|
UNIVERSITE DE M'SILA
FACULTE DES SCIENCES ET DES
SCIENCES DE L'INGENIORAT
Département de génie
mécanique
MEMOIRE
Présenté pour l'obtention du diplôme de
Magistère
Spécialité : Génie
mécanique
Option : Construction mécanique
Par
Gueraïcfie Larbi
SUJET

MISE AU POINT DU DISPOSITIF À BARRE DE
PRESSION
D'HOPKINSON DIVISEE (BPHD)
Soutenu publiquement le: 13/01/2008 devant le jury composé
de :
N. BOUAOUADJA Pr. Université de Sétif
Président
H. OSMANI Pr. Université de Sétif Rapporteur
N. BOUZIT Pr. Université de Sétif Co-Encadreur
Y. BENARIOUA Pr. Université de M'sila Examinateur
N.LAOUAR MC. Université de Sétif Examinateur
Dr. C. FARSI MACC. Université de M'sila Examinateur
AVANT PROPOS
Louange au seigneur unique; le clément et le
miséricordieux que grâce à lui en primauté que ce
travail a pu sortir à la lumière.
Ce travail a été réalisé au
laboratoire des matériaux non métalliques (LMNM) au
département d'optique et mécanique de précision. Je tiens
ainsi à remercier Demagh NACERDINE et Bouaouadja NOUREDDINE,
respectivement chef du département d'O.M.P et directeur de LMNM, pour
leur accueil et la confiance qu'ils m'ont accordée.
Ce travail doit énormément à monsieur
Hocine OSMANI, professeur de l'université Ferhat Abbas de Sétif
en optique et mécanique de précision, à lui que j'exprime
ma profonde gratitude de m'avoir accueilli à LMNM. Je le remercie aussi
pour sa participation au financement de ce sujet, sa disponibilité, ses
conseils précieux et constants, sa confiance et ses encouragements.
J'exprime ma particulière reconnaissance à
monsieur Bouzit NACERDINE, maître des conférences au
département de l'électronique pour sa disponibilité et
pour le matériel mis sous ma responsabilité au sein de son
laboratoire d'instrumentation pendant la réalisation de la carte
d'interface et de l'acquisition des signaux.
Je remercie également monsieur Ramzi OTHMAN,
maître des conférences à l'école centrale de Nantes
pour les nombreuses discussions en ligne, surtout ceux qui concernent le choix
du matériau des barres.
Je tiens à signaler la collaboration intime de monsieur
Mostfaï, directeur générale de l'unité moule le long
de la réalisation du dispositif en question, à lui que j'exprime
ma profonde reconnaissance. Je n'oublie pas à adresser un salut
particulier aux opérateurs de son unité pour leur assistance
technique.
Je suis très reconnaissant aux enseignants Saï
AHMED, Felkaoui AHMED, Manallah FAYCAL, Faria KOUIDAR et Bouzid SAÏD pour
leurs précieuses directives.
Je remercie Monsieur Bouaouadja NOUREDDINE, d'avoir
accepté de présider le jury d'examen. Je remercie
également messieurs Younes BENARIOUA, Naâmane LAOUAR et Farsi
CHAOUKI d'avoir bien voulu examiner mon travail.
J'adresse mes sincères remerciements à Monsieur
Hacène BAHRI, technicien de LMNM pour sa disponibilité,
serviabilité et gentillesse. Le staff de l'atelier de génie
mécanique de M'sila: ELMAKKI, MOHAMMED et MOURAD, trouve aussi
l'expression de ma profonde gratitude.
Je tiens à remercier mes copains de chambre à la
résidence d'Elbaz-Sétif: ISHAK, MOHAMMED, AYOUB, BILAL, HICHEM et
BOUBAKAR, avec lesquels j'ai partagé d'agréables moments pendant
mon stage à LMNM.
Je suis très reconnaissant à Saadi FOUAD pour le
bon accueil et soutien lors de la rédaction finale du mémoire.
Gueraiche HAMID trouve l'expression de ma profonde gratitude pour
sa serviabilité, disponibilité et soutien constant.
Que dieu bénit les frères WALID, OTHMANE, SAID,
RACHID, NASSIM, ISSAM, ABD ELATIF et ZIDANE pour leur aide précieuse.
Je n'oublie pas à remercier le staff des enseignants
qui m'ont assuré la formation de la poste graduation. Je tiens aussi
à exprimer ma profonde gratitude à monsieur ZAOUI, chef de
département de génie mécanique à
l'université de M'sila pour son aide précieuse.
J'adresse mes amitiés à mes collègues de
poste graduation surtout à Meddah MUSTAPHA, Belhocine ABD ELGHANI,
Hamrit FARAH et Rabah BOUBAAYA.
Enfin, j'exprime mes sincères remerciements à tous
ceux qui ont participé de près ou de loin à la
réalisation de ce travail.
A tout unificateur dans le monde ;
A mes chers parents que je dois toute ma gratitude
;
A mes frères Lâalmi, amar et
Said
A mes soeurs ;
A la famille GUERAICHE ;
A mes collègues de poste graduation
;
A tous ceux qui me sont chers en dieu
;
TABLE DES MATIERES
INTRODUCTION GENERALE
CHAPITRE I: EVOLUTION DE LA TECHNIQUE DE LA
BARRE
D'HOPKINSON
I.1 Introduction 1
I.2 Histoire de développement de la barre d'HOPKINSON 1
I.3 Récents secteurs de recherche 4
CHAPITRE II: THEORIE DE LA BARRE DE PRESSION DE
HOPKINSON
DIVISEE (BPHD)
II.1 Introduction 5
II.2 Equation différentielle fondamentale de la
propagation d'onde 5
II.3 Résolution de l'équation de propagation de
l'onde de contrainte 7
II.4 Développement des équations régissant
le spécimen 8
II.5 Approches de validité de l'essai BPHD 11
II.6 Conception des spécimens pour l'essai BPHD 14
II.6.1 Effets d'inertie et de frottement 14
II.6.2 Equilibre de contrainte, contrainte uniaxiale et formation
d'impulsion 15
II.6.3 Autres considérations 16
II.6.3.1 Considérations spéciales pour les
matériaux doux 16
CHAPITRE III: ANALYSE SPECTRALE DE L'ONDE
III.1 Introduction 19
III.1.1 Transformée de Fourier et la FFT 19
III.1.2 Propagation d'onde dans le domaine de fréquence
24
III.1.3 Equations d'onde 26
III.2 Méthodes de correction de la dispersion et de
l'atténuation 27
III.2.1 Méthodes analytiques 27
III.2.2 Méthodes expérimentales 29
III.2.2.1 Théorie derrière la méthode
expérimentale 29
III.2.2.2 Détermination expérimentale du
coefficient de propagation 31
III.3 Conclusion 33
CHAPITRE IV: CONCEPTION ET REALISATION DU
DISPOSITIF
IV. 1 Méthode de conception du dispositif 34
V. 1.1 Fonction totale 34
IV. 1.2 Fonctions partielles 34
IV.1.3 Cahier des charges 34
IV.I.4 Variantes proposées 35
IV.I.5 Evaluation et décision 37
IV.I.5.1 Choix des barres 37
IV.I.5.2 Propulsion du projectile 39
IV.I.5.2. 1 Système de déclenchement 39
IV.I. 5.3 Instrumentation associée à BPHD et
acquisition des données 38
IV.I.5.4 Calcul de la vitesse d'impact 45
IV.I.6 Schéma technique du dispositif 45
IV.I.7 Principe de fonctionnement 46
IV.2 Résultats 47
IV.2. 1 Commande de l'électrovanne et de la pompe à
vide sous VC++ 49
IV.2. 1.1 Compatibilité avec XP 49
IV.2.1 Analyse des données 53
CONCLUSION ET PERSPECTIVES
REFERENCES BIBLIOGRAPHIQUES
ANNEXE A
ANNEXE B
INTRODUCTION GENERALE
La conception des structures est basée presque
seulement sur des données matérielles sous forme de tableaux,
habituellement sous forme de courbes contrainte- déformation recueillies
en déformant le spécimen très lentement. Les conceptions
optimales exigent des tables précises et complètes pour les
matériaux examinés sous une variété de
conditions.
Ce sujet s'inscrit dans le cadre de la continuité des
travaux entamés en ingéniorat sur les barres d'Hopkinson pour
l'extension des essais, de caractérisation mécanique à
LMNM, aux vitesses de déformation élevées allant de
102 à 104 S-1. Le but de ce travail
n'est pas d'examiner des matériaux aux taux élevés de
déformation. Plutôt, c'est de mettre au point un dispositif
d'essai de compression à barre de pression d'Hopkinson divisée
(BPHD) assisté par PC qui satisfait ce besoin.
Le premier chapitre est inclus comme une carte chronologique
du développement de l'appareil à barres d'Hopkinson. Une approche
ligne de temps est prise pour récapituler les avancements principaux
menant à l'arrangement actuel de l'appareil en question. On
décrit l'histoire d'évolution de la technique des barres de
Hopkinson ainsi que les récents secteurs de recherche.
Le deuxième chapitre est dédié à
l'analyse conventionnelle de la technique à barre de pression
d'Hopkinson divisée. Ainsi, On rapporte la résolution de
l'équation de l'onde de contrainte uniaxiale et les équations
régissant le spécimen tout en satisfaisant les approches de
validité de la technique. Les exigences sur la conception des
spécimens et quelques considérations spéciales pour les
matériaux doux sont aussi étudiées.
L'analyse spectrale de l'onde pour corriger la dispersion et
l'atténuation fait l'objet du troisième chapitre.
Le quatrième chapitre est consacré à la
conception et la réalisation du dispositif (BPHD), l'instrumentation
associée, la commande par PC et au traitement informatique des
données de l'essai à barre de pression d'Hopkinson
divisée.
CHAPITRE I
EVOLUTION DE LA TECHNIQUE DE LA
BARRE
D'HOPKINSON
I.1 Introduction
La technique de la barre d'HOPKINSON est largement
utilisée pour la détermination des propriétés
mécaniques des matériaux à des taux de déformation
élevés. Typiquement dans l'intervalle
102-104 s-1.
Le présent chapitre est inclus comme une carte
chronologique du développement de l'appareil à barre de
Hopkinson. Une approche ligne de temps est prise pour récapituler les
avancements principaux menant à l'arrangement actuel de l'appareil en
question, commençant par son fondateur. L'auteur a essayé de
glaner les avancements les plus significatifs de divers investigateurs et de
les rapporter ci-dessous. La dernière partie du chapitre est
dédiée aux récents axes de recherche relatifs au fameux
appareil SHPB.
I.2 Histoire de développement de la barre
d'HOPKINSON :
Les premiers essais d'impact utilisant une barre longue en acier
ont été réalisés par John Hopkinson en 1872. Le
schéma de son dispositif est montré sur la figure I.1 [2].
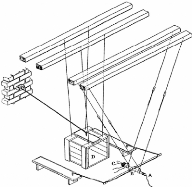
Figure I.1 : Schéma de la première barre de
pression
Il a essayé de déterminer la réponse
dynamique des fils de fer en transférant l'énergie d'un poids
tombant dans un fil et en mesurant combien il a été
déformé avant la rupture. Il a utilisé une barre (B)
suspendue par deux ensembles de fils et alignée avec une boîte (D)
également suspendue. La section de la tige courte (C) est placée
à l'extrémité de la barre principale et tenue en place par
une petite force magnétique. Une balle est alors tirée sur
l'extrémité (A) de la longue barre en lui communiquant une onde
de pression. L'onde parcourt
la tige. Une fois arrivée à la tige courte, elle
l'éjecte dans la boite. Les déplacements de la boîte et de
la tige sont mesurés avec un dispositif simple de déplacement.
Les appareils de mesure disponibles à l'époque ont limité
l'exactitude des résultats des expériences. Seule
l'énergie totale transmise à la barre impactée pouvait
être mesurée.
En 1914, Bertram Hopkinson a continué le travail de son
père. Il a introduit sa barre de pression représentée sur
la figure I.2 [3]. L'application initiale de cet appareil de mesure
était principalement pour étudier des pressions pendant des
événements fortement dynamiques tels que la détonation
explosive ou l'impact des balles.
Essentiellement, la barre de pression de Hopkinson utilise la
propagation des ondes élastiques de contrainte pour prévoir des
contraintes et des déformations dans un échantillon. Hopkinson a
découvert que les déplacements dans la barre sont directement
liés aux contraintes et la longueur de l'onde de contrainte est
liée à la durée de l'impact par l'intermédiaire de
la vitesse du son dans la barre de pression
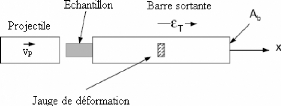
Figure I.2: Barre de pression développée par
Hopkinson (1914) avec une seule barre et un
projectile
En 1948, DAVIES [4] montre qu'il est possible de mesurer la forme
temporelle de l'onde engendrée dans une barre instrumentée et
soumise à l'impact d'un projectile.
Le montage SHPB (Split HOPKINSON Pressure Bar) est introduit
par KOLSKY [5] en 1949. C'est la raison pour laquelle le terme « barre
d'HOPKINSON » est remplacé par le terme « barres de KOLSKY
» dans de nombreux ouvrages.
Kolsky a modifié la barre de pression d'Hopkinson comme
représentée sur la figure I.3. Il a utilisé cet appareil
expérimental de SHPB pour caractériser l'écoulement de
déformation des matériaux non fragiles sous un chargement
dynamique. Typiquement, le SHPB offre des possibilités d'essai de
matériaux aux taux de déformation de l'ordre de 102
à 104 s -1. Kolsky a découvert que la
contrainte et la déformation dans un échantillon peuvent
être directement liées aux déplacements
des barres incidente et transmise. Contrairement à la barre de pression
de Hopkinson, le projectile dans l'appareil SHPB ne percute pas le
spécimen directement. Plutôt, c'est la barre incidente qui
reçoit l'impact du projectile. Il s'y propage donc une onde de
contrainte, d'autant plus intense que la vitesse d'impact est
élevée et qui dure d'autant plus longtemps que le projectile est
long. Cette onde se réfléchie partiellement sur
l'échantillon, une partie le traverse et se transmet dans la barre
transmise.
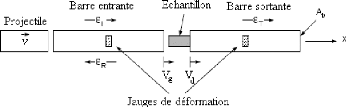
Figure I.3: SHPB adaptée par Kolsky (1949) avec une barre
incidente, barre transmise, et un projectile
Un projectile qui frappe l'extrémité de la barre
entrante avec une vitesse y crée une onde de contrainte [51,52]:
Où pb et cb sont respectivement la
densité de la barre entrante et la vitesse de propagation des ondes
longitudinales élastiques dans la barre entrante. Le terme
pbcb représente l'impédance acoustique qui est une
caractéristique intrinsèque du matériau.
Dans le projectile se réfléchie une onde de
décharge. Quand elle atteint l'extrémité opposée
à la face d'impact, le projectile se décolle de la barre. La
durée de l'onde envoyée dans la barre entrante est donc le double
du temps de parcours des ondes élastiques dans le projectile. Pour un
projectile de longueur L dont la vitesse des ondes élastique est c , la
durée de l'onde est donnée par [51] :
T = 2L/c (I.2)
Depuis 1970, les améliorations les plus significatives
à l'expérience de la barre de Hopkinson et ses
dérivés sont venues sous forme de très rapides
systèmes d'acquisition des données par ordinateur (NI PXI-4220,
NI SCXI, NI 9237, NI SCXI-1521, NI SCXI-
1521B,. .etc.) [54]. Des oscilloscopes digitaux à
mémoire à entrées différentielles (Nicolet Pro30,
Yokogawa, Tektronix TDS-744A,. .etc.) et des conditionneurs de signal à
large bande passante ont permis aux scientifiques d'obtenir des données
à résolution élevée et précision meilleure
(Kyowa CDV700A, . .etc.) [2, 22]. D'habitude, les chercheurs utilisent des
oscilloscopes à mémoire numériques à large bande
(>500 MHz).De plus, des recherches ont été faites sur les
caractéristiques de la barre de pression, les effets de la
géométrie de l'échantillon et la modélisation
mathématique.
D'autres modifications à l'appareil d'Hopkinson
original ont été faites pour tester les matériaux sous
tension, torsion, cisaillement, flexion trois ou quatre points, indentation
dynamique et aussi sous combinaison de conditions de chargement [6, 7, 8, 9]
En outre, certains auteurs s'y penchaient aux secteurs de
traitement des données, soucis expérimentaux et utilisation de
différents capteurs pour acquérir les données des barres:
des accéléromètres, des jauges extensométriques ou
semi-conductrices, des capteurs optiques ou d'autres dispositifs permettant de
mesurer le déplacement de la barre. Des chaînes d'acquisition ont
été assistées par ordinateur.
De nombreux programmes de traitement des données et de
correction de la dispersion et de l'atténuation ont été
élaborés; tel que DAVID de l'école polytechnique (France)
élaboré sous Labview, CSHB (Waterloo-Canada)
élaboré sous VC++ par Christopher Salisbury [2], le programme
Matlab® (NSWCDD-USA) élaboré par Kaiser [22] et le programme
fortran (Watertown-USA) [55].
I.3 Récents secteurs de recherche
Dans l'ultime décade, de nombreuses publications ont
été consacrées à la détermination de la
réponse dynamique des structures en tenant compte de l'effet thermique
[13,14].
Les problèmes relatifs à la séparation et
reconstitution des ondes dans les barres élastiques et
viscoélastiques ont fait l'objet de pas mal de publications [49,53]. Des
méthodes qui tiennent compte de l'effet dispersif dans ces barres ont
été proposées [2,15].
Des travaux ont été faits pour
généraliser la méthode SHPB au cas des barres
viscoélastiques où les effets de dispersion et
d'atténuation de l'onde sont à prendre en considération.
L'étude théorique de la propagation dans les barres
viscoélastiques permettra de définir le coefficient de
propagation qui est directement relié aux caractéristiques
viscoélastiques du matériau constitutif de la barre. Des
modèles théoriques et expérimentaux ont été
proposés [2, 11,12].
Un état d'art résumant les développements
de la barre d'Hopkinson pendant le 20ème siècle est
inclus dans le manuel d'ASM [71].
Malgré les avancements de la technique à barre
d'Hopkinson, la technique n'est pas encore standard à cause de la
complexité inhérente à l'analyse des données en
présence de la dispersion, du frottement et des effets d'inertie sur le
spécimen.
CHAPITRE II
THEORIE DE LA BARRE DE PRESSION DE HOPKINSON
DIVISEE
(BPHD)
II.1 Introduction
Il est essentiel de noter au début que pour faire la
dérivation des équations de gouvernement, on assume que les deux
barres cylindriques ont une même section constante (Ab) et sont de
même matériau isotrope. En outre, on suppose que les deux barres
ne subissent que des déformations élastiques.
II.2 Equation différentielle fondamentale de la
propagation d'onde
Dans n'importe quelle section différentielle de la barre,
le déplacement axial (ub) qui est fonction de la coordonnée(x) et
de temps (t) s'exprime ub = ub (x, t) .Un
élément de volume
différentiel de la barre est donné par
dVb = Abdx où dVb est
l'élément différentiel de volume
et dx est la longueur axiale différentielle. Comme la
section transversale est constante, c'est seulement la longueur axiale
différentielle qui détermine l'élément de volume
différentiel. Ecriture de l'équilibre des forces
appliquées sur ce volume différentiel comme illustré sur
la figure 2.1 donne:
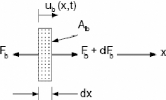
Figure II.1: Equilibre des forces pour les barres entrante(BE) et
sortante(BS) de l'appareil SHPB
? F r =mar
2
F (F
b b
+
+ = ñ
?
ub
2
dVb
? t
dF )
b b
? t
2
ñb
ub
?
2
dF b
(2.1)
A dx
b
|
est le vecteur force, m est la masse, ar est le
vecteur de l'accélération et Fb est la force
|
|
Où: F
|
appliquée dans la direction axiale à
l'élément de volume différentiel, et ñb
est la densité des barres.
La définition de la contrainte donne Fb =
óbAb et dF = d( ó A ) = d ó A +
ó dA
b b b b b b b

2
?
ub
2
? t
(2.2)
ub
Où: ób est la contrainte axiale dans la
barre. Comme la surface de chacune des deux barres est constante
(dAb = 0), le second terme s'annule. Ce qui donne:
dó b
Ab
ñ b
A dx
b
? 2
? 2 ub
? t 2
d dx
b
? t 2
ó= ñb
Comme les deux barres sont isotropes; subissant uniquement une
déformation élastique, la supposition d'un chargement uniaxial
donne la contrainte ainsi:
ó b = Ebåb (2.3)
Où: Eb est le module élastique isotrope
de la barre et åb est la déformation axiale dans la
barre. Il est aussi connu que la déformation axiale est donnée
par:
?ub
å = (2.4)
b ? x
Tel que åb = f(x,t)[16]. En correspondance,
la contrainte dans la barre doit être aussi une fonction de la position
et de temps et les différentiels totaux pour ób et x
dans l'équation (2.2) doivent être remplacés par des
différentiels partiels, ce qui donne:
?ó
? 2 u
b b
= ñ (2.5)
b 2
? t
x ?
La substitution de l'équation (2.3) dans l'équation
(2.5) en supposant que Eb est constant 0)
( =
? sur la longueur des barres réduit l'équation
(2.5) à:
Eb
2
?
ub
ñ b
2
? t
?x
?
? ? u ?

? x
b
b
? E ?
? ? x ?
?Eb
? x
?ub
? x
+ Eb
? 2 ub =
? t 2
ñ b
(2.6)
Eb
? 2 ? 2
u u
b b
=
2
2
ñb
? x?t
Equation (2.6) est l'équation différentielle aux
dérivées partielles fondamentale régissant la propagation
de l'onde de contrainte uniaxiale dans une barre élastique isotrope de
section constante [17].
II.3 Résolution de l'équation de
propagation de l'onde de contrainte
La solution analytique de l'équation (2.6),
associée avec d'Alembert, peut avoir la forme suivante correspondant
à la propagation de l'onde à gauche et à droite.
u (x , t) f (x c t) f (x c t) . (2.7)
b 1 b 2 b
= + + -
Où: f1 et f2 sont des fonctions arbitraires
déterminées à partir des conditions aux limites
et
initiales. c b est la vitesse de propagation de l'onde de contrainte dans
la barre [17].
L'introduction des variables ç = x + cbt et
æ = x - cbt simplifie l'équation (2.7) à:
u (x , t) u ( , ) f ( ) f ( ) (2.8)
b b 1 2
= ç æ = ç + æ
Maintenant, c'est relativement simple de trouver les
dérivées partielles de ub .Sachant que
?ç ?æ
= = 1, la première et la seconde dérivées
partielles de ub par rapport à x sont données
?x x
?
? u b
respectivement par:
df
(2.9)
1 2
df

= +
? x d ç d æ
2 2
?
d f
2 d f
u b 1 2
= + (2.10)
2 2 2
? x d ç d æ
Pour définir les dérivées de u b
par rapport au temps, on utilise:
?ç

?
t = cb
?æ ? =
?
et c b
t = - .Car c b est constant ?
? 0
c b b , les dérivées première et
deuxième
c ?
? =
? ? ? t ? x ?
de u b par rapport au temps sont respectivement
données par:
? u 1 2

b
? df df ?
= c ? - ? (2.11)
b
? t ? d ç d æ ?
2
? 2 u
2 ? d f
2
d f
b 1 2
2 b
= c ? +
? ? ç 2 æ 2
t d d
La substitution des équations (2.10) et (2.12) dans
l'équation (2.6) donne:
2 2 d f
2
E d f
b
? ? ? d f
2
d f ?
1 2 2 1 2
? + ? = ? +
?
2 b

c
ñ ç 2
? d æ ? ? ç 2 æ 2
d d d
b ?
.

Eb
ñb
De l'équation (2.13), il est évident que la vitesse
de l'onde de contrainte est
? u ? u
b b
v v (x , t)
= = = #177; c
b b b
?t ? x
(2.14)
On note aussi que les équations (2.9) et (2.11) sont
conformées avec la solution de d'Alembert et donnent:
Où: vb (x, t) est la vitesse dans la barre
entrante ou sortante [17].
II.4 Développement des équations
régissant le spécimen
Etablissement de l'équilibre des forces dans la direction
x sur l'échantillon présenté à la figure II.2
mène à (Fg = Fd). Avec Fd est la
force appliquée sur sa face droite (interface
spécimen/barre sortante) et Fg est la force
appliquée sur la face gauche du spécimen (interface
spécimen/barre entrante). Il est important de noter que
ces forces et en conséquence les
contraintes et les
déformations sont dynamiques; elles changent avec le temps
(Fd, Fg = f(t)).
Cependant, l'hypothèse de l'équilibre est encore
valide tant qu'une précaution est prise pour s'assurer que les forces
sur l'une ou l'autre extrémité du spécimen (S) demeurent
équivalentes durant l'évènement dynamique.

Figure II.2: Equilibre des forces pour le spécimen dans le
dispositif BPHD
Sous les conditions d'équilibre dynamique, les forces
dans les barres entrante et sortante aux interfaces avec le spécimen
sont égales et opposées à ceux dans le spécimen
.Elles sont données par:
F (t) F (t) (t)A E A (t) (2.15)
g d b b b b b
= = ó = å
Où: åb (t) est la déformation
axiale "effective" dépendante de temps à
l'extrémité gauche ou
droite du spécimen. L'équation (2.15) permet aux
pulses de déformation incidente, réfléchie,
et
transmise dans les barres d'être utiliser comme
représentations des forces Fg (t) et Fd (t) dans
le
spécimen. Utilisant les déformations effectives
appropriées, l'équilibre de force est donné par:
F (t)
g F (t)
d
A E ( (t) (t)) A E (t) (2.16)
b b I R b b T
å + å = å
å T (t)
(t)
= å + å
I R
(t)
Où: åI (t), å R (t) et
åT (t) respectivement, les déformations axiales
dépendantes de temps:
incidente, réfléchie et transmise. On note que la
déformation effective à l'interface
barre
entrante/spécimen est la somme des déformations
incidente et réfléchie tandis que la
déformation effective à l'interface barre
sortante/spécimen est simplement la déformation transmise.
La contrainte moyenne dans le spécimen est donnée
par:
g d
+ A E
ó =
(t) = å + å + å
( (t) (t)
S b b
I R T
2A2A
F (t) F (t)
(t)) (2.17)
Où: A S est la surface de la section
transversale du spécimen
Comme le spécimen est en équilibre, la force
axiale appliquée au spécimen est donnée au choix par l'une
des deux forces de côtés. Pour la simplicité, puisque c'est
un seul terme, on prend celle de la face droite. Alors, on écrit:
F S (t) = Fd(t) = EbAbåb(t) (2.18)
Avec FS (t) est la force axiale dépendante de
temps agissant sur le spécimen. Par correspondance, la contrainte dans
le spécimen est donnée par:
(t) å
F (t) E A (t)
b b T
ó = =
S (2.19)
S A
A S S
Où: ó S (t) est la contrainte axiale
dépendante de temps dans le spécimen. Le taux de
déformation du spécimen est obtenu en dérivant par rapport
au temps la déformation.
d ? ? u b b
? ? u

å& = å =
(t) ( (t)) ( ) = ( ) (2.20)
S
S
dt ? t ? x ? x ? t
Avec å& S (t) est le taux de déformation
axiale dans le spécimen et å S (t) est la
déformation axiale dans le spécimen. Notons qu'ici u b
est supposé une fonction continue de position et de temps pour
échanger les dérivées partielles.
? ), permet l'écriture du taux de
Ä
? x Ä x

La discrétisation de l'équation (2.20) en x (
déformation du spécimen en termes de vitesses
à chaque extrémité du spécimen. La substitution de
cette relation dans l'équation (2.19) donne :
Ä
? u b
? ? u Ä v (t) v (t)
b g d
-
? t v(t)
å& = ( ) = (2.21)
S (t) =
? x ?t Äx LL
S S
Où: v(t) est la vitesse axiale dépendante de
temps à l'interface barre/spécimen, L S est la
longueur axiale du spécimen, v g (t) est la vitesse axiale
à l'extrémité gauche du spécimen, et vd
(t) est la vitesse axiale à l'extrémité droite du
spécimen.
L'équation (2.14) donne les vitesses à chaque
extrémité du spécimen comme étant les produits de
la vitesse de l'onde de contrainte dans la barre entrante ou sortante et la
déformation effective à l'interface barre/spécimen.
Donc:
vg (t) = cb (å I (t) -
å R (t)) (2.22)
vd(t) = cb å T(t)
(2.23)
La substitution des équations (2.22) et (2.23) dans
l'équation (2.2 1) donne:

v (t) v (t)
g d
-
å (t)
& S
c (å (t)
b I
å (t)
& S
L S
L S
å (t) å (t))
R T
-
(2.24)
La substitution de la relation de åT (t)
donnée par l'équation (2.16) réduit l'équation
(2.24) à:

(t)))
+ å R
å (t)
& S
(t)
2c
å R
b
å (t)
& S
L S
c (å (t) å (t) (å (t)
b I R I
- -
L S
(2.25)
Par utilisation de l'équation (2.19), on peut trouver
la contrainte dans le spécimen en fonction de la déformation
transmise. Cependant, pour trouver la déformation dans le
spécimen, l'équation (2.25) doit être
intégrée pour donner:
t t 2c ( )
å ô 2c t
b
å = å ô ô = ?
(t) ( )d d ô = - å ô ô
( ) d . (2.26)
S 0 S
? & ? ?
b R
0 R
0L L
S S
Où: ô est un facteur d'intégration. Pour
un nombre discret de points de données, équation (2.26) est
modifiée de l'intégral à une sommation. Dans sa forme la
plus simple, l'approximation discrétisée de l'intégral est
donnée par:
N
2c t 2c
å = - å ô ô ? ? å Ä
b
(t) ? = ?
b
( ) d (2.27)
R i
t
S 0 R
L L
S S t 0
Avec å Ri est la valeur de la déformation
au temps donné par: ti = N Ä t.
La contrainte vraie et la déformation vraie,
respectivement ó V (t) et å V (t) , peuvent
être
obtenues à partir de la contrainte technologique et de la
déformation technologique (Engineering stress-strain) par la formulation
suivante [18]:

--
t)
(
(1
(t)
aV
c S
(t)
t))
(
t)) (
a S
c= -- -- c
V S
ln(1
(2.28)
II.5 Approches de validité de l'essai BPHD
Un essai BPHD valide nécessite la vérification
de certaines approches. Pour pouvoir utiliser les équations (2.19) et
(2.25) ou (2.26) dans le calcul du comportement contrainte- déformation
d'un spécimen sous un chargement à taux de déformation
élevé, à partir des quantités mesurées de
l'essai BPHD, il est important de satisfaire les approches/conditions ci-
après [49].
1) La propagation de l'onde de contrainte dans la barre est
1D. Les conditions qui satisfont cette approche nécessitent que les
barres soient:
a) homogènes et isotropes: Ceci peut être satisfait
par le choix convenable du matériau des barres.
b) uniformes dans la section transversale sur la longueur
entière et l'axe neutre est droit: Un usinage de précision des
barres (faible excentricité) peut assurer que la section transversale
est uniforme et l'axe neutre est droit.
c) sous un état élastique linéaire de
contrainte lorsqu'elles sont sollicitées par des pulses de contrainte:
Par le contrôle de la vitesse d'impact, il est possible de maintenir la
contrainte dans le pulse inférieure à la limite élastique
du matériau de la barre.
d) à distribution axiale uniforme de contrainte
à travers l'entière de la section transversale: Selon Davies [4],
un rapport (Lb/Db >20) entre la longueur de la barre (Lb) et son
diamètre (Db) satisfait cette condition.
e) exemptes des effets de dispersion: Cette approche
spécifique n'est pas valide pour les barres métalliques de grands
diamètres (diamètres supérieurs à 12 mm) ou les
barres viscoélastiques [15]. Les effets de dispersion sont à
corriger. Ils seront discutés dans le troisième chapitre.
2) Les interfaces barre entrante-spécimen et barre
sortante-spécimen restent planes à tout moment. Ceci peut
être satisfait, généralement, si:
a) Le spécimen est acoustiquement ductile; c.à.d,
il a une faible impédance acoustique (Figure II.3).
b) Le diamètre du spécimen est égale
à celui de la barre (ou bien légèrement inférieur
à celui de la barre comme mentionné par Kolsky [5]).
c) Un disque très dur est utilisé aux interfaces
barre-spécimen.
3) Le spécimen est en équilibre de contrainte
après une période initiale appelée " Sonner vers le haut
". La gamme de déformation où cette condition est satisfaite est
obtenue par comparaison des analyses 1D et 2D de l'onde. Une épaisseur
minimale possible peut minimiser le temps Sonner vers le haut (elle
dépend de la vitesse du son dans le spécimen), mais elle ne peut
pas l'éliminer.
4) Le spécimen n'est pas compressible. Cette condition
est facilement satisfaite; cependant, pour les mousses et les matériaux
non linéaires, des techniques d'analyse spéciales peuvent
être utilisées.
5) Frottement et effets d'inertie dans le spécimen
sont minimaux: Cette condition peut être satisfaite par lubrification des
interfaces barre-spécimen. Cependant, l'utilisation du lubrifiant peut
changer le comportement acoustique de l'interface.

Figure II.3: Conditions pour des interfaces
barre-spécimen planaires. Les numéros 1 et 2 représentent
des interfaces BE-S et S-BS respectivement. Symbole * dénote l'endroit
des interfaces quand le spécimen est déformé [49].
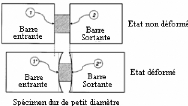
Figure II.4: Déformation des interfaces
barre-spécimen pour petit diamètre des spécimens
acoustiquement dur [49]
II.6 Conception des spécimens pour l'essai
BPHD
La conception d'un spécimen est la partie la plus
critique de l'expérience BPHD. Il n'y a aucune règle universelle
pour la conception du spécimen. Souvent, les spécimens sont
conçus à partir des expériences exploratoires. La
conception du spécimen doit satisfaire les approches
générales de la technique BPHD.
II.6.1 Effets d'inertie et de frottement
Le diamètre maximal du spécimen (Ds) est
égal au diamètre de la barre (DB). Gray III [61] a
suggéré que les effets de frottement et de l'inertie radiale et
longitudinale puissent être diminués en réduisant au
minimum la disparité de surface entre la barre et le spécimen Ds
·-,' 0.80 DB; et en choisissant un rapport Es/Ds entre 0.50 et 1.0,
qui est basé sur les corrections des effets d'inertie radiale et
longitudinale proposées par Davies et Hunter [35]:
|
E2 vsDs1 ( ô2£(t)
as (t) =
asm 8 (t) + Ps [ 6 -- ] ôt2 )
|
(2.29)
|
Où l'indice inférieur s représente le
spécimen, et les indices supérieurs c et m
signifient corrigé et mesuré,
respectivement.
Le second terme de l'équation 2.29 est un terme de
correction à ajouter avec la contrainte moyenne mesurée du
spécimen. Le terme de correction sera zéro, si le taux de
contrainte est constant ou le terme encadrée est nul. La condition
suivante fournit le rapport optimal du spécimen pour l'effet d'inertie
et est exprimée comme:
Es/Ds = -J3vs/4 (2.30)
Pour un coefficient de Poisson vs = 0.333, l'optimum de Es/Ds
est 0.50. Selon ASTM E 9, pour minimiser les effets de frottement en essai de
compression des matériaux métalliques à la
température ambiante, le rapport Es/Ds devraient être dans la
gamme 1.50-2.00. Ainsi les conditions pour un minimum d'effets de frottement et
d'inertie ne peuvent pas être satisfaites simultanément et la
suggestion de Gray III [61] de (0.50 < Es/Ds < 1.0) peut être prise
comme un compromis entre ces deux effets. Pour un spécimen ayant Es/Ds
< 1.5, des chercheurs ont utilisé un lubrifiant pour réduire
le frottement; comme l'huile de bisulfure à base de molybdène
pour une température ambiante et une poudre fine de nitrure de bore pour
des essais à hautes températures. Des efforts ont
été également faits pour quantifier le frottement en
utilisant des spécimens annulaires [62].
Si la condition d'un taux de déformation constant est
utilisée, alors on peut
effectivement utiliser des spécimens plus minces Es/Ds
< 0.5, et ainsi minimiser le non- équilibre de contrainte dans le
spécimen. Habituellement, les conditions d'un taux de déformation
constant peuvent être atteintes par des impulsions incidentes
formées. Cependant, les taux de déformation possibles dans ces
cas sont limités par le taux de contrainte de l'impulsion incidente
[63], et sont décrits après.
II.6.2 Equilibre de contrainte, contrainte uniaxiale et
formation d'impulsion
L'épaisseur optimale du spécimen dépend
du temps de montée t nécessaire pour atteindre un
état uniaxial de contrainte dans le spécimen. Le temps de
montée est estimé comme le temps requis pour n
réverbérations dans le spécimen [36]. Pour un solide
déformant plastiquement qui obéit à la théorie de
Taylor-Von Karman, le temps de montée est donné par:
t2 (7T2psEs2)/(Do-/De)
(2.31)
Où ps et Es sont respectivement la densité et
l'épaisseur du spécimen. Do-/De est la deuxième
étape du taux de travail de durcissement du vrai diagramme
contrainte-déformation du matériau à tester. En diminuant
l'épaisseur du spécimen, il est ainsi possible de réduire
le temps de montée .Cependant, la condition sur Es/Ds pour
réduire au minimum les effets de frottement et d'inertie exigent que le
diamètre du spécimen également soit réduit. Par
conséquent, on doit utiliser une barre de plus petit diamètre
aussi bien pour satisfaire les conditions, Ds
·-,' 0.80 DB et 0.50
< Es/Ds < 1.0. L'expérience de Kolsky [5] avec (0.01 <
ES/DS<0.10, ainsi ne représente pas le cas uniaxial de
contrainte.
Une solution pour réduire le temps de montée
dans le spécimen est l'utilisation d'une impulsion formée. Le
temps de montée d'une impulsion quasi-rectangulaire, produite par
l'impact direct du projectile, est généralement plus petit que le
temps de montée du spécimen. Si un disque métallique
élastoplastique mince (Matériel de bout, [61]) est utilisé
entre la barre incidente et de le projectile, l'impulsion incidente aura la
forme d'une rampe et presque un taux de contrainte constant est atteint.
L'utilisation d'une impulsion incidente "rampe formée"
doit théoriquement produire une impulsion réfléchie
constante, selon la théorie de 1D BPHD, qui représente un taux de
déformation constant du spécimen. La condition d'essai à
taux de déformation constant est essentielle pour un essai de
caractérisation valide du matériau. Selon l'équation 2.29,
un tel essai peut être réalisé sur n'importe quel taux
Hs/Ds du spécimen, satisfaisant la condition du minimum de
frottement.
La technique de formation de l'impulsion (pulse-shaping) a
été introduite en premier temps pour tester les spécimens
en céramique [63] quand les chercheurs ont observé que les
spécimens en céramique rompent prématurément, avant
que l'équilibre des contraintes soit atteint. L'utilisation d'une
impulsion formée a résolu ce problème. Une impulsion rampe
formée ne contient pas les hautes oscillations de fréquence
(modes de Pochhammer) et ainsi l'effet de dispersion est minimal. Bien que la
formation de l'impulsion réduit généralement le taux de
déformation dans le spécimen. Pour satisfaire la condition du
taux de déformation constant dans le spécimen chaque essai de
BPHD devrait utiliser une impulsion formée indépendante du genre
de matériaux du spécimen (doux, dur, non homogène,
fragile, non linéaire, etc.). Le taux de déformation et la
déformation totale dans le spécimen peuvent alors être
changés par un choix approprié du matériau de bout ou de
la géométrie du formeur de l'impulsion, de la longueur du
projectile et de la vitesse d'impact de projectile.
II.6.3 Autres considérations
Il est important que le spécimen fabriqué d'un
matériau particulier contienne les unités multiples de sa
structure répétitive pour représenter les
propriétés en bloc .Cette condition est importante dans le cas
des matériaux polycristallins de grand grain, composites
renforcés par des fibres, et matériaux cellulaires. La structure
des matériaux bruts nécessite souvent un plus grand
diamètre de la barre (75-100 mm de diamètre est exigée
pour tester le béton). Les matériaux fragiles, comme les
céramiques, exigent une conception spéciale du spécimen
pour assurer l'uniformité de contrainte avant la rupture. Couque et
autres [64] ont utilisé des spécimens coniques avec anneaux
chanfreinés pour supprimer se division axial en cas des composites
L'utilisation des sections non-uniformes le long du spécimen. La
longueur rend la réduction de données plus complexe La
tolérance sur la géométrie du spécimen est
importante pour assurer une déformation uniforme. Gray III [61] a
mentionné que les faces de chargement du spécimen doivent
être parallèles avec une tolérance de 0.01
millimètre.
II.6.3.1 Considérations spéciales pour les
matériaux doux
C'est bien accepté dans la communauté de
recherche de la barre d'Hopkinson [61] que les méthodes
expérimentales de BPHD et l'analyse des données de 1D sont
généralement valides pour les métaux
élastoplastiques qui satisfont les conditions mentionnées dans la
section, approches de validité de l'essai BPHD. Cependant, des
difficultés additionnelles surgissent dans le cas des matériaux
doux et durs, qui incluent toutes sortes de matériaux technologiques
autres que les métaux élastoplastiques. Le manuel d'ASM [61]
consacre deux
sections séparées à l'essai BPHD; une
pour les matériaux doux [24] et l'autre pour les céramiques [63].
On doit lire ces sections avant de les examiner.
Les matériaux doux incluent une grande
variété de matériaux polymères, mousses des
métaux et des polymères, et des matériaux granulaires.
Sous conditions d'essai de BPHD, Cette classe de matériaux est
caractérisée par leurs très faibles impédances
acoustiques. Elle génère des impulsions transmises très
faibles/faibles si une barre traditionnelle en acier avec un gain
élevé est utilisée. Des chercheurs ont utilisé des
barres de faible impédance (barres en titanium, aluminium et
magnésium [65, 66]) où de bons signaux de transmission peuvent
être obtenus. D'autres ont utilisé des barres polymères
[67-69] (PMMA, PC) pour tester des matériaux doux. L'utilisation d'une
barre polymère exige des analyses additionnelles du comportement
viscoélastique de la barre. Elle ajoute plus de complexité en
comparaison avec les barres métalliques de faible impédance. En
plus des barres pleines métalliques et polymères de faible
impédance, Chen et autres [70] ont utilisé une barre sortante
creuse en aluminium pour obtenir un rapport signal sur bruit mieux que pour les
barres pleines. L'issue principale dans l'essai des matériaux doux est
d'obtenir une bonne impulsion transmise, ce qui peut être
réalisé par l'utilisation des barres de faible impédance.
Cependant, toutes les approches d'équilibre de contrainte, uniforme et
contrainte uniaxiale, effets d'inertie et de frottement, et conditions de
dispersion doivent être satisfaites pour une expérience valide de
BPHD.
La faible vitesse de l'onde dans les matériaux doux
fait le temps de passage dans le spécimen beaucoup plus long que dans
les matériaux métalliques. Ainsi, un spécimen mince est
nécessaire pour satisfaire la condition d'équilibre de
contrainte. D'une part, il est trouvé que le rapport LS/DS
dépend fortement du comportement contrainte-déformation des
matériaux doux [24]. Chen et autres [70] ont observé une
atténuation substantielle de l'onde dans des échantillons
épais en caoutchouc RTV630 (0.25') par rapport aux échantillons
minces (0.06'). Selon la température et le matériau du
spécimen, ils suggèrent qu'un rapport LS/DS de 0.25-
0.50 peut être utilisé pour réduire
l'atténuation.
A raison de la nature viscoélastique de quelques
polymères et composites polymères à la température
ambiante, une procédure spéciale est adoptée au
Laboratoire National de Los Alamos pour usiner des spécimens de BPHD
à surfaces de chargement parallèles avec une tolérance de
0.03 mm [24]. Le spécimen est refroidi à l'azote liquide
au-dessous de sa température de transition vitreuse. Ensuite, il est
usiné dans son état durci; et lentement réchauffé
de nouveau à la température ambiante.
Gray III [61] a suggéré qu'une analyse par
éléments finis de l'expérience de BPHD puisse être
utile en réduisant les données expérimentales avec
confiance, en concevant
l'expérience de BPHD, et en utilisant des techniques
expérimentales de la barre non standard de Hopkinson. Essai de BPHD des
matériaux poreux et granulaires exige des outils diagnostiques
additionnels du spécimen, tels que la photographie ultrarapide et
l'analyse lagrangienne couplée [61].
CHAPITRE III
ANALYSE SPECTRALE DE L'ONDE
III.1 Introduction
L'analyse de la dispersion et de l'atténuation des
ondes est généralement faite par des méthodes spectrales.
Une explication détaillée du changement en domaine
fréquentiel et de la manière de propagation des ondes est
donnée ici. Cette compréhension est fondamentale lors de
l'analyse de la propagation d'onde dans un milieu.
III.1.1 Transformée de Fourier et la
FFT
La transformée de Fourier introduit la notion de
spectre. C'est la caractéristique fréquentielle d'un signal. Ce
dernier peut être défini dans deux espaces, soit temporel ou
fréquentiel. L'analyse spectrale d'une onde périodique complexe
peut être représentée par la superposition d'une
série de sinusoïdes de fréquences reliées
harmoniquement [29]. L'équation générale pour une
sinusoïde harmonique simple est:
f(t) =a 0 +
r1 sin(ù 0 t +
è1) (3.1)
Où a0 est l'excentrée,
r1 est l'amplitude, ù0 est une
fréquence angulaire qui décrit la nature
périodique, et
è1 est l'angle de phase ou le déphasage de
l'onde. L'angle de phase décrit la
quantité de déphasage le long de l'axe de temps de
l'onde. En appliquant l'identité trigonométrique:
r t r t t
1 0 1 1 0 1 0 1
cos( ) [cos( ) cos( ) sin( ) sin( )] (3.2)
ù è ù è ù
è
+ = -
A l'équation (3.1), une forme alternative de l'onde peut
être écrite comme:
f
t a 0 a 1 0 t b 1 0
t
( ) cos( ) sin( )
= + ù +
ù
Où:
a1 = r1
cos(è1) (3.4)
b1 = -r1
sin(è1) (3.5)
Par conséquent, un signal peut être
représenté par une série de Fourier continue écrite
comme:
8
f t a a K k t b K k t
( ) [ cos( ) sin( )]
= + +
? (3.6)
0 0 0
ù ù
k=1
ù0 est la fréquence
fondamentale et k est un nombre entier. Les multiples de fréquence
(kù0)
sont connus comme harmoniques. Une fonction de période
T dans le domaine temporel peut
donc être liée au
spectre de composantes (ak et bk) dans le
domaine fréquentiel. Les figures
III.1a, III.1b et III.1c illustrent comment une onde
carrée peut être décomposée en une
série
d'ondes cosinusoïdales. Si assez de termes sont inclus,
alors la superposition de toutes les
composantes aurait comme conséquence une onde identique
à l'onde carrée.
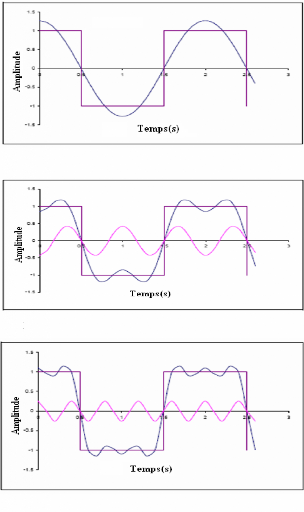
Figure III.1a: Composante de Fourier primaire d'une onde
carrée
Figure III.1 b: Addition de la seconde composante harmonique
Figure III.1c: Addition de la troisième composante
harmonique
En plus de l'amplitude de chacune des composantes de la
série de Fourier, un angle de
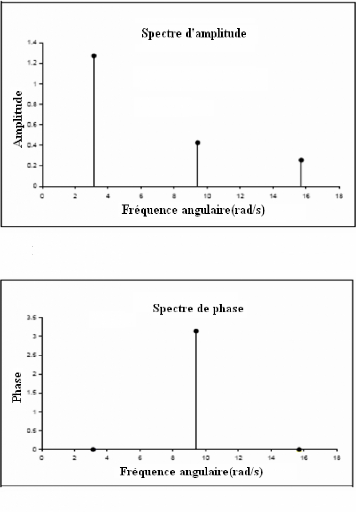
Figure III.2a: Spectre d'amplitude pour les trois premiers
termes
Figure III.2b: Spectre de phase pour les trois premiers termes
phase correspondant doit également exister. Les
spectres d'amplitude et de phase sont nécessaires pour reconstruire
l'onde dans le domaine temporel. Pour l'exemple de l'onde carrée, les
spectres d'amplitude et de phase sont montrés sur les figures III.2a et
III.2b respectivement. En analysant les spectres d'amplitude et de phase un
plus grand aperçu des propriétés de l'onde peut être
eu.
L'analyse ci-dessus a été faite pour un signal
périodique ou répétitif. Cependant, c'est, impraticable
pour analyser la propagation de l'onde puisqu'une onde de contrainte est
apériodique. Pour l'analyse des signaux apériodiques, une
alternative à la série de Fourier a été
développée. Une transformée de Fourier paire permet la
transformation d'un signal apériodique au domaine fréquentiel et
vice-versa. La base de la transformée de Fourier est l'intégrale
de Fourier qui est donnée par:
F ( ) i 0 t
~ 1
= f t e dt
? ù
? + 8 (3.8)
T -8

~
|
Où F
|
est la transformée de Fourier continue (TFC),
ù0 est définie avant et i est un
nombre
|
complexe ( -1). L'intégrale de Fourier est
dérivée des séries de Fourier dans sa forme
exponentielle en appliquant les identités d'Euler.
L'application des limites infinies permet la définition d'un signal
apériodique. En d'autres termes, lorsque la période devient
infinie, le signal ne se répète jamais, devenant
apériodique. La deuxième partie de la transformée de
Fourier paire est la transformée inverse qui est donnée par :
f t = F ( ù ) e - i
ù 0 t d ù
? + 8 ~
( ) (3.9)
-8
|
~
Le symbole ~ indique le domaine de fréquence d'une
fonction. F
|
a les composantes réel
|
et imaginaire qui sont liées respectivement aux termes
aK et bK de la série de Fourier. Pour
la
plupart des cas, la fonction f(t) n'est pas connue
analytiquement. Normalement le signal est
connu en termes du signal discret mesuré par un
système d'acquisition de données. Pour ce cas, la
transformée de Fourier discrète (TFD) a été
développée. La TFC écrite en termes des
échantillons (n) donne la transformée paire TFD qui s'exprime par
:
F f e ù pour k à N
~ 0
= - = -
ik n
? 0 1 (3.10)
k n
n = 0
1
0
N - 1
f ù
- ik n =
? = -
0 1
n f n e pour k à N
(3.11)
Nn=0
Où: N est le nombre des échantillons.
Bien que c'est la forme la plus pratique de la
transformée de Fourier, elle exige 2
N opérations complexes ce qui la rend
impraticable manuellement et intimide pour le calcul à l'aide des
ordinateurs. Pour alléger une partie du fardeau de calcul, des
sous-programmes de la transformée de Fourier rapide (FFT) ont
été développés. La plupart des sous-programmes de
FFT réduit 2
N opérations à N log2
(N) opérations, ce qui permet un calcul plus efficace des
coefficients de Fourier. Le lecteur est
référé à Press et autres [30] pour une description
détaillée des sous-programmes de FFT.
|
~
F k
|
a une partie réelle et une partie imaginaire. Alors, il
peut être exprimé en coordonnées
|
|
~
rectangulaires et polaires. En forme rectangulaire,
Fk
~
|
représente les coefficients de la série de
|
|
Fourier. La forme polaire de Fk
|
est liée à la forme rectangulaire par:
|
F k a k ib k re è ~
i k
= + = (3.12)
b
Avec: ( ) tan ( )
2 2 1
-
r a b et k
k k k k
= + =
è
ak

(3.13)
rk est le module et
èk est l'argument (l'angle de phase). Bien que la
plupart des routines
FFT retournent les résultats en forme rectangulaire,
une meilleure compréhension des propriétés de l'onde est
atteinte avec la forme polaire. Quelques considérations spéciales
doivent être prises en considération lorsqu'on passe de la forme
rectangulaire à la forme polaire. Lors de la détermination de
l'angle de phase par la fonction arctan, on doit faire attention que l'angle a
été ajusté à son quart de cercle. La plupart des
programmes mathématiques supposent que l'angle se trouve dans le premier
quart de cercle et ainsi un certain ajustement est nécessaire. L'angle
de phase devrait se situer dans l'intervalle -ð = è
= ð. Aussi bien, les angles de phase doivent être
redéployés "Unwrapped". En redéployant les spectres de
phase, une fonction continue est obtenue en ajoutant ou en soustrayant des
multiples de 2ð quand les sauts absolus entre les spectres
consécutifs de phase sont plus grands que de ð radians (La figure
III.3). Cette procédure compte sur le déphasage relatif à
la première composante ou au terme DC. Le terme DC se produit quand
n = 0 et représente l'aire sous la fonction de temps.
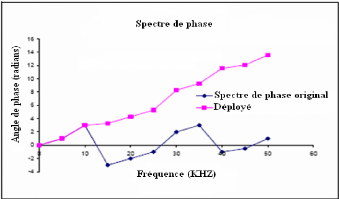
Figure III.3: Redéploiement du spectre de phase
III.1.2 Propagation d'onde dans le domaine de
fréquence
Un des aspects les plus utiles de la transformée de
Fourier est la capacité d'analyser et de prévoir comment les
ondes propageront. Quand une onde propage le long d'une tige, essentiellement
elle est décalée dans le temps. Si une onde carrée simple
est symétrique par rapport le temps zéro, il peut être vu
que la partie imaginaire de la transformée est zéro et qu'il n'y
a aucun déphasage. Si l'onde est déplacée le long de l'axe
de temps, la transformée aura les deux parties; réelle et
imaginaire. La partie réelle est une fonction paire tandis que la partie
imaginaire est une fonction impaire. La figure III.4 montre ces relations pour
une impulsion carrée en utilisant le TFC. En termes de
coordonnées polaires, les amplitudes des impulsions originale et
décalée sont identiques; la seule différence est celle de
la phase. Ceci indique qu'une variation dans le temps correspond à un
changement de phase dans le domaine de fréquence. Ceci mène
à la relation suivante:
f t t F e r e n
( ) ( ) 0 0 0 0
- = ù - = -
i t
ù è ù
i t
( ) (3.14)
0 n n
Où t0 est la quantité de
variation dans le temps.
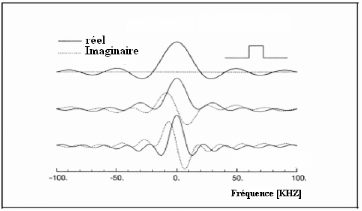
Figure III.4: Composantes réelle et imaginaire pour une
impulsion carrée soumise à des quantités
différentes de déphasage, Doyle [31]
Connaître la manière de propagation d'une onde
dans un matériau est d'importance primordiale dans l'analyse d'onde. La
dispersion et l'atténuation de l'onde peuvent avoir lieu lorsqu'elle se
propage dans certains milieux. La dispersion est liée à
l'allongement d'une onde pendant la propagation dans un milieu tandis que
l'atténuation est liée à une réduction d'amplitude.
La dispersion et l'atténuation sont des actions en corrélation
qui sont généralement
couplées. En d'autres termes, s'il y'a dispersion, il
y'a généralement atténuation. La figure III.5 montre ces
effets. L'atténuation et la dispersion peuvent être
provoquées par une variété de facteurs comme, les
propriétés du matériau et les contraintes
géométriques. La capacité de séparer les
composantes d'une onde est une clé pour analyser les relations de
dispersion et d'atténuation. La figure III.6 illustre les composantes
d'une onde en fonction du temps. Le train d'ondes du côté gauche
illustre un système non dispersif. Pendant la propagation d'onde, ses
différentes composantes ont la même vitesse et gardent donc dans
la même position relative entre elles. Ceci signifie qu'à tout
moment donné l'addition des différentes composantes de l'onde
aura comme conséquence la même onde. Pour le système
dispersif, montré à droite du de la figure III.6, les trains
d'onde ont différentes vitesses ce qui change leurs positions relatives.
Ceci signifie que pendant la propagation du train d'ondes, l'onde
résultante se déformera avec le temps. La vitesse de
déplacement de chaque composante s'appelle la vitesse de phase. Elle qui
est donnée par:
x ù
c= = (3.15)
t k
Où c est la vitesse de phase, t est le temps, x est la
distance mesurée à partir de l'interface et k est le nombre
d'onde. En reliant la vitesse de chaque phase à la fréquence, un
rapport dispersif peut être développé [31, 32, 33]. Le
rapport entre le nombre d'onde et la fréquence s'appelle le rapport de
spectre. La vitesse à laquelle l'onde superposée se
déplace s'appelle la vitesse de groupe (cg). C'est
l'onde actuellement observée.
Si l'onde est mesurée en un point, alors elle peut
théoriquement être prévue à un autre point en
appliquant une fonction de transfert à l'onde originale. En d'autres
termes, si on sait le rapport dispersif, on peut prévoir comment une
onde propagera à travers un matériau.
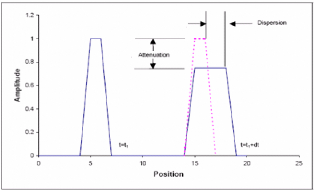
Figure III.5: Illustration des effets de la dispersion et de
l'atténuation [2]
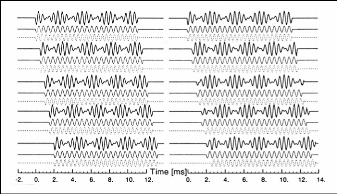
Figure III.6: Segments d'un train infini d'ondes à
différentes positions.
Gauche: Système non dispersif. Droite:
Système dispersif, Doyle [31]
III.1.3 Équations d'onde
Afin de prévoir l'état de propagation d'une onde
dans un milieu, un modèle décrivant son mouvement doit être
formulé. Le développement des équations de
fréquence de Pochhammer [34] et de Chree [35] forme la base pour
l'analyse de la propagation longitudinale d'onde. Ces équations relient
la vitesse de phase à la fréquence pour une propagation
unidimensionnelle de l'onde. Selon Follansbee [36] une analyse
unidimensionnelle est suffisante puisque la majorité de l'énergie
est contenue dans les longueurs d'onde qui excèdent dix fois le rayon de
la barre. Ceci signifie également que la mesure extérieure de la
contrainte est un indicateur valide de déplacement axial.
L'équation unidimensionnelle du mouvement d'onde est:
2 ? 2
? u u

T = ñ (3.16)
? x
2 t 2
?
Où T est la force de tension axiale dans le
matériau et ñ est la densité.
Le changement au domaine de fréquence et la
résolution de (3.16) donne:
u x t u x F n G K mn x e
= = ?
~ i nt
ù
( , ) ( , ù ) ( )(3.17)
Où Fn est le spectre d'amplitude et
le G est la fonction de transfert du système; Doyle [31].
L'indice inférieur m se rapporte au mode de la
solution. Généralement, seulement le premier mode est
considéré; Cheng et autres [38]. La fonction de transfert
détermine la quantité d'atténuation du déphasage en
fonction de l'espace. On verra plus tard que la fonction de transfert sera
liée au coefficient de propagation ã.
On considère un matériau élastique
analysé linéairement. La dispersion est ignorée si le
rapport de la longueur d'onde (ë) au rayon (R) est
beaucoup moins à l'unité; Davies [4].
Follansbee et Frantz [32] ont déterminé que la
dispersion est une considération importante même lorsque
ë/R << 1 pour les barres linéairement
élastiques.
Les effets viscoélastiques créent des
problèmes avec les barres polymères. L'utilisation des barres
fabriquées de ces matériaux exige une plus grande
compréhension des propriétés du matériau de la
barre. L'atténuation et la dispersion ont de grands effets sur les
ondes; incidente, réfléchie et transmise. Le problème est
que la mesure de la jauge de contrainte au milieu de la barre ne correspond pas
aux conditions à l'interface barre-spécimen. Par
conséquent, la réduction de quelques données est
exigée. Une variété de méthodes a été
suggérée pour combattre ce problème.
III.2 Méthodes de correction de la dispersion et
de l'atténuation
La correction de la dispersion améliore la forme de la
courbe contrainte-déformation dynamique [53]. Des méthodes
expérimentales et théoriques sont à utiliser pour corriger
la dispersion et l'atténuation d'un signal.
III.2.1 Méthodes analytiques
L'approche théorique pour résoudre ce
problème exige qu'un modèle viscoélastique du
matériau soit formulé. Le modèle est utilisé pour
simuler le comportement du matériau de sorte que l'onde puisse
être prévue à un certain point de mesure connue. Kolsky
[39] illustre les trois modèles les plus généralement
utilisés pour simuler la réponse viscoélastique. Les trois
modèles, représentés sur la figure III.7, sont
composés d'éléments amortisseur et ressort. Les
différentes configurations de Voigt, de Maxwell et du Solide
général modélisent les différents types de
comportements dynamiques. Le modèle de Voigt est fondé sur
l'hypothèse que les composantes de la contrainte dans un solide sont
proportionnelles à la somme de la déformation et du taux de
déformation. Dans le solide de Maxwell, le taux de contrainte est
proportionnel au taux de déformation et à la contrainte. Alors,
les solides de Maxwell et de Voigt réagissent de manières
opposées. On a une décroissance logarithmique inversement
proportionnelle à la fréquence dans l'amplitude de la vibration
pour des solides de Maxwell et directement proportionnelle pour des solides de
Voigt. Le modèle le plus général est une combinaison des
éléments de Maxwell et de Voigt. Le résultat est un
modèle qui est plus utile en décrivant la nature qualitative du
matériau viscoélastique. Cependant, même le modèle
général ne correspond pas bien aux résultats quantitatifs
exceptés sur une petite gamme de fréquence. Wang et autres [40]
proposent que le
modèle non linéaire de Zhu-Wang-Tang (ZWT)
puisse simuler le comportement viscoélastique des matériaux
polymères. Le modèle de ZWT est une compilation de deux solides
de Maxwell parallèlement à un ressort. Par simulation
numérique, ils peuvent prédire précisément la
réponse viscoélastique connaissant les propriétés
du matériau.
Tyas et Watson [41] utilisent la simulation numérique
pour déterminer le comportement viscoélastique d'un
matériau. Ils simulent l'historique d'une force d'entrée
appliqué à l'extrémité d'une barre tout en
enregistrant le signal dispersé à une certaine distance de
l'extrémité. A partir de l'entrée connue et la sortie
enregistrée, le rapport dispersif peut être
déterminé.
Sawas et autres [42] ont utilisé des barres en
acrylique pour examiner des échantillons en polycarbonate, mousse de
polyuréthane et mousse de styrol avec un certain succès. Leur
méthode de réduction de données exige une connaissance a
priori des propriétés du matériau des barres acryliques.
Ces propriétés sont utilisées pour résoudre une
forme de l'équation d'ondes viscoélastique permettant à la
propagation de l'onde d'être prévue.
Zhao et Gary [43] ont développé une
équation d'onde tridimensionnelle basée sur l'équation de
propagation de l'onde longitudinale de Pochhammer et Chree. Par comparaison
avec des résultats empiriques, ils prouvent que l'application du
modèle tridimensionnel prévoit plus exactement l'état de
propagation des ondes dans des milieux viscoélastiques. Zhao et Gary
[44] ont également étendu ce travail afin d'inclure une
méthode inverse pour le calcul des paramètres du matériau.
En mesurant la vitesse sur les extrémités de la barre et puis en
estimant les paramètres modèles par des itérations
multiples. Sogabe et autres [45] emploient une approche semblable pour
définir un coefficient de propagation qui permet la correction de
l'atténuation et de la dispersion.
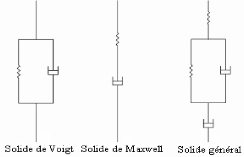
Figure III.7: Modèles des solides
viscoélastiques
III.2.2 Méthodes expérimentales
L'avantage de déterminer les propriétés
du matériau des barres; entrante et sortante expérimentalement
est qu'aucune connaissance antérieure des propriétés du
matériau n'est exigée et ce n'est pas nécessaire de
résoudre les équations de fréquence de Pochhammer et de
Chree. Aussi bien, les corrections basées sur des techniques analytiques
semblent limitées à corriger seulement un peu de distorsion
dispersive.
Gorham et Wu [33] ont suggéré une méthode
pour déterminer expérimentalement les corrections de phase. Leur
méthode exige qu'une série d'essais à l'aide de
projectiles de différentes tailles soit effectuée. Le spectre de
phase pour chaque impulsion est analysé et avec la connaissance de la
manière dont une impulsion idéale propage, la variation de la
phase fondamentale commune à toutes les courbes est
déterminée. Avec la connaissance de la façon dont les
vitesses de phase changent sur la gamme des fréquences, la dispersion de
l'onde peut donc être prévue.
Bacon [46] suggère une méthode
expérimentale pour considérer l'atténuation et la
dispersion dans les barres viscoélastiques. Cette méthode
implique de réaliser un essai sur chaque barre afin de déterminer
le comportement du matériau viscoélastique. Cette méthode,
décrite plus tard, détermine le rapport dispersif
expérimentalement. Bacon et Brun [47] ont étendu cette
méthode pour déterminer le rapport dispersif sur la longueur des
barres non uniformes. Cette méthodologie serait utile si les
extrémités des barres sont chauffées ou si les barres sont
d'impédance non uniforme pour assortir un échantillon. Ce travail
est une prolongation de Lundberg et autres [48] où les
propriétés viscoélastiques du matériau ont
été déterminées en utilisant une technique de
mesure à deux points. Cheng et autres [38] suggèrent une
méthode semblable de détermination du coefficient de propagation.
Au lieu de redéployer les spectres de phase pour déterminer le
déphasage entre deux impulsions, le nombre d'onde est estimé pour
donner une vitesse de phase et un rapport de fréquence raisonnables.
III.2.2.1 Théorie derrière la
méthode expérimentale
En appliquant l'analyse spectrale de l'onde à une
configuration de la barre d'Hopkinson, des équations reliant la vitesse
et la force aux interfaces de la barre peuvent être
dérivées. L'équation d'ondes unidimensionnelle peut
être écrite en terme de contrainte comme:
? ó
( , ) 2 ( , )
x t ? x t
= ñ (3.18)
2
? t
x ?
La déformation est liée au déplacement
par:
? u x t
( , )
å( , )
x t = (3.19)
? t
En écrivant ces équations d'ondes de base dans le
domaine de Fourier:
? 2
ó x ù ñù å x
ù
~ 2 ~
? x 2
( , ) = - ( , ) (3.20)
Où ( , )
ó ~ x ù et å x ù
sont les transformées de Fourier de la contrainte et de la
déformation ~
( , )
respectivement. La fréquence angulaire ù
est reliée à la fréquence par: ù =
2ðf .Pour des milieux linéairement viscoélastiques,
la contrainte est donc liée à la déformation par:
ó ~ x ù = E ù å
x ù
( , ) * ( ) ~ ( , ) (3.21)
Où E * est le module complexe du matériau.
Le coefficient de propagationã =
ã(ù), est défini par:
2
ñ . ù
ã
=
2 (3.22)
E * En utilisant les
équations (3.20), (3.2 1) et (3.22) l'équation unidimensionnelle
d'un mouvement
2
~
axial devient:
? ã å ù
å ù x
( , ) ~
x
+ =
2 ( , ) 0 (3.23)
dx
2
La solution générale de cette équation est
donnée comme:
~ = - +
~ ã x ~ x
x P e N e ã
å ù ù
( , ) ( ) ( )
ù(3.24)
~ ~
Où: ( )
P ( )
ù et N ù sont les transformées
de Fourier des déformations à x = 0 .Elles sont dues
à la propagation des ondes dans les directions de l'augmentation et de
diminution de x respectivement. La vitessev ( , )
~ x ù , et la force normale
F(x,ù), sont alors:
~ = - ? - - x
i ù ~ ã x ?
v( , ) ~
x P e N e ã
ù ( )
ù ( ù )(3.25)
ã ?? ??
|
~ ñ ù
A
F x
( , )
ù = - ã 2
|
2 ? - + x
~ ã x ~
P e N e ã
( )
ù ( )
ù
??
|
?
??
|
(3.26)
|
Le module et l'angle de phase des fonctions exponentielles
complexes x
e -ã et x
eãsont liés à
l'atténuation et à la propagation respectivement. Le coefficient
de propagation ã(ù) est lié au
coefficient d'atténuationá(ù), et
à la vitesse de phase c(ù) par:
ù
ã ù á ù ù á
ù
( ) ( ) ( ) ( )
= + i K = + i (3.27)
c ( )
ù
Où: K(ù) est le nombre d'onde
(fonction impaire) et á(ù) est également
une fonction positive avec : á(0) = 0.
III.2.2.2 Détermination expérimentale du
coefficient de propagation
La méthode suivante est basée sur le travail de
Bacon [46]. La base de la détermination
deã(ù) expérimentalement est
l'équation (3.26). En permettant à une extrémité de
la barre d'être
libre; la force devient zéro (ou bien au moins très
petite que la force à l'endroit de la jauge de déformation).
Lorsque la force à l'extrémité est zéro,
l'équation (3.26) deviennent:
Pe - ã d Ne ã d
~ + ~ = 0 (3.28)
|
~
Où: d est la distance de l'endroit de la jauge de
déformation à l'extrémité libre et P
|
~
et N
|
sont liés
|
|
~
|
|
aux déformations incidente et réfléchie par:
I P et R N
å ~ = å ~ = (3.29)
La fonction de transfert G(ù)peut alors
être définie comme:
~
|
G R e 2
( ) ã
ù -
å ù
~ ( )
= - =
d
å ù
~ I ( )
|
(3.30)
|
Le signe négatif devant le rapport doit compenser le
fait que l'onde réfléchie est inversée. Il devrait
être appliqué à la transformée de Fourier de la
déformation réfléchie en forme rectangulaire. Alors, le
rapport complexe décrit comment l'onde a changé, à raison
de l'atténuation et de la dispersion, sur la distance 2d. Après
qu'un signe négatif soit appliqué à la déformation
réfléchie, le rapport complexe devient:
= è - è = - ã = -
á +
r
G R I
R e e e
i d iK d
( ) 2 ( ) 2(3.3 1)
rI
L'égalisation de la partie réelle et imaginaire
donne:
? r ?
? ?
ln R
? r I ?
á = ? (3.32)
2
d
k
()
? è I
è R
2 d
Ceci est fait pour chaque fréquence. Par
conséquent, le rapport dispersif entre la fréquence et le k est
déterminé.
La détermination du coefficient de propagation permet la
détermination de la vitesse et la
force à l'interface des barres incidente et transmise.
Ceci, alternativement, permet un calcul direct du taux de déformation de
l'équation (2.1). La contrainte peut être calculée à
partir:
F ( t )
ó =
T (3.33)
S A
S
Où les indices inférieurs S et
T se rapportent au spécimen et à la barre transmise
respectivement. La déformation peut être déterminée
en intégrant l'équation (2.1) par rapport au temps comme suit:
å S =? å & S dt (3.34)
La division de la longueur de l'échantillon pour
obtenir le taux de déformation et la section de l'échantillon
pour obtenir la contrainte devrait être faite dans l'ordre de domaine de
temps pour maintenir sa représentation physique.
III.3 Conclusion
Ce chapitre a décrit la base de l'analyse spectrale de
l'onde comme elle s'applique à l'appareil à barre d'Hopkinson. La
compréhension de cette méthode d'analyse de propagation d'onde
permet d'inclure un rapport dispersif qui permet d'analyser le comportement
viscoélastique inhérent à la plupart des polymères.
En plus d'une analyse détaillée d'une méthode
expérimentale, de diverses méthodes analytiques pour la
détermination du rapport dispersif ont été
également discutées.
CHAPITRE IV
CONCEPTION ET REALISATION DU DISPOSITIF
IV.1 Méthode de conception du dispositif
Vu le caractère équivoque et
indéterminé de la synthèse, le travail doit être
systématique pour avoir une meilleure avance dans le travail. Pour cela,
on suit la méthode ainsi:
1. Détermination de la fonction totale.
2. Détermination des fonctions des systèmes
partiels.
3. Proposition des variantes pour chaque fonction partielle.
4. Evaluation et choix de la forme de liaison des
différentes variantes partielles.
IV.1.1 Fonction totale
La fonction totale est de concevoir et réaliser un
dispositif d'essai de compression dynamique à barres de pression
d'Hopkinson divisée. Cette fonction totale peut être
décomposée en des fonctions partielles.
IV.1.2 Fonctions partielles
Tandis qu'il n'y a pas une conception standard universelle pour
l'appareil BPHD, la plupart des appareils d'essai de BPHD partagent cinq
variantes communes [49]:
1/ Deux barres de pression longues de section uniforme de rapport
longueur sur diamètre (LB /DB)
allant de 20 à 100. Les deux barres sont fabriquées du même
matériau. Les
bouts de la barre sont usinés perpendiculairement à
l'axe de la barre pour assurer un bon contact entre le spécimen et la
barre et entre la barre et le projectile.
2/ Roulement et armature d'alignement pour un alignement correct
afin de satisfaire les conditions de propagation d'une onde unidimensionnelle
(1D).
3/ Un lanceur à air comprimé pour propulser un
projectile fabriqué du même matériau que celui des
barres.
4/ Jauges de déformation montées sur les deux
barres pour mesurer la propagation de l'onde de contrainte dans les barres.
5/ Instrumentation associée et le système
d'acquisition des données pour contrôler, enregistrer et analyser
les données de l'onde de contrainte dans les barres.
IV.1.3 Cahier des charges
Le cahier des charges du dispositif à barre de pression
d'Hopkinson divisée marque un jalon dans la vulgarisation de cette
technique.
Le schéma ci-dessous exprime les exigences relatives au
produit; spécification du besoin d'un point de vue technique,
économique et opérationnel comme suit:
· Vitesse de déformation : 102 ÷
104 S-1.
· Vitesse d'impact :
Elle est fonction de la pression d'alimentation.
· Encombrement max : 300×300×4000
mm3.
· Utilisation des jauges extensométriques pour
mesurer la propagation de l'onde de contrainte.
· Instrumentation du
dispositif, commande et traitement
des données par PC.
|
· Délai du projet :
Deux ans.
· Réalisation à l'unité moule.
· Pas de financement officiel.
|
· Utilisation facile
· Montage et démontage aisés
|
|
Spécifications techniques
Spécifications économiques
Spécifications opérationnelles


Schéma IV. 1: Cahier des charges du dispositif BPHD
IV.I.4 Variantes proposées
Ce dispositif est une adaptation de l'ex-dispositif d'essai de
flexion trois points et à appui carrée qu'on a
réalisé en ingéniorat. L'ex-dispositif est illustré
sur la figure IV.I
La proposition des variantes était faite sur la base
des exigences du cahier des charges. En plus de l'expérience
personnelle, on se réfère aux solutions déjà
existantes qu'on adaptera pour satisfaire notre besoin.
Afin de permettre un arrangement systématique des
grands ensembles du dispositif à réaliser, on a
récapitulé les différentes variantes et notions
supérieures suggérées dans le Tableau IV.I.
Pour ne pas rendre le mémoire très exhaustif,
le lecteur est référé à mon mémoire
d'ingéniorat [50] pour plus de détails sur les esquisses des
différentes variantes du tableau de combinaison ainsi que leurs
critiques.
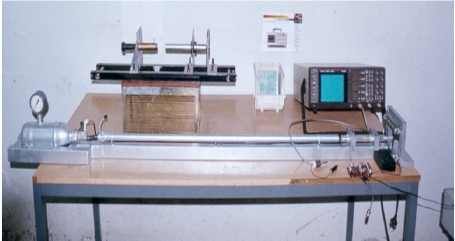
Figure IV. 1: Dispositif d'essai de flexion trois points et
à appui carrée [50]
Notions supérieures
|
Variantes
|
1/ Lancement du projectile
|
1.1/ Propulseur mécanique à ressort 1.2/ Marteau
électromécanique
1.3/ Canon à air comprimé
1.3.1 / A Robinet à boisseau sphérique 1.3.2 / A
déclencheur à fil
1.3.3 / Assisté par électroaimant 1.3.4 /
Assisté par électroaimant 1.3.5 / A cliquet
1.4/ Propulseur à explosif
|
2/ Mesure de la propagation de l'onde de contrainte
|
2.1 / Jauge extensométriques de déformation 2.2 /
Capteur piézoélectrique
2.3 / Capteur piézorésistif
|
3/ Mesure de la vitesse d'impact
|
3.1 / Coupure de faisceaux lumineux 3.2 / Caméra
ultra-rapide
3.3 / Capteurs inductifs ou capacitifs
|
4/ Guidage des barres
|
4.1/ Ensembles de trois roulements déphasés
à 120° 4.2/ Douilles à billes
4.3/ Guidages en V
4.4/ Aéroglisseurs [2]
|
|
Tableau IV. 1: Tableau de combinaison
IV.I.5 Evaluation et décision
Le choix de la solution optimale parmi l'ensemble des variantes
proposées se fera par rapport à la liasse des critères
d'évaluation.
Après avoir étudié soigneusement les
solutions proposées en tenant compte des avantages et
inconvénients, on a opté pour la solution présentée
et discutée ci-après:
IV.I.5.1 Choix des barres
a) Matériau des barres:
Pour le composite PP- Alfa, la contrainte de rupture à
la traction de l'ordre de 10 MPa. Les barres devraient être
dimensionné pour mesurer le comportement dynamique, pas uniquement de ce
composite mais devrait servir à plusieurs matériaux qui ont le
même ordre de résistance.
Les barres de Hopkinson sont avant tout une mesure indirecte
de force (et donc de contrainte). On va donc dimensionner les barres pour
qu'elles mesurent des contraintes allant de 1 à 50 MPa:
ómin =1 MPa
ó
max =50 MPa
ómin <óech <ó
max (4.1)
Les efforts que doivent mesurer les barres sont donc:
Sech ,min ó min <F
< Sech , maxómax (4.2)
Avec Sech ,min, Sech , max sont respectivement
les sections minimale et maximale d'un échantillon testé avec les
barres.
La section maximale sera la section de la barre:
Sech , max = Sb
Pour la section minimale on va prendre que c'est le
cinquième de la section de la barre :
S ech ,min = Sb /5
L'inéquation 4.2 est donc équivalente à:
ómin
5
F
< <ómax
Sb

Soit donc:
ó min
5
< b < (4.3)
ó ó max
Où ób est la contrainte qui
sera induite dans les barres.
Soit Eb le module d'Young de la barre,
l'inéquation 4.2 est maintenant équivalente à:
ómin
5
< Eb b < (4.4)
å ó max
Avec åb est la déformation qui
devrait être mesurée dans les barres.
Or la déformation dans les barres ne devrait pas
être ni trop petite pour quelle soit mesurable ni trop grande et dans ce
cas la barre dépassera sa limite élastique. Soit,
å min <å b
<åmax (4.5)
La limite maximale est donnée par la limite
élastique de la barre :
åmax = åb, elas
La limite minimale est celle des capteurs de
déformations, on peut prendre pour les jauges
å
5
= min 10- Des inéquations 4.4 et 4.5, nous obtenons un
système de deux inéquations:
ó min
5 å
Eb (4.6)
> min
Eb
Ainsi, on obtient un encadrement du module d'Young de la
barre:
ó max å
<(4.7)
max
ó max
å b ,
elas
ó min
< <
E (4.8)
min
b 5å
Le choix des matériaux dépendra de
l'inéquation (4.8). On regarde l'aluminium, le
magnésium, et pour les matériaux viscoélastiques
le Nylon ou le PMMA. Le choix de la section de la barre
dépendra des sections de l'échantillon.
D'après l'inéquation 4.8, on aura:
50
|
< b <
E
|
20 GPa
|
åbelas
,
|
|
Le tableau ci-dessous récapitule les
propriétés mécaniques nécessaires pour faire
l'encadrement du module de Young de la barre:
Matériau
|
E [GPa]
|
åb , elas [%]
|
Re [MPa]
|
Encadrement de Eb
|
Disponibilité
|
Al
|
60-73
|
5-35
|
75-570
|
Non (Eb >20 GPa)
|
Oui
|
Mg
|
40-45
|
2-10
|
90-275
|
Non (Eb >20 GPa)
|
Oui
|
PMMA
|
3.3
|
2-10
|
80-115
|
1.25< Eb<20
|
Non
|
NYLON (PA 6)
|
3
|
90
|
85
|
0.263< Eb<20
|
Oui
|
|
Tableau IV.2: Propriétés des matériaux pour
le choix des barres [56, 57]
åe exprime la déformation
élastique. Pour le PMMA et le Nylon puisqu'ils ont un comportement
viscoélastique, on a pris uniquement la déformation au point de
rendement.
Le retour à zéro du capteur dépend des
déformations maximales appliquées. Suivant les
caractéristiques exigées, on ne devra faire travailler le
métal qu'à 1/5 ou même 1/10 de la limite élastique
à 0,2 % [58].
Si on prend: ómax = 10 MPa alors on
choisit des barres en aluminium.
b) Longueur des barres
Le choix d'une longueur convenable pour les barres exige que les
deux conditions ci- dessous soient satisfaites:
- Le rapport de longueur sur diamètre répond aux
exigences de la théorie de propagation unidimensionnelle
- La longueur de la barre est au moins deux fois celle de
l'impulsion compressive produite pendant l'impact.
La plupart des articles suggèrent que la barre aie un
rapport de longueur sur diamètre au moins de dix. La longueur de la
barre de pression affecte combien de déformation un spécimen peut
subir, puisque la déformation est liée à toute la
durée d'impulsion, qui est directement liée à la longueur
de la barre de pression. Pour pouvoir mesurer les impulsions incidente et
réfléchie indépendamment, la longueur de la barre doit
être supérieur à deux fois la longueur de l'impulsion
d'impact. Typiquement les barres de pression sont de 60 pouces ou plus grands
[60].
Les barres utilisées sont de diamètre 20 mm.
Pour tenir compte de l'encombrement maximal permis au cahier des charges
fonctionnel, on prend une longueur de 60' (1524 mm) pour la barre entrante.
Toutefois, une longueur de 1000 mm est suffisante pour capter l'onde
transmise.
IV.I.5.2 Propulsion du projectile
On a choisi le canon à air comprimé du fait
qu'il permet de développer des vitesses d'impact typiquement de 2.5 to
40 m/s. De plus, il est facile à réaliser par assemblage de
composants standard.
IV.I.5.2.1 Système de
déclenchement
Vu sa vitesse de réponse acceptable et la
possibilité d'être commandé par ordinateur, le canon
à air comprimé à déclenchement assisté par
électrovanne AURA 10073 a été jugée comme
étant le système de déclenchement le plus adéquat.
Le pilotage du dispositif (déclenchement et remise en position initiale
du projectile) est assuré par PC à l'aide du
programme BPHD par l'intermédiaire de la carte
d'interface de la figure 3 qu'on a conçu sous PCB 123.
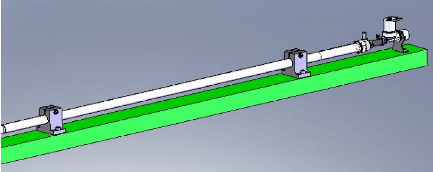
Figure IV.2: Canon à air comprimé (Dessin
SolidWorks2007 SP2.2)
a) Commande d'un relais par un signal
logique
Le but est de commander un relais à l'aide d'une
sortie du port parallèle. On ne peut pas brancher directement le relais
sur cette sortie, car il consomme trop de courant. Il faut donc mettre un
transistor qui va servir d'interrupteur commandé
électriquement.
On va calculer la valeur de R. Notez que cette
résistance est obligatoire. En effet, la jonction base - émetteur
se comporte comme une diode. C'est à dire que Vbe_max = 0.7V environ.
Sans cette résistance, on forcerait Vbe à 5V, ce qui aurait pour
effet de griller le transistor et/ou la sortie de la porte logique.
Voici le schéma que nous allons étudier.
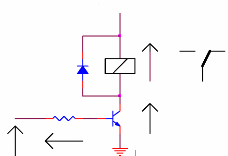
+VCC=+5V
REL
REL
Ure l
D
R
T
Vce
UR
Ve
Masse
Figure IV.3: Commande d'un relais (Schéma Orcad)
Données
· T : transistor NPN, ß = 320, Vce_sat = 0.2V,
Vbe_sat = 0.7V, Vce_max = 30V.
· REL : relais, Rrel = 103 Ohms, relais prévu pour
être alimenté en 5V.
· D : diode de roue libre. Cette diode sert uniquement
à protéger le transistor lorsqu'on le bloque (supprime le pic de
tension du au relais).
· R : ce qu'on cherche.
· Vcc = +5V.
· Ve vaut 0 ou 5V. Lorsque Ve = 0, on veut que le relais
ne soit pas alimenté (soit Urel = 0), et lorsque Ve = 5V, on veut que le
relais soit alimenté (soit Urel = 5V environ).
Résolution du problème
Vérification pour Ve = 0
Si Ve = 0, alors Vbe = 0 et Ib = 0 (La jonction
base-émetteur est bloquée). Donc, le transistor est
bloqué.

Ic = Ie = 0 Urel = Rel x Ic = 103 x 0 = 0.
> On a bien obtenu ce qu'on voulait.
> Remarque, dans ce cas la, Vce = Vcc = 5V (C'est bien
inférieur à Vce_max).
Calcul de R pour Ve = 5V
Calcul de Ic
Vcc = Vce + Urel.
Or il faut que le transistor soit saturé. Donc, Vce =
Vce_sat. D'autre part, Urel = Rrel x Ic. Donc: Vcc = Vce_sat + Rrel x Ic.
Soit: Ic = (Vcc - Vce_sat) / Rrel = (5 - 0.2) / 103 = 0.047A.
Calcul de Ib_min
Ib_min = Ic / ß = 0.047 / 320 = 0,147mA.
On prend un coefficient de sécurité de 1.5 pour
être sur que le transistor sera bien saturé: Donc: Ib _sat =
Ib_min x 1.5 = 0,22mA.
Il faut se souvenir que la jonction base-émetteur se
comporte comme une diode. Ve = Ur + Vbe. Or Vbe = Vbe_sat = 0.7V (diode).
Ve = R x Ib _sat + Vbe_sat.
Soit: R = (Ve - Vbe_sat) / Ib_sat = (5 - 0.7) / 0.00022 = 19,5
K?. On prend : R= 15 K?.
Alors, on a donc réalisé un "interrupteur"
commandé électriquement.

Lorsque Ve = 0, le transistor est bloqué et le relais
n'est pas alimenté.
Lorsque Ve = 5V, Ib est un petit courant de commande qui laisse
passer un grand courant entre le colleteur et l'émetteur. Le relais est
alimenté.
IV.I.5.3 Instrumentation associée à BPHD et
acquisition des données
a) Choix du capteur
Il existe plusieurs types de jauges de déformation en
fonction de :
- l'environnement (température, allongement maximal,
nombre de cycles) ; - les conditions de mise en oeuvre (commodités de
collage et câblage) ;
- la nature physique de la structure (coefficient de dilatation
de la structure) ; - la nature géométrique de la structure
(dimensions et causes de contraintes) ;
- l'instrumentation (matériel à utiliser pour le
conditionnement, l'amplification
et l'acquisition des données.)
Nous avons choisi une jauge unidirectionnelle (Figure IV.4) de
marque Vishay® MicroMeasurement de type CEA - 13- 062WT- 350 dont les
caractéristiques étaient les suivantes [58] :
- CEA: jauges en constantan encapsulées dans du
polyamide, avec des sorties « intégrées »
plaquées de cuivre afin de souder directement les fils de liaison sans
passer par des cosses relais. « E » : trame nue sur support souple et
robuste de polyamide (usage général), « A » : trame en
alliage de constantan autocompensé en température ;
-13 : Nombre d'autocompensation en température
correspondant.
- 062 : Longueur de grille en 1/1000° de pouce (1 pouce =
0,0254 m) ; - WT : Géométrie de la grille ;
- 350 : Résistance en ohms de la jauge ;
- Facteur de jauge : 2,14.

Figure IV.4: Jauge de déformation de type
unidirectionnelle (Vishay micro measurement).
En plus des
déformation (CEA
face externe de la b
formations,
critères ci - dessus,
notre choix est porté sur l -1 3-062W
T -350) car elles ne posent pas
éromètres p
iézoélectriques et
piézorésistifs.
détriment des accél
La jauge de
est primor d
déformat ion est
collée sur la
collage
sein du
iale pour l a qualité d' enregistrement des dé
es jauges
extensométriques de un problème
de fixation au
arre. Cette étape de elle est
réalisée au
laboratoire LMNM.
s en aluminium est fait à l'aide
du cyanoacrylate car
Selon l'instruction de service de la jauge
une des colles suivantes M-bond 200, M
.
b) Collage des jauges
e collage
l'aide de l'
Ldes jauges sur les
barre on n'a pas trouvé la colle
adéquate sur le marché.
CEA-13-062WT-350, le collage se fait à
Bond AE 10/15, GA-2, M-Bond
600 ou M-Bond 610
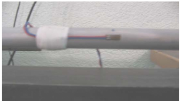
Figure IV.5: jauge
CEA-13
collée sur la barre du
dispo
-062 WT-3 50
sitif BPHD
L e collage se fait en
conformité avec l e catalogue A-1 10-1
-F [59] de micro measure ment comme indiqué sur la
figure IV.6.
|
A n de la surface
près préparatio
et utilisation des produits
spéciaux, la mise en
oeuvre, l'emploi de la colle M200 est rapide
et simple.
|
Positionner la jauge avec
l'adhésif
|
Appliquer le catalyseur sur la
jauge
|
|
Asur la structure ppliquer la colle
|
|
|
|
Installer la jauge en pressant
avec le pouce
|
|
|
Enlever l'adhésif recouvrant la jauge
|
Fi gure IV.6: Etapes de co llage d'une jauge à l'aide de
M 2 00
c) Pont d'extensométrie
Pour notre
pont car on travaille dans
un laboratoire compensation thermique. La
jauge (Rg) e
e montag
L e
de la jauge donc
de
capteur no us avons c hoisi
de n' utiliser qu' une jauge
montée en
or le mon tage en de mi de
pont est meilleu r st collée s
ur la généra trice de la
barre (Figur e
en quart d e pont de Wheatstone
permet de mesurer la
déformatio n la barre d
ans le sens longitudina
l.
quart de
pour la IV.5). (ìm/m)
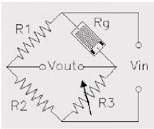
Figure IV.7: Montage 1/4 de pont
de Wheatstone
valeurs des résistance s, si la
L'équilibrage du pont
est obtenu, en fonction des
condition ci-après est
satisfaite :
~

Rg
R3
(4.9)
R1
R2
Avant de f aire un essa
i, il faut éq uilibrer le p
ont en jouan t sur la val eur de la ré sistance variabl
e R3 pour s atisfaire la
condition p récédente.
t quelque s
er un rapp o
e à mém
ation son t
férentiels d
s les moy e
ion à base DD (Naval à annuler
'instrume ntation
|
urs instanc
|
es, les signa ux enregis trés par les
|
d) Amplificateur d
ans plusi
D e
a mplitude, typiqueme n
s millivolt s peut don n
scilloscop e numériq u
ificateur d'instrumen t
faible quelque dans l'o
préampl problèmes
liés aux
signaux di f
'on n'a p a
u fait qu
D
l'amplificateur
d'instrumentat
développé et
certifié à NSWC
quatrième étage de
LM837 se rt
jauges de déformation
ont une millivolts [22]. Essayer de traiter
un signal de rt signal-bruit très bas puisque le bruit
électronique oire est sûr de
contribuer au signal. Ainsi, des
généralement utilisés
pour ai der à allé ger les e faible grandeur.
ns pour acheter un
préamplificateur, on a
réalisé de LM837 de la figure IV.8. Le
préamplific ateur est Surface Warfare
Center Dahlgren Division) [22]. Le la
dérive de zéro (offset).
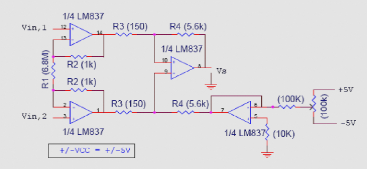
Figure IV.8: Schéma Orcad du préamplificateur
modifi é à NSWCDD [22] Le gain du
préamplific ateur est donné par :
|
G = (1 +
|
R2) (R4
2 R1) R3)
|
(4.10)
|
IV.I.5.4 Calcul d e la vitesse d'impact
On utilise un système
de mesure à coupure de
faisceaux lumineux
réalisé par un étudiant
fin de cycle. Pour mener à
bien notre travail, on a
modélisé le système
propul seur. La
vitesse d'impact en fonction
de la pression d'alimentation est
donné e par un code de
simulati on sous
MATLAB(Annexe A).
IV.I.6 Schéma technique du dispo sitif
Le schéma technique
du dispositif à barre de pression
d'Hopkinson divisée (BPHD) est illustré sur la
figure IV.9
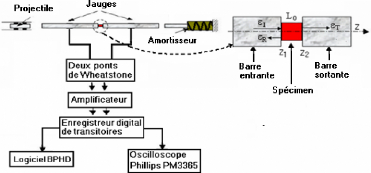
Figure IV.9: Dispositif à barre de pression d'Hopkin son
divisée (BPHD)
IV.I.7 Principe de fonctionnement
D'abord, l'étalonnage du dispositif BPHD est
nécessaire pour l'installation d'un nouvel essai, ou s'il y a un
changement des barres, ou un changement des jauges de contrainte montées
là-dessus. La contrainte mesurée par les jauges de contrainte
devrait représenter les états corrects de
déformation/contrainte dans la barre. Un essai d'étalonnage
éliminera ainsi tout effet de petit désalignement des jauges, ou
l'effet des adhésifs employés pour coller les jauges sur la
surface de la barre. Deux essais différents sont habituellement
réalisés: Le projectile percute la barre entrante et la barre
sortante séparément "des barres à part "; et le projectile
percute les deux barres couplées en absence du spécimen " barre
ensemble". Le premier essai détermine les facteurs de correction de la
déformation. Le deuxième détermine le facteur de
transmission de la barre ou le facteur de correction de la contrainte.
Ensuite, les faces du spécimen doivent être
polies pour qu'elles soient bien parallèles. Ainsi, On intercale le
spécimen entre la barre entrante et la barre sortante tout en lubrifiant
les interfaces barres/spécimen pour minimiser les frottements aux
interfaces. En fonction de la vitesse d'impact désirée, on
règle la pression d'alimentation du compresseur. Après avoir
entré les grandeurs physiques et géométriques de
l'échantillon ainsi que les paramètres d'essai au programme BPHD,
on lance le projectile directement à l'aide du programme BPHD par le
biais de la carte d'interface illustrée sur la figure IV. 13. Ainsi le
projectile lancé percute la barre entrante qui sollicite le
spécimen en compression contre la barre sortante. Les signaux des ondes
incidente, réfléchie et transmise seront captés par les
jauges collées sur les deux barres. Le conditionnement se fait en un
quart de pont de Wheatstone; l'amplification du signal se fait par le circuit
de la figure IV.8. D'emblée, les signaux amplifiés des jauges
sont mémorisés et visualisés sur un oscilloscope
numérique à mémoire Philips PM3356- 100Méch/s pour
savoir leur ordre de grandeur. Ensuite, on utilise la carte d'interface
"PCL818HG" pour acquérir les signaux sur PC. La PCL818HG s'enfiche sur
le port ISA (8 bits) et les nouveaux PC ne comporte pas ce port. Donc, on
était obligé à faire l'acquisition sur un Pentium II.
Ensuite, on exporte les fichiers des données de la PCL8 18HG à un
ordinateur plus performant (P IV: 3GHZ/512MO/80GO/32bit) pour les traiter
à l'aide du programme BPHD modifié.
Le programme SHPB est élaboré dans sa version
originale anglaise en VC++ sous Windows 95 par CHRISTOPHER [2]. On a traduit le
programme en français sous le nom BPHD. Il est rendu plus convivial avec
sa nouvelle interface au quelle, on a ajouté les options
de la commande du dispositif par PC. Ainsi, le
SHPB est rendu compatible avec Windows XP.
Figure IV.10: Spécimen
intercalé entre deux
aluminium (606 1)
en PA6 Figure IV. 11:
Vues d'un sp écimen en
barres en Nylon (PA6)
IV.2 Résultats
) réalisé et son
e disposi
L tif à barre de
pression d'Hopkinson
divisée (BPHD
igure IV. 1 2).
instrumentation
associée sont illustrés sur la
figure ci-dessous (F

Figure IV.1 2: Photo du dispositif BPHD réal isé
avec l'in strumentati on associée
double
e l'interface de pilota
lenchement et la remi
principe
ation d'un premier p
Deux relais sont
La figure IV. 13 illustr
fonctionnalité; Le déc
est basé sur la satur
utilisés; le
ge du dis po
se en posi
ti
transistor p our assur
er
our actionn er l'électr
o
sitif BP HD. Elle as sure
une on initial e du projec tile. Son la com
mutation d' un relais. vanne du canon
à air et le
deuxième pour mettre en marche la pompe à vide.
Deux portes logiques XOR sont utilisées pour éviter les
problèmes relatifs au démarrage et arrêt du PC.
Figure IV. 13: Carte de pilotage de
BPHD
Figure IV.14: Circuit imprimé de la carte de
pilotage -coté cuivre
Figure IV.15: Circuit imprimé de la carte de pilotage -
coté composants
IV.2.1 Commande de l'électrovanne et de la pompe a
vide sous VC++
IV.2.1.1 Compatibilité avec XP
Le niveau de sécurité du pare feu de Windows XP
est élevé. IL ne permet pas d'avoir accès aux ports du PC
en mode utilisateur. Alors, il faut utiliser un DLL qui permet de changer le
mode utilisateur en mode noyau
InpOut32 est un fichier DLL (Dynamic Link Library) qui peut
envoyer des données au port parallèle et qui peut recevoir des
données du port parallèle. Le fichier et le code source peuvent
être téléchargés à partir du site:
http://logix4u.net. Avec ce DLL,
on utilise les fonctions Inp32 () et Out32 () au lieu de _inp() et _outp().
Pour convertir notre projet en un programme permis par XP, on
utilise le dossier InpOut32.DLL. Voila comment utiliser ce DLL dans VC++:
1. Ajouter ces trois lignes dans le dossier CSHBDoc.cpp
après les directives du préprocesseur.
#define portaddr 0x378 // Adresse du bus de données
short _stdcall Inp32 (short portaddr);
void _stdcall Out32(short portaddr, short datum);
2. Changer _ inp() en Inp32() et _outp() en Out32() dans le
programme.
3. Copier le fichier DLL (inpout32.dll) et le fichier de la
bibliothèque (inpout32.lib) obtenu en compilant le code source
disponible à
http://logix4u.net au répertoire
du projet.
4. À partir du menu Project, choisir
Settings, aller à Link, dans Object/ library
modules, écrire inpout32.lib.
5. Maintenant votre programme devrait fonctionner sans aucune
erreur.
Pour éviter les problèmes relatifs au
démarrage et à l'arrêt du PC, on a exploité deux
portes logiques XOR parmi les quatre du circuit CD4030CN.
Du fait qu'on commande deux organes, donc on aura besoin de
quatre broches. Il suffit de les choisir parmi les huit broches du registre de
données de LPT1 (D0, D1, D2, D3, D4, D5, D6 et D7). Pour notre cas, on
prend par exemple :

D0 et D3 pour commander la pompe à vide.
D5 et D7 pour la commande de l'électrovanne.
|
D7
|
D5
|
D3
|
D0
|
Y1= ?~0?~?~?~?~D3+D0?~3?~?~?~?~
|
Y2=?~5?~?~?~?~D7+D5?~7?~?~?~?~
|
|
0
|
0
|
0
|
0
|
0
|
0
|
|
0
|
0
|
0
|
1
|
0
|
1
|
|
0
|
0
|
1
|
0
|
0
|
1
|
|
0
|
0
|
1
|
1
|
0
|
0
|
|
0
|
1
|
0
|
0
|
1
|
0
|
|
0
|
1
|
0
|
1
|
1
|
1
|
|
0
|
1
|
1
|
0
|
1
|
1
|
|
0
|
1
|
1
|
1
|
1
|
0
|
|
1
|
0
|
0
|
0
|
1
|
0
|
|
1
|
0
|
0
|
1
|
1
|
1
|
|
1
|
0
|
1
|
0
|
1
|
1
|
|
1
|
0
|
1
|
1
|
1
|
0
|
|
1
|
1
|
0
|
0
|
0
|
0
|
|
1
|
1
|
0
|
1
|
0
|
1
|
|
1
|
1
|
1
|
0
|
0
|
1
|
|
1
|
1
|
1
|
1
|
0
|
0
|
Tableau IV.3: Tableau logique pour commander
l'électrovanne et la pompe à vide
La sortie Y1 sert à commander la pompe à vide.
Néanmoins, la sortie Y2 est pour commander l'électrovanne.
Les cas en rouge sont à éviter car ils
entrainent un conflit; la pompe à vide et l'électrovanne
fonctionnent simultanément. Le vert correspond aux cas du bon
fonctionnement de l'électrovanne tandis que les cas adéquats pour
actionner la pompe à vide sont en jaune.

ELECTROVANNE:
Hormis D0, D3, D5 et D7, le reste des broches du registre de
données sont mises à zéro. Les valeurs en binaire
(D7D6D5D4D3D2D1D0) à introduire au port parallèle sont converties
en hexadécimal. Selon le tableau IV.4, on a quatre possibilités
pour commander l'électrovanne; 0x01, 0x08, 0xA1 ou
0xA8.
|
D7
|
D6
|
D5
|
D4
|
D3
|
D2
|
D1
|
D0
|
En hexadécimal
|
|
|
|
|
|
|
|
1
|
0x01
|
|
|
|
|
1
|
0
|
0
|
0
|
0x08
|
|
1
|
0
|
1
|
0
|
0
|
0
|
0
|
1
|
0xA1
|
|
1
|
0
|
1
|
0
|
1
|
0
|
0
|
0
|
0xA8
|
Tableau IV.4: Codes de commande de l'électrovanne.
La commande de l'électrovanne est assurée par la
fonction OnTestRun () qui appartient à la classe CCSHBDoc. On introduit
l'une des quatre valeurs données dans le tableau IV.4 à
l'instruction Out32.
void CCSHBDoc: :OnTestRun()
{
// Selon l'ouvrage : Guide pratique _Interfaçage
numérique, p.15:
// Une broche mise au niveau logique "1" fournit:
// Une tension fixe comprise entre 2.4V et 3.6V
// Un courant sortant maximum de 0.4 mA
/* _outp (Port, databyte);
unsigned short Port=0x0378;// 0x0378 est l'adresse de LPT1
int databyte =0x04; // broche N°3 (D1-->2.9V tension
pratique)*/
Out32 (0x378, 0x01); // 0x01, 0x08, 0xA1, 0xA8
Sleep (800); /* Sleep(800) maintient l'electrovanne sous
tension
Pendant 800 ms.*/
Out32 (0x378, 0); // Remise à zéro du port
parallèle.
}

POMPE A VIDE:
Pour commander la pompe à vide, il suffit d'introduire
à l'instruction Out32 l'une des valeurs ainsi: 0x20, 0x29, 0x80
ou 0x89. La fonction de commande est OnTestRemise().
|
D7
|
D6
|
D5
|
D4
|
D3
|
D2
|
D1
|
D0
|
En hexadécimal
|
|
|
1
|
0
|
0
|
0
|
0
|
0
|
0x20
|
|
|
1
|
0
|
1
|
0
|
0
|
1
|
0x29
|
|
1
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0x80
|
|
1
|
0
|
1
|
0
|
1
|
0
|
0
|
0
|
0x89
|
Tableau IV.5: Codes de commande de la pompe à vide
void CCSHBDoc: :OnTestRemise()
{
Out32 (0x378, 0x20); // 0x20, 0x29, 0x80 ou 0x89 Sleep (1000);
Out32 (0x378, 0);
}

Figure IV. 16: Conditionneur à deux voies*
*1/4 de pont de wheatstone & préamplificateur par
voie
Figure IV. 17: Circuit imprimé du conditionneur-
coté cuivre
Figure IV. 18: Circuit imprimé du conditionneur-
coté composants
Les composants utilisés dans la carte de commande et dans
le conditionneur sont respectivement indiqués sur les circuits
imprimés-coté cuivre des figures IV. 14 et IV. 17.
IV.2.2 Analyse des données
La partie principale de rédaction des données du
programme est l'algorithme d'analyse. Il utilise une série de fonctions
pour appliquer la méthode analytique des chapitres II et III. Des
descriptions détaillées des algorithmes utilisés sont
décrites par Christopher[2].
Pour initialiser la routine d'analyse, une fenêtre de
dialogue, représentée sur la figure IV. 19, récapitule les
données d'entrée. Cette figure énumère les noms des
dossiers de données brutes et d'étalonnage, le nom et les
dimensions de l'échantillon. Les champs sur le fond de la fenêtre
permettent le choix d'une analyse conventionnelle de la barre de Hopkinson
divisée ou de l'analyse de Fourier. La méthode conventionnelle
utilise les équations du chapitre 2. Si la méthode de Fourier est
choisie (Par défaut), les options d'appliquer un filtre de
fréquence ou d'utiliser la fréquence de Nyquist deviennent
disponibles. Ces valeurs sont expliquées en détail par
Christopher [2].
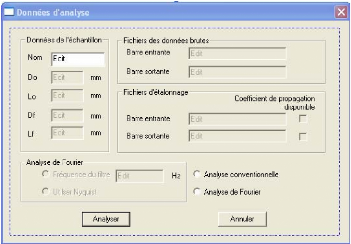
Figure IV.19: Boite de dialogue des données d'analyse
La figure IV.20 montre une capture d'écran du programme
BPHD après traitement des données.
Début
Manipulation
conventionnelle de
l'onde
Oui
Introduction des données de la barre entrante
Prétraitées
Manipulation de
Fourier
Non
Manipulation
conventionnelle de
l'onde
Oui
Introduction des données de la barre sortante
Prétraitées
Manipulation de
Fourier
Non

Fin
Analyse de Fourier
Calcul:
Contrainte, taux de déformation et déformation
à partir des équations 3.33, 2.21, 3.34
Soustraire les vitesses pour le taux de déformation,
Initialiser le tableau pour la contrainte
IFFT
Oui
Données valides de :
Echantillon, Déformation, Vitesse et Force
Non
Calcul:
Contrainte, déformation et taux de déformation
à partir des équations 2.19, 2.25, 2.26
Oui
Analyse conventionnelle
Schéma IV.2: Organigramme de traitement des données
de l'essai BPHD
Du programme
principal
Non
Calculer la valeur théorique du nombre d'onde à
partir des équations 2.13 et 3.15 à des fréquences
discrètes obtenues par le taux d'échantillonnage des
données incidentes.
? Coefficient de propagation est inclus dans le fichier
d'étalonnage
Oui
Taux d'échantillonnage et le nombre de points pour les
données brutes et les données du coefficient de propagation sont
égaux
Non
Interpoler les données brutes; ajoutant ou enlevant des
points selon les besoins pour forcer des données brutes à
assortir le taux d'échantillonnage et la longueur des données de
la barre
Oui
Changer le voltage en déformation
Appliquer la FFT
sur les données
Changer la forme

Propager l'onde
Changer la forme

Calculer la vitesse à partir de
l'équation
3.25
Calculer la force à partir de
l'équation
3.26
|
Vers le programme
principal
|
Schéma IV.3: Organigramme de manipulation de Fourier
Convertir le voltage en déformation

Calculer les forces à partir de
l'équation
2.16
Calculer les vitesses à partir des
équations
2.22 et 2.23
|
Vers le programme
principal
|
Schéma IV.4: Organigramme de la manipulation
conventionnelle
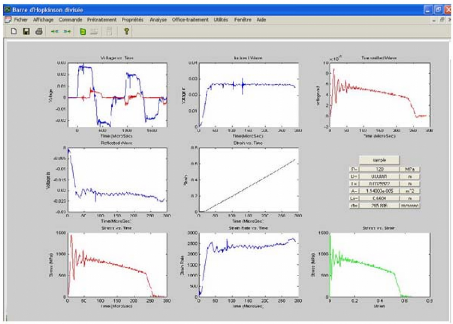
Figure IV. 17: Capture d'écran du Programme BPHD
CONCLUSION ET PERSPECTIVES
L'objectif principal de ce travail est de concevoir et
réaliser un dispositif à barres de pression d'Hopkinson
divisée (BPHD); assisté par PC.
Le dispositif expérimental a été
construit. Un travail important a été fait sur tous les niveaux
du dispositif pour satisfaire les approches de validité de l'essai;
décrites au point II.5.
Un guidage précis est assuré avec l'emploi des
douilles à billes KH20-30. Un soin particulier est donné à
l'usinage des bouts des barres pour avoir un bon contact aux interfaces
barre-spécimen. La lubrification des interfaces minimise l'inertie
radiale.
Le pilotage du dispositif (lancement et remise en position
initiale du projectile) est assuré par PC à l'aide du programme
BPHD grâce à la carte d'interface qu'on a conçu sous PCB
123. La carte commande une électrovanne qui gère le canon
à air comprimé.
Les barres sont instrumentées par des jauges
extensométriques (CEA-13-062WT-350) en un quart de pont de Wheatstone.
Du fait qu'on n'a pas un conditionneur amplificateur, on a
réalisé un amplificateur d'instrumentation à base de LM837
de la figure IV.8 pour forcer le signal de sortie du pont à atteindre la
gamme dynamique de l'oscilloscope PM3365. Il permet l'amplification d'une
tension continue. Mais, l'emploi des résistances courantes du
marché dont la tolérance est 5%, les fils de connexion non
blindés, la tension d'alimentation de +/- 10 V ainsi que le montage en
1/4 de pont de Wheatstone ont bruité le signal. Dans ces conditions,
l'amplificateur n'est pas stable à point qu'on arrive à annuler
la dérive de zéro (offset) .
Le programme MFC-VC++6.0 modifié, est très
convivial avec sa nouvelle interface attirante et sa compatibilité avec
Windows XP. En plus, La commande par PC du lancement et remise en position
initiale du projectile est réalisée avec succès. Comme ca,
il assure les fonctionnalités des programmes commerciaux y compris la
correction de l'atténuation et de la dispersion du signal.
Suite au caractère pluridisciplinaire du sujet, la
limitation des moyens disponibles, la nouveauté du projet au niveau
national et la limitation de la durée du projet entamé, On n'a
pas pu le contourné dans les meilleurs délais. Alors, on
suggère quelques perspectives et tâches à compléter
aux futurs chercheurs algériens désirant de travailler sur le
domaine des barres d'Hopkinson.
1- Acheter ou réaliser un vélocimètre pour
la mesure de la vitesse du projectile.
2- Avoir un module de conditionnement et d'amplification avec
deux entrées différentielles (voir chapitre I) ou au mois
prévoir un montage en un demi de pont avec une tension d'alimentation de
+/- 5V (Directive de Steven David Swantek [22]).
3-Avoir une carte d'acquisition Plug and Play (ou bien une
carte - à trois entrées différentielles - compatible avec
les nouveaux PC) ayant au préférable un gain en bande passante
=100MHZ.
4- Utiliser la colle adéquate des jauges et les fils
convenables.
Il est vivement recommandé d'exploiter le dispositif
réalisé en travaux pratiques comme premier pas vers la
généralisation de son usage aux travaux de recherche nationaux.
Ensuite, son exploitation en industrie nationale pour l'amélioration des
performances des matériaux de construction.
REFERENCE S
BIBLIOGRAPHIQUES
[1] YUXUAN L., ZHONGQIN L., AIQIN J. and GUANLONG C., «
Experimental study of glass-fiber mat thermoplastic material impact properties
and lightweight automobile body analysis. », Journal of Materials and
Design, Vol. 25, pp.579-585 (2004).
[2] CHRISTOPHER S., «Spectral analysis of wave
propagation through a polymeric Hopkinson bar. », Master thesis of applied
science in mechanical engineering, Waterloo, Ontario, Canada (2001).
[3] HOPKINSON B., « A method of measuring the pressure
produced in the detonation of high explosives or by the impact of bullets.
», Philosophical Transactions of the Royal Society of London, Vol. A213,
pp. 437-452 (1914).
[4] DAVIES R.M., « A critical study of Hopkinson pressure
bar. », Philosophical Transactions of the Royal Society of London, Vol.
A240, N° 821, pp. 375-457 (1948).
[5] KOLSKY H., « An investigation of the mechanical
properties of materials at a very high rate of loading. », Proceedings of
the Physical Society of London, Vol. B62, pp.676-701 (1949).
[6] LEWIS J.L. and Campbell J.D., « The development and use
of a torsional Hopkinson bar apparatus. » Experimental Mechanics, Vol.12,
pp.520-524(1972).
[7] VICTOR M.F.E. and ARUN S., « Fabrication,
characterization and dynamic behavior of polyester/TiO2 nanocomposites. »,
Materials Science and Engineering, Vol.A361, pp.358-366 (2003).
[8] SYLVANUS N.N., DAVID H. and PIYUSH K.D., « Dynamic
mode II delamination fracture of unidirectional graphite/epoxy composites.
», Composites, Part B, Vol.34, pp.303- 3 16(2003).
[9] JIALIN T. and C.T. S., « Dynamic compressive strength
of polymeric composites. », International Journal of Solids and
Structures, Vol.41, pp.321 1-3224 (2004).
[10] MARTIN H., ARUN S., ARJUN T. and QINGLI D.,
«Mechanical behavior of recycled asphalt material under dynamic loading
conditions. », URITC Project No. 536186 (2005).
[11] ARNAUD B., « Évaluation des
propriétés de matériaux viscoélastiques Par barres
de KOLSKY.», Thèse de Doctorat, Université Bordeaux
1(2000).
[12] CASEM D.T., FOURNEY W. and CHANG P., « Wave
separation in viscoelastic pressure bars using single-point measurements of
strain and velocity. », Polymer Testing, Vol.22, pp.155-164 (2003).
[13] GOMEZ D.R.T., BARBERO E., ZAERA R. and Navarro C.,
« Dynamic tensile behaviour at low temperature of CFRP using a split
Hopkinson pressure bar. », Composites Science and Technology, Vol. 65, pp.
61-71(2005).
[14] ZHOUHUA L. and JOHN L., « Strain rate effects on the
thermomechanical behavior of polymers. », International Journal of Solids
and Structures, Vol.38, pp.3549-3562 (2001).
[15] RAMZI O., MARIE-N B., PIERRE C. et GERARD G., «
Séparation et reconstruction des ondes dans les barres élastiques
et viscoélastiques à partir de mesures redondantes. »,
C.R.Acad.Sci., Paris, t.329, Série II b, pp.369-376(2001).
[16] BARBER J.R., « Intermediate mechanics of materials.
», McGraw-Hill, Inc., New York (2001).
[17] SEAN S.K. and JULIE B.R., « Linear poroelastic
cancellous bone anisotropy: Trabecular solid elastic and fluid transport
properties. », Journal of Biomechanical Engineering, Vol. 124, pp.521
-526(2002).
[18] XIANGYANG H. and AL, «Dynamic mechanical properties of
whisker/PA66 composites at high strain rates. », Polymer, Vol.46,
pp.3528-3534(2005).
[19] ZUKAS J.A., NICHOLAS T, SWIFT H.F., GRESZEZUK L.B. and
CURRAN D.R., « Impact dynamics. », Krieger Publishing Company,
Florida (1992).
[20] BICKLE L.W., « An introduction of use of strain gages
for measurement of propagating strain wave. », Sandia Laboratories Report,
Albuquerque, New Mexico (1970).
[21] BURSTOW C.G., CORELL M.C. and ROGERS A.C., «
Mechanisms of Dislocation Motion in 7075-T73 Aluminium Alloy at Strain Rates of
105 s-1. », Materials at High Rates of Strain,
Institute of Physics, Bristol, CT (1989).
[22] STEVEN D.S., « An Optical Method of Strain
Measurement in the Split Hopkinson Pressure Bar. », Master of Science
Thesis in Mechanical Engineering, Blacksburg, Virginia, USA (2000).
[23] RAVICHANDRAN G. and SUBBASH G., « Critical
appraisal of limiting strain rates for compression testing of ceramics in a
split Hopkinson pressure bar. », J Am Ceram Soc, Vol.77 (1),
pp.263-7(1994).
[24] GRAY III G.T. and BLUMENTHAL W.R., « Split Hopkinson
Bar testing of soft materials. », Los Alamos National Laboratory,
No.LA-UR-99-4878(1 999).
[25] YANG L.M., SHIM V.P.W., « An analysis of stress
uniformity in split Hopkinson bar test specimens. », International Journal
of Impact Engineering, Vol.31, pp.129-150(2005).
[26] RAZVAN R., « Modeling of Shock Wave Propagation and
Attenuation in Viscoelastic Structures. », Doctorate of Philosophy Thesis
in Mechanical Engineering, Blacksburg, VA (1999).
[27] ZHAO H. and GRAY G., « On the use of SHPB
techniques to determine the dynamic behavior of materials in the range of small
strain. », Int J Solids Struct, Vol.33 (23), pp.3363- 77 (1996).
[28] GONG J., MAVIN L. and JENKINS D., « Dispersion
investigation in the split Hopkinson pressure bar. », J Engng Mater
Technol, Vol.1 12, pp.309-14(1990).
[29] CHAPRA S., CANAL R., « Numerical Methods for
Engineers. », 2nd Edition, McGrawHill, New York (1988).
[30] PRESS W.H., TEUKOLSKY S.A., VETTERLING W.T. and FLANNERY
B.P., « Numerical Recipes in C. », 2nd Edition, Cambridge University
Press, Cambridge (1992).
[31] DOYLE J.F., «Wave Propagation in Structures-An FFT
Based Spectral Analysis Methodology. », Springer-Verlag, New York
(1989).
[32] FOLLANSBEE P.S. and FRANTZ C., « Wave Propagation in
the Split Hopkinson Pressure Bar. », Journal of Engineering Material
Technology, Vol.105, pp. 61-66(1983).
[33] GORHAM D.A. and WU X.J., « An Empirical Method for
Correcting Dispersion in Pressure Bar Measurements of Impact Stress. »,
Measurement and Science Technology, Vol. 9, pp. 1227-1232(1996).
[34] POCHHAMMER L., « On the Propagation Velocities of
Small Oscillations in an Unlimited Isotropic Circular Cylinder. », Journal
Reine Angewandte Mathematic, Vol. 81, pp. 324-336(1876).
[35] CHREE C., « The Equations of an Isotropic Elastic
Solid in Polar and Cylindrical Coordinates, Their Solutions and Applications.
», Cambridge Philosophical Society Transactions, Vol.14, pp.
250-369(1889).
[36] FOLLANSBEE P., « The Hopkinson Bar. », Metals
Handbook, American Society for Metals, Vol.8, pp. 198-203(1995).
[38] CHENG Z.Q., CRANDALL J.R. and PILKEY W.D., « Wave
Dispersion and Attenuation in Viscoelastic Split Hopkinson Pressure Bar.
», Shock and Vibration, Vol. 5, pp. 307-315(1998).
[39] KOLSKY H., « Stress Waves in Solids. », Dover
Publications, New York (1963).
[40] WANG L., LABIBES K., AZARI Z., and PLUVINAGE G., «
Generalization of Split Hopkinson Bar Technique to use Viscoelastic Bars.
», International Journal of Impact Engineering, Vol.15, pp.
669-686(1994).
[41] TYAS A. and WATSON A, « An Investigation of
Frequency Domain Dispersion Correction of Pressure Bar Signals. »,
International Journal of Impact Engineering, Vol.25, pp. 87-101(2001).
[42] SAWAS O., BRAR N.S., BROCKMAN R.A., « Dynamic
Characterization of Compliant Material Using an All Polymeric Split Hopkinson
Bar. », Experimental Mechanics, Vol. 38, pp. 204-210(1998).
[43] ZHAO H. and GARY G., « A Three Dimensional
Analytical Solution of the Longitudinal Wave Propagation in an Infinite Linear
Viscoelastic Cylindrical Bar-Application to Experimental Techniques. »,
Journal of Mechanics of Physical Solids, Vol.43, pp. 1335- 1348(1995).
[44] ZHAO H., GARY G., « Inverse Methods for the Dynamic
Study of Nonlinear Materials with a Split Hopkinson Bar. », IUTAM
Symposium on Nonlinear Waves in Solids, ASME, pp. 185-189(1995).
[45] SOGABE Y., YOKOYAMA TA., YOKOYAMA TE., NAKANO M. and
KISHIDA K., « Split Hopkinson Bar method for Testing Materials with Low
Characteristic Impedance. », Dynamic Fracture, Failure and Deformation
ASME PVP, Vol.300, pp. 137-143(1995).
[46] BACON C., « An Experimental Method for Considering
Dispersion and Attenuation in a Viscoelastic Hopkinson Bar. »,
Experimental Mechanics, Vol.38, pp. 242-249(1998).
[47] BACON C. and BRUN A., « Methodology for a Hopkinson
Test with a Non-Uniform Viscoelastic Bar. », International Journal of
Impact Engineering, Vol.24, pp. 2 19-230(2000).
[48] LUNDBERG B. and HENCHOZ A., « Analysis of Elastic
Waves from Two Point Strain Measurements. », Experimental Mechanics,
Vol.17, pp. 213-218(1977).
[49] BAZLE A.G., SERGEY L.L and JOHN W.G.J., « Hopkinson
bar experimental technique: A critical review. », Appl Mech Rev, Vol.57,
no 04, pp.223-250(2004).
[50] LARBI G., « Etude, Conception et Réalisation
d'un dispositif pour essais de flexion trois points & à appui
carré par barres d'Hopkinson. », Mémoire d'ingéniorat
en optique et mécanique de précision, I.O.M.P, Sétif,
Algérie (2003).
[51] SAÏD B., «Rupture dynamique du verre sous impacts
et érosion par sablage. » Thèse de doctorat, I.O.M.P,
Sétif, Algérie(2001).
[52] DOMINIQUE F., «Essais mécaniques des
métaux-détermination des lois de comportement. »
Encyclopédie de techniques de l'ingénieur, MB2, M120-7(Mars
2000).
[53] LIFSHITZ J.M. and LEBER H., « Data processing in the
split Hopkinson pressure bar tests. », Int. J. Impact Eng, Vol. 15, no 06,
pp.723-733(1994).
[54] National instruments, « Measurement and automation
07|Catalog. »,
ni.com, Austin, (2007).
[55] KENNETH D.R., SHUN C.C. and JAMES H.R., « Design and
operating characteristics of split Hopkinson pressure bar apparatus »,
AMMRC TR 71-49(1971).
[56] BAILON J.-P. and DORLOT J.-M., « Des matériaux.
» , 3ème éd., Presses internationales de
l'école Polytechnique, Montréal, p.586(2000).
[57] HOWARD A.K., « Tensile Loading », ASM Handbook,
Mechanical Testing and Evaluation, ASM Int, Materials Park OH, Vol. 8,
pp.122-133(2000).
[58] GOËR J.-L. L. and AVRIL J., « Capteurs à
jauges extensométriques », Encyclopédie de techniques de
l'ingénieur, R1 860-8(2001).
[58] FAIVRE A., « Conception et validation d'un nouvel
outil d'analyse de la marche », Thèse de doctorat,
Franche-Comté, pp.87-95(2003).
[59] VISHAY-MICROMESURES, « Comment choisir les accessoires
d'extensométrie par jauges électriques », Catalogue
A-110-1-F, pp.7-8(1998).
[60] KAISER M.A., « Advancements in the Split
Hopkinson Bar Test », Master of Science thesis in mechanical engineering,
Blacksburg, Virginia (1998).
[61] GRAY III G.T., « Classic split-Hopkinson pressure bar
testing », ASM Handbook, Mechanical Testing and Evaluation, ASM Int,
Materials Park OH, Vol.8, pp.462-476(2000).
[62] GORHAM D.A., POPE P.H., and COX O., « Sources of error
in very high strain rate compression tests », Inst. Phys. Conf. Ser. 70,
pp.151-158(1984).
[63] SUBHASH G. and RAVICHANDRAN G., « Split-Hopkinson
pressure bar testing of ceramics », ASM Handbook, Mechanical Testing and
Evaluation, ASM Int, Materials Park OH, Vol.8, pp.488-496(2000).
[64] COUQUE C., ALBERTINI C. and LANKFORD J., « Failure
mechanism in a unidirectional fiber-reinforced thermoplastic composite under
uniaxial, in-plane biaxial and hydrostatically confined compression »,
J.Mater. Sci. Lett. 12, pp.1953-1957(1993).
[65] GRAY III G.T., IDAR D.J., BLUEMENTHAL W.R., CADY C.M.
and PETERSON P.D., « High and low strain-rate compression properties of
several energetic material composites as a function of strain rate and
temperature », 1 1th Detonation Symposium, Snow Mass CO, J Short (ed),
Amperstand Pub. (2000).
[66] FIELD J.E., WALLEY S.M., BOURNE N.K. and HUNTLEY J.M.,
« Review of experimental techniques for high rate deformation studies
», Proc Acoustics and Vibration Asia '98, Singapore, pp.9-38(1998).
[67] GRAY III.G.T., BLUEMENTHAL W.R., TRUJILLO C.P. and
CARPENTER II.R.W., « Influence of temperature and strain rate on the
mechanical behavior of Adiprene L-100 », J. Phys. (France) IV Colloq., C3
(EURODYMAT 97), 7, pp.523-528(1997).
[68] GARY G., KLEPACZKO J.R., and ZHAO H., « Generalization
of split Hopkinson bar technique to use viscoelastic materials », Int. J.
Impact Eng. 16, pp.529-530 (1995).
[69] GARY G., ROTA L. and ZHAO H., « Testing viscous
soft materials at medium and strain rates, Constitutive Relation in
High/Very High Strain Rates », K. Kawata and J. Shioiri (eds),
Springer-Verlag, Tokyo, pp.25-32(1 996).
[70] CHEN W., ZHANG B. and FORRESTAL M.J., « A split
Hopkinson bar technique for low impedance materials », Exp. Mech. 39,
pp.1-5(1999).
[71] ASM Handbook Vol. 8, Mechanical Testing and Evaluation, ASM
Int., Materials Park OH, pp.462-476(2000).
ANNEXE A
SIMULATION DE LA VITESSE D'IMPACT
D'UN
PROJECTILE DANS L'APPAREIL BPHD
A.1 Introduction
Les tests expérimentaux nécessitent des moyens
appropriés et coûteux. La simulation numérique est un outil
très important. Il permet de réduire de façon très
significative les délais et les coûts de la conception. Il s'agit
dans cette étude de modéliser le système propulseur de
l'appareil de compression à barre de pression d'Hopkinson divisée
(BPHD) de LMNM afin de déterminer la vitesse d'impact du projectile par
simulation.
La présente modélisation du système
propulseur découle de l'application de la deuxième loi de la
dynamique de Newton sur un projectile. Deux phases se présentent :
A.2 Au décalage du projectile (Phase
initiale)
En tenant compte de la force de pression, de la force de
frottement statique de coulomb et de la résistance de l'air,
l'équation de mouvement juste au décalage du projectile peut
s'écrire comme suit :
0
X AX 2 + =
B
& & + & + D
1 CX
+
A, B, C et D sont des constantes relatives au système
propulseur.
A.3 Après le décalage du projectile
(Deuxième phase)
Une fois le projectile est mis en mouvement, le frottement
statique s'annule et on aura un frottement cinétique. Ce dernier est
très faible en comparaison avec le frottement statique à point
qu'on peut le négliger. L'équation de mouvement s'écrit
alors :
0
X AX 2 =
& & + & +
B'
A, B' et C' sont des constantes du système propulseur.
La fonction ode 45 prévue par MATLAB utilisant la
méthode de RUNGE-KUTTA 4.5 a été utilisée
pour résoudre le système d'équations. Le tracé de
la vitesse d'impact en fonction de la pression d'alimentation est
représenté ci-dessous.
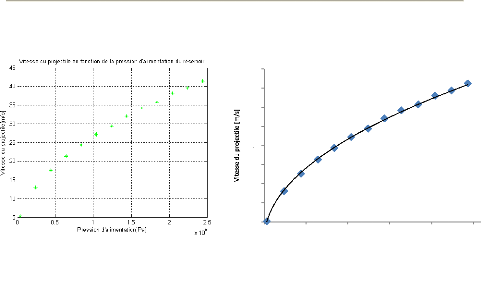
Vitesse du projectile en fonction de la pression d'alimentation
du réservoir
45
40
35
V = 0,103 P0,481
30
25
20
15
10
5
0.0 0.5 1.0 1.5 2.0 2.5
Pression d'alimentation[Pa]
Figure A.1: Vitesse d'impact en fonction de la
pression d'alimentation
D'après la figure A. 1, on constate que la vitesse
d'impact du projectile augmente en fonction de la pression d'alimentation du
réservoir à air comprimé suivant l'expression de puissance
V=0.103P0.481. La fonction de puissance est obtenue par ajout d'une
courbe de tendance au graphique Matlab (courbe à gauche) reconstruit
sous Excel (courbe à droite). Sachant qu'on a pris les valeurs de la
vitesse d'impact à une distance égale à la longueur
d'établissement (Le = 1m).
A.4 Conclusion
Pour la résolution du système d'équations
différentielles, on a établi un code de simulation sous MALAB
utilisant la méthode de Runge-Kutta 4.5. En se référant
à la courbe de la figure A. 1, il est facile à déterminer
la vitesse d'impact du projectile pour une pression donnée du
réservoir à air comprimé.
Il est évident de constater qu'au fur et à mesure
que la pression d'alimentation du réservoir à air comprimé
augmente, la vitesse d'impact du projectile augmente.
A.5 Code source
% Première phase (au moment de décalage du
projectile) %
Function xprime=obuafs(t,x)
global A G K P0 tsk S Vi Pal
% Données du Système propulseur
Mu=0.4;
Pi=3.14;
Lproj=0.1; % Longueur de projectile est 100 mm
Dproj=0.02;
Vproj= Lproj *(Pi*Dproj^2)/4;
Ro=2700; Densité de l'aluminium (Matériau du
projectile)
m=Ro*Vproj;
P=m*9.81;
S=3 14e-006; A= - S/m;
Vd=0.1 141578; %Volume du Reservoir à air comprimé
avec l'entrée de l'électrovanne Vi=0. 1148778; %Volume juste
avant le démarrage du projectile
P0=(Vd*Pal)/Vi;
Z= - (P0*A);
%Mu : Coefficient de frottement projectile-tube
%P,m: Respectivement poids[N] et masse du projectile [Kg]
%P0,Vi et X0: Respectivement; pression initiale [Pa], Volume
initial [m^3] et origine des x %[m]
G=Mu*P*Pi/(2*m); K=S/Vi; F=S*K/m;
% L'équation différentielle qui régit le
Système propulseur au moment de décalage du %..projectile est: X'
'+(Z/(1+KX)+(A*X'^2)-G=0
% xprime: Fichier dans lequel on décrit le Système
différentiel
xprime=[x(2);Z/(1+K. *x(1 ))+A. * (x(2).^2)-G];
% Deuxième phase (Après le décalage du
projectile) %
function xprime=projsfs(T,X) global A G K P0 tsk S Vi X0
B=Vi+S*X0; PX0=P0/(1 +K*X0); Y=-(PX0*A);
% L'équation différentielle qui régit le
Système propulseur après le
% Décalage du projectile est: X"+ (Y/ (1+BX) +
(A*X'^2)=0
% xprime : Fichier dans lequel est décrit le
Système différentiel
xprime=[X(2);Y/(1 +B . *(X(1 )-X0))+A. * (X(2).^2)]; % Programme
principale %
clear all % Effacement des variables de l'espace de travail
global t0 tsk tf X0 V0 Pal
%Conditions aux limites du système différentiel
t0=0; tsk=0.003; tf=0.6;
% Pal=0.0 1 e+005 :0.02e+005 :0.3e+005 Simulation originale
for Pal=0.2e+005 :0.2e+005:25e+005,
%ode45 : Fonction prévue par MATLAB utilise la
méthode de RUNGE-KUTTA 4.5 [t,x]=ode45('obuafs', [t0,tsk], [0 ;0]);
%Conditions initiales de la deuxième phase (Après
le décalage)
X0=x(end,1) ; V0=x(end,2); [T,X]=ode45('projsfs', [tsk:0.00 1
:tf], [X0 ;V0]);
i= 1;
while X(i,1)<1,
i=i+ 1;
end
plot(Pal,X(i,2),'G*'),hold on end
xlabel('Pression d"alimentation[Pa]'),ylabel('Vitesse du
projectile[m/s]'),grid
title('Vitesse du projectile en fonction de la pression
d"alimentation du réservoir')
ANNEXE B
DESSINS DE DEFINITION DE LA BARRE DE
PRESSION
D'HOPKINSON DIVISEE(BPHD) DE LMNM
Cette annexe regroupe les dessins de définition des
éléments réalisés du prototype de la barre de
pression d'Hopkinson divisée (BPHD) de LMNM. On a conçu ces
dessins avec SolidWorks2007SP2.2.
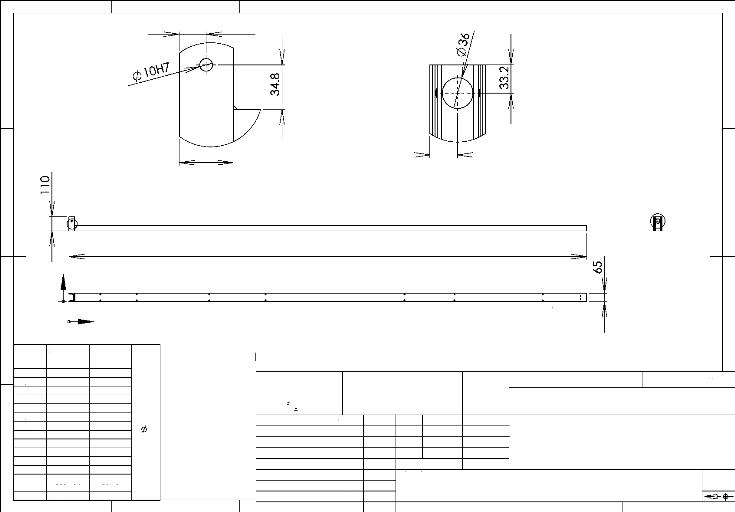
1
2
3
4
5
6
20.9
A
A
42
32.5
B
A
DÉTAIL A
ECHELLE 1 : 2
DÉTAIL B
ECHELLE 1 : 3
B
B
4042
Y
A2
A4
A6
A8
A10 A12 A14
A16
0
A1
A3
A5
A7
A9
A11
A13
A15
C
0
X
C
REPERE
A1
POSITION X POSITION Y
245
9
TAILLE
Les deux profiles sont asseblés par cordon de soudure
convexe de rayon 3mm
A2
A3
A4
A5
1095
245
529
529
56
56
9
9
SAUF INDICATION :
LES DIMENSIONS SONT EN mm RUGOSITE TOTALE : TOLERANCES :
LINÉAIRE : 0.1
FINITION:
Teinté vert
ÉBAVURER ET CASSER LES ARÊTS VIFS
NE PAS CHANGER L'ECHELLE DU DESSIN
Université de M'sila-Département de GM
REVISION 03
A6
1095
56
ANGULAIRE :
0.5°
D
A1 0
A11
A7
A8
A9
2620
2620
3010
1535
1535
56
56
9
9
9
6
DESSINE
APPV'D
CHK'D
Gueraiche Larbi
NOM
SIGNATURE
30/05/2007
DATE
TITRE:
Support de BPHD
A12
3010
56
MFG
A1 3
A14
A15
3995.06
3700
3700
20.50
56
9
Q.A
MATERIAU:
Acier non allié
DWG NO.
01
A4
A16
3995.06
44.50
1
2
POIDS:
Echelle:1 :50
PLANCHE 1 DE 1
|
A
B
C
|
|
|
|
|
|
|
|
|
|
A
|
|
|
|
|
D
E
F
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
COUPE A-A
A
|
|
|
SAUF INDICATION :
LES DIMENSIONS SONT EN mm RUGOSITE TOTALE :
TOLERANCES :
LINÉAIRE : 0.1
ANGULAIRE : 0.5°
|
FINITION:
Non
|
ÉBAVURER ET CASSER LES ARÊTS VIFS
|
NE PAS CHANGER L'ECHELLE DU DESSIN
|
REVISION 02
|
|
Université de M'sila-Département de GM
|
|
NOM
|
SIGNATURE
|
DATE
|
|
|
|
TITRE:
Flexible_Axe
|
|
DESSINE
|
LARBI GUERAICHE
|
|
11/09/2007
|
|
|
|
|
CHK'D
|
|
|
|
|
|
|
|
APPV'D
|
|
|
|
|
|
|
|
MFG
|
|
|
|
|
|
|
Q.A
|
|
|
|
MATERIAU:
Caoutchouc
|
DWG NO.
08
|
A4
|
|
|
|
|
|
|
|
|
|
|
|
|
|
POIDS:
|
Echelle:2:1
|
PLANCHE 1 DE 1
|
|
A
B
C
|
A
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6
|
|
|
|
34
|
|
|
|
A
|
|
|
|
|
COUPE A-A
5.5
|
|
D
E
F
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
36
|
|
|
|
58
|
|
|
SAUF INDICATION :
LES DIMENSIONS SONT EN mm RUGOSITE TOTALE :
TOLERANCES :
LINÉAIRE : 0.1
ANGULAIRE : 0.5°
|
FINITION:
Teinté vert
|
ÉBAVURER ET CASSER LES ARÊTS VIFS
|
NE PAS CHANGER L'ECHELLE DU DESSIN
|
REVISION 03
|
|
Université de M'sila-Département de GM
|
|
NOM
|
SIGNATURE
|
DATE
|
|
|
|
TITRE:
Support du vérin
|
|
DESSINE
|
LARBI GUERAICHE
|
|
11/09/2007
|
|
|
|
|
CHK'D
|
|
|
|
|
|
|
|
APPV'D
|
|
|
|
|
|
|
|
MFG
|
|
|
|
|
|
|
Q.A
|
|
|
|
MATERIAU:
Acier allié
|
DWG NO.
12
|
A4
|
|
|
|
|
|
|
|
|
|
|
|
|
POIDS:
|
Echelle:1:1
|
PLANCHE 1 DE 1
|
|
A
B
C
|
36
|
|
|
B
|
|
|
|
|
|
|
|
|
|
|
|
A
|
|
|
|
A
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B
|
28
|
6
17
|
|
|
|
COUPE B-B
|
|
D
E
F
|
|
|
|
1 x45°
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
29
|
|
COUPE A-A
|
|
SAUF INDICATION :
LES DIMENSIONS SONT EN mm RUGOSITE TOTALE :
TOLERANCES :
LINÉAIRE : 0.1
ANGULAIRE : 0.5°
|
FINITION:
Teinté vert
|
ÉBAVURER ET CASSER LES ARÊTS VIFS
|
NE PAS CHANGER L'ECHELLE DU DESSIN
|
REVISION 03
|
|
Université de M'sila-Département de GM
|
|
NOM
|
SIGNATURE
|
DATE
|
|
|
|
TITRE:
Support de la douille
|
|
DESSINE
|
LARBI GUERAICHE
|
|
11/09/2007
|
|
|
|
|
CHK'D
|
|
|
|
|
|
|
|
APPV'D
|
|
|
|
|
|
|
|
MFG
|
|
|
|
|
|
|
Q.A
|
|
|
|
MATERIAU:
Acier non allié
|
DWG NO.
16
|
A4
|
|
|
|
|
|
|
|
|
|
|
|
|
POIDS:
|
Echelle:1:1
|
PLANCHE 1 DE 1
|
|
A
B
C
|
|
|
|
|
|
|
|
|
|
|
0.05
|
|
|
|
|
|
|
|
|
D
E
F
|
|
|
|
|
|
20g5
|
|
|
SAUF INDICATION :
LES DIMENSIONS SONT EN mm RUGOSITE TOTALE :
TOLERANCES :
LINÉAIRE : 0.1
ANGULAIRE : 0.5°
|
FINITION:
Non
|
ÉBAVURER ET CASSER LES ARÊTS VIFS
|
NE PAS CHANGER L'ECHELLE DU DESSIN
|
REVISION 01
|
|
Université de M'sila-Département de GM
|
|
NOM
|
SIGNATURE
|
DATE
|
|
|
|
TITRE:
Barre de sortie
|
|
DRAWN
|
GUERAICHE LARBI
|
|
18/12/2007
|
|
|
|
|
CHK'D
|
|
|
|
|
|
|
|
APPV'D
|
|
|
|
|
|
|
|
MFG
|
|
|
|
|
|
|
Q.A
|
|
|
|
MATERIAU:
Alliage 1060
|
DWG NO.
19
|
A4
|
|
|
|
|
|
|
|
|
|
|
|
|
POIDS:
|
ECHELLE:1:10
|
PLANCHE 1 DE 1
|
|
A
B
C
|
|
|
|
|
|
|
|
|
|
|
0.05
|
|
|
|
|
D
E
F
|
|
|
|
20g5
|
|
|
|
SAUF INDICATION :
LES DIMENSIONS SONT EN mm RUGOSITE TOTALE :
TOLERANCES :
LINÉAIRE : 0.1
ANGULAIRE : 0.5°
|
FINITION:
Non
|
ÉBAVURER ET CASSER LES ARÊTS VIFS
|
NE PAS CHANGER L'ECHELLE DU DESSIN
|
REVISION 03
|
|
Université de M'sila-Département de GM
|
|
NOM
|
SIGNATURE
|
DATE
|
|
|
|
TITRE:
Barre d'entrée
|
|
DESSINE
|
GUERAICHE LARBI
|
|
12/1 1/2007
|
|
|
|
|
CHK'D
|
|
|
|
|
|
|
|
APPV'D
|
|
|
|
|
|
|
|
MFG
|
|
|
|
|
|
|
Q.A
|
|
|
|
MATERIAU:
ALLIAGE 1060
|
DWG NO.
20
|
A4
|
|
|
|
|
|
|
|
|
|
|
|
|
POIDS
|
ECHELLE:1:20
|
PLANCHE 1 DE 1
|
|
A
B
C
D
E
F
|
2.7
|
A
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B
|
|
B
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6
|
|
|
|
COUPE A-A
22H
|
|
|
A
|
|
6
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
36
|
|
|
|
58
|
|
COUPE B-B
|
|
SAUF INDICATION :
LES DIMENSIONS SONT EN mm RUGOSITE TOTALE :
TOLERANCES :
LINÉAIRE : 0.1
ANGULAIRE : 0.5°
|
FINITION:
Teinté vert
|
ÉBAVURER ET CASSER LES ARÊTS VIFS
|
NE PAS CHANGER L'ECHELLE DU DESSIN
|
REVISION 03
|
|
Université de M'sila-Département de GM
|
|
NOM
|
SIGNATURE
|
DATE
|
|
|
|
TITRE:
Support d'extrémité
|
|
DESSINE
|
LARBI GUERAICHE
|
|
11/09/2007
|
|
|
|
|
CHK'D
|
|
|
|
|
|
|
|
APPV'D
|
|
|
|
|
|
|
|
MFG
|
|
|
|
|
|
|
Q.A
|
|
|
|
MATERIAU:
Acier non allié
|
DWG NO.
21
|
A4
|
|
|
|
|
|
|
|
|
|
|
|
|
POIDS:
|
Echelle:1:1
|
PLANCHE 1 DE 1
|
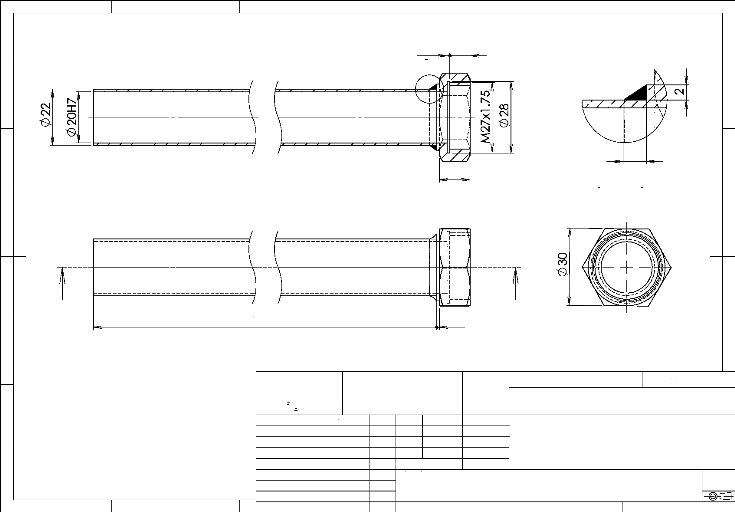
5
4
3
2
6
1
1.1 7.9
A
A
C
3
COUPE A-A ECHELLE 1 : 1
12
DÉTAIL C
ECHELLE 3 : 1
B
B
A
A
1000
C
C
1
SAUF INDICATION :
LES DIMENSIONS SONT EN mm RUGOSITE TOTALE : TOLERANCES :
LINÉAIRE : 0.1
FINITION:
NE PAS CHANGER L'ECHELLE DU DESSIN
03
REVISION
Non
ÉBAVURER ET CASSER LES ARÊTS VIfS
Université de M'sila-Département de GM
ANGULAIRE :
0.5°
NOM
DATE
SIGNATURE
TITRE:
DESSINE
REVISION
11/1 1/2007
Larbi Gueraiche
CHK'D
Tube du Propulseur
D
APPV'D
MFG
Q.A
DWG NO.
MATERIAU:
Cuivre
A4
22
1
2
POIDS:
PLANCHE 1 DE 1
Echelle:1:10
|
A
B
C
|
12
|
|
|
8
|
6
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A
|
|
|
|
|
|
|
|
A
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
36
|
14
|
|
|
|
21
|
|
6
|
|
|
1
|
|
|
|
|
2
|
|
|
|
|
|
|
D
E
F
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B
|
|
|
|
|
|
|
|
|
|
|
5
|
|
DÉTAIL B COUPE A-A
ECHELLE 2 : 1
|
|
|
SAUF INDICATION :
LES DIMENSIONS SONT EN mm RUGOSITE TOTALE :
TOLERANCES :
LINÉAIRE : 0.1
ANGULAIRE : 0.5°
|
FINITION:
Non
|
ÉBAVURER ET CASSER LES ARÊTS VIFS
|
NE PAS CHANGER L'ECHELLE DU DESSIN
|
REVISION 02
|
|
Université de M'sila-Département de GM
|
|
NOM
|
SIGNATURE
|
DATE
|
|
|
|
TITRE:
Reducteur
|
|
DESSINE
|
LARBI GUERAICHE
|
|
11/09/2007
|
|
|
|
|
CHK'D
|
|
|
|
|
|
|
|
APPV'D
|
|
|
|
|
|
|
|
MFG
|
|
|
|
|
|
|
Q.A
|
|
|
|
MATERIAU:
Laiton
|
DWG NO.
25
|
A4
|
|
|
|
|
|
|
|
|
|
|
|
|
|
POIDS:
|
Echelle:1:1
|
PLANCHE 1 DE 1
|
|
A
B
C
|
48
|
A
|
|
D
E
F
|
|
|
|
|
|
|
|
|
|
COUPE A-A
|
|
|
A
|
|
|
SAUF INDICATION :
LES DIMENSIONS SONT EN mm RUGOSITE TOTALE :
TOLERANCES :
LINÉAIRE : 0.1
ANGULAIRE : 0.5°
|
FINITION:
Non
|
ÉBAVURER ET CASSER LES ARÊTS VIFS
|
NE PAS CHANGER L'ECHELLE DU DESSIN
|
REVISION 02
|
|
Université de M'sila-Département de GM
|
|
NOM
|
SIGNATURE
|
DATE
|
|
|
|
TITRE:
Flexible
|
|
DESSINE
|
Gueraiche Larbi
|
12/11/2007
|
|
|
|
|
|
CHK'D
|
|
|
|
|
|
|
|
APPV'D
|
|
|
|
|
|
|
|
MFG
|
|
|
|
|
|
|
Q.A
|
|
|
|
MATERIAU:
Caoutchouc
|
DWG NO. 26
|
A4
|
|
|
|
|
|
|
|
|
|
|
|
|
POIDS:
|
SCALE:1:1
|
PLANCHE 1 DE 1
|
|
A
B
C
|
|
|
|
|
|
|
|
|
|
|
0.05
|
|
|
|
20g5
|
|
D
E
F
|
|
|
|
|
SAUF INDICATION :
LES DIMENSIONS SONT EN mm RUGOSITE TOTALE :
TOLERANCES :
LINÉAIRE : 0.1
ANGULAIRE : 0.5°
|
FINITION:
Non
|
ÉBAVURER ET CASSER LES ARÊTS VIFS
|
NE PAS CHANGER L'ECHELLE DU DESSIN
|
REVISION 02
|
|
Université de M'sila-Département de GM
|
|
NOM
|
SIGNATURE
|
DATE
|
|
|
|
TITRE:
Projectile
|
|
DESSINE
|
GUERAICHE LARBI
|
|
13/1 1/2007
|
|
|
|
|
CHK'D
|
|
|
|
|
|
|
|
APPV'D
|
|
|
|
|
|
|
|
MFG
|
|
|
|
|
|
|
Q.A
|
|
|
|
MATERIAU:
Alliage 1060
|
DWG NO.
38
|
A4
|
|
|
|
|
|
|
|
|
|
|
|
|
POIDES:
|
ECHELLE:1:2
|
PLANCHE 1 DE 1
|
|
|
|
|
|
|
|
|
: ????
|
|
ÏæÒã
ÒÇåÌáÇ
|
. ?????Ç
|
äæÓäíßÈæ?
|
????Ç ÈíÖÞ
ìãÓãáÇ
ÒÇåÌáÇ
|
?????
|
æ ãíãÕÊÈ
ÇäãÞ
ÚæÖæãáÇ ÇÐå
|
??
|
|
|
??? ßÑÊÔãáÇ
|
???Ç ÏäÚ
|
????? ????
|
ÁÒÌ .
ÏÑÇæáÇ
ÈíÖÞáÇ
ÒÇÊÌÊ íÊáÇ
|
?????Ç
|
ÊÇÌæãáÇ
ÊÇÑÇÔÅ
|
ØÇÞÊáÇÈ
ÍãÓÊ
|
ÏÏãÊ
|
ÊÇÓÌãÈ
|
|
áÇÌã
ÛæáÈá
|
???????
|
??? ÉäÑãáÇ
|
ÊÇÌæãáÇ É
ÚÓ ÚÖ ÈÈÓÈ .
ÑÏÇÕáÇ
|
???? áÇ ìáÅ
ÑÈÚ í
|
?????Çæ
ÉäíÚáÇæ
ÑíÎ?Ç ÇÐå
|
|
?????æ ãÓÇÑáÇ
ìáÚ ÊÇÑÇÔ?Ç
ÉÙÍ?ã äã
äßãÊáÇ ÏÚÈ . " PM3 365
" ãÏÎÊÓãáÇ
íØÈåãá Ç
ÒÇÒÊå?Ç
ãÓÇÑá
íÂÑÍáÇ
ÈæÇÌÊáÇ
.ÉÑã 1000 ìáÅ
áÕí íÐáÇ
íáÇÚáÇ
ÏæÏÑãáÇ ÊÇÐ "
PCL-8 18HG " ???? áÇ
ÉÞÇØÈÈ
ÑíÎ?Ç ÇÐå
áÏÈÊÓä
ÇåÊÚÓ
|
|
?????
ãÇÏÎÊÓÇÈ
|
??Ðæ
|
ÈæÓÇÍáÇ
|
???ÇæÈ
ãßÍÊáÇ
|
????
|
?? ??? ??ÇÏÊÈ?Ç
ÚÖæáÇ ìáÅ
ÉíÐÞá Ç
ÉÏÇÚÅæ Þ?ØÅ
|
|
|
|
|
|
|
. " PCB 123 " È
ÇåÇäããÕ
áÍÞãáÇ
áíÏÈÊ ÏÈãÈ
áãÚÊ
|
???æÑÊßáÇ
|
|
ÉÏÑÇæáÇ
ÉÌæãáÇ
|
????
|
????????Ç
|
ÊÇäÇíÈáÇ
ÉÆíÈ í
|
????
|
?????? áíÏÚÊÈ
ÇäãÞ
ãÏÎÊÓãáÇ
ìáÚ ÑËÂ
ÉãåãáÇ
áíåÓÊá
|
|
|
|
. ??????Çæ
|
ÑÇÔÊä?Ç
|
?????
|
ÇÐÂæ É ÓßÚ
äãáÇ ÉÌæãáÇ
äÚ
|
|
|
|
|
|
: ???????
ÊÇãáÂ
|
|
.
ÊÇíØÚãáÇ
áÇÎÏÅ
ÈæÓÇÍáÇ
ÞíÑØ äÚ
|
?????Ç ííÑæ
|
????? ÑÇÔÊä?Ç
ÉÞ?Ú
|
ÉäÑãáÇ
|
ÊÇÌæãáÇ
|
??? äæÓäíßÈæ
äÇÈÖÞ
|
Résumé:
Dans ce sujet, on a conçu et réalisé un
dispositif à barre de pression d'Hopkinson divisée (BPHD). Le
dispositif est instrumenté par des jauges extensométriques en un
quart en pont. Les signaux des jauges sont d'abord amplifiés à
l'aide d'un circuit à base de LM837 pour atteindre la gamme dynamique de
l'oscilloscope. Ils peuvent être mémorisés à l'aide
de l'oscilloscope PM3365. Une fois que l'ordre de grandeur des signaux est
déterminé, on le remplace par une carte d'interface PCL-818HG
à gain élevé allant jusqu'à 1000 fois.
Le lancement et la remise en position initiale du projectile sont
assurés par PC à l'aide d'une interface qu'on a
élaboré sous PCB 123 sur la base de la commutation d'un
transistor.
Un programme VC++6.0 modifié permet la séparation
des ondes incidente et réfléchie ainsi que la correction de la
dispersion et de l'atténuation.
Mots clés :
Barres d'Hopkinson, Equation de Pochhammer-Chree,
Séparation des ondes, Relation de dispersion, Atténuation,
Transformée de Fourier, Pilotage par PC, Acquisition des données
et PP-Alfa.
Abstract:
In this subject, we have designed and carried out a split
Hopkinson pressure bar (SHPB). The device is instrumented by gauges .The
signals of the gauges are initially amplified before being recorded by the
PM3365 scope. Then, we have used the PCL-818HG board of high gain going up to
1000 times.
The launching and the handing-over in initial position of the
striker are ensured by PC using an interface that we have worked out under PCB
123 on the basis of commutation of a transistor.
A modified program VC++6.0 allows the separation of the incident
and reflected waves as well as the correction of dispersion and attenuation.
Key words:
Hopkinson Bars, Pochhammer-Chree equation, Separation
of waves, Relation of dispersion, Attenuation, Fourier transform, Command by
PC, Data acquisition and PPEsparto
| 

