Chapitre 1
Le problème de la stratégie de
Rendez-vous
1.1 Introduction
Dans ce chapitre, le problème de rendez-vous est
présenté où un ensemble d'agents mobiles réalise
une convergence à un point commun. Pour cela, nous commencerons par
présenter un aperçu sur les systèmes multi-agents, leur
application aux robots mobiles et plus précisément à la
stratégie de rendez-vous. Les différentes approches
présentées dans la thèse de Stephen L. Smith [1] seront
étudiées dans le chapitre 2.
1.2 Agents et Systèmes multi-agents
1.2.1 Définitions
· Agent
Un agent est une entité (physique ou abstraite)
caractérisée par le fait qu'elle est autonome dans la prise de
décision, par ses connaissances sur elle même et sur les autres,
et par sa capacité d'agir.
Ce peut-être un processus (en gestion des processus dans
les systèmes d'exploitation), un robot (dans un environnement
industriel), un être humain (en sociologie), etc.
Pour Weiss (1999), un agent est une "entité
computationnelle", comme un programme informatique ou un robot, qui peut
être vue comme percevant et agissant de façon autonome sur son
environnement. voir figure 1-1
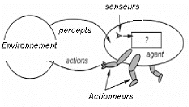
FIG. 1-1 - Interaction d'un agent avec son environnement
Caractéristiques d'un agent:
- un agent est une entité autonome mais fortement
dépendante des autres.
- un agent communique à l'aide de messages, ou par partage
d'informations. - un agent est autonome, il peut refuser de faire ce qu'on lui
dit de faire.
- les agents peuvent être spécialisés: un
agent ne sait pas faire beaucoup de choses mais
ce qu'il sait faire, il le fait vite et bien et le met en commun
avec les autres agents.
· Système multi-agents
Un système multi-agents (SMA) est constitué d'un
ensemble de processus informatiques se déroulant en parallèle,
donc de plusieurs agents vivant au même moment, partageant des ressources
communes et communicant entre eux.
Le point clé des SMA réside dans la formalisation
de la coordination entre les agents.
Partant de la définition que donne Ferber(1995) [2]
d'un agent logiciel, on peut définir cette entité comme un
système informatique situé dans un environnement, capable de
mener de manière autonome des actions sur cet environnement en vue
d'accomplir ses objectifs, possédant en plus les
propriétés de :
Réactivité : il perçoit des stimuli
provenant de son environnement et réagit en fonction de ceux-ci.
Proactivité : il est mû par un certain nombre d'objectifs qui
guident ses actions.
Sociabilité : il communique avec d'autres agents ou des
humains et, peut se trouver engagé dans des transactions sociales
(négocier ou coopérer pour résoudre un problème)
afin de remplir ses objectifs.
On parle ainsi d'intelligence artificielle distribuée.
L'une des grandes sources d'inspiration pour les
systèmes multi-agents a été l'étude des
comportements sociaux de certaines familles d'insectes. Dans ce domaine, on se
référera utilement aux articles Intelligence collective et
Intelligence distribuée.
Les SMA peuvent être vus comme la rencontre de divers
domaines :
· l'intelligence artificielle pour les aspects prise de
décision de l'agent.
· l'intelligence artificielle distribuée pour la
distribution de l'exécution.
· les systèmes distribués pour les
interactions entre agents.
· le génie logiciel pour l'approche agents et
l'évolution vers des composants logiciels de plus en plus autonomes.
Les SMA peuvent être partagés en deux types
d'architectures [3], en fonction du type de contrôle adopté :
SMA à contrôle centralisé ou a base de
tableau noir
Composé de trois éléments :
- Les connaissances représentées par les
agents.
- Le tableau noir: qui est une zone de travail commune,
dévolue à la transition d'informations entre les
différents agents. Chacun peut venir le consulter à sa guise, y
prélever et y déposer des objets qu'il peut également
modifier. Le tableau structure la modélisation du domaine d'application
comme l'espace des hypothèses et des solutions.
- Le mécanisme de contrôle : concerne les
contraintes sur les relations entre les conversations des protocoles qui
régissent le système, et au quels l'agent peut participer
simultanément ou successivement.
Le SMA à contrôle centralisé possède
en outre les propriétés suivantes :
- Pas de communication directe entre les agents.
- Interaction via le partage d'un même espace de travail
qui est le blackboard. - Mal adapté aux SMA large échelle.
SMA a contrôle distribué
- Une distribution totale des connaissances et du
contrôle.
- Caractéristiques :
· Traitement local.
· Communication entre agents par envoi de messages.
- Le langage d'Acteur est la technique la plus utilisée
pour la mise en oeuvre de ce type
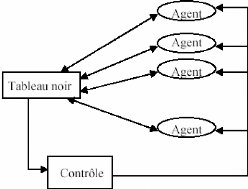
FIG. 1-2 - Architecture d'un SMA à contrôle
centralisé
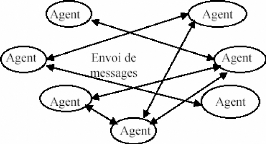
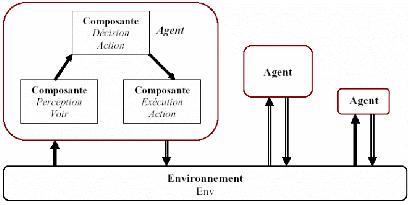
FIG. 1-4 - Structure d'un agent réactif dans un
environnement multi-agents
d'architecture. Un Acteur regroupe au sein d'une même
entité un ensemble de connaissances : les accointances, un script.
1.2.3 Classification des agents
Les experts des systèmes multi-agents ont
classifié ces derniers (agents) en deux grandes catégories selon
un critère essentiel qui est la représentation de son
environnement, et sont donc les agents réactifs et les agents cognitifs,
et les systèmes dits hybrides.
Agents réactifs
On parle ici de système intelligent d'agents. Les
agents sont simples et ne possèdent pas une représentation de
leur environnement, ni de mémoire, ce qui les prive d'apprentissage et
de toutes anticipations aux évènements. Ils sont
caractérisés par l'absence de structures organisationnelles
initiales prédéfinies, d'où les agents agissent
naturellement au moment où l'action est nécessaire. Leur
comportement est de type «stimuli - réponses».Voir figure
1-4
Les SMA dotés d'agents réactifs
possèdent généralement un grand nombre d'agents. Le
comportement de groupe est impressionnant lorsqu'il s'agit de coordonner
certaines actions, telles que leur déplacement.
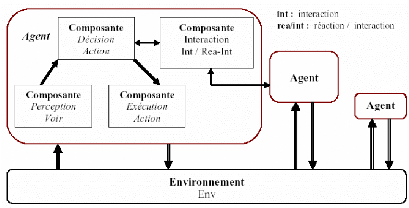
FIG. 1-5 - Structure d'un agent cognitif dans un environnement
multi-agents
Agents cognitifs
On parle ici de système d'agents intelligents. Les
agents cognitifs sont plus évolués, résultats des
recherches menées dans le domaine de l'intelligence artificielle. Ils
possèdent une représentation globale de leur environnement et des
agents avec lesquels ils communiquent, ils tiennent aussi compte de leurs
actions antécédentes. Chaque agent possède une base de
connaissances comprenant l'ensemble des informations nécessaires
à l'accomplissement de sa tâche, ainsi qu'à l'interaction
avec l'environnement et les autres agents. Voir figure 1-5
Les SMA constitués d'agents cognitifs compte un petit
nombre d'agents «intelligents», exigent des ressources plus
importantes que les agents réactifs, et permettent de résoudre
des problèmes plus complexes.
Agents hybrides
Ce type d'architecture combine les agents réactifs et
cognitifs, qui sont généralement distribués sur plusieurs
niveaux ou couches. La couche de haut niveau, délibérative,
rassemble des agents purement cognitifs, s'occupe du raisonnement et de la
prise de décision du système. La couche de bas niveau ne
rassemble que des agents réactifs qui exécutent
généralement des tâches élémentaires sous les
ordres de la couche supérieure ou par leurs propre initiative. La (les)
couches intermédiaires, peuvent regrouper les deux types d'agent
(réactifs et cognitifs), le nombre de couches intermédiaires
dépend du modèle du système à concevoir.
| 

