INTRODUCTION GENERALE
L'énergie électrique est un des facteurs les
plus importants dans l'amélioration de la qualité de vie de nos
contemporains et de surcroît du développement économique et
social d'un pays.
En effet, notre pays, la République
Démocratique du Congo étant en phase de reconstruction
présente un taux de desserte national en électricité de
5,7(soit environ 6 ménages sur 100) [1]. On attribue ce faible taux au
manque d'électrification du monde rural, où vit 70% de la
population avec pour conséquence, la destruction de l'environnement en
utilisant le bois de chauffage, et pour pouvoir contribuer a ce
développement d'une manière aussi seine nous nous somme
tournés vers la production d'une énergie électrique viable
par les sources d'énergies renouvelables, dont l'hydrolienne pour les
milieux ruraux défavorisés.
D'où l'intitulé de notre sujet de mémoire
« conception d'un système de régulation automatique de
la fréquence de la tension de sortie d'une hydrolienne » (cas du
projet d'électrification décentralisée de la ferme Benjin
Agriculture).
La Commission Nationale de l'Energie (CNE) envisageait
déjà en 2001 électrifier cinquante villages Congolais
grâce au procédé « Hydrolienne »,
constitué principalement d'un flotteur, d'un rotor et d'un
stabilisateur, le mode de fonctionnement de l'hydrolienne est d'une
simplicité enfantine[2].
Il s'agit d'un hydro-générateur flottant sur une
rivière à un point où la vitesse du courant est au moins
égale à un mettre par second, le courant fait tourner une roue
qui produit de l'électricité dans les zones où il n'y en a
jamais eu.
Lorsque la hauteur de l'eau augmente ou diminuer, le flotteur
oblige l'hydrolienne à se déplacer verticalement ; le rotor
est toujours en rotation.
Notre étude vise essentiellement ;
· A permettre l'électrification rurale
décentralisée des villages et alentour des grandes villes
actuellement dans le noir. Jusqu'ici les populations utilisaient le bois
pour se procurer un peu de lumière. Le projet
d'électrification entre dans le cadre d'un programme de
développement visant à augmenter l'accès des populations
à l'électricité. Ainsi, plusieurs rivières pourront
être utilisées dans la région.
· A participer à la préservation de
l'environnement en réduisant la consommation du feu de bois tout en
améliorant ainsi la qualité de la vie.
· A fournir de l'énergie électrique de
manière permanente et fiable à faible coût tout en
facilitant la gestion de celle-ci puisqu' elle devait se faire localement.
· A promouvoir les entreprises permettant la production
locale des hydroliennes, notamment par l'Atelier Central Panda, ACP en
seigle.
· A réguler la puissance électrique
(fréquence) de distribution autonome que fournirait l'hydrolienne de la
ferme Benjin Agriculture.
Notre travail viens en fait compléter un premier qui
consistait à la conception et au dimensionnement d'une hydrolienne que
produirait l'Atelier Central de Panda de la Gecamines pour le
bénéfice des milieux ruraux décentralisés dont le
ferme Benjin Agriculture, quant à nous, nous nous étendrons sur
l'étude et la conception d'un système de régulation de
fréquence d'une hydrolienne en fonction de la vitesse
d'entraînement de la roue, en effet dans nos hypothèses nous
considérerons l'hydrolienne « hydro générateur
flottant » comme une roue hydraulique pour lequel le poids propre est
pris à sa juste valeur calculée, le courant d'eau de la
rivière Kiswishi ne s'écoulerait que dans un seul sens et qui au
niveau du contact avec les pales de la roue produirait des cavitations qui
certes, seront négligeable dans les calculs du fait qu'inférieurs
à 10m/s[3]. Le régulateur de vitesse que nous concevrons sera
à faible poids par rapport au poids global de l'hydrolienne, et l'eau de
la rivière sera prise comme tel sans tenir compte de ses métaux
lourds, sable, branches mortes.
Le travail que nous présentons outre l'introduction
générale et la conclusion sera subdivisé en cinq chapitres
dont ;
Le premier concerne la présentation de la ferme Benjin
Agriculture et son besoin énergétiques, le second
s'étendra sur l'état de l'art et la situation de l'hydrolienne
dans le contexte des énergies renouvelables, le troisième quant a
lui traitera des généralités de la régulation
automatique et électronique de puissance ainsi que quelques exemples des
régulateurs, le quatrième chapitre fera un état de l'art
sur la problématique de ce travaille en présentant l'hydrolienne
dimensionnées pour la ferme Benjin Agriculture, les paramètres
d'entrés (vitesse d'écoulement) ainsi que les paramètres
de sortie (fréquence du réseau, tension de sortie) et enfin le
cinquième chapitre, étant même le noeuds du travail
traitera de l'étude et la conception du système de
régulation de la fréquence et de la tension sortie en fonction de
la vitesse de la roue d'une hydrolienne .
CHAPITRE I :
PRESENTATION DE LA FERME BENJIN AGRICULTURE ET SA PUISSANCE ELECTRIQUE
NETTE
I.1. PRESENTATION DE LA
FERME BENJIN AGRICULTURE.
La ferme Benjin Agriculture est situées à 58 Km
de la ville de Lubumbashi, au sud-est sur la route Kasenga, non loin du village
Kanama : Elle s'étend sur une superficie de 3800 Ha et a une
altitude de 1200 m tout en se laissant drainé par la rivière
Kiswishi.
Crée sous l'initiative du général
John Numbi en 1998, la ferme Benjin Agriculture a pour objectif.
§ La production végétale (Maïs,
Haricots, soja, arachide, pomme de terre, manioc, la culture
maraîchère).
Pour la culture de maïs particulièrement, elle
vise produire 6000 Tonnes pour l'an 2008 sur 1000Ha de plantation, 3000 plantes
de palmiers
§ La production animale : elle possède 110
têtes de vaches, 100 moutons, 126 chèvres, 70 lapins ainsi que la
volaille (poules, dindons, pintades, canards,...)
§ La création d'un centre d'attraction touristique
avec un mini zoo, elle possède 60 crocodiles, un âne, une
autruche, des singes, perroquets...
§ A long terme, elle vise implanter deux écoles,
un centre de santé (en construction), un guest house (en construction),
etc.
Les facteurs climatiques tels que les précipitations
et les températures sont indispensables pour expliquer certains
caractères du tarissement et de la dynamique des rivières.
L'examen des différentes caractéristiques telles
que la température, les précipitations, l'insolation,
l'humidité de l'air, le vent et l'évaporation justifient
l'appartenance du territoire de Lubumbashi et en particulier de la ferme Benjin
Agriculture au climat du type soudanien caractérisé par
l'alternance d'une saison des pluies et d'une saison sèche.
D'après les données prélevées sur
le site depuis sa création, la pluviométrie varie de 800 à
1200 mm avec constat qu'elle est en train de diminuer (1500 en moyenne pour
l'année 2003, 1100 pour l'année 2004 et 870 pour l'année
2005).
Tableau I.1 Quantité de pluie
2004-2005[3]
|
Novembre
|
Décembre
|
Janvier
|
Février
|
Mars
|
Avril
|
Mai
|
Total
|
|
Quantité de pluies en mm
|
105
|
274
|
433
|
87
|
118
|
13
|
-
|
1045
|
Tableau I.2 Quantité de pluie
2005-2006[3]
|
Novembre
|
Décembre
|
Janvier
|
Février
|
Mars
|
Avril
|
Mai
|
Total
|
|
Quantité de pluies en mm
|
95
|
134
|
203
|
148
|
219
|
62
|
20
|
881
|
Pour la période 2006-2007, la quantité de pluie
relevée (de novembre à mars) est 987 mm.
L'humidité relative varie entre 70 et 80 pendant la
saison de pluie et elle varie entre 10 et 20 durant la saison sèche.
I.1.1 Données Hydrologiques De La Riviere Kiswishi
Comme dit ci haut, la ferme Benjin Agriculture est
drainée par la rivière Kiswishi. Cette dernière
présente plusieurs irrégularités (profondeur, largeur, et
vitesse d'écoulement par endroit) lors de son passage dans
l'étendue de la ferme.
Deux endroits ont attirés notre attention pour la mise
en place des hydroliennes1(*). Ce sont les parties de la rivière
situées en aval d'un mini rapide réalisé suite à un
aménagement du lieu.
Les mesures de vitesse effectuées pendant les
périodes d'étiages correspondant au mois d'Août et
Septembre ont données une vitesse moyenne d'écoulement de l'ordre
de 2,53m/s.
Soulignons que la vitesse est déterminée par le
rapport de la distance parcourue par un flotteur sur le temps
réalisé.
Pour ce qui est de la vitesse moyenne pendant la
période de pluie abondante (mois de Décembre - Janvier) est elle
de 3,217m/s.
Néanmoins, puisse qu'il s'agit de
l'électrification rurale décentralisée, s'il arrivait
qu'un cours d'eau ne fournit pas la vitesse souhaitée pour le bon
fonctionnement de l'hydrolienne, plusieurs aménagement peuvent
être envisagées pour relever la vitesse.
I.2
GENERALITES SUR LES ECOULEMENTS A SURFACE LIBRE
I.2.1 Introduction
Les écoulements à surface libre sont des
écoulements qui s'écoulent sous l'effet de la gravité en
étant en contact partiellement avec un contenant (canal, rivière,
conduite) et avec l'air dont la pression est généralement
à surface libre. Contrairement aux écoulements en charge, la
section d'écoulement devient une caractéristique de
l'écoulement et non plus seulement de la géométrie du
contenant.
I.2.1.1
Classification des écoulements
Un écoulement qui ne varie pas dans le temps est un
écoulement permanent autrement, il est non permanent. À
l'échelle de quelques heures, un écoulement en rivière
peut être considéré comme permanent, par contre
l'écoulement dans un estuaire est continuellement en changement sous
l'effet des marées.
On dit qu'un écoulement est uniforme si l'aire de sa
section d'écoulement est constante tout le long de son parcours,
autrement il est non uniforme. Si la non uniformité est faible, on
qualifiera l'écoulement de graduellement varié. Si le changement
de section s'effectue sur une courte distance, alors l'écoulement sera
brusquement varié. Un écoulement permanent, le long d'une
rivière, est une succession d'écoulements uniformes,
graduellement et brusquement variés.
De plus, en fonction du rapport de la vitesse du fluide sur la
célérité d'une onde de surface (nombre de Froude2(*), Fr),
l'écoulement peut avoir un comportement torrentiel (Fr>1),
critique (Fr=1), ou fluvial (Fr<1).
I.2.1.1.2 L'écoulement permanent uniforme
Cet écoulement, le plus simple mais pas
nécessairement le plus fréquent, apparaît dans un canal,
lorsque la profondeur d'écoulement est constante sur la longueur du
canal et que la pente de la surface libre est égale à la pente du
fond.
· Considérations
théoriques
Considérons un volume d'eau dans un canal
incliné tel que montré à la figure 1 :
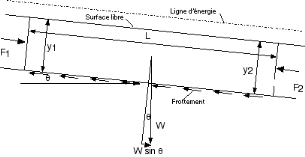
Fig.1. 3 : Équilibre des
forces sur une portion d'écoulement permanent uniforme.
L'équation de conservation de quantité de
mouvement peut s'écrire :
 (I.1) (I.1)
Où, F1 et F2 sont les forces de
pression hydrostatique, est la contrainte de frottement entre l'eau et le
périmètre mouillé P le long de la distance
L, W est le poids du volume d'eau considéré et est la contrainte de frottement entre l'eau et le
périmètre mouillé P le long de la distance
L, W est le poids du volume d'eau considéré et
 est l'angle du canal par rapport à l'horizontale. est l'angle du canal par rapport à l'horizontale.
Si l'écoulement est uniforme y1 et
y2 sont égaux, par conséquent F1 et
F2 et Q1 et Q2 sont aussi égaux.
L'équation 1 se simplifie alors en :
 (I.1.2) (I.1.2)
où A est la section d'écoulement et
R est le rayon hydraulique ( R = A/P). Lorsque l'angle  est petit, est petit,  = =  est égal à la pente du canal S. est égal à la pente du canal S.
La relation précédente s'écrit finalement
:
 (I.1.3) (I.1.3)
La contrainte de frottement est estimée pour un
écoulement turbulent par :
 (I.1.4) (I.1.4)
 est un coefficient de frottement qui dépend de la
rugosité du canal et du nombre de Reynolds de l'écoulement. est un coefficient de frottement qui dépend de la
rugosité du canal et du nombre de Reynolds de l'écoulement.
I.2 PUISSANCE ELECTRIQUE NETTE DE
LA FERME
I.2.1 Introduction
La puissance électrique nette n'est autre que celle
exigée par le consommateur, le dimensionnement ayant été
fait par nos prédécesseur, nous nous contenterons de restituer
les différents calculs afin de s'en assurer pour la suite du travail
étant donné que l'objectif primordial de l'hydrolienne est de
générer de l'énergie électrique, plusieurs facteurs
entrerons en jeux pour l'évaluation à savoir;
- la diversité des charges ;
- les récepteurs ne fonctionnent pas absolument
à pleine charge et simultanément ;
- certains consommateurs réels sont ignorés
à ce stade d'avant-projet, ...
D'où l'importance de certaines hypothèses
simplificatrices.
I.2.2 Hypothèses
1. Les charges d'une même classe, définies
ultérieurement, ont des puissances supposées identiques.
2. Nous considérons au total sept classes
suivantes :
- Classe 1 : Ménages des travailleurs de la
ferme ;
- Classe 2 : Bâtiments administratif ;
- Classe 3 : Hangars;
- Classe 4 : Restaurant ;
- Classe 5 : Salle informatique
- Classe 6 : Eclairages publics ;
- Classe 7 : Stations de pompage ;
3. La démarche globale préliminaire de
maîtrise de l'énergie sera nécessaire (changer les
réfrigérateurs de mauvais rendement, éviter les
halogènes et les lampes à incandescence et leur
préférer les lampes basse consommation, équiper les
appareils à veille de rallonges avec interrupteur intégré,
et surtout, exclure le chauffage électrique...). L'usage de
l'électricité doit être réservé aux
applications nobles de celle-ci : éclairage, informatique,
télévision, hi-fi, moteurs électriques.
I.2.3 Méthodologie de
calcul
L'estimation des besoins en énergie électrique
pour toute la ferme Benjin Agriculture se fera sur base de la formule :
 (I.2.1) (I.2.1)
Avec :
P : Puissance électrique nette.
pui : la puissance d'utilisation par classe.
ks=coefficient de simultanéité,
ks =1
La puissance d'utilisation par consommateur vaut :
 (I.2.2) (I.2.2)
Avec :
pi: puissance installée par type de
consommateur ou classe ;
kui: coefficient d'utilisateur.
Dans le cas échéant ils valent :
ku7 =0.75 (moteurs)
ku1 = ku2 = ku3
=ku5=ku6= 1
ku,prise= 0,15
En résumé, connaissant tous les effectifs des
charges par classe et les différents coefficients de
simultanéité, d'utilisation, nous allons dans cet ordre
déterminer13 :
1. Les puissances installées par type de consommateur
pi [Kw]
2. Les puissances d'utilisations correspondantes par la
formule (I.2.2)
3. La puissance d'utilisation pour toute la ferme par la
formule (I.2.1)
Tableau I.3 Coefficient de simultanéité
pour abonnés
|
Nombre d'abonnes groupés
|
Coefficient de simultanéité
|
Nombre d'abonnés groupe
|
Coefficient de simultanéité
|
|
2 à 4
|
1
|
25 à 29
|
0,46
|
|
5 à 9
|
0,78
|
30 à 34
|
0,44
|
|
10 à 14
|
0,63
|
35 à 39
|
0,42
|
|
15 à 19
|
0,53
|
40 à 49
|
0,41
|
|
20 à 24
|
0,49
|
50 et au-dessus
|
0,4
|
Tableau I.4 Coefficient
d'utilisation
|
Type d'équipement
|
Exemple d'équipements
|
Coefficient d'utilisation
|
|
Équipements industriels
|
Les moteurs
|
0,75
|
|
Équipements ménagers
|
Eclairage
|
1
|
|
Appareils cuisson
|
0,7
|
I.2.4 Evaluation des puissances
installées (pi) et d'utilisation (pui) par classe de consommateurs.
Classe 1 : Ménages.
Des études statistique [4] faites antérieurement
en milieux ruraux du Katanga révèlent que 10% des ménages
consomment 5 Kw/ménage et 90% des ménages 2
Kw/ménage ; Soit en moyenne 
Nombre de ménage : 10
p1 = 2,3 Kw/ménage. pu1 =
p1 x n ku1 = 2,3 x 10 ku1 = 2,3 x 10 0,75 = 17,25 Kw 0,75 = 17,25 Kw
Classe 2 : Bâtiments administratifs.
§ Nombre bureaux : 6
§ Cosö= 0,86
§ ku=1
1 points lumineux de 20 w/bureau
Les puissances installées et d'utilisations valent
p2 = pu2 = (6 x 0,02x1)/0,86 =0,14 Kw
Classe 3 : Hangars.
Servant au stockage des divers produits, les hangars
comporteront essentiellement l'éclairage.
Soit 5 lampes de 20w par hangar.
Nombre d'hangar 4.
p3 =pu3 =(4x5x20w)/0,86 = 0,465Kw
Classe 4 : Restaurant.
Pour un restaurant équipé de :
§ 2 points lumineux de 20 w
§ Un téléviseur + antenne parabolique
100w
§ Appareil chauffant (fours,..)
p4 = pu4 = (2 x 20)/0,86 +2 x 0.15x150w
+2000= 2,915 Kw.
Classe 5 : Salle d'informatique
Les informations reçues par les concepteurs du projet
nous indique que la puissance consommée dans la salle
d'informatique :
§ Un ordinateur
§ une imprimante
§ une antenne V-sat
est de l'ordre de 800w.
p= pu5 =0,8kw
Classe 6 : Eclairage public
Des études antérieures faites par le
ministère de l'énergie, en cette matière, fixent 20 tubes
de 20 w pour point lumineux, soit 0,8 Kw.
D'où p6 = pu6 =
ku6-p6 = (1 x 0,4)/0,86 = 0,465 Kw
Classe 7 : Moulin, groupe frigorifique et station
de pompage
Ø Ku= 1/3
Ø ç= 0,85
Pmec1 = 10 cv =7,350 Kw; pmec2= 1cv =0,
7350 Kw 
Pel= (7,350+7,350+0,735)/0,85= 9,43 Kw
Pu7= 9,43 x1/3 =6,052 KW
La puissance électrique nette demandée sera
égale à la sommation de toutes les puissances utiles (formule
I.2.1) :
P=ks = 1x ( 17,25+0,14+0,465+2,915+0,8+0,465+6,052) = 1x ( 17,25+0,14+0,465+2,915+0,8+0,465+6,052)
P= 28,088 kW
Signalons que pour le moment l'électrification de la
ferme est réalisée grâce à 4 groupes
électrogènes dissémines sur le site dont les
caractéristiques sont : S=30 KVA ; I=43,3 A
P=24Kw; U=230/400V AC
C'est un gaspillage mais ceci se justifie par l'étendu
de la ferme et la situation géographique de différents
bâtiments vu qu'un câblage sérieux n'a pas encore
été effectuée.
CHAPITRE II : ETAT
DE L'ART ET SITUATION DE L'HYDROLIENNE DANS LE CONTEXTE DES ENERGIES
RENOUVELABLES
Dans le cadre du développement durable, face au double
enjeu planétaire posé par l'épuisement prochain des
ressources énergétiques fossiles et les problèmes
posés vis a vis du respect de l'environnement, de fortes incitations
poussent au développement des énergies renouvelables. En effet,
la consommation mondiale d'énergie ne cesse de croître (Figure
1-1données 2000 selon [5]) posant des questions cruciales sur l'effet de
serre et l'amenuisement des ressources énergétiques.
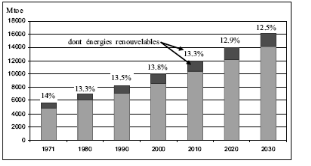
Figure II-1 Consommation d'énergie
primaire dans le monde et prévisions
Aujourd'hui plus de 85% de l'énergie produite est
obtenue à partir des matières fossiles comme le pétrole,
le charbon, le gaz naturel ou de l'énergie nucléaire. La Figure
II-2 montre la répartition en termes d'énergie primaire dans le
monde pour toutes les ressources actuelles. Les formes de production
d'énergie non renouvelables engendrent une forte pollution
environnementale par rejet des gaz à effet de serre qui provoque un
changement climatique irréversible ou dans le cas du nucléaire
une pollution par radiations de longue durée qui pose le
problème, aujourd'hui non résolu, du stockage des déchets
radioactifs [6].
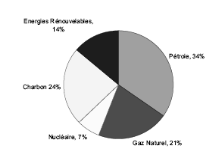
Figure II-2 Répartition des sources
primaires d'énergie dans le monde
L'autre argument qui milite à l'avantage des sources
renouvelables est lié à la pérennité des ressources
en énergies. Dans le courant de 21ème siècle, le paysage
énergétique va radicalement changer car plusieurs ressources
fossiles risquent de disparaître.
De l'état de l'art et situation de
l'hydrolienne dans le contexte des énergies renouvelables.
Il existe plusieurs ressources en énergies
renouvelables : l'énergie hydraulique, l'énergie éolienne,
l'énergie solaire thermique et photovoltaïque, l'énergie
produite par les vagues et la houle ainsi que les courants marins, la
géothermie et la biomasse. Ces ressources en énergie sont
pratiquement inépuisables et propres. Dans le contexte économique
actuel où l'on ne chiffre qu'une partie des coûts en occultant
certains « coûts collatéraux »
(démantèlement de centrales, pollution,...) les installations
à énergie renouvelable peuvent encore aujourd'hui avoir un
coût important (exemple des panneaux solaires photovoltaïques) et
sont donc plutôt réservées à des pays
développés où elles peuvent dans d'autres cas être
assez peu onéreuses (exemple de la combustion de la biomasse) et peuvent
être utilisées dans les pays en voie de développement.
II.1. GENERATION D'ENERGIE
RENOUVELABLE
Une des propriétés qui limite l'utilisation de
l'énergie renouvelable est lié au fait que la matière
première (source de l'énergie) n'est pas transportable dans la
majorité des cas contrairement aux sources traditionnelles comme le
pétrole ou l'uranium qui est extrait des gisements respectifs et
acheminé « sans gros problèmes » vers les distributeurs
ou les usines qui peuvent être éloignées de milliers de
kilomètres. Par contre, le lieu de « l'extraction » de
l'énergie renouvelable est déterminant pour le lieu de
transformation. Seule la biomasse semble avoir les propriétés les
moins restrictives. Par exemple un site éolien doit être
précisément déterminé en choisissant les lieux
géographiques les plus régulièrement ventés, les
panneaux solaires doivent évidemment être placés dans les
zones bien ensoleillés, les propriétés de la houle ne sont
pas favorables partout sur les mers. Dans les zones où le réseau
existe, il est donc pratique et dans la majorité des cas
nécessaire de transformer l'énergie renouvelable sous la forme
électrique qui est transportable via les lignes électriques.
La production énergétique est alors
centralisée et mise en réseau entre plusieurs sites de production
et de consommation. Cependant, le caractère capricieux des sources
renouvelables pose le problème de la disponibilité
énergétique et du stockage de masse, actuellement principalement
assuré par l'hydraulique.
Parmi les énergies renouvelables, trois grandes
familles émergent : l'énergie d'origine mécanique (la
houle, éolien), énergie électrique (panneaux
photovoltaïques) ou l'énergie sous forme de la chaleur
(géothermie, solaire thermique,...) en sachant qu'à la racine de
toutes ces énergies est l'énergie en provenance du Soleil
transformée ensuite par l'environnement terrestre. Etant donné
que l'énergie mécanique est très difficilement
transportable, elle n'est utilisable directement que ponctuellement (pompage
direct de l'eau, moulins,...). Cette énergie est donc majoritairement
transformée en énergie électrique. A l'exception de la
biomasse et de l'hydraulique, l'autre inconvénient majeur des
énergies renouvelables vient de la non régularité des
ressources. A l'opposé, les fluctuations de demande en puissance selon
les périodes annuelles ou journalières ne sont pas
forcément en phase avec les ressources. Par exemple, en hiver il y a un
besoin énergétique plus important pour le chauffage et
l'éclairage mais les journées d'ensoleillement sont plus courtes.
La solution à retenir est certainement la diversification voire le
couplage entre plusieurs sources, par exemple du solaire avec l'énergie
éolienne.
Le stockage de l'énergie électrique à
grande échelle n'est pas pour le moment envisageable même si
l'hydrogène synthétisé par électrolyse de l'eau
semble être un débouché privilégié des
énergies renouvelables. Ainsi, la pile à combustible fonctionnant
à l'hydrogène d'origine renouvelable constituerait une
filière entièrement propre et disponible. De plus, stocker
l'hydrogène en même temps qu'on produit de
l'électricité dans une ferme éolienne ou une centrale
solaire permettra d'absorber les surplus de ces « énergies
capricieuses » et d'améliorer considérablement le lissage de
la production d'électricité, aspect critique des énergies
renouvelables pour les gestionnaires de réseau.
A l'opposer, un couplage des énergies renouvelables
(solaire, éolien) avec la pile à combustible résout en
très grande partie le problème de la disponibilité de
l'énergie
Des travaux au stade R&D sont par exemple en cours sur le
stockage d'hydrogène d'origine éolienne en Espagne (Région
de Navarre) où la société EHN, premier promoteur mondial
en éolien, s'est associée à la société
canadienne `Stuart Energy Systems' [7] spécialisée dans les
technologies de l'hydrogène (électrolyseurs,...).

Figure II-3 Module de
génération de l'hydrogène par l'électrolyse de
l'eau
Cependant, cette filière hydrogène, quoique
très prometteuse, souffre encore aujourd'hui de sa
rentabilité.
La problématique du stockage s'applique
différemment dans les sites isolés et de petites puissances
où il est parfaitement envisageable, voire impératif d'associer
un élément de stockage de type accumulateur
électrochimique ou volant d'inertie.
Toutes les ressources renouvelables sont en forte croissance
(cf. Figure II-1).
La Figure II-4 donne la vue sur la répartition de la
production d'électricité entre les différentes sources
renouvelables ainsi que leurs prévisions pour les années à
venir.
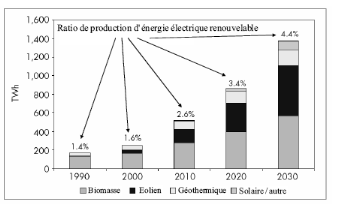
Figure II-4 Production mondiale de
électricité basée sur les énergies renouvelables
[8]
II.1 GENERATION DE LA
CHALEUR
Une grande partie de l'énergie consommée par
l'humanité est sous la forme de chaleur (chauffage,
procédés industriels...). Cette énergie est
majoritairement obtenue par la transformation de l'électricité en
provenance du nucléaire, gaz ou du pétrole. Il existe des moyens
de remplacer ces sources conventionnelles par des sources renouvelables. Une
description et quelques commentaires sont proposés ci-dessous.
II.1.1 Thermo solaire
Une des façons de profiter directement de
l'énergie des photons émis par le soleil est le chauffage direct
des capteurs thermiques. Ils se comportent comme une serre où les rayons
du soleil cèdent leur énergie à des absorbeurs qui
à leur tour réchauffent le fluide circulant dans l'installation
de chauffage. La température du fluide peut atteindre jusqu'à 60
à 80°C. Ce système est totalement écologique,
très peu cher et la durée de vie des capteurs est
élevée.
Une autre propriété qui rend ce type des
capteurs universels est que l'ensoleillement ne doit pas forcément
être direct ce qui signifie que, même dans les zones couverts de
nuages (peu denses évidemment) le fonctionnement reste correct. Le grand
inconvénient est l'impossibilité de transporter l'énergie
ainsi captée à grande distance. Cette source est donc à
utilisation locale (principalement chauffage individuel, piscines). En 2003
environ 14000 m2 de capteurs de ce type ont été en utilisation en
Union Européenne avec une croissance annuelle de 22% [9].
Une autre application de la technique thermo solaire est la
production d'eau douce par distillation qui est très intéressante
du point de vue des pays en voie de développement.
La technologie thermo solaire plus évoluée
utilisant des concentrateurs optiques (jeu de miroirs) permet d'obtenir les
températures très élevées du fluide chauffé.
Une turbine permet alors de transformer cette énergie en
électricité à l'échelle industrielle. Cette
technologie est néanmoins très peu utilisée et demande un
ensoleillement direct et permanent .
II.1.2 Géothermie
Le principe consiste à extraire l'énergie
contenue dans le sol. Partout, la température croît depuis la
surface vers le centre de la Terre. Selon les régions
géographiques, l'augmentation de la température avec la
profondeur est plus ou moins forte, et varie de 3 °C par 100 m en moyenne
jusqu'à 15°C ou même 30°C. Cette chaleur est produite
pour l'essentiel par la radioactivité naturelle des roches constitutives
de la croûte terrestre. Elle provient également, pour une faible
part, des échanges thermiques avec les zones internes de la Terre dont
les températures s'étagent de 1 000 °C à 4 300
°C. Cependant, l'extraction de cette chaleur n'est possible que lorsque
les formations géologiques constituant le sous-sol sont poreuses ou
perméables et contiennent des aquifères [10].
Quatre types de géothermie existent selon la
température de gisement : la haute (>180°C), moyenne
(>100°C), basse (>30°C) et très basse énergie.
Les deux premiers types favorisent la production de l'énergie
électrique. La géothermie basse énergie permet de couvrir
une large gamme d'usages : chauffage urbain, chauffage de serres, utilisation
de chaleur dans les processus industriels... La géothermie très
basse énergie nécessite l'utilisation des pompes à chaleur
et donc une installation particulière [14].
Par rapport à d'autres énergies renouvelables,
la géothermie présente l'avantage de ne pas dépendre des
conditions atmosphériques. C'est donc une énergie fiable et
disponible dans le temps. Cependant, il ne s'agit pas d'une énergie
entièrement inépuisable dans le sens où un puit verra un
jour son réservoir calorifique diminuer. Si les installations
géothermiques sont technologiquement au point et que l'énergie
qu'elles prélèvent est gratuite, leur coût demeure, dans
certains cas, très élevé.
En 1995 la puissance installée dans le monde
était de l'ordre de 7000 MW (il s'agit de production de
l'électricité donc de la géothermie grande et moyenne
énergie). En 2004 ce chiffre est passé à près de
8500 MW. En Europe, les installations utilisant les pompes à chaleur
permettent d'extraire théoriquement environ 1000MW de puissance sous
forme de la chaleur. Ce chiffre augmente chaque année d'environ 50MW
installés [11].
II.1.3 Biomasse
La biomasse désigne toute la matière vivante
d'origine végétale ou animale de la surface terrestre.
Généralement, les dérivés ou déchets sont
également classés dans la biomasse. Différents types sont
à considérer : le bois - énergie, les biocarburants, le
biogaz.
Le bois - énergie est une ressource très
abondante. C'est la ressource la plus utilisée au monde. En Europe par
exemple, c'est 51% de la part de l'énergie renouvelable qui appartient
à ce mode de production d'énergie [12]. Elle se concentre sur
l'utilisation destinée au chauffage. On peut utiliser toutes les
ressources du bois : les chutes ou déchets de production des industries
de transformation du bois (bois d'élagage, le bois forestier provenant
de l'entretien des espaces boisés ou le bois de rebut provenant
d'emballages, de palettes etc.). L'utilisation va de petites chaufferies
individuelles jusqu'à la production de la chaleur industrielle de plus
de 15 MW.
Le développement des biocarburants est souvent
corrélé aux cycles de variation des prix du baril de
pétrole. Aujourd'hui éthanol (betterave, blé...) et
biodiesel (colza, tournesol...) offrent des avantages environnementaux
appréciables dans le contexte de la lutte contre l'effet de serre.
L'Union européenne en parlant de ceux qui sont déjà
avancé,projette d'atteindre une production de 17 millions de tonnes de
biocarburant par an en 2010 par rapport au million produit actuellement.
La principale motivation qui pousse à la production du
biogaz est environnementale. La production de l'énergie, peut être
vue seulement comme une méthode d'élimination des gaz polluants,
mais elle représente une ressource renouvelable très importante.
Quelle que soit l'origine, le biogaz non valorisé contribue, du fait de
ses fortes teneurs en méthane, à l'effet de serre, mais c'est le
bilan global du cycle qui doit être considéré. Il peut
être utilisé comme source brute ou après le processus
d'épuration injecté dans les réseaux de distribution.
Longtemps le biogaz ne servait qu'à la production de la
chaleur. De nos jours la filière carburant ainsi que la
génération de l'électricité est en pleine
expansion. En 1993, 6 millions de m3 ont été utilisés dans
le monde. 80% provenait des décharges d'ordure ménagères
[13].
L'utilisation du biogaz n'est pas encore à son maximum
: une croissance de cette technologie est donc à prévoir.
II.3 GENERATION
D'ELECTRICITE
Une autre famille d'énergies renouvelables est celle
où l'énergie produite est directement sous la forme
électrique. A l'aide des panneaux solaires ou de
génératrices hydrauliques et éoliennes, la puissance
électrique peut être récupérée et
immédiatement utilisée par un récepteur ou bien
transportée vers les réseaux de distribution. Nous donnons ici
une description sommaire de chaque ressource énergétique et la
façon de produire l'énergie électrique.
II.3.1 Photovoltaïque
L'énergie photovoltaïque est obtenue directement
à partir du rayonnement du soleil. Les panneaux photovoltaïques
composés des cellules photovoltaïques à base de silicium ont
la capacité de transformer les photons en électrons.
L'énergie sous forme de courant continu est ainsi directement
utilisable. Les panneaux solaires actuels sont relativement onéreux
à la fabrication malgré la matière première peu
coûteuse et abondante (silice) car une énergie significative est
nécessaire à la production des cellules. Cependant, de nets
progrès ont été faits à ce sujet et on
considère aujourd'hui qu'il suffit de 3 à 5 ans pour qu'un
panneau produise l'énergie que sa construction a
nécessitée. Un autre inconvénient est celui de la
pollution à la production qui est due à la technologie
utilisée. Des progrès technologiques sont en cours pour rendre
l'énergie photovoltaïque plus compétitive. En raison des
caractéristiques électriques fortement non linéaires des
cellules et de leurs associations, le rendement des systèmes
photovoltaïques peut être augmenté par les solutions
utilisant les techniques de recherche du point de puissance maximale
(techniques dites MPPT). Cette dernière caractéristique est assez
commune avec la production d'énergie éolienne.
Les panneaux solaires sont très pratiques
d'utilisation. L'intégration dans le bâtiment est facile et
devient même esthétique. Pour les sites isolés et
dispersés qui demandent peu d'énergie, c'est une solution
idéale (télécommunication, balises maritimes, etc..).
La technique photovoltaïque malgré sa
complexité est aussi en très forte croissance. En 2001, en Europe
on comptait environ 250 MW installés et en 2003 ce chiffre est
monté jusqu'au 560 MW de puissance installée. La Figure 1-5
montre l'évolution mondiale de cette ressource qui est en très
nette progression depuis le début du siècle (la production est
équivalente à la puissance installée).
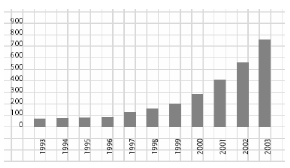
Figure II-5 Evolution de la production
mondiale de cellules photovoltaïques en MW [14]
La RD Congo a par le truchement de la coopération
technique belge eu a développé cette technique,au village Katanga
situé à 80 Km de Lubumbashi. En 1982,il a été
partiellement électrifié par un système
photovoltaïque (6KWc de capteurs,5500 Ah de batteries,un onduleur de 7
KVA).Il alimentait en alimentait en électricité 10
bâtiments (dont le centre de santé et la maison du chef du
village).l'éclairage des rues et un atelier (moulin,tour à
bois,meuleuse,poste à souder ,chargeur de batteries).Cependant des
pannes répétées de l'onduleur impliquait l'intervention
régulière de la coopération belge. Quand, en 1995, la
coopération a cessé, le projet s'est arrêté.
Aujourd'hui, mis à part les supports des capteurs solaires et les boites
électriques,il ne reste plus rien.[15]
II.3.2 Production
éolienne
La ressource éolienne provient du déplacement
des masses d'air qui est dû indirectement à l'ensoleillement de la
Terre. Par le réchauffement de certaines zones de la planète et
le refroidissement d'autres une différence de pression est
créée et les masses d'air sont en perpétuel
déplacement. Après avoir pendant longtemps oublié cette
énergie pourtant exploitée depuis l'antiquité, elle
connaît depuis environ 30 ans un essor sans précédent
notamment dû aux premiers chocs pétroliers. Dans l'échelle
mondiale, l'énergie éolienne depuis une dizaine d'années
maintient une croissance de 30% par an. En Europe, principalement sous
l'impulsion Allemande, Scandinave et Espagnole, on comptait en 2000 environ
15000 MW de puissance installée. Ce chiffre a presque doublé en
2003, soit environ 27000 MW pour 40000MW de puissance éolienne
installée dans le monde. En prévision, pour l'année 2010,
on peut espérer une puissance éolienne installée en Europe
de l'ordre 70000 MW [16].
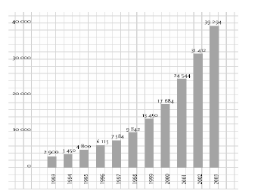
Figure II-6 Puissance éolienne
cumulée dans le monde en MW
II.3.3 Hydraulique
L'eau, comme l'air est en perpétuelle circulation. Sa
masse importante est un excellent vecteur d'énergie. Les barrages sur
les rivières ont une capacité importante pour les pays riches en
cours d'eau qui bénéficient ainsi d'une source d'énergie
propre et « stockable ».
Cette source représentait en 1998 environ 20% de la
production mondiale de l'énergie électrique [17].Certains pays
comme la France sont déjà « saturés » en sites
hydroélectriques exploitables et ne peuvent pratiquement plus progresser
dans ce domaine. Les sites de petite puissance (inférieures à
10kW) sont des solutions très prisées dans les applications aux
petits réseaux isolés. Une forte stabilité de la source
ainsi que les dimensions réduites de ces sites de production sont un
grand avantage.
En Europe, en 1999, on comptait environ 10000 MW de puissance
hydraulique installée. A l'horizon 2100, cette puissance devrait passer
à plus de 13000 MW.
La RD Congo possède un potentiel
hydroélectrique de réputation mondiale mais sous-exploité.
Prenons juste le cas du barrage d'Inga situé sur le fleuve Congo,qui
alimente entre autre la ville de Kinshasa,offrant un potentiel
énergétique de 44000 MW dont seulement 1775 MW sont actuellement
utilisés(deux tranches :INGA I et INGA II)et cette
puissance ne développe en outre que 800MW,ce qui est du ,entre autre ,au
mauvais état des lignes à haute tension dont le système de
protection n'existe quasiment plus,et comme la demande électrique
à Kinshasa est plus grande que ce que peut délivrer la ligne
électrique en provenance d'Inga,les quartiers Kinois sont
alimentés en alternance[18]....
II.3.3.4 Energie de la mer
L'énergie des vagues est encore une fois une forme
particulière de l'énergie solaire. Le soleil chauffe
inégalement les différentes couches atmosphériques ce qui
entraîne des vents eux-mêmes responsables par frottement des
mouvements qui animent la surface de la mer (courants, houle, vagues). Les
vagues créées par le vent à la surface des mers et des
océans transportent de l'énergie. Lorsqu'elles arrivent sur un
obstacle elles cèdent une partie de cette énergie qui peut
être transformée en courant électrique [19]. Il existe
trois grandes familles de systèmes : rampe de déferlement ou
overtropping (Maurice, Maré, Tapchan en Norvège, Wave Dragon en
Danemark...), colonne d'eau oscillante ou OWC (Kvaerner en Norvège, Pico
en Açores en Portugal, Islay en Ecosse, Limpet, Osprey...) et puis les
flotteurs articulés (Cockerel raft, Pelamis en Ecosse...) ou les
flotteurs sur ancrage (Salter duck, AWS en Portugal...). Des projets de
recherche sont aussi en cours [20].
Une autre façon de récupérer
l'énergie de la mer est la production grâce à la
marée qui est due à l'action de la lune sur les eaux. Les
barrages ou des hydroliennes installées dans les endroits fortement
touchés par ce phénomène peuvent être une source de
l'énergie substantielle comme c'est le cas de l'usine de la Rance ou
bien celle de Annapolis au Canada.
L'énergie en provenance du mouvement des eaux de la mer
est une énergie très difficilement récupérable bien
qu'elle représente un potentiel immense. Les investissements sont
très lourds dans un environnement hostile et imprévisible. Cette
énergie est à exploiter dans l'avenir et ne représente
qu'une toute petite quantité de l'énergie
produite à ce jour par rapport aux autres ressources
exploitées.
Néanmoins, il y a une autre façon de
récupérer l'énergie de la mer le long des cotes
grâce aux hydroliennes flottantes pour la production des faibles
énergies comme c'est le cas par exemple du projet hydro-gen en France
appliquant deux versions avec une puissance 10 KW en 2004, 50Kw en 2007 et
visant le MW d'ici 2010;
1. Une version pour les courants de
marée qui s'inversent toutes les 6 heures environ. La machine tourne
donc dans un sens pendant les 6 heures du flot (courant de marée
montante) avec un maximum en milieu de période. Elle s'arrête
pendant la renverse et est actionnée en sens inverse pendant les 6
heures de jusant (courant de marée descendante) avec, là aussi,
un pic à mi-marée.
Les machines sont embossées (ancrées de l'avant
et de l'arrière) en chaînes dans l'axe du courant de façon
à capter un maximum de courant sur une surface minimum.
Hydro-Gen permet un fonctionnement dans les deux
sens.
2. Une version pour les fleuves ou courants
unidirectionnels. A chaque fois que la profondeur et la vitesse de courant le
permettent, par exemple à la sortie des retenues de barrages de
régulation des grands fleuves, les courants peuvent atteindre 10 noeuds
(et de fortes turbulences!)
Les machines sont munies de pales asymétriques car
elles tournent toujours dans le même sens. Le rendement
énergétique va augmenter sensiblement et la production sera
beaucoup plus régulière que sous l'action des courants de
marée.
En R D Congo, une hydrolienne fut installée en janvier
2000 par la société Rutten, du nom du constructeur Belge,Jean
Rutten. Elle alimente tout le village de Kikimi situé aux environ de
Kinshasa le long de la rivière Ndjili (#177;
2OOO habitants),soit 300 points lumineux,2 frigos,une
télévision,un magnétoscope. L'hôpital et
l'administration, situés au bord de la rivière sont
également éclairés. Un réseau câblé de
#177; 7000 m est également relié à l'hydrolienne.
L'installation tourne maintenant depuis 7 ans 24H/24H.Les habitants de Kikimi
sont mieux lotis que les habitants de Kinshasa, qui subissent de
fréquentes coupures d'électricité. Tous les jours les
habitants de ce village sont alimentés en éclairage et sa
croissance n'est plus à démontrer .Cette technologie est une
source d'énergie inépuisable,non polluante et gratuite,en dehors
des avantages indéniables liés à
l'environnement,l'hydrolienne est beaucoup moins chère que le courant
conventionnel[19].
v LES
HYDROLIENNES
Elles constituent un autre type d'équipement permettant
de produire de l'électricité sur un cours d'eau. Une hydrolienne
est une machine sous marines ou de surfaces servant à puiser
l'énergie cinétique de l'eau en mouvement pour la convertir en
énergie électrique.
Pour puiser l'énergie disponible d'un cours d'eau
en mouvement, on emploie une turbine (roue hydraulique), qui,
couplée à un générateur via un multiplicateur de
vitesse, nous donne du courant utilisable. La turbine (roue hydraulique)
est l'élément principal de tout système, car elle
permet de disposer de l'énergie hydraulique et de transformer la
force naturelle de l'eau en énergie mécanique. Cette
dernière sera ensuite transformée en énergie
électrique par un générateur électrique.
La densité plus élevée de l'eau permet
à un générateur simple de fournir des niveaux
significatifs d'énergie. Leur particularité est qu'elles ne
nécessitent aucun génie civil et récupèrent
l'énergie cinétique de l'écoulement selon le principe de
la roue hydraulique.
En utilisant la formule de Bertz, utilisée pour
calculer le rendement d'une éolienne, on remplace la masse volumique de
l'air par celle de l'eau : Energie cinétique de l'eau contenue dans
un cylindre de section S est :
 (II.1.1) (II.1.1)
Avec :  Masse volumique de l'eau (1000 kg/m3 à 15°C) Masse volumique de l'eau (1000 kg/m3 à 15°C)
 Vitesse de l'eau en m/s Vitesse de l'eau en m/s
v TYPES D'HYDROLIENNES
« Il existe deux familles d'hydroliennes :
 Celles qui fonctionnent avec le courant Celles qui fonctionnent avec le courant
 Celles qui fonctionnent avec la
houle »[22] Celles qui fonctionnent avec la
houle »[22]
La terre reçoit de façon inégale
l'énergie solaire : elle n'est pas la même que l'on se trouve
au pôle ou à l'équateur. Au pôle, les rayons
arrivent de manière très inclinée tandis qu'à
l'équateur ils arrivent perpendiculairement. La zone
intertropicale reçoit alors autant d'énergie que tout le
reste de la planète. Ce déséquilibre met alors
en mouvement l'atmosphère et les océans qui vont
rééquilibrer thermiquement l'ensemble. Il génère
aussi des vents qui sont les facteurs principaux des courants de
surface. Ces mouvements sont influencés par la rotation de la
Terre, appelée force de Coriolis. Ce déséquilibre
entraîne également des différences de température
suivant la latitude. Cette différence de température
entraîne une différence de salinité de l'eau et donc de
densité, créant ainsi les courants de profondeur.
« Après 800m de profondeur les vents n'ont plus
d'influence sur les courants marins. Ils ne peuvent donc plus être
les moteurs des circulations océaniques profondes. Ces courants sont
basés sur des différences de température et de
salinité (l'eau froide est plus dense que l'eau chaude et l'eau
salée est plus dense que l'eau douce), entre les différentes
couches de l'océan.
Les courants les plus profonds portent le nom de courant
thermo halin et ceux qui vont un peu moins en profondeur portent le nom de
circulation thermocline. Les eaux chaudes de surface se chargent en sel,
à cause de l'évaporation ce qui tend à les rendre plus
denses.
Lors de la formation de la banquise, en hiver, la glace une
fois formée expulse le sel qui alourdit encore davantage l'eau non
gelée qui devient « tellement » dense qu'elle plonge vers les
profondeurs. Les courants de surfaces et les courants profonds ainsi
formés se trouvent interconnectés, on a alors introduit
l'expression imagée de « tapis roulant » pour
décrire le transport d'eau profonde de l'Atlantique vers le Pacifique
et son retour en surface.
L'océan est un énorme réservoir de
chaleur grâce à la capacité thermique de l'eau. Sa
variation thermique étant beaucoup plus importante que celle de
l'air, il tempère les changements thermiques saisonniers des masses
d'air, qui autrement seraient beaucoup plus importants. Ainsi les courants
chauds des couches de surface peuvent réchauffer le climat d'une
région. À l'inverse, les eaux froides qui remontent en surface
modèrent la température des eaux des régions
équatoriales. Cependant cette circulation reste mal connue car difficile
à mesurer directement. L'océan joue ainsi un rôle essentiel
pour la régulation du climat de notre planète et il assure un
transport de chaleur de l'équateur vers les pôles aussi important
que l'atmosphère »10.
De la théorie précédente, s'est
dégagé deux classifications des hydroliennes à
courant :
§ Celles qui fonctionnent avec le courant de surface
§ Celles qui fonctionnement avec les courant de
profondeur.
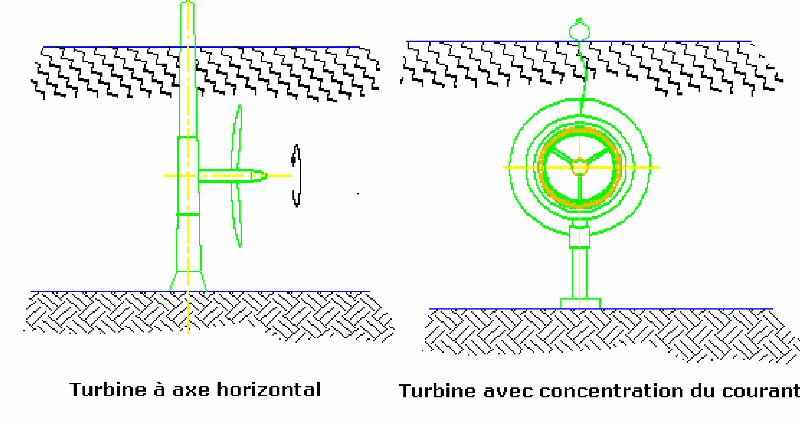
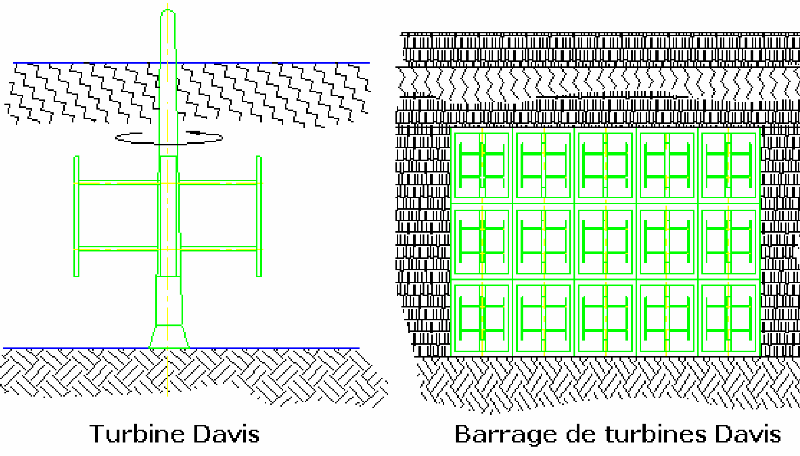
Parmi les hydroliennes sous marines c'est-à-dire
à courant de profondeur nous distinguons : les hydroliennes axe vertical
et les hydroliennes à courant à axe horizontal
Figures II.7. Hydroliennes sous marines
Il existe plusieurs types d'hydroliennes à surface
notamment celles qui fonctionnent avec la houle, celles basées sur
l'utilisation de l'écoulement hydraulique.
Les hydroliennes à houle sont
catégorisées en trois grands types : hydrolienne à
flotteur, hydrolienne à palettes, hydrolienne à air
comprimé.
La houle et les vagues constituent une source d'énergie
dont la récupération occupe l'esprit de l'homme depuis la fin du
XIXème siècle. Dans l'ouvrage de A.Berget de1923 intitulé
"Vagues et marées", on peut déjà trouver quelques
dispositifs proposés pour récupérer l'énergie
mécanique représentée par le mouvement des vagues.
Plusieurs mécanismes peuvent être utilisés et permettrons
de distinguer les différents types d'hydroliennes. Ainsi, nous
rencontrons:
o Hydroliennes houlomotrice à flotteur
o Hydroliennes houlomotrice à palettes
o Hydroliennes houlomotrice à air
comprimée
Fig.II.8.Hydrolienne houlomotrice à
flotteur
Dont les principes de fonctionnement sont décrit
ci-dessous.
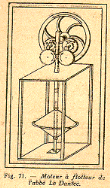
· Hydroliennes houlomotrice à
flotteur
Le flotteur : un support stable
porte un axe de rotation autour duquel peut tourner une poulie. A cette poulie
est accrochée d'un côté un flotteur et de l'autre un contre
poids. Cette idée a été adoptée en 1886 par
l'abbé Le Dantec pour son "moteur à vagues". Le flotteur, en
montant et en descendant alternativement, actionnait, par une tige verticale
à double denture, deux pignons à l'aide de deux "roues libres";
le premier tournait à l'ascension, le second à la descente, et
tous deux transmettaient, par engrenages, leur mouvement à une roue
unique qui se trouvait avoir ainsi un mouvement de rotation continu. De ce
mouvement de rotation continu, on pouvait faire tourner un moteur
électrique afin de produire l'électricité.
· Hydroliennes houlomotrice à
palettes
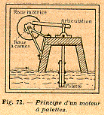
Les palettes : ce n'est plus la
poussée hydrostatique occasionnée par l'ascension de l'eau au
passage d'une vague qui est utilisée ici, mais le choc d'une vague sur
une surface mobile, par exemple sur une palette.
Fig.II.9.Hydrolienne houlomotrice a
palettes
· Hydroliennes houlomotrice à air
comprimée
L'air comprimé : tout comme cela a pu
être imaginé pour la récupération de
l'énergie marémotrice, on peut utiliser un mécanisme de
compression d'air. L'air comprimé peut être alors utilisé
par exemple pour un moteur à vapeur.
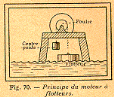
Fig.II.10. Hydrolienne
houlomotrice à air comprimé
CHAPITRE III :
GENERALITES SUR LA REGULATION AUTOMATIQUE ET L'ELECTRONIQUE DE PUISSANCE
Dans ce chapitre il sera question puisqu'il s'agit en fait de
la conception d'un système, de régulation de définir la
régulation automatique ainsi que toutes ses techniques suivis de
quelques exemples dans le contexte des régulateurs de vitesses puis en
fin de ce chapitre nous palerons de l'électronique de puissance en
développant sur les semi-conducteurs étant donné que nous
les utiliserons dans la suite de ce travail.
III.1. LA REGULATION
AUTOMATIQUE[22].
La régulation automatique ou « l'
automatique »
fait partie des sciences de l'
ingénieur.
Cette discipline traite de la modélisation, de l'analyse, de la
commande
et, de la
régulation
des systèmes dynamiques. Elle a pour fondements théoriques les
mathématiques, la
théorie
du
signal
et l'
informatique
théorique. L'automatique permet l'automatisation de tâches par des
machines fonctionnant sans intervention humaine. On parle alors de
système asservi ou régulé. L'état
désiré du système est nommé la consigne.
Les hommes de l'art en automatique ou
automatisme
se nomment automaticiens.
Un exemple simple, est celui du régulateur de
vitesse
d'une
automobile,
il permet de maintenir le
véhicule
à une vitesse constante, vitesse-consigne
prédéterminée par le conducteur.
III.1.2 Définitions
· Régulateur : un dispositif
dont le but est d'agir sur le
monde
réel de manière à lui imposer un certain état.
· Grandeur réglée :
C'est la grandeur mesurée dont on veut réguler la valeur.
· Mesure : La mesure est la
grandeur
physique,
physico-chimique, ou chimique que doit atteindre le système à
réguler. Elle s'exprime en unités physiques ( unités de
pression,
de niveau, de
débit,
de température, en unité de Ph, Rh, en unités de
viscosité,
densité
etc. )
· Consigne : Elle s'exprime dans la
même grandeur physique que la mesure. C'est la valeur
« cible » que doit atteindre la mesure. Lors d'un
changement de consigne, la boucle de régulation fonctionne en mode
« asservissement ». Lorsque la boucle de régulation
élimine les effets des perturbations, elle fonctionne en mode
« régulation ».
· Organe correcteur : l'organe
correcteur est le dispositif permettant de doser la grandeur réglante
dans une boucle de régulation. Il peut être constitué soit
d'une
vanne
automatique soit d'un variateur de vitesse associé à une
pompe
centrifuge ou à
cylindrée
variable soit d'un
gradateur
de
puissance
associé à des résistances chauffantes.
· Grandeur réglante : C'est
la sortie du régulateur, soit la grandeur physique qui agit sur l'organe
correcteur. Par exemple la puissance électrique délivrée
dans des résistances chauffantes.
· Grandeur perturbatrice : Les
grandeurs perturbatrices sont les grandeurs physiques qui peuvent s'opposer
à l'action du régulateur mais que le régulateur ne
contrôle pas. Il peut les mesurer directement ou indirectement pour
apprécier leur action sur le système à réguler. Par
exemple l'ouverture de la porte d'un four, la vitesse du vent pour le
régulateur de direction d'un
avion.
· Transmetteur de mesure : Un
transmetteur de mesure est l'instrument qui traduit l'information d'un capteur
pour la transformer en un signal transportable et utilisable par le
système de régulation. Pour une température, on peut
imaginer un capteur de type
thermocouple
dont la
tension
délivrée en micro-volts est transformée par un
transmetteur en un signal 4-20 mA pour pouvoir être transporté sur
quelques dizaines de mètres.
III.2 REPRESENTATION
GRAPHIQUE D'UN SYSTEME ASSERVI
Les automaticiens ont l'habitude de représenter
graphiquement un système asservi par l'utilisation de
schéma-bloc.
Note : on parle généralement de
procéder pour le système réel et de
système pour désigner sa modélisation
(généralement sous forme d'équations
différentielles ou d'équations aux dérivées
partielles). On parle également de système asservi pour
désigner le système complet, avec le régulateur
(correcteur).
Le schéma-bloc du système peut être
composé :
· soit d'une seule entrée et d'une seule sortie
(SISO : Single Input Single Output)
Exemple : la consigne de
température
d'un
thermostat
de
chauffage
domestique (l'entrée) et la température de la pièce (la
sortie)
· soit de plusieurs entrées et plusieurs sorties
(MIMO : Multiple Inputs Multiple Outputs)
Exemple : la consigne de température et de niveau
d'un
liquide
dans une cuve industrielle (les entrées), la température et le
niveau de ce liquide (les sorties)
Les entrées du système sont appelées
variables exogènes, qui rassemblent les perturbations et les variables
manipulées, commandes ou grandeurs réglantes. Elles sont souvent
représentées de manière générique par la
lettre u ou e. Les sorties du système sont
appelées variables contrôlées, mesures ou grandeurs
réglées. Elles sont souvent représentées de
manière générique par la lettre y.
III.3. LES DIFFERENTS TYPES
DE SYSTEMES
· Systèmes à
temps
continus :
o Systèmes linéaires :
utilise des fonctions de transfert issues de l'utilisation de la
transformée de Laplace ou une représentation d'état
linéaire continue, cette dernière représentation, sous
forme d'équations différentielles ordinaires est plus riche et
permet de conserver des propriétés telles que la
commandabilité ou l'observabilité qui sont perdues par
l'utilisation de la transformée de Laplace.
o Systèmes non-linéaires :
utilise une représentation d'état non-linéaire continue
Il est à noter qu'aucun système n'est
strictement linéaire, ne serait-ce que par les saturations
(butées physiques, par exemple) qu'il comporte ou encore par les
phénomènes d'
hystérésis.
Inversement, un système non-linéaire peut parfois être
considéré comme linéaire dans une certaine
plage
d'utilisation. Il faut toujours garder à l'esprit que le système
sur lequel on peut travailler n'est qu'un
modèle
mathématique de la réalité, et que par
conséquent il y a une perte d'information lors du passage au
modèle. Bien sûr, il incombe à l'ingénieur de juger
la pertinence de son modèle vis à vis des objectifs
fixés.
· Systèmes à temps discrets : ce sont
des systèmes dont le temps à été
discrétisé. Ces systèmes n'existent pas à
l'état naturel (la majorité des systèmes physiques
naturels sont de type à temps continu), mais étant donné
que la plupart des contrôleurs utilisés en automatique sont
calculés par des processeurs numériques, il est parfois
intéressant de modéliser le système commandé comme
un système à temps discret. La modélisation de ces
systèmes utilise des fonctions de transfert avec la transformée
en Z ou une représentation d'état discrète.
· Systèmes à évènements
discrets : systèmes dont le fonctionnement peut être
modélisé par des évènements discrets.
Généralement, ces systèmes sont modélisés
par des réseaux de Pétri, ou par les algèbres de booles.
Des exemples sont les réseaux ferroviaires, ou le fonctionnement d'une
chaîne de montage.
· Systèmes hybrides : Systèmes dont la
modélisation nécessite l'utilisation des techniques liées
aux systèmes continus et aux systèmes à
évènements discrets, par exemple : une boite de vitesse de
voiture.
III.4 SYSTEME BOUCLE
La technique d'automatisation la plus répandue est le
contrôle
en boucle fermée. Un système est dit en boucle fermée
lorsque la sortie du procédé est prise en compte pour calculer
l'entrée. Généralement le contrôleur effectue une
action en fonction de l'erreur entre la mesure et la consigne
désirée. Le schéma classique d'un système
linéaire pourvu d'un régulateur linéaire en boucle
fermée est le suivant:
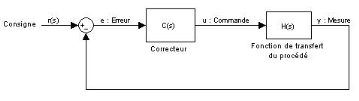
Figure III.1 Représentation d'un
système bouclé
La boucle ouverte du système est composée du
procédé et du correcteur. La fonction de transfert de ce
système en boucle ouverte est donc:

Avec cette
architecture
on peut recalculer une nouvelle fonction de transfert du système :
la fonction de transfert en boucle fermée à l'aide des relations
entre les différentes variables:

On obtient alors :: 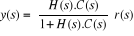
La fonction 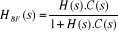 représente la fonction de transfert en boucle fermée. On
peut remarquer que représente la fonction de transfert en boucle fermée. On
peut remarquer que 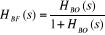 : c'est la formule de Black qui permet de passer d'une fonction de
transfert en boucle ouverte à une fonction de transfert en boucle
fermée. : c'est la formule de Black qui permet de passer d'une fonction de
transfert en boucle ouverte à une fonction de transfert en boucle
fermée.
Remarques :
· La boucle de retour est le chemin qui part de la sortie
et qui revient au comparateur avec le signe "moins". Dans cette boucle, il y a
généralement un bloc représentant, dans la plus grande
majorité des cas, un
capteur.
Si ce bloc a comme fonction de transfert "1" (ce qui équivaut à
une absence de bloc car la multiplication par 1 ne change rien), on dit que le
schéma bloc est à retour unitaire. La formule
précédemment énoncée n'est valable que si le
schéma bloc est à retour unitaire.
· Quel que soit le schéma bloc (unitaire ou non,
avec ou sans perturbation, ...), le dénominateur de la fonction de
transfert en boucle fermée est toujours : 1 +
HBO(s) avec HBO(s)
étant la fonction de transfert en boucle ouverte c'est-à-dire le
produit de tous les blocs de la boucle, y compris ceux de la boucle de retour.
L'étude de cette fonction de transfert en boucle
fermée permet l'
analyse
fréquentielle et temporelle du système général
avec le contrôleur.
III.5. STABILITE
Dans le cas des systèmes linéaires
représentés par une fonction de transfert, l'analyse des
pôles permet de conclure sur la stabilité du système. On
rappelle que les pôles d'une fonction de transfert sont les complexes
p0,p1... qui annulent le dénominateur.
· Dans le cas d'une fonction de transfert continue
utilisant la transformée de Laplace, tous les pôles doivent
être à partie réelle strictement négative pour que
le système soit stable.
· Dans le cas d'une fonction de transfert discrète
utilisant la transformée en Z, tous les pôles doivent avoir un
module inférieur à 1 pour que le système soit
stable.
Signalons qu'en automatique, le terme
stabilité doit être défini précisément car il
existe une dizaine de sortes de stabilités différentes. En
général on fait référence à une
stabilité asymptotique.
Dans le cas des systèmes non-linéraires, la
stabilité est généralement étudiée à
l'aide de la théorie de Lyapunov.
III.6 LES DIFFERENTES
TECHNIQUES [23]
Il existe différentes techniques pour
synthétiser les régulateurs. La technique industrielle la plus
largement utilisée est le régulateur PID qui calcule une action
Proportionnelle,
Intégrale
et
Dérivée
en fonction de l'erreur consigne/mesure. Cette technique permet de satisfaire
la régulation de plus de 90% des procédés industriels.
Néanmoins, de nombreuses techniques de commandes dites
« avancées » peuvent être utilisées
pour la régulation de systèmes plus complexes lorsque le
régulateur PID est insuffisant :
· La commande prédictive se basant sur
l'utilisation d'un modèle
dynamique
du système pour anticiper son comportement futur.
· La commande robuste permettant de garantir la
stabilité par rapport aux perturbations et aux erreurs de modèle.
· La commande adaptive qui effectue une identification en
temps réel pour actualiser le modèle du système.
· La logique floue utilisant un
réseau
de neurones ou un système expert.
· Les contrôleurs non linéaires utilisant la
théorie de Aleksandr Lyapunov, comme les commandes linéarisantes
ou la commande par modes glissants, plus robuste.
· La commande par platitude différentielle, qui
permet l'inversion de modèle sans passer par l'intégration des
équations différentielles, et ainsi de calculer les signaux
nécessaires sur les entrées pour garantir les trajectoires
voulues en sortie.
III.7 EXEMPLE DE BOUCLE DE
REGULATION
Reprenons l'exemple du
moteur
automobile.
On le commande en choisissant l'ouverture du papillon des
gaz
intégré au système d'
injection
du moteur. L'ouverture est directement liée à la
force
appliquée sur le piston donc à l'
accélération
du véhicule. Disons qu'elles sont proportionnelles (on néglige
les pertes et la résistance de l'air sur le véhicule).
On veut maintenir une certaine vitesse, 90 km/h par exemple.
90 km/h est la consigne, il faut la comparer à la vitesse réelle
donnée
par un
tachymètre.
La
différence donne la variation de vitesse à réaliser. On en
déduit l'accélération à demander au
véhicule.
Connaissant le rapport entre l'accélération
et l'ouverture du papillon, on calcule l'ouverture à donner au papillon
pour s'approcher de la vitesse de consigne. Le compteur de vitesse prend alors
la nouvelle valeur de la vitesse pour réitérer
l'opération. De cette manière, lorsqu'on approche de la vitesse
voulue, l'accélération diminue jusqu'à s'annuler sans
brutalité.
On obtient donc ce schéma.
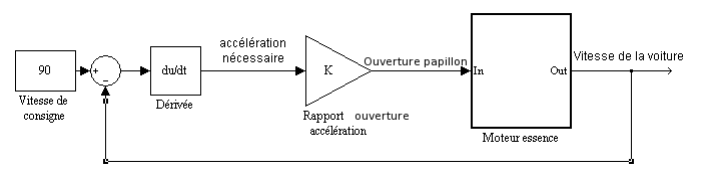
Figure III.2 Schéma d'un
système de régulation.
En réalité, à cause des pertes, il faut
maintenir une certaine accélération entre autres pour lutter
contre la résistance de l'air.
III.2 ELECTRONIQUE DE
PUISSANCE
III.2.1
Généralités
L'électronique de puissance, que l'on devrait
d'ailleurs nommer « électronique de conversion
d'énergie » a moins de 50 ans. Elle a connu un tel essor
qu'aujourd'hui près de 15 % de l'énergie électrique
produite est convertie sous une forme ou une autre. Au cours de ces
années la taille, le poids et le coût des convertisseurs n'ont
fait que diminuer, en grande partie grâce aux progrès faits dans
le domaine des
interrupteurs
électroniques.
Rappelons qu'un convertisseur de puissance de rendement
unitaire (sans pertes) ne peut être constitué que d'interrupteurs
idéaux et de dipôles purement
réactifs
donc sans la moindre
résistance
parasite :
condensateurs
et
inductances. Les
dipôles réactifs sont des éléments de stockage
d'énergie dont la taille (et donc le coût) est inversement
proportionnelle à la fréquence de fonctionnement.
En plus des applications traditionnelles de
l'électronique de puissance comme la
traction
électrique et les entraînements industriels, il est apparu de
nouveaux domaines d'application :
· La gestion du réseau de distribution :
o FACTS : Systèmes
de Transmission Flexible en Courant Alternatif,
o Filtrage actif et amélioration du facteur de
puissance,
o HVDC : Transmission en
courant continu HTA.
· L'
électroménager :
o
variateurs divers,
o
alimentations à découpage,
o plaques de
cuisson à induction.
· Les appareils portables (
caméscopes,
ordinateurs, etc.) :
o
chargeurs d'
accumulateurs
intelligents,
o conversion CC / CC TBT.
· L'
automobile :
très forte augmentation de l'utilisation de l'énergie
électrique dans les automobiles actuelles et en perspective : il y
aura un très gros marché au moment du passage prévu, (mais
retardé ?) en 42 V, les véhicules hybrides, ...
III.2.2 Les interrupteurs [23]
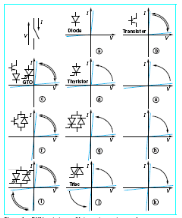
Fig.III.1.Synthèse sur les interrupteurs de
puissance
Historique
C'est dans le domaine du redressement de forte puissance que
se développent les premiers convertisseurs statiques destinés
à remplacer les convertisseurs électromécaniques. Dans les
années 1950, pour la traction électrique, on s'oriente vers la
solution - transport en alternatif + motorisation en continu. Les
convertisseurs statiques nécessaires sont réalisés
à l'aide de redresseurs à vapeur de mercure (ignitrons) ayant la
même fonctionnalité que les thyristors.
· Les premières
diodes de puissance au
silicium apparaissent en
1956 et les
thyristors en 1961. Dans
les années 1970, thyristors et diodes sont utilisés dans des
dispositifs auto commutés comme les hacheurs et les onduleurs, les
années qui suivent voient le développement de transistors
bipolaires de puissance qui favorise le développement d'une
électronique de conversion de faible et moyenne puissance.
· Au début des années 1980, les dispositifs
à transistors poussent les dispositifs à
thyristors vers des
puissances accrues : vers 1990, les
GTO ne sont plus
utilisés qu'en très fortes puissances (> 1 MW) ou pour
des tensions supérieures à 2 kV.
· L'
IGBT
apparaît en 1985, d'abord dans le domaine des moyennes puissances
(quelques dizaines de kilowatts), il supplante les
transistors
Darlington. Il devient dans les 10 ans qui suivent un composant utilisable
en forte puissance.
· L'avènement du thyristor
IGCT (Integrated Gate
Commutated Thyristor) vers 1997 dans le domaine des tensions supérieures
à 6 kV risque d'entraîner à moyen terme la disparition
du thyristor
GTO.
· Dans le domaine des faibles puissances, du fait de sa
rapidité et de la simplicité de sa commande, le transistor
MOSFET
de puissance supplante le transistor bipolaire. Grâce aux techniques
d'intégration planar et l'essor du marché du portable
(téléphone, ordinateur, lecteur CD, etc.) nécessitant une
électronique de conversion efficace et miniaturisée, il supplante
même les diodes dans des applications comme le redressement (redresseur
synchrone).
· Les composants à base de
carbure de
silicium (SiC) apparaissent en 2002. Ceux à base de
diamant sont encore à
l'étude en 2004. Leurs fortes énergies d'ionisation permettent un
blocage de tension plus élevée et/ou des fonctionnements à
haute température.
Les
diodes
Elles sont équivalentes à un clapet dans une
installation hydraulique.
Les deux paramètres importants à prendre en
compte sont :
· La tension maximale de blocage du composant,
c'est-à-dire la tension au-delà de laquelle se produit le
claquage et donc la destruction de la diode.
· L'intensité maximale du courant qui peut la
traverser.
Les trois principaux défauts du composant
sont :
· La tension de seuil VS
· La résistance dynamique RD
· La capacité parasite C.
Actuellement les diodes se déclinent en plusieurs
catégories :
· Les diodes silicium de puissance de résistance
dynamique RD faible.
Elles sont utilisées dans le domaine des convertisseurs
de forte puissance comme les onduleurs de traction. Elles sont
réalisées en boîtier encapsulé. La jonction qui les
constitue est de type PiN (P - Intrinsèque - N), ou PN-N+.
L'introduction d'une zone très faiblement dopée permet d'obtenir
une tension de blocage élevée.
· Les diodes rapides de capacité parasite
C faible.
Elles ont des temps de recouvrement de l'ordre de quelques
dizaines de nanosecondes.
· Les diodes Schottky : tension de seuil
VS faible et C faible.
Elles sont constituées d'une jonction métal -
semi-conducteur. Par rapport aux diodes PiN, la tension de seuil est plus
faible, mais la résistance est plus élevée (d'où
une chute de tension qui dépend plus fortement du courant qui la
traverse). Elles peuvent fonctionner à des fréquences très
élevées mais la tension inverse maximale autorisée est
plus faible. Pour toutes ces raisons, elles sont principalement
utilisées dans les convertisseurs fonctionnant en TBT et à
fréquence élevée : alimentations à
découpage.
· Les diodes Schottky en
carbure de
silicium (SiC).
Elles conjuguent C très faible et une tension
de blocage plus élevée que les diodes Schottky classiques mais
ces améliorations se font au détriment de l'augmentation de
VS.
Les MOSFET de puissance
Ce sont des interrupteurs électroniques dont le blocage
ou l'amorçage sont commandés par une tension (Ils se comportent
comme des portes que l'on peut ouvrir ou fermer à volonté). Ce
sont les plus utilisés dans le domaine des faibles et moyennes
puissances (quelques kilowatts).
Leur domaine d'utilisation est limité à quelques
centaines de volts, excepté le domaine des fréquences
élevées pour lesquelles le
MOSFET
surclasse tous les autres composants.
Leur principal défaut est qu'à l'état
passant ils se comportent comme des résistances
(RDSon) de quelques dizaines de mÙ. Cette
résistance est responsable des pertes en conduction. Le
MOSFET
peut aussi présenter des pertes de commutation lorsqu'il est
utilisé comme interrupteur dans les
alimentations
à découpage. En effet, à chaque commutation, les
capacités parasites présentes à ses bornes doivent
être chargées ou déchargées entraînant des
pertes en CV².
Les Transistors bipolaires de
puissance
Par rapport aux transistors MOS de puissance, ils
nécessitent une commande plus compliquée et ont des performances
dynamiques plus médiocres. Toutefois ils sont thermiquement plus stables
et surtout, du fait d'une commande en courant, ils sont moins sensibles aux
perturbations électromagnétiques.
Les IGBT
Le transistor MOS est rapide et facile à commander,
mais les transistors bipolaires ont une meilleure tenue en tension et
présentent une chute de tension à l'état passant plus
faible pour des courants élevés. La volonté de cumuler ces
deux avantages a donné naissance à des composants hybrides
nommés
IGBT.
Depuis les années 1990, ce sont les composants les plus
utilisés pour réaliser des convertisseurs fonctionnant avec des
tensions de quelques centaines de volts à quelques kilovolts et avec des
courants de quelques dizaines d'ampères à quelques
kiloampères.
Les thyristors
Composant fonctionnant grossièrement comme un clapet
commandé par un « tire-suisse » :
· Pour qu'il devienne passant il faut
l'amorcer : il faut maintenir le courant de gâchette
jusqu'à ce que le courant principal atteigne le courant d'accrochage.
· Au blocage il faut attendre une certaine durée
le désamorçage (turn-off) pour que le thyristor puisse
effectivement bloquer la tension inverse.
Pour ces raisons le
thyristor est
réservé à des applications concernant les très
fortes tensions (> kilovolts) et les forts courants, où son
coût inférieur compense ses limitations techniques. Par exemple
les liaisons longues distances ou sous-marines par courant continu - haute
tension (
HVDC) sont presque toujours
réalisées avec des thyristors.
Exemple de valeurs :
Thyristor 16 kV -
2 kA, fréquence 300 Hz.
Commutation dure et commutation
douce
La montée en fréquence des convertisseurs
statiques entraîne une augmentation des pertes par commutation dans les
interrupteurs. Ces pertes peuvent être réduites, mais surtout
délocalisées par l'adjonction de circuit d'aide à la
commutation (CALC) sans modifier le principe de fonctionnement du
convertisseur.
Une autre possibilité consiste à modifier la
nature des interrupteurs pour qu'ils réalisent une commutation
spontanée, dite aussi commutation douce car les pertes sont nulles, mais
aussi celle des convertisseurs qui doivent alors créer les conditions de
commutations. Ces convertisseurs sont dits convertisseurs (quasi)
résonnants.
Deux types d'interrupteurs peuvent être utilisés,
conduisant à deux types de commutations douces :
· Interrupteur à amorçage commandé
et blocage spontané, comme le thyristor. Le blocage est alors
réalisé au passage à zéro du courant, nommé
ZCS (Zero Current Switching) en anglais.
· Interrupteur à blocage commandé et
amorçage spontané. Le blocage est alors réalisé au
passage à zéro de la tension ou ZVS (Zero Voltage Switching) en
anglais.
Pour parvenir au passage à zéro de l'une des
grandeurs il est nécessaire d'ajouter un circuit oscillant dans le
montage, d'où leur nom de convertisseurs quasi résonnants.
Quelques dispositifs
On distingue généralement quatre grandes
fonctions de convertisseurs dans l'électronique de
puissance :
Conversion continu - continu, alternatif - continu, continu
- alternatif et alternatif - alternatif.
Mais en plus de ces dénominations purement
fonctionnelles, des noms particuliers ont été donnés
à certains convertisseurs.
· Conversion continue - continue
o Hacheurs
o
Convertisseurs à pompe de charge
· Conversion alternative - continue
o Redresseurs
o
Alimentations à découpage
· Conversion continue - alternative
o Onduleurs
· Conversion alternative - alternative
o Gradateurs
o
Alimentations sans interruption (ASI)
o
Cycloconvertisseur
CHAPITRE
IV : PRESENTATION DE L'HYDRAULIENNNE DIMENSIONNEE POUR LA FERME
BENJIN AGRICULTURE AINSI QUE LES PARAMETRES A REGULER
Apres avoir fait un large tour sur les énergies
renouvelables, dont l'hydroélectricité avec l'hydrolienne, la
présentation de la ferme avec sa puissance électrique nette, nous
procéderons dans ce chapitre à la présentation d'une
manière beaucoup plus descriptive de l'hydrolienne que fabriquerait
l'ACP, de préciser les paramètres d'entrées et de sortie
tout en donnant le model mathématique de certains de ses constituants,
afin de concevoir un dispositif de contrôle adéquat.
IV.1 PRESENTATION DE
L'HYDROLIENNE [4]
Cette hydrolienne est en fait un hydro
générateur flottant tel que définit dans l'introduction
générale dont l'élément essentiel est une roue
flottante pour laquelle la rotation entraîne le rotor d'un alternateur
transformant ainsi l'énergie mécanique en énergie
électrique.
6
5
4
3
1
8
7
2
Fig.IV.1 Image 3D de l'hydrolienne
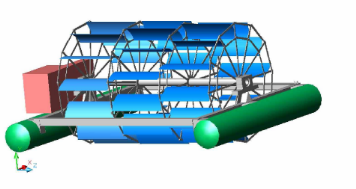
Légende :
1 Roue hydraulique
2 le multiplicateur
3 le régulateur + génératrice
4 Flotteur
5 Châssis
6 Pallier
7 Arbre
8 palettes
IV.2 LA ROUE
HYDRAULIQUE
C'est l'élément capital de l'hydrolienne
flottante car elle transforme l'énergie cinétique de l'eau en
énergie mécanique recueillie sur l'arbre.
-caractéristique de base de la roue
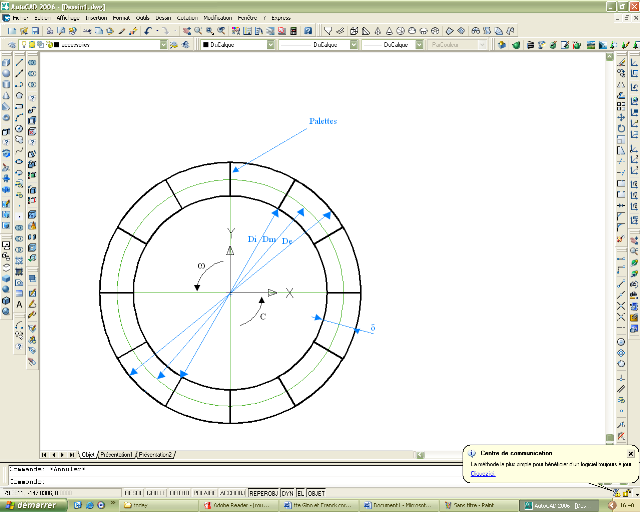 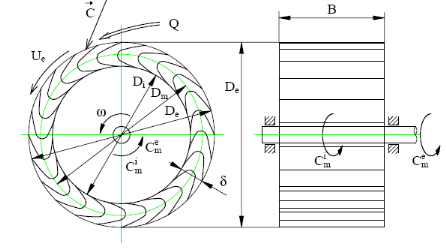
Fig.IV.2 Schématisation de la roue
hydraulique
Les grandeurs géométriques de base
sont :
De, Re : Diamètre et rayon
extérieurs ;
De =800mm
Re =400mm
Di, Ri : Diamètre et rayon
intérieurs ;
Di=600 mm
Ri =300 mm
Dm, Rm : Diamètre et rayon
moyens ;
 (IV.2.1) (IV.2.1)
Np : nombre de palettes ;
Np=24
B: Largeur de la roue
b: épaisseur de la couronne de rayons Re et
Ri (largeur palette) ;
Les grandeurs précédentes, mis à part le
nombre de palettes, sont des longueurs. Elles seront exprimées en
mètre dans les applications numériques.
Sur le plan dynamique, les grandeurs de base de notre roue
hydraulique sont les suivantes :
Qu : Débit utile ou débit
turbinage 
C: Vitesse du courant 
ù: vitesse angulaire de la roue 
u: vitesse périphérique 
C': couple mécanique mN
F: force motrice 
IV.2.1 Détermination des
quelques grandeurs géométriques
IV.2.1.1 Grandeurs géométriques
La puissance à transmettre doit rester plus ou moins
constante.
A cet effet, on aura :
 (IV.2.2) (IV.2.2)
Le rendement électromagnétique 
Le rendement mécanique (pallier) 
Le rendement engrènement 
Le rendement hydraulique 
D'où le rendement global sera :

 (IV.2.3) (IV.2.3)
Nous savons que :
 (IV.2.4) (IV.2.4)

 est l'angle entre est l'angle entre  et et 
Le théorème de la quantité de mouvement
donne lieu à l'équation de Euler :
 (IV.2.5) (IV.2.5)
 Car Car  et et 

 (IV.2.6) (IV.2.6)
 et et  le maître couple : le maître couple :

 (IV.2.7) (IV.2.7)
Avec L : largeur de la roue. Elle sera une grandeur
choisie soit 3.6m
h. : la plongée


La largeur des palettes b est :

Et le diamètre de la roue est :

IV.2.1.2 Détermination du couple de torsion
1. Le couple moteur Cm sera :
 (IV.2.8) (IV.2.8)

Quant au couple résistant, il dépend du moteur
et du rapport de multiplication ou rapport de transmission :
En effet :
La vitesse de rotation N de la roue : 
Le rapport de transmission i : 
Couple résistant moteur Cr : 
Le couple résistant pignon vaut : 53*68=3604Nm.
D'où, il y aura rotation de la roue étant
donné que :
 (IV.2.9) (IV.2.9)
2. Le multiplicateur de vitesse
C'est un appareil destiné à transformer une
vitesse N en une vitesse N' telle que N'>N. sur notre hydrolienne il sert
à adapter la vitesse (lente) de la roue à celle de la
génératrice.
Connaissant ;
· Puissance du moteur P (Kw)
· Vitesse motrice N (tr/min)
· Vitesse réceptrice N' (tr/min)
Fig.IV.3 Représentation
schématique d'un multiplicateur de vitesse
![]()
On défini le rapport global par  ou par ou par

Moteur :

Roue
Avec  où v=2,86m/s où v=2,86m/s
Don k=62,5
Avec respectivement Zs : nombre de dent
à la sortie, w ; vitesse angulaire ; Ns=vitesse de la
génératrice
Ze : nombre de dent à l'entrée
de la roue ; we, vitesse de la roue, Ne ;
vitesse de la roue
La vitesse du moteur électrique est garantie à
plus ou moins 5%24 pour permettre une
légère modification du rapport k.
On aura donc dans ce cas :
Ce qui donne une certaine marge de tolérance sur les
rapports de multiplication étant donné que ce sont des
entiers.
Nombres de dents Z :
E23012(24)
Série recommandée : 12, 16, 20, 25, 32, 40,
50, 63, 80, 100, 125, 160
Série exceptionnelle : 13, 15, 17, 19, 21, 23, 24,
26, 27, 30, 34, 38, 48, 53, 63, 67, 75, 85, 95, 106, 118, 132, 150
Série complémentaires : 14, 18, 22, 28,
3671, 90, 112, 140
Pour un encombrement acceptable, on admet 
IV.3 LA GENERATRICE
ELECTRIQUE
Pour convertir l'énergie mécanique de
rotation, nos prédécesseurs ont eu à faire un choix
entre une machine à courant continu, une machine asynchrone et
une machine synchrone, en fonctionnement générateur . Voici
une petite présentation de chacune.
IV.3.1. La génératrice continue
Le générateur continu a certains avantages
: la tension en sortie est directement utilisable pour charger une
batterie, les moteurs sont souvent couplés à un
réducteur qui se transforme en multiplicateur de très bon
rendement lorsqu'on l'utilise en générateur. Les deux
types suivants sont triphasés, ce qui leur assure un meilleur
rendement.
IV.3.2. La génératrice asynchrone
De plus son rotor en forme de "cage d'écureuils" est
très léger. Tous les moteurs asynchrones triphasés
peuvent être utilisés comme générateur, ce qui n'est
pas le cas de tous les moteurs à courant continu. Le
phénomène de glissement du champ magnétique permet de
moins solliciter la structure mécanique lorsque la vitesse de
pales varie. Mais pour produire de l'électricité il faut
faire tourner le rotor plus vite que la vitesse nominale moteur (exemple: si
vous récupérez un moteur ayant une vitesse nominale de
1500tr/min, alors il vous faudra dépasser cette vitesse pour
produire). Ce type de génératrice est rarement utilisé
sauf pour les petits barrages, les éoliennes et les hydroliennes.
Tableau.IV.1.Avantages et
inconvénients de la génératrice asynchrone
|
Avantages
|
Inconvénients
|
|
- Adapté pour les faibles puissances,soit
inférieures à 200 Kw
- Coût relativement faible.
-
Peut supporter une survitesse de 200% sans danger. Ce qui est dû au fait
que le rotor n'est pas bobiné. Le Rotor n'a pas besoin d'être
branché sur une source de tension extérieure
- Simple : pas
d'enroulements rotoriques (cage d'écureuil), pas de balais, par rapport
à l'alternateur synchrone. Pas d'entretien.
|
-Tension non stable
-Ponctionne de l'énergie pour
son excitation (il est producteur et consommateur à la fois)
|
Figure IV.4 Cage
d'écureuil
IV.3.3 La génératrice synchrone ou
alternateur
Son rotor peut être un électroaimant ou un aimant
permanent. Ce dernier est à éviter, car il est lourd et perd de
son efficacité au fil du temps. La génératrice synchrone
équipée d'un électroaimant, aussi appelée
alternateur, est la plus adaptée à notre projet. En effet, son
rotor est plus léger, permet la régulation de la tension, et son
bobinage est facilement modifiable. De nos jours, toutes les voitures sont
équipées d'un alternateur avec son régulateur de tension.
Cependant il a un balai-collecteur comme le moteur à courant continu.
Tableau.IV.2 Avantages et
inconvénients de la machine synchrone
|
Avantages
|
Inconvénients
|
|
- Adapté pour les fortes puissances.
- Fonctionne
généralement bien dans un réseau autonome.
- Si la
vitesse de rotation du rotor est stable avec un bon régulateur, alors la
fréquence distribuée au réseau sera stable
- S'utilise
principalement dans les réseaux autonomes ou réseaux
isolés.
|
- Nécessite dans certains cas une alimentation continue
sur le rotor.
- Coût élevé.
- Pas prévus pour
des survitesses importantes.
- Les roulements sont à graisser :
entretien.
|
Caractéristique de la
génératrice
Puissance électrique nominale : 15000w
Vitesse d'entraînement N : 1500 tours par minute
Fréquence réseau : 50Hz Facteur de puissance :
90% Cette la génératrice sera une génératrice
asynchrone contrairement au choix effectué par nos
prédécesseurs de cet avant projet qui avaient la
génératrice synchrone
Ainsi, pour l'électrification de la ferme Benjin
Agriculture, nous placerons deux hydroliennes fournissant chacune une puissance
de 15Kw.
IV.4.LES FLOTTEURS
Les flotteurs fonctionnent sous le principe
d'Archimède qui dit ; « Tout corps
plongé dans un liquide subi une poussée verticale de bas vers le
haut, égale au poids de la quantité du liquide
déplacé »
 Poussée verticale Poussée verticale
V=volume d'eau déplacée
Poussé verticale constituant en faits le poids total
de l'hydrolienne.
. 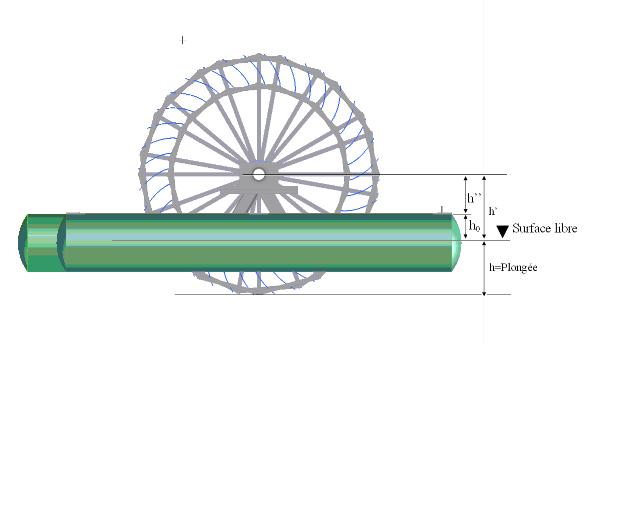
Fig.IV.4 Représentation
schématique de la roue hydraulique reposant sur ses flotteurs
CHAPITRE V : ETUDE ET
CONCEPTION DU SYSTEME DE REGULATION DE FREQUENCE EN FONCTION DE LA VITESSE DE
LA ROUE DE L'HYDROLIENNE
Dans ce chapitre il sera question de concevoir tout en
étudiant chaque élément à prendre, le
système de régulation automatique des grandeurs de sortie
(fréquence, tension) en fonction de la vitesse d'entraînement de
la hydrolienne donc la vitesse du cours d'eau.
En effet, la conception d'un objet se déroule de
diverses façons selon le but poursuivi.
On pourra avoir :
- Une création : l'objet fabriqué
étant conçu en nihilo à partir d'une idée
originale, c'est une conception innovante.
- Une amélioration : la conception vise à
optimiser une caractéristique de l'objet qui n'est pas modifié
dans son principe de fonctionnement. C'est le cas par exemple d'une raquette de
tennis, initialement en bois est réalisé en composite à
base de fibres de carbones, en vu d'une diminution du prix ou d'une
amélioration des performances.
- Une variation : le principe de fonctionnement est
conservé, mais le changement des dimensions ou une modification des
détails impose une conception nouvelle. c'est le cas par exemple, du
passage d'un petit réservoir à une grande citerne.
- Les deux derniers sont traditionnels et c'est dans cette
optique que se situe notre travail.
En effet, étant donné une hydrolienne a pour
rôle de convertir l'énergie cinétique de l'eau en
énergie électrique, ses différents éléments
sont conçus pour maximiser cette conversion et d'une manière
générale, une adéquation entre les caractéristiques
couple/vitesse de la turbine (roue hydraulique) et de la
génératrice est indispensable.
Pour parvenir à cet objectif, idéalement une
hydrolienne doit comporter
- Un système qui permet de le contrôler
mécaniquement (ouverture ou fermeture de la vanne ou diffuseur ou encore
orientation des pales de l'hydrolienne sous-marine, décrochage ou
freinage)
- Un système qui permet de le contrôler
électriquement (machine électrique associée à
l'électronique de commande).
De notre part, nous allons mettre au point un dispositif de
contrôle qui nous permettra à parvenir aux 2 objectifs
cités ci haut avec les connaissances que nous avons acquis tout au long
de notre formation d'Ingénieur civil Electromécanicien et au
moyen dont nous disposons (calculatrices, logiciels...)
Rappelons que l'hydrolienne de notre travail est
appelée à flotter en surface et ne dispose d'aucun
mécanisme de concentration des masses d'eaux et même de
contrôle de ses masses d'eau sur ses palles.
La démarche à suivre est telle que nous
commencerons par le système de régulation mécanique
partant de différents systèmes utilisés sur les turbines
hydrauliques et les aérogénérateurs.
Quant au système qui permet de le contrôler
électriquement, nous ferons une étude complète de la
génératrice asynchrone, puis pour le convertisseur statique de
puissance, nous partirons de ce qui existe sur les
aérogénérateurs (éoliennes )et les hydroliennes
tant sous-marines que de surface pour faire une étude du principe de
fonctionnement, afin de l'adapter au système de contrôle de notre
hydrolienne, mais vu les moyens limités à notre disposition
c'est-à-dire un outil pour la modélisation des systèmes
discrets (Electroniques de Puissance) comme par exemple, une connaissance
parfaite de la modélisation par le Graphe Informationnel Causal (GCI) ou
la Représentation Energétique Macroscopique (REM).
Pour ce qui est de la régulation du coté
électrique nous ferons une études conceptuelle du système,
c'est-à-dire, le conception du circuit de puissance de la chaîne
de conversion avec son circuit de commande sans aller plus loin dans
l'étude des performances du régulateur conçu.
Enfin nous ferons un choix du convertisseur de puissance avec
son circuit de commande étant donné que celui-ci se retrouve sur
le marché.
V.1 LE DISPOSITIF MECANIQUE
DE CONTROLE
Dans les centrales hydroélectriques, le rôle du
régulateur mécanique est :
- De maintenir une vitesse de rotation constante et donc de
maintenir la fréquence du réseau constante. Pour cela le
système de régulation agit sur le débit d'eau admis dans
la turbine pour équilibrer la puissance fournie par la turbine et la
puissance absorbée par le réseau. Ainsi le régulateur doit
commander un organe de la machine capable soit de contrôler le
débit d'eau entrant dans la turbine comme c'est le cas avec le
système de vannage sur les turbines Francis ou les injecteurs sur les
turbines Pelton, soit de contrôler l'énergie transférer par
l'eau à la turbine, comme c'est le cas pour les turbines Kaplan ou les
groupes bulbes grâce à la commande des pales.
- Prévenir les grands écarts de vitesse
En plus de son rôle d'adaptation à des vitesses
de rotation, le régulateur a pour but de limiter à une
valeur admissible, les grands écarts de vitesses qui serait
occasionnés par des brusques variations de charge et dont
l'amplitude peut parfois être très grande, sont rôle est
entre autre la protection du groupe turboalternateur.
Notons que en ce qui concerne notre démarche,
l'hydrolienne est munie des pales fixes et asymétriques, étant
donné qu'elles ne tourneront toujours que dans le même sens
pour une optimisation du rendement et une augmentation de la production. La
modification de la roue hydraulique à palette fixe au profit de celles
mobiles afin de réaliser une régulation de vitesse à
commande par pales comme sur les turbines Kaplan citée ci haut,
imposerait un système complexe de commande et difficile à
réaliser afin de respecter les caractéristiques hydrodynamiques
de celle-ci et ajoutant ainsi un poids trop important vu que la structure est
appelée à flotter, bref les flotteurs serait aussi sous
dimensionné dans ce cas.
Une autre option serait d'ajouter une structure
mécanique sur l'hydrolienne faisant objet de diffuseur à la roue
afin de contrôler le débit d'eau par un système de vannage,
mais pour les mêmes raisons que ceux cités ci haut cette
démarche serait donc à abandonner du fait que ce type
d'hydrolienne serait une surévaluation vu la puissance faible à
produire, néanmoins ce type d'hydrolienne existe pour une production de
puissance supérieur au Mégawatt dans les marées à
courant d'eau d'une vitesse supérieure à 10 m/s.
Enfin au vu de l'analyse effectuée çi-haut
ainsi que nos recherches auprès des constructeurs des Hydrolienne dont
la Firme Belge Rutten Electromécanique et la firme Française SARL
AQUAPHILE nous conclurons que pour une hydrolienne tel que la notre on ne peut
pas réguler la vitesse de la roue, on ``la subit'' donc, contrairement
à l'éolienne fonctionnant sous le même principe.
Donc il ne faut pas chercher à installer un dispositif
de freinage ou de régulation en principe mais tout dépend de la
vitesse et de la variation du courant d'eau.
Conformément au chapitre un, les données
hydrologiques de la rivière Kiswishi sont 2,48 m/s pendant la
période d'étiages et 3m/s pendant la période des crues
donnant une variation de [3-2,48]=0,52m/s. Le régulateur
mécanique sera à abandonner au profit du régulateur
électronique.
V.2 LE DISPOSITIF
ELECTRONIQUE DE CONTROLE DE FREQUENCE: GENERATRICE ASYNCHRONE +CONVERTISSEUR DE
PUISSANCE
Comme il a été montré plus haut le moyen
le plus crédible pour maintenir la fréquence et la tension de
sortie constante est l'utilisation des convertisseurs statiques
commandés, lesquels influerons sur le fonctionnement de la
génératrice asynchrone. La génératrice asynchrone
ayant été choisie nous présenterons une étude
approfondie à ce sujet afin de comprendre le principe de la
régulation plus loin ensuite nous expliquerons chaque partie du
convertisseur statique.
a)Principe
général.
L'hydrolienne fonctionnant avec une vitesse variable, le
générateur (synchrone ou asynchrone) produit un courant
alternatif de fréquence variable. L'emploi de deux convertisseurs de
puissance permet de fixer la fréquence de sortie à la
fréquence du réseau c'est-à-dire 50 Hz issue des
fréquences variables des courants de la machine par la création
d'un bus continu intermédiaire. Avec une telle structure, les
fluctuations rapides de la puissance générée peuvent
être filtrées par le condensateur en autorisant une variation de
la tension du bus continu sur une plage donnée.
Ces convertisseurs seront dimensionnés pour 100% de
la puissance nominale de la génératrice, ceci augmente
significative le coût de l'installation et les pertes. Selon la topologie
des convertisseurs utilisés, deux structures de conversion peuvent
être utilisées et sont maintenant détaillées.
Roue Hydaulique
Courant alternatif à fréquence fixe
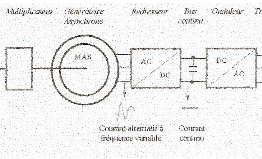
Fig.V.1Hydrolienne à vitesse
variable connectée au réseau isolé de distribution via des
convertisseurs statique.
b) Alimentation utilisant un
redresseur à diode et un onduleur contrôlés par MLI
Cette topologie utilise un onduleur fixe (50Hz) à
IGBT3(*) contrôle par
MLI placé entre le bus continu et le réseau de distribution,
et un redresseur à diodes entre le bus continu et la
génératrice. La puissance transitée entre la
génératrice et le bus continu est donc unidirectionnelle et la
génératrice ne peut donc être que freinée en cas
d'utilisation d'une commande vectorielle de la génératrice
(suivie d'un dispositif d'orientation des pales comme sur les
éoliennes). Ce type de montage n'est pas recommandé parce qu'en
cas de variation d'amplitude de tension alternative à l'entrée,
le condensateur du bus continu recevra également une tension d'amplitude
moyenne relativement basse ce qui perturberait le circuit de commande de
l'onduleur MLI et donc il y aura un défaut de régulation
(Fig.V.2)
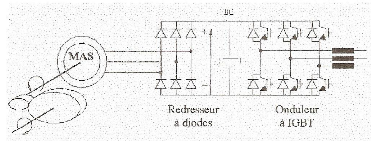
(Fig.V.2 Alimentation avec redresseur
à diodes
c) alimentation utilisant un
redresseur et un onduleur contrôlé par MLI
Pour cette structure, le redresseur à diode est
remplacé par un convertisseur à IGBT contrôlé par
MLI fonctionnant à fréquence variable. La vitesse de la
génératrice est alors parfaitement contrôlable, une
meilleure capture de la puissance est obtenue par rapport à la structure
précédente (fig.V.2). Un deuxième convertisseur, à
MLI connecté au réseau est nécessaire pour
générer des grandeurs à 50 Hz sur le réseau
électrique isolé de distribution.
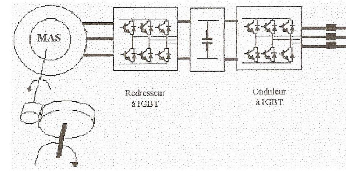
Fig.V.3 Alimentation avec deux redresseurs
MLI
V .1.1
GÉNÉRATRICE ASYNCHRONE
Il s'agit en fait d'une une machine à induction
asynchrone triphasée qui transforme de l'énergie mécanique
en énergie électrique. Pour réaliser cette transformation
elle doit pour cela être entraînée au-delà de la
vitesse de synchronisme (variable suivant la charge). Son rotor est
généralement à cage d'écureuil ; elle
bénéficie donc de la robuste simplicité du moteur à
cage et des mêmes moyens de fabrication. La puissance nécessaire
à sa magnétisation est fournie par le réseau lorsqu'elle
est couplée en parallèle ou par une batterie de condensateurs
dans le cas d'une utilisation isolée comme c'est le cas pour notre
travail.
Ø Principe de fonctionnement d'une
génératrice asynchrone [25]
Une
génératrice synchrone (alternateur) est entraînée en
fonctionnement normal à sa vitesse de synchronisme (par exemple 1500
tr.min-1 pour 4 pôles). La génératrice
asynchrone elle, doit être entraînée au-delà de sa
vitesse de synchronisme pour fournir de l'énergie électrique.
Cependant, ces machines asynchrones ne possèdent pas comme les
alternateurs un circuit d'excitation. II faut néanmoins fournir la
puissance de magnétisation aussi bien en génératrice qu'en
moteur; il ne s'agit pas d'une puissance utilisable, appelée puissance
active, mais d'une puissance fictive, puissance réactive, correspondant
à une composante du courant à facteur de puissance nul. Ce
courant peut être emprunté au réseau mais peut aussi bien
être obtenu de façon statique en branchant en parallèle
à la machine une batterie de condensateurs. En outre, en ajustant ces
condensateurs de façon précise, il est possible, dans certaines
conditions, d'utiliser une génératrice asynchrone en dehors d'un
réseau, fonctionnement autonome pour alimenter une charge isolée
qui dans notre cas est le réseau de distribution de la Ferme Bejin. Le
stator aura 3 enroulements couplés en étoile ou en triangle qui
seront alimentés par le système triphasé de tensions. Il
en résultera alors une création d'un champ magnétisant
glissant dans l'entrefer de la machine (Théorème de FERRARIS). La
vitesse de glissement de ce champ par rapport au stator est : (V.1) (V.1)
 où ùS désigne la pulsation du
réseau du réseau d'alimentation triphasé statorique et
p est le nombre de bobines de chaque bobinage et également le
nombre de paires de pôles du champ magnétique apparaissant au
stator. Le rotor de la machine supporte un bobinage triphasé avec un
même nombre de pôles que celui du stator. Le rotor de la machine
supporte un bobinage triphasé avec un même nombre de pôles
que celui du stator couplé en étoile. Ce type de rotor est dit
bobiné on peut envisager un rotor plus sommaire constitué de
barres conductrices court-circuitées par un anneau conducteur à
chaque extrémité. Ce second type de machines est appelé
machine asynchrone à cage. Le rotor tourne par rapport au stator
à la vitesse où ùS désigne la pulsation du
réseau du réseau d'alimentation triphasé statorique et
p est le nombre de bobines de chaque bobinage et également le
nombre de paires de pôles du champ magnétique apparaissant au
stator. Le rotor de la machine supporte un bobinage triphasé avec un
même nombre de pôles que celui du stator. Le rotor de la machine
supporte un bobinage triphasé avec un même nombre de pôles
que celui du stator couplé en étoile. Ce type de rotor est dit
bobiné on peut envisager un rotor plus sommaire constitué de
barres conductrices court-circuitées par un anneau conducteur à
chaque extrémité. Ce second type de machines est appelé
machine asynchrone à cage. Le rotor tourne par rapport au stator
à la vitesse   (V.2) , (V.2) ,
 étant l'angle entre le repère statorique et le
repère rotorique. étant l'angle entre le repère statorique et le
repère rotorique.

Fig.V.4.Position des axes des phases
statoriques et rotoriques
La fig.V.4 rappelle la position des axes des phases
statoriques et rotoriques dans l'espace électrique (angle
électrique est égal à l'angle réel multiplié
par le nombre p de paire de pôles par phase.
Le sens des enroulements de phase est conventionnellement
repéré par un point(.) ;un courant positif i
entrant par ce point crée un flux  compté positivement selon l'orientation de l'axe de
l'enroulement. compté positivement selon l'orientation de l'axe de
l'enroulement.
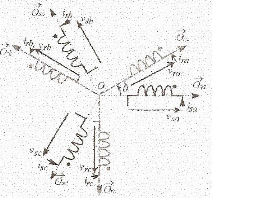
Fig.V.5 Représentation de la machine
asynchrone dans l'espace électrique[28]
Ø Rappel
sur la loi de Faraday
La loi de Faraday exprime la relation entre la tension v aux
bornes d'une bobine de résistance  d'inductance d'inductance , le courant i, la variation du flux totalisé , le courant i, la variation du flux totalisé  : :
  (V .3)
(V .3)
Avec  où où  est un flux de couplage magnétique avec d'autres enroulements,
et est un flux de couplage magnétique avec d'autres enroulements,
et  est le flux propre de l'enroulement. est le flux propre de l'enroulement.
Rappelons que pour l'hydrolienne la
génératrice choisie comporte les caractéristiques
suivantes :
Puissance électrique nominale : 15000w
Vitesse d'entraînement : 1550 tours/ minute
Vitesse de synchronisme : 1500 tours/minute
Le glissement :
Fréquence réseau : 50Hz
Facteur de puissance : 90%
Tension produite : 220 V/380 V 220 V/380 V
Et donc au niveau du multiplicateur nous devrons revoir les
calculs effectués dans la première partie de cet avant projet en
surmultipliant la vitesse de l'écoulement de l'eau afin d'avoir au rotor
une vitesse supérieure à 1500 tr/min pour pouvoir respecter le
principe de fonctionnement des génératrices asynchrones.
Soit que  était la raison du multiplicateur précédemment
dimensionné, nous nous fixons N ou vitesse au niveau du rotor =1550
tours/minutes, donc on aura : était la raison du multiplicateur précédemment
dimensionné, nous nous fixons N ou vitesse au niveau du rotor =1550
tours/minutes, donc on aura :
Nous prendrons pratiquement un multiplicateur dont k=65
mais pour raison de conformité aux normes k=70 Cfr. Chap.IV
V.2 LE REDRESSEUR
Un redresseur, également appelé convertisseur
alternatif - continu (rectifier en anglais), est un convertisseur
destiné à alimenter une charge de type
continu, qu'elle
soit inductive ou capacitive à partir d'une source
alternative. La
source est, la plupart du temps, du type tension.
Les redresseurs sont essentiellement réalisés
à partir de
diodes et de
thyristors. Ces derniers
ne sont utilisés que s'il est nécessaire de faire varier les
grandeurs électriques en sortie du redresseur. Les
transistors
MOSFET et
IGBT
peuvent être utilisés dans certains cas spécifiques.
Les redresseurs non commandés sont utilisés pour
convertir une grandeur alternative en une grandeur continue. Ils sont par
exemple utilisés pour entraîner des
moteurs
à courant continu. Ils constituent l'étage d'entrée de
la quasi totalité des
alimentations
à découpage qui alimentent l'équipement audio-visuel
des ménages.
Les redresseurs commandés à thyristor sont en
voie d'obsolescence et sont avantageusement remplacés par la mise en
cascade d'un redresseur non commandé et d'un
hacheur. D'une part, la
commande d'un
transistor
à effet de champ ou d'un
IGBT
est beaucoup plus simple que celle d'un thyristor et d'autre part, les
fréquences de fonctionnement des hacheurs qui dépassent
aujourd'hui les 200 kHz permettent d'adapter le rapport cyclique du hacheur
pour obtenir une régulation de la tension de sortie. Cette
propriété permet d'obtenir une tension de sortie constante sans
être contraint d'ajouter un condensateur de forte capacité.
Pour qui fait l'objet de notre travail ce redresseur devra
convertir la tension alternative issue du générateur en une
tension continue de même ordre de grandeur pratiquement
c'est-à-dire 220 Volts
V.2.1 Pont de Graetz classique
V.2.1.1 Pont de Graetz idéal
Fig.V.2.1.a.Schéma d'un redresseur
triphasé à Thyristors
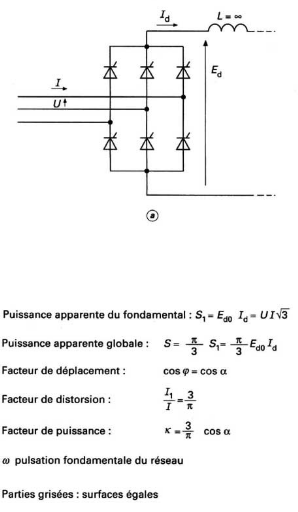
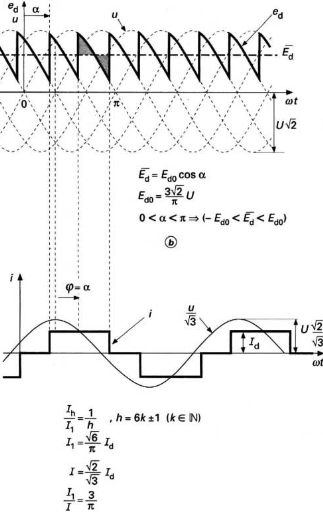
La Fig.V.2.1.b.Principe de fonctionnement
d'un pont de Graetz à six pulsations (p = 6)
La figure V.2.1 rappelle la structure et le fonctionnement
d'un pont de Graetz à six pulsations (p = 6), supposé
idéal, que l'on obtiendrait sous deux conditions :
-- d'une part, des inductances nulles du côté
alternatif, permettant des commutations de courant instantanées
d'un thyristor à l'autre, et donc des empiétements nuls ;
d'autre part, une inductance L infinie du côté
continu, conduisant à une ondulation nulle et un lissage parfait.
Le courant alternatif i a, ainsi, une forme parfaitement
rectangulaire (figure 1c), dite 2/3 - 1/3 : pendant 2/3 du temps, le courant
est non nul et, pendant 1/3 du temps, il est nul.
Si l'on néglige, en outre, les chutes résistives
de tension, le fonctionnement du convertisseur est assimilable, du
côté continu (figure 1b), à celui d'une source de tension
continûment réglable, au moyen de á, angle de retard
à l'amorçage ou angle d'allumage (avec 0 < á <
ð) :
Considérons une génératrice asynchrone de
tension de sortie 220 V-?/380 V-Y
de puissance 15KW ou 20 Ch .En ce qui nous concerne ,nous
allons considérer un raccordement ? :
Ed = Ed0 cos á
(V.2.1)
 (V.2.2) (V.2.2)
Pour ?=18 ° ;
Avec : Ed tension continue moyenne, ou
tension redressée (d pour direct current ),
Ed 0 tensions redressées pour
á = 0,
U valeur efficace de la tension alternative entre
phases.
La tension réelle fournie par le convertisseur se
décompose en une composante continue, une composante alternative de
fréquence 6 f et des harmoniques de 6 f, f = ù/2ð
étant la fréquence fondamentale. Considéré du
côté continu, le pont de Graetz est une source de tension en amont
de l'inductance de lissage, et une source de courant en aval. Vu du
côté alternatif, il se comporte comme une source de courant
rectangulaire. En revanche, l'action sur l'angle á joue non pas sur
l'amplitude de ce courant mais sur son déphasage, en retard par rapport
à la tension alternative. Le facteur de déplacement, cos ?,
c'est-à-dire le facteur de puissance associé au fondamental, est
alors exactement égal à cos á : cos ? = cos á
(V.2.3)
Les valeurs efficaces Ih des harmoniques du courant
rectangulaire décroissent linéairement en fonction de leur rang h
et sont indépendantes de á :
  (V.2.4)
(V.2.4)
avec h rang de l'harmonique : h = 6 k#177; 1,k€ N,
I1 valeur efficace du courant alternatif de
l'harmonique 1 (ou fondamental).
Le courant I1 est lié au courant continu
débité Id par :
 (V.2.5) (V.2.5)
 A A
La valeur efficace du courant global de ligne s'écrit
:
On en déduit le facteur de distorsion du courant :
 (V.2.6)
(V.2.6)
 (V.2.7)
(V.2.7)
et le facteur de puissance :

 (V.2.8)
(V.2.8)
V.3 LE CONDENSATEUR DE
FILTRAGE
Définition : un condensateur est un composant
constitué par 2 conducteurs parallèles, appelés armatures
séparés sur toute l'étendue de leur surface par un milieu
isolant de faible épaisseur , exprimé par sa rigidité
diélectrique år (epsilon) ou permittivité
relative.
Pour les applicatios en Electronique de puissance,3grandes
familles sont utilisés :les condensateurs électrolytiques
à l'Aluminium
Les condensateurs au céramique,
Le condensateur films
Pour le filtrage de la tension continue ,on utilise les
condensateur électrolytiques. Avec les progrès
réalisés pour augmenter la durée de vie permettent leur
emploi dans les appareillages de moyenne puissance .P>10 KW ; U<1000
V
C
symbole
A
B
![]()
Dimensionnement
Pour le calcul de dimensionnement, le mieux est de consulter
les constructeurs avec un cahier de charge précis donnant les formes
d'ondes de tensions et courants, ainsi que la durée de vie
espérée.
Néanmoins, les catalogues des constructeurs donnent des
indications qui nous ont de dégrossir le problème, c'est ainsi
que nous avons opté d'un condensateur électrolytique de 4OOV/1000
uF
V.4 L'ONDULEUR
V.4.1.
Généralités
Un onduleur est un convertisseur statique qui transforme la
puissance électrique fournie par une source de fréquence nulle,
en puissance électrique fournie par une source de fréquence
nulle, en puissance électrique alternative. Vu des bornes de sortie, il
se comporte comme un générateur mono ou polyphasé dont la
fréquence et l'amplitude sont le plus souvent réglables .Sa
représentation schématique est donné à la figure
suivante ci-dessous :

Fig.V.6.Schémas bloc d'un onduleur
La conversion est effectuée avec un rendement
énergétique proche de l'unité, par fermeture et ouverture
contrôlée d'interrupteurs statiques (thyristors) placés
entre borne d'entrée et de sortie. Aux faibles pertes près dues
aux conductions des thyristors et à leurs transitoires de coupure, les
grandeurs d'entrée et de sortie sont liées par la loi de
conservation de la puissance active P[23].
L'ingéniosité s'est avérée
spécialement florissante dans la conception de ce type de convertisseurs
et un grand nombre de montages différents a de ce fait
été développé. Avant de nous limiter dans le cadre
de notre travail, aux schémas les plus couramment utilisés en
électrotechnique, mentionnons les familles caractéristiques
principales suivant lesquelles peuvent se distinguer les onduleurs :
-Les onduleurs de tension et de courant : Selon que la
source continue se comporte comme un générateur de tension ou un
injecteur de courant, la sortie sera vue par l'utilisateur comme des sources de
tension ou des injecteurs de courants alternatifs. Le choix dépend de
l'utilisation, une alimentation de secours ou un réseau de bord
nécessite des onduleurs de tension ; les onduleurs de courant
permettent quant à eux, un meilleur contrôle des systèmes
d'entraînement à moteurs alternatifs et limite le courant de
court-circuit en cas de défaut.
-Les onduleurs autonomes et non autonomes : Lorsque
l'onduleur est destiné à fournir de l'énergie alternative
à un récepteur doté de forces électromotrices,
celles-ci peuvent utilisées pour provoquer naturellement la commutation
des thyristors. Par contre, le récepteur impose les tensions de sortie,
et comme les thyristors doivent être amorcés sur base de ces
dernières, l'onduleur est dit non autonome. Des exemples courants
d'applications sont l'alimentation sous vitesse variable de moteurs synchrones,
ou la récupération d'énergie continue avec
réinjection sur le réseau industriel. D'autre part lorsque la
charge est passive, l'onduleur doit disposer d'autres moyens aptes à
provoquer l'extinction de ses thyristors : la fréquence et la forme
du signal de sortie peuvent alors être choisit librement et l'on parle
d'onduleurs autonomes. Par ailleurs on distingue les onduleurs autonomes
à commutation libre ou onduleurs pilotés par la charge ou le
récepteur est un circuit oscillant et les onduleurs autonomes à
commutation forcée qui sont particulièrement destinés
à l'alimentation des moteurs asynchrones triphasées en vitesse
variable. Les deux grands domaines d'application classiques des onduleurs de
tension sont les alimentations de secours et les entraînements à
vitesse variable. Ils sont caractéristiques de deux grandes familles,
celles de fréquence fixe et celle des systèmes à
fréquence variable .La première configuration typique à
fréquence fixe est celui de l'onduleur d'alimentation sans coupure (ASI)
qui permet de palier les défaillances d'un réseau alternatif en
recréant la tension correspondante à partir d'une batterie. Dans
la suite nous ferons apparaître dans la cellule le symbole familier de
l'IGBT afin de présenter aux lecteurs un symbole familier qui correspond
de surcroît au composant le plus largement utilisé, il faut
néanmoins insister sur le fait que n'importe quel composant commandable
à l'amorçage et au blocage peut tenir ce rôle. La forte
évolution de cette fonction s'est appuyée, d'une part, sur le
développement de composants à semi conducteur entièrement
commandable, puissants, robuste et rapides, d'autres part, sur l'utilisation
des techniques dites de modulation de largeur d'impulsion (MLI ou Pulse With
Modulation PWM) ; ces dernières s'appuyant sur les performances en
fréquence de découpage permises. La structure utilisée est
majoritairement triphasée, les tensions découpées sont
appliquées à la machine, dont les inévitables inductances
de commutation agissent comme des filtres de courant[23].
V.4.2 Principe de la
conversion
Si l'on revient au principe d'une conversion continu
-alternatif basée sur l'électronique de commutation, qu'il
s'agissent de générer une onde de tension alternative en
connectant cycliquement la sortie à un certain nombre de sources de
tension continue par l'intermédiaire d'interrupteurs. La cellule de
commutation reste toujours l'élément de base indispensable
à la mise en oeuvre d'une telle fonction mais est une structure minimale
ne permettant pas l'obtention que de deux valeurs de tension (0 et E). D'une
façon plus générale on peut estimer qu'il existe deux
moyens d'actions pour réaliser cette fonction de conversion :
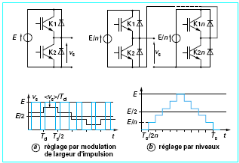
Fig.V.6 Procédé de
réglage des onduleurs [30]
-Le premier (figure V.6) s'appuie sur l'utilisation directe de
la cellule de base et consiste à régler la fréquence et la
durée des interconnexions de la source avec la sortie. Il est donc
temporel et débouche sur les techniques de modulation de largeur
d'impulsion.
-Le second revient à contrôler l'amplitude soit
de façon continue en créant une source réglable (ce qui
suppose l'existence d'un autre étage de conversion), soit de
façon discrète en disposant d'un nombre suffisant de sources.
V.4.3 Fonction de modulation de
la cellule
Dans le cas des commandes adjacentes (et en négligeant
les temps morts), il est intéressant de définir la notion de
fonction de modulation fm de la cellule. Il s'agit d'une
fonction temporelle analogique. La tension de sortie est sous forme de piliers
contins et vaut :
 (V.4.1)
(V.4.1)
A un facteur constant près, elles sont
entièrement données par les fonctions fm, qui
peuvent être choisit périodiques de moyenne nulle. Chaque signal
de sortie présentera une composante fondamentale de fréquence et
phase réglable par fm et des harmoniques.
Appliquées à la charge, ces tensions y développent des
courants alternatifs, qui se retrouvent additionnés ou soustraits dans
les lignes d'entrée, selon la position des interrupteurs qui en
effectuent ainsi le redressement :  (V.4.2) (V.4.2)
Si la charge est du type inductive, elle offre une
impédance du type croissante avec la fréquence et se comporte
comme un filtre atténuateur pour les harmoniques, les courants seront
beaucoup plus proches de la sinusoïde pure que les tensions [31].
V.4.4 Caractéristiques
de la tension de sortie [32]
Pour une fonction f rectangulaire de pulsation , la décomposition en série de Fourier de la tension Vs
(t) permet d'écrire pour une un onduleur monophasé : , la décomposition en série de Fourier de la tension Vs
(t) permet d'écrire pour une un onduleur monophasé :
 (V.4.3) (V.4.3)
Le signal ne comporte que des harmoniques impaires ; la
valeur efficace du fondamental vaut : [V.4.4] [V.4.4]
La valeur efficace de l'ensemble du signal est donnée
par  [V.4.5]
[V.4.5]
L'association de deux cellules de base conduit au montage en
pont qui constitue la version la plus répandue de l'onduleur de tension
composée (cfr. Annexe).
La tension de sortie s'obtient comme la différence
vectorielle de deux tensions Veff1 et
Veff2. Cette technique permet, outre la suppression d'une
prise médiane sur la source, de régler l'amplitude de la
résultante par action sur le déphasage. La Fig.V.7 illustre
l'élaboration de la tension de sortie donnée par :  [V.4.6]
[V.4.6]
 [V.4.7] [V.4.7]
Avec
La valeur efficace du fondamental vaut dès
lors :  [V.4.8] [V.4.8]
Le signal ne comporte que des harmoniques impaires, dont
l'importance est modifiée par le réglage d'amplitudes selon un
facteur . .
La valeur efficace du signal total se déduit
aisément et est  (V.4.9) (V.4.9)
Comme le montre les expressions ci-dessus, l'amplitude est
théoriquement réglable entre 0 et 100 pour 100 mais en pratique
suite aux distorsions des harmoniques prépondérantes sur la
fondamentale aux faibles amplitudes, on se limite à une gamme de
réglage de 50 à 100 pour 100 ce qui revient à adopter une
valeur minimale 
Le passage au montage triphasé revient adjoindre une
troisième cellule élémentaire au pont monophasé des
fonctions fr(t), fs(t), fT(t) de
même fréquence et forme, mais déphasées entre elles
de 
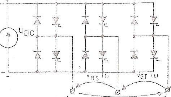
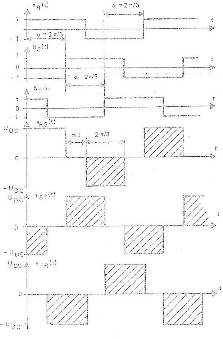
Fig.V.7.Caractéristique de la tension
de sortie
En considérant les bornes de sortie 2 à 2,
l'étude du fonctionnement se ramène rigoureusement à celle
de 3 montages monophasés en pont, travaillant sous décalage de
 ; les relations établies pour le pont monophasé. La somme
des angles de décalage entre cellules valent toujours ; les relations établies pour le pont monophasé. La somme
des angles de décalage entre cellules valent toujours 
Le décalage ne peut donc plus être modifié
pour effectuer un réglage d'amplitude, il faudra recourir à
d'autres techniques dont la modulation à largeur d'impulsion dans notre
cas. De plus la valeur de  entraîne l'annulation de toutes les harmoniques multiples de 3.
Il ne subsiste que dès lors que des harmoniques impaires d'ordre 6k+1=
5, 7, 11, 13... entraîne l'annulation de toutes les harmoniques multiples de 3.
Il ne subsiste que dès lors que des harmoniques impaires d'ordre 6k+1=
5, 7, 11, 13...
Introduisant ces particularités dans la loi de tension
du pont monophasé les tensions composées seront :
 (V.4.10) (V.4.10)
 (V.4.11) (V.4.11)
 (V.4.12) (V.4.12)
Avec  

 (V.4.13)
(V.4.13)
  (V.4.14)
(V.4.14)
V.4.5 Génération
alternative par modulation de largeur d'impulsion
Cette technique est fortement inspirée de celles
utilisées dans la transmission d'informations et consiste à
moduler une onde porteuse (pour nous issue d'un découpage à
fréquence Fd) par une onde modulante (fréquence Fs) à
fréquence beaucoup plus basse. Il existe néanmoins une
différence fondamentale puisque, à l'inverse de la transposition
spectrale recherchée en transmission, nous voulons générer
une composante basse fréquence à partir de l'onde porteuse. Pour
obtenir ce résultat, c'est la valeur moyenne de cette onde porteuse
définie sur la période Td qui est modulée tandis qu'elle
reste nulle en transmission. Piloté selon ce principe, un bras
d'onduleur, autour d'un point de polarisation que l'on fixe a la moitié
de la tension continue et se comportera donc comme un amplificateur à
découpage, dont les composantes harmoniques parasites liées
à la fréquence de découpage pourront être
éliminées.
Par filtrage, Insistons néanmoins sur le fait que cette
décomposition n'est possible que si la fréquence de
découpage est très supérieure à la fréquence
de la modulante. Dans le cas contraire, le spectre est unique, ce qui impose
d'optimiser les motifs de commande pour minimiser des composantes harmoniques
à basse fréquence n'appartenant pas à la modulante. Outre
cette dernière il existe aussi la génération alternative
par niveaux qui est une sorte de conversion numérique analogique
largement utilisée en électronique de traitement du signal que
nous n'allons ni développé ni utilisé.
V.4.6 Influence de la
fréquence de modulation
Le dimensionnement d'un onduleur est guidé par la
connaissance de deux fréquences bien distinctes et
généralement très différentes. La première
concerne la fréquence de découpage, qu'on souhaite la plus
élevées possibles pour réduire les filtres et augmenter
les performances dynamiques, mais qui devra rester compatible avec les
caractéristiques des semi-conducteurs (temps de commutation,
pertes...) .En pratique, cette fréquence dépend
énormément des applications et en particulier de la puissance.
Les valeurs typiques peuvent aller de quelques de hertz a 50hz pour des
puissances allant de quelques mégawatts à 1kw. La
fréquence de modulation, quant à elle, est imposée par le
réseau d'alimentation ou par les caractéristiques de la charge et
dans la plupart des cas elle est comprise entre 0 et 100hz. L'écart
important entre ces deux fréquences montre que tous les efforts faits
pour gagner du poids et du volume en augmentant la fréquence de
découpage peuvent être réduits à néant par la
préparation de composants réactifs ou de transformateurs
dimensionné pour la fréquence de modulation.
V.4.7 Mécanismes de
transfert de puissance
Les onduleurs de tension sont, par essence, réversibles
en puissance. Il est intéressant de développer quelques peu les
différents modes de fonctionnement résultant de cette
propriété. Considérons une fonction de modulation
unipolaire simple et symétrique dont le courant de sortie de l'onduleur
est parfaitement sinusoïdal et déphasé de phi par rapport au
fondamental de fm.
Trois modes de fonctionnement sont à distinguer :
a) Quand la puissance active délivrée par
l'onduleur est positive elle transite depuis la source continue vers la source
alternative, ceci pour -ð/2 < ö < ð/2 ce
mode de fonctionnement est classique
b) Quand la puissance active fournie par l'onduleur est nulle,
il n' y a que la présence de la puissance réactive
fondamentale ; l'onduleur, vis-à-vis de la source alternative, peut
fonctionner comme un compensateur d'énergie réactive. La valeur
moyenne du courant absorbé sur la source est nulle, elle peut être
résumé par un condensateur et la valeur de phi vaut
ö=#177; ð/2
c) Quand la puissance active délivrée par
l'onduleur est négative et transite depuis la source alternative vers la
source continue, la valeur moyenne du courant est effectivement
négative ; l'onduleur fonctionne alors comme un redresseur avec
ð/2 < ö < 3ð/2 [33]
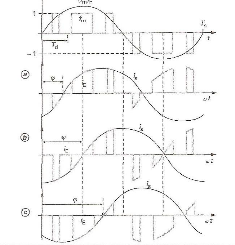
Fig.V.8.Mécanisme de puissance
V.4.8 Calculs sur
l'onduleur
Soient l'expression de la tension composée de sortie
triphasée de l'onduleur :
Pour f=50 Hz et UDC=285 Volts ;
V.5 INDUCTANCE DE
LISSAGE
Le filtrage de sortie par inductance est principalement
utilisé dans les générateurs devant se substituer aux
réseaux industriels. Le rôle du filtre est de réduire le
contenu harmonique haute fréquence du au découpage.
Une inductance est caractérisée par sa valeur en
henry, par le courant qui la traverse et l'énergie qu'elle est capable
d'emmagasiner .L'énergie joue ici un rôle important, c'elle qui
détermine le volume de l'inductance .Il existe en effet une
relation entre les grandeurs électriques de l'inductance de lissage du
courant d'un convertisseur et ses dimensions géométriques c- a- d
entre l'énergie que peut stocker une inductance et son volume.
La relation entre l'énergie stockée W et la
valeur de l'inductance L
L'énergie stockée par une inductance de valeur L
est 
avec 
n =nombre de spires
La reluctance du circuit magnétique est :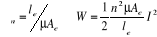
Avec : ,longueur effective ,longueur effective
 Section du circuit magnétique Section du circuit magnétique
Dimensionnement de l'inductance
Pour le dimensionnement de l'inductance, nous nous somme
fixé certaines conditions [32] ; la chute de tension que
provoquerait la bobine vaut :5 Volts admissible. Si on se fixe une
ondulation de courant de 10% du courant nominal (soit 4 A), la valeur L de
l'inductance de lissage est donnée par un fonctionnement à
rapport cyclique  ,par ,par

Connaît L et  donc, le flux donc, le flux  et l'énergie stockée et l'énergie stockée 
La relation liant le flux  est : est :
Après avoir fait le choix du matériau donc Bmax,
il sera question de déterminer  en fonction de la densité de courant J et du coefficient de
foisonnement á qui tient compte des isolants et de la place perdue. Dans
le cas où l'on veut ajuster ì en réalisant un entrefer
d'épaisseur e eu supposant que ce dernier est suffisamment faible pour
que le flux reste canalisé sur la relation en fonction de la densité de courant J et du coefficient de
foisonnement á qui tient compte des isolants et de la place perdue. Dans
le cas où l'on veut ajuster ì en réalisant un entrefer
d'épaisseur e eu supposant que ce dernier est suffisamment faible pour
que le flux reste canalisé sur la relation 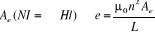
Pour notre part nous n'allons pas monter un entrefer ayant la
valeur de L par calcul nous allons consulter les catalogues des constructeurs
afin de réaliser un choix avec celui qui correspondrait pour notre
convertisseur mais ce serait encore plus facile de demander à notre
revendeur du convertisseur (onduleur) de nous fournir cette inductance s'il ne
a pas inséré dans le boîtier de ce dernier
Fig.V.9.Forme de la tension au bornes et
courant de cette inductance pour 
V.6.ASPECT ECONOMIQUE
Nous avons justifié techniquement l'utilisation d'un
moteur asynchrone suivi de deux structures à convertisseur à la
place d'un moteur synchrone, et il sera question dans ce paragraphe d'analyser
la faisabilité du projet en examinant les coûts
conséquents .Nous tenons à signaler que ce dernier n'est pas
une étude économique approfondie mais plutôt un
aperçu sur ce que peut coûter sa réalisation. Nous avons
laissé tomber la mise en oeuvre de la régulation mécanique
qui devait exiger des modifications à apporter à la structure
d'hydrolienne déjà conçu en plus de ces
inconvénients au profit de la régulation électronique
ci-dessus présentée. L'analyse de la faisabilité se fera
par l'estimation du prix d'achat pour chaque composant à commander puis
une sommation en suivra :
TableauV.1.Synthèse des prix du dispositif
électronique de contrôle de vitesse
|
Désignation
|
Caractéristiques
|
Prix en dollars USD ($)
|
|
Moteur Asynchrone
|
3x220v/15kw (20ch)
|
650
|
|
Redresseur à IGBT
|
entrée 3x220v/sortie300vmax continue
|
60
|
|
Onduleur à IGBT
|
entée 300v continue/sortie 3x220v
|
80
|
|
Dispositif de commande
Pour redresseur MLI
|
commande de la tension continue
|
25
|
|
Dispositif de commande
Pour onduleur MLI
|
commande de la fréquence et de la puissance
|
30
|
|
Bobine de lissage
|
L=4mH,I=50A
|
20
|
|
Condensateur de filtrage
|
400v/1000ìF
|
15
|
|
Total
|
|
880
|
Pour notre part,nous pensons que le coût du dispositif
que nous avons conçu est viable par rapport au coût global d'une
hydrolienne du type rutten Model delta 15KVA[2],équivalent au
notre,quoique la première partie de notre avant-projet n'a pu
été chiffrée..
CONCLUSION GENERALE
La qualité de la vie à la quelle aspire la
population mondiale est liée à la consommation de
l'énergie alors que cette dernière n'a cessé d'augmenter
et que le réchauffement climatique persiste. La RDC n'est pas seulement
un scandale géologique mais aussi hydrologique malgré que le taux
de desserte en énergie électrique reste encore faible en milieu
urbain .Face à cet état de chose en milieu rural ,il serait plus
évident de promouvoir des projets plutôt réactives en
adoptant une solution à long terme qui est l'hydrolienne .La
finalité de ce travail a été celui de concevoir un
système de régulation pour l'hydrolienne conçu et
dimensionnée pour la ferme Benjin Agriculture .Après une
brève présentation de cette dernière nous avons parler de
la régulation puis de l'électronique de puissance ,nous avons
présenté l'hydrolienne en définissant les
paramètres à réguler enfin nous somme passé
à la conception du système de régulation de la tension et
fréquence de sortie en fonction de la vitesse d'écoulement de
l'eau.
La principale contrainte est l'impossibilité d'agir sur
la vitesse d'écoulement de l'eau ce qui ne nous a pas permis d'utiliser
le régulateur mécanique.
Nous voici au terme de ce travail, après analyse nous
avons opter pour la mise en place d'un régulateur électronique,
comportant deux structures de convertisseurs statiques. Le premier est un
redresseur (AC de fréquence variable /DC) nous permet à travers
ces diverses possibilités d'absorber les fluctuations de la tension dues
aux variations de la vitesse d'entraînement en régulant la tension
continue. Le deuxième convertisseur (DC/AC de fréquence fixe
50hz) est un onduleur nous donnant la possibilité d'avoir une tension
de fréquence constante par un asservissement et de maintenir la tension
d'alimentation constante en fonction de la charge ceci en gérant le
transfert de puissance active et réactive.
En les mettant en place, les utilisateurs auront à leur
disposition une énergie électrique disponible et fiable à
un coût moindre même dans les milieux les plus reculés de
notre pays comme se sera le cas une fois le projet réalisé de la
Ferme Benjin agriculture.
Nous en appelons à d'autres chercheurs d'emboîter
nos pas dans le domaine des énergies renouvelables en faisant une
modélisation complète de l'hydrolienne et une simulation du
fonctionnement de celle-ci.
BIBLIOGRAPHIE
[1]François DIKATE « Possibilités
d'électrification de la RDC par microcentrales
hydroélectriques » CNE/ Février 2002, Inédit
[2]L'ex-Zaïre s'illumine - R_D_C_ - Energie - Belgique -
Afrique.mht, le 26 juillet 2001
[3] KAPENDA MUTSHAKA et MUTONJI
LUBUYA : « Conception d'une hydrolienne prévu pour
un projet d'électrification en milieu rural
décentralisé »(cas du projet d'électrification
de la ferme Benjin Agriculture),Mémoire ;UNILU, 2005-2006.
[4] Commission Nationale de l'Energie, R D Congo
[5] Renewables In Global Energy Supply. An IEA Fact Sheet.
International Energy Agency.Novembre 2002.
[6] Agence Nationale Pour la Gestion des Déchets
Radioactifs. http://www.andra.fr/
[7] Stuart Energy Station.
http://www.stuartenergy.com/main_our_products.html
[8] World Energy Outlook 2002. IEA Publications.
[9] Le baromètre du solaire thermique. Systèmes
solaires n°163. Octobre 2004.
EurObserv'ER.
[10] Agence de l'Environnement et de la Maîtrise de
l'Energie. http://www.ademe.fr
[11] Baromètre de la géothermie. Systèmes
solaires n°156. Août 2003. EurObserv'ER.
[12] Wood Energy Barometer. Systèmes solaires
n°158. Décembre 2003. EurObserv'ER.
[13] Association Hespul. http://www.hespul.org
[14] Photovoltaic Energy Barometer. Systèmes solaires
n°160. Avril 2004. EurObserv'ER.
[19] Systèmes solaires n°140. 2000.
EurObserv'ER.
[20] Waveenergy. http://www.waveenergy.dk
[21] LUKUMU MULAMBA : «cours d'Hydraulique
générale », cours ; UNILU/2002-2003 ;
Inédit
[22]KAMABU Tsongo : «cours d'Application de
l'Energie Electrique », cours ; UNILU/2005-2006 ;
Inédit
[23]LIASSA NKOYI : « Electronique de
puissance », cours ; UNILU/2005-2006
[24]SELEMANI KAVUBA : «Electronique de
puissance », cours ; UNILU/2006-2007
[25]KAMABU Tsongo : «Machines
Electriques », cours ; UNIKIN ,1995
[26]MOANDA Ndeko : «Automatismes et
régulation », cours ; UNILU/2005-2006
[27]SUMUNA
TEMO : «énergétique », cours ;
UNILU /2005-2006
[28]PANDA MABWE : «complément
d'Electrotechnique », cours ; UNILU/2005-2006
[29]Michel CHATAIN, « Conception d'un
objet »Techniques de l'ingénieur AM3810
[29]PHILIPPPE LETURCQ : « Composants
sémi-conducteurs de puissance ; caractère
propre »Technique de l'Ingénieurs, traité génie
électrique .D3100
[30]Henri FOCHE, François FOREST et Thierry
Meynard « Onduleur de tension, structures.principes,
applications »Techniques de l'Ingénieurs, traité
génie electrique.D3176
[31]Henri FOCHE, François FOREST et Thierry
Meynard , « Onduleur de tension,mise en
oeuvre »Techniques d'Ingénieurs ,traité génie
electrique.D3177
[32]Henri FOCHE, François FOREST et Thierry
Meynard : « Convertisseur du type Forward,
Dimensionnement »technique de l'Ingénieur, traité
Génie Electrique.D3167
[33]Jacques du PARC : « Convertisseurs
statiques, réduction de la puissance réactive et des
harmoniques »Technique de l'ingénieur, traité
Génie électrique.D3210
ANNEXES
ANNEXE I
Energies renouvelables en RDC [18]
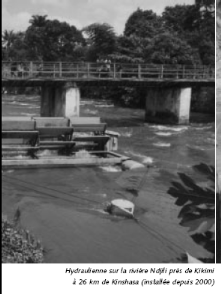
ANNEXE II
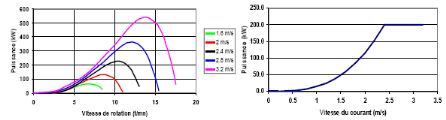
Réseau de caractéristiques de
puissance d'une hydrolienne en fonction de la vitesse de rotation et de la
vitesse du courant. Courbe de puissance typique d'une hydrolienne incluant un
écrêtage de la puissance
(Autorisation d'HydroHelix et Saipem)

Types d'hydrogénérateurs marins. De gauche
à droite : turbine à axe horizontal (HydroHelix), turbine
à axe vertical (Gorlov) et à aile oscillante (Stingray).
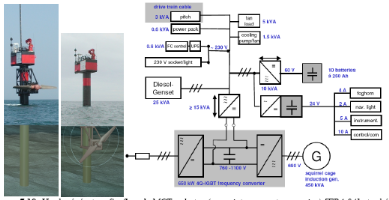
Hyrdogénérateur Seaflow de MCT : photos (en
maintenance et en service) et schéma fonctionnel électrique
(Courtesy of Marine Current Turbines™ Ltd).

Système Stingray (Engineering Business Ltd) à
aile hydrofoil : dessin, photographie du prototype et vue d'artiste d'une ferme
sous marine .
ANNEXE II (suite)
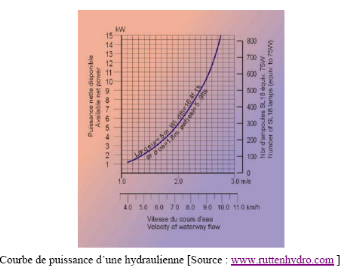
ANNEXE III : LA RIVIERE KISWISHI

Partie prévue pour l'emplacement de l'hydrolienne sur la
rivière Kiswishi


Rivière Kiswishi, Mini rapide
Rivière Kiswishi, en aval du mini rapide
Endroit idéal pour placer l'hydrolienne sur la
rivière Kiswishi
ANNEXE IV. CONVERTISSEURS ELECTRONIQUES DE
PUISSANCE

Différents boîtiers des modules IGBT
TABLE DES MATIERES
EPIGRAPHE.........
.....................................................................................
I
DEDICACE.........
.......................................................................................
II
AVANT-PROPOS
.........................................................................................III
INTRODUCTION GENERALE
1
CHAPITRE I : PRESENTATION DE LA FERME BENJIN
AGRICULTURE ET SA PUISSANCE ELECTRIQUE NETTE
4
I.1. PRESENTATION DE LA FERME BENJIN
AGRICULTURE.
4
I.1.1 Données Hydrologiques De La Riviere
Kiswishi
6
I.2 GENERALITES SUR LES ECOULEMENTS A SURFACE
LIBRE
7
I.2.1 Introduction
7
I.2 PUISSANCE ELECTRIQUE NETTE DE LA FERME
9
I.2.1 Introduction
9
I.2.2 Hypothèses
10
I.2.3 Méthodologie de calcul
10
I.2.4 Evaluation des puissances installées
(pi) et d'utilisation (pui) par classe de
consommateurs.
13
CHAPITRE II : ETAT DE L'ART ET SITUATION
DE L'HYDROLIENNE DANS LE CONTEXTE DES ENERGIES RENOUVELABLES
16
II.1. GENERATION D'ENERGIE RENOUVELABLE
18
II.1 GENERATION DE LA CHALEUR
20
II.1.1 Thermo solaire
21
II.1.2 Géothermie
21
II.1.3 Biomasse
23
II.3 GENERATION D'ELECTRICITE
24
II.3.1 Photovoltaïque
24
II.3.2 Production éolienne
26
II.3.3 Hydraulique
27
CHAPITRE III : GENERALITES SUR LA REGULATION
AUTOMATIQUE ET L'ELECTRONIQUE DE PUISSANCE
37
III.1. LA REGULATION AUTOMATIQUE[22].
37
III.1.2 Définitions
38
III.2 REPRESENTATION GRAPHIQUE D'UN SYSTEME
ASSERVI
39
III.3. LES DIFFERENTS TYPES DE SYSTEMES
40
III.4 SYSTEME BOUCLE
41
III.5. STABILITE
43
III.6 LES DIFFERENTES TECHNIQUES [23]
44
III.7 EXEMPLE DE BOUCLE DE REGULATION
45
III.2 ELECTRONIQUE DE PUISSANCE
46
III.2.1 Généralités
46
III.2.2 Les interrupteurs [23]
48
Fig.III.1.Synthèse sur les interrupteurs de
puissance
48
Historique
48
Les diodes
50
Les MOSFET de puissance
51
Les Transistors bipolaires de puissance
52
Les IGBT
52
Les thyristors
52
Commutation dure et commutation douce
53
Quelques dispositifs
54
CHAPITRE IV : PRESENTATION DE
L'HYDRAULIENNNE DIMENSIONNEE POUR LA FERME BENJIN AGRICULTURE AINSI QUE LES
PARAMETRES A REGULER
55
IV.1 PRESENTATION DE L'HYDROLIENNE [4]
55
IV.2 LA ROUE HYDRAULIQUE
57
IV.2.1 Détermination des quelques grandeurs
géométriques
58
IV.3 LA GENERATRICE ELECTRIQUE
62
IV.3.1. La génératrice continue
63
IV.3.2. La génératrice asynchrone
63
IV.3.3 La génératrice synchrone ou
alternateur
65
IV.4.LES FLOTTEURS
66
CHAPITRE V : ETUDE ET CONCEPTION DU SYSTEME DE
REGULATION DE FREQUENCE EN FONCTION DE LA VITESSE DE LA ROUE DE
L'HYDROLIENNE
67
V.1 LE DISPOSITIF MECANIQUE DE CONTROLE
69
V.2 LE DISPOSITIF ELECTRONIQUE DE CONTROLE DE
FREQUENCE: GENERATRICE ASYNCHRONE +CONVERTISSEUR DE PUISSANCE
71
a)Principe général.
71
b) Alimentation utilisant un redresseur à
diode et un onduleur contrôlés par MLI
72
c) alimentation utilisant un redresseur et un
onduleur contrôlé par MLI
73
V .1.1 GÉNÉRATRICE
ASYNCHRONE
74
V.2 LE REDRESSEUR
77
V.2.1 Pont de Graetz classique
79
V.3 LE CONDENSATEUR DE FILTRAGE
83
V.4 L'ONDULEUR
84
V.4.1. Généralités
84
V.4.2 Principe de la conversion
86
V.4.3 Fonction de modulation de la cellule
87
V.4.4 Caractéristiques de la tension de
sortie [32]
88
V.4.5 Génération alternative par
modulation de largeur d'impulsion
92
V.4.6 Influence de la fréquence de
modulation
92
V.4.7 Mécanismes de transfert de
puissance
93
V.4.8 Calculs sur l'onduleur
94
V.5 INDUCTANCE DE LISSAGE
95
V.6.ASPECT ECONOMIQUE
97
CONCLUSION GENERALE
99
BIBLIOGRAPHIE
101
ANNEXES
103
TABLE DES MATIERES
111
 
* 1 Confère annexes 4, 5,
6
* 2 William Froude (1810 - 1879)
: Ingénieur anglais qui a contribué à l'avancement de
l'hydraulique et de la mécanique des fluides. Ses travaux ont surtout
porté sur les vagues et les écoulements à surface libre.
Le nombre de Froude a été nommé ainsi, en 1919, par le
professeur allemand Moritz Weber (1871 - 1951) en l'honneur de Froude qui, en
réalité, ne l'a jamais utilisé.
* 3 Insulated Gate Bipolar
Transistor.
| 

