c) alimentation utilisant un
redresseur et un onduleur contrôlé par MLI
Pour cette structure, le redresseur à diode est
remplacé par un convertisseur à IGBT contrôlé par
MLI fonctionnant à fréquence variable. La vitesse de la
génératrice est alors parfaitement contrôlable, une
meilleure capture de la puissance est obtenue par rapport à la structure
précédente (fig.V.2). Un deuxième convertisseur, à
MLI connecté au réseau est nécessaire pour
générer des grandeurs à 50 Hz sur le réseau
électrique isolé de distribution.
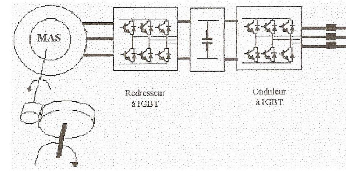
Fig.V.3 Alimentation avec deux redresseurs
MLI
V .1.1
GÉNÉRATRICE ASYNCHRONE
Il s'agit en fait d'une une machine à induction
asynchrone triphasée qui transforme de l'énergie mécanique
en énergie électrique. Pour réaliser cette transformation
elle doit pour cela être entraînée au-delà de la
vitesse de synchronisme (variable suivant la charge). Son rotor est
généralement à cage d'écureuil ; elle
bénéficie donc de la robuste simplicité du moteur à
cage et des mêmes moyens de fabrication. La puissance nécessaire
à sa magnétisation est fournie par le réseau lorsqu'elle
est couplée en parallèle ou par une batterie de condensateurs
dans le cas d'une utilisation isolée comme c'est le cas pour notre
travail.
Ø Principe de fonctionnement d'une
génératrice asynchrone [25]
Une
génératrice synchrone (alternateur) est entraînée en
fonctionnement normal à sa vitesse de synchronisme (par exemple 1500
tr.min-1 pour 4 pôles). La génératrice
asynchrone elle, doit être entraînée au-delà de sa
vitesse de synchronisme pour fournir de l'énergie électrique.
Cependant, ces machines asynchrones ne possèdent pas comme les
alternateurs un circuit d'excitation. II faut néanmoins fournir la
puissance de magnétisation aussi bien en génératrice qu'en
moteur; il ne s'agit pas d'une puissance utilisable, appelée puissance
active, mais d'une puissance fictive, puissance réactive, correspondant
à une composante du courant à facteur de puissance nul. Ce
courant peut être emprunté au réseau mais peut aussi bien
être obtenu de façon statique en branchant en parallèle
à la machine une batterie de condensateurs. En outre, en ajustant ces
condensateurs de façon précise, il est possible, dans certaines
conditions, d'utiliser une génératrice asynchrone en dehors d'un
réseau, fonctionnement autonome pour alimenter une charge isolée
qui dans notre cas est le réseau de distribution de la Ferme Bejin. Le
stator aura 3 enroulements couplés en étoile ou en triangle qui
seront alimentés par le système triphasé de tensions. Il
en résultera alors une création d'un champ magnétisant
glissant dans l'entrefer de la machine (Théorème de FERRARIS). La
vitesse de glissement de ce champ par rapport au stator est : (V.1) (V.1)
 où ùS désigne la pulsation du
réseau du réseau d'alimentation triphasé statorique et
p est le nombre de bobines de chaque bobinage et également le
nombre de paires de pôles du champ magnétique apparaissant au
stator. Le rotor de la machine supporte un bobinage triphasé avec un
même nombre de pôles que celui du stator. Le rotor de la machine
supporte un bobinage triphasé avec un même nombre de pôles
que celui du stator couplé en étoile. Ce type de rotor est dit
bobiné on peut envisager un rotor plus sommaire constitué de
barres conductrices court-circuitées par un anneau conducteur à
chaque extrémité. Ce second type de machines est appelé
machine asynchrone à cage. Le rotor tourne par rapport au stator
à la vitesse où ùS désigne la pulsation du
réseau du réseau d'alimentation triphasé statorique et
p est le nombre de bobines de chaque bobinage et également le
nombre de paires de pôles du champ magnétique apparaissant au
stator. Le rotor de la machine supporte un bobinage triphasé avec un
même nombre de pôles que celui du stator. Le rotor de la machine
supporte un bobinage triphasé avec un même nombre de pôles
que celui du stator couplé en étoile. Ce type de rotor est dit
bobiné on peut envisager un rotor plus sommaire constitué de
barres conductrices court-circuitées par un anneau conducteur à
chaque extrémité. Ce second type de machines est appelé
machine asynchrone à cage. Le rotor tourne par rapport au stator
à la vitesse   (V.2) , (V.2) ,
 étant l'angle entre le repère statorique et le
repère rotorique. étant l'angle entre le repère statorique et le
repère rotorique.

Fig.V.4.Position des axes des phases
statoriques et rotoriques
La fig.V.4 rappelle la position des axes des phases
statoriques et rotoriques dans l'espace électrique (angle
électrique est égal à l'angle réel multiplié
par le nombre p de paire de pôles par phase.
Le sens des enroulements de phase est conventionnellement
repéré par un point(.) ;un courant positif i
entrant par ce point crée un flux  compté positivement selon l'orientation de l'axe de
l'enroulement. compté positivement selon l'orientation de l'axe de
l'enroulement.
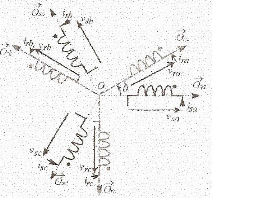
Fig.V.5 Représentation de la machine
asynchrone dans l'espace électrique[28]
| 

