|
Estimation
Modélisation 3D
Données récoltées
Coupe horizontale
Corrélation
Variogramme

|
Université de Bretagne Sud
Institut Universitaire Professionnalisé Informatique et
Statistique
Rue Yves Mainguy
56000 Vannes
|
Rapport de stage
« Méthodes géostatistique
pour
l'interpolation et la modélisation en
2D/3D
des données spatiales. »
Par Wilfried DESPAGNE
Master 2 /
2005-2006
Date de soutenance : Juin 2006
Remerciements
C'est un plaisir pour moi de remercier l'ensemble des
chercheurs du groupe LEMEL et plus particulièrement Evelyne GOUBERT,
David MENIER et Valérie MONBET. Ces derniers m'ont accordé
beaucoup de leur temps, m'ont fait bénéficier de leur savoir et
de leur expérience tout au long de ce travail. Ils ont été
d'une aide précieuse pour comprendre la problématique, la cerner
et y répondre.
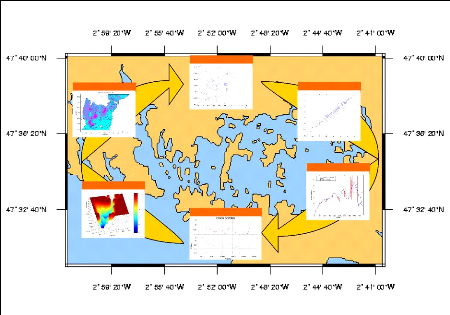
Résumé
Les travaux de recherche présentés dans ce
rapport ont été effectués au sein du laboratoire LEMEL
(Laboratoire d'Etude et Modélisation des Environnements Littoraux). Il
parcourt différentes techniques d'interpolations spatiales. A partir
d'un échantillon de données sédimentologiques,
géophysiques, et bathymétriques, il s'agit de réaliser des
cartes 2D/3D indiquant la profondeur au toit du socle rocheux à l'est de
l'île aux Moines dans le Golfe du Morbihan. Les méthodes
d'interpolations sont également utilisées pour localiser des
zones à forte présence en crépidules au nord ouest de
l'île de Bailleron. Ces deux applications concrètes permettent
d'opposer les méthodes déterministes aux méthodes
géostatistiques. Les fondements mathématiques des techniques
d'interpolations spatiales sont analysés. Des préconisations
générales sont données, sur l'usage des modèles
d'interpolation pour la cartographie.
Mots-clés : coordonnées géographiques,
interpolation, extrapolation, lissage, estimation, sectorisation, variable
régionalisé, géostatistique, variogramme, krigeage,
validation croisée, toit de substratum.
Summary
The research tasks presented in this memory were carried out
within laboratory LEMEL (Laboratory for Study and Modelling of the Littoral
Environments). It goes through various techniques of spatial interpolations.
From a sample of `sedimentologics', geophysics, and bathymetric data, it
involves of realizing 2D / 3D maps modelling the depth to the roof of the rocky
in the Morbihan's bay. The methods of interpolations are also used to localize
zones with strong presence of `crépidules' in the western North of
Bailleron's island. These two concrete applications will oppose the determinist
methods against the géostatistics methods. The mathematical bases as
well as their demonstrations are examined. General recommendations are giving,
on the usage of the models of interpolation for the mapping.
Keywords: geographic coordinated, interpolation, extrapolation,
smoothing, estimation, division into sectors, regionalized variable,
geostatistic, variogram, model fitting, kriging, model validation, roof of
substratum.
REMERCIEMENTS 2
RÉSUMÉ 3
INTRODUCTION : PRÉSENTATION DE L'ÉTUDE 6
CHAPITRE I : DIFFÉRENTS OUTILS DE CARTOGRAPHIE
8
1/ INTERPOLATION SPATIALE 8
1.1/ Forme générale de l'interpolation
linéaire 8
1.1.1/ Méthodes d'interpolation par partitionnement de
l'espace 8
1.1.1.1/ Polygones de Thiessen 8
1.1.1.2/ Triangulation 9
1.1.2 / Méthodes d'interpolation barycentriques 11
1.1.2.1/ Plus proches voisins 11
1.1.2.2/ Méthode de l'inverse des distances 11
1.1.3/ Résumé 12
1.2/ Modèles d'estimation géostatistique 12
CHAPITRE II : MÉTHODES DE LA
GÉOSTATISTIQUE LINÉAIRE 14
1/ NOTATIONS ET DÉFINITIONS 14
1.1/ Notion de variable régionalisée et
notion de champ 14
1.2/ Notations 14
2/ HYPOTHÈSES DE BASE 15
3/ VARIOGRAMME 17
3.1/ Variogramme théorique et variogramme
expérimental 17
3.2/ Propriétés du variogramme 18
3.3/ Modélisation du variogramme 19
3.4/ Isotropie et anisotropie 20
3.5/ Cas multivarié : calcul des variogrammes
croisés 20
4/ KRIGEAGE 21
4.1/ Hypothèses et contraintes 21
4.2/ Estimateur de krigeage 23
4.3/ Cas multivariable : Cokrigeage 23
4.4/ Conclusion 24
CHAPITRE III : RECUEIL ET ANALYSE PRÉALABLE DE
L'INFORMATION 25
1/ LOCALISATION DE LA ZONE D'ÉTUDE 25
2/ SOURCE DES DONNÉES 25
2.1/ Informations provenant des campagnes sismiques
26
2.1.1/ Recueil des données sismiques 26
2.1.2/ Plan d'échantillonnage 27
2.2/ Bathymétrie : Information auxiliaire 28
3/ ETUDE EXPLORATOIRE DE L'ÉCHANTILLON DE LA VARIABLE
D'INTÉRÊT 29
3.1/ Histogrammes et statistiques descriptives
29
3.2/ Comportements directionnels : Etude de
stationnarité 30
3.3/ Nuage de corrélation différée ou
« h-scatter plots » 31
3.4/ Description bivariée 32
4/ TRANSFORMATION DES COORDONNÉES 33
5/ CONCLUSION 34
CHAPITRE IV : ANALYSE VARIOGRAPHIQUE
35
1/ VARIOGRAMMES EXPÉRIMENTAUX 35
1.1/ Variogramme omnidirectionnel 35
1.2/ Variogrammes directionnels 36
1.3/ Anisotropie 37
1.4/ Comportement à l'origine du variogramme
39
1.5/ Variogrammes croisés 39
2/ AJUSTEMENT À UN MODÈLE 40
2.1/ Cas monovariable 40
2.2/ Validation croisée 42
3/ CONCLUSION 44
CHAPITRE V : ESTIMATION PAR KRIGEAGE 45
1/ CHOIX DE LA GRILLE ET DU VOISINAGE DE KRIGEAGE 45
2/ RÉSULTATS OBTENUS PAR KRIGEAGE ORDINAIRE 45
3/ RÉSULTATS OBTENUS PAR COKRIGEAGE ORDINAIRE 46
3.1/ Ajustement du variogramme croisé
47
3.2/ Validation Croisée 47
3.3/ Résultat du cokrigeage 49
4/ COMPARAISON GRAPHIQUE AVEC D'AUTRES MÉTHODES
D'INTERPOLATION 51
1/ EPAISSEUR DE SÉDIMENT 52
2/ COURANTS MARINS 52
CHAPITRE VII : LOCALISATION DES COLONIES DE
CRÉPIDULES 54
1/ PROBLÉMATIQUE 54
2/ ZONE D'ÉTUDE 54
3/ STATISTIQUES SPATIALES DESCRIPTIVES 55
3.1 Position et dispersion 55
3.2 Sectorisation 56
3.3 Méthode des quadrats 56
3.4 Analyse spatiale exploratoire basée sur les
distances 58
3.4.1 Méthode du voisin le plus proche 58
3.4.2 Fonction de Ripley modifiée (L de Besag)
59
3.5 Conclusion de l'analyse spatiale descriptive 61
4 / MÉTHODE D'INTERPOLATION PAR PARTITIONNEMENT DE
L'ESPACE 61
4.1 Polygones de Thiessen 61
4.2 Interpolation par la méthode des plus proches
voisins 61
5.3 Interpolation suivant le nombre d'individus
comptés 62
5.4 Conclusion 65
BIBLIOGRAPHIE 67
Introduction : présentation de l'étude
Les travaux de recherche présentés dans ce
mémoire ont été effectués au sein du laboratoire
LEMEL (Laboratoire d'Etude et Modélisation des Environnements
Littoraux). Il est rattaché à la « Faculté de Science
et Science de l'Ingénieur » de l'Université de Bretagne Sud.
C'est un groupe pluridisciplinaire (géologues, biologistes,
mathématiciens, statisticiens...) qui s'attache à
modéliser les écosystèmes à l'interface terre/mer.
Il passe pour cela par l'intermédiaire de SIG (Système
d'Information Géographique) afin d'acquérir, de consulter et de
gérer l'information géographique.
Ce mémoire de stage présente
l'élaboration d'une carte de la profondeur au toit du socle rocheux
à l'ouest de l'île aux Moines et une carte localisant les
crépidules au nord ouest de l'île de Bailleron (golfe du
Morbihan). Une image 3D au du toit du substratum fournit un outil pour
comprendre comment se répartissent les corps sédimentaires dans
l'espace. Localiser les zones à présence de crédidules
permet de lutter contre cet envahisseur. La connaissance, des profondeurs au
toit du substratum* ou la quantité de
crépidules**, en tout point d'une zone, nécessite :
- d'une part, de nombreuses données de mesure
géophysiques, bathymétriques
et sédimentologique que l'on rapporte à des
coordonnées géographiques précises (latitude /
longitude)
- d'autre part, un outil d'interpolation permettant de calculer,
à partir des
données de mesure, les profondeurs en tout point de la
zone : il s'agit alors d'une estimation mathématique de cette
profondeur.
Il existe de nombreuses techniques d'interpolation
définies comme :
- des méthodes d'interpolation déterministes
- des approches statistiques ou géostatistiques
(stochastique)
Elles ont toutes leurs avantages et inconvénients. Mais
dans tous les cas, le principe reste le même : une valeur est
estimée pour des sites non échantillonnés, sur la base
d'observations existantes.
Le premier chapitre du rapport recense différentes
approches déterministes pour interpoler un ensemble de données.
Une description très générale en est fournit.
Le deuxième chapitre, propose une analyse des
techniques géostatistiques et des conditions de leur mise en oeuvre. Les
fondements mathématiques ainsi que leurs démonstrations sont
examinées. Le krigeage et l'analyse variographique, une étape
préalable du krigeage, sont analysés et commentés. Elles
s'appuient sur une synthèse bibliographique.
Les chapitres III à VI présentent une
application des méthodes géostatistiques pour aboutir un
modèle numérique de terrain au toit du substratum. Ils
fournissent également des conseils sur la nature de l'information qu'il
est nécessaire de recueillir pour utiliser efficacement ces
méthodes. Ils préconisent une démarche à suivre
pour interpréter les résultats. Ils mettent en évidence
les avantages et les limites des méthodes géostatistiques.
Le dernier chapitre dévoilera une application des
méthodes d'analyse spatiale concernant
uniquement la position
géographique des objets, et des méthodes non stochastiques
présentées
* Substratum : base (souvent un socle rocheux ou cristallin) sur
laquelle repose les sédiments. ** Crépidule : mollusque
gastéropode
en première partie. Elles ont pour objectif d'identifier
des zones géographiques occupées par les crépidules.
Chapitre I : Différents outils de cartographie
1/ Interpolation spatiale
L'interpolation spatiale est une procédure qui consiste
à estimer la valeur d'un attribut pour des sites non
échantillonnés. Dans le contexte de ce stage, nous utilisons
l'interpolation spatiale pour mettre en oeuvre des algorithmes
mathématiques ou probabilistes afin d'estimer la profondeur de la roche
entre les points d'échantillonnages.
Il existe de nombreuses méthodes d'interpolation parmi
lesquels il faut faire un choix. Nous distinguerons deux familles :
- les méthodes d'interpolation classiques basées
sur des algorithmes purement déterministes.
- Les méthodes d'estimation géostatistiques qui
s'appuient sur une modélisation probabiliste du phénomène
étudié.
Les méthodes s'appliquent à des variables
régionalisées, c'est-à-dire des fonctions
numériques qui prennent leurs valeurs dans des régions
délimitées de l'espace appelées champ. Dans notre cas, la
variable régionalisée est la profondeur au toit du substratum. Le
champ est la zone d'étude décrite dans le chapitre III.
1.1/ Forme générale de l'interpolation
linéaire
Pour estimer la valeur ponctuelle en un site, nous utilisons
des combinaisons linéaires pondérées. La distance entre
les lieux d'observations a une influence sur ce que l'on observe. Autrement
dit, les valeurs dans deux localités voisines sont souvent plus
semblables que dans deux localités éloignées. Les poids
doivent donc tenir compte non seulement de la disposition des observations les
unes par rapport aux autres, mais aussi de la distance entre le site à
estimer et les sites observés.
1.1.1/ Méthodes d'interpolation par
partitionnement de l'espace 1.1.1.1/ Polygones de Thiessen
La méthode consiste à partitionner l'espace
géographique en polygones, puis à attribuer une valeur à
chacun des polygones. Elle permet de déterminer un zonage où la
valeur de la variable à prédire est à priori la même
que celle du site d'observation*.
Supposons que l'on désire estimer la valeur en un point
S0 du champ (cf. figure 1.1). Ce point appartient
nécessairement à l'un des polygones d'influence des sites
d'observations.
Un polygone d'influence pour l'observation C s'obtient en
traçant les médiatrices des segments joignant C aux sites
voisins.
* site d'observation : donnée source connue et
localisée
On attribue à S0 et à tout point
appartenant au même polygone, la valeur du site ayant ce polygone
d'influence. Sur la figure 1.1, la valeur estimée au point
S0 sera identique à celle du site C.


Médiatrice
Angle droit

C
S0
A
B
Figure 1.1
La méthode de Thiessen peut s'améliorer tout en
gardant le même principe. L'idée de Sibson est de construire un
polygone de Thiessen autour du site à estimer. Dans un deuxième
temps calculer les surfaces d'intersection (P(S0,i)) entre le polygone
précèdent et ceux des sites voisins. Enfin, Sibson propose une
estimation de S0 à l'aide d'une combinaison linéaire des
valeurs des sites voisins (Z(S0)) pondéré par les
surfaces P(S0,i).
Notons, n : nombre d'observation
P(S0) : surface du polygone de Thiessen en
S0
P(S0,i) : surface de l'intersection du polygone de
l'observation i et celle de S0
Alors,
|
à
S 0
Z ( )
|
n
?=
i
|
1
|
P S i
( , )
0 Z P ()
S 0
|
()
S 0
|
La méthode de Sibson a les propriétés
suivantes : - l'estimation en S0 est unique
à
- l'estimation est exacte : ? i = 1 ... n Z(
S i ) = Z(S i ) .
1.1.1.2/ Triangulation
La méthode d'interpolation par triangulation consiste
à diviser le champ en triangles disjoints, dont les sommets sont les
sites échantillonnés, puis à interpoler à
l'intérieur de chaque triangle.
La construction des triangles n'est pas unique,
différentes approches sont donc proposées.
Triangulation de Delaunay
On peut à partir du diagramme de Thiessen, en
construire le dual. C'est à dire construire un nouveau
diagramme où cette fois, on relie par un segment toutes les paires de
sites dont les régions de Thiessen correspondantes sont adjacentes (les
points séparés par une arête de Thiessen).
|
Polygone de Thiessen
Polygone de Delaunay
|
Figure 1.2
On observe que la triangulation de Delaunay opère
seulement dans l'enveloppe convexe des sites d'observations et ne recouvre donc
pas entièrement le champ.
Interpolation linéaire
Supposons que le point S à estimer se trouve
à l'intérieur du triangle formé par les sites
S1,S2, S3 (figure 1.3).
L'estimation de la valeur de la variable régionalisée au point S
par interpolation linéaire s'écrit :
+
+
S S S
123
à
Z S
( )
S SS
1 2
Z S
( )
3
SSS
1 3
Z S
( )
2
S SS
2 3
Z S
( )
1
où |.| désigne la surface et Z(.) la valeur prise
en (.).
|S2SS3|
|S1SS2|
S
|S1SS3|
S3
S1
S2
Figure 1.3
L'interpolation linéaire a les propriétés
suivantes : - l'estimation en S0 est unique
à
- l'estimation est exacte : ? i = 1 ... n Z(
S i ) = Z(S i )
- la triangulation ne permet pas d'extrapoler les valeurs
au-delà de l'enveloppe convexe des sites d'observation.
1.1.2 / Méthodes d'interpolation
barycentriques
Les méthodes d'interpolations précédentes
ne considèrent, pour estimer la valeur d'un site S0, que les
sites d'observation immédiatement voisins. Elles ignorent par
conséquent une grande partie de l'information disponible. Les
méthodes barycentriques permettent de prendre en compte un nombre plus
important de données.
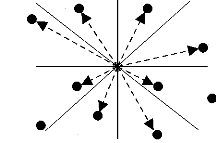
1.1.2.1/ Plus proches voisins
Le plan sur lequel se situe le point à interpoler est
découpé en octants. La méthode de calcul consiste en une
interpolation sur les huit points de référence les plus proches
du point à interpoler, répartis dans les octants. L'importance
d'un point de référence est d'autant plus grande dans le
résultat du calcul que sa distance au point à interpoler est
faible.
P8(v8)
P1(v1)
P2(v2)
Pi(vi)
P3(v3)
P7(v7)
8
)
d Pi Pm
( ,
? ?
vk
1
8
=
k
1
m
m k
?
=
vi
8
8
)
d Pi Pm
( ,
? ?
1
=
k
1m
m k
?
P6(v6)
P5(v5)
P4(v4)
L'algorithme est efficace lorsque l'on dispose de beaucoup de
points bien répartis dans la fenêtre de calcul.
On peut imaginer découper l'espace en plus ou moins huit
parties et prendre plus qu'un point observé par partie. C'est en cela
que l'on se rapproche de la méthode qui suit.
1.1.2.2/ Méthode de l'inverse des distances
La première étape est d'effectuer une recherche
des sites qui vont intervenir dans l'estimation. On peut par exemple se fixer
un rayon de recherche dont le centre est la localisation de la valeur à
estimer. On ne retiendra que les sites Si appartenant au cercle.
Dans un deuxième temps on attribue à chaque site
Si retenu un poids inversement proportionnel à la distance
entre ce site et le point à estimer S0. Considérons que
l'on a retenu n0 données dans le cercle alors on obtient comme
estimateur :
Z S
( )
i
S S
-
i 0
à
Z S
0 0 1
S S
-
i 0
?
i = 1
où |.| désigne la distance.
Les deux méthodes précédentes ont
l'inconvénient de prendre en compte uniquement la distance qui
sépare les sites entre eux. Cela donne un poids important au groupement
de données, alors qu'il n'est pas nécessairement
justifié.
1.1.3/ Résumé
Les méthodes ci-dessus ont la caractéristique de
traiter uniquement les données de la variable étudiée.
Toutes définissent la valeur recherchée en un point comme une
combinaison linéaire pondérée des mesures disponibles.
Ce sont des méthodes implémentées dans la
plus part des logiciels de Système d'Information Géographique
(SIG).
Ces techniques présentent néanmoins des
défauts. Elles ignorent la structure spatiale de la variable et
produisent du coup des surfaces interpolées très lisses. Des
situations locales très spécifiques peuvent alors être
omises (zones de fortes ou de très faibles valeurs). Nous prenons le
risque d'aboutir à des cartes peu réalistes. Enfin, aucun
critère statistique pour juger de la précision de ces cartes
n'est formulé.
Si l'on veut optimiser la précision des estimations, il
faudra utiliser d'autres outils qui feront appel à des modèles
probabilistes. La géostatistique et le krigeage en font partie. Nous
allons les étudier dans la suite.
1.2/ Modèles d'estimation géostatistique
Le mot géostatistique est un néologisme
forgé à l'École des Mines. La géostatistique est
née des problèmes rencontrés dans le secteur de la mine :
contrôle des teneurs, optimisation de maille, cartographie des
ressources, prévision des réserves récupérables,
étude de scénarios d'exploitation...
Daniel Kriege, géologue dans les mines d'or, proposa
dans les années 60 une méthode statistique pour estimer la teneur
d'un bloc de minerai à partir d'échantillons pris autour du bloc
à exploiter. Dix ans plus tard, Georges Matheron développa un
outil pour analyser la continuité spatiale des teneurs appelé le
« variogramme » et une méthode d'estimation basée sur
le « variogramme » appelée le « krigeage ». Nous
étudierons ces deux méthodes.
Aujourd'hui, la géostatistique s'exprime dans des
champs d'applications comme l'océanographie, la
météorologie, le génie civil, l'environnement, la
géologie, la qualité de l'air et des sols, la santé,
etc.
Techniquement, la géostatistique utilise
également une combinaison linéaire des
données
observées, mais à la différence des
méthodes classiques d'interpolation, elle tient compte à
la
fois de l'information relative à leur position et du
caractère aléatoire du phénomène
étudié. De
plus, elle permet d'intégrer des informations auxiliaires
dans l'estimation. Ces avantages font considérablement améliorer
les estimations dans le contexte spatial.
La mise en oeuvre de la méthode de krigeage passe par
une étape d'analyse des données. Elle est destinée
à décrire la structure spatiale de la variable
régionalisée. La carte de l'interpolation est alors
accompagnée d'indicateurs de fiabilité des résultats.
Chapitre II : Méthodes de la
géostatistique linéaire
La géostatistique se réfère aux
méthodes d'analyse probabiliste pour étudier des
phénomènes corrélés dans l'espace appelés
phénomènes régionalisés. A ce titre elle fournit
différents outils pour répondre au problème posé
par la cartographie du socle rocheux dans le golfe du Morbihan.
1/ Notations et définitions
1.1/ Notion de variable régionalisée et
notion de champ
Une variable régionalisée quantifie des grandeurs
mesurées sur l'espace géographique. L'espace dans lequel cette
variable prend ses valeurs est appelé champ.
Exemple de variable régionalisée : la profondeur
du substratum sous le niveau zéro de la mer, mesurée par des
campagnes sismiques dans une zone géographique située à
l'est de l'île aux Moines, dans le golfe du Morbihan.
Exemple de champ : la zone géographique située
entre la côte et l'est de l'île aux Moines. Nous pourrons estimer
les valeurs prises par la variable régionalisée dans cette
zone.
1.2/ Notations
Z : la variable régionalisée
D : le champ (domaine sur lequel la variable
régionalisée est définie) s ? D : une
position dans le champ
Z(s) : une valeur prise par la variable
régionalisée au point s
Z à ( s ) : une estimation de
Z(s)
h : la distance qui sépare deux points
Z(s2)
Z(s3)
Z(s1)
Niveau Zéro
Profondeur à estimer
Bathymétrie
Sédiments
Roche
14
Prenons un exemple dans le golfe du Morbihan
si est un l'emplacement géographique.
Tous les si ont une profondeur de roche :
Z(si).
Chaque profondeur de roche est une variable aléatoire.
Ensemble elles forment une fonction aléatoire de s.
La mesure faite au point si est une
réalisation particulière de la fonction aléatoire
Z(si).
Définissons à présent les hypothèses
indispensables pour utiliser les techniques de la géostatistique
linéaire.
2/ Hypothèses de base
Une fonction aléatoire {Z(s), s ?
D} est caractérisé par sa loi spatiale F. Elle
correspond à la loi de probabilité conjointe de (Z(s1),
Z(s2), Z(s3), ..., Z(sn)).
F v v v P Z s v Z s v Z s v
( , ,..., ) ( ( ) ), ( ( ) ),..., ( ( ) )}
= { < < <
1 2 n 1 1 2 2 n n
Or cette fonction est très complexe par
l'infinité des combinaisons possibles. Nous n'allons donc pas pouvoir
estimer la fonction de distribution conjointe. La géostatistique
linéaire se limite à la fonction de distribution d'ordre un
F(v) et d'ordre deux FZ(si),Z(sj)(vi,vj) .
FZ (s ) ( v) = P{ Z
(s ) = v}
F i
( ) , ( ) ( , ) { ( ( ) ) , ( ( ) )}
=
Z s Z s i j
v v P Z s v Z s v
= =
i i j j
j
i ? j i=1,...,n et j=1,...,n
La première nous permet de calculer l'espérance de
la fonction aléatoire Z en un point s.
E ( Z ( s )) = v
·
fZ(s ) (v)dv
avec ( ) ' ( )
f Z ( s ) v = F Z ( s
) v
La fonction de distribution d'ordre deux, fourni la loi de
probabilité entre les valeurs prises en deux sites si et
sj. On utilise la covariance pour quantifier le degré de
ressemblance entre les valeurs prises en si et sj et le
variogramme pour mesurer la dissemblance entre les valeurs prises aux sites
si et sj.
cov( s i ,s ) = E(Z
( s i ) Z ( s j )) -
E(Z ( s i )) E ( Z (s j
))
ã( s i , s j ) =
Var Z s i Z s j
1 [ ( ), ( )] , (variogramme*)
2
Le problème qui se pose est que la variable
régionalisée est observée qu'une seule fois à un
endroit précis. En d'autres termes, nous n'avons qu'une seule
réalisation de la variable aléatoire. Or pour estimer les moments
d'ordre un et deux il nous faudrait un grand nombre (>30) d'observations. Ce
problème ne concerne pas la quantité d'information disponible
mais le fait que l'on essaie de décrire un phénomène
unique (profondeur au toit du socle rocheux), qui ne se répète
pas, à l'aide de lois de probabilités.
Pour palier à ce problème nous posons comme
hypothèse que la variable régionalisée est stationnaire.
Concrètement cela veut dire que deux paires de points espacés
d'un même vecteur h ont des caractéristiques (moyenne et
covariance) semblables. Ou encore, la variable régionalisée ne
dépend pas de sa position dans l'espace, elle garde les mêmes
caractéristiques
* ã : cigle retenu pour désigner le variogramme
où que l'on se place. Cela nous permet de nous
détacher de la localisation et de nous restreindre uniquement à
la distance qui sépare les points d'observations.
La traduction mathématique est la suivante :
Stationnarité du second ordre :
Une fonction aléatoire Z(s) est stationnaire du
2nd ordre quand l'espérance mathématique existe et ne
dépend pas du point s ; et que la covariance entre chaque paire ( Z(s+h)
, Z(s)) existe et ne dépend que de h (distance).
- L'espérance mathématique ne dépend pas de
s : ? s , E(Z ( s )) = m
constante indépendante de s
- La covariance entre Z(s) et Z(s+h) ne dépend
que de h :
? s s h
, + , cov ( ( ) , ( ) ) ( )
Z s h Z s C h
+ = ne dépend que de h et non de s
C(h) est appelé fonction de covariogramme
- La variance existe en tout site s et est une constante
indépendante du site s :
? s Var ( Z s ) ( Z s Z s ) C
cons te
, ( ) cov ( ), ( ) (0)
= = = tan
- Le covariogramme et le variogramme sont liés :
? s s h Var Z s h Z s
, + , ( ( ) ( ) ) / 2 ( ) (0) ( )
+ - = ã h C C h
= -
Remarque : L'hypothèse de stationnarité d'ordre
deux ne peut être validé de manière rigoureuse et
infaillible à l'aide d'un test statistique sur les données
expérimentales (Arnaud et Emery, 2000 p.107).
L'hypothèse intrinsèque :
On dit qu'une fonction aléatoire Z(s) est
intrinsèque quand ses accroissements Z(s+h)-Z(s)
sont stationnaires d'ordre 2. C'est-à-dire que
- L'espérance des écarts est zéro :
E ( Z ( s + h ) -
Z(s )) = 0 ? s et h fixé
- La variance des écarts ne dépend que de h
:
Var Z s h Z s E Z s h Z s
( ( ) ( )) [ ( ( ) ( ))2 ] 2 ( )
+ - = + - = ã h
Cette hypothèse permet de dire que la variabilité
entre les valeurs prises en deux points différents ne dépend que
de h (la distance entre ces points).
Toute fonction aléatoire stationnaire d'ordre deux est
également intrinsèque (la réciproque est
fausse).
Autrement dit, l'hypothèse de stationnarité intrinsèque
est moins restrictive que la
stationnarité du second ordre. L'hypothèse
intrinsèque ne requiert pas de connaître l'espérance ni sa
covariance de la variable aléatoire.
La fonction la plus utilisée en géostatistique
pour décrire la continuité spatiale est le variogramme. La
continuité spatiale est réalisée lorsque les valeurs
prises entre deux sites proches l'un de l'autre sont similaires.
3/ Variogramme
3.1/ Variogramme théorique et variogramme
expérimental
D'après Marcotte (cours de «géostatistique
minière »), la nature n'est pas entièrement
imprévisible. Deux observations situées l'une près de
l'autre devraient en moyenne se ressembler davantage que deux observations
éloignées. La différence entre les valeurs prises par deux
variables aléatoires est Z(s)-Z(s+h). C'est également
une variable aléatoire dont on peut calculer la variance. Cette variance
devrait être plus petite lorsque les points sont rapprochés (les
valeurs se ressemblent plus en moyenne) et plus grande lorsque les points sont
éloignés. On appelle variogramme la demi-variance de cette
différence.
|
ã
|
( h ) = Var Z s + h - Z
h
1 ( ( ) (
2
|
))
|
L'outil mesure la « variabilité spatiale »,
c'est-à-dire la dissemblance entre les valeurs en fonction de leurs
séparations. Il décrit la continuité spatiale de la
variable régionalisée.
Le variogramme théorique est défini comme :
|
1
1
+ - = [
h Var Z s h Z h E
ã ( )
= ( ( ) ( ))
2 2
|
( ( ) ( ))2 ] (0) ( )
Z s h Z s C C h
+ - = -
|
avec C (0) = Var(Z( s )) et
C ( h ) = Cov(Z( s + h
),Z ( s ))
Démonstration :
h Var
1
( ) =
( Z s Z s h
( ) ( )
- + )
ã
2
1
2
E Z s Z s h
[ ( ( ) ( ) ) 2 ] [ ( ) ( ) ]2
1
- + - E Z s Z s h
- +
2
or dans le cas d'une variable aléatoire stationnaire,
E[Z(s)-Z(s+h)]=0
|
1 E
2
|
[( Z s - Z s + h ( ) ( ) )
2]
|
( )
h Var
=
( Z s Z s h
( ) ( )
- + )
1
ã
2
1 [ ( ) (
) ( )
( ) ]
Var Z s
- Z s Z s h Var Z s h
2
( ) 2 cov ( ), ( )
+ +
+
or si Z est stationnaire d'ordre deux alors
Var(Z(s))=C(0)=constante
C (0) - C(h )
Remarque :
- Un variogramme peut se calculer non seulement pour une
distance donnée mais
aussi pour direction è donnée :
ãè (h)
- La covariance mesure la ressemblance entre les valeurs en
fonction de leur éloignement alors que le variogramme mesure la
dissemblance entre les valeurs en fonction de leur éloignement.
- Dans l'hypothèse de stationnarité d'ordre 2,
covariance et variogramme existent et sont liés par la relation ã
( h ) = C(0) - C(h ) . Dans
l'hypothèse intrinsèque, seul le variogramme existe. C'est
pourquoi il est généralement préféré
à la covariance pour décrire et interprété la
structure spatiale du phénomène étudié.
- Le variogramme réel d'une fonction aléatoire
est généralement inconnu, mais il peut être
évalué à partir des données
d'échantillonnages. On obtient ainsi le variogramme expérimental
proposé par Matheron (1962).
1
2 ( ) N h
N h
( )
[ Z s i h Z s i
( ) ( )
+ - ]
2
?=
i 1
à
ã ( )
h
Effet pépite :C0
Palier :
C
C0+C
12
semi-variogramme
14
10
4
8
6
2
0
0 5 10 15 20
distance : h
Portées : a
N(h) est le nombre de paires dans la classe de distance h.
Z(si) est la profondeur de la roche au point de mesure si.
3.2/ Propriétés du variogramme
Le variogramme est une fonction de h, croissante et
souvent caractérisé par quatre paramètres :
- l'effet pépite : C0 - le palier : C+C0
- la portée : a
Remarque : plus la fonction croit, moins les observations se
ressemblent.
L'effet de pépite : Le comportement à
l'origine du variogramme reflète le degré de
régularité spatiale de la variable régionalisée. Si
le variogramme présente un saut abrupt à l'origine (effet de
pépite), cela indique une absence partielle de corrélation entre
les valeurs prises en deux sites très proches. C'est-à-dire qu'il
y a une faible ressemblance entre les valeurs régionalisées
très voisines.
Le palier : Valeur du variogramme pour la distance
égale à la portée.
La portée : Distance où deux observations
ne se ressemblent plus du tout. Leur covariance est nulle.
Remarques :
- Si le variogramme est borné alors la covariance existe
et l'on peut présumer une stationnarité du second ordre (Journel
et Huijbergts, 1993 p.37).
- Si la variable régionalisée est stationnaire du
second ordre alors le palier est égal à la variance de cette
même variable.
ã ( h ) = ó 2-
C(h )
- Inversement, si un variogramme est non borné, il ne
possède ni portée, ni palier. La variance de la fonction n'est
pas définie et elle n'est donc pas stationnaire du second ordre.
- Arnaud et Emery (2000, p.126) affirment que le variogramme
expérimental n'est pas fiable pour des distances supérieures
à la moitié du diamètre du champ D. Elles sont
peu nombreuses et augmentent la variance de la valeur ãà (.)
estimée.
- Les variogrammes directionnels permettent de détecter
une éventuelle anisotropie. (cf. § 3.4)
3.3/ Modélisation du variogramme
Le variogramme expérimental n'est pas défini
partout, notamment aux distances h pour lesquelles il n'existe pas de
paire de points de mesures. Ainsi lui est-il ajusté une fonction
mathématique appelée modèle de variogramme. Marcotte
recommande d'utiliser des modèles éprouvés ou des
modèles construit à partir de modèles
éprouvés.
Type de modèles courants
|
- Linéaire :
|
ã ( )
h
|
? ??
??
|
C
C + h pour a h
= = 0
0
a
C C pour h a
+ >
0
|
? 3 h 3
h ?
?? C C
+ ? -
? ?
0 a
? ?
3
h = 2 2 a
pour a h
= = 0
pour h a
>
- Sphérique : ã ( )
?? C C
+
0
|
- Gaussien : ã ( h ) = C0
+ C ? 1- exp
?
|
?
-3ah22
?? ?
|
|
?
- Exponentiel : ã ( h ) = C0
+ C? 1- exp
?
|
? - 3h ? ?
?? ?? ?
a ?
|
3.4/ Isotropie et anisotropie
Le variogramme ne dépend que de h,
c'est-à-dire le vecteur de déplacement entre les points s
et s+h. Ce vecteur contient de l'information sur la distance
entre ces deux points, par l'intermédiaire de sa norme, ainsi que sur
l'orientation de h. Si le variogramme ne dépend en fait que de
la norme de h, il est dit isotrope. S'il dépend aussi de la
direction (è) du vecteur de translation, il est dit
anisotrope.

Rappelons que la norme euclidienne d'un vecteur
h=(si,sj) est |h|= 2
s i+ s j .
2
Bien qu'il existe une très grande variété
d'anisotropie, la plupart des ouvrages de géostatistique montrent
uniquement comment modéliser les anisotropies
géométriques.
Les caractéristiques de l'anisotropie
géométrique sont :
- Les variogrammes des différentes directions ont le
même palier et même effet pépite mais des portées
différentes.
- Les portées maximales et minimales s'observent selon
deux directions orthogonales.
Pour revenir à une situation isotrope, le principe
consiste à effectuer une transformation linéaire des
coordonnées spatiales c'est-à-dire une rotation en suivant les
directions de plus petite et plus grande continuité (application chap.
IV § 1.3).
3.5/ Cas multivarié : calcul des variogrammes
croisés
Nous avons vu qu'un des avantages des méthodes
géostatistique (chap. I § 1.2) était de pouvoir inclure dans
le modèle d'interpolation des variables auxiliaires qui apportent de
l'information sur la variable cible. Pour décrire la structure de
dépendance entre la variable cible et les covariables il convient de
calculer le variogramme croisé.
Soit Zp la variable principale et Zq
la variable secondaire, alors
|
à
ã
|
( h) 1
2N( h)
|
N(h )
?= [
i 1
|
Z p (s i ) - Z
p ( s +h) ][ Z q (s
i ) - Zq ( s +h)]
i
|
L'analyse du variogramme croisé se fait de la
même façon que celle du variogramme simple. C'est-à-dire
que l'on relève ses propriétés (effet de pépite,
palier, porté, amplitude) et on y ajuste une fonction.
4/ Krigeage
Cette section expose l'une des techniques de
géostatistique d'estimation locale, connue sous le nom de krigeage et
cokrigeage ordinaire.
Nous cherchons à estimer la valeur d'une variable
régionalisée z (profondeur au substratum) en un point
s0 quelconque du champ à partir des mesures observées
z(si), i=1,..,n (n : nombre de points observés). Le
krigeage est un interpolateur exact (la valeur estimée sur un point de
mesure est égale à la valeur du point de mesure) et optimal (il
minimise la variance sur l'erreur d'estimation).
Il existe trois types de krigeage : le krigeage simple, le
krigeage ordinaire et le krigeage universel. Le krigeage ordinaire est le plus
fréquemment utilisé en pratique car les hypothèses de
départ sont moins contraignantes que celle du krigeage simple. Seul le
krigeage ordinaire sera développé ici car il répond aux
besoins de notre problématique.
4.1/ Hypothèses et contraintes
Le krigeage ordinaire ne requiert pas la connaissance de
l'espérance de la variable régionalisée. Autrement dit, on
se place dans l'hypothèse d'une stationnarité intrinsèque.
Il n'en reste pas moins que la moyenne doit rester constante à
l'échelle du voisinage de krigeage.
Définition du voisinage de krigeage : Domaine du champ
qui contient le site à estimer et les données utilisées
dans l'estimation.
Comme pour les méthodes barycentriques (chap. I §
1.1.3), le voisinage de krigeage se résume à un cercle ou
à une ellipse autour du point à estimer.
Le modèle de base de cette méthode s'énonce
comme suit :
Z ( s ) = ì (s) + ä
(s)
avec s D (le champ),
ì(s)=E(Z(s)) quasi-constante inconnue et
ä(s) fonction aléatoire stationnaire intrinsèque
d'espérance nulle (E(ä(s))=0) et de structure de
dépendance connue (ã(|si-sj|) connu). Dans son
mémoire (2005, p.31), S. Baillargeon explique que le caractère
quasi-constant de ì(s) signifie que
l'espérance n'est pas contrainte à demeurer la même partout
dans le champ D. Elle doit par contre rester constante à
l'intérieur de chaque voisinage de krigeage.
En outre, l'estimateur du krigeage ordinaire doit vérifier
les propriétés suivantes :
à
La linéarité : Z (
s0 ) est une combinaison linéaire des données
Z(si) i=1,..,n.
n n
1
Z s a
à ( 0 ) = + ? ù ( ) avec ?
i Z s i ù =
i
i =1 i=1
Le non-biais : Zà (
s0 ) est sans biais : E[ Z à (
s 0 ) - Z(s 0) ] = 0
Démonstration
à
E(Z ( s 0) -Z
(s 0 ))
E(a + ? ùi
Z(s i) -Z(s0))
i
E ( a + ? ùZ(s
i)) -E(Z ( s 0))
i
or E( Z (s i ) ) =
E( Z (s0)) ì
(stationarité)
= a + ? ù iE(Z
( si))-ì i

x 1- a=ì =
n ? ù ?i ? i = 1 ?
Or ì étant inconnue, le seul
moyen de garantir le non-biais de l'erreur est de poser :
n
a= 0 et ?ù= 1
i 1
Optimalité : c'est-à-dire que Var
( Zà ( s0 ) -
Z(s 0)) est minimale.
Var Z(s 0 ) ) = (2( s
0 ) - Z(s0 )) 1 = E(
2( s0 ) 2) - 2E[ 2( s
0 ) Z ( s 0 )] + E( Z
(s0) 2)
ì 2
2
n n n n n
E( Z ( s 0 ) 2)
=E0),Z(si) ? E w
iwiE(Z (si)Z (s
j)) =? ? ùiùj
cov(Z(s i ), Z ( s
j))+
i=1 i= 1 i==
1 1
j
car dans le cas d'une variable aléatoire stationnaire,
E(Z(si))=E(Z(sj))=ì, d'où
E(Z(si))E(Z(sj))=ì2

2
E( Z (s 0 ) 2) =
Var
(Z( s
+ ì
E[
n n n
2( s 0 ) Z ( s
0 ) ] = i Z(s i ) Z (
s0 ) -?1 = iE( Z
(s )Z ( s 0 ) ) = i cov(
Z(s i), Z ( s 0)) +
ì2
i = 1i=1 i = 1
donc
Var ( 2( s 0 ) -
Z(s 0 )) = Var(
Z(s0 ) ) - ù i
cov(Z(s i ), Z ( s 0
)) + ? ? ùiù j cov(Z(s ),
Z ( s ))
n n n
i= 1 i= 1 j= 1
n
Le but est de trouver le vecteur ù qui minimise
cette variance sous la contrainte ?=ù =
i 1 i 1
Pour y parvenir, on peut utiliser la méthode de Lagrange.
La fonction de Lagrange :

n n n n ?
L = Var Z s
( ) ? (
( ) 2
- ) ? = ? = (
+ ù ù Z s Z s ) ?
? -
( , ,..., )
ë ù ù cov ( ), ( )
ù Z s Z s cov ( ) , ( ) + ë ù 1
1 n 0 i i 0 i j i j ?? i
??
i = 1 i 1 1
j i = 1
ë est le multiplicateur de Lagrange
Minimiser cette fonction revient à trouver la solution du
système :

1
j
1
ù i
ë
0
+
n
Z s Z s
( ), ( ) ) + ? ù ( )
i j cov ( ) , ( )
Z s Z s
0 i j
n
?
1
i
=
n ) = - cov(
? L
(ë , ù1,...,ù
?
ùi
?
Ce système peut se réécrire à l'aide
du variogramme ã(h)=C(0)-C(h)
n
-
-
-
ù
ë
(si
ã
)
)
(si
s0
jã
1
? i = 1, ... , n
1
ù i
?
=
i
?
j
sj
n
?
1
La variance minimum est atteinte au point :
n
ó 2 (ok 0 ) = ?ùiã (
si - s0)- ë
i= 1
Cette fonction est appelée variance de krigeage. C'est la
valeur minimale de la variance de l'erreur de prévision.
4.2/ Estimateur de krigeage
Le krigeage est un interpolateur linéaire sans biais.
Il prend en compte la géométrie des données, les
caractéristiques de la régionalisation et de la variance. Son but
est de lisser les données.
Ayant calculé les poids ùi par la
résolution du système précédent, nous pouvons
écrire l'estimateur de la manière suivante :
n
à
1
?=
i
Z1 ( s0 ) =
ù i Z(s i)
4.3/ Cas multivariable : Cokrigeage
Il est possible d'améliorer les estimations obtenues
par krigeage en ajoutant à la variable à estimer, l'information
fournie par d'autres variables (variables secondaires). La démarche
à suivre est la suivante.
Pour estimer la variable Z1 au point s0, on
utilise une combinaison linéaire pondérée des mesures
concernant toutes les autres variables (Z2, ..., Zp).
p n i
Z( s0 ) = ? ? ù j i i j
i
Z s
( , )
,
i= 1 j=1
Les poids ùj,i sont solution du système
:
j i
,
ù
?
?
?
?
?
?
?
? ?
?
i = =
1 j
?
j
j
p
ni
n1
1
1
ù
ni
1
j
ù ã - - = - =
j i i q i q j q
s s
( ) ë ã
q q i q
( s s q p
) 1 . . .
, , , , , 0
,
1
=
0 i=2...
1
p
Les ëq sont des multiplicateurs de
Lagrange.
Remarques :
- La variance d'estimation (ou de krigeage) obtenue par
cokrigeage est toujours inférieure à celle obtenue par
krigeage.
- En pratique, on observe que le gain est moindre lorsque les
variables sont peu corrélées entre elles (Arnaud et Emery, 2000,
p.195).
- L'estimation ponctuelle par (co)krigeage en un site
d'observation est égale à la
valeur mesurée. D'autre part, la variance d'estimation
associée est nulle.
4.4/ Conclusion
La méthode de krigeage est
précédée par l'estimation d'une fonction variographique.
C'est cette fonction qui va tenir compte à la fois de la
géométrie des données, des caractéristiques de la
régionalisation et de la précision de l'estimation. Il est donc
important de souligner que la qualité de l'estimation et
l'appréciation de sa précision reposent uniquement sur le
modèle variographique utilisé. Il doit par conséquent,
être le plus cohérent possible avec ce qui a été
observé.
Après avoir décrit les fondements
mathématiques des méthodes d'interpolation spatiale, nous nous
efforçons, dans les chapitres suivants, à les appliquer sur des
cas concrets.
Chapitre III : Recueil et analyse préalable de
l'information
Les données observées constituent la
matière première des méthodes d'interpolation. En
géostatistique elles ont la particularité d'être
géo-référencées. L'objet de ce chapitre et de
présenter la zone du golfe du Morbihan retenue pour appliquer les
méthodes d'interpolation géostatistique, puis de présenter
les données utilisées pour aboutir à une cartographie du
socle cristallin.
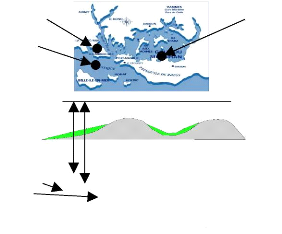
1/ Localisation de la zone d'étude
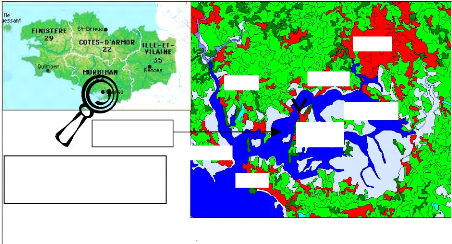
Le Golfe du Morbihan :
Une petite mer intérieure d'une superficie de 11 500
ha.
Zone d'étude
Locmariaquer
figure 3.1 : source IFEN
Arradon
Baden
Arzon
pointe
Île
Île aux Moines
Île d'Arz
Vannes
La zone d'étude se localise entre l'île aux
Moines et Baden dans le golfe du morbihan. Le passage étroit entre la
pointe de l'île aux Moines et le continent provoque des courants
importants (figure 6.2). Ils sont à l'origine de formations
sédimentaires hétérogènes. La charge de
sédiments et la force du courant génèrent de
l'érosion et modèlent le fond marin. Les courants assurent la
mise en mouvement des particules sédimentaires, ce qui entraînent
l'érosion et l'entretient des chenaux. La proximité de la zone
d'étude à l'atlantique fait que les conditions hydrodynamiques y
sont importantes par rapport aux secteurs à l'est de l'île aux
Moines. Elles expliquent les profondeurs bathymétriques de l'ordre de 10
à 15 mètres et des fonds marins rocheux ou sableux.
2/Source des données
Le golfe du Morbihan a fait l'objet de campagnes
bathymétriques et sismiques. L'évaluation de la profondeur de la
roche dans le milieu marin, s'appuie sur ces relevés. Une partie du
travail consiste à relever l'information apportée par les
données sismiques (support papier), et de l'intégrer dans un
Système d'Information Géographique. Les données
bathymétriques sont quant à elles ajoutées à la
base d'information. Le tout constitue un échantillon de travail.
2.1/ Informations provenant des campagnes sismiques
2.1.1/ Recueil des données sismiques
La sismique est une technique de mesure qui consiste à
enregistrer en surface des échos issus de la propagation dans le
sous-sol d'une onde sismique (figure 3.2). Ainsi les
hétérogénéités du sous-sol sont
relevées. Le passage par exemple d'une couche rocheuse à une
couche sédimentaire va se traduire par la présence d'un
réflecteur sur les enregistrements (figure 3.3).
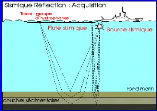
Figure 3.2 (Ifremer)
Le temps d'arrivée de l'écho permet
d'enregistrer la profondeur des obstacles rencontrés par l'onde. En
résumé, les études sismiques fournissent une image
(profil) de la structure du soussol. On peut y reconnaître la
superposition de certaines couches de roche et/ou de sédiment (figure
3.3).
La profondeur du fond marin et du substratum est
relevée (au décimètre) tous les 70 mètres (figure
3.4). Le profil fourni les profondeurs en « seconde temps double ».
C'est-à-dire le temps que l'onde envoyée par l'appareil met pour
revenir à ce dernier. Cette unité peut être convertie en
mètre. La vitesse de propagation de l'onde est de 1500 m/s dans l'eau et
de 1700 m/s dans les sédiments.
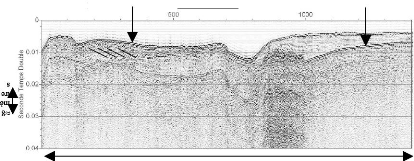
0 marin
Fond marin Profil sismique Toit du substratum
Réflecteur
1000 mètres
Gaz
Couche sédimentaire
Figure 3.3
Conversion du profil sismique en données
numériques
|
0 100 200 300 400 500 600 700 800 900 1000 1100 1200 1300
1400
|
|
|
|
|
|
|
|
|








0
-2
-4
-6

Profondeur
-8
-10
-12
-14
-16
-18
|
Z Eau Z Sed m
P tir Z_Roche_m
|
Figure 3.4
Remarque : les données récoltées peuvent
manquer de précision. Les problèmes suivants sont
rencontrés :
- Lors de la saisie sur papier avec un décimètre,
une erreur de un à deux millimètres est courante (1mm saisi
correspond à 18cm de profondeur réelle).
- La conversion de seconde en mètre amène
à faire un choix sur les arrondis.
- Le niveau zéro autrement dit le niveau de la mer
n'est pas connu pour les profils en notre possession. Il faudra admettre qu'il
est approximativement égal au niveau de référence
utilisé par le SHOM (Service Hydrographique et Océanographique de
la Marine).
2.1.2/ Plan d'échantillonnage
Une campagne sismique permet d'obtenir des informations sur la
nature et la géométrie de la couverture sédimentaire. Pour
rendre une collecte de données efficace, le rapport INERIS (2003, p.52)
conseille de disposer les échantillons selon un maillage
régulier. A nombre d'échantillons égal, la
régularité de la maille facilite l'inférence de la
structure spatiale et garantie une meilleure précision. Toujours
d'après le même rapport, il est prouvé que la variance de
l'erreur d'estimation d'un échantillonnage aléatoire
stratifié est inférieure à celle d'un
échantillonnage aléatoire uniforme. (On peut retrouver ces
affirmations dans l'ouvrage de M. Arnaud et X. Emery, p113.)
En pratique, il n'est pas toujours possible de relever
l'information suivant un maillage régulier comme le préconise la
théorie. En effet, les nombreux bancs de sable du golfe ne permettent
pas aux bateaux de naviguer partout.
Dans tous les cas, il est préconisé de resserrer
la maille d'échantillonnage en quelques endroits, afin de faciliter la
modélisation du variogramme aux petites distances. C'est pourquoi nous
ajoutons aux données sismiques :
- des points de la base bathymétrique (chap. III §
2.2) mesurés sur des zones de roche (figure 3.5).
- des points d'experts, estimés visuellement par des
personnes familiarisées avec le terrain (figure 3.5).
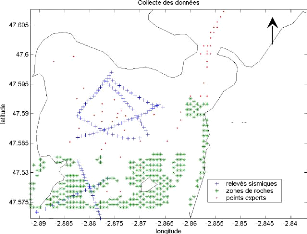
Profil_34 Profil_08
Profil_09
Profil_13
Profil_10
Profil_11 Profil_12
Port Blanc
Ile aux Moines
N
Figure 3.5
Le nombre de points a également son importance. Un
nombre de points trop faible rend le variogramme « instable » et les
résultats de l'estimation peu fiables. Selon Cressie (1993, p.237) 30
paires de points par classe de distance seraient nécessaires à la
construction du variogramme. Dans le cas étudié nous disposons en
moyenne de plus de 100 paires de points par classes de distances (cf. chap.IV,
§ 1).
2.2/ Bathymétrie : Information auxiliaire
Un modèle numérique de terrain (MNT) est une
représentation de la topographie (altimétrie et/ou
bathymétrie) d'une zone terrestre. En cartographie les altitudes sont
habituellement représentées par des courbes de niveaux. Le MNT en
notre possession (source SHOM) utilise un maillage régulier carré
de 50 mètres. Il permet ainsi de reconstituer une vue en image de
synthèse du terrain (figure 3.6, image LIDAR : LIght Detection And
Ranging).
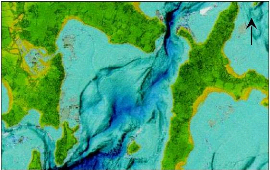
N
Figure 3.6
La morphobathymétrie reflète très souvent
la morphologie au toit du socle cristallin (D. Menier, géologue). En
effet la corrélation linéaire entre la profondeur des fonds
marins et celle au substratum est de 0,84. Le MNT peut donc fournir
une information complémentaire lors de la mise en oeuvre du
modèle de cokrigeage.
3/ Etude exploratoire de l'échantillon de la
variable d'intérêt
La mise en oeuvre des techniques d'estimation
géostatistique exige une analyse préalable des données
expérimentales. L'étude exploratoire a pour but
d'apprécier la distribution des données dans l'espace,
d'appréhender leur degré d'homogénéité, de
rechercher et de visualiser les observations atypiques ou tout simplement de se
familiariser avec la variable.
Il est ici rappelé que la variable d'intérêt
étudiée est la profondeur à laquelle nous atteignons la
roche en milieu marin (le toit du socle cristallin ou substratum).
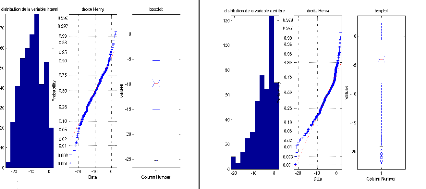
3.1/ Histogrammes et statistiques descriptives
L'étude de l'histogramme permet :
- d'apprécier la variabilité des données
- de détecter d'éventuelles valeurs aberrantes.
La droite d'Henry : si les probabilités sont
alignées le long de la droite d'Henry, nous pouvons supposer que la
variable suit une distribution gaussienne.
Le box plot est une autre façon d'appréhender la
distribution de la variable. Il a l'avantage de mettre en valeur les quartiles.
Les quartiles Q1, Q2 et Q3 sont les éléments essentiels de ce
graphique. Le quartile Q2 (ou médiane) partage la série de
données en deux groupes d'effectifs égaux. Le quartile Q1 partage
le groupe dont les valeurs sont inférieures à la médiane,
en deux groupes d'effectifs égaux. Q3 fait de même pour le groupe
dont les valeurs sont supérieures à la médiane.
La distribution des profondeurs au toit du socle cristallin
(rocheux) est représentée par les trois graphiques de gauche de
la figure 3.8. Ils montrent que les valeurs sont comprises entre 2
mètres au-dessus et 25 mètres en dessous du niveau zéro
(référence SHOM). L'étendue de 27 mètres peut nous
paraître importante. Mais en y regardant de plus près, on
s'aperçoit que la moyenne et la médiane sont toutes deux
égale à -10 mètres. Il en résulte que 1/4 des
valeurs sont comprises entre -5 et -10 mètres et qu'un autre quart entre
-10 et -15 mètres. Sachant qu'il n'y a qu'un très petit nombre de
valeurs supérieures à zéro ou inférieures à
-20 mètres, on peut parler d'une distribution équitablement
répartie sur son étendue (25% des valeurs sur 5 mètres
d'étendue).
La droite d'Henry et un test de normalité
(Kolmogorov-Smirnov) montrent que la distribution des profondeurs au toit du
substratum ne suit pas une loi Gaussienne. Par contre le coefficient
d'asymétrie (cf. tableau du bas) et l'histogramme permettent de penser
qu'elle s'en approche.
Si la propriété de normalité a l'avantage
de définir complètement la distribution par sa
moyenne et son
écart type, elle n'est pas une condition obligatoire en
géostatistique linéaire.
Celle-ci ne fait aucune
hypothèse particulière sur la distribution des valeurs. Toutefois
d'après
C. Cressie (Statistics for Spatial Data, 1993 p.110), le krigeage
a tendance à fournir de meilleures prévisions lorsque les
données suivent une loi normale.
Q3
Q2
Q1
Valeurs extrêmes
Profondeur au toit du socle cristallin
Valeurs du MNT
Figure 3.8
A titre d'exemple, l'histogramme des valeurs du MNT n'est pas
symétrique. D'un côté, 75% des profondeurs se regroupent
entre +2 mètres et -8 mètres (10 m d'amplitude) et de l'autre
coté, 25% des valeurs s'étendent entre -8 mètres et -22
mètres (14 m d'amplitude). Certaines valeurs extrêmes apparaissent
autour des -20 mètres de profondeur. Alors pour estimer le MNT, Cressie
recommande soit une transformation des données par une fonction
mathématique pour rendre la distribution gaussienne, soit
discrétiser en zones géographiques afin que les profondeurs dans
chaque zone soient proches les une des autres. Chaque zone géographique
est alors traitée individuellement.
Principales statistiques relatives aux deux variables
|
Variable d'intérêt
|
Variable Secondaire
|
|
Minimum
|
-25,3
|
-21,8
|
|
Maximum
|
2,1
|
2,3
|
|
Moyenne
|
-9,9
|
-5,1
|
|
Médiane
|
-9,9
|
-4
|
|
Ecart-type
|
6,1
|
5,2
|
|
Variance
|
36,8
|
27,7
|
|
Coefficient d'asymétrie
|
-0,08
|
-0,9
|
Le coefficient d'asymétrie conforte le fait que la
variable d'intérêt a une distribution presque symétrique.
Enfin, le coefficient de corrélation linéaire entre les deux
variables est égal à 0,84 ce qui indique une forte
dépendance entre les variables.
3.2/ Comportements directionnels : Etude de
stationnarité
Pour étudier le comportement dans l'espace des
variables observées, un outil exploratoire synthétique consiste
à visualiser les valeurs des variables le long des directions de
coordonnées.
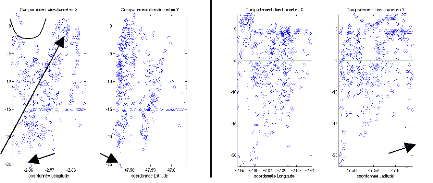
(Est-Ouest) (Sud-Nord) (Est-Ouest)
(Sud-Nord)
Valeurs atypiques
Moyenne
Moyenne
Valeurs atypiques
Comportement directionnel de la variable d'intérêt
Comportement directionnel de la variable secondaire
Figure 3.9
Le tracé de l'évolution des profondeurs en
fonction de la longitude (axe Est-Ouest) et de la latitude (axe Sud-Nord) est
un moyen de détecter la présence d'une dérive spatiale
qui, si elle existe, devrait se traduire graphiquement par une croissance ou
une décroissance du nuage de points.
Le nuage de points de la variable d'intérêt
(figure 3.9 de gauche), est relativement homogène autour de la moyenne
dans la direction SN, en revanche les valeurs ont une légère
tendance à augmenter lorsque l'on se dirige de l'est vers l'ouest. Une
hypothèse de stationnarité serait adéquate dans la
direction sud-nord (tendance linéaire de pente nulle), mais pas
forcément dans la direction est-ouest, pour laquelle la moyenne n'est
pas constante. On pourrait avoir recours à l'hypothèse de
stationnarité intrinsèque pour décrire son comportement le
long de cette direction.
La variable MNT semble quant à elle être
stationnaire au regard de son comportement directionnel (nuage de point
relativement homogène et dispersion à peu près constante
le long des directions principales).
Les valeurs atypiques indiquées sur la figure 3.9 sont
pour certaines de fortes profondeurs dues au canal causé par le passage
étroit entre l'île aux Moines et le continent au nord de la zone
d'étude. Nous décidons de conserver ces données pour la
suite de l'étude. Mais d'autres sont des incohérences entre la
source des données sismiques et celle du MNT. Elles se localisent autour
du profil 34 (figure 3.5) situé dans une zone rocheuse. Les points
proches à valeurs discordantes sont supprimés.
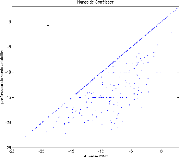
3.3/ Nuage de corrélation différée ou
« h-scatter plots »
Pour un vecteur de séparation h donné,
le nuage de corrélation différée est le nuage des points
formés par les couples de valeurs (z(si), z(si+h)) ; z(si)
représente la profondeur de la roche au point si.
Pour que cet outil soit pertinent, il faut que les observations
soient équitablement réparties sur
l'ensemble du champ. Plus
les valeurs prises aux sites si et si+h sont semblables, plus
le nuage
est proche de la première bissectrice ; au contraire, plus
ces valeurs sont différentes, plus le nuage est diffus.
Le nuage de corrélation différé est donc un
outil qui représente la structuration des valeurs pour une certaine
séparation (h).
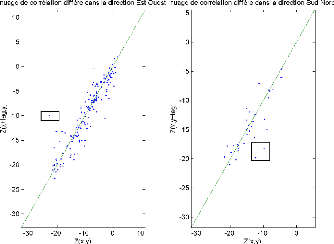
Figure 3.10
Dans notre exemple la distance moyenne au voisin le plus
proche est d'environ 50 mètres. La figure 3.10 nous montre les nuages de
corrélation différée pour un vecteur de séparation
de longueur 50 mètres (plus ou moins 5 mètres) orienté
dans la direction est-ouest et sud-nord. Les valeurs prises aux sites
séparés par 50 mètres dans l'axe est-ouest se ressemblent
plus que celles prisent dans l'axe sud-nord. La corrélation est de 0,9
contre 0,8 pour l'axe SN.
Certains points se détachent particulièrement du
nuage ; un examen détaillé à l'aide de la figure 3.6
(carte LIDAR : LIght Detection And Ranging), révèle que ces
valeurs proviennent de zones de profondeur très localisées comme
dans le chenal.
Nous pouvons déduire des « h-scatter plots »,
que l'écart moyen entre la valeur prise en un site si et un
autre en si+50 mètres se rapproche de zéro sur l'axe
horizontal comme sur l'axe vertical. L'analyse variographique nous confortera
dans cette hypothèse.
3.4/ Description bivariée
Il est important d'examiner la relation entre la variable
auxiliaire et la variable d'intérêt. Pour ce faire, les techniques
disponibles (coefficient de corrélation, covariance, graphiques)
requièrent des couples de données aux points d'observations
s1 à sn. Etant donnée que la
variable régionalisé auxiliaire n'a pas été
observée en ces points, une interpolation spatiale doit être
préalablement effectuée afin de prévoir ces valeurs
régionalisées.
Le MNT (variable auxiliaire) est connu sur un quadrillage d'un
espacement de 50 mètres. Il
en résulte que la distance maximum
qui sépare une observation de la variable principale à la
plus proche observation de la variable secondaire est de moins
de 50 mètres. Cette distance est très petite à
l'échelle du champ. C'est pourquoi nous avons décidé
d'utiliser la méthode d'interpolation des plus proches voisins. Les
voisins les plus proche seront les plus représentatifs de la
donnée à estimer.
Ceci fait la figure 3.10 montre la dépendance
linéaire des deux variables. Les points alignés sur la
bissectrice sont les points correspondant aux zones de roche (non couvert d'une
couche sédimentaire). Nous leur avions effectivement attribué la
profondeur donnée par le MNT.
Le coefficient de corrélation entre la variable
d'intérêt et la variable auxiliaire est de 0.84. Mais si on ne
prend pas en compte les points des zones de roches ce coefficient décent
à 0,75.
Tous les points
Sans les zones de roche

Y=0,75X-7,45
Figure 3.11
La droite de régression linéaire est alors
définie comme suit :
Y=0,75X-7,45
Y : Profondeur au toit du socle cristallin X : Profondeur
à la surface du fond marin
4/ Transformation des coordonnées
Les coordonnées des points sont en longitude, latitude de
projection WGS84. C'est un système géodésique dont
l'unité est exprimée en degrés.
Projection WGS84 : une
projection est une correspondance entre les points de la terre et ceux de la
représentation plane. La projection WGS84 est un système
universel, mais il en existe un grand nombre suivant l'endroit où l'on
se place sur le globe.
Pour revenir à un système de coordonnées
planes (une unité en ordonné égale une unité en
abscisse), dans le but de calculer une distance euclidienne nous appliquons une
transformation sur les coordonnées.
Longitude = longitude*cos(latitude*ð/180°) Latitude
= latitude
1 degré (longitude / latitude) 111,2 km
5/ Conclusion
L'étude exploratoire nous a permis de nous familiariser
avec les données. Elle montre comment la distribution de la profondeur
au toit du socle cristallin se rapproche d'une loi gaussienne. Il existe bien
une relation forte entre cette profondeur et celle du fond marin. Enfin, les
nuages des valeurs le long des directions de coordonnées et les nuages
de corrélations différées permettent de vérifier la
ressemblance des profondeurs dans un rayon de 50 mètres autour d'une
observation. Il faut à présent étudier plus
précisément la structure spatiale de la variable
d'intérêt. C'est l'analyse variographique qui va y
répondre.
Chapitre IV : Analyse variographique
L'analyse variographique est l'étape préalable
au krigeage. Le manque d'observations de la variable à prédire,
l'abondance d'information de la variable auxiliaire et l'information de
position (longitude/latitude) pour chacune des observations, nous ont
emmené à choisir l'interpolation par « krigeage ».
L'analyse variographique est menée afin d'estimer la
fonction de la continuité spatiale de la variable
d'intérêt. Dans ce chapitre nous présentons les
variogrammes expérimentaux selon diverses directions, l'étude du
comportement à courte distance et enfin l'ajustement d'un
modèle.
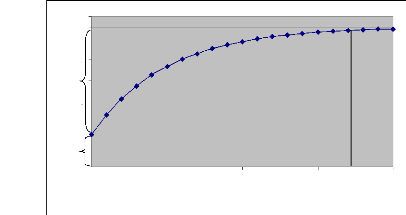
1/ Variogrammes expérimentaux
1.1/ Variogramme omnidirectionnel
Le variogramme caractérise la continuité
spatiale de la variable régionalisée. Sur la figure 4.1, on
trouve le variogramme expérimental omnidirectionnel, calculé pour
des distances multiples d'un pas de 50 mètres. L'intervalle de confiance
à 95% accordé à chaque point est indiqué
par une barre verticale. Cet intervalle de confiance est fonction de la
variance et du nombre de paires de points intervenant dans le calcul des points
expérimentaux.
Variogramme Omnidirectionnel Zoom sur 1/2 de la distance
maximale
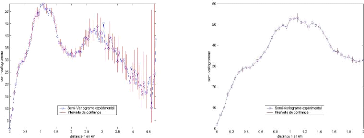
Figure 4.1
En supposant que la distribution
Z(si)-Z(si+h) pour i=1 à n, suit une
loi gaussienne de moyenne nulle et de variance
2ã(h), on a 2 ( )
n 2 à ( )
ã h qui suit une loi du chi 2
à n degrés de
ã h
libertés. L'intervalle de confiance à á=95%
de la variance est alors donné par :
?
??
) ?
??
n ã h n h
2 à ( ) 2 à
(
ã
2
÷1
2
;
÷ á
á / 2 / 2
n : nombre de paire de points intervenant dans le calcul
des points expérimentaux
ã à ( h ) : valeur du point
expérimental à la distance h (cf. formule estimation du
variogramme) ÷2á : fractile
d'ordre á de la loi du ÷2 à n
degrés de liberté
Avant même de regarder plus précisément
les intervalles de confiances, Arnaud et Emery (2000 p .126) recommandent de ne
tenir compte dans le calcul du variogramme expérimental, que les
distances allant jusqu'à la moitié de la distance maximale
rencontrée entre deux points du champ (cf. figure 4.1 de droite).
Au-delà, le nombre de couples de points intervenant dans le calcul du
variogramme décroît et lui fait perdre en robustesse (cf. chap. II
§ 3.2).
Le variogramme omnidirectionnel atteint un palier à une
distance de 1100 mètres. On peut en déduire que la variable
régionalisée (profondeur au toit du substratum) est une
réalisation d'une fonction aléatoire stationnaire d'ordre 2 (M.
Arnaud et X. Emery, 2000 p.122 / Journel et Huijbergts, 1993 p.37).
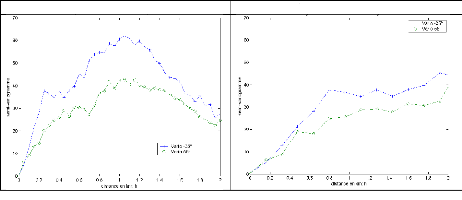
1.2/ Variogrammes directionnels
La figure 4.3 montre les variogrammes directionnels, le long
des quatre directions principales du plan, d'orientation -35°, 55°,
100° 145° par rapport à la direction est-ouest. Ces directions
ont été choisies en fonction de l'orientation des profils 13 et
12 (cf. figure 3.5) et de la géographie observée sur l'image
LIDAR (figure 4.2).
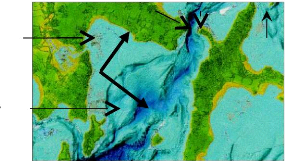
embouchure
pointe
N
baie
dunes
55°
-35°
Figure 4.2
La bathymétrie de la zone d'étude montre une
continuité spatiale dans la direction 55°. On remarque que si l'on
se déplace sur un axe du sud-ouest au nord-est, la profondeur du fond
marin reste sensiblement la même, alors que si l'on se déplace du
nord-ouest au sud-est on doit faire face à de forte variation de
profondeurs. Cette morphologie est le résultat de la baie formé
au nord-ouest et de l'écoulement de l'eau provenant en grande force le
l'embouchure au nord-est.
Figure 4.3
Les variogrammes de la figure 4.3 sont sensiblement
différents. La différence d'accroissement à l'origine est
le symptôme d'une anisotropie. C'est un paramètre qu'il faut
prendre en compte.
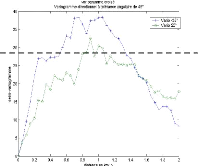
1.3/ Anisotropie
Une anisotropie caractérise un phénomène
qui se déploie préférentiellement dans certaines
directions de l'espace.
Les notions d'anisotropie, de continuité maximale et
minimale peuvent être schématisées de la manière
suivante :
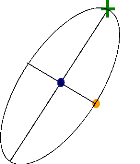
55°
0.56km
-35°
0.175km
Anisotropie : Bien que la distance entre le point central et
celui en direction 55° soit plus grande que celle entre le point central
et le point en direction -35°, les valeurs prises en ces points sont
très proche (la corrélation est la même).
Direction de continuité maximale : direction à plus
forte porté.
On distingue deux types d'anisotropie.
L'anisotropie géométrique : On observe
dans diverses directions des paliers et des composantes pépitiques
identiques mais des portées différentes. Les portées
maximales (ag) et minimales (ap)
s'observent selon deux directions orthogonales (cf. chap. II § 3.4).
L'anisotropie zonale : On observe des paliers
différents selon les directions. Il n'existe pas de modèle
d'ajustement pratique pour traiter ce type d'anisotropie.
En observant la figure 4.3, on remarque que les paliers ne
sont pas identiques. Mais si l'on considère que la variable
régionalisée est stationnaire d'ordre 2, le palier est
approximativement égal à la variance. Les directions de
continuités maximale et minimale sont alors respectivement de 55°
et -35° par rapport à l'axe ouest-est avec une portée de
1100 mètres et 250 mètres.
·
2
Pour prendre en compte l'anisotropie géométrique,
on peut intervenir sur la distance. On peut ainsi évaluer
ã(h,è) en corrigeant la distance h.
?a ?
g
( cos )2
h è è + ?? h è
è
sin ??
? a p ?
Le modèle isotrope avec une portée maximale
ag=1100 mètres est alors
ã(hg).
Distance d'origines
Distances corrigées
Figure 4.4
L'accroissement à l'origine devient sensiblement identique
pour les deux directions principales. La nouvelle définition de la
distance a pour effet d'atténuer l'anisotropie.
· Une autre façon de tenir compte de l'anisotropie
est de faire un changement de repère. Si è est l'angle
de rotation, dans notre cas è=35°, la formule est la
suivante :

?
??
)
)
sin(è
cos(è
- sin( ) cos( )
è è
? ? ?
? ?
y1
y1
x 1
x'
1
' '
·
yi
yi
x i
?
??
xi
? ? ?
? ?
' '
yn
yn
xn
x n
? ? ? ? ?
?
?
?
? ?
De cette façon nous nous replaçons dans un
système de coordonnés redressé de 35° dans le sens
inverse des aiguilles d'une montre. Pour prendre en compte les portées
dans les deux directions on résout le système
? ? ?
ag
·
0
? ? ?
0
? ? ?
? ?
ap
''
x ' '
1
' '
xi
''
xn
ap : portée sur l'axe 0X
ag
: portée sur l'axe 0Y
? ? ?
? ?
? ? ?
? ?
y1
x'
1
' '
xi
yi
? ? ?
? ?
' '
yn
xn
Nouvel axe et unité
Axe et unité d'origine
35°
y1
''
yi
' '
yn
C'est cette seconde méthode que l'on retient pour
l'estimation par krigeage. 1.4/ Comportement à l'origine du
variogramme
Le comportement du variogramme à l'origine, reflète
le degré de régularité spatiale de la variable
régionalisée (cf. chap. II § 3.2).
- Un comportement de ãà ( h ) à
l'origine parabolique indique une grande régularité de la
variable régionalisée (continue et différentiable).
- Un comportement à l'origine linéaire montre que
la variable régionalisée est moins régulière (elle
est continue mais pas différentiable)
- Une discontinuité à l'origine ou effet de
pépite, signale une plus grande irrégularité de la
variable régionalisée. Il y a absence (partielle ou totale) de
corrélation entre les valeurs prises en deux sites très proches.
(Journel et Huijbregts, 1993 p.38).
D'après de la figure 4.1 et 4.3, on constate que les
variogrammes ont un comportement à
l'origine linéaire (
ãà ( h ) 10*h). La profondeur au toit du socle
cristallin est donc une variable
aléatoire continue.
1.5/ Variogrammes croisés
Cov=28,2
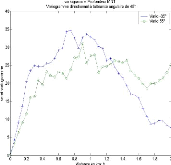
Figure 4.5
Comme dans le cas monovarié, l'inférence
statistique nécessite des hypothèses de stationnarité de
la corégionalisation (ensemble des variables
régionalisées).
Pour analyser les liens spatiaux entre la profondeur du
substratum et la profondeur à la surface du fond marin, la figure 4.5
(de droite) montre les variogrammes croisés selon les directions
principales d'anisotropie. A sa lecture, nous faisons l'hypothèse d'une
stationnarité d'ordre deux car ils atteignent tous deux un palier
environ égal à la covariance.
D'autre part, nous observons que les variogrammes des deux
variables régionalisées et le variogramme croisé se
ressemblent fortement. Ca nous emmène à choisir le même
modèle de base pour leurs ajustements.
2/ Ajustement à un modèle
Le variogrammme expérimental calculé et ses
propriétés étudiées, il faut ajuster une courbe
théorique. Elle doit être définie pour toutes les distances
et toutes les directions de l'espace. Cependant toute fonction
mathématique ne peut être utilisée comme modèle. Un
modèle variographique doit être une fonction de type
négatif conditionnel (Cressie, 1993 p.86) c'est-àdire que :
n n
0
? ? ù ù 2ã ( )
i j s i s j
- =
i = =
1 1
j
n
|
quel que soit {si : i=1,...,n} et
{ùi : i=1,...,n / ?= ù =
i
i 1
|
0}
|
C'est pourquoi le modèle de variogramme est choisi parmi
un ensemble de fonction dont on sait qu'elles sont de type négatif
conditionnel (cf. partie II, chap.3.3).
Remarque : quel que soit le mode d'ajustement retenu, la
modélisation du variogramme aux courtes distances est
particulièrement importante.
2.1/ Cas monovariable
Des anisotropies dans les directions -35° et 55° ont
été détectées dans le paragraphe 1.3. Il convient
d'ajuster le variogramme dans ces directions. D'autre le palier dans les
directions principales est égal à la variance de la variable
régionalisée, soit 38,6. N'ayant pas observé
d'effet pépite, le comportement à l'origine de la variable
aléatoire régionalisée est linéaire.
Ces observations amènent à choisir entre un
modèle sphérique et un modèle exponentiel. Le
modèle sphérique est préférable, d'une part parce
qu'il s'ajuste mieux sur les points de petite distance du variogramme
expérimental et d'autre part parce qu'après plusieurs essais il
donne de meilleurs résultats.
M. Arnaud et X. Emery montrent que la variance d'estimation
(variance de krigeage) est plus élevée dans le cas du
modèle exponentiel ; l'explication vient du fait que ce dernier
croît plus rapidement que le modèle sphérique, ce qui
traduit un phénomène qui se déstructure plus vite,
d'où une moins grande précision dans l'estimation.
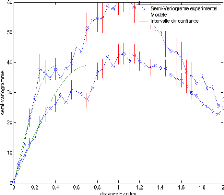
Direction -35°
Direction 55°
Figure 4.6
Le modèle choisi pour les deux directions s'écrit
:
? 3
3 h h ?
h ?? 3 8,6 × ? -
? ?
( ) = 3
a
? 2 2 a ?
??
ã
3 8,6
0
a h
= =
pour
>a
pour h
a identifie la portée ;
a= 0.399 km dans la direction -35° a= 0.699 km
dans la direction 55°
Remarque : L'estimation du paramètre de la portée
se fait en résolvant le problème :
|
L à min n
= ? ? ?= ù
? ? i 1
|
i
|
2 ?
( ã h i ã h i
à ( ) ( )
- ) ?
? ?
|
n : longueur du vecteur h
ãà ( hi ) : valeur
estimée du variogramme pour la distance hi
ã(hi) : valeur de la fonction
variographique pour la distance hi
ùi : poids accordé à la distance
hi ( les poids sont inversement proportionnels à la
distance).
D'autres fonctions variographiques ou paramètres
d'ajustement auraient pu être choisis. C'est pour cela qu'il est
nécessaire de contrôler la qualité du modèle
d'ajustement. On effectue à cette fin une validation croisée.
Pour tester les résultats de la validation
croisée, nous comparons ceux obtenus pour le modèle
précédent et ceux obtenus pour le modèle variographique
qui ne tient pas en compte l'anisotropie (cf. figure 4.7).
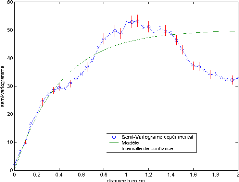
Figure 4.7
|
ã ( ) 50 1 exp( h
h ? -
= × - )
?? 0.412
|
?
??
|
2.2/ Validation croisée
D'après le rapport INERIS (2003), la validation
croisée doit être réalisée avant d'entreprendre le
krigeage. Elle fournit des critères statistiques de sélection
dans le choix d'un modèle de variogramme.
La validation croisée consiste à éliminer
temporairement un point de l'ensemble des données puis à estimer
sa valeur par krigeage à l'aide des données restantes et du
modèle de variogramme qui a été ajusté. Cette
opération est répétée pour tous les points.
Ainsi en tout point d'observation si, est
calculé par krigeage, avec le modèle variographique
à
retenu, une valeur estimée Z (
si ) et un écart-type de krigeage
óok(si). Le rapport INERIS
recommande alors de calculer :
à
- la moyenne et la variance de l'erreur d'estimation (Z(si)-
Z ( si ) ),
n 2
- l'erreur quadratique moyenne (EQM= ?= [
1 Z s i Z s i
( ) à ( )
- ] )
n 1
i
à
- la moyenne de l'erreur relative (100*[Z(si)- Z (
si ) ]/ Z(si)),
à
- la moyenne et la variance de l'erreur standardisée
([Z(si)- Z ( si ) ]/ óok(si)),
à
- le coefficient de corrélation entre Z(si)
et Z ( si ) .
La qualité du modèle est d'autant meilleure que
:
- la moyenne des erreurs d'estimation et des erreurs
réduites (standardisées) est plus proche de 0, ce critère
assure l'absence de biais,
- la variance des erreurs d'estimation est plus faible, ce
critère traduit la robustesse de l'estimateur et renseigne sur la
précision de l'estimation,
- la variance des erreurs standardisées est plus proche
de 1, ce critère indique que
l'écart-type de krigeage reflète correctement la
précision de l'estimation,
- la moyenne des erreurs relatives est plus proche de 0, ce
critère traduit la bonne
précision de l'estimateur,
à
- la corrélation entre Z(si) et Z (
si ) est plus proche de 1 et le nuage de
corrélation
plus resserré.
L'application aux données :
|
N=441
|
Modèle avec anisotropie
|
Modèle isotrope
|
|
Erreur Quadratique Moyenne
|
3,34
|
3,18
|
|
Moyenne des erreurs d'estimation
|
-0,01
|
-0,001
|
|
Ecart-type des erreurs d'estimation
|
1,83
|
1,78
|
|
Moyenne des erreurs relatives
|
-22,16 %
|
-21,18%
|
|
Moyenne des erreurs standardisées
|
0,003
|
0,0007
|
|
Ecart-Type des erreurs standardisées
|
0,66
|
0,63
|
|
Coefficient de corrélation
|
0,95
|
0,96
|
|
% de données dont l'erreur
standardisée est inférieure à 2,5
|
99
|
96
|
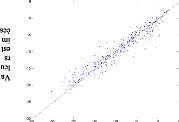
Modèle anisotrope
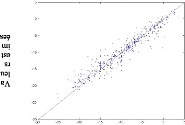
Modèle isotrope
Vraies valeurs Vraies valeurs
Nuage de corrélation entre valeurs vraies et
estimées
Figure 4.7
Les nuages sont concentrés le long de la
première bissectrice, ce qui indique une bonne précision des
estimations. Les deux modèles rendent une estimation globalement sans
biais, les erreurs d'estimation ne s'écartent pas fortement de 0.
D'après Arnaud et Emery (200, p.156), pour valider un modèle on
espère au moins 95% de données dont l'erreur standardisée
est inférieure à 2,5. C'est le cas pour les deux modèles.
Les écarts-types sont proches de 1, les erreurs relatives
n'excèdent pas 23%. En revanche quelques fortes profondeurs sont sous
estimées.
Il est également intéressant de localiser les
erreurs d'estimation. La figure 4.8 nous les montre.
Embouchure Pointe de l'île
|
|
|
|
Erreur d'estimation du modèle anisotrope
|
Figure 4.8
|
Erreur d'estimation du modèle isotrope
|
Les cartes montrent que l'on estime mal aux endroits à
fort dénivelés (à l'embouchure au nord) et certains points
au sud-est. Ces erreurs sont dues à des incohérences entre
sources de données différentes (MNT et Sismique, cf. chap. III
§ 2.1.2).
Après application des deux modèles, le
géologue a préféré les résultats obtenus par
le modèle à anisotropie.
3/ Conclusion
Dans ce chapitre nous avons exposé les bases de
l'analyse variographique et les avons illustrées par une étude de
cas réel. La recherche d'un modèle convenable est assez
délicat et nécessite une certaine expérience ou de
nombreux essais. C'est une procédure qui ne peut être
automatisée. Elle nécessite également les connaissances du
géologue ou de l'expert sur le terrain pour valider la
véracité du phénomène observé
(régularité spatiale, variabilité à courtes
distances et anisotropie).
Chapitre V : Estimation par krigeage
L'étape de l'estimation par krigeage est relativement
rapide si l'étude variographique a été correctement
menée. Il ne s'agit ici plus que de définir une grille
d'estimation et un voisinage de krigeage (cf. chap. II, § 4.1).
L'estimation par krigeage peut alors être entièrement
automatisée.
1/ Choix de la grille et du voisinage de krigeage
Nous avons choisi la même grille que celle
proposée par le SHOM pour représenter le MNT. Elle facilitera la
comparaison entre la morphobathymétrie et la morphologie au toit du
socle rocheux. C'est une grille régulière de points
espacés d'une distance de 50 mètres. Au regard de
l'échelle de la zone d'étude ( 750 ha), le degré
de détail de cette grille est élevé. Elle permettra de
calculer facilement les courbes de niveaux et de représenter la
géographie au toit du socle cristallin en trois dimensions.
Le choix du voisinage de krigeage est un peu plus
délicat. Le nombre de points inclus dans le voisinage doit être
assez grand pour une estimation de précision. Il dépend
également de la continuité spatiale de la variable
régionalisée. Le modèle variographique doit être
acceptable à l'échelle de ce voisinage. C'est-à-dire qu'il
existe une dépendance spatiale. On pourra tester plusieurs tailles de
voisinage par validation croisée et choisir celle qui donne les
meilleurs résultats. Dans le cas présent nous avons retenu un
voisinage de krigeage d'un rayon de 500m. C'est entre la portée de
continuité maximale et la portée de continuité minimale du
variogramme directionnel.
Enfin, le choix du système de krigeage qui a
été fait est le krigeage ordinaire. Comme nous l'avons
relaté dans le chapitre II, § 4, il ne nécessite pas la
connaissance de l'espérance de la variable régionalisée.
Au lieu de l'estimer, il est souvent préférable de la
considérer comme inconnue car elle peut varier d'une zone à
l'autre du champ. Toutefois, nous rappelons qu'il faut qu'elle reste constante
dans le voisinage de krigeage.
2/ Résultats obtenus par krigeage ordinaire
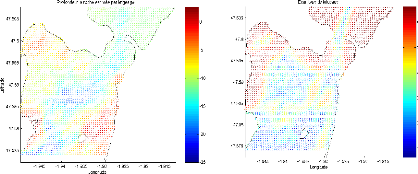
Figure 5.1
La figure 5.1 montre le résultat de l'estimation par
krigeage et l'écart-type de krigeage. Le krigeage utilise le
modèle variographique suivant :
? 3
3 h h ?
3
?? 3 8,6 × ? -
? ?
( )
h = a a
? 2 2 ?
ã
?? 3 8,6
0
a h
= =
pour
>a
pour h
avec une portée (a) qui diffère suivant la
direction (cf. chap.4 prg. 2.1) L'anisotropie est corrigée par un
changement de repère (cf. chap.4 prg. 1.3).
Les profondeurs varient entre 3 et -25 mètres. Une
mesure au-dessus de zéro n'est pas aberrante. Cela vient du fait que le
niveau zéro de référence est le niveau de l'eau au
coefficient le plus fort à marée basse.
L'écart-type de krigeage est un indicateur de la
précision de l'estimation. Il est fiable car l'écart-type des
erreurs standardisé est proche de 1 (cf. validation croisée Chap.
IV § 2.2). Il quantifie la dispersion possible de la valeur vraie, mais
inconnue, autour de la valeur estimée. Par contre, il dépend
uniquement du modèle de variogramme et de la configuration des
données dans le voisinage de krigeage.
A la vue de la figure 5.1, les variations spatiales de
l'écart-type de krigeage indiquent la perte de précision
lorsqu'on s'éloigne des points de mesure. Elles renseignent sur les
zones où l'échantillonnage est suffisamment dense (faible
écart-type, bonne précision au centre et au sud de la zone
d'étude) et sur celles où l'échantillonnage est trop
espacé (grand écart-type, mauvaise précision au nord de la
zone d'étude).
3/ Résultats obtenus par cokrigeage ordinaire
Le cokrigeage renforce le krigeage standard en y ajoutant
l'information apportée par une deuxième variable. C'est un
immense avantage quand l'information de la variable principale vient à
manquer. On peut aussi s'imaginer optimiser les coûts des campagnes
d'échantillonnage en prélevant la profondeur au toit du socle
cristallin uniquement aux endroits à fort volume sédimentaire.
nZ nZ
1 2
Les principes de base du cokrigeage sont les mêmes que
ceux du krigeage. On veut former une estimation linéaire de la variable
principale à partir d'observations de la variable principale et de la
variable secondaire.
Z s
à ( ) = ? ù i Z s
i + ? ù Z s
0 1 ( ) 2 ( )
j j
i =1 j=1
Mais, en plus de créer un variogramme qui
représente les variations spatiales de la variable principale entre deux
points d'observation, le cokrigeage introduit la notion de variogramme
croisé (cf. chap. II § 3.5 ). Tout comme dans le cas du krigeage,
le variogramme croisé est modélisé. Il permet alors de
résoudre les équations qui fournissent les valeurs des
coefficients de pondération en fonction des observations des deux
variables utilisés. De la même manière, une
évaluation de l'erreur d'estimation est disponible en chaque point
d'interpolation. D'autre
part cette variance d'estimation est toujours inférieure
à celle obtenue par krigeage (Arnaud et Emery, 200 p.195).
3.1/ Ajustement du variogramme croisé
Le variogramme croisé quantifie la corrélation
spatiale entre la variable principale et la variable secondaire.
Variogramme directionnel croisé
(Profondeur au toit
du socle rocheux / Profondeur à la surface du fond

Direction -35°
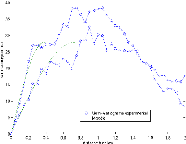
Direction 55°
Figure 5.2
? 3
3 h h ?
h ?? 28 × ? -
? ?
( ) = 3
a
? 2 2a?
??
ã
28
0
a h
= =
pour
>a
pour h
Le palier est égal à la covariance entre la
profondeur au toit du socle cristallin et celle à surface du fond
marin.
a identifie la portée ;
a=0.378 km dans la direction -35° a=0.731 km
dans la direction 55°
3.2/ Validation Croisée
La validation croisée est utilisée pour comparer
deux approches. La première approche est la même que
précédemment, c'est-à-dire que nous avons construit un
modèle variographique à partir de données mesurées
et de données d'expertise. Ces dernières ont été
jugées par un géologue connaissant le terrain (cf. chap. III
§ 2.1.2). Lors du krigeage standard nous avons gardé ces points
pour estimer l'ensemble du champ. Or ce ne sont pas des valeurs exactes. La
deuxième approche propose de bénéficier de l'information
apportée par la deuxième variable sans prendre en compte les
points d'experts lors de l'estimation.
Nous n'avons pas montré la deuxième approche pour
l'estimation par krigeage car les résultats n'en valaient pas la
peine.
Le tableau suivant montre les statistiques de la validation
croisée.
|
N=441 / N=323
|
Estimation avec points experts
|
Estimation sans points experts
|
|
Erreur Quadratique Moyenne
|
2,08
|
1,20
|
|
Moyenne des erreurs d'estimation
|
-0,02
|
-0,01
|
|
Ecart-type des erreurs d'estimation
|
1,44
|
1,09
|
|
Moyenne des erreurs relatives
|
-3,52 %
|
-1,03%
|
|
Moyenne des erreurs standardisées
|
-0,006
|
-0,003
|
|
Ecart-Type des erreurs standardisées
|
0,83
|
0,68
|
|
Coefficient de corrélation
|
0,97
|
0,98
|
|
% de données dont l'erreur
standardisée est inférieure à 2,5
|
98
|
98
|
Les indicateurs statistiques des deux méthodes sont
proches. Néanmoins l'EQM est bien meilleur quand on ne rajoute pas les
points d'expertises. Nous supposons que c'est du aux points d'expertises
difficiles à estimer car ils ne reflètent pas forcément la
réalité.
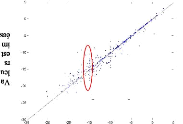
Avec points d'expertises
points d'experts mal estimés
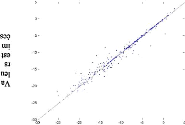
Sans points d'expertises
Vraies valeurs Vraies valeurs
Nuage de corrélation entre valeurs vraies et
estimées (par cokrigeage)
Figure 5.3
La figure 5.3 compare les nuages de corrélations entre
vraies valeurs et des valeurs estimées des deux approches.
Les nuages sont bien plus concentrés le long de la
diagonale que ceux de l'estimation par krigeage, ce qui indique une meilleure
précision des estimations.
Attardons-nous sur le nuage de gauche, un grand nombre de
points d'une profondeur de 15 mètres ont été estimé
entre 10 et 20 mètres. Après une recherche de localisation il
s'avère que ce sont des points d'expertises ; un élément
de plus pour les juger non fiables. Il manque une cohérence entre les
points d'expertises et les points qui les entourent.
La figure 5.4 localise les erreurs d'estimation. Elles sont
moins fortes que celle faites par krigeage. Au lieu de varier entre -8 et 8
mètres elles ne fluctuent plus qu'entre -8 et 4 mètres. Par
contre, les erreurs les plus importantes se localisent toujours aux mêmes
endroits.
Erreurs d'estimations
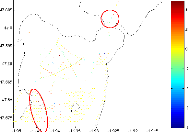
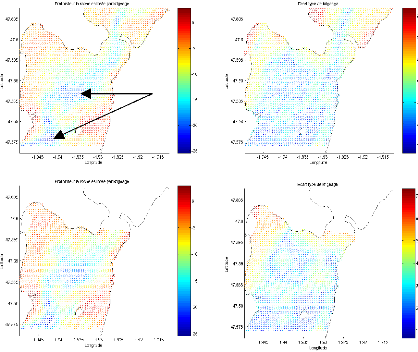
Puits
Sans points d'expertises
Avec points d'expertises
Figure 5.5
Figure 5.4
3.3/ Résultat du cokrigeage
A la vue de la figure 5.5, on s'aperçoit que les
résultats obtenus par cokrigeage sont plus fins que ceux obtenus par
krigeage. Le chenal présente une plus forte rugosité, la
profondeur diminue en s'approchant de la côte et les monticules rocheux
séparant le puits au centre de celui au sud sont plus lisibles.
N'ayant pas de points de mesures au nord ni au niveau de
l'embouchure, le cokrigeage n'a pas pu estimer cette zone sans les points
d'expertises. En revanche nous supposons que l'estimation sans les points
d'expertises, du centre de la zone d'étude, se rapproche plus de la
réalité car nous n'avons pas introduit de biais.
L'écart-type du cokrigeage est plus faible que celui du
krigeage dans une grande partie de la zone d'étude.
En d'autres termes, l'information apportée par la
variable auxiliaire, fortement corrélée avec la variable cible,
permet de compenser en grande partie le manque d'information dû à
un sous échantillonnage de la variable cible. C'est là l'un des
intérêts majeurs du cokrigeage, lorsque les mesures de la variable
cible viennent à manquer ou, qu'il est moins coûteux de
récupérer une ou plusieurs variables auxiliaires que de mesurer
plus largement la variable cible.
Les figures suivantes (figures 5.6) montrent différentes
représentations des résultats obtenus.
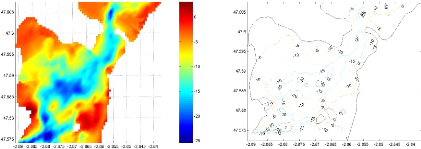
Lissage - visualisation 2D Courbes de niveaux
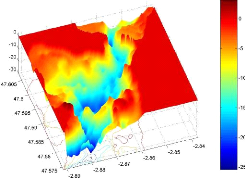
Lissage - visualisation 3D
Cartes des profondeurs au toit du socle rocheux
Figure
5.6
4/ Comparaison graphique avec d'autres
méthodes d'interpolation
A titre de comparaison, nous avons dessiné la carte des
profondeurs au toit du socle rocheux en utilisant les résultats de
quatre méthodes d'interpolation.
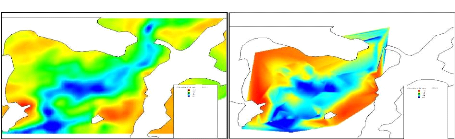
Triangulation Delaunay
Cokrigeage
mètres
mètres
Triangulation Thiessen Inverse des distances
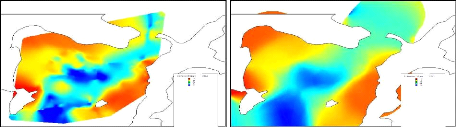
mètres
mètres
Figure 5.7
Les trois méthodes figurants à côté
de celle par cokrigeage sont des techniques d'interpolation
automatisées, intégrées dans des logiciels de
système d'information géographique (SIG). Leurs procédures
de calculs ont été définies dans le chapitre I.
Cette comparaison illustre les résultats des
méthodes déterministes. Ils sont différents, mais
permettent néanmoins une représentation globale du
phénomène à étudier.
Chapitre VI : Les épaisseurs de couches
sédimentaires 1/ Epaisseur de sédiment
L'étude doit permettre d'aboutir à
l'épaisseur des formations sédimentaires. C'est la
différence entre la profondeur des fonds marins et celle au toit du
socle rocheux. La figure 6.1 a été obtenue à partir des
profondeurs au toit du substratum estimées par cokrigeage et des
données bathymétriques délivrées par le SHOM.
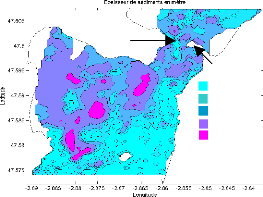
Embouchure
[0-1[ mètre [1-3[ mètres [3-5[ mètres
[5-10[ mètres [10-15[ mètres
Pointe de l'île aux Moines
Figure 6.1
La baie est recouverte d'une couche sédimentaire de 5
à 10 mètres d'épaisseur. Des dunes apparaissent le long
ouest du chenal. Le socle rocheux du sud-est de la zone est dépourvu de
formation sédimentaire.
2/ Courants marins
La répartition, la nature et l'épaisseur des
sédiments, mais aussi la profondeur du substratum, dépendent des
conditions hydrodynamiques.
Huit heures par jour, il se forme un tourbillon au centre
ouest de la zone d'étude (figure 6.2). Les particules de
sédiments en suspension dans l'eau se posent alors au fond et attaquent
la roche. C'est pourquoi d'importantes masses de sédiments sont
constatées.
Les courants en vive eau ramènent les sédiments
entassés au nord de l'embouchure (figure 6.1 et 6.2), pour les
déposer 500 mètres plus bas lorsque l'intensité du courant
s'affaibli. A l'inverse, en morte eau, les courants remontent ces mêmes
masses de sédiments mais qui sont pour une partie stoppés par la
pointe de l'île aux Moines. Ainsi il se forme des monticules de
sédiments juste au sud de cette pointe.
La partie est de la zone est dépourvue de sédiment
car constamment parcourue par les courants.
Les courants étant très faibles dans la baie, les
sédiments stagnent et ont peu d'effet érosif.
Courant en Vive eau à Courant en Vive eau à Courant
en Vive eau à
PM -6h à Port Navalo PM -2h à Port Navalo PM +2h
à Port Navalo
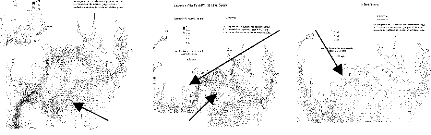
Intensité du courant en m/s
Courant important =>
pas de dépôt
sédimentaire
tourbillon => couche
sédimentaire important
Courant en Vive eau à Courant en Morte eau à
Courant en Morte eau à
PM +6h à Port Navalo PM -2h à Port Navalo PM +2h
à Port Navalo

Figure 6.2
(Source: Modélisation hydrodynamique du GdM - Direction
des études et recherches EDF)
La concentration ou la dispersion de l'énergie
formée par les courants explique les contrastes des fonds marins.
Chapitre VII : Localisation des colonies de
crépidules 1/ Problématique
En sédimentologie, un outil de prélèvement
très utilisé est la benne (figure 7.1). Elle permet d'explorer la
composition des fonds marins.

Benne
Crépidules
Figure 7.1
L'Ifremer définit la crépidule comme un
mollusque gastéropode (crepidula fornicata) originaire
d'Amérique du nord et introduit involontairement en Europe. Elle
s'étend maintenant de la Suède à la
Méditerranée. Son abondance fait qu'elle entre en
compétition alimentaire avec d'autres coquillages. Elle a par ailleurs
un impact sur les fonds qu'elle colonise (dépôts de coquilles et
de déchets, envasement). C'est un mollusque qui a une capacité
extraordinaire de prolifération (jusqu'à 10 000 individus au
mètre carré). Il a déjà colonisé toute une
partie de la côte bretonne
L'objectif de cette présentation est de montrer
qu'à partir d'un semis de points on peut analyser une structure
spatiale*. Chacun des points (prélèvement par bennes)
nous indique la présence ou non de crépidules. La connaissance de
la structure spatiale, nous permet d'utiliser une méthode de lissage
pour créer une carte des zones occupées par les
crépidules. Nous obtenons alors une idée du peuplement de cet
envahisseur dans la zone étudiée.

Zone d'étude
Golfe du Morbihan
île aux Moines
île d'Arz
île Bailleron
île Tascon
2/ Zone d'étude
Pour les besoins de cette étude, les relevés par
bennes sont localisés dans un secteur à un kilomètre au
nord ouest de l'île Tascon. La surface représente un rectangle de
900 mètres d'est en ouest et de 950 mètres du nord au sud. 70
bennes sont relevées sur une surface de 85 ha. Pour chaque
prélèvement on note une présence ou non de
crépidules.
* Structure spatiale : la façon dont les
éléments occupent l'espace
3/ Statistiques spatiales descriptives
Cette partie propose des méthodes d'analyse concernant
uniquement la position des objets, indépendamment de la valeur d'un
attribut de ces objets. On présente des indicateurs permettant de
décrire la concentration ou la dispersion du semis étudié.
Le semis est-il concentré ou réparti avec quel degré de
certitude ?
3.1 Position et dispersion
Intéressons-nous aux bennes à présences
de crépidules. Compte tenu de leur positionnement, le barycentre se
trouve à 200 mètres au sud du point central de la zone
d'étude. C'est une première indication pour dire que les bennes
à présence de crépidules ne sont pas également
réparties sur toute la zone d'étude.
Les trois indicateurs de tendance centrale sont convergents, le
point médian et le point de distance minimale se situent à moins
de 50 mètres du barycentre.
La dispersion standard des crépidules autour du
barycentre est d'environ 350 mètres (distance euclidienne) à vol
d'oiseau. L'ellipse de déviation standard (représente le
coefficient d'asymétrie) est un tout petit peu plus étirée
de l'est à ouest que du nord au sud en raison de la forme de la zone
d'étude. Il est intéressant de constater que 60% des bennes
à présences de crépidules sont comprises dans l'ellipse.
Cela indique une population concentrée dans un espace restreint de la
zone d'étude.
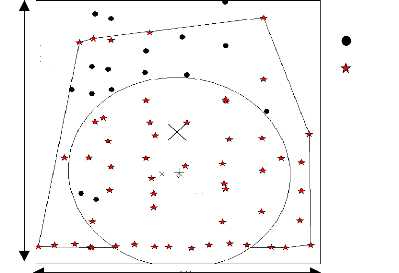
Prélèvements
sans présence de crépidules
avec présence de crépidules
900
mètres
950
Convexe des bennes à présence de
crépidules
Ellipse de déviation
Point médian Barycentre
Distance minimale
Point centrale de la zone d'étude
Zone de prélèvement
mètres Figure 7.2
3.2 Sectorisation
La sectorisation consiste à rechercher des groupes de
sites qui ont la même valeur (présence ou non de
crépidules) et qui minimise la distance entre les sites. C'est une
façon d'examiner si des groupes homogènes se forment.
En regardant la localisation des bennes à présence
de crépidules et celle sans, des frontières apparaissent
naturellement (figure 7.3.1).
La figure 7.3.2 montre une classification en 7 groupes par la
méthode des K points moyens. C'est une méthode fondée sur
la distance (euclidienne).
Figure 7.3.1 Figure 7.3.2
Le principe en est le suivant :
- choisir au hasard K centres provisoires (1)
- regrouper les sites les plus proches de ces centres (2)
- calculer le centre de gravité de chaque groupe
formé (3)
- recommencer (2) et (3) jusqu'à ce que les centres ne
bougent plus.
Les secteurs de la figure 3.2 ont un barycentre qui minimise la
dispersion des bennes à présence de crépidules et celles
sans crépidules.
3.3 Méthode des quadrats
La répartition des bennes à présence de
crépidules peut-elle être assimilée à une
répartition aléatoire à l'échelle de la zone
d'étude ? Est-elle au contraire plutôt répartie ou
plutôt concentrée ?
Qu'est qu'une répartition aléatoire :
Soient (Q1 ,Q2 ,..., Qn) les localisations des n
quadrats, l'hypothèse d'une répartition spatiale
complètement aléatoire est celle issue d'un processus ponctuel
homogène de Poisson et reposant sur deux principes :
- un principe d'uniformité, selon lequel chaque
localisation de la zone d'étude possède la même
probabilité d'être habitée par des crépidules ;
- un principe d'indépendance, en vertu duquel l'occurrence
d'un événement en un lieu n'influence en aucune manière
l'occurrence d'événements en d'autres lieux.
Autrement dit, on suppose que la zone d'étude est
parfaitement homogène et qu'il n'existe aucune interaction entre les
individus localisés. Sous ces conditions, ce modèle purement
aléatoire peut être formalisé au moyen d'une distribution
de probabilités de Poisson.
L'analyse par quadrat dénombre les sites dans les
cellules du carroyage (quadrats) et compare les effectifs observés aux
effectifs théoriques résultant d'une loi binomiale ou de son
approximation par la loi de Poisson (ë=np).
|
On pose un carroyage constitué de 25 quadrats de 48400
m2 (220m x 220m). On va tester deux choses :
- (1) les bennes à présence de crépidules
sont la réalisation d'une distribution spatiale aléatoire,
- (2) les bennes sans présence de crépidules sont
la réalisation d'une
distribution spatiale aléatoire.
|
(1) La densité moyenne est de 2,16 (54/25) bennes
à présence de crépidules et l'écart type est de 1,7
bennes par quadrat.
(2) La densité moyenne est de 0,64 bennes à
présence de crépidules et l'écart type est de 1,03 bennes
par quadrat.
|
Indice
|
Valeur calculée (1)
|
Valeur calculée (2)
|
Interprétation,
la distribution est :
|
|
D (rapport de la variance sur la moyenne)
|
1,34
|
1,67
|
1 : aléatoire
>1 : concentrée
<1 : régulièrement espacée
|
|
ICS (indice de dimension des agrégats)
|
0,34
|
0,67
|
0 : aléatoire
>0 : concentrée
<0 : régulièrement espacée
|
|
GI (indice de Green)
|
0,01
|
0,02
|
0 : aléatoire
1 : très concentrée
|
|
IMC (indice de voisinage
moyen)
|
2,49
|
1,31
|
x : aléatoire
> x : concentrée
< x : régulièrement espacée
|
|
IP (indice d'hétérogénéité)
|
1,15
|
2,05
|
1 : aléatoire
>1 : concentrée
<1 : régulièrement espacée
|
Conclusion, on peut considérer que la
répartition des bennes à présence de crépidules
n'est pas conforme à un processus de Poisson, mais qu'elle manifeste une
concentration. On remarque effectivement une densité est plus forte au
sud qu'au nord.
Les bennes sans présence de crépidules, sont aussi
réparties comme un semis de points concentrés.
La méthode des quadrats présente des défauts
:
- Elle est plus adaptée à l'analyse spatiale
d'une population que d'un échantillon. Elle considère que le
semis et complet sur la zone d'étude. Exemple `localisation des villes
dans une région'.
- Les résultats changent suivant le maillage choisi. Un
maillage plus fin conclura à une répartition aléatoire des
bennes.
- Elle ne prend pas en compte les observations voisines. Comme
indiqué, elle sous-entend qu'en théorie la densité de
crépidules est la même dans tout sous-ensemble de la
région
(quadrat). C'est-à-dire que si la distribution des sites
était répartie de façon régulière il y
aurait une densité de 2.16 sites dans chaque carreau.
La méthode suivante tient compte des observations voisines
et de la distance qui les sépare. 3.4 Analyse spatiale
exploratoire basée sur les distances
Les méthodes suivantes font l'hypothèse que le
semis de point étudié est homogène. C'est-àdire
qu'on suppose que la densité est constante sur toute la zone
d'étude.
3.4.1 Méthode du voisin le plus proche
Elle propose de comparer la distance moyenne d'un point à
son plus proche voisin avec une distance théorique attendue sous
l'hypothèse nulle de distribution aléatoire.
Soit N observations sur un territoire d'une superficie
S. La distance moyenne théorique au

1 S
voisin le plus proche est d0 = =57,83
(S/N : densité du semis de points).
2 N
La distance moyenne à vol d'oiseau entre deux
prélèvements, à présence de crépidules, les
plus proches dans la zone d'étude est de 52 mètres (distance
euclidienne). La distance moyenne attendu théorique entre deux
présences de crépidules dans un semis de points
généré par un processus ponctuel aléatoire de
même densité serait de 57 mètres. La statistique R
est égale à 0,9 (52/57). Elle est à comparer avec
:
- le modèle concentré de référence
qui a une statistique R égal à 0, - le
modèle aléatoire qui a une statistique R égal
à 1,
- le modèle équirépartit dont le R
est égal à 2,15.
Avec un R=0,9 nous nous rapprochons fortement d'une
répartition aléatoire des crépidules.
On peut connaître la région critique d'acceptation
de l'hypothèse nulle. L'intervalle de confiance pour une distribution
aléatoire au risque á=5% de se tromper est :
[
0 1,96 0 ; 0 1,9 6 0 ] [ 49,77 ; 65 ,8 8]
d -
· ó d d +
· ó
d =
0, 26136
avec 4,1 1

ó d = =
0 N S
2 /
Il en résulte que la distribution est significativement
aléatoire, car la distance observée moyenne au voisin le plus
proche (52,19) est comprise dans l'intervalle.
Elle serait significativement dispersée si la distance
observée moyenne au voisin le plus proche était supérieure
à d0 + (1,96
· ó d0) =
65,88 ;
ou significativement concentré si la distance
observée moyenne au voisin le plus proche était inférieure
à d0 - (1,96
· ó d 0 )
= 49,77 pour á=5%.
Remarque : les résultats sont différents de
ceux apporté par la méthode des quadrats.
L'extension de la méthode aux 20 premiers rangs de
voisinage rend les résultats présentés dans le tableau
ci-dessous. La statistique R calculé est croissante avec
l'augmentation des ordres de voisinages. Ce qui montre que plus l'ordre de
voisinage augmente et plus le semis est régulièrement
espacé.
|
Rang de
voisinage
|
Distance au plus
proche voisin
|
Distance
théorique
|
Statistique R
|
|
1
|
52.19
|
57.83
|
0.90
|
|
2
|
88.45
|
86.74
|
1.01
|
|
3
|
112.44
|
108.43
|
1.03
|
|
4
|
136.01
|
126.50
|
1.07
|
|
5
|
155.83
|
142.31
|
1.09
|
|
6
|
171.94
|
156.55
|
1.09
|
|
7
|
190.72
|
169.59
|
1.12
|
|
8
|
212.38
|
181.71
|
1.16
|
|
9
|
226.85
|
193.06
|
1.17
|
|
10
|
239.60
|
203.79
|
1.17
|
|
11
|
254.94
|
213.98
|
1.19
|
|
12
|
265.91
|
223.71
|
1.18
|
|
13
|
276.83
|
233.03
|
1.18
|
|
14
|
287.35
|
241.99
|
1.18
|
|
15
|
297.66
|
250.63
|
1.18
|
|
16
|
309.94
|
258.99
|
1.19
|
|
17
|
320.64
|
267.08
|
1.20
|
|
18
|
333.50
|
274.94
|
1.21
|
|
19
|
344.34
|
282.57
|
1.21
|
|
20
|
354.22
|
290.01
|
1.22
|
D'autre part, si la distance au Kième voisin
le plus proche est plus élevée que la distance théorique
attendue alors le semis de points est régulièrement espacé
à cet ordre de voisinage. Au contraire, une valeur observée
faible indique un semis concentré.
La statistique du voisin le plus proche souffre de
différents défauts. Elle utilise comme aire d'étude le
polygone formé par les points limitrophes et non pas une aire plus large
qui serait donnée par l'utilisateur. Selon Cressie (1993), la
validité du test décline fortement avec l'élévation
de l'ordre K. Il recommande de ne pas dépasser un niveau
K<2,5%N. Or dans notre cas cette valeur est égale à
1,35. Les conclusions de l'extension aux 20 premiers rangs sont donc
à relativiser.
D'un autre côté la méthode des plus proches
voisins est simple à utiliser et ne nécessite pas de
connaître toute la population.
3.4.2 Fonction de Ripley modifiée (L de Besag)
La fonction K de Ripley (1977, 1981) est une
méthode plus récente pour analyser la structure spatiale d'un
semis de points. L'hypothèse de base est que la densité locale
à l'intérieur d'un cercle est égale à la
densité de l'ensemble de la zone d'étude. Le principe est de
calculer la probabilité d'observer un nombre donné de points dans
un cercle de rayon d autour d'un point quelconque de la zone
d'étude. La règle illustrée en figure 7.4 est
répétée pour chacun des points, pour en déduire des
résultats moyens.

Nombre de voisins
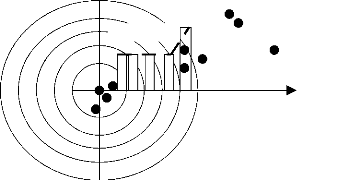
Fonction de Ripley
4
4
4
4
Figure 7.4. Source : François Goreaud -
Cemagref
6
Distance d'analyse R
Sous l'hypothèse nulle de la fonction de Besag, le
semis de points est aléatoire. La figure 7.5 représente la courbe
de la fonction L de Besag et celles des bornes de l'intervalle de confiance de
l'hypothèse nulle.
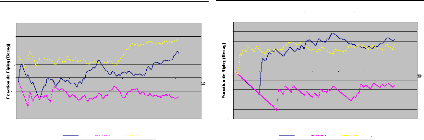
40
30
20
10
0
10
-20
-30
100
80
60
40
20
0
-20
-40
-60
-80
100
Bennes à présences de
Crépidules
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0
|
50
|
100
|
150
|
200
|
250
|
300
|
35
|
|
|
|
|
|
|
|
|
|
|
|
|
|
distance (mètres)
L Besag H0 min H0 max
Bennes sans présences de
Crépidules
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0
|
50
|
100
|
150
|
200
|
250
|
300
|
35
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
distance (mètres)
L Besag H0 min H0 max
Figure 7.5
Lorsque la fonction de Besag est comprise dans l'intervalle de
confiance, on admet que la distribution observée est conforme à
une distribution aléatoire de Poisson. Si la fonction de Besag est plus
élevée que la borne supérieure de l'intervalle de
confiance, alors la distribution est concentrée dans l'espace
d'étude. Lorsque la statistique de Besag est plus faible que la borne
inférieure de l'intervalle de confiance, alors la distribution est
régulièrement dispersée dans l'espace d'étude.
Le calcul de la fonction L de Besag confirme et précise
les conclusions tirées de l'analyse du voisin le plus proche. En effet,
il y une absence d'organisation spatiale significative sur le semis de points
avec présence de crépidules. Toutefois il existe une tendance
à la concentration dans les rayons de 10 mètres et de 160
mètres de distance.
Les bennes sans présence de crépidules sont
significativement concentrées dans un rayon allant de 130 mètres
à 250 mètres.
L'avantage de cette méthode est qu'elle donne de
l'information à plusieurs échelles de distance.
3.5 Conclusion de l'analyse spatiale descriptive
Les méthodes précédentes servent à
tester une hypothèse globale sur la configuration spatiale de la zone
d'étude. Elles permettent de savoir s'il existe un ordre spatial, mais
ne sont pas capables de situer les agrégats.
Les méthodes reposent sur une hypothèse
d'homogénéité de la variable sur la zone d'étude.
Elle est contraignante et ne s'applique pas forcément à notre
cas. Au contraire si l'on observe des crépidules sur un site alors il y
a de fortes chances qu'il y en ait à côté.
Les méthodes n'ont pas été pensées
pour étudier un échantillon mais pour une population connue sur
l'ensemble de la zone d'étude. C'est pourquoi nous les utilisons
seulement dans le but de localiser les zones susceptibles
d'intérêt.
4 / Méthode d'interpolation par
partitionnement de l'espace
Les méthodes d'interpolations suivantes s'appuient sur
une décomposition de la zone d'étude (cf. chap. I). La
méthode de partitionnement la plus fréquemment utilisé est
celle de Delaunay. Elle découle d'un découpage en polygones de
Thiessen.
4.1 Polygones de Thiessen
|
|
Présence de crépidules
|
|
|
|
Figure 7.6
|
|
|
On attribue à tout point appartenant au même
polygone, la valeur du site ayant ce polygone d'influence (cf. chap. I §
1.1).
La validation croisée (cf. chap. IV § 2.2) pour cette
méthode rend 81,08% de bonne réponse. 4.2 Interpolation
par la méthode des plus proches voisins
L'algorithme se base sur une décomposition de l'espace en
polygones de Delaunay (cf. chap. I § 1.1.1.2)
Ayant peu d'observations, et sachant que les crépidules
vivent en colonie, si elles sont
présentes à un endroit il y a
de forte chance que l'on en trouve juste à coté. D'où
l'idée de
découper la zone d'études en une grille
régulière à maille rectangulaire de côté
mesurant 50 mètres. Elle est alors assez fine pour que chaque benne
remontée corresponde à un carreau.
Tout point de la grille appartient à un triangle de
Delaunay. La valeur du point que l'on cherche à estimer sera celle du
sommet le plus proche.
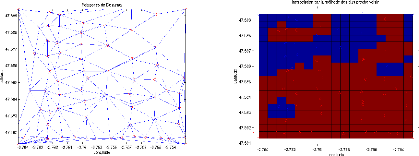
Figure 7.7
La validation croisée (cf. chap. IV § 2.2) pour cette
méthode rend 82,43% de bonne réponse. 5.3 Interpolation
suivant le nombre d'individus comptés
Les méthodes suivantes sont appelées abusivement
des méthodes d'interpolation. Elles sont plus précisément
des méthodes de lissage. Elles permettent de réaliser une
transition entre les régions à valeurs observées
différentes. Elles sont normalement utilisées lorsque les sites
d'observations sont disposés selon une grille
régulière.
Les géologues ont aussi relevé pour certaines
bennes remontées, la quantité de crépidule. Le tableau
ci-dessous donne quelques statistiques sur ces données.
|
Nombre de bennes
|
70
|
Médiane des crépidules comptés
|
25
|
|
Nombre de bennes avec crepidules
|
54
|
Maximum de crépidules dans une benne
|
87
|
|
Nombre de bennes avec comptage de crépidules
|
39
|
Moyenne des crépidules dans une benne
|
29
|
|
Minimum de crépidules dans une benne
|
4
|
Ecart type des crépidules dans une benne
|
19
|
On remarque que la moyenne est de 29 crépidules par
bennes et que 50% des bennes à présence de crépidules
remontent plus de 25 crépidules. D'un autre coté, l'amplitude de
83 crépidules est élevée. Il en découle un
écart type important.
La figure 8 présente les résultats obtenus suivant
quatre méthodes de lissage.
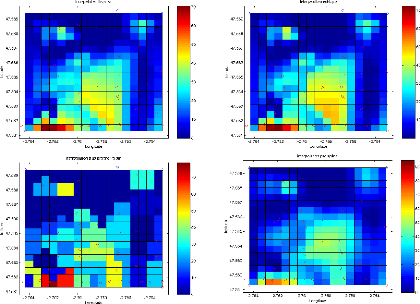
Figure 7.8
- L'interpolation linéaire (cf. chap. I) se base sur la
triangulation de Delaunay. Nous rappelons que l'estimateur pour un point
S inclus dans un triangle S1, S2, S3 s'écrit :
+
+
S S S
123
à
Z S
( )
S SS
1 2
Z S
( )
3
SSS
1 3
Z S
( )
2
S SS
2 3
Z S
( )
1
avec |.| désignant la surface.
- L'interpolation cubique consiste à ajuster à
l'intérieur de chaque triangle de Delaunay une surface dont
l'équation est un polynôme du troisième rang.
|
3 2
Ce polynôme est de la forme : ? ?
Z S Z x y
à ( ) à ( , )
= =
|
á ij x y
i j
|
i j
= =
0 0
- La méthode du plus proche voisin estime le site
S en lui affectant la valeur du site observé le plus proche.
- L'interpolation par splines ne se base pas comme les
précédentes sur une triangulation de la
à
sous la contrainte Z ( S i ) =
Z(S i ) ? i= 1... n
dS
S i + 1
zone d'études. Elle minimise ?( )2
Z S
à ' ' ( )
Si
Remarque : les méthodes cubiques et splines produisent des
surfaces à aspect très lisse alors que les méthodes
linéaires et plus proche voisin présentent des
discontinuités.
Validation croisée des quatre méthodes
présentées :
|
Linéaire
|
Plus Proche Voisin
|
Cubique
|
Spline
|
|
% de bonnes réponses*
|
15,78
|
29,82
|
14,03
|
12,28
|
|
Moyenne de l'erreur d'estimation
|
-0,58
|
-0,54
|
0,07
|
-1,07
|
|
Variance de l'erreur d'estimation
|
14,28
|
17,96
|
14,27
|
15,70
|
|
Erreur quadratique moyenne
|
200,33
|
317,49
|
199,55
|
243,51
|
|
Moyenne de l'erreur relative
|
-0,01
|
-0,01
|
0,001
|
-0,02
|
|
Coefficient de corrélation
|
0,728
|
0,661
|
0,732
|
0,723
|
*% de bonnes réponses à plus ou moins trois
crépidules près.
Le tableau ci-dessus permet de comparer les quatre
modèles à partir de critères statistiques
(cf. chap. 4
§ 2.2). La moyenne de l'erreur d'estimation des quatre modèles est
proche de 0.
Cela montre qu'ils sont sans biais ( E (
Zà ( S ) ) = Z(S ) ). Par
contre ceux ne sont pas des
estimateurs robustes (variance de l'erreur d'estimation
élevée). L'avantage d'un estimateur
robuste est qu'il est
insensible aux valeurs aberrantes. La moyenne de l'erreur relative,
[ Z S - Z S
à ( ) ( ) ]
100 * proche de 0, indique que les interpolations sont d'une
bonne précision.
Z S
( )
Si l'on compare les méthodes d'interpolation, la
méthode cubique rend les meilleurs résultats globaux. Mais si
l'on y regarde de plus près (figure 7.9) on s'aperçoit qu'elle
n'estime pas correctement les sites sans présence de crépidules.
Ils sont mieux estimés par la méthode du plus proche voisin
(PPV).
L'idée qui s'en suit est d'estimer les sites sans
présence de crépidules par la méthode du PPV. Les sites
restant seront estimés par la méthode cubique. Le résultat
se trouve en figure 7.10.

Figure 7.9 : Corrélation entre valeurs observées
et
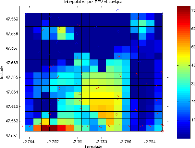
Figure 7.10
5.4 Conclusion
Nous venons de voir quatre méthodes d'interpolations et
il en existe encore un grand nombre. Il est difficile de préconiser une
méthode plutôt qu'une autre. C'est pourquoi il est
conseillé d'utiliser systématiquement la validation
croisée qui donne les moyens de comparer les diverses méthodes.
Les techniques déterministes ont l'avantage de pouvoir être
automatisé, mais à l'inverse du krigeage (méthode
stochastique), elles ne prennent pas en compte la structure spatiale du
phénomène étudié. Leur but est avant tout d'aboutir
à une carte esthétique des valeurs estimées en produisant
des surfaces à aspect très lisse.
Conclusion
L'objectif de ce travail a été de créer
une carte de la bathymétrie au toit du socle rocheux dans la partie
orientale du golfe du Morbihan. A partir d'un semis de 461 points observation,
il était demandé d'estimer la valeur (profondeur de la roche sous
la couche sédimentaire) des points d'une grille de 3611 points. Une
recherche bibliographique a permis d'étudier les bases des techniques
d'interpolations spatiales et notamment celle du krigeage ordinaire. Cette
dernière a été présentée d'un point de vue
théorique et appliquée. Les fondements mathématiques du
krigeage et de son étape préalable, l'analyse variographique, ont
été examinés et discutés. Le choix de cette
méthode a été motivé par le manque de
données disponibles de la variable à interpoler. Le cokrigeage
(généralisation multivariable du krigeage) est une des rares
techniques d'interpolation qui permette d'intégrer des variables
auxiliaires dans la modélisation. Nous avons pu ainsi profiter de
l'information apportée par le modèle numérique de terrain,
fait par le SHOM, pour estimer plus précisément la profondeur de
la roche sous la couche sédimentaire. Toute fois, les estimations
produites auraient pu être encore améliorées par d'autres
variables auxiliaires comme la bathymétrie au début du
XXème siècle ou la force du courant. Mais à
l'heure actuelle, ces données n'existent pas dans un format
numérique exploitable.
Cette application concrète a
révélé l'importance de l'analyse variographique. Elle fait
la force et la faiblesse du krigeage. Elle permet en effet à l'instar
des méthodes déterministes, de modéliser la structure
spatiale de la variable régionalisée (anisotropie,
dépendance et corrélation spatiale entre les observations) ; mais
elle ne peut pas être automatisée. Un mauvais ajustement du
variogramme ne pourra jamais donner de bonnes estimations et entraîne par
ailleurs une mauvaise approximation des erreurs. C'est un point délicat
car l'avantage du krigeage par rapport à d'autres méthodes, est
qu'il permet justement de mesurer la précision de l'estimation
fournie.
Les méthodes déterministes, comme celles
d'interpolation par partitionnement de l'espace, sont automatisées et
peuvent par conséquent être facilement intégrées aux
logiciels de système d'information géographique (SIG). Certaines
permettent d'interpoler des variables qualitatives (méthode du plus
proche voisin, méthode de Thiesen), ce que ne propose pas le krigeage.
C'est ainsi que l'on a pu tracer une carte du territoire occupé par des
crépidules sur la base d'un échantillon de
prélèvements localisés.
Suivant le nombre de sites d'observation, leur dispersion
géographique, les modalités de la variable observée, il se
peut qu'une méthode d'interpolation soit préférable
à une autre. Il n'en reste pas moins que l'utilisateur ne pourra pas
faire l'économie de tester plusieurs méthodes d'interpolation et
utiliser la validation croisée pour valider ses résultats.
Ainsi au fil des chapitres, des méthodes
déterministes et une méthode stochastique, notamment
géostatistique ont été approfondi, illustré et
comparé. C'est ainsi que les objectifs du stage, à savoir
proposer des méthodes pour créer un modèle
numérique de terrain à partir d'un échantillon de
données, ont été atteints.
Il aurait aussi été intéressant,
d'étudier le suivi spatio-temporel de la couverture sédimentaire,
ou encore analyser la propagation des crépidules dans le temps. Des
cartes à différentes époques permettraient de mieux
comprendre le déplacement des sédiments ou crépidules
à l'échelle du golfe et de localiser les zones critiques ainsi
que leurs origines. Malheureusement les données en notre possession ne
sont pas assez détaillées pour profiter de ces techniques.
Bibliographie
Livres :
Michel ARNAUD & Xavier EMERY (2000) - Estimation et
interpolation spatiale - Hermes
Peter A. BURROUGH & Rachael A. McDONNELLl (1998) - Principles
of geographical information systems - 2cd edition - Clarendon Press
Noel A.C.CRESSIE (1993) - Statistics for spatial data - Revised
Edition - Wiley Hubert JAYET (1993) - Analyse spatiale quantitative -
Economica
A.G. JOURNEL & Ch.J. HUIJBREGTS (1993) - Mining Geostatistics
- Academic Press George MATHERON (1963) - Traité de
géostatistique appliquée - Technip
Jean-Marc ZANINETTI (2005) - Statistique spatiale - Hermes
Jean-Thierry LAPRESTE (2005) - Introduction à MATLAB -
Ellipses
MapInfo Professional - Guide de l'utilisateur 7.0
MapInfo - Vertical Mapper v.3
Sites Internet :
Sophie BAILLARGEON (2005) - Le krigeage, mémoire
présenté à la l'université de Laval, Québec
-
http://www.theses.ulaval.ca/2005/22636/22636.pdf
Laurent BERTINO et Hans WACKERNAGEL (2004) - Prévoir
l'état de l'océan : L'assimilation de données
intègre observations et modèles numériques -
http://www.larecherche.fr/special/web/wxyz371.pdf
Edith GABRIEL (2004) - Détection des zones de changement
abrupt dans les données spatiales, thèse présenté
à l'université de Montpellier II -
http://www.maths.lancs.ac.uk/~gabriel/papers/TheseGabriel.pdf
Yves GRATTON (2002) - Le krigeage, la méthode optimale
d'interpolation spatiale -
http://www.iag.asso.fr/articles/krigeage_juillet2002.htm
Nicolas JEANNEE (2005) - La Géostatistique : concepts et
applications pour l'estimation de phénomènes spatialisés
-
http://pastel.paristech.org/bib/archive/00001233/01/These_Jeannee.pdf
Caroline LAFLEUR (1998) - MATLAB Kriging Toolbox -
http://globec.whoi.edu/software/kriging/V3/intro_v3.html
Gildas LE CORE (1998) - Outil d'analyse par krigeage -
http://www.faocopemed.org/vldocs/
0000028/publi15.pdf
Denis MARCOTTE - Cours de géostatistique minière
& Cokriging with MATLAB - http://geo.polymtl.ca/
Nargess MEMARSADEGHI (2004) - Cokriging Interpolation -
http://www.cs.umd.edu/~nargess/Publications/cokriging.pdf
Jean SCHWAENEN (1995) - Conversion de données
géodésiques -
http://www.astrolab.be/observations/20040906%20Grazing%20Occultation%20Double
%20Star/ED50-WGS84.pdf
Rapport INERIS, LCSQA (Laboratoire Central de surveillance de la
Qualité de l'Air) - Guide d'utilisation des méthodes de la
géostatistique linéaire (2003)
http://www.lcsqa.org/rapport/rap/prog2003/ineris/Etude14_1_guide_nelle_version.pdf
- Evaluation des incertitudes associées aux
méthodes d'estimation géostatistiques (2003)
http://www.lcsqa.org/rapport/rap/prog2003/ineris/Etude15_rapport_incertitude_avril2004.pdf
| 

