cas général du PMV, on sait que
l'estimateur 0 est asymptotiquement normal et que sa matrice de variance
covariance est définie par la formule suivante.
Propriete 3.1 Sous conditions de régularité,
l'estimateur du PMV est asymptotiguement convergent et normal.
-VT (Bt -- 0°) --> Ai
(0,J-1/J-1)
T--K:o
ofi la matrice de variance covariance asymptotigue de
l'estimateur du PMV est calculée a partir de :
|
I_
J = Eo 1 02 log LT (0) 1, I =
EE°10 log LT (0) a log LT (0)1 I_ 00
00' 00 00' i
|
·
|
Naturellement dans la pratique les matrice I et J sont
directement estimées en remplacant l'espérance E0 par
la moyenne empirique et le parametre inconnu 0 par son estimateur convergent 0.
Ainsi, on utilise :
|
J = _1
T
|
T
E
t=1
|
02 log LT (0)
|
~~~~0=.T
|
|
00 00'
|
|
I = 1
T
|
T
E
t=1
|
0 log LT (0)
00
|
~~~~=.T
|
0 log LT (0)
00'
|
=.6T
|
et la variance estimée de OT vérifie alors
V (/T (et -- 61) = k1i j-1 3.3.1 Exemples
Les formules donnant les précisions asymptotiques des
estimateurs du PMV peuvent se simplifier pour certains modeles particuliers.
i) Modeles conditionnellement normaux
La méthode coincide avec la méthode de MV. On a
Ku (0°) = 3, Mat (0°) = 0, et on
vérifie directement que I = J et
V (VT (6 1 t -- 19°)) = j-1 = I-1.
ii) Parametrages independants de la moyenne et de la variance Un
autre cas simple est celui on le parametre 0 peut de décomposer en
0= ( 0) '
a n'apparaissant que dans la moyenne et 0 que dans la variance
:
mt (0) = mt (a) et ht (0) = ht (0) .
Nous avons alors :
|
2 h 1 i
@mt(~~) @mt(~~)
E 0
h2 t (~~) @~ @~0
J = 4h 1 i
@ht(~) @ht(~)
0 E 2h2 t (~~) @~ @~~
|
3
5
|
3
5 -
E0 L
F 1 amt(a0) aht(0 0) m3t (00)]
I = (0) as as r
E° [ 2h3 t / 2 (3°) as aa.
E0 [ 3 [ /41 0 amt
(a° ) amt (a° ) ]
1 ° as aS. amt(a0)
aht(0°) mu (0°)]
/ 2 E
2ht 03 ) r 1
aht(0°) aht(0°) ( K, (0°) -- 1)]
° L4h1(0°) as as' \
Les matrices de variance-covariance asymptotiques des estimateurs
sont :
~ ~
p ~ 1 @mt (~~) @mt (~~) ~~~1
V T (^~T ~ ~~) = E ;
h2 t (~~) @~ @~~
et
~ ~
p ~ 1
^~T ~ ~~~~ @ht (~~) @ht (~~) ~~~1
V T = E ~
2h2 t (~~) @~ @~~
~ 1 ~
@ht (~~) @ht (~~)
E @~~ (Ku (~~) ~ 1) ~
4h2 t (~~) @~
|
[Eo [
|
1 014 (13°) aht (13°)11
2h2t (0°) 00 00
|
-1
|
Plus les queues de distributions conditionnelles sont
épaisses (au sens kurtosis grande), moins les estimateurs des parametres
figurant dans la variance conditionnelle sont précis.
3.3.2 Estimation du MV sous d'autres lois
En pratique, l'hypothese de normalité des rendements ne
caractérise pas toujours le marché financier, en particulier pour
des données de haute fréquence. En effet, les queues des
distributions empiriques des rendements sont généralement plus
épaisses que celles d'une loi gaussienne.
Nous voyons que le degré d'exces de kurtosis est
largement et significativement positif. L'exces de kurtosis positif
représente une distribution a queues épaisses. La valeur
négative de skewness montre une distribution asymétrique
(distribution vers la gauche). Le test de Jarque-Bera conduit
ici naturellement a rejeter l'hypothèse d'une
distribution normale. Trois lois de distribution sont parfois imposées
sur l'aléatoire ijt en dehors de la loi normale : Student,
skewed-student et GED.
Nous allons présenter ces différentes lois.
La distribution de Student
Bollerslev [1987] note que l'utilisation d'une distribution
Student ayant des queues de distribution plus épaisses que la
distribution gaussienne peut résoudre potentiellement ce
problème. Avec une distribution Student. Sur le graphique (3.1), sont
reportées les densités d'une loi normale et d'une loi de Student
a 3 degrés de libertés. On vérifie que cette
dernière admet des queues de distribution plus épaisses que
celles de la loi normale : pour des degrés de liberté faibles, la
distribution de Student est donc une distribution leptokurtique.
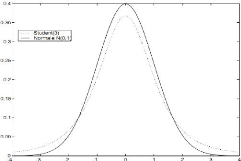
Figure 3.1 : Comparaison entre les distributions
de student et normale
Rappel Si x et y sont deux variables aléatoires
indépendantes, telles que x suit une loi N(0, 1) et y suit une loi du
chi-deux a 9 degrés de liberté,
alors la variable
x
Definition 3.3.3 Si la variable ijt admet une
distribution de Student a 9
degrés de libertés, oh 9 2 N
vérifie 9 > 2, alors la log-vraisemblance associée
a une observation nt et a l'ensemble de
paramètres 0 s'écrit :
log r (0) = log [I' (t9 #177; 2
1)1 - log [1-1 (7 2 )1
~ ~ ~~
1 t
log [~ (# ~ 2)] + log ~h2 1 + 2
~ + (1 + #) log :
t
2 # ~ 2
ofi I' (.) désigne la fonction gamma.
La distribution de Student dissymetrique standardisee
Elle est introduite dans le cadre des divers processus GARCH
par Lambert et Laurent [2001] qui se fondent sur une procedure de Fernandez et
Steel [1998] . Ils l'appliquent a la loi de Student pour definir la Student
dissymetrique qu'ils standardisent afin d'obtenir une densite ecrite en
fonction de l'esperance et de la variance de l'aleatoire1. La
log-vraisemblance correspondance est alors :
log r (0) = log [r (V + 1 )] log [I' (2 V
)1 + log 2 )
1 + log (s)
2
~
2
(s nt + 771 )2 2/ )1
1 [log [71- (V OD - 2)] + log + (1 + V) log 1 + - t
V - 2
avec :
|
M, =
|
F(9 1) 03 -- 2 ~~
~ ~#
2 ~ ~ 1
~ p ~
2
|
S2 = (e + 2 -1 -m2
1
1 si t ~ ~m
0 si nt < --ms
s
It =
~ est un indicateur de dissymetrie tel que lorsque = 1, la
distribution de Student dissymetrique standardisee est egale a la distribution
de Student precedente.
1Student dissymetrique est en effet definie sur un
mode (qui n'est pas l'esperance) et une mesure de volatilite (qui n'est pas la
variance) conditionnels.
La distribution GED
La distribution Generalized Error Distribution (GED) est
définie par :
Definition 3.3.4 Si la variable nt, telle que
E(nt) = 0 et V (nt) = 1, admet une distribution
GED de parametre 73 > 0, sa densite est definie par :
|
171 (nt) =
|
vexp [-12 -
111
A2[(v+1/,9)]r (19)
|
ofL A est une constante definie par :
A = [2-(2/v)r (10)]
r (
3
9)
1
2
:
Si V = 2, alors A = 1 et l'on retrouve la densité d'une
loi normale Ar(0,1). Si V < 2, les queues de distribution sont plus
épaisses que celles d'une loi normale (distribution leptokurtique). Si V
> 2, la distribution est platykurtique. Pour cette raison, elle est souvent
utilisée afin de prendre en compte des effets de kurtosis. On note en
particulier que :
A2(1/v)r (2)
#
E Intl = ~ ~1 ~
#
Préconisée notamment par Nelson [1991], la
log-vraisemblance associée a une distribution de type GED est la
suivante :
Definition 3.3.5 Si la variable nt admet une
distribution GED avec 73 2 IV, alors la log-vraisemblance associee a
une observation nt et a l'ensemble de parametres 0
s'écrit :
log r (0) = log V () 2 1 nt r 2 (1
+73-1) log (2)--log (F (1 --I log
(4)
A A V)) k
ofL F 0 designe la fonction Gamma.
3.4 Prevision
Une application importante de la théorie des modeles
ARCH consiste a évaluer la précision de prévision des
valeurs futures d'une série chronologique. Dans le cas d'un processus
ARMA, nous avons vu que la variance
des prévisions dépend de l'horizon de
prédiction et de la variance inconditionnelle de la série. En
particulier, cette variance est indépendante du comportement local de la
volatilité du processus a l'instant on on s'apprête a calculer les
intervalles de prévision. Par contre, en ajustant un modele GARCH, nous
allons voir suivant Bera and Higgins [1993] comment il est possible d'utiliser
cette volatilité locale pour mesurer les intervalles de
prévision.
3.4.1 Modele avec erreur ARCH
Supposons un processus AR (1) sans constante pour
modéliser la moyenne conditionnelle
Xt = 0Xt_i + Et
on Et/it_1 rs, Ar(0, ht2).
L'erreur suit un processus ARCH (1) de variance conditionnelle tel que ht = c +
014_1. Nous avons dérivé précédemment les
espérances et variances conditionnelles du processus ARCH. Nous
connaissons aussi les formules pour les prévisions XT+h et le
erreurs de prévisions E4,#177;h d'un modele AR (1) supposant
un bruit blanc fort des résidus. Le prédicteur optimal XT+h est
la moyenne de ces prévisions, conditionnellement a l'information it
disponible a l'instant T. Plus spécifiquement,
E (XT#177;h//t) = 0hXt
V (ET#177;h//t) = E [4-Fh + 02E4-'#177;h-i +
·
·
· + (0h-1)2 E9
+1
+ terme croises/It] (oh-1)2
= E [E4,#177;h/lt] + 02E [4+h-1//t] E
[4+1/1-t] + 0.
Sachant que E [4+h/It] = E [4+h_1/It] =
·
·
· = E [4+1/1-t] = o-2 et la formule se simplifie
ainsi :
V (ET#177;h/it) = (1 + 02 + . . . +
(0h-1)2) 2.
Dans le cas d'un terme d'erreur ARCH (1), nous avons
montré que les erreurs au carré suivent un processus AR (1)
"2 t= c + 014-1 +vt on E(vt) = 0. Ainsi, nous avons
E (4#177;h/lt) = c + 0iE (4+h-1/It)
E (4#177;1/1t) = c + 0iE (4/10 = c + 014
E (4+2//t) = c + 01E (4+1//t) = c + 01 (c + 014) = c 01c +
0T4
E (4#177;h/lt) = c + 0ic +
·
·
· + 0h1"2T
Il s'agit alors de remplacer les termes appropries dans
l'equation suivante :
V (ET#177;h/lt) = E [ET2 #177;h/it]+02E
[4+h-1/z] +. . .+ (oh-1)2 E [4+1/1-t] .
Ainsi, les acteurs des marches financiers peuvent etablir
leurs previsions de la volatilite a partir des informations les plus recentes
dont ils disposent. Dans le cas du modele GARCH (1,1), nous avons :
ht = c + 014-1 + 1h2t-1
En supposant que les donnees jusqu'au temps T sont disponibles,
la prevision de la variance conditionnelle d'une periode est
117+1 = 117,2 (1) = c + 01E7,2 + 1h2T
Il est possible d'ecrire la prevision d'une autre maniere et
en particulier la prevision de plusieurs periodes. En mettant Et = ntht au
carre, nous obtenons l'expression E? = 704. Remplagons cette expression dans la
formulation du modele GARCH (1,1), nous avons
h? = c + oi (74_14_0 + 14-1
Inserons maintenant l'expression cbiht2_1
-- cbiht2_1 dans l'equation precedente
4 = c + oin?_14_1 + 1h2t_1 + olq_i -- olq_i
= c
+ (cbi + l) 4_1 + 014_1 (alt-1 -- 1)
A partir de cette formulation, nous pouvons ecrire la
prevision de la variance conditionnelle de plusieurs periodes. D'abord, la
prevision d'une periode est
14 (1) = c + (01 + i) 14 + 014 (74 -- 1) Pour la
prevision de deux periodes, nous avons
114-, (2) = c + (01 + 1) 4+1 + 014+1 (74+1
-- 1) Sachant que E [(4+1 -- 1) /It] = 0, alors
14 (2) = c + (01 + 1) 4+1
= c + (01 + 1) (c + (01 + 1)4 + 0114 (74
-- 1))
Pour la prévision de trois périodes, nous
avons
h2 T (3) = c + (1 + 1) h2 T +2
= c+(01+ 1)(+ (01 + i)(C + (01 + 04 + 014 04, --
1)))
Ainsi, en répetent les substitutions, pour la
prévision de h périodes, nous avons
hT (h) =
|
[1
~(°1 + 1)11-1]
1 -- (01 #177; i) #177; (01 + i)h-1 14 (1) .
|
|
Et quand h oo, la variance conditionnelle tend vers la valeur
d'équilibre i_(0:+ ) .
3.4.2 Modele avec erreur GARCH
Partons du processus ARMA (r, s)
0 (L) Xt = 111 (L) Et (3.1)
on 0 (L) = 1-01L-02L2--
·
·
·--OrLr, w (L) = 1- 1L-
2L2--
·
·
·--
8L8 et Et est un processus GARCH (p, q).
Supposons que l'on observe cette série jusqu'au temps T. Toute
prévision XT+h a l'instant T + h reproduisant la structure de
la série est de la forme
XT+h =
|
r
i=i
|
~iXT +hi ~
|
Xs
j=1
|
jET-Fh--i + "T +h:
|
|
Le prédicteur optimal XT+h est de la forme :
XT+h = E [XT#177;h/lt]
=
|
r
i=i
|
OiE [XT +hiIt] ~
|
Xs
j=1
|
jE [ET-Fh-j/it] + E [ET#177;h/lt]
|
|
=
|
r
i=i
|
OtE [XT +hiIt] ~
|
Xs
j=1
|
jE [ET-Eh-J/1d
|
|
puisque E [ET#177;h/lt] = 0.
Considérons le cas du processus AR (1) on 101 < 1 et
Et est un processus GARCH (1,1). En effet, dans le cas d'erreurs GARCH, nous
savons que
les erreurs au carre suivent un processus ARMA (1,1) et les
previsions des erreurs au carre sont :
4 = c +(01+ 1) 4-1 + vt ~ 1Vt-1
L'esperance conditionnelle par rapport a it de cette relation
permet d'obtenir E [E4,#177;h/lt] en fonction de E
[E4,#177;h_i/It] pour i > 0.
E [ET2 #177;i/it] = c + (01+ 1) "2 T iVT on VT =
hT2 -- Et2
E [4+2/It] = c + (01 + 1) E [E7,2 +1/1-t ]
= c + (01 + 1) (c + (01 + 1) ET 2 ivT)
E [4-Fh/lt] = c + (01 + 1) E [ET2 #177;h-i/it]
·
3.4.3 Erreur de prevision
Calculons a present l'erreur de prevision dans le but de
determiner les intervalles de prevision. En considerant que les parametres ai
sont compatibles avec l'hypothese d'inversibilite du processus, le modele (3.1)
peut se reecrire sous la forme d'un processus MA (oo), et on peut donc ecrire
:
on est le coefficient du developpement de 0-1 (L) W
(L) . En utilisant cette representation pour calculer le predicteur optimal, on
peut ecrire :
XT+h = X1 jET-Fh-i
i=h
et on en deduite l'erreur de prevision :
ET (h) = XT +h ~ XT+h
La precision de la prevision peut a present etre mesuree par la
variance de ET (h) conditionnellement a l'information it disponible a l'instant
T :
Xh _ 1
i=0
V [ET (h) /1t] =
-)/E [4+h-z/it]
Nous pouvons à présent voir la grande
différence entre la prévision avec ou sans erreur ARCH dans le
processus d'innovation : si un erreur ARCH est présent, alors E
~"2T+h_i/It] dépend en général le temps, donc
du point de référence à partir duquel la prévision
est effectuée. A l'inverse, dans le cas d'un modèle
homoscédastique dans lequel E ["2 T +h_i/It ] = 2, la
variance de la prévision des erreurs se réduit à Ph_1
i=0 'y2 i a2 ne dépend pas
de l'ensemble d'informations contenues dans It.
3.5 Identification et tests
Nous avons déjà indiqué que l'analyse de
la structure de corrélations du carré des observations d'un
processus GARCH (p, q) permet de déceler l'ordre du modèle. Nous
allons considérer dans cette section le problème plus
général du choix de l'ordre d'un modèle ARMA-GARCH et nous
verrons comment développer des tests pour les identifier. Nous savons
que l'outil de base permettant d'identifier l'ordre d'un modèle ARMA est
la fonction d'autocorrélation ou d'autocorrélation partielle des
observations Xt. Cet outil est en réalité toujours valable dans
le cas d'un modèle ARMA avec le processus d'innovation GARCH. En effet,
par les propriétés des processus GARCH étudiées
précédemment, les innovations du modèle sont de moyenne
nulle et non corrélée. On en déduit facilement que le
comportement des fonctions d'autocorrélation et d'autocorrélation
partielle sont identiques aux modèles ARMA étudiés.
Cependant, les innovations GARCH imposent une modification pour
la fonction d'autocovariance ^h
·
Comme nous l'avons étudié
précédents, le test porte-manteau permet à ce niveau de
conclure si des corrélations linéaires persistent dans les
résidus et. Par la propriété de non corrélation des
processus GARCH, nous savons que ce test ne suffit pas pour conclure. En
conséquence, le développement de méthodes pour tester si
une composante GARCH est présente ou non dans le processus d'innovations
est très important. Une méthode pour identifier une telle
dépendance non linéaire des résidus consiste à
utiliser à nouveau le test portemanteau sur le carré des
résidus e2 t . La procédure pour tester s'il réside des
corrélations sur e t est alors la suivante :
- Calcul de la moyenne de e2 t :
- Calcul de la fonction d'autocorrélation empirique de e2
t :
PT ~1 /e2 t+h - ^vT ~ (e2 t -
^vT )
t=1
^PT (h) = PT t=1 (e2 t - ^vT )2
- Calcul de la statistique du test porte-manteau :
|
) =
QT (e2
t
|
XT
t=1
|
(^PT (h))2
|
Sous l'hypothèse nulle selon laquelle les e2 t sont non
corrélés, cette statistique est distribuée
asymptotiquement selon une loi x2 k
·
En cas de rejet de l'hypothèse nulle, il faudra donc
envisager d'ajuster un modèle (G) ARCH au processus des innovations.
Pour identifier quels ordres peuvent être ajustés a ce processus,
si €t est un processus GARCH (p, q), alors le €2 est un
processus ARMA (m, q), on m = max (p, q). Ceci implique que l'analyse des
autocorrélations du carré des résidus e2 t peut être
mise en uvre afin de trouver m et q, et d'en déduire p.
3.5.1 Tests d'effets ARCH/ GARCH
Comment tester la présence des effets (G) ARCH dans la
série X ou dans le résidu du modèle linéaire
autorégressif?
Deux principaux tests existent :
- Tests d'autocorrélation sur les carrés
€2 : application des statistiques usuelles du type Q - stat
(Box Pierce, Ljung Box etc..).
- Les tests contre un modèle non-linéaire
spécifique (comme les tests du LM d'absence d'auto-corrélation
sur €2 t ).
Les tests du ML
Puisque l'estimation de modèles non-linéaires
est en général plus diffi cile que celle des modèles
linéaires, il est naturel de considérer des tests qui, bien
qu'avec des alternatives non-linéaires spécifiques, ne
requièrent pas l'estimation de ces alternatives.
C'est a cette catégorie qu'appartiennent les tests du
ML. Nous disposons ainsi de trois tests de ce type, chacun testant un type de
non-linéarité : ARCH et BL.
AR(p) contre AR(p) a erreurs ARCH(p) Dans ce type de tests, on
considere un processus (Et) bruit blanc gaussien, c'est-à-dire i.i.d.
dont la loi est Ai (0, o-2). Les hypotheses sont alors
{H0 : Xt = ~ + Pp i=1 ~iXt~i + "t
q
H1 : Xt = ~ + Pp c + Pp
i=1 ~iXt~i + j=1 0.4-i
On estime le modele (Ho) par la methode de moindres carres, et
on calcule les residus (&t) obtenus. On estime alors par la methode de
moindres carres la regression
|
2
Et = c +
|
X p
j=1
|
PT t=1 v2
j^"2 t
tj + vt avec R2 = 1 ~
Et=1 lit - ~"):
|
La statistique du ML est alors asymptotiquement equivalente
à T x R2. Si l'on pose LM0 = T x R2 alors, sous
(Ho), LM0 est asymptotiquement distribuee comme un chi-deux à p degres
de libertes.
AR(p) contre BL(p, 0, P,Q) Dans ce type de tests, on considere
un processus (Et) bruit blanc gaussien, c'est-à-dire i.i.d. dont la loi
est .Af (0, cr2). Les hypotheses sont alors
~ H0 : Xt = ~ + Pp i=1 ~iXt~i + "t
H1 : Xt = 6. + Eli=1 aiXt_i + Et +
PP PQ j=1 ijXt~i"t~j
i=1
Là encore, on estime le modele (Ho) par moindre carres,
ainsi que '6-2, estimateur de o-2. La statistique du test
ML est
" XT #h i " XT #
LM1 = ^~~2 ^z1;t^"t
^M11 ~ ^M10 ^M1
00 ^M01 ^z1;t^"t ;
t=1 t=i
oil
^z0;t = (-1, Xt-1,
·
·
· , Xt--p)
^z1;t = (e.t-1Xt-1, e't-1Xt--P,
e.t-2Xt-1, et-2Xt--P, et--QXt-1, et--QXt
et
|
^Mii =
|
XT
t=i
|
zi,t
|
Zip pour i = 0, 1
|
^z1;t
^t zo,t.
XT
t=i
1C/1 -01 = 10-10
=
Il est possible de montrer que sous (H0), LA) est
asymptotiquement distribuée comme un chi-deux a P Q degrés de
libertés.
Le test RESET
On estime ici les parametres du modele linéaire
|
1/0 : Xt = +
|
X p
i=i
|
aiXt_i + Et
|
et on calcule les résidus obtenus &t, les valeurs
ajustées f(t = +
|
Ep.=i ai
|
T-
.kt_i et la somme des carrés des résidus SCR0 =
Et_i Et. On estime
|
alors, par la méthode des moindres carrés, les
parametres de
|
^"t = cto +
|
X p
i=i
|
aiXt_i +
|
h
J=1
|
bj ^Xj t+ vt,
|
v-T -2
et on calcule SCR =2_ vt . La statistique de test
est
|
RESET =
|
[SCR0_SCR1]
h-1
|
|
SCRi/ (T h)
|
qui suit sous (H0) (hypothese de modele AR (p)) un loi de Fisher
F (h-1, T-p-h).
Test de McLeod
Le test de McLeod qui est semblable au test de Ljung-Box
a la différence que ce sont les résidus au
carré qui sont évalués :
|
Q (p) = T (T + 2)
|
X p
i=i
|
PZ (h)
|
|
|
T -- i :
|
3.5.2 La selection d'un modele
Dans la mesure on l'on compare des modeles dits
emboités (ARCH (1), ARCH (2), GARCH (2, 1), . . . ), c'est-a-dire dans
la mesure on un modele peut s'exprimer comme une forme restreinte d'un autre
modele, la
sélection du modèle et le choix de l'ordre peut se
faire par le test ratio de vraisemblance "log-likelihood ratio test" :
LR = --2 (log £R- log £U)
avec log £R est la log-vraisemblance du modèle
restreint et log LU est la log vraisemblance du modèle non-restreint. LR
suit (asymptotiquement) une loi du chi-deux avec un nombre de degré de
liberté égal au nombre de restrictions.
Exemple 3.5.1 Soient les modêles emboItés suivants
:
Yt = ~ 0 + "t
avec
q q
"t = t c + i"2t_i ou t = t c +
1"2t_ + 1h2t_1.
On dit que le modêle ARCH (1) est une forme restreinte du
modêle GARCH (1, 1) avec comme restriction 1 = 0.
Chapitre 4
Extension du modèles (G)
ARCH
Un problème se pose quand on estime les
paramètres des modèles (C) ARCH pour un ordre plus
élevée : les coefficients estimées violer la contrainte de
non négativité de la variance. Pour éviter ce
problème, John Geweke [1986] a suggère d'utiliser une approche
multiplicatif de la variance conditionnelle :
h t = exp (c) :"21
t1:"22
t2: : : : E2~p
tp.
Cette expression est toujours positive, indépendamment
du fait que les paramètres soient positifs ou négatives. En
prenant les logarithmes, on obtient
ln (h2 ) + 2 ln ("2 )
) = c + 1 ln (€2 ) + ~ ~ ~ + çbp ln
(€2
t t.1 t2 tp
Tout les modèles examinées jusqu'a ici
présentent l'inconvénient que les chocs positifs est
négatifs exercent le même impacte sur la variance conditionnelle
et ces signes est disparus. D'autre part, il est bien connu que la
réaction de la volatilité du cours des actions est
différente si les chocs sont négatifs, c'est-à-dire elle
produise de mauvaise nouvelle.
4.1 Modèles asymétriques
La seconde grande approche couvre les modèles ARCH non
linéaires et plus particulièrement la prise en compte des
phénomènes asymétries. L'idée est toute simple :
l'effet hétéroscédastique n'est sans doute pas le
même suivant que l'erreur précédente est positive ou
négative. Deux grandes classes de modèles ont été
proposées :
4.1. MODELES ASYMETPJQUES
- Nelson [1990] s'est intéressé aux
évolutions asymétriques de la variance à l'aide des
modèles EGARCH.
- Engle et Bollerslev [1986] ont étudié les
modèles ARCH à seuils (TARCH) on la variance est une fonction
linéaire définie par morceaux qui permet différentes
fonctions de volatilité selon le signe et la valeur des chocs.
Rabemananjara et Zakoian [1991] ont proposé une
généralisation avec les modèles les modèles
TGARCH.
4.1.1 Modèle EGARCH
Dans le cas du modèle GARCH, les résidus sont au
carré avant les estimer. Mais, il est possible que les mouvements en
baisse et les mouvements en hausse donnent des effets différents sur la
prédiction de la volatilité. Nelson est le premier
enquêteur du modèle de l'effet levier (c'est-à-dire les
mouvements en baisse ont plus d'infiuences que les mouvements en hausse).
Definition 4.1.1 Un processus € satisfait une
représentation EGARCH (p, q) si et seulement si :
{ "t = ~ ht q j"t_ij
log h2 t = c + Pq i=1 i log h2 t_i + Pp i=1 ~i t_i + Pp q "t_i
i=1 ~i
h2 h2
t_i
oh le résidu normalisé ij est un bruit faible.
En utilisant le modèle EGARCH, Black trouve que la
volatilité sur le marché boursier a tendance à augmente
après les rentabilités négatives et a tendance à
baisser après les rentabilités positives. Le modèle EGARCH
exploite cette régularité empirique en mettant la variance
conditionnelle en fonction de la taille et le signe de résidus
retardés. Etant différent par rapport au modèle GARCH (p,
q).
Remarque
Le modêle EGARCH ne fait aucune hypothése sur les
paramétres q et pour assurer la non négativité de la
variance conditionnelle.
Les coefficients i tel que i = 1, 2,..., p, est
typiquement négatif, donc un choc positif des rentabilités
entraine une volatilité moins élevée qu'un choc
négatif. Le modèle EGARCH donne des différences par
rapport au modèle GARCH :
- Premièrement, les bonnes et les mauvaises nouvelles
ont des impacts différents sur la volatilité dans le
modèle EGARCH mais elles ont des mêmes impacts dans le
modèle GARCH.
- Deuxièmement, les nouvelles importantes ont des
impacts plus importants dans le modèle EGARCH que dans le modèle
GARCH standard.
4.1.2 Modèles TGARCH
Une autre façon de modéliser les
asymétries consiste a retenir des modélisations a seuils dans la
lignée des modèles TAR. Le modèle TGARCH (Zakoian, [1994])
est défini de la façon suivante.
Définition 4.1.2 Un processus €t satisfait une
représentation TGARCH (p, q) si et seulement si :
~
"t = t ht
h2t = c + Pp i=1
~+ i E+ t - ~~ i E~ t + Pq j=1 jh2 tj
oh le résidu normalisé ij est un bruit faible,
avec, c > 0, ~+ i ~ 0, q~ i ~ 0 et j ~ 0.
4.2 Le modèle (G)ARCH en finance
4.2.1 Les principales propriétés des
séries financières
Les séries de prix d'actif et de rendements
présentent généralement un certain nombre de
propriétés similaires suivant leur périodicité.
Soit Pt le prix d'un actif a la date t et Tt le logarithme du rendement
correspondant :
Tt = log (Pt) - log (Pt-i) = log (1 + Rt)
on
Rt = (Pt -- pt-i) /pt-i
désigne la variation relative des prix. Les
séries de prix d'actif et de rendements sont d'ailleurs sans
unité, ce qui pour facilite la comparaison entre elles.
Charpentier (2002) distingue ainsi 8 principales
propriétés que nous allons successivement aborder.
Propriété 4.1 (Stationnarité) Les
processus stochastiques Pt associés aux prix d'actif sont
généralement non stationnaires au sens de la stationnarité
du second ordre, tandis que les processus associés aux rendements sont
compatibles avec la propriété de stationnarité au second
ordre.
Autrement dit, les trajectoires de prix sont
généralement proche de marche aléatoire sans terme
constante. Et, en revanche, les séries des rendements ont des
trajectoires compatibles avec la stationnarité au second ordre.
Propriété 4.2 (Autocorrélations des
carrés des variations de prix) La série (r2 t )
associée aux carrés des rendements présente
généralement de fortes auto-corrélations . Ce qui n'est
pas compatible avec une hypothése de bruit blanc. Néanomois, les
auto-corrélation de la série (rt) sont sou-vent trés
faibles . La série (rt) la rendent proche d'un bruit
blanc1.
Propriété 4.3 (Queues de distribution
épaisses) L'hypothése de normalité des rendements est
généralement rejetée. Les queues des distributions
empiriques des rendements sont généralement plus épaisses
que celles d'une loi gaussienne. On parle alors de distribution
leptokurtique.
Propriété 4.4 (Clusters de Volatilité) On
observe empiriquement que de fortes variations des rendements sont
généralement suivies de fortes variations. On assiste ainsi a un
regroupement des extrêmes en cluster ou paquets de volatilités.
Propriété 4.5 (Queues épaisses
conditionnelles) Même une fois corrigée de la volatilité
clustering (par exemple avec des modéles GARCH), la distribution des
résidus demeure leptokurtique même si la kurtosis est plus faible
que dans le cas non conditionnelle.
Propriété 4.6 (Effet de levier) Il existe une
asymétrie entre l'effet des valeurs passées négatives et
l'effet des valeurs passées positives sur la volatité des cours
ou de rendements. Les baisses de cours tendent a engendrer une augmentation de
la volatilité supérieure a celle induite par une hausse des cours
de même ampleur.
Propriété 4.7 (Saisonnalité) Les returns
présentent de nombreux phénoménes de saisonnalité
(effets week end, effet janvie etc..).
Toutefois, certaines saisonnalité peuvent être
spécifiques a un échantillon, une période.. Il est, par
contre, deux types de saisonnalité qui ont acquis droit de cité
dans la littérature, pour avoir été discernés sur
des échantillons, des périodes et au moyen de
méthodologies présentant suffisamment de variété
pour en étayer la robustesse. Il s'agit de "l'effet janvier" et de
"l'effet week-end".
Propriété 4.8 (Asymétrie perte/gain) La
distribution des cours est généralement asymétrique : il y
a plus de mouvements forts a la baisse qu'a
1L'hypothése usuelle en théorie de la
finance consistait effi ctivement a supposer que les processus de rendements
sont i.i.d et de variance finie. Un hypothése plus forte est aussi
souvent faite sur le caractère gaussien de ces rendements.
la hausse.
4.2.2 La VaR
La VaR (de l'anglais value at risk, mot à mot: <<
valeur sous risque >> ) est une notion utilisée
généralement pour mesurer le risque de marché d'un
portefeuille d'instruments financiers. La notion de VaR est apparue pour la
première fois dans le secteur de l'assurance. A la fin des années
[1980], la banque Bankers Trust fut l'une des premières institutions
à utiliser cette notion sur les marchés financiers aux
Etats-Unis, mais c'est principalement la banque JP Morgan qui dans les
années 90 a popularisée ce concept notamment grace à son
système RiskMetric.
De façon générale, la VaR est
définie comme la perte maximale potentielle qui ne devrait être
atteinte qu'avec une probabilité donnée sur un horizon temporel
donné (Engle etManganelli, [2001]). La VaR est donc la pire perte
attendue sur un horizon de temps donné pour un niveau de confiance
donné. La VaR répond à l'affi rmation suivante : <<
Nous sommes certains, à a%, que nous n'allons pas perdre plus de V euros
sur les N prochains jours >> . V correspond à la VaR, a% au seuil
de confiance et N à l'horizon temporel.
Supposons que la distribution des pertes et profits
associée à la détention d'un actif sur une période
corresponde à une distribution normale standard. Sur la Figure 4.3 est
reproduite cette distribution de perte et profit supposée normale : sur
la partie gauche de l'axe des abscisses figurent les rendements négatifs
(pertes) tandis qu'à droite figure les rendements positifs (profits).
Dans ce cas, la VaR définie pour un niveau de confiance de 1 - a, donc
il y a 1 - a de chances que le rendement de l'actif, noté rt, soit au
moins égal à F ~1 (a) sur la période de
détention.
Pr [rt < V aR(a)] = Pr [rt < F ~1 (a)] = a
car V aR(a) = F ~1 (a) on F (.) désigne la
fonction derépartition associée à la distribution de perte
et profit.
Exemple 4.2.1 La VaR au seuil de confiance de 95% a 1 jour,
que l'on notera, VaR (95%, 1j), égale a 1 million d'euros signifie qu'un
jour sur cent en moyenne, le portefeuille est susceptible d'enregistrer une
perte supérieure a cette somme de 1 million d'euros. En
considérant que les variations de valeur d'un portefeuille sont
normales, la VaR peut être exprimé graphique-
ment,
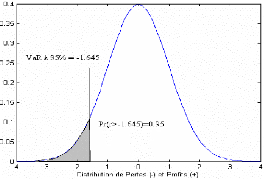
Figure 4.1 : Exemple de VaR sous distribution
normale.
Dans l'exemple ci-dessus, la VaR (95%, 1j) correspond
approximativement a une perte de 1.65 millions d'euros et la VaR (99%, 1j)
correspond a peu prés a une perte de 2.33 million d'euros.
Ainsi, la VaR correspond généralement a une
perte (valeur négative). Toutefois, on trouve souvent une Value-at-Risk
définie non pas a partir de la distribution de perte (-) et profit (+),
mais a partir au contraire d'une distribution de profit(-) et perte(+). Dit
autrement, une telle définition revient a omettre le signe moins devant
la perte et donc a affi cher une VaR positive. Dans ce cas, la
définition de la VaR correspond a l'opposé du fractile de la
distribution de perte et profit :
V aR(a) = --F ~1 (a).
Chapitre 5
Application sur des données
réelles
Nous avons présenté une application pratique sur
des données réelles extraie d'un indice boursier et nous allons
voir l'effet ARCH sur ce dernier. Et ensuite, nous pouvons appliquer la
modélisation ARCH sur les données de cet indice.
Présentation de la série et analyse
préliminaire
Les données sont des observations journalières
de rendement sur l'indice boursier NASDAQ. Leur nombre est de 2261
observations. La période couverte s'étant de 2 janvier 2000 a
décembre 2007
Logiciel utilisé
EViews (Vues économétriques) est un logiciel de
statistiques, utilisé principalement pour les séries
chronologiques orienté analyse économétrique. Elle est
développée par Quantitative Micro Software (SMQ), fait maintenant
partie de l'IHS .La version 1.0 a été publié en Mars 1994,
et remplacé MicroTSP. La version actuelle de EViews est de 7,1,
publié en avril 2010.
1) L'examen du graphe :
La première étape d'une série chronologique
est la représentation graphique. Le graphe correspondant a cette
série est le suivant :
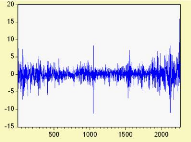
figue 5.1. : La s~erie de redement.
L'analyse visuelle du graphe montre a première vue
l'absance d'une tendance. D'oñ il y a lieu d'afiirmer une
présomption du stationnarité de la série.
2) L examen du corrélogramme de la série
On obtient le correlograme simple et partiel calculée de
cette série :

Figure 5.2 : Le correlogramme
simple et partiel.
Il faut s'intéresser au corrélogramme afin de
procéder a l'identification des modèles.
L'autocorrélogramme simple (caractéristique des
processus moyennes mobiles ), dans ce cas on obtenue l'ordre 2 de le processus
MA. D'autre part, l'autocorrélogramme partiel (caractéristique
des processus autorégressifs )
on a l'ordre 2 de le processus AR. Un troisième
processus a analyser est celui qui combine les deux précédents
processus (MA (2) et AR (2)) noté ARMA (2,2).
3. Validation du modèle ou les tests:
- - Le test de normalité :
|
|
|
Figure 5.3 : Le test de normalit~e.
|
La valeur de test de Jarque-Bera (2944,783) est
supérieure a 5.99 (la valeur de X2(2)), ce qui amène a
l'absance de la normalité qui est également visible sur
l'histogramme ci-dessus. Donc la série des résidus n'est pas un
bruit blanc gaussien. Ainsi, la valeur de la kurtosis (8,59) assure cette
resultat et aussi montre que la distribution de cette série est
leptokurtique (supérieure a 3). En plus, on observe que la valeur de la
skewness est égale a 0.0077 cela montre que la distribution est
asymétrique et a une queue allogée vers la droite. On retrouve la
propriété d'asymétrie aux gains.
- Corrélogramme simple et partiel des résidus
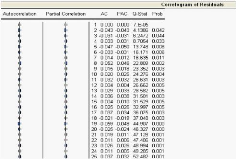
Figure 5.4 : Le corr~elogramme simple et
partiel
des r~esidus.
On observe L'absence d'autocorrélation les résidus
ou des rendements. Pour cette raison on va analyser les carrés des
résidus.
- Corrélogramme simple et partiel des résidus au
carrés
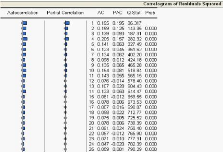
Figure 5.5 : Le corr~elogramme simple et
partiel
des r~esidus au carr~es.
A partir du corrélogramme, on remarque plusieurs termes
significativement différents de zéro cela veut dire qu'il existe
une autocorrélation et aussi il y a certainement un effet ARCH. Pour
cela on est passé au test d'homoscédasticité dont le
résultat ci-dessous.
- Le test ARCH d'hétéroscédasticité
:
La détection de
l'hétéroscédasticité par le processus ARCH se fait
avec comme hypothese :
~

H0 : il y a homoscédasticité H1 : il y a
hétéroscédasticité

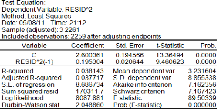
Figure 5.6 : Le test ARCH.
On a la statistique du ML (T * R2) = 86, 165 qui
est supérieure a 5,99, on rejette l'hypothèse nulle
d'homoscédasticité en faveur de l'hypothèse alternative
d'hétéroscedasticité conditionnelle.
- Identification du modèle de type ARCH
On a eu plusieurs modèles ARCH avec des ordres p assez
grands. Par conséquent on est passé au modèle GARCH (1,
1).
Les résultats obtenus dans la table ci-dessous montrent
que les paramètres de l'équation de la variance conditionnelle
sont significativement différents de zéro.
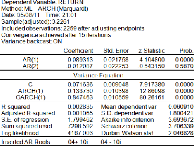
Figure 5.7 : Estimations des
param~etres.
Le modèle retenu est un modèle AR (1) avec erreur
GARCH (1, 1)
s'écrit sous la forme suivante :
X = 0:0893 Xt_i + €7 avec "t = ~tht on l'équation de
la variance est
h t = 0:0716 + 0:1953"2 t_ + 0:8473h2 t_1.
- Graphique des séries résiduelles réelles
et estimées
Le graphe de la valeur actuelle (actuel), prédite dans
l'échantillon (fitted) et du résidus (résiduel).
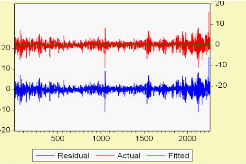
Figure 5.8 : Le graphe des valeurs
actuelle,
pr~edites dans l'~echantillon et du
r~esidus.
L'observation du graphique montre bel et bien que les
variables de la valeur actuelle sont collées avec celle de la variable
projetée (fitted value) et que le résidu se comporte maintenant
comme un bruit blanc.
Chapitre 6
Conclusion
Le but de ce document a été de mettre en
évidence l'utilité des modèles non linéaires et
l'hétéroscédasticité conditionnelle qui
posséde, maintenant, des outils puissants d'analyse et de
modélisation fondés sur des bases théoriques solides pour
modéliser des séries chronologiques stationnaires
présentant une dynamique non linéaire. Le concept de variance
conditionnelle a commencé a jouer un grand role au début des
années quatre vingt avec l'article fondateur de Engle (1982). Il
caractérise les modèles venus élargir la classe des
modèles classiques fondés essentiellement sur une structure de
dépendance linéaire entre une variable a un instant t et ses
valeurs passées et celles d'un bruit blanc et de ses valeurs
passées.
Les modèles ARCH permettent de prendre en compte des
faits stylisés inhérents a la volatilité comme, par
exemple, un excès d'aplatissement, de faibles autocorrélations
des rentabilités journalières des actifs
considérés, et des autocorrélations positives et
significatives pour le carré de ces rentabilités (i.e :
non-stationnarité des variations de volatilité.
Avec l'existence de la volatilité, plusieurs chercheurs
essayent d'étudier la raison de la volatilité du marché.
La raison de volatilité n'est pas seulement les informations existantes
sur le marché mais aussi les comportements des investisseurs, les bulles
spéculatives et plusieurs autres facteurs. Avec ses influences, la
volatilité fait stabiliser les marchés financiers et fait
stabiliser aussi l'économie mondiale.
Les modèles ARCH et GARCH ont l'avantage de permettre
de modéliser avec assez peu de paramètres des séries
temporelles complexes et sont pour cette raison très utilisés
pour certaines séries financières, en particulier pour
prédire la volatilité. Il est cependant de plus en plus admis que
la prise en compte de non-stationarités dans les séries
financières est inévitable pour mettre en pratique ce type de
modèles sur des données réelles
de longue durée.
Ces modèles ou des modèles qui s'en inspirent
sont aussi employés dans d'autres contextes pour capturer d'autres
propriétés des données. Ainsi, comme l'incertitude sur les
rendements des actifs varie dans le temps avec la conjoncture, les
événements politiques,. . . la décision de détenir
de tels actifs de la part d'agents risquophobes doit être affectée
par ces variations d'incertitude. Ces propriétés doivent se
retrouver dans leurs rendements/prix. Lorsque l'incertitude est grande, l'agent
demande une compensation pour le risque qu'il porte, il demande une prime de
risque. Une famille de modèle inspirée des modèles ARCH
tente de capturer les effets de cette incertitude sur les rendements d'actifs :
ce sont les modèles ARCH-M.
Cependant, les modèles ARCH posent problème
lorsque le nombre de données historiques devient extrêmement grand
auquel cas les variances conditionnelles ont tendance a devenir
négatives. En effet, le problème des modèles ARCH vient du
fait que la volatilité est prédite par les carrés des
innovations. Or, les rentabilités des actifs et la volatilité de
ces actifs tendent a être négativement corrélées,
phénomène que les modèles ARCH ne peuvent incorporer car
ils restreignent la volatilité a être seulement affectée
par les changements d'amplitude des innovations. En effet, le modèle
EGARCH, tente de remédier a cet inconvènient, mais sa formulation
reste complexe.
En plus, tous les modèles GARCH étudiés
prennent la prime du risque des rendements des actifs sous-jacents comme
constante. Cette hypothèse est critiquée dans l'article de
Christoffersen-Jacobs (2004). Ces deux auteurs posent le problème de
spécifier cette variable différemment. Dans cet essaie, on
propose de la considérer comme une variable qui bouge dans le temps, en
la modélisant par un processus GARCH.
Bibliographie
[1] Alami Ali et Renault Eric, <<Risque de modèle
de volatilité>> , Février 2001, p 7-9.
[2] Charpentier Arthur, <<Cours de séries
temporelles --Théorie et application-->>, volume 2, 2002, p
42-60.
[3] J.J. Daudin, C. Duby, S. Robin et P. Tr'ecourt,
<<Analyse de S'eries Chronologiques>> , Mai 1996, p 26-38.
[4] Hurlin Christophe, <<Modèles
ARCH-GARCH--application a la VaR>> , 2007, p 1-66.
[5] Ioana Teodora Mester, <<The volatility of
the financial maeket--A quantitative approache-->> , p 895-898.
[6] Gouriéroux Christian, Joanna Jasiak,
<<Non-linear innovations and impulse response>>, 3 juillet 1999, p
1-2.
[7] Kirchgassner et Jurgen Wolters, <<Intoduction to
modern times series>>, avril 2007, p 241-261.
[8] Van Sacls Rainer et Van Bellegen, <<Séries
chronologiques>> , 26 september 2005, 4eédition, p
107-129.
[9] Wurtz Diethelm, Chalabi Yohan et Luksan Ladislav,
<<Parameter estimation of ARMA model with GARCH/APARCH errors--An R and
Splus software-->>, journal of statistical software, volume vv, p
4-12.
| 

