
REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET
POPULAIRE
MINISTERE DE L'ENSEIGNEMENT SUPERIEUR ET DE LA
RECHERCHE
SCIENTIFIQUE
UNIVERSITE DJILLALI LIABES DE SIDI BEL ABBES
FACULTE
DES SCIENCES DE L'INGENIEUR
DEPARTEMENT D 'ELECTROTECHNIQUE
MEMOIRE
PRESENTE PAR
Mr. BENTAALLAH ABDERRAHIM
Pour l'obtention
du diplôme de :
MAGISTER EN ELECTROTECHNIQUE
Option :
Conversion d'énergie et commande
Intitulé :
LINEARISA TION ENTREE SORTIE ET REGLA GE FLOU
D'UNE
MACHINE ASYNCHRONE AVEC PILOTAGE VECTORIEL ET
OBSERVATEUR A MODE
GLISSANT
Soutenu le : .../... /2005
Devant le jury composé de
Président Mr.Y. RAMDANI Professeur, U.Sidi Bel
Abbés
Encadreur Mr.A. MEROUFEL Maître de
conférences, U.Sidi Bel Abbés
Examinateurs Mr.M.K. FELLAH Professeur, U.Sidi Bel
Abbés
Mr.H. SAYAH Maître de conférences, U.Sidi
Bel Abbés
Mm.H. BOUNOUA Maître de conférences, U.Sidi
Bel Abbés
Mr.M. ABID Chargé de cours, U.Sidi Bel
Abbés
Laboratoire ICEPS

REMERCIEMENTS
Je remercie mon encadreur Monsieur A. MEROUFEL, Maître de
conférence à
l'université de Sidi Bel Abbés,
pour le suivi et l'intérêt qu'il a apporté à ce
travail.
Je tiens à remercier Monsieur Y. RAMDANI, Professeur
à l'université de Sidi Bel
Abbés, pour m'avoir fait
l'honneur de présider mon jury.
Toute ma reconnaissance va également aux membres du jury
:
Monsieur M.K. FELLAH, Professeur à l'université de Sidi Bel
Abbés,
Monsieur H. SAYAH, Maître de conférence à
l'université de Sidi Bel Abbés, Madame
H. BOUNOUA,
Maître de conférence à l'université de Sidi Bel
Abbés
ainsi que Monsieur M. ABID, Chargé de cours à
l'université de Sidi Bel Abbés,
pour leur participation en
tant qu'examinateurs.
Je remercie sincèrement Monsieur A. MASSOUM,
Maître assistant à l'université de
Sidi Bel
Abbés, pour avoir co-dirigé ce travail ainsi que pour ses
nombreux conseils
et son soutien tout au long de ce mémoire.
Mes vifs remerciements à Monsieur A. BENDAOUD,
Maître de conférence à
l'université de Sidi Bel
Abbés, pour son soutien moral et ses encouragements.
En dernier, je ne manque pas de remercier ma famille et mes
amis pour leur patience
et leur dévouement.
DEDICA CES
A la mémoire du défunt Monsieur
A.BOUDIS SA,
Maître de conférence à l'université
de Sidi Bel Abbés, un ami et un frère
que je ne cesserai de
regretter moi et tous ceux qui l'ont connu.
SOMMAIRE
INTRODUCTION GENERALE 1
Chapitre I : MODELISATION DE L'ENSEMBLE
MACHINE
ASYNCHRONE-ONDULEUR DE TENSION
I-1. Introduction 4
I-2. Modélisation de la machine asynchrone 4
I-3. Hypothèse simplificatrice 4
I-4. Modélisation 4
I-5 Equations générales de la machine asynchrone
5
I-6. Transformation de Park 8
I-7. Modèle de la machine asynchrone en
représentation d'état 11
I-8. Simulation 12
I-9. Onduleur de tension 14
I-10. Conclusion 18
Chapitre II : COMMANDE VECTORIELLE DE LA
MACHINE
ASYNCHRONE
II-1. Introduction 19
II-2. Théorie du flux orienté 19
II-3. Commande vectorielle indirecte et régulation 21
II-4. Simulation 28
II-5. Conclusion 29
Chapitre III : COMMANDE NON LINEAIRE DE LA
MACHINE
ASYNCHRONE
III-1. Introduction 30
III-2. Système mono entrée mono sortie (S.I.S.O)
30
III-3. Système multi-entrées multi-sorties
(M.I.M.O) 32
III-4. Commande non linéaire de la MAS alimentée en
tension 34
III-5. Simulation 39
III-6. Interprétation des résultats de simulation
41
III-7. Conclusion 41
Chapitre IV : DECOUPLAGE NON LINEAIRE
AVEC
ORIENTATION DU FLUX
IV-1. Introduction 42
IV-2. Linéarisation exacte par retour d'état 42
IV-3. Modèle de la machine 43
IV-4. Application de la commande linéarisante au moteur
45
IV-5. Simulation 46
IV-6. Interprétation 48
IV-7. Conclusion 48
Chapitre V : COMMANDE NON LINEAIRE AVEC OBSERVATEUR
DU
FLUX PAR MODE DE GLISSEMENT
ET ESTIMATEUR DE VITESSE
V-1. Introduction 49
V-2. Association machine-observateur 49
V-3. Observateur non linéaire classique 49
V-4. Observateur par mode de glissement 54
V-5. Conclusion 65
Chapitre VI : CONTROLE PAR REGLAGE FLOU DE LA
MCHINE
ASYNCHRONE
VI-1. Introduction 66
VI-2. Définition de notions sur les ensemble flou 66
VI-3. Opérateur sur les ensembles flou 67
VI-4. Raisonnement en logique flou 69
VI-5. La commande floue 70
VI-6. Conception du régulateur flou 73
VI-7. Type de régulateurs flous 74
VI-8. Application du contrôleur flou en réglage de
la vitesse 76
VI-9. Avantages et inconvénients de la logique floue
77
VI-10. Simulation 77
VI-11. Résultats de simulation et interprétation
78
VI-12. Test robustesse 80
VI-13. Conclusion 81
CONCLUSION GENERALE 82
BIBLIOGRAPHIE
NOTATIONS
Indices
r Indice des grandeurs rotoriques
s Indice des grandeurs statoriques
á,â Indices des grandeurs liées au
repère ou statorique
d,q Indice des grandeurs du repère de Park dq
ref Indice des grandeurs de référence
p Indice des grandeurs du système
o Indice pour les observateurs
Principales grandeurs
X Grandeur physique
X Grandeur conjuguée
·
X Grandeur transposée
t
X i Grandeur physique relative au courant
Xu Grandeur physique relative à la tension
Uc Tension délivrée par le redresseur
U,V Tension
I,i Courant
vsd Tension statorique instantanée dans l'axe d
vsq Tension statorique instantanée dans l'axe q
i sd Courant statorique instantané dans l'axe d
i sq Courant statorique instantané dans l'axe d
v sá Tension statorique instantanée dans l'axe
á
v sâ Tension statorique instantanée dans l'axe
â
è Angle entre phase
è s Angle entre l'axe d et le stator
èr Angle entre l'axe d et le rotor
ù s Pulsation statorique
ù sl Vitesse de glissement
Ù r Vitesse mécanique de rotation
Ce Couple électromagnétique
Cr Couple résistant
Ö Flux
à
Ö Flux estimé
Kp Coefficient proportionnel
Ki Coefficient d'intégration
Ku Coefficient de commande
Ke Coefficient de l'erreur
r Taux de modulation
m Indice de modulation
E f.e.m
á(x), â(x) Fonction non linéaire
Lfh(x) Dérivée de Lie de h(x) le long de
f(x)
D(x) Matrice de découplage
zi(1,2,...) Changement de variable
u1 Commande linéaire
u2 Commande non linéaire
ì A Fonction d `appartenance
e Erreur d'estimation
K Gain d'observation
à
Vs Représente le vecteur des tensions
observées
Ë Matrice des gains de dimension (n x r)
Matrice carrée (r x r)
S Vecteur surface
à
f Modèle d'estimation
Paramètres de la machine
Rs Résistance statorique
Rr Résistance rotorique
Ls Inductance cyclique statorique
Lr Inductance cyclique rotorique
M Inductance mutuelle
p Nombre de paires de pôles
Tr Constante de temps rotorique
J Inertie totale des pertes mobiles
f Coefficient de frottement
Caractéristiques de la MAS P = 1.5kW
U = 380/220 -50Hz
I = 3/6A
N = 1450tr/mn
p =2
Rs = 4.85?, Rr = 3.81?
Ls = 0.274H, Lr = 0.274H , M = 0.25 8H
J = 0.031Kgm2 , f = 0.01 14Nm/rd/s
INTRODUCTION
GENERALE
Introduction générale
INTRODUCTION GENERALE
La machine asynchrone est une machine électrique
utilisée principalement dans les applications industrielles. Ses
principaux avantages sont : sa conception simple, son coût peu
élevé, sa sûreté de fonctionnement, sa robustesse et
sa maintenance économique.
A partir de ces considérations analogiques, elle est de
plus en plus utilisée pour des commandes performantes en
remplaçant avantageusement le moteur à courant continu.
La difficulté du couple pose un grand problème
de commande.Grâce aux progrès technologiques des semi-conducteurs,
à la possibilité des convertisseurs de fréquences
statiques, il devient facile d'obtenir un système de contrôle de
la machine asynchrone à vitesse variable.
Cependant, de nombreux problèmes demeurent. L'influence
des variations des paramètres de la machine, et la présence d'un
capteur mécanique et autant de difficultés qui ont aiguisé
la curiosité des chercheurs dans les laboratoires. La majorité
des processus à commander présente des modèles non
linéaires fortement couplés, de nombreuses techniques de
contrôle non linéaire sont apparues pour tenter de
linéariser le comportement entrée- sortie du système non
linéaire et ce quelque soit le point de fonctionnement.
La technique de linéarisation entrée-sortie
proposée par Isidori (89) et Fliess (95) sous
difféomorphisme et bouclage permet de linéariser mais
également de découpler les entrées- sorties du
système. Donc, il est maintenant possible de décomposer le
modèle de la machine asynchrone en sous système mono-variables
linéaires et découplés par la technique de la commande non
linéaire.
L'emploi des observateurs du flux est
généralement utilisé dans la commande des variations de
vitesses à courant alternatif. On rencontre dans la littérature
technique, plusieurs méthodes d'observateurs de flux
déterministes (observateur de Luenberger, observateur de
Gopinath, observateur par mode glissant etc....) et stochastiques
(observateur étendu, filtre de Kalman).
Dans notre travail, on a opté pour l'observateur de
flux à mode glissant, qui présente une contre réaction
robuste. D'autre part, pour une simplicité de commande non
linéaire avec observateur du flux à mode glissant, on a
préféré l'utilisation d'un estimateur de vitesse en vue
d'éliminer le capteur mécanique et de réduire
l'encombrement de la machine. Cette structure de commande non linéaire
simplifiée, présente de bonnes performances avec le
régulateur classique, si le système est invariant. Cependant, la
machine au cours de son fonctionnement, elle peut être
déréglé par des perturbations internes et externes, que le
régulateur classique ne peut les contrôlées.
Pour palier à ce problème, il existe plusieurs
méthodes de commandes robustes et de commandes adaptatives,
exposées dans la littérature technique, on a
préféré la commande par logique floue qui
représente la modélisation du raisonnement d'un opérateur
expert en
1
Introduction générale
contrôle. Pendant longtemps, les recherches en commande
floue n'ont intéressé qu'un nombre restreint de chercheurs, car
malgré le succès du contrôle flou dans le domaine
industriel, les automaticiens ont souvent été très
critiques à l'égard de cette technique. Parmi les remarques
invoquées, on trouve :
- L'absence de résultats sur la stabilité dans les
problèmes de commande floue.
- L'absence d'explication profonde de la robustesse des
systèmes de commande floue.
Il a fallu attendre la dernière décennie pour que
des méthodes de commande floue assurent la stabilité et parfois
la robustesse des structures de commande.
Nous avons jugé utile d'organiser ce présent
travail en six chapitres :
- Dans le chapitre I, nous proposons une
modélisation classique de la machine asynchrone en vue de sa commande et
du convertisseur statique en utilisant la transformation de Parck.
Le système triphasé est remplacé par un
modèle biphasé équivalent qui peut être vu dans un
référentiel lié au champ tournant. Nous présentons
un résumé sur la commande MLI de l'onduleur, puis nous
étudions l'association MAS onduleur avec régulateur classique.
Le modèle adopté est validé par une
simulation.
- Le deuxième chapitre est
consacré à la commande vectorielle indirecte de la machine
asynchrone alimentée en tension avec régulateur classique PI. Le
dimensionnement des coefficients du correcteur est calculé selon le
principe du pole dominant. Les résultats de simulation montrent le
découplage et les performances de cette stratégie de commande.
- Le troisième chapitre,
présente la commande non linéaire de la machine
asynchrone alimentée en tension, qui est basée sur la
géométrie différentielle et qui a pour objectif de
découpler et de linéariser le système en n'importe quel
point de fonctionnement. Ensuite, nous montrerons quelques résultats de
simulation qui illustrent le comportement de la commande non
linéaire.
- Le quatrième chapitre, traite le
comportement de la commande non linéaire avec orientation du flux, nous
nous intéressons à l'application du réglage par retour
d'état linéarisante (Feedback Linearization) à un
actionneur asynchrone, cette technique nous permet de linéariser et de
découpler le système par l'utilisation de l'outil
géométrie différentielle. Enfin la structure de la
commande est testée par simulation sur le modèle de la machine
asynchrone.
2
Introduction générale
- Le cinquième chapitre,
présente le concept général de la commande non
linéaire de la machine asynchrone avec observateurs du flux et de
vitesse rotoriques. Nous étudions un observateur non linéaire
d'ordre réduit avec terme classique et un observateur non
linéaire du flux par mode de glissement et estimateur de vitesse
rotorique. Enfin, nous présentons l'application de cette technique sur
la machine asynchrone dont la synthèse du réglage est
basée sur les modèles obtenus par orientation du flux
rotorique.
- Le sixième chapitre, comporte
l'étude du régulateur flou, nous présentons le
régulateur flou et nous développons le rôle de chaque bloc.
Ce type de correcteur permet de définir les lois de commande
linguistiques à base des règles d'inférences pour le
contrôle non linéaire de la machine asynchrone alimentée en
tension sans capteur mécanique et avec observateur par mode glissant.
Enfin, nous terminons par une conclusion générale
où nous essayons de décrire l'importance et
l'intérêt de ce travail.
3
CHAPITRE I
MODELISATION DE L'ENSEMBLE
MAS-ONDULEUR DE TENSION
CHAPITRE I: MODELISATION DE L'ENSEMBLE
MACHINE ASYNCHROME-ONDULEUR DE TENSION
I-1. Introduction
L'objectif de ce chapitre est l'élaboration du
modèle de la machine asynchrone triphasé destiné aussi
bien à l'étude de son comportement qu'à la mise en place
des fonctions de la commande.
Ensuite, on rappelle brièvement le modèle du
convertisseur statique et on clôture par une simulation de la machine
associée à un onduleur de tension.
I-2. Modélisation de la Machine
Asynchrone
La machine asynchrone, de part sa simplicité de
conception, a la faveur des industriels depuis son invention par NIKOLA
Tesla à la fin du siècle dernier, quand il découvrit
les champs magnétiques tournants engendrés par système de
courants polyphasés.
D'autre part, à la différence du moteur à
courant continu où il suffit de faire varier la tension d'alimentation
de l'induit pour faire varier la vitesse.
Une modélisation convenable permet de décrire
le comportement de la machine en régime statique et dynamique. A cet
effet nous avons choisit la modélisation de la machine asynchrone
triphasé à cage adaptée à la commande en tension en
utilisant la méthode de Park qui permet de transformer la machine
triphasé en machine biphasé équivalente.
Les équations obtenues peuvent alors êtres
écrites soit dans un repère fixe, ou mobile.
Ce système d'équation sera transcrit sous forme de
schéma-block de manière à être simulé
à l'aide du logiciel Simulink/Matlab. [1,2]
I-3. Hypothèses simplificatrices
La modélisation s'appuie sur un certain nombre
d'hypothèses [1, 2,3] :
· Une parfaite symétrie de la machine
· L'absence de saturation et de pertes dans un circuit
magnétique
· La répartition spatiale sinusoïdale des
différents champs magnétiques le long de l'entrefer.
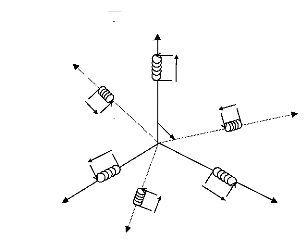
I-4. Modélisation
La machine asynchrone représentée par le
schéma de la figure (I-1) se compose :
· D'un circuit porté par le stator comportant trois
phases identiques décalées dans
l'espace faisant entre elles un angle égale à
2ð .
3
· D'un circuit rotorique mobile comportant trois phases
identiques en courts-circuits
vbr
Bs
décalées entre elles de
As
Cr
Cs
vcr icr
vcs
ics
ias
vas
è
ibr
var
Ar
iar
vbs
ibs
2ð .
3
Br
Fig. I-1. Représentation schématique de
la machine asynchrone
En désignant par :
- OAs, OBs, OCs : les axes des
trois phases statoriques
- OAr, OBr, OCr : les axes des
trois phases rotoriques.
- è = (OAs, OAr) : angle entre la phase d'axe A
du stator et la phase A du rotor.
I-5. Equations générales de la machine
asynchrone I-5-1. Equations électriques
Dans ces conditions, le fonctionnement électrique de la
machine est décrit par un système d'équations
[1,2,3,4].
· Pour le stator
d Ö
v R .i as
= +
as s as dt
(I-1)
d Ö
v R .i bs
= +
dt
bs s bs
d Ö
v R .i cs
= +
cs s cs dt
Sous forme matricielle :
v 0 0 i
as as
v
bs = 0 R s 0 i bs
v
cs 0 0 R s i cs
? Ö ?
d (I-2)
? as ?
+ ? Ö ?
bs
dt ? ?
? Ö cs ?
C'est à dire
[ s ] [ ] [ s ] dt [
s ]
d
(I-3)
v = R . . i + Ö
Tel que :
? v ? R 0 0 ?
? ?
i ?
? Ö ?
? as ? s as
? ? ? ? as ?
[ s ]
v = ? v ? ; [ R s ] = ; [ ]=
? 0 R 0 i ? i ? ; [ ÖS ]= Ö
? ?
s
bs s bsbs
? ? ? ? ? ? ?
? v ? 0 0 R s ?
cs ? ? i cs ? ? Ö cs ?
· Pour le rotor
d Ö
v R .i ar
=+
ar r ar dt
d Ö
(I-4)
v R .i br
= +
br
dt
r br
d Ö
v R .i cr
=+
cr r cr dt
Sous forme matricielle :
R 0 0
r
v
br = 0 Rr 0 i br
v
cr 0 0 Rr ? i cr
v
ar
? i
ar
? Ö ?
d (I-5)
? ar ?
+ ? Ö ?
br
dt ? ?
? Ö cr ?
C'est à dire :
(I-6)
[ s ] [ s ] [ s ] dt
[ s ]
d
v = R . . i + Ö
Tel que :
? v? ? ? ?
? i ?
? R 0 0 Ö
? ar ? r ?ar ? ? ar
?
? ?
[ ]=
v ? v ? ; [Rr]=0 R 0 ? ; [ ]=
? i ? i ? ; [ Ör ]= ? Ö ?
r
r br r br br
? ? ? ? ? ? ? ?
? v ? 0 0 R r ?
cr ? ? i cr ? ? Öcr?
En désignant par :

? i
? as
? i
? bs ? ? i
? cs
?
? ? iar
? ? ? ibr
? ? icr
3)
-
Ö
2ð
l m m
s s s
m. cos m. cos( 2 3) m. cos(
è è + ð è
as
m.
(I-7)
- ð è
2 3) m.cos
3)
cos( 2
è + ð
cos( è
Ö
bs
m m
Ö
cos( 2 3) m. cos(
è + ð è
- ð è
2 3) m.cos
s s
cs
m l m m.
s s s
l m.
s
v , b s
v , cs
v :les tensions appliquées aux trois phases du stator
as
i , bs
i , cs
i : les courants qui parcourent les enroulements statoriques
as
Ö , bs
Ö , cs
Ö : Les flux résultants à travers ces trois
phases
as
R: La résistance de chaque enroulement du stator et en
adoptant pour le rotor les mêmes notations
I-5-2. Equations magnétiques
Pour évaluer les flux, on remarque que l'entrefer
étant constant, le stator et le rotor étant triphasés et
de construction symétrique, les inductances propres et mutuelles entre
phases d'un même enroulement sont constantes et égales.
On désigne par :
- l : inductance propre d'une phase statorique tel que
s
l=
bs
l )
cs
(l s = =
l
as
- m : inductance mutuelle entre deux phases du stator tel que
s
|
( =
m
s
|
m =
as
|
m =
bs
|
m)
cs
|
- l : inductance propre d'une phase rotorique tel que
r
l=
br
l )
cr
( =
l =
l
rar
- m : inductance mutuelle entre deux phases du rotor tel que
r
|
( =
m
r
|
m =
ar
|
m =
br
|
m)
cr
|
Donc les équations des flux sont :
· Pour le
stator
· Pour le rotor
? i
? as
? i
? bs ? ? i
? cs
?
? i
ar
?
? ? ? ibr
? ? icr
3)
m
r
l m m
r r r
l m m.
r r
l m.
m m
r
r r
m. cos m. cos( 2 3) m. cos( 2
è è + ð è - ð
- ð è
2 3) m. cos
cos( 2
è + ð
cos( è
m.
cos( 2 3) m. cos(
è + ð è
- ð è
2 3) m.cos
Ö
ar
Ö
br
Ö
cr
3)
(I-8)
Par concaténation des deux formes matricielles (I-7) et
(I-8), on aura :
? [ ] [ ] ? [ ]
? l l ? i ?
ss sr s
? = ? [ ] [ ] ? ? [ ]?
? ? l l
sr rr ? ? i r ?
(I-9)
? ? ?
Ö
s
Ö
r
Avec :
?l m m ? ?l m m ?
s r ?
[ ]
l ; [ ]
? ? ?
= l ;
m l m
? m l m ? = ? ?
ss s rr r
? ?
?m m l ? ?
s ? ? m m l r ?
?
? Ö ? ? Ö ? ? i ? ? i
as ar as ar
? ? ? ? ? ? ?
[ ]
Ö = i i
? Ö ? ; [ ]
Ö = i ; [ ]
?
? Ö I
? ; [ ] = ? ?
s bs r br s bs ? = ?
r br
? ?
?
? Ö ? ?
cs ? ? Ö ? ?
cr ? ? i ? ?
cs ? ? I cr

?
?
?
??
)
[ ]
l sr
=
m
?
?
?
??
cos(2 3)
è - ð
cos(2 3
è - ð
cos
è è + ð è
cos( 2 3) cos(
) cos( 2 3 cos
è + ð è
cos
è è + ð
cos( 23)
- ð
23
I-6. Transformation de Park
La transformation de Park correspond à un changement de
base qui permet de diagonaliser les matrices d'inductances [5]
La matrice de changement de base dans un cas
général, et pour un angle è s est définie

? 1?
? cos( s ) sin( s )
è - è ?
? 2 ?
? 1 ?
= è - ð - è - ð (I-10)
? cos( s 2 / 3) sin( s 2 / 3)
2
3
2 ?
?
1 ?
3 ? ?


par :
[ ]
P( s )
è
On notera que le changement de base s'écrit:
(UAB) = [P(ès)].(UNB); avec AB signifiant
« Ancienne Base » et NB « Nouvelle Base »
ou base de Park .
Le changement de base pour une matrice [U] donne alors:
[U]NB= [P(è S)]-1 . [UAB]; ou [P(è
S)]-1 est la matrice inverse de [P(ès)] . Elle est
définie par:
-
-
s
4 / 3)
ð
2 / 3)
ð
cos(è
cos( ) cos(
è è
s s
s s s
) sin( 2 / 3) sin(
- è - ð - è
? ? ? ? ?
??
-
sin(è
1
1
2
-
4 / 3)
ð
1
2
2
[ ] 1
P( s ) -
è =
3
2
(I-11)
Nous négligeons la composante homopolaire car nous
considérons que le système est équilibré.
? cos( ) cos( 2 / 3) cos( 4 / 3)
è è - ð è - ð ?
s s s
2
[ ] 1 ?
P( s ) -
è = - è - è - ð - è - ð
sin( ) sin( 2 / 3) sin( 4 / 3) ? (I-12)
s s s
3 ? ?
? ?
? ?
La transformation de Park consiste à appliquer aux
courants, tensions et flux un changement de variables faisant intervenir
l'angle entre l'axe des enroulements et les axes d et q.(Fig.I-2)
On désigne par è s : l'angle entre l'axe d et le
stator. è r : L'angle entre l'axe d et le rotor.
q
ès
èr
èsr
d
As= ás
Fig. I-2. Transformation du repère
(á,â) vers (d,q)
a) Equations des tensions
V ds
R I
s ds
d Ö
Ö qs
ds
+ - ù s
dt
(I-13)
|
Vqs
|
R s
|
Iqs
|
+
|
d Ö qs
|
+ ù Ö
s ds
|
|
dt
|
- On notera le couplage de
ds
V avec qs
Ö et Vqs
avec Ö ds
On aura les mêmes équations au niveau du rotor en
changeant partout l'indice 's' en 'r' et en annulant les tensions puisque le
rotor est en court-circuit.
b) Equations des flux
que :
Ö ds
Ö qs
Il est facile de montrer en effectuant des opérations
à partir des équations déjà données,
L I M I
s ds sr dr
+
Iqr
(I-14)
L I M
s qs sr
+
c) Equations définitives de la
machine
|
Vds
|
dI dI dr
R I L
+ +
ds M
s ds s sr
dt dt
|
-
|
ùs
|
(Ls
|
I M
qs sr
+
|
I )qr
|
(I-15)
dIqs
dt

V R I L
qs s qs s
= +
dI qr
+ + ù
Msr s
dt
(L I M I
)
s ds sr dr
+
d) Equations du couple
Ce = p(Ö dsIqs - Ö qs I
ds ) (I-16a)
Il est possible d'obtenir d'autres expressions en utilisant les
expressions des flux statoriques.
Ce =pMsr(Idr.Iqs - IqrIds ) (I-16b)
Ou bien on fait appel aux flux rotoriques:
|
3 M
C e = Ö - Ö
sr
p ( I I )
dr qs qr ds
2 L r
|
(I-1 6c)
|
Quelle que soit l'une des trois expressions, on constate que le
couple électromagnétique résulte de l'interaction d'un
terme de flux et d'un terme de courant.
Dans le cas de l'utilisation de repère lié au
champ tournant, la machine est modélisée par :
?
?
??
Vds
?
?
??
Vqs
R 0 ? I ? ? Ö ?
? ?
s ds + ?? ? Ö ds (I-17)
?
ds d ? 0 s
- ù ?
?
?? 0 R ?? ? + dt ? ?
? ?
??
s ? ?
? I ? ?
qs ? ? Ö ù 0 ?
s ?
qs ? ? Ö qs ?
?
?
??
0
?
?
??
Vdr
=
0
Vqr
?
?
??
?
?
j
R 0 ? I ? ? Ö ?
? ?
r dr + ??
? 0 ? Ö dr
? ?
dr d - ù sl
?
?? 0 R ?? ? + dt ? ?
? ?
??
r ? j ? I ? ?
qr ? Ö ù 0 ?
sl ?
qr ? ? qr
Ö ?
ùsl = vitesse de glissement.
A partir de ce système d'équations et des relations
liant les flux et les courants on peut mettre en équation la machine et
son alimentation.
Le changement de variables peut être
interprété comme le remplacement des enroulements réels
par des enroulements fictifs (ds, qs), (dr , qr) dont les axes
magnétiques sont liés aux axes
d et q. (Fig.I-3).
Vds
ès
Iqr
Vqs d
Idr
As
q
Fig.I-3. Machine Asynchrone vue dans le repère
d,q
e) Equations mécaniques
Un dernier point indispensable de la modélisation du
moteur asynchrone est l'équation mécanique de la machine qui en
décrit le mouvement
d r
Ù (I-18)
dt
= e - r - Ù r
(C C f ) / j
Ù = : vitesse mécanique de rotation, C r : couple
résistant
r
r
Avec :
ù
p
f : coefficient de frottement , j : inertie totale des pertes
mobiles I-7. Modèle de la Machine Asynchrone en
représentation d'état
La représentation d'état de la machine
asynchrone dépend du repère choisi et du choix des variables
d'état pour les équations électriques. On écrit les
équations dans le repère (d,q) car c'est la solution la plus
générale.
Le choix des variables d'état, dépend des objectifs
soit pour la commande soit pour l'observation [5].
I-7-1. Modélisation de la Machine Asynchrone
alimentée en tension
Pour une machine asynchrone à cage alimentée en
tension, la forme la plus adaptée en représentation d'état
est :
X & = A.X + B.U Avec [ ]T
X = I ds I qs Ö dr Ö
qr (I-19)
On introduit le coefficient de dispersion donné par
l'équation suivante :
2
M
ó = 1 - (I-20)
L L
s r
? ? ? ? ?
A= ?
?
?
?
?
?
ë
- ù s
M
Tr
0
K
T
( )
ù - ù
s r
K
ù ù
s r

-
K
.
ë
ùr
1
0
-
Tr
M
-
Tr
( )
ù - ù
s r
-
Tr
?
K
. ?
?
?
?
r (I-21)
?
?
?
1 ?
?
r
T ?
U = V ds V qs (I-22)
[ ]T
1 0 00 ? T
|
B
|
ó L s
|
1
|
|
|
(I-23)
|
|
0
|
00
|
|
|
ó L s
|
??
|
|

M
R1
s
K
.
ë
,
L . + .L .L 2
ó .
L s .L
s
r
r
ó
ó
M2Rr
s r
L
T = ,
r
r R
I-8. Simulation
La simulation est devenu un moyen d'étude des
systèmes complexes dans le domaine des machines électriques. Elle
permet de décrire le fonctionnement de notre système (MAS) avec
une grande précision.
Plusieurs logiciels sont utilisés pour la simulation,
nous utilisons le logiciel (Simulink) dans l'environnement `'MATLAB», pour
la simulation de la machine asynchrone triphasé alimentée en
tension.
La résolution des équations différentielles
non linéaire est faite par la méthode de RangeKutta
d'ordre 4 (ode 45).
Le système d'équation (I-2 1) est mis sous forme
d'un schéma bloc représentant la machine dans le repère
lié au champ tournant (Fig.I-4)

12
Le système d'alimentation de tension est sinusoïdal
:
è
2ð
-
3
4ð
?
?
?
? ?
?
?
?
??
-
)
3
?
?
?
?
?
?
? ?
)
Va
Vb
V c
2.Ueff
cos
cos(è
cos(è
(I-24)
(I-26)
La transformation abc/áâ des tensions est
donnée par l'équation suivante :

V V
=
á a
1
(V V )
b c
-
V â
3
La transformation áâ/dq des tensions est
donnée par l'équation suivante :
?? ?? ?
- è è
sin cos
s s ? V â
? cos sin
è è ? ? V
s s á
L'analyse des variables de la machine asynchrone nécessite
une alimentation vue dans le repère d-q (Fig.I-5).
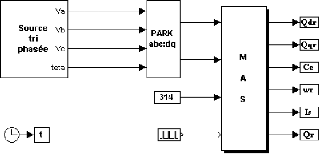
Fig I-5. Schéma bloc de la simulation de la
MAS alimentée en tension
I-8-1. Résultats de la simulation
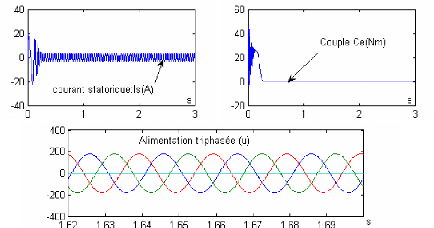
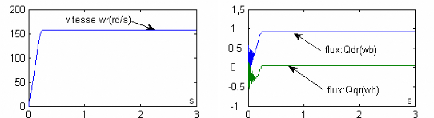
Fig I-6. Simulation de la MAS alimentée en
tension
Le courant, le couple et le flux présentent au
démarrage un régime oscillatoire amorti permettant à la
vitesse de passer par un régime transitoire.
I-9. Onduleur de tension
Les interrupteurs utilisés dans ces convertisseurs
(onduleur, cyclo-convertisseur) sont commandés de manière
à imposer une tension ou un courant alternatif dans les enroulements
statoriques de la machine suivant une loi de commande
(hystérésis, MLI) qui est fonction de la position du rotor de
manière à imposer le courant ou la tension en amplitude et en
phase.
Les onduleurs de tension alimentent les machines à courant
alternatif à partir d'une source de tension continu.

Ils permettent d'imposer aux bornes de la machine des tensions
d'amplitude et de fréquence réglable par la commande.
I-9-1. Modélisation de l'onduleur
Commande MLI

M A S
K1
K2 K4 K6
K3 K5
E
Fig.I-7 Onduleur avec commande MLI
Dans ce paragraphe nous présentons le modèle d'un
onduleur triphasé, alimenté par une source de tension
continue.
Ici pour notre cas, les composants semi-conducteurs sont
modélisés par des interrupteurs idéaux. Dans le cas
où les trois phases conduisent, avec la condition que :
Va + Vb +Vc =0
Les interrupteurs (K1, K2, K3, K4, K5, K6) sont commandés
par la technique MLI, on considère le cas de la commande définie
par :
1 k1 fermé et k4 ouvert
S1= 0 k1 ouvert et k4 fermé
1 k2 fermé et k5ouvert (I-27)
S2= 0 k2 ouvert et k5 fermé
1 k3 fermé et k6 ouvert
S3= 0 k3 ouvert et k6 fermé
D'après l'onduleur schématisé par la figure
I-7 et le système d'équation (I-27), on obtient les tensions
imposées aux bornes des phases du moteur par la relation suivante [6,7]
:

S3
S1
? ? ?
??
S2
? ?
? ?
? ?
? ? ?
?
(I-28)
1
21 -
? ?
? E ?
=
? 3 ?
? ? ?
?
211 - -
11 2
-
? ? ?
??
Va
Vb
V c
A partir de l'équation (I-28), on peut modéliser
l'onduleur utilisé dans notre simulation. I-9-2. Commande de
l'onduleur
Dans plusieurs domaines d'application industriel on exige
l'amélioration des performances et le contrôle de la
fréquence et l'amplitude de la tension de sortie du convertisseur.
Le développement de microélectronique et de
composants de l'électronique de puissance a permis l'application de la
commande MLI.
Nous exposons en dessous, une méthode parmi les plus
répondues est la technique triangulo-sinusoidale : elle consiste
à comparer deux signaux l'un est un signal triangulaire appelé
porteuse de fréquence fp et d'amplitude Up, l'autre est un signal
sinusoïdal appelé Modulatrice de fréquence fm et
d'amplitude Um, l'intersection de ces deux signaux donne le signal
MLI.
Le signal MLI détermine les instants de fermeture et
d'ouverture des interrupteurs. Dans ce cas deux paramètres
caractérisant la commande :
r=
Um

Up
f p

m =
- Le coefficient de réglage en tension :
- L'indice de modulation :
f m
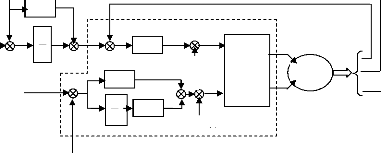
I-9-3. Schéma bloc de simulation de la machine
asynchrone avec onduleur
La source de tension et l'onduleur à MLI sont vus dans le
repère dq, pour alimenter la machine de Park liée à ce
même repère.
Le schéma bloc de simulation est illustré par la
figure (I-8)
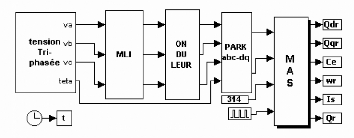
Fig I-8. Bloc de simulation de l'association
16
MAS alimentée en tension avec
onduleur
I-9-3-1. Résultats et interprétations de
simulation de la MAS avec l'onduleur
Les résultats de simulations illustrées par les
figures (I-6) et (I-9), montrent l'évolution de la vitesse, du couple,
du courant de la ligne et du flux lors de démarrage à vide de la
machine asynchrone alimentée en tension puis une application de la
charge en régime statique entre les instants 1s et 2s figure I-10
- Le démarrage à vide sous pleine tension permet
d'avoir un établissement rapide du régime permanent.
- Le transitoire du courant de phase à une durée
équivalente au temps de démarrage avec une pointe de 20A. Le flux
présente des oscillations lors des premiers instants de la mise sous
tension.
- Lors de l'application d'un échelon de couple
résistant de 10 Nm pendant une durée d'une seconde, le couple
électromagnétique compense cette sollicitation du couple
résistant, tandis que la vitesse et le flux subissent une diminution
importante. Par contre pour le courant statorique, on observe une
augmentation.
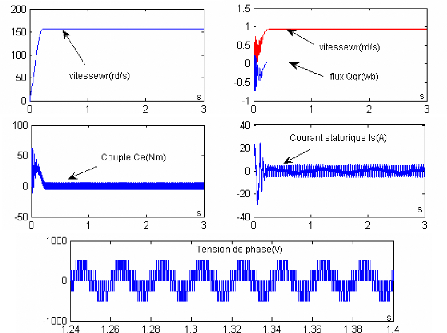
Fig. I-9 Schéma de simulation de la MAS
alimentée par un onduleur de tension à MLI
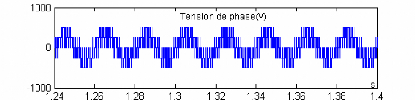
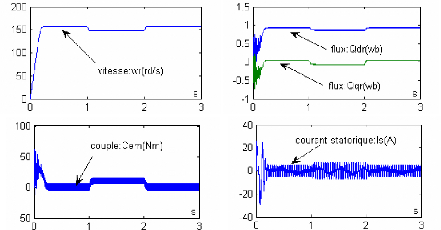
Fig I-10. Réponse à un échelon
de vitesse avec application d'une charge entre
1s et 2s d'une MAS
alimenté par un onduleur de tension à MLI
I-10. Conclusion
Dans ce chapitre on a présenté la
modélisation de l'association MAS-convertisseur dans le cas idéal
et le cas avec MLI.
Les résultats obtenus en simulation montrent une
même allure pour les deux cas, la différence réside dans
l'introduction des fluctuations au niveau du couple dues à la technique
MLI. On remarque que le flux et le couple (figure I-10) sont couplés.
Donc, il est utile de trouver une méthode de commande
permettant de rendre leur contrôle indépendant. Ainsi, le chapitre
suivant fera l'objet du découplage par une technique d'orientation du
flux.
CHAPITRE II
COMMANDE VECTORIELLE
DE LA MACHINE ASYNCHRONE
CHAPITRE II: COMMANDE VECTORIELLE DE LA
MACHINE ASYNCHRONE
II-1. Introduction
Le but de ce chapitre est de présenter les principes
de base de la commande vectorielle par orientation du flux rotorique
alimentée en tension , qui permet d'obtenir le découplage entre
le couple et le flux ainsi qu'une réponse dynamique rapide afin
d'arriver à un bon régime statique. Ensuite on choisi les
correcteurs classiques et on termine notre chapitre par des simulations.
II-2. Théorie du flux orienté II-2-1.
Principe
Le principe de la commande par orientation du flux consiste
à placer le repère (d,q) tournant tel que l'axe `d' coïncide
avec l'axe du vecteur flux.
A cet effet, le courant (Ids) contrôle le flux
et le courant (Iqs) contrôle le couple.
Or le couple est donné par.
|
C
e
|
3
2
|
p
|
M
sr
L
r
|
( Ö
dr
|
i
qs
|
-
|
Ö
qr
|
i
ds
|
)
|
Si le repère est parfaitement orienté, alors la
composante Ö qr = 0 et Ö dr = Ö r
L'avantage d'utiliser ce repère est d'avoir des grandeurs
constantes en régime permanent. d
Le modèle lié au champ tournant ( s
è ) ; donc le couple devient :
= ù
dt
|
C
e
|
3
2
|
p
|
M
sr
L
r
|
( Ö
r
|
.i )
qs
|
Le flux résultant Ö peut être soit :
%o Le flux statorique avec les conditions : Ö = Ö
ds= Ö s et Ö qs = 0
%o Le flux rotorique avec les conditions : Ö = Ö dr =
Ö r et Öqr = 0
%o Le flux d'entrefer avec les conditions : Ö = Ö dg =
Ög et Ö qg = 0
Remarque
Le contrôle du flux statorique ou d'entrefer n'assure
pas un découplage total, entre le couple et celui du flux [6,9,13] .Donc
notre objectif ici est d'étudier le principe de la commande vectorielle
avec orientation de l'axe `d' suivant l'axe du flux rotorique, car elle
présente de
meilleurs performances par rapport aux autres techniques
d'orientation [13], et elle permet aussi d'obtenir un couple de
démarrage important, mais nécessite une adaptation des
paramètres rotoriques.
ès
Iqs
Ids
Is
Ôr
â s
q
d
ás
Fig II-1. Principe de la commande
vectorielle
II-2-2. Orientation du flux rotorique
En imposant les conditions de l'orientation du flux rotorique :
( Ö = Ö dr= Ö r et Ö qr = 0)
et en développant les équations, on obtient de
l'équation d'état (I-19), Le modèle
réduit lié au champ tournant est défini par (II-1)
1
K
. Ö
dr
+
ó
v
ds
.
L
s
T
.
r
ù.
1
K.
Ö
dr
+
ó
.v
qs
L
s
r
.
ë .i
ds
-
i
qs
M
+ù +
.i
s qs
di
ds
dt
d Ö
dr
dt
M
T
r
1
-
T
r
i
ds
dè
sr
dt
T
r
Ö
r
-
.
i
ds
ù
s
- -
ë .i
qs
dt
di
qs
Ö
dr
(II. 1a)
(II. 1b)
(II. 1c) (II-1)
(II.1d)

(II.2a)
(II.2b)
(II-2)
3 pM
2JL
r
C
e
2
p
L
r
Ö
r
.i
qs
3M
f
C
r
r
-
-
J
Ö
r
Ù
r
.i
qs
J
d Ù
r =
dt
20
L'équation mécanique se réduit à :
On remarque que de l'équation (II-1c), le flux est
proportionnel àÇ. M
Ö = (II-3)
(p) I
1 pT
+
dr
r
ds
Ö (p) dr = M.I d s en régime permanent
Et de l'équation (II-2b), le couple est proportionnel a I
à condition que r
Ö est constant.
qs
Considérons le couple *
C e et le flux *
Ö r comme référence de commande,
nous inversons
les équations de r
Ö et e
C , on obtient :
*
? *
? d Ö ?
r ?
T . + Ö
ds r dt
M
? r ?
? ?
2.L C
qs
3.p.M
Ö
r
r e
i = .
*
(II-4)
Ces équations donne le principe de l'orientation du flux
rotorique (OFR), dont le schéma bloc est donné par la figure
(II-2) [14,15].
Fig II-2. Commande en courant par orientation du flux
rotorique.
|
Le filtre passe bas
|
|
1
|
permet de rendre les blocs physiquement réalisables.
|
|
1+
|
s.T0
|
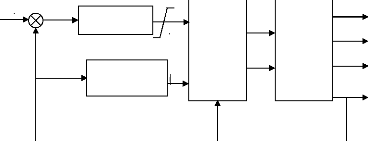
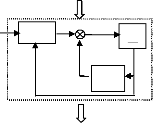
II-3. Commande vectorielle indirecte et régulation
II-3-1. Introduction
La commande est dite indirecte lorsque la position du flux
considéré est calculée à partir de la mesure de la
vitesse du rotor et d'autres grandeurs accessibles, comme les tensions ou les
courants statoriques [12].
Ö r
Ce
Is
Ù

II-3-2. Commande vectorielle indirecte par orientation du
flux rotorique
Dans le cas ou une régulation de vitesse est
envisagée, il suffit de prendre la commande indirecte déjà
présentée en ajoutant un régulateur PI pour la boucle de
vitesse et contrôle du flux rotorique par réaction Fig. II-3
[2,9,16].

Ù ref
+
-
Régulateur
Bloc non Linéaire
Ör *
*
C
e
DE COU PLA GE
M A S
Fig II-3. Schéma fonctionnel de la commande
vectorielle indirecte de la MAS
alimentée en tension.
BNL : bloc non linéaire est défini par la relation
:
Ö r si Ù ref = Ùr
Ö r = (II-5)
Ù
Ö si Ùref > Ù r
ref
r. Ù r
II-3-3. Le découplage
Le flux réduit à sa seule composante `d' peut
être commandé par le courant Ids et le couple par le
courant Iqs. D'après les équations (I-21), (I-23),
(I-24) et en imposant à la variable ès d'avoir une
valeur telle que Öqr soit nulle, on obtient :
)i
ds
2
)i
qs
2
M
ù
s s
+ ù ó +
. L .i
s sds r
L
r
di
v L
= ó + +
ds (R
dss dt s
di
qs
v L
= ó+ +
(R
qs s s
dt
óL
(II-6)
2
M
-
ù
.
L
r
R
r
2
M
L
r
R
r
*
M
-
2
L
r
Ö
r
R
r
.i
qs
*
Ö
r
Dans ces équations les composantes des deux axes (d, q)
sont couplées.
Leur découplage est possible par l'introduction de deux
nouvelles variables vds1 et vqs1, telles que
vds1 n'agisse que sur ids et
vqs1 sur iqs.
D'après les conditions de l'orientation du flux rotorique
: ( Ö = Ö dr = Ö r et Ö qr = 0), nous pouvons
avoir les équations suivantes :

d Ö
(1
)
ó
-
r
(II-7)
dt
M
U
ó + = + ó ù -
ds ds
T i T i T
sdt dsR s s qs
dI
s
s
ó
di U (1 )
- ó
qs qs
T + = - ù ó +

i ( T .i T Ö
s dt qs R s s ds s r
M
s
Les équations montrent bien que les deux axes d, q sont
couplés. On défini les deux nouvelles variables comme suit :
di

v R ( T ds
ds 1 = s ó s + (II-8)
ds i )
dt
di
v R
=
qs 1 s
i
qs )
ó s +
qs
( T
dt
Nous aurons :
)
I(p) ds
L .p + R s
s
/(
ds 1
= v ó
= v/(óL s .p + R s ) (II-9)
I(p)
qs
qs 1

Nous obtenons les équations de découplage suivantes
:

=
v
ds1
1
(
+
1
+
ó T
s
.p
ù
s
v )
qs1
T (1 )
-ó
T
r
L (1)
-ó
s
M.T
r
v T
-ó
ds1 s
s
v
ds
Ö
r
(II-10)
.v +
qs1
v v
=
qs qs1
ó T
s
+ù .(
s ó +
T .p 1
s
L . (1 )
-ó
. Ö
r )
s
M
Le système d'équation (II-8) et (II-10) peut
être représenté par le schéma fonctionnel Fig. II-4
:
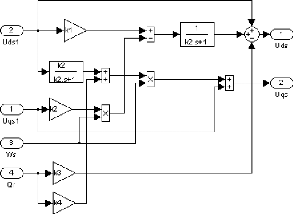
Fig II-4. Schéma fonctionnel du circuit de
découplage
II-3-4. Structure de la commande vectorielle indirecte
Ù
-
+
Bnl
Rv
Ör *
Ce
ùsl ùs
ùr
O F R
p
+
-
+
Ids *
I qs *
+
-
M
T .p 1
r +
R.Ids
R.Iqs
Ids
Iqs
vds1
Ör
vqs1
Dé- cou pla- ge
?
.
Park abc / dq
vds
vqs
?
MLI
+ On -du -leur
Ia
Ib
Ic
Ua
Ub
Uc
GT
M A S
ref
Fig II-5. Schéma fonctionnel de la commande
vectorielle alimentée en tension par
orientation du flux
rotorique
Rv, R.Iqs, R.Ids : représentent
respectivement régulateurs de type PI, de vitesse du courant Iqs et du
courant Ids.
Dans cette commande nous avons trois régulateurs de type
PI (proportionnel intégral) et un bloc d'estimation du flux rotorique
à partir de Ids [16].
II-3-5. Dimensionnement des régulateurs
a) Régulateur de courant
Les équations de découplage proposées
permettent d'exprimer les résultats suivants :
T.p)
s
ds + ó
R . (1 .
s
T.p)
s
qs + ó
R . (1 .
s
Nous présentons les retards du convertisseur statique
(onduleur MLI) et les blocs de conversion par la fonction de transfert suivante
[6,16,17]
F(p)
(II-11)
1
+
Tf.p1
Pour chacune des boucles de courant, nous avons adopté un
régulateur
|
? 1
PI k 1
? j
? + j d, q
?
?? ?? =
? ? p.T
? j ?
|
?
?
? ?
|
Le schéma incluant les différentes fonctions de
transfert, pour l'axe q est :
*
+ -
I
qs
Kq(1+1/Tq.p
Vqs *
(1/(Tf.p+ 1)
(1/Rs)/(ó Ts.p+1)
I
qs
Fig II-6. Boucle de régulation du courant
Iqs
La fonction de transfert en boucle ouverte s'écrit
maintenant comme suit :

1
1 +
1
1
T .p
q
.
FTBO=
.
(II-12)
ó
K
q
1 +
1 +
R
s
T .p
s
T .p
f
T .p
q

Pour déterminer les paramètres du régulateur
PI, on fait appel à la méthode du pole dominant :
T q = ó T s ; D'où:
K
FTBO = .
q
R s
(II-13)
1
ó s + f
T (1 T .p)
La fonction de transfert en boucle fermée devient :

. = 2
0
ù (II-14)
K
p
1
2
1
2 + +
2 p
2T f
q
p + 2 î . ù + ù 2
0 0
.Tf
R .T
s s
ó
K q
FTBF
s
ó
R . T.
.T f
s


1 s s q
R . ó .T ; ù 0 = K
Avec : î=
2 K .T R . T .T
ó
q f s s f

Lors d'un échelon de consigne pour un amortissement
î=1/ 2
Cr
-
K R ó
ó .T .L
=
s s
qs 2 .T
=
2 .T f f
Tq=ó.Ts , Tf=2ms
b) Régulateur de vitesse
Le schéma de régulation en cascade
nécessite, pour un bon fonctionnement, que la boucle interne courant
soit plus rapide que la boucle externe.
La chaîne de régulation de la vitesse peut
être représentée par le schéma fonctionnel suivant :
Fig. II-7
Ùr


Ùref
-
Gfi


1
I qs *
)
T.p
v
K (1
v +
Kt
Ce
Fig II-7. Boucle de régulation de la
vitesse
3M
Ö * r
K = p .
r
t L
2
L a fonction de transfert en boucle ouverte est donnée par
la relation :
|
FTBO
|
K.
v
|
1 T .p
+ v
|
|
1
|
|
K t
|
, avec Gfi = 0 (II-15)
|
|
T.p
v
|
.
|
f
|
.
|
1 T .p
+ m
|
En appliquant la méthode du pole dominant, on aura :
T v = Tm = J/f;
|
FTBO v t
K .K
= .
f
|
1
|
(II-16)
|
|
T .p
m
|
En boucle fermée, on aura :
|
FTBF
|
1+
|
1 Tm
|
.p
|
(II-17)
|
|
KK/ f
v t
|
|
|
On prend généralement : Tr = 50.
ô = 3. Tm .
|
f
|
|
|
K v .K
|
t
|

j
3.
=
K
D'où
(II-18)
t
v 50 . .K
ô
Ör


c) Régulation du flux rotorique
Le schéma bloc de la régulation du flux rotorique
est représenté par la figure II-8. La boucle interne de courant
Ids est négligée.

Ör *
-
KÖ(1+1/pTÔ)
M/(1+pTr)
Fig II-8. Boucle de régulation du flux
rotorique
En appliquant la méthode du pôle dominant, on
aura
L
T Ö = T = d'ou
r
rR
M
G0 K .
= Ö(II-19) pTÖ
r
En boucle fermée, on aura
|
Gf Ö
|
=
|
1+
|
p
|
1
TÖ
|
(II-20)
|
|
|
K M
Ö
|
|

On prend
KÖ = 3 T Ö M.t r Ö
(II-21)
II-4. Simulation
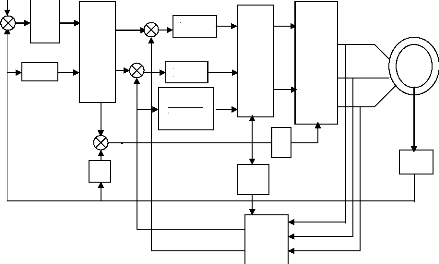
II-4-1. Schéma de simulation de la commande
indirecte alimentée en tension Le schéma bloc de
simulation est représenté par la figure (II-9)
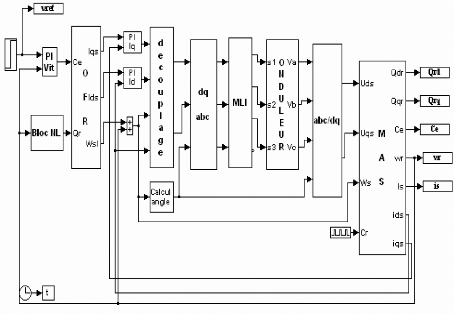
Fig II-9. Schéma de simulation de la
commande vectorielle d'une MAS associée à un
Onduleur de
tension
II-4-2. Résultats et interprétation des
résultats de simulations
Les résultats de la figure II-10 montrent clairement que
l'orientation du flux rotorique est maintenue après l'application de la
charge ( *
Ö dr = Ö r ; Ö qr = 0).
Le couple Ce suit le courant Iqs, et le
flux Ö r suit le courant Ids.
Le courant statorique, au démarrage fait appel à un
courant important, il augmente proportionnellement à la charge.
Le découplage flux-couple est maintenu quelque soit la
variation de la charge.
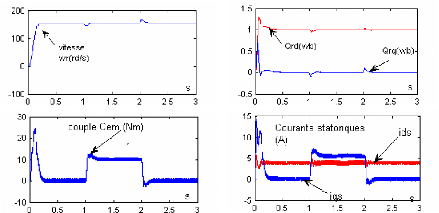
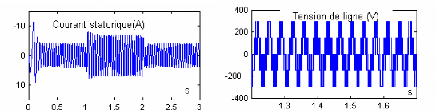
Fig II-10. Résultats de simulation de la
commande vectorielle indirecte d'une MAS
associée à un
onduleur de tension à MLI avec charge
II-5. Conclusion
Ce chapitre nous a permis de présenter la commande
vectorielle de la machine asynchrone alimentée en tension par
orientation du flux rotorique
Les schémas de commande montrent l'utilisation des
boucles de courant qui permettent de prendre en compte la dynamique du stator,
cependant la réalisation de cette structure est très complexe.
Nous constatons à travers cette commande que les
performances dépendent des correcteurs qui sont dimensionnés
à base du principe du pôle dominant. Les résultats sont
satisfaisants tant que le système est invariant.
Cette technique de commande suppose que la connaissance de la
position du flux est exacte. Dans le chapitre suivant nous ferons appel
à la commande non linéaire qui fait abstraction à la
position du flux.
CHAPITRE III
COMMANDE NON LINEAIRE DE LA
MACHINE ASYNCHRONE
CHAPITRE III: COMMANDE NON LINEAIRE DE LA
MACHINE ASYNCHRONE
III-1. Introduction
Dans ce chapitre nous présentons quelques rappels sur
la linéarisation pour des systèmes non linéaires. Ce
principe permet le développement d'une commande non linéaire pour
le contrôle du couple et du flux en tenant compte d'une limitation de
courant. Il permet entre autre de découpler parfaitement le flux et le
couple de la machine.
Cette méthode à été
développée par Fliess (1982) [18] et elle est
présentée dans sa forme actuelle en temps continu dans Isodori
(1989) [19].
Nous rappellerons les techniques de commande non linéaire
qui font recours à la géométrie différentielle pour
linéariser le comportement entrée/sortie d'un système non
linéaire.
Nous présentons les lois de commande non linéaire
relative aux systèmes mono variables SISO (Single Input Single
Output) et multi-variables MIMO (Multi Input Multi Output).
Enfin, nous appliquerons ces techniques à la commande
de la machine asynchrone alimentée en tension, et on termine notre
chapitre par des simulations qui illustrent le comportement de la commande non
linéaire.
III-2. Système mono entrée mono sortie
(S.I.S.O) Considérons le modèle non linéaire de
la forme suivante :
& = +
( ? ) = x f (x) g(x) .u
(III-1)
y h(x)
=
Ou n
x ? Ret f(x), g(x), h(x) sont des fonctions dérivables.
Le but de l'application de la méthode de
linéarisation est de trouver une commande de type retour d'état
non linéaire.
u = á(x) + â (x).v (III-2)
Qui en boucle fermée ramène le système
(Ó) non linéaire à un système linéaire (Fig
III-1) par rapport à une linéarisation autour d'un point de
fonctionnement, ceci permet d'obtenir un comportement linéaire du
système sur toute « la plage de fonctionnement » [20,
21,22].
Deux cas peuvent se présenter :
É Le degré relatif (i.e. le nombre de fois qu'il
faut dériver la sortie y pour faire apparaître l'entrée u)
est égal à l'ordre n du système.Le système peut
donc être linéarisé exactement.
É Le degré relatif est strictement inférieur
à l'ordre du système, le système est partiellement
découplé.
Pour définir les conditions de linéarisation on
doit d'abord définir les notions de dérivée de Lie et de
crochet de Lie.
- Dérivée de Lie
La dérivée de Lie d'une fonction h(x) le long d'un
champ de vecteurs
f(x) = (f1(x),f2(x),f3(x), ,f
n (x) t est donnée par :
|
n ? h
L h(x) i
f ?= ?
= f
i 1 i
x
|
(
|
x)
|
(III-3)
|
|
- Crochet de Lie
Le crochet de Lie de f(x) et de g(x) est le champ de vecteur
défini par :
n n
? g(x) ? f (x)
[ ]
f, g = ? = ? =
f (x) - g (x) L g (x) L f(x)
i f g
= -
1
x i 1 i
? x
i 1 i
?
|
(III-4)
|
Afin de définir la loi de commande non linéaire
nous calculons le degré relatif de la sortie :
? h ? h
y= x = ?x? x
[f(x) g(x)u]
+
& & (III-5)
L'équation devient :
& y = L f h(x) + L g h (x)u (III-6)
Si L g h(x) ? 0 n
? x ? R , on montre aisément que la commande :
|
1
u =
L h
g
|
(
|
x)
|
( L h(x) v)
- +
f
|
(III-7)
|
Conduit au système linéaire représentant un
simple intégrateur
& y=v (III-8)
Si Lgh(x) = 0, on continue la dérivation pour
obtenir
y L h(x) L L i 1 h(x) .u
i = + i=1,2,... (III-9)
i -
f g f
Avec L L i 1 h(x) 0
g f ?
- . La méthode consiste donc à déterminer
le degré de dérivation ä
à partir duquel le coefficient multiplicateur de la
commande `u' (L L i 1 h(x))
- n'est pas nul.
g f
ä : est le degré relatif de h(x).On montre que pour y
L h(x) L L 1 h(x) .u
ä = ä + ä - (III-10)
f g f
La commande
|
1
u 1
=
L L h(
ä?
g f
|
x)
|
( L h(x) v)
- ä +
f
|
(III-11)
|
Conduit au système linéaire équivalent
à une chaîne de ä intégrateurs :
y = v
ä (III-12)
Le schéma synoptique pour les différentes
étapes de calcul est le suivant :
?.... ?
v
y

x)
u
â(
?
+
á(x)
v
y
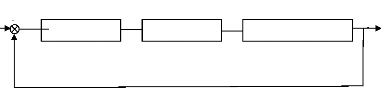
Fig III-1. Linéarisation
entrée-sortie
III-3. Système multi-entrées multi-sorties
(MIMO)
On considère maintenant un système avec p
entrées et p sorties (Fig III-2) :
p
|
x f(x) g
& = + ? i
i 1
=
|
(x
|
)u
|
i
|
(III-13)
|
|
y h (
1 1
=
|
x), ,y p
|
h (
p
|
x)
|
? R
x R ; u i , y i
? n
En appliquant la même démarche que pour les
systèmes mono-entrée mono-sortie, chaque sortie yj est
dérivée äj fois jusqu'à ce qu'au moins une
dérivée j
L gi L ä f - h soit différente de
zéro
j 1
pour tout n
x? R
ChapitreIII Commande non linéaire de la
machine Asynchrone
Y1
?P
Up
Yp
v1
Y1
â p (
x )
?P
vp
Yp
á p (
x)
x
? ?
Y1
v1
? ?
vp
Yp
U1
Fig III-2. Linéarisation pour des
systèmes MIMO
|
p
y ä = ä +
j L h ?
j
j f j
i 1
=
|
( ) i
L L h .u
ä -
j 1
gi f j
|
(III-14)
|
On obtient une (pxp) matrice D(x) dite de découplage [23,
24,25]
- 1
1
L L h
g1 f 1
ä
h p
...
- ä -
1 1
L L p
gp F
?
?
D(x) = ? M
? ä
?
?
?
?
?
? ?
? L L
p g1 f
h p
1
- 1
...
ä
L L
gp f
(III-15)
Le système devient ensuite :
ä ä
1 ? ?
y L h
1 ? ? u ?
1 f 1 1
? ? ? ? ?
M M M
? = ? ? + D(x) (III-16)
? ?
ä ä
p ? ? ?
L h
y
p ? ?
p ? ? ? ? f p ? ? ? u p ?
Si D(x) est non singulière, le retour d'état
statique qui linéarise le système est donné par :

? ? ? ? ? ?
(III-17)
? ? ?
? ?
1
?ä
?L h ? u
f 1 ? ? ?
) ? ? M M
? + ?
?ä ? p ?
?
? 1 ?
L h ?
? ? ? f p ? ? ? u
p
u ?
1 ?
M =D(x
- 1
?
u ?
p ?
? ? ?
?
?
Le système en boucle fermée est équivalent
à p chaîne de äj intégrateurs en parallèles
:
ä
y 1 ? ? v ?
1 1
? ? ?
M M (III-18)
? = ? ?
ä p ?
y ? ?
p ? ? ? v p ?
Nous obtenons donc un système découplé et
linéaire :
V1
Y1
?... ?
äj
M M
ä
p
Yp
V2
?... ?
Fig III-3. Système découplé et
linéarisé
Ces différentes étapes de calcul sont
représentées par la figure III-2
III-4. Commande non linéaire de la machine
asynchrone alimentée en tension III-4-1. Représentation
d'état non linéaire
Le modèle de la machine asynchrone exprimé dans le
référentiel lié au stator sous la forme d'état
s'écrit :
& X = F(X) + G.U (III-19)
Avec
|
X (x
=
|
T
s s r r
á â á â
1 2 3 4 5
, x , x , x , x ) (i , i , , , )
= Ö Ö Ù
|
T
|
|
F(x) =
|
(f (x), f (x) , f (x), f (x) , f (x))
1 2 3 4 5
|
T
|
T
? g 0 0 0 0 ?
1
G ??
=
? ? 0 g 0 0 0
2

U = (U s á U s â ) ; g 1 = g 2 = 1 ó .L S
k
f (x) = -ë .x + +
.x p.k.x .x
1 1 3 4 5
T r
k
f (x) = -ë .x + +
.x p.k.x .x
2 2 4 3 5
T r
M 1
f (x) = - +
.x .x p.x .x
3 1 3 4 3
T T
r r
M 1
f (x) = + -
.x p.x .x .x
4 2 3 5 4
T T
rr
r
M f 1
= - - -
r
f (x) p. (x .x x .x ) .x .C
5 2 3 1 4 5
J J
JL .
r
III-4-2. Choix des sorties
Le choix des sorties est lié aux objectifs de la
commande. On désire commander le couple et assurer le contrôle du
flux rotorique afin d'éviter la saturation magnétique et de
pouvoir travailler en régime de survitesse ou la limitation de la norme
de la tension impose de baisser la norme du flux.Les sorties sont le couple et
le flux rotorique :

? M
? h (x) ? p
1 ?
Y(x) = r
?? h (x) ?? = L
?
2 ? ?
) ?
?
?
??
2
2
+ x
4
x 3
( x x x x
2 3 1 4
-
(III-20)
III-4-3. Linéarisation entrée-sortie
La condition permettant de vérifier si le système
non linéaire admet une linéarisation E/S est la
détermination du degré relatif.
a) Degré relatif à la sortie Y1 (x)
Y (x) h (x) L .h (x) L h (x) .u
& 1 = & 1 = f 1 + g 1 (III-21)
Le degré relatif associé à Y1
(x) est r1=1
b) Degré relatif à la sortie Y2 (x)
& &

(
x)
(
Y 2
x) h (
= 2
x) L
= f
.h 2
& & &&
(
(III-22)
+
(
) .u
x)
(x
x)
h 2
x) h
= 2
Y (
2
.L f
.h 2
L 2
f
L g
Le degré relatif associé à Y2 (x)
est r2=2
Avec :
|
L h
f 1
|
(
|
x) p
= -
|
M
Lr
|
?
??
|
(
|
1
+
Tr
|
ë
|
)(
|
x2
|
x3
|
-
|
x1
|
x ) p
4 r
+ Ù
|
(x1
|
x x x ) pk
3 2 4
+ + Ù
|
r 3
(x 2
|
+ x 2
4
|
?
) ??
|

x
1
)(
(
2
Tr
L h
f 2
x)
2
x
3
)(
2
T
2k M
+
2
T
+
2
2
T
T
r
r
r
r
+
x )
4
2
2M
2
T
)
2
+x
2
2
T
[ M(x x x x ) (x x )]
2
1 3 2 4 3
+ - +
2
4
L2
f
h(
2
2
+x
4
6M
x
3
4
2MP
Ù
r
(x
2
x
3
x
1
(x
1
2
x) (
=
2k M
) (
-
+ +
x x )
24
|
r
Lgh1(x) =[-pkx4
pkx3]
L L h (x) = 2R kx 2R kx
g f 2 [ r 3 r 4 ]
|
r
|
Le choix de ces sorties aboutit à une linéarisation
partielle d'ordre 3 (r1+r2 p n=5) et une dynamique interne d'ordre
2. (n : ordre du système)
III-4-4. Transformation difféomorphisme
Avec un changement de coordonnées d'ordre rj - 1 et une
transformation z = T(x) [24,26,27], on aura :

h2
(
x)
z
2
z L h
3 f 2
=
x)
(
z arctg (x / x )
4 3 4
=
z x
5 5
=
(III-23)
z4 et z5 peuvent êtres choisis
arbitrairement [24, 26]
Dans le nouveau système de coordonnées, le
modèle (III-23) s'exprime de la façon suivante :
& z 1 =Lfh1(x)+Lgh1(
& z 1 =Lfh1(x)+Lgh1( x)
x)
z & 2 = z 3 (a)
(x ) .u
z L h 2 (x) L g L f h 2
& 3 = f +
2

z
R r
+
z p.z
4 5
=
p
( )
z z
1 2
(b) (III-24)
1 f
( ) 5
=
r
5 2 r
z C z
- -
J J
III-4-5. Loi de commande non linéaire
Pour avoir une linéarisation partielle E/S d'ordre trois
en boucle fermée, il faut appliquer le retour d'état non
linéaire.
x) [ ( v v ) t A(x)]
- (III-25)
1 2

L L h
g f 2
1
x3
? ? ?
x)
-
1
1
-
(
x)
?
?
= ? ? ? ?
r (III-26)
x4
? ? ? ? ? ?
? ? ?
1
2Rk
1
2
r
Ö
(
L h
g 1
pk
1
pk
2R k
r
x4
x3
u D (
= - 1
D (x)
- 1 =
(III-28)
La matrice D-1(x) existe si Ö r ? 0
?
??
A(
x)
|
L h (
2
f 2
f 1 (III-27)
|
x)
|
x)
?
??
L h (
Les composantes du vecteur d'état non linéaire sont
définies comme suit :
h
(
2
?
?
??
2
-
x
4
?
?
? ?
x
3
x
4
?
?
?
?
?
? ?
x)
1
=
?
?
? ?
U
k
Ö
x
3
1
-
2
L
f
p
L 2
f
h (
1
x)
r
v
v
2R
r
s â
?
?
??
U
s á
V1
Lfh1 (x)
u
sá
u
sâ
Is, Ör, X5
D(x)-1
V2
Lfh2(x)
En supposant la matrice de découplage D(x) inversible
:
L'application de la loi (III-28) au système
d'équation (III-24) aboutit au modèle linéarisé
(III-29) schématisé par la figure III-5.
|
&
z v
1 1
=
&
z z
2 3
=
&
z v
3 2
=
|
(III-29)
|
|
&
v1 = z
|
|
|
|
|
z1 = Ce
|
|
|
1
|
|
1
s
|
|
|
|
|
|
|
&
3
v2 = z
2
r
z2 = Ö
&
z3 = z2
1
s
1
s
Fig III-5. Système découplé et
linéarisé
Le système (III-24b) est inobservable, donc il faut
montrer que la dynamique des zéros est stable. Pour éviter la
singularité, on choisit z2 ? 0.
La dynamique des zéros devient
&
1
f r
&
= -
z5
J
? + ?
? C z ?
r 5
? J ?
(III-30)
( )
z z
1 ref 1
-
( 2ref 2 ) 22 ( 2ref 2 ) 2ref
z z k z z z
- + - +
& & & &
v 1 k11
v 2
k21
+ z & 1ref
(III-31)
z4 : représente l'angle du flux rotorique
compris entre zéros et 2 ð
d
s =
dt
z5 : est une dynamique du premier ordre
1
z 5 C
f J
+ s
=
Avec une entrée C r physiquement bornée,
z5 reste bornée.
La dynamique est stable (pôle = - f )
J
III-4-6. Commande par imposition des pôles
Pour poursuivre des trajectoires de référence de
couple z1 ref et de flux z2ref, les entrées v1, v2
peuvent être calculées de la façon suivante [24,26,27].
Les équations d'erreur de poursuite deviennent :

e
= -
z
1ref
z
1
1
=
(III-32)
e
-
2
z
2ref
z
2
e k e k
& & &
2 22 2 21
+ +
e 0
=
2
(III-33)
Où les constantes k11, k21, k22 sont choisis tel que
k11 + Set 2
k 21 + k 22 S + Ssont des
polynômes d'Hurwitz.
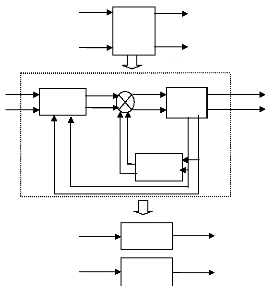
III-4-7. Structure de la commande non linéaire en
vitesse
Nous utilisons un correcteur IP ou PI avec anti-windup, afin de
compenser les variations du couple et le contrôle de la vitesse.
=
1ref s
( Ù ref - Ù )- p Ù
k
(III-34)
z
k i
Les coefficients ki, kp sont choisis par un placement
des pôles.
Les équations (III-19), (III-27) et (III-31) sont mises
sous forme de schéma fonctionnel Fig. III-6
?r
Ce
?ref
-
Kp
ki s
-
-
Ö2 r
d
d
K21
-
K11
K21
V1
V2
Lfh1(x)
L2fh2(x)
-
D-1 (x)
CNL
Vâs
Vás
MAS
Fig. III-6. Schéma bloc de la commande non
linéaire de la machine
asynchrone alimentée en
tension
III-5. Simulation
Nous avons établi une commande de linéarisation E/S
par retour d'état non linéaire pour une machine asynchrone
alimentée en tension conformément en schéma bloc suivant
:

Fig III-7. Schéma bloc de simulation de la
commande non linéaire de la machine
Asynchrone alimentée en
tension
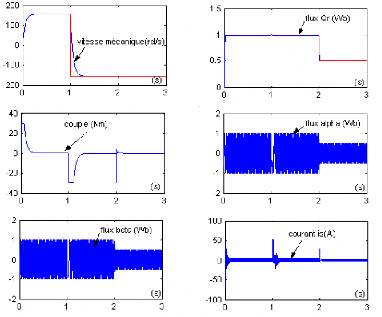
Fig III-8. Réponses aux échelons de
vitesse #177; 156rd/s avec variation du flux de1Wb
à
0.5 Wb de la commande non linéaire de la machine asynchrone
alimenté en tension
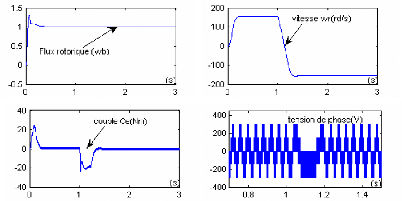
Fig III-9. Réponses aux échelons de
vitesse #177; 156rd/s de la commande non
linéaire de la
machine asynchrone alimentée en tension avec
convertisseur
III-6. Interprétation des résultats de
simulation
Les résultats de simulation (Fig.III-8 et Fig.III-9)
montrent de bonnes performances pour le flux et du couple (vitesse). Il n'y a
aucune interaction entre les deux axes, ce qui prouve le découplage
dynamique entre les deux variables.
Pour le mode normal, nous remarquons une réponse en
vitesse sans dépassement et sans erreur statique. La réponse en
vitesse et le rejet de perturbation sont contrôlés par un
régulateur IP en cascade avec un régulateur P pour le couple. La
réponse en vitesse est satisfaisante. Le flux est contrôlé
par régulateur classique PD et suit sa consigne avec une constante de
temps faible.
III-7. Conclusion
Dans ce chapitre, nous avons présenté la commande
non linéaire appliquée à la machine asynchrone
alimentée en tension associée à un convertisseur
statique.
Le changement de coordonnées non linéaires et une
contre réaction NL ont permis de ramener le comportement non
linéaire du système à un sous système
linéaire.
Le rejet de perturbations et le découplage (du flux et du
couple) sont acceptables.
Cependant le couple présente une fonction NL
dépendant du courant Iqs et du flux ce qui présente un
inconvénient pour cette technique de commande et lui exige à
travailler de zéro à vitesse nominale. Pour contourner ce
problème on fait appel à la commande NL qui peut découpler
complètement et permet à la machine de fonctionner pour n >
nn.
Ainsi, le chapitre suivant sera consacré à cette
technique de commande NL basée sur la linéarisation
entrée-sortie.
CHAPITRE IV
DECOUPLAGE NON LINEAIRE AVEC
ORIENTATION DU FLUX
CHAPITRE IV: DECOUPLAGE NON LINEAIRE
AVEC ORIENTATION DU FLUX
IV-1. Introduction
De nos jours les moteurs asynchrones sont de plus en plus
utilisés dans la conduite de processus qui nécessite des
variations de vitesse et de position.
L'application des techniques de l'automatique moderne dans la
commande des machines électriques permet d'obtenir de très hautes
performances.
Actuellement, les recherches dans ce domaine, s'orientent de plus
en plus vers l'application de ces techniques lors de la commande des
machines.
Dans ce chapitre nous nous intéressons à
l'application du réglage par retour d'état linéarisant
(Feedback Linearization) à un actionneur asynchrone.
Cette technique nous permet de linéariser et de
découpler le système par l'utilisation de l'outil
géométrie différentielle. Par la suite la commande par
placement de pôle est appliquée au système. Enfin la
structure de la commande est testée par simulation sur le modèle
du moteur ainsi linéarisé.
IV-2. Linéarisation exacte par retour
d'état
Considérons la classe de système dynamique non
linéaire de la forme :
m
i
x f(x) ?
& = + g i (x) .u
i 1
=
y1=h1(x) (IV-1)

y m = hm ( x)
Où n
x? R, f(x),g1(x),..,g m (x) et
h1(x),..,hm(x) sont des fonctions vectorielles
différentiables de dimensions appropriées dans un
ouvert de Rn.
Le problème est alors de trouver une transformation de
coordonnées et un retour d'état non linéaire qui
linéarisent le système [20,2 1,22].
Considérons donc un retour d'état non
linéaire statique de la forme :
u = á(x) + â(x).v (IV-2)
Ou â(x) = [ â ij (x)] pour i=1,..., m et
j=1,..., m est non singulière
Et [ ]T
á (x) = á 1 (x ),..., á
m (x) .
La linéarisation exacte du système (IV-1) avec des
sorties hi(x) consiste alors à trouver ce retour d'état non
linéaire (IV-2) et la transformation de coordonnées :
Z = Ö (x) = [Ö1(x)... Ö n
(x)] qui mettent le système en boucle fermée sous la forme
canonique de BRUNOWSKY. z Az Bv
& = +
y Cz (IV-3)
où: V est le nouveau vecteur de commande.
1
0
=
0
0
0 ?
??
Avec: A = dia (A), B = dia (B) et C = dia(C) pour i = 1,..., m ;
avec :
? 0 1 0 . 0 ? ? 0 ?
? 0 0 1 . 0 ? ? ?
(IV-4)
0
? ? ? ?
A i i i
= ? ? ; B = ? . ? ; C
? ? ? ?
0 . . . 1 .
? ? ? ?
? ? ? ? ?
? 0 . . . 0 ? ? 1
En relation avec les équations d'état (IV-1) on
définit le vecteur degré relatif{r1 ,..., r m } . Nous
dirons alors que le système donné par (IV-1) possède un
vecteur degré relatif {r1 ,...,rm } en un point
x0 si et seulement si :
a) Le produit : L L h i (x) 0
gj f = (IV-5)
k
Pour 1 = i = m ,1 = j = m, et pour tout k p r1 -1.
Lfh(x) est la dérivée de Lie de la fonction h(x)
suivant le champ de vecteur f.
b) La matrice de découplage [23,24,25] :
r
A(x) L gi L f h (x) ??
= - (IV-6)
? j 1 ?
j
?? ( i ,j )
Pour 1 = i = m et 1 = j= m est non singulière au
pointx0.
Le système est alors exactement linéarisable si et
seulement si r1 + ... + rm = n c'est à dire
après difféomorphisme et bouclage le système
sera constitué de m sous système linéaire et
découplé.
IV-3 Modèle de la machine
Le comportement dynamique de la machine asynchrone
alimenté en tension est décrit par un système
d'équations non linéaires, multivariables et fortement
couplées.
.
x 3
Rr
Lr
Le modèle de la machine dans le référentiel
d-q choisi de tel manière que le flux rotorique possède une
composante nulle selon l'axe q est donné par les équations
d'états suivantes :
X & = F(X) + G.U (IV-7)
sl T x
T Ö
R r r4
Avec : [ ]T
g 1 (x) = 1 ó .L s 0 0 0 , [ ]T
g 2 (x) = 0 1 ó.Ls 0 0


F(x) f (x) f (x) f (x) f (x) x x x x
= =
[ ] [ ]T
T
1 2 3 4 1 2 3 4
U=(U s á U s â ) T
+
+
Rs
Ls
ó .
Rr
.L s
ó
x 3
M x
R .
r x + +
3 r 2
R x
L r
x 1
x 2
x 3
.
R r
x 4
x 3
x 4
.u ds
+
ó
x (
& = -
1
ó
x -
2
ó .L ó .
s
.L s
L 2
r
M
Rs
x (
& = -
2
.L S
1
).
M
L r
2
M
L 2
r
2
M
L 2
r
).
x1
+
ó
L s
+ x 1
x 4
.u qs
+
ó .
(IV-8)
1
.L s
1
M
LL
S r
R r
Cr

J
x1
M.
Rr
Lr
.
x2
x3
J
Lr
1
M

&
x3
&
x4
-
-
Le couple électromagnétique développé
par la machine est donné par : M
C = Ö (IV-9)
elm I
dr qs
r
L
· Choix des sorties : on choisis
comme sortie x3(composante du flux rotorique selon l'axe d) et x4 (la
vitesse).En pose :

1
2
h
h
(
(
Rr
r (IV-10)
r
-
J
= ? 1
?
? ? J
? R r
? L r
Lr
M
Mx
x2
1
x3
? ? ? ?
? ?
L
x3
C
Y(
x)
?
??
?
??
x)
x)
·

.
x)
(
(
x) h
=
1
L
f
Y
1
(IV-11)
& & & &
x)
x ).u
h
1
+
(
Y
1
x) h
=
1
2
L h (
f 1
Lh(
f1
L
g
(
(
x)
x)
Linéarisation entrée-sortie :
la condition permettant de vérifier si le système non
linéaire admet une E/S est la détermination du degré
relatif.
a) Degré relatif à la sortie Y1 (x)
& &
Le degré relatif associé à Y1 (x)
est r1=2 b) Degré relatif à la sortie Y2 (x)
& &

(
x)
x)
(
Y (
2
x) h
= 2
& & & &
(
(IV-12)
Lf
.h 2
+
).u
(
x)
(x
x)
h2
x) h
= 2
Y (
2
.h 2
L 2
f
.Lf
Lg
Le degré relatif associé à Y2 (x)
est r2=2
Delà, on a vérifié que le vecteur
degré relatif est (2,2), ce qui permet d'affirmer que le système
décrit par diffeomorphisme et bouclage est complètement
linéarisable.
IV-4. Application de la commande linéarisante au
moteur
Le changement de coordonnées non linéaire
nécessaire est donné par le système d'équations
suivant [26,27]:
|
z
1
|
h (
1
|
x)
|
=
|
x
3
|
|
z
2
|
L
f
|
h (
1
|
x)
|
f (
3
|
x)
|
(IV-13)
|
z
3
|
h(
2
|
x)
|
=
|
x
4
|
|
z
4
|
L
f
|
h(
2
|
x)
|
f (
4
|
x)
|
Et la matrice de découplage par :
? MR ?
r
? 0 ?
óLL
? ?
s r
D(x) = (IV-14)
? Mx?
? 3
0 ?
? J L L
ó ?
? s r?
L'application du changement de variables (IV-9) au système
d'équations (IV-7) aboutit à l'écriture suivante :
&
z z
1 2
=
|
z L h
2
& 2 f
= 1
&
|
(
|
x)
|
+= L L h (x)u v g f 1 1 1
|
(IV-15)
|
z z
3 4
=
+= L L h (x)u g f 2 2
v2
&
x)
(
z
4
h2
L 2
f
La commande linéarisante est finalement donnée par
:
u D (x) [ ( v v ) t A(x)]
= - 1 - (IV-16)
1 2
? L h (x)?
1 1
u D (x)
- + -
? f
= - 1 ? D (x) .v (IV-17)
2
?? L h (x) ?
f 2 ?
?
?
??
A(
x)
(
x)
?
?
??
L2h
L2
x)
h(
2
f 1 (IV-18)
f
(IV-19)
Avec :

(
Rr
x)
Lh
2
f 1
Lr
( )
Mf ( x ) f ( x )
1 2
-
(
x)
Lh
2
f 2
M

( x f ( x ) x f ( x ) )
JL
3 2 2 3
+
r
- Calcul des trajectoires de
référence :
Les entrées v1, v2 peuvent être calculées de
la façon suivante [24,26,27].
|
v
|
1
|
k
11
|
( ) ( )
z z k z z
- + -
& &
1ref 1 12 1 ref
|
+ z & &
1ref
|
|
v k z z k z z z
2 21 ( 3 ref 2 ) 22 ( 3 ref
3 ) 3 ref
= - + - +
& & &&
Les équations d'erreur de poursuite deviennent :
|
(IV-20)
|
e k e k
& & &
+ +
1 11 1 12
e 0
=
1
, e k e k
& & &
+ +
2 22 2 21
e 0
=
2
IV-5 Simulation
Le schéma bloc de simulation sous Matlab/Simulink est
illustré par la figure IV-1
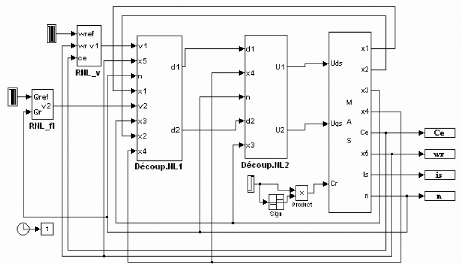
Fig IV-1. Schéma bloc de simulation de la
commande non linéaire avec orientation du
flux de la MAS
alimentée en tension
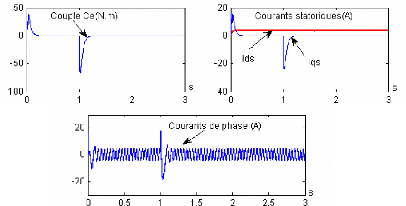
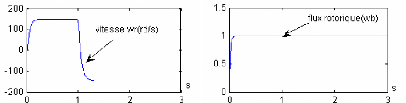
Fig IV-2. Réponses aux échelons de
vitesse #177; 156rd/s de la commande non
linéaire
de la machine asynchrone alimentée en
tension
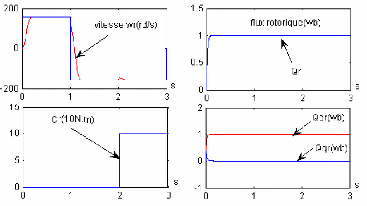
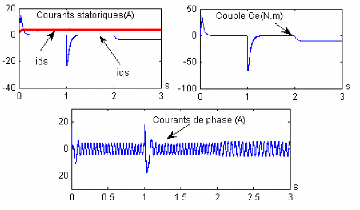
Fig IV-3 Réponse aux échelons de
vitesse#177; 156rd/s de la commande non
linéaire
de la MAS avec application d'une
charge
IV-6. Interprétation
Les résultats de simulation fig.IV-2 et fig.IV-3,
montrent de bonnes performances pour le flux et le couple (vitesse). Il n'y a
aucune interaction entre les deux axes, ce qui prouve le découplage
dynamique total entre les deux variables.
D'autre part, le flux Ö r est orienté
dans la direction `d' ( Ö dr= Ö r ; Ö qr = 0).
Les réponses en vitesse sont sans erreur statique, sans
dépassement et avec un rejet de perturbation très rapide
IV-7. Conclusion
Dans ce chapitre, nous avons présenté la commande
non linéaire appliquée à la machine asynchrone
alimentée en tension avec orientation du flux.
Le changement de coordonnées non linéaires et une
contre réaction NL ont permis de ramener le comportement non
linéaire du système à un sous système
linéaire.
Le rejet de perturbations et le découplage (du flux et du
couple) sont acceptables.
Le flux jusqu'ici est supposé mesurable or dans la
réalité, il est difficilement accessible.
Généralement on fait appel aux observateurs ou estimateur de
flux. Ainsi, le chapitre
suivant sera consacré aux observateurs à mode
glissant.
CHAPITRE V
COMMANDE NON LINEAIRE AVEC OBSERVATEUR
DU FLUX PAR MODE GLISSANT ET ESTIMATEUR
DE VITESSE ROTORIQUE
CHAPITRE V: COMMANDE NON LINEAIRE AVEC
OBSERVATEUR DU FLUX PAR MODE GLISSANT ET
ESTIMATEUR DE VITESSE ROTORIQUE
V-1. Introduction
Les observateurs non linéaires ne sont pas très
développés devant les observateurs linéaires.
Cependant, les chercheurs s'étaient
intéressés à développer des observateurs pour les
systèmes ayant une non linéarité régulière
ou quelques cas pratiques comme le système des flux rotorique et
statorique au sein de la machine asynchrone. Grâce aux
propriétés importantes des systèmes à structure
variable, les chercheurs ont pensé aux observateurs basés sur
l'approche du mode de glissement. Ces observateurs ont la même structure
avec les observateurs classiques.
Dans ce chapitre, il est présenté le concept
général de la commande non linéaire de la machine
asynchrone avec observateurs de flux rotorique et de vitesse. Dans ce contexte,
nous étudions un observateur non linéaire d'ordre réduit
avec terme correctif classique et un observateur non linéaire par mode
de glissement.
Ensuite, nous présentons quelques applications possibles
de ces observateurs pour la commande non linéaire de la machine
asynchrone.
V-2. Association Machine- Observateur en boucle
ouverte
La théorie des observateurs est beaucoup plus
développée pour les systèmes linéaires par rapport
aux systèmes non linéaires. Les observateurs non linéaires
n'ont pas une structure générale. Dans la littérature nous
trouvons plusieurs types d'observateurs non linéaires. Cependant, chacun
est le meilleur pour un système donné [28,29].
Dans cette section, nous nous intéressons à
l'étude des observateurs particuliers concernant l'observation du flux
rotorique.
V-3. Observateur non linéaire classique
V-3-1. Etude de l'observateur
Cet observateur concerne l'estimation du flux rotorique au sein
de la machine asynchrone. Considérant le système suivant
M? 1 ?
? - Ö + ù Ö ?
T dr sl qr ?
r ?


M ? 1 ?
= + - ù Ö - Ö
(V-1)
i ? ?
qr T
qs sl dr
? qr
T ?
r ? r ?
Ce système peut être écrit sous une forme
réduite comme suit :
Ö = + ? - + ù
1
r I J
M ? Ö
I ? sl r
? (V-2)
s
T r ? Tr ?
? 1 0? ? -
0 1 ? ? Ö ?
dr ? I ds ?
I , ??
= 0 1 J , ?
r , ?
?? ? ? = 1 0 Ö = I
?? ? = ?
? Ö s I
qr ? ? qs ?
Une première estimation du flux Ôr peut
être déduite de l'équation (V-2).

M
+
I
s
(V-3)
r
T
r
? 1 ?
? - - ù
I J ? Ö à
?sl
T ?
? r ?
à
Ö
Il est supposé que la pulsation ùsl et
le courant statorique Is sont des quantités connues
(mesurable).
L'erreur d'estimation du flux rotorique est donnée par
:
e=Öà- Ö (V-4)
r r
L'erreur est gouvernée par l'équation suivante
& = ? - - ù (V-5)
1
e sl ?
? I J .e
?
? T r ?
Pour une pulsation de glissement ùsl
donnée, le système (5.6) possède deux valeurs propres
Ø1,2 tel que:
Ø = -
1,2 j
1 #177; ù (V-6)
sl
T r
Les deux composantes du flux observé évoluent
suivant un mouvement oscillatoire amorti
avec une pseudo-pulsation ùsl et un taux
d'amortissement
1 [29,30].
Tr
En multipliant les deux membres de l'équation (V-5) par
t
2e et connaissant que :
2ete&= t (V-7)
d ( e e)
dt
Et etJ e = 0, il résulte :
2
t
d ( ) ( e e)
t = - &
e e
Tr
dt
(V-8)
Cette procédure représente réellement la
stabilité par la théorie de la fonction de Lyapunov
[30,31]
Cette méthode d'estimation est incapable d'annuler
l'erreur dans le cas ou les paramètres du modèle sont
imprécis. Le principe de reconstruction consiste donc à corriger
la dynamique en tenant compte de l'erreur entre la sortie mesurée et la
sortie estimée. De plus l'erreur converge rapidement à cause de
la boucle de retour.
La philosophie de l'observateur consiste à ajouter
à l'estimateur (V-3) un terme correctif dérivé de la
prédiction de l'erreur [30].
? 1 ?
à & M
Ö = - - ù
? I J Ö à + + -
? I K V Và (V-9)
s ( s s )
?
sl r
T ? T
? r ? r
Avec

M
V
L
r
s
M
ù
J Ö
L
r
s
r
& &
Ö + ó
L
r s
+ - óù +
( )
R I L J I
s s s s
I
s
(V-10)
|
à
V
s
|
M L
r
|
&
à
Ö + ó
L
s
|
&
I
s
|
( ) s r
M
+ - óù + ù Ö
R I L J I J à
s s s s L
r
|
Vs : représente le vecteur des tensions
mesurées ((Vds, Vqs) t),
à
Vs : représente le vecteur des tensions
observées,
K : représente le gain de l'observateur (matrice 2x2).
Après un calcul intermédiaire, le système
(V-5) devient dans ce cas de la forme suivante :
|
Avec
|
&
e
|
? 1 ? M
= - - ù (V-11)
? I J ? e - &
Ke
? T r ? L
? r ? r
|
M
ù = ù + K ù (V-12)
r sl L
s
r
L'erreur est gouvernée par :
- 1
? M? ? 1 ?
e I
& = +
? K ? ? - - ù
I J ? e (V-13)
? r
L ??T ?
? r ? ? r ?
Pour une valeur précise du gain K, l'erreur suit une
dynamique correspondante. Pour la simplification, nous supposons :
K=kI (V-14)
Avec k est un scalaire
Si la vitesse de glissement ùsl est constante,
le système (V-13) devient linéaire ayant les valeurs propres
suivantes :
- 1
? M ? ? 1 ?
Ø = +
1 k (V-15)
? ?
1 , 2 j
? ? - #177; ù
? L ? ? r
T ?
? r ? ? r ?
Nous constatons que nous pouvons agir sur la rapidité de
convergence de l'erreur en
|
agissant sur la constante
|
- 1
? + par le biais du gain d'observation « k »
M ?
? 1 k ?
? L r ?
|
Nous procédons comme précédemment pour
démontrer la stabilité de cet observateur, l'équation
(V-8) prendra la forme suivante :
? 1
= - ? + M
t t
d ( ) ( e e)
? ? &
e e 2 1 k
?L T
r ? r
- 1
dt
(V-16)
= ? + M ?
? I k ?
r ? L r ?
1
( s s )
z kL I
- ó
Ö à
-
(V-19)
M
La fonction de Lyapunov diminue suivant la constante de
temps ?
T 1 k . Il est
? + ?
r L
?
? r ?
possible de choisir le gain « k » de façon
à imposer cette constante de temps considérablement petite devant
Tr.
Afin d'éviter le calcul des dérivées dans
l'expression (V-10) qui amplifient les erreurs, Dote nous a proposé une
méthode basant sur un changement de variable [32]. La variable
auxiliaire « z »est définie par :
= ? + (V-17)
M ?
z I k Ö + ó ? ? à kL I
r s s
? L r ?
Tenant compte de l'équation (V-14), la
dérivée de « z » aura la forme suivante :
? M ? ? 1 ?
z & = - - óù
? I kR I kL J ? I + - ù
? I J à kV
Ö +
? (V-18)
? s s s s
? r r s
T ? T ?
? r ? ? r ?
Avec :
Par substitution de (V-19) dans (V-18), nous retrouvons le
système différentiel final pour le calcul du vecteur « z
» tel que :
? ?
1 ? ?
M
? + - + óù + - ù
( ) r o s s s
? 1 ?
& = - ù
z I J k z ?
? I k R I L J ? I J k kL I kV
? ?
+ ó + (V-20)
? r o s s s
T ? ? T ? T ? ?
? r ? ? r ? r ? ?
? ?
?
M ? ? 1
Avec k
I k
+
o L
r ?
Ce système peut être résolu pour n'importe
quelle condition initiale z (0) impose par le
|
à
choix de Ö r (0)
|
. L'estimation de r
Öà peut être déduite après le
calcul de « z » à l'aide de
|
l'équation (V-19) sans calcul des
dérivées.
Remarque
La dynamique de l'observateur doit être plus rapide que
celle du système à observer. Cela exige un bon choix du gain.
V-3-2. Simulations
L'observation du flux est établit en utilisant le bloc de
simulation suivant :
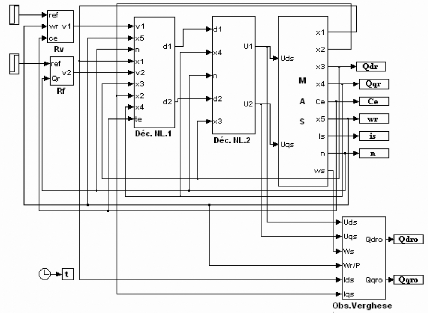
Fig V-1. Schéma de simulation de la commande
non linéaire de la MAS Avec observateur non linéaire classique
(Verghese) du flux rotorique
V-3-3. Résultats de simulation
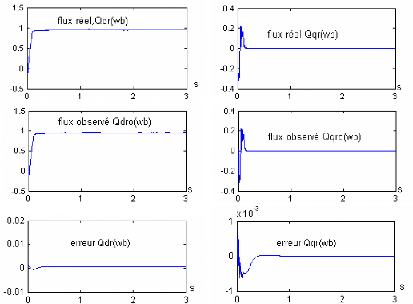
Fig V-2. l'évolution des flux réels et
observés et l'erreur d'observation
Nous avons simulé le comportement de l'observateur du
flux rotorique en utilisant le schéma de la figure V-1. La simulation
effectuée dans la figure V-2 montre l'évolution des flux
réels et des flux observés dans la machine. Nous remarquons que
les flux observés convergent rapidement vers les flux réels et ne
les quittent pas ultérieurement.
V-4. Observateur par mode de glissement
A cause des caractéristiques inhérentes aux
systèmes non linéaires, l'estimation de l'état de ces
systèmes continue à poser des problèmes difficiles. Dans
ce fait les chercheurs ont été orientés vers le
développement des observateurs d'état pour les systèmes
non linéaires et/ou incertains. L'observateur par mode de glissement
(Sliding Observer) est dérivé de la théorie des
systèmes à structure variable. En effet, cette dernière
s'adapte considérablement avec les systèmes non linéaires
et incertains. [28]
V-4-1 Structure générale d'un observateur par
mode glissant
Considérant le système non linéaire suivant
:
x & =f(x,u,t) (V-21)
Considérant aussi le vecteur y des variables mesurables
qui sont reliées linéairement avec les variables d'état
;
y = Cx (V-22)
Si le système est observable, l'objectif de l'observateur
est de donner la meilleure estimation des variables d'état à
partir des mesures sur la sortie y et l'entrée u.
Nous définissons l'observateur par la structure suivante
[33] :
xà = f(xà ,y,u,t)+Ëu s
& (V-23)
Avec :
xà est de même dimension que x(n)
à
f est le modèle d'estimation
Ë est la matrice des gains de dimension n x r (r est la
dimension de u) u s est un vecteur définit par
u= sign (s ) sign (s ) K sign (s )
[ ]t (V-24)
s 1 2 r
et
[ss s ] t S [ y C xà ]
2 K r = = - est une matrice carrée (r x r) à
déterminer.
Nous définissons aussi le vecteur d'erreur e = x
-xà en soustrayant les équations (V-23) et (V-21), ensuite nous
obtenons :
e&=Äf-Ëu s
Avec
Äf = f(x, u, t) - f(xà, y, u, t) (V-25)
Le vecteur surface S=0 est attractif, si :
&
S i S i < 0 pour i= 1, r (V-26)
Durant le mode de glissement, le terme de commutation (V-24)
est nul. Car le vecteur surface et sa dérivée sont nuls (S =
& S = 0). La grandeur équivalente du terme de commutation est
donnée comme suit :
C( Ä f - Ë s = (V-27)
i ) 0
D'ou
u ( C ) C f
~ 1
s = Ë - Ä (V-28)
La matrice C Ë doit être inversible. Cela constitue
la première exigence sur le choix de Ë et . La dynamique de
l'erreur est gouvernée par l'équation (V-29).
ds
&
i
1 1
= -ë + ù + Ö + ù Ö + v
ds ds s qs dr r qr
k
i i k
T ó L
r s
&
i
1 1
= -ù - ë - ù Ö + Ö +
i i k k v
qs s ds qs r dr qr qs
T ó L
r s
ë i
ds
-
ù
s
-
M
1
à
-
-
k k
+
T
ë i
qs
Ö
dr
ù
r
i
ds
r
i
qs
-
de l'erreur vers zéro.
V-4-2 Observateur par mode de glissement (MG) du flux
rotorique
L'objectif de l'observateur est d'estimer les flux rotoriques et
Ôdr et Ôqr et les courants statoriques
connaissant la mesure des courants et les tensions statoriques et la vitesse de
rotation. Le vecteur sortie utilisé pour l'estimation est donné
par :
|
?1
= = ?
y C x
? 0
|
0
1
|
0
0
|
0
0
|
0 ?
? x
0 ?
|
(V-30)
|
Considérant maintenant le système du moteur
asynchrone tenant compte des variables ids,
à à à à
iqs, Ôdr, Ôqr. Les variables à observer sont i
ds , i qs , Ö dr , Ö qr .
Nous donnons ainsi le modèle du
système à observer et le modèle
d'observation. Le système à observer est :
Ö& = M - Ö + ù Ö
1
dr T
i (V-31)
ds d r sl qr
T r r
1
1
Ë
1
+
ó
+
v
ds
u
s
L
s
1
2
Ë
1
+
ó
+
v
qs
u
s
L
s
Le modèle de l'observateur est :
Ö&
qr T
= M - ù Ö - Ö
1
i qs sl dr qr
T r r
à
i
ds
-
1
T
r
1
Ö + ù Ö
k
dr r
Ö
qr
qr
à
à
&
à
i
ds
&
à
i
qs
&
à
Ö
dr
Ö à &
qr
+ ù +
i k
s qs
T
r
M
T
r
T
r
ù
sl
à à
u
s
1
+ Ë
2
+ù
sl
Ö
dr
Ö
qr
2
à
à
1
-
u
s
+ Ë
2
Ö
dr
T
r
Ö
qr
(V-32)
56
Avec k M
ó L s L r
R R M 2
, 2
s r
ë = +
ó L ó L L
s s r
? Ë 1 ?
, ?
Ë = 2
2
2
? ?Ë 2 ?
Nous définissons la matrice des gains comme suit :
Ë 1
? ?
Ë i = Ë Ë pour i = 1,2 et j = 1,2 avec ?
j [ 1 2 ] Ë = 2 1
1 ? ?Ë 1 ?
Pour en avoir l'erreur d'observation, nous soustrayons (V-32) de
(V-31)
u
s
2
u
s
1
Ö
dr
ù
sl
-
qr
T
r
qr 2
& 1
i k
= Ö + ù Ö - Ë
k
ds T dr r qr
r
& 1
i k k
= -ù Ö + Ö - Ë
r dr qr
T
r
Ö = -
& 1 Ö + ù Ö - Ë 1 u
(V-33)
T
qs
1
1
dr dr sl qr 2 s
1 Ö - Ë
-
Ö &
2
u
s
r
Avec [ ]t
u s = sign (s 1 ) sign (s 2 )
? s ?
et ( y yà )
S =
1 ?? = -
?? s 2
Le vecteur d'erreur est : e = [ IS Ö r
]
Posons les représentations matricielles suivantes :
1
k
?
? T
C = [ 0 1] ,
? - ù
k k ?
r
? ?
k ù r
? ? ?
?
1
ù sl
-
-
-
T r
T r
? ? ? ? ? ?
1
A 2
ù sl
Le système (V-33) devient :
Ö = A
&
2 Ö r - Ë 2 u
1
s

I s = A 1 Ö r - Ë 1 u
&
1
s
(V-34)
La surfaceS=(y- yà )=y, d'où S=Is
(V-35)
? ä
Ë = + Ë - -
1 1 1
2 2 1 0
(Q A ) ?? ä
2
0
La fonction de Lyapunov est :
V t
1
= > 0 (V-36)
S S
2
D'où la dérivée V& ,
&
V & = S t I (V-37)

s
Notons que d dt doit être nulle.
Après un calcul intermédiaire, nous obtenons :
V & = S t A Ö - S Ë u
t 1 (V-38)
1 r 1 s
? ä ?
En posant ??
1 0 , il suffit de vérifier la condition (V-39) pour
satisfaire la
Ë =
1 0
?? ä 2
condition d'attractivité des surfaces.

ä 1S1 + ä
2S2 > S A Ö (V-39)
t
1 r
La détermination des gains se fait selon deux
étapes.
· La première consiste à satisfaire la
condition d'attractivité.
Ë = - 1 1
? ä
1 0
??
|
0
ä 2
|
?
??
|
(V-40)
|
|
· La deuxième consiste à imposer pour
l'erreur une dynamique de convergence exponentielle.
Lorsque le régime de glissement est établit
(Is = 0
& et I s = 0), nous avons :
~ = Ë - Ë Ö (V-41)
u s 1 1 1 r
Par substitution, l'erreur sur Ö r devient :
Ö & r = - - A 2 + Ë 2 Ë
- 1 A Ö
( 1 ) r
1(V-42) Pour que l'erreur converge exponentiellement,
nous devons poser :
Ö r = - QÖ r (V-43)
? q 0 ?
Avec ??
Q , q 1 , q2 sont des constantes
positives
1
= ?? 0 q 2
D'où :
Pour une raison de simplification, nous posons :
=Ë (V-45)
- 1
1
La condition d dt = 0 est vérifiée en
considérant que la vitesse est suffisamment lente
devant la dynamique de l'observateur. Ce qui en résulte
:
? ä 0 ?
1
Ë = A (V-46)
1 1 0
??ä ??
2
? ä 0 ?
1
Ë = -
(Q A ) (V-47)
2 2 0
?? ä ??
2
Par développement, nous obtenons :
? 1 ?
k - ù
k
? r ?
T r
? ?
? ?
( ) ?
2 k k
ù
+ ù
k r
r ? ? T r ?
2 ? 1 ? ? k ?
? Tr ?
1
1 (V-48)

? ? ? ? ? ?
1
k ù r
Ë1
T r
1
ä ä
1 k 1
T r
ä ù ä
2 r 2
k k
(V-49)
? - 1 ?
? q ?
? T r ?
ä ù
2 sl
?
ä ù
1sl ?
?
? ?
ä ? - 1
? q ?
2 2 ?
? T r ? ?
ä 1
Ë1
-
(V-50)
Ainsi, la condition d'attractivité devient comme suit :

ä 1 1 + ä 2 2 > Ö (V-51)
S S S t r
La dynamique de l'observateur doit être plus rapide que
celle du système à observer. Cela exige un choix convenable des
constantes ä 1 , ä 2 , q1,
q2.
V-4-3 Schéma de simulation
Nous simulons le comportement de l'observateur du flux rotorique
en utilisant le schéma de la figure V-3.
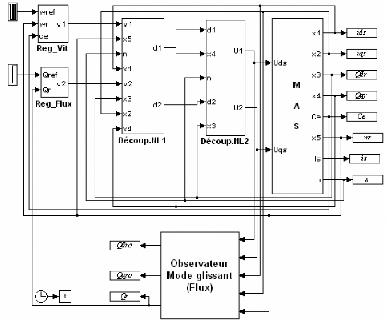
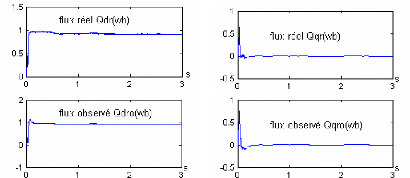
Fig V-3. Schéma de simulation de la commande
non linéaire de la machine
Asynchrone avec observateur par mode de
glissement du flux rotorique
A- Observation du flux rotorique de la MAS
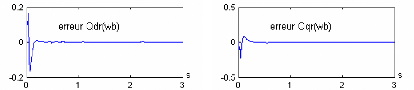
Fig V-4. L'évolution des flux observés
et l'erreur d'observation
Afin d'éviter le problème de chattering
la partie discontinue est adoucie par la forme à un seul seuil. Ceci
diminue l'invariance vis-à-vis les variations paramétriques. Les
paramètres de l'observateur sont regroupés dans le tableau
V-1.
La simulation effectuée dans la figure V-4 montre
l'évolution des flux réels et des flux observés de la
machine. Nous remarquons que les flux observés convergent rapidement
vers les flux réels et ne les quittent pas ultérieurement.
|
ä1
|
ä2
|
q1
|
q2
|
å1, å2
|
|
5
|
5
|
20
|
20
|
1
|
Tableau V-1. Paramètres de l'observateur MG
B- Réglage du flux rotorique de la MAS avec observateur
MG
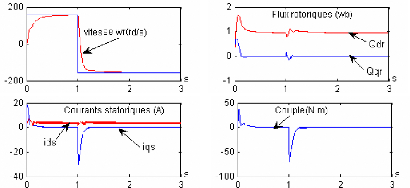
Fig V-5 Réglage du flux rotorique avec
observateur MG
La figure V-5 montre les résultats de simulation du
réglage du flux rotorique avec observateur par mode de glissement. Nous
remarquons que l'intégration de l'observateur n'a pas d'influence sur
les performances du réglage. D'autre part, le flux Ö r
est orienté dans la direction
`d' ( Ö dr= Ö r ; Ö qr
=0).
V-4-4. Estimateur de la vitesse rotorique
Les équations d'état de la machine asynchrone
exprimée dans un espace vectoriel sont
[34]:
r r
is
. Ö r
r =
+ a22
a21
.
j
. ù r
;
;
-
1
T r
M
Tr
a21
. ù r
a j
=
22
1
R .M
r
Lr
;
2
;
+
T r
D R
= s
B1
ó
L 2
r
L.
s
Rr
r
.v s
r
d Ö
dt
D
L . ó
S
;
L.
S
(
ó
M
M
L r
di s =
.
r r
+
is
+ a12
. Ö r
a11
B 1
dt
Lr
.Tr
Où :
a11
1
a12
);
Chapitre V Commande non linéaire avec
observateur du flux par mode glissant et estimateur de vitesse
rotorique
r
Fig V-6. Schéma bloc de la vitesse rotorique
estimée
Ce système d'équation peut être
réarrangé comme suit :

(V-53)
r
r
r s
v (R R ) . i L . .
s s r
= + + ó
L .T L
r r r
2 r
d i
L 2
r
dt
s s r
MM r r
M
Ö + ù Ö
.j .
r
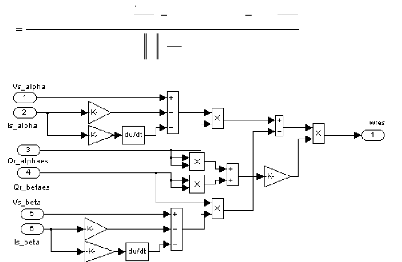
di
à
à
s â
)
L . ó
s
L . ó
s
Ö r â
Ö - -
r s s
(v D.i
á â â
dt
r
2
à
Ö
di
sá
dt
s s
- D.i
á á
(v
à
ùr
M
Lr
(V-54)
Considérant que les vecteurs tension, courant et flux
rotorique peuvent êtres exprimés sous forme complexe, à
partir de l'équation (V-53), on déduit la vitesse rotorique
estimée :
La figure V-6 montre le diagramme de l'algorithme de la vitesse
rotorique. Cette dernière est déterminée à partir
des tensions, des courants et du flux rotorique dans le repère
á-â.
V-4-5. Schéma de simulation
Nous simulons le comportement de l'observateur du flux rotorique
et de la vitesse en utilisant le schéma de la figure V-7
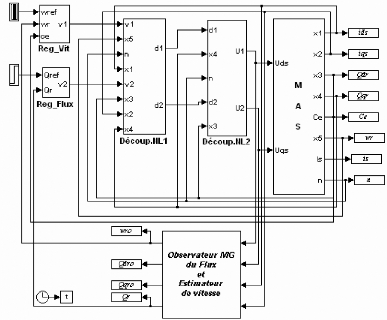
Fig V-7. Schéma de simulation de la commande
non linéaire de la machine asynchrone avec
observateur par mode de
glissement de flux et estimateur de vitesse rotoriques
La figure V-7 montre le schéma de principe de
régulation avec observateur par mode de glissement. Afin
d'apprécier les performances de la commande et de l'observateur par mode
de glissement, nous présentons les simulations du comportement de
l'association système observateur dont les paramètres sont
regroupés dans le tableau V-1.
V-4-6. Résultats de simulation
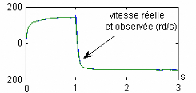
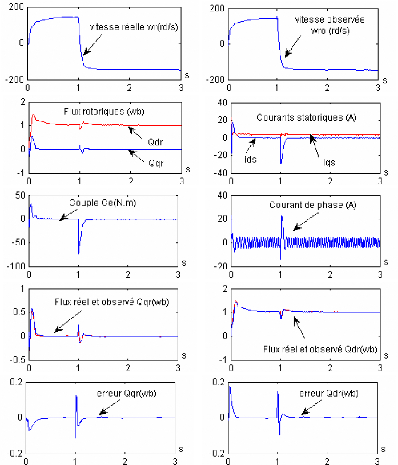
Fig V-8. Réglage de la MAS sans capteur
mécanique
La figure V-8 montre que le système est
découplé et que les réponses sont sans erreurs statique et
sans dépassement.
Nous remarquons aussi que l'intégration de l'observateur
n'a pas d'influence sur les performances du réglage.
V-5. Conclusion
Dans ce chapitre, nous avons présenté la commande
non linéaire avec observateur par mode de glissement du flux et de
l'estimateur de vitesse rotorique.
Nous nous sommes intéressés de plus près
à l'incorporation de deux types d'observateur à la boucle de
régulation. A savoir un observateur à terme correctif classique
et un observateur par mode de glissement. Chaque observateur et associé
à la commande non linéaire de la machine basé sur le
modèle non linéaire simplifié avec limitation direct du
courant
L'observateur par mode de glissement a montré des
performances moins intéressantes par rapport à celles de
l'observateur classique.
Pour améliorer cette structure de commande et augmenter sa
robustesse on fera appel à la commande par logique floue et c'est
l'objet du chapitre suivant.
CHAPITRE VI
CONTROLE PAR REGLAGE FLOU DE LA
MACHINE ASYNCHRONE
CHAPITRE VI : CONTROLE PAR REGLAGE FLOU DE
LA MACHINE ASYNCHRONE
VI-1. Introduction
Les bases théoriques de la logique floue ont
été établies en 1965 par le professeur « LOTFI A.
ZADEH » de l'université de Berkeley Californie.
Qui a prouvé le besoin de formaliser la
représentation et le traitement des connaissances imprécises ou
approximatives. En 1974, MAMDANI, effectue la première
application industrielle d'un contrôleur flou. A partir de 1985, ce sont
les japonais qui commencent à utiliser la logique floue dans des
produits industriels pour résoudre des problèmes de
réglage et de commande. Le contrôle par logique floue peut
s'appliquer lorsque les procédés à commander sont mal
connus ou difficile à décrire précisément ou
lorsque les variables sont évaluées subjectivement et
exprimées en langage naturel. Pour établir les lois de commande
floue, on s'inspire de l'expérience de l'opérateur ou des
connaissances des experts.
VI-2. Définitions de Notions sur les Ensembles
Flous VI-2-1 Définition d'un Ensemble Flou
Soit un univers X, on définit un ensemble flou A dans X
par l'application de A de X dans l'intervalle [0; 1].
A tout élément x E X on associe la valeur
A (x) telle que :
0~ A ~1( A :X--[0,1])
L'application A est appelée fonction
d'appartenance de l'ensemble flou A. - A (x) = 0; x n'appartient pas
à A.
- A (x) = 1; x appartient à A il satisfait
pleinement la propriété A. - A (x) ~ 0; 1 alors
A (x) est une valeur intermédiaire entre 0 et 1. x appartient
à l'ensemble flou A. On dit que x E A avec le degré A
(x).
Les fonction d'appartenance les plus utilisées sont :
triangulaires, trapézoïdales, segmoîdales et gaussiennes
[16,35,36].
VI-2-2. Support d'un Ensemble Flou
Soit un ensemble flou A dans l'univers X, le support de A
noté supp (A) est un sous- ensemble ordinaire de X dont chacun des
éléments a un degré d'appartenance non nul, par rapport
à A
Supp (A) ={x? X;ìA(x)?0} (VI-1)
VI-2-3. Noyau d'un Ensemble Flou
Le noyau d'un ensemble flou A de X est un sous-ensemble ordinaire
de X dont chaque élément a un degré d'appartenance
égal à 1.
Noy(A)={x? X;ìA(x)=1} (VI-2)
Lorsque le noyau n'est pas vide Noy(A) ? 0 ; on dit que
l'ensemble flou A est normal ou normalisé.
VI-2-4. Hauteur d'un Ensemble Flou
La hauteur d'un ensemble flou A dans X est la valeur maximum de
la fonction d'appartenance : C'est le plus grand degré d'appartenance
deA.
H(A) = max(ì A (x);x? X) (VI-3)
VI-2-5. Cardinal d'un Ensemble Flou
Le cardinal d'un ensemble flou A de support fini est égal
à la somme des degrés d'appartenance des éléments
de ce support :

Card(A) A (x) ; on note aussi A (VI-4)
= ì
?
Dans le cas d'un support infini on a :
Card(A) A (x)dm(x) avec ? =
= ?ì dm(x) 1 (VI-5)
x x
VI-3. Opérations sur les Ensembles Flous
Les opérations sur les ensembles flous sont des extensions
des opérations connues sur les ensembles classiques:
VI-3-1. Egalité
Soit deux ensembles flous A et B dans un univers X. On dit que A
et B sont égaux (A = B) si leurs fonctions d'appartenance ont la
même valeur en tout point x de X :
ì = ì ? ?
A B
(x) (x) x X.
? xX telque
? ì A
x) (x) A B
? ì ?
B
Si
(
(VI-6)
VI-3-2. Inclusion
Soit deux ensembles flous A et B dans un univers X. On dit que A
est inclus dans B noté A ? B si leurs fonctions d'appartenance sont
telles que:
?x? X;ìA(x) = ì B(x)
(VI-7)
L'inclusion définit une relation d'ordre. VI-3-3.
Intersection
L'intersection de deux sous-ensembles flous A et B de X est un
sous-ensemble de X qui contient tous les éléments x de X
appartenant à la fois à A et B. L'intersection de deux sous-
ensembles flous A et B (A n B) de X est le sous-ensemble flou C tel que
[16,35,36]:
( x))
? ? ì C = ì A ì B
x X; (x) min( (x) ,
Où
ìC = ì A(x)* ì
B(x) (VI-8)
VI-3-4. Union
L'union de deux sous-ensembles flous A et B de X est un sous
ensemble flou de X qui contient tous les éléments appartenant ou
bien à A ou bien à B.
L'union de deux sous-ensembles flous A et B (A ? B) de X est le
sous-ensemble flou D
deX tel que:
|
? ? ì D = ì A ì B
x X; (x) max( (x), (
|
x))
|
Où
)
ì = ì + ì - ì ì
D A B A B
(x) (x) (x) (x) * (x
|
ì = ì
D A
(x) (
|
x) (
? ì B
|
x)
|
(VI-9)
VI-3-5. Complément d'un sous-ensemble Flou
Soit un sous-ensemble flou A de X, son complément est un
sous-ensemble contenant tous le x n'appartenant pas àA. Le
complément C
A d'un sous-ensemble flou A de X est définit comme le
sous-ensemble flou de X de fonction d'appartenance :
?x?X; ìAC(x)=1-ìA(x)
(VI-10)
VI-4. Raisonnement en Logique Floue
La logique floue permet le traitement souple de connaissances
imprécises ou incertaines, ce qui serait impossible avec le logique
classique.
On peut considérer que la logique floue est une
extension de la logique classique. Les propositions sont des propositions
floues définies à partir d'un ensemble L de variables
linguistiques (x, T(x), X). Leurs valeurs de vérité appartient
à tout l'intervalle [0; 1] et elle est
fournie par la fonction d'appartenance de la
caractérisation floue utilisée dans la proposition floue
[36,37].
Soit x une valeur linguistique et A une
caractéristique.
> Proposition
Une proposition floue est définie à partir d'une
variable linguistique (x, T(x), X) par la qualification: « x est A
»
> Conjonction
La conjonction de deux propositions floues est
réalisée par l'opérateur ET par exemple : « x1 est A1
ET x2 est A2 »

> Disjonction
La disjonction de deux propositions floues est
réalisée par l'opérateur OU par exemple : « x1 est A1
OU x2 est A2 »
> Implication
Une implication entre deux propositions floues définit
aussi une proposition floue que l'on peut exprimer par : « SI x1 est A1
ALORS x2 est A2 »
> Règle Floue
Une règle floue est une proposition floue utilisant une
implication entre deux propositions floues quelconques. Par exemple: « SI
x1 est A1 ET x2 est A2 ALORS x3 est A3 »

Où :
SI x1 est A1 ET x2 est A2 est la permise.
x3 est A3 est la conclusion.
En utilisant les règles de composition
d'inférences, nous pouvant formaliser une procédure
d'inférence appelé raisonnement flou sur l'ensemble des
règles (Si - Alors)
La règle de base d'inférence est le
Modus-Ponens, selon qu'on peut déduire la vérité
de la proposition A2 de la vérité de la proposition A1 et de
l'implication A1 A2. Ce concept est illustré ci-dessous:
Pr emisse1 (fait observé) x1 est A1
|
Pr
|
emisse2 (règle)
|
SI
|
x1 est A1 ALORS
|
x2 est A2
|
|
|
|
|
|
|
Conclusion x2estA2
Le Modus-Ponens de la logique classique ne permet
d'obtenir une conclusion à la seule condition que la proposition soit
exactement vérifiée. Il convient donc d'adapter cette forme de
raisonnement aux ensembles flous. Il convient donc d'utiliser le
Modus-Ponens Généralisé énoncé sous
la forme [16, 35]:

|
Pr
|
emisse1 (fait observé)
|
x1 est A1
|
|
|
Pr
|
emisse2 (règle)
|
SI
|
x1 est A1 ALORS
|
x2 est A2
|
|
Conclusion x2 est A2'
VI-5. La Commande Floue
Introduction
Le but de la commande floue est de traiter les
problèmes de commande de processus avec une approche différente
de l'automatique classique. Le plus souvent elle se sert de la connaissance des
experts du processus. La spécificité de la commande floue
réside dans les points suivants:
> La connaissance mathématique du fonctionnement du
processus n'est pas nécessaire. C'est le savoir faire de
l'opérateur qui est pris en compte.
> Des variables subjectives sont utilisables. Il est possible
de modéliser les sens Humains [37, 38].
L'intérêt de la commande floue apparaît
clairement dans le cas de système mal connu ou difficile à
décrire. De même manière lorsque les variables sont
décrites de façon imprécise ou en langage naturel [38].
VI-5-1. Intérêt de la commande floue
> La commande est simple à réaliser, facilement
adaptable aux conditions de fonctionnement. La plupart du temps un petit nombre
de règle suffit à décrire le système.
> La coordination de plusieurs objectifs est possible
(système multivariable). > Cette commande est reconnue comme
robuste.
VI-5-2. Le Contrôleur Flou
Le contrôleur flou peut être
considéré comme un système expert simple. La
représentation des connaissances est basée sur les ensembles
flous dont les règles fournissent directement les conclusions
[36,37,38].
La configuration de base d'un contrôleur flou comprend les
éléments suivants:
a) Fuzzification:
C'est la partie du contrôleur flou chargé de
convertir les grandeurs physiques (réelles) en variables
linguistiques.
A l'univers de discours d'une entrée x (ensemble des
valeurs possibles de x), on associe N sous-ensembles flous notés
Ei (variables linguistiques ). Chacun de ceux-ci sera défini
par sa
fonction d'appartenance (x) ,
ì E I 0 <ì Ei (x) < 1.
La fuzzification proprement dite consiste à
définir les fonctions d'appartenance pour les différentes
variables d'entrées et de sortie. Dans ce but, les grandeurs physiques
(par exemple l'erreur et la dérivée de grandeur à
réguler) sont réduites à des grandeurs
normalisées.
b) Bases de règles:
Elles contiennent les définitions des termes
utilisés dans la commande et l'ensemble des règles
caractérisant la cible de la commande et décrivant la conduite de
l'expert.
c) Inférence:
L'inférence transforme à l'aide des règles
la partie floue issue de la fuzzification en une nouvelle partie floue qui
caractérise la sortie du contrôleur.
Les valeurs des variables d'entrée et de sortie sont
liées par plusieurs règles qui doivent tenir compte du
comportement du système à régler. La stratégie de
réglage dépend essentiellement des inférences
adoptées. Il n'est pas possible d'indiquer des règles
précises, l'expérience joue un rôle très
important.
Les méthodes d'inférence les plus utilisées
sont:
> Méthode d'inférence max-min. >
Méthode d'inférence max-prod. > Méthode
d'inférence somme-prod.
- Méthode d'inférence
somme-produit:
La méthode d'inférence somme-produit
réalise, au niveau de la condition, l'opérateur
Ou par la formation de la somme, tandis que l'opérateur
Et est réalisé par la formation du produit. La
conclusion de chaque règle, précédé par
Alors, liant le facteur d'appartenance de la condition
avec la fonction d'appartenance de la variable de sortie par
l'opérateur Et, est réalisée par la
formation du produit.
L'opérateur Ou, qui lie les différentes
règles, est réalisé par la formation de la somme moyenne;
ainsi s'explique la désignation par som-prod de cette méthode.
La méthode d'inférence som-prod est
représentée graphiquement à la figure VI-1:
Si x1 pg Et
x2 ez Alors x R ez
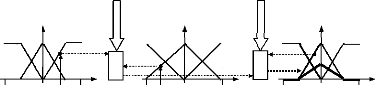
J-t
ng ez pg
J-t
J-t
ng ez pg
0.67
ng ez pg
X
0.33
0.2
X
0.22
-1 0
0 1 x2
-1 0 1
1
x1
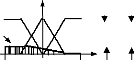
J-t
1
+


J-t Res(x)
x
2 =-. 67

J-t
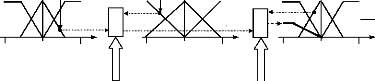
-1
J-t
J-t
ez
pg
ez pg
ng
ng
ng ez pg
0.67
0.
X
0.33
+
0.
-1 0
x1 0 x2
1 -1 1 -1 1
0
Si x1 ez Ou
x2ng Alors x R =ng
Fig VI-1. Méthode d'inférence
some-produit
d) La défuzzification:
Les méthodes d'inférences fournissent une fonction
résultante J-t pour la variable
Re s (x R )
de sortie x. L'opérateur de défuzzification
permet de calculer à partir de cette dernière la valeur
R
réelle de la variable de sortie à appliquer au
processus.
On distingue trois méthodes de défuzzification
différentes : celle du maximum, celle de la moyenne des maxima et celle
du centre de gravité (ou centroïde). Il est toutefois reconnu que
la méthode de centre de gravité donne les meilleurs
résultats.
i Méthode de défuzzification par Centre de
Gravité:
Son principe est basé sur le calcul de l'abscisse du
centre de gravité de la fonction d'appartenance résultante de la
variable de sotie (fig VI-2).
*
x R
x
R
Fig VI-2. Défuzzification par centre de
gravité
Le calcul de l'abscisse du centre de gravité de la surface
limitée par la fonction d'appartenance résultante est
donné par l'équation suivante:
1
|
? x (
ì
R Re s
|
x ) dx
R
|
R
|
x (VI-11)
* = 1
- 1
R
s
( x ) dx
R
ì Re
R
?
1
-
VI-6. Conception du régulateur flou
L'illustration du contrôleur flou se fait sur l'exemple de
la régulation de vitesse de la machine asynchrone.
VI-6-1 Choix des entrées et sorties
Dans le cas de la régulation de vitesse, on utilise
habituellement l'erreur = ù ref - ù
e et
la dérivée de l'erreur de :
|
e(k)
|
=
|
ù - ù
ref (k) (k)
|
(VI-12)
|
de(k) e(k) e(k 1)
= - -
La structure du régulateur de vitesse à logique
floue est représentée par la figure VI-3. Le système est
constitué:
i Du contrôleur flou composé:
· d'un block de fuzzification de l'erreur et de sa
variation ;
· des règles de contrôle flou et d'un moteur
d'inférence ;
· d'un block de défuzzification utilisé pour
la variation de la commande floue en valeur numérique.
i D'un block intégrateur.
i Du processus à contrôler.
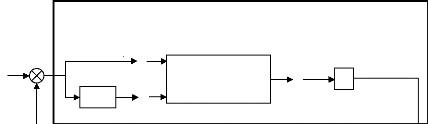
ùref
+
-
ù
Contrôleur flou
d/dt
de
e
Ø
Ø
Kde
Ke
Fuzzification Règles de contrôle
Défuzzification
diq Kdiq
Ø
?

Limitation du couple

Processus
Fig VI-3 Structure d'une commande à logique
floue
VI-7. Type de régulateurs flous
Il existe plusieurs types de régulateurs flous qui
diffèrent de mécanisme d'inférence utilisé, dont on
cite: régulateur de Mamdani, et de Sugeno.
a) Régulateur Mamdani:
On donne l'expression générale d'un
contrôleur de Mamdani, en exprimant le graphe flou en fonction des
opérateurs choisis, c'est à dire l'opérateur
min. pour représenter le graphe flou associe
à chaque règle et l'opérateur
max. pour l'agrégation [35,36].
Exemple :
Considérons un ensemble de deux règles
définies par: R1 : Si x est A1 et y est B1 alors z est C1
R2:Si x est A2 et y est B2 alors zest
Pour x0 et y0 on aura á 1
et á2 caractérisant les degrés de confiance de
R1et R2 avec :
á1 = min( ì A1 (x
0 ), ì B1 (y 0 ))
á
=min(ì A 2 (x 0 ), ì B 2 (y 0 ))
2
La première règle donne :
ì? C1 (z) = min(á1,ì C 1( z))
La deuxième règle donne :
ì? C 2 (z) = min(á2,ì C 2( z))
Le résultat des deux règles est :
ì? C (z) = max(ìC1(z),ì( z))
Le raisonnement flou de Mamdani est donné
à la fig.VI-4:
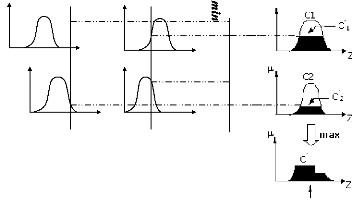
z
Fig VI-4. Système d'inférence floue de
Mamdani
ì A1 ì ì
B1
X Y
A2
ì
B2
X Y
y
x
ì
b) Régulateur de Sugeno:
Le modèle de Sugeno (aussi connu sous le nom
du modèle de TSK) était proposé par Takagi, Sugeno et
Kang dans le but de développé une approche
systématique pour la génération des règles floues
à partir d'un ensemble de donnée entrée-sortie [35].
La règle floue typique dans le modèle de
Sugeno est sous la forme :
|
Si x est A et y est B alors z f
=
|
(x,y).
|
Oùf(x, y), généralement un polynôme,
est en fonction des entrées x et y. Exemple : Considérons un
ensemble à deux règles (fig.VI-5):
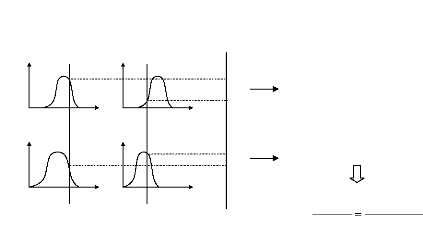
ì
1 p 1 x q 1 y r 1
= + +
R1 : Si x est A1 et y est B1 alors z
2 p 2 x q 2 y r 2
= + +
R2 : Si x est A2 et y est B2 alors z
ù1
ù
i
ù
1
+ù
2
z1 =p1x+q1y+r1
X
Y
ì
B2
A
z2 =p2x+q2y+r2
ù2
2
ù i i z z
z ù + ù
1 1 22
=
x
X
y
Y
z
?
i
ì ì
A
1
B1
Fig VI-5. Système d'inférence floue de
Sugeno VI-8. Application du contrôleur flou au réglage de la
vitesse
En utilisant la même structure de la commande que celle
présentée dans le chapitre précédant on remplace
seulement le régulateur classique (PI) par un régulateur flou du
type Sugeno dont les variables linguistiques sont:
> En entée l'erreur et la variation de l'erreur
notée respectivement `e ' et `de ' > En sortie Äu.
L'intervalle de chaque variable linguistique est subdivisé
en trois classes. A chacune des classes on associe une fonction
d'appartenance.
Ces classes sont comme suit :
ng : négative grand ez :
égal zéro pg : positive grand
En se basant sur le fonctionnement du régulateur et le
comportement de la machine, on déduit les règles
d'inférences floues suivantes:
|
Äu
|
|
e
|
|
|
ng
|
ez
|
pg
|
|
de
|
ng
ez
pg
|
ng
ng
ez
|
pg pg ng
|
ez pg pg
|
Tableau VI-1. Règles d'inférences
floues
Les paramètres Ke, Kde, et KÄu
représentent les gains d'adaptation du contrôleur flou ; ils
jouent un rôle extrêmement important dans les performances de la
commande.
VI-9. Avantages et inconvénients de la logique
floue
La logique floue n'est pas une solution à tous les
problèmes que l'on peut rencontrer lors de la conception d'une
régulation. Elle présente des avantages mais aussi certains
inconvénients.
VI-9-1. Les avantages essentiels
- La modélisation facultative du
procédé.
- La possibilité en cours de conception d'enrichir le
système flou par des connaissances. de l'opérateur sur le
fonctionnement du procédé.
- La maîtrise et l'appréhension du système
à régler lorsque celui-ci a un comportement complexe.
- L'utilisation de la conception.
VI-9-2. Les inconvénients essentiels
- Le manque de directives précises pour la conception, il
faut établir une stratégie de mesure de façon à
réaliser la meilleure étude heuristique.
- L'approche de la conception est donc artisanale est sa
systématique pour le moment. - L'ignorance de la détermination la
plus efficace du processus flou.
- La cohérence des inférences non garantie
à priori, certaines règles peuvent être contradictoires
entre elles.
- L'impossibilité de démontrer la stabilité
du circuit de réglage en toute généralité. - La
difficulté d'obtenir un procédé précis.
VI-10. Simulation
Le schéma bloc de simulation par logique floue du
système de commande non linéaire de la machine asynchrone
alimentée en tension avec orientation du flux rotorique est donné
à la figure VI-6.
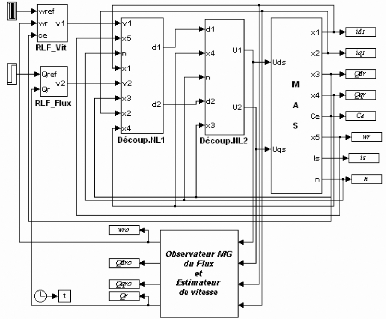
Fig VI-6. Schéma bloc de simulation Sous
Simulink du réglage flou de la commande non
linéaire de la MAS
en tension avec observateur MG.
VI-11. Résultats de simulation et
interprétation
Les graphes de la figure VI-7 représentent la vitesse
et son inversion, le couple électromagnétique, les courants
Ids et Iqs. Lors du réglage flou de la
machine asynchrone sans capteur mécanique et avec observateur du flux
par mode glissant, on remarque que le couple suit Iqs et
Ids contrôle le flux. Le découplage flux-couple est maintenu
en régime statique. Lors de l'inversion de la vitesse le courant
statorique présente un pique, qui reste dans les limites du
fonctionnement de la machine. De même, on remarque que le flux
observé suit le flux de la machine et la même remarque pour la
vitesse estimée par rapport à celle de la machine. On remarque
aussi que cette inversion est rapide par rapport au correcteur PI.
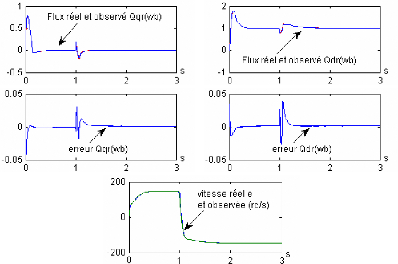
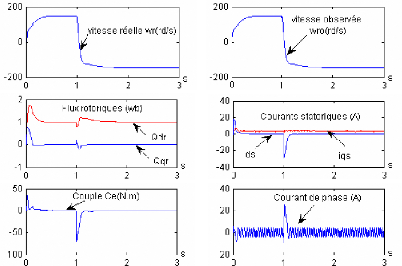
Fig VI-7. Réponses floues aux
échelons de vitesse plus ou moins 156rd/s de la commande
non
linéaire de la MAS alimentée en tension avec observateur
MG
VI-12. Test de robustesse
· Réglage PI
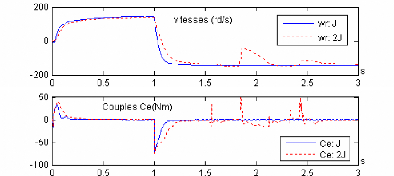
Fig VI-8. Test de robustesse de la commande non
linéaire de la MAS Alimentée en tension avec un régulateur
PI et avec observateur du flux par MG et sans capteur mécanique lors
d'une variation du moment d'inertie (J, 2*J)
· Réglage flou
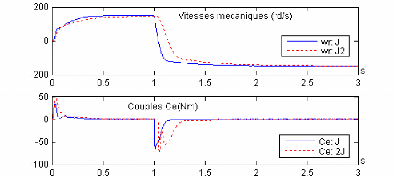
Fig VI-9. Test de robustesse du réglage flou
de la commande non linéaire de la MAS Alimentée en tension avec
observateur du flux par MG et sans capteur mécanique lors d'une
variation du moment d'inertie (J, 2*J)
Le système est sensible aux perturbations externes de
la charge dans le cas d'un régulateur PI. Tandis que, dans le
réglage flou, il est moins sensible. Donc, pour les deux techniques on
peut dire que le réglage par logique flou est plus performant et plus
robuste que le réglage par régulateur PI (figureV-8).
VI-13. Conclusion
L'application de la logique floue à la commande non
linéaire de la machine asynchrone alimentée en tension par
orientation du flux, permet l'amélioration des performances (le
réglage de vitesse, des flux, du couple et des courants sont
satisfaisants) par rapport aux régulateurs classiques. Le
découplage est assuré en cas de variation de la vitesse.
D'autre part, cette technique de contrôle ne tient pas
compte du modèle, elle est basée surtout sur l'expertise de
l'opérateur expert en commande. La structure de commande est
simplifiée du point de vue encombrement où les capteurs sont
remplacés par des algorithmes de calcul (observateur de flux et
estimateur de vitesse).
Le flux observé par la technique à mode glissant
suit correctement le flux de la machine et présente une certaine
robustesse due au principe des systèmes à structure variable. De
même la vitesse estimée évolue avec une large erreur en
régime transitoire, comparativement à la vitesse de la machine.
Le découplage est toujours maintenu après un régime
transitoire très court grâce aux régulateurs par la logique
floue.
CONCLUSION
GENERALE
Conclusion générale
CONCLUSION GENERALE
Ce travail est une contribution à l'application de la
commande non linéaire avec pilotage vectorielle sans capteur
mécanique d'une machine asynchrone alimentée en tension.
Dans un premier temps, après avoir défini le
modèle de la machine dans un repère de Park lié
au champ tournant, nous avons abordé la technique d'orientation du flux
rotorique de la commande vectorielle, cette dernière permet de
découpler la commande du flux de celle du couple. En effet, si le flux
est maintenu constant à sa valeur de référence, la machine
fournit à tout instant un couple maximale.
Nous avons choisis la méthode indirecte pour
l'orientation du flux, le correcteur à action proportionnel
intégral PI présente de bonnes performances dans le cas où
le système est invariant et fonctionne à flux constant. Cette
technique d'orientation du flux permet de travailler pour les vitesses
inférieurs (n<nn), tandis que la technique de commande non
linéaire basée sur la linéarisation entrée-sortie,
permet de découpler complètement le système et la machine
peut fonctionner pour les survitesses avec un flux défluxé tout
en maintenant l'orientation du flux.
D'autre part, elle permet de contrôler
indépendamment le flux et le couple par des régulateurs
classiques, tout en supposant que le flux est mesurable. Cependant le flux est
difficilement accessible ce qui nous oblige à utiliser les observateurs
ou des estimateurs de flux, pour notre cas on s'est intéressé
à l'observateur du flux à mode glissant. Pour réduire le
coût et limiter l'encombrement de la machine, on opte pour la commande
sans capteur mécanique où la vitesse est reconstruite par un
estimateur.
Cette structure de commande non linéaire sans capteur
mécanique avec flux observé, et réglage classique
présente de bonnes performances lorsque le système fonctionne
dans les conditions idéales. Dans le cas ou le système est
susceptible de varier, il est préférable d'adapter le
système ou de voir un régulateur robuste. Pour notre cas, on
s'est intéressé au régulateur à logique floue, qui
est basé sur la modélisation linguistique du raisonnement d'un
opérateur
Conclusion générale
expert en contrôle, afin de garder, les performances du
système pour une large plage de variation du système.
Les tests de simulation avec ce régulateur pour notre
structure de commande mettent en évidence la robustesse de ce
contrôleur vis à vis des perturbations.
Perspectives :
Finalement nous espérons que ce modeste travail, ouvre la
voie devant de nombreuses directions pouvant êtres exploitées dans
l'avenir. En outre nous citons :
- Le découplage de la machine asynchrone par d'autres
techniques de commande non linéaire (passivité, perturbation
singulière, commande par platitude...)
- Le contrôle du système par les régulateurs
robustes (neuro-flou, mode glissant, 8
H ...).
BIBLIOGRAPHIE
Bibliographie
[1] Guy SRURTZER, Eddie SMIGEL « Modélisation et
commande des machines triphasés » Edition ellipes.
[2] J.P Caron et J.P Hautier « Modélisation et
commande de la machine asynchrone » Edition technip 1995.
[3] B.trannoy « Modélisation des machines
asynchrones, modèle de park » INP Toulouse, 1993.
[4] Va, p «Vector of control AC machines «, Ed oxford
university press, 1990.
[5] Barret Phillipe, « Régimes transitoires des
machines tournantes electriques » Cours de l'école
supérieure d'électricité Eyrolles 1982 Leonard W «
Control of electrical drives » Springer Verlag Heidelberg 1990.
[6] Texas instruments « Field oriented control of three
phase AC motors » BRAP 073 dec 1997.
[7] Francis BRICHANT « Les onduleurs autonomes, conceptions
et applications industrielles » Edition Dunod, 1982.
[8] A. Meroufel, M.K. Fellah, Y. Ramdani
« Commande vectorielle indirecte d'un moteur asynchrone
associé à un commutateur de courant » IMCESS 99
Université de Sidi Bel Abbès
[9] Y. Fu « Commandes découplées et
adaptatives des machines asynchrones triphasées » Thèse de
doctorat de l'université de Montpellier II Mars1991
[10] P. Vas « Vector control of ac machines » Caledon
press, Oxford 1990
[11] G. Buche « Commande vectorielle de machine asynchrone
en environnement temps réel Matlab/Simulink » PFE C.N.A.M Grenoble
(C.U.E.F.A) 07 Mars 2001
[12] Lajoie. Mazence « Les techniques de commande
vectorielle des machines asynchrones destinées à la variation de
vitesse à haute performance » EDF 92 NIR 002 Janvier 1992
[13] G. Capoline et Y.Fu « Commande des machines
asynchrones par flux orienté : principe, méthode et simulation
» journée SEE, actionneurs électriques, 1989
[14] A. Meroufel « Commande découplée d'une
machine asynchrone sans capteur mécanique » thèse de
doctorat de l'université de Sidi Bel Abbés 2004.
[15] A. Meroufel, M.K. Fellah, Y. Ramdani, A. Benaissa «
Commande vectorielle d'un moteur asynchrone alimenté par un commutateur
de courant à MLI » international conférence of electrical
engineering ICEE'200, Boumerdes, 04-06 Nov 2000.
[16] A. Massoum « Réglage flou et neuro-flou d'une
machine asynchrone sans capteur mécanique » Thèse de
magister Sept 2003.
[17] H. Buhler « Conception des systèmes
automatiques » complément du traité de
l'électricité, Presses Polytechniques Romandes, 1988.
[18] Fliess, M and I.Kupka «A finitness criterion for non
linéaire input-output differential systems» SIAM Journal of control
optimization 21, 1983, pp 721-728.
[19] Isidori, A «Nonlinear control systems»
2e edition Spinger-verlag, 1989.
[20] B. Belabbes « Commande linéarisante d'un moteur
synchrone à aimants permanent » Thèse de magister
Université de Sidi Bel Abbés 2001.
[21] A. Kadouri, S. Blais et M. Ghribi «
Développement d'un outil de conception non linéaire basé,
sur la géométrie différentielle » Proceeding CEE'02,
10-11 Dec Batna, pp 74-79.
[22] A. Meroufel, M.K.Fellah, B. Belabbes, A. Benaissa «
Linéarisation entrée-sortie et commande en vitesse par mode de
glissement d'une machine. Synchrone à aimants permanent associée
à un onduleur trois » Proc.CNEA'04, U SBA, 23-24 Mai 2004, pp
[23] Pioufle « Comparaison of speed nonlinear control
stratigies for sychronous servomotor » Electric Machines and Power
Systems, 21, pp 15 1-169, 1993
[24] T.V. Raumer « Commande non linéaire adaptative
de la machine asynchrone » Thèse de doctorat INP de Grenoble 4
Juillet 1994
[25] Dong-Choon Lee, G-Myoung Lee, and Ki-Do Lee «
DC-bus voltage control of three phase AC/DC PWM Converters using feedback
linearization » IEEE Trans.On .Ind. Appl. Vol 36, N° 3, May/June
2000
[26] Hyungbo Shim and J. Heon Seo «Nonlinear output
feedback stabilization on bounded region Of attraction» Int. J. Control,
2000, vol 73, N° 5, pp 416-426
[27] A. BENTAALLAH, A. MEROUFEL, A. MASSOUM, M.K. FELLAH, «
Réglage et linéarisation entrée-sortie d'une machine
asynchrone alimentée en tension » ICEL 2005 International
Conference on Electrotechnics, U.S.T. Oran
[28] J.J.Slotine, J. K. Hedrik, and E. A. Misawa, «On
sliding observers for nonlinear systems,» ASME J. Dynam. Syst. Meas., vol.
109, pp. 245-252, Sept. 1987.
[29] A. KERBOUA, « Commandes et observateurs par mode
glissant: Application a une machine asynchrone alimentée en tension
» Thèse de magister, ENP 1999
[30] G. C. Verghese, «Observers for Flux Estimation in
Induction Machines», IEEE Trans. on Ind. Elec., Vol. 35,No. 1,
February 1988, pp. 85-94
[31] UTKIN V.I., 1993, «Sliding mode control design
principles and applications to electric drives», IEEE Trans. Indus.
Electro., 40, 26-3 6.
[32] DOTE Y. et ANBO K. «Combined parameter and state
estimation of controlled current induction motor drive system via stochastic
non linear filtering technique», In IAS Annual Meeting.
Cleveland, p. 838-842, 1979.
[33] DJEMAI M., HERNANDEZ J. et BARBOT J.P. «Nonlinear
control with flux observer for a singularly perturbed induction motor», In
IEEE Conf. on Decision. And Control, 33, p.3391-3396, 1993.
[34] S. Sthiakumer, «Dynamic flux observer for induction
motor speed control», Lecturer in school of electrical and information
engineering. University of Sydney, NSW2206, Australia.
[35] HEIKKI KOIVO :"Fuzzy Exercices ",2000.
[36] MIKKO HIIRSALMI, ANTTI PESONEN, ANTONI WOLSKI:"Discovery of
Fuzzy Models from Observation Data",FUME Project,2000.
[37] ROBERT BABUSKA :"Fuzzy and Neural Control "; Disc Course
Lecture Notes, October 2001
[38] H.BUHLER :"Réglage par Logique Floue" ,1994.
Résumé - Ce travail
entre dans le cadre de la commande non linéaire des machines
électriques sans capteur mécanique. La technique de l'orientation
du flux permet de découpler le modèle de la machine et de
travailler à flux constant. La stratégie de commande non
linéaire basée sur la linéarisation entrée-sortie
assure un découplage complet entre le flux et le couple ce qui permet
à la machine de travailler en mode def luxé et dans des
régimes supérieurs à la vitesse nominale. Le flux et la
vitesse sont déterminés par des algorithmes de calcul
(observateur de flux à mode glissant et estimateur de vitesse) en vue de
réduire le coût et l'encombrement de la structure de commande. Le
réglage des variables flux et couple est assuré par des
contrôleurs à logique floue pour assurer une certaine robustesse
au système de commande. Mots clés :
Machine asynchrone, réglage classique, observateur de flux
à mode glissant, estimateur de vitesse, logique floue.
ABSTRACT - This work enters
within the framework of the nonlinear control of the sensorles electrical
machines. The flow orientation technique permits to decouple the machine model
and to work with constant flux. Nonlinear control strategy based on the
input-output linearization ensures a complete decoupling between flux and the
torque what makes the machine working in defluxed mode and in intervals higher
then the nominal speed. Flux and speed are determined by calculation algorithms
(sliding mode flux observer and estimator speed) in order to reduce the cost
and the obstruction of the control structure. The control of the flux and
torque variables is ensured by fuzzy logic controllers to ensure certain
robustness to the control device.
Key words:
Asynchronous machine, classical control, sliding mode flux
observer, speed estimator, fuzzy logic control.


