Etude et conception d'un système de régulation automatique de la fréquence et de la tension de sortie d'une hydrolienne en fonction de la vitesse de la roue (cas du projet d'électrification décentralisée de la ferme Benjin Agriculture).( Télécharger le fichier original )par Eric KABANSHI Université de Lubumbashi - Ingénieur Civil Electromecanicien 2007 |

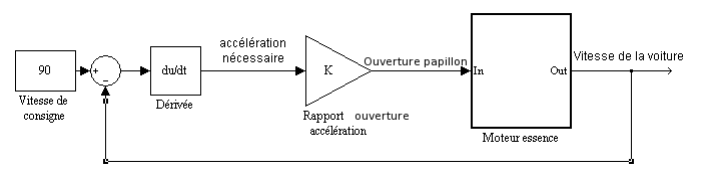
III.6 LES DIFFERENTES TECHNIQUES [23]Il existe différentes techniques pour synthétiser les régulateurs. La technique industrielle la plus largement utilisée est le régulateur PID qui calcule une action Proportionnelle, Intégrale et Dérivée en fonction de l'erreur consigne/mesure. Cette technique permet de satisfaire la régulation de plus de 90% des procédés industriels. Néanmoins, de nombreuses techniques de commandes dites « avancées » peuvent être utilisées pour la régulation de systèmes plus complexes lorsque le régulateur PID est insuffisant : · La commande prédictive se basant sur l'utilisation d'un modèle dynamique du système pour anticiper son comportement futur. · La commande robuste permettant de garantir la stabilité par rapport aux perturbations et aux erreurs de modèle. · La commande adaptive qui effectue une identification en temps réel pour actualiser le modèle du système. · La logique floue utilisant un réseau de neurones ou un système expert. · Les contrôleurs non linéaires utilisant la théorie de Aleksandr Lyapunov, comme les commandes linéarisantes ou la commande par modes glissants, plus robuste. · La commande par platitude différentielle, qui permet l'inversion de modèle sans passer par l'intégration des équations différentielles, et ainsi de calculer les signaux nécessaires sur les entrées pour garantir les trajectoires voulues en sortie. III.7 EXEMPLE DE BOUCLE DE REGULATIONReprenons l'exemple du moteur automobile. On le commande en choisissant l'ouverture du papillon des gaz intégré au système d' injection du moteur. L'ouverture est directement liée à la force appliquée sur le piston donc à l' accélération du véhicule. Disons qu'elles sont proportionnelles (on néglige les pertes et la résistance de l'air sur le véhicule). On veut maintenir une certaine vitesse, 90 km/h par exemple.
90 km/h est la consigne, il faut la comparer à la vitesse réelle
donnée
par un
tachymètre.
Figure III.2 Schéma d'un système de régulation. En réalité, à cause des pertes, il faut maintenir une certaine accélération entre autres pour lutter contre la résistance de l'air. |
|