CHAPITRE I
MODELISATION DE L'ENSEMBLE
MAS-ONDULEUR DE TENSION
CHAPITRE I: MODELISATION DE L'ENSEMBLE
MACHINE ASYNCHROME-ONDULEUR DE TENSION
I-1. Introduction
L'objectif de ce chapitre est l'élaboration du
modèle de la machine asynchrone triphasé destiné aussi
bien à l'étude de son comportement qu'à la mise en place
des fonctions de la commande.
Ensuite, on rappelle brièvement le modèle du
convertisseur statique et on clôture par une simulation de la machine
associée à un onduleur de tension.
I-2. Modélisation de la Machine
Asynchrone
La machine asynchrone, de part sa simplicité de
conception, a la faveur des industriels depuis son invention par NIKOLA
Tesla à la fin du siècle dernier, quand il découvrit
les champs magnétiques tournants engendrés par système de
courants polyphasés.
D'autre part, à la différence du moteur à
courant continu où il suffit de faire varier la tension d'alimentation
de l'induit pour faire varier la vitesse.
Une modélisation convenable permet de décrire
le comportement de la machine en régime statique et dynamique. A cet
effet nous avons choisit la modélisation de la machine asynchrone
triphasé à cage adaptée à la commande en tension en
utilisant la méthode de Park qui permet de transformer la machine
triphasé en machine biphasé équivalente.
Les équations obtenues peuvent alors êtres
écrites soit dans un repère fixe, ou mobile.
Ce système d'équation sera transcrit sous forme de
schéma-block de manière à être simulé
à l'aide du logiciel Simulink/Matlab. [1,2]
I-3. Hypothèses simplificatrices
La modélisation s'appuie sur un certain nombre
d'hypothèses [1, 2,3] :
· Une parfaite symétrie de la machine
· L'absence de saturation et de pertes dans un circuit
magnétique
· La répartition spatiale sinusoïdale des
différents champs magnétiques le long de l'entrefer.
I-4. Modélisation
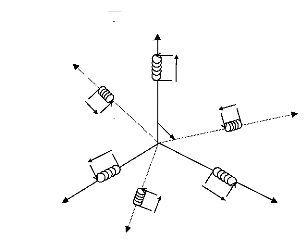
La machine asynchrone représentée par le
schéma de la figure (I-1) se compose :
· D'un circuit porté par le stator comportant trois
phases identiques décalées dans
l'espace faisant entre elles un angle égale à
2ð .
3
· D'un circuit rotorique mobile comportant trois phases
identiques en courts-circuits
vbr
Bs
décalées entre elles de
As
Cr
Cs
vcr icr
vcs
ics
ias
vas
è
ibr
var
Ar
iar
vbs
ibs
2ð .
3
Br
Fig. I-1. Représentation schématique de
la machine asynchrone
En désignant par :
- OAs, OBs, OCs : les axes des
trois phases statoriques
- OAr, OBr, OCr : les axes des
trois phases rotoriques.
- è = (OAs, OAr) : angle entre la phase d'axe A
du stator et la phase A du rotor.
I-5. Equations générales de la machine
asynchrone I-5-1. Equations électriques
Dans ces conditions, le fonctionnement électrique de la
machine est décrit par un système d'équations
[1,2,3,4].
· Pour le stator
d Ö
v R .i as
= +
as s as dt
(I-1)
d Ö
v R .i bs
= +
dt
bs s bs
d Ö
v R .i cs
= +
cs s cs dt
Sous forme matricielle :
v 0 0 i
as as
v
bs = 0 R s 0 i bs
v
cs 0 0 R s i cs
? Ö ?
d (I-2)
? as ?
+ ? Ö ?
bs
dt ? ?
? Ö cs ?
C'est à dire
[ s ] [ ] [ s ] dt [
s ]
d
(I-3)
v = R . . i + Ö
Tel que :
? v ? R 0 0 ?
? ?
i ?
? Ö ?
? as ? s as
? ? ? ? as ?
[ s ]
v = ? v ? ; [ R s ] = ; [ ]=
? 0 R 0 i ? i ? ; [ ÖS ]= Ö
? ?
s
bs s bsbs
? ? ? ? ? ? ?
? v ? 0 0 R s ?
cs ? ? i cs ? ? Ö cs ?
· Pour le rotor
d Ö
v R .i ar
=+
ar r ar dt
d Ö
(I-4)
v R .i br
= +
br
dt
r br
d Ö
v R .i cr
=+
cr r cr dt
Sous forme matricielle :
R 0 0
r
v
br = 0 Rr 0 i br
v
cr 0 0 Rr ? i cr
v
ar
? i
ar
? Ö ?
d (I-5)
? ar ?
+ ? Ö ?
br
dt ? ?
? Ö cr ?
C'est à dire :
(I-6)
[ s ] [ s ] [ s ] dt
[ s ]
d
v = R . . i + Ö
Tel que :
? v? ? ? ?
? i ?
? R 0 0 Ö
? ar ? r ?ar ? ? ar
?
? ?
[ ]=
v ? v ? ; [Rr]=0 R 0 ? ; [ ]=
? i ? i ? ; [ Ör ]= ? Ö ?
r
r br r br br
? ? ? ? ? ? ? ?
? v ? 0 0 R r ?
cr ? ? i cr ? ? Öcr?
En désignant par :

? i
? as
? i
? bs ? ? i
? cs
?
? ? iar
? ? ? ibr
? ? icr
3)
-
Ö
2ð
l m m
s s s
m. cos m. cos( 2 3) m. cos(
è è + ð è
as
m.
(I-7)
- ð è
2 3) m.cos
3)
cos( 2
è + ð
cos( è
Ö
bs
m m
Ö
cos( 2 3) m. cos(
è + ð è
- ð è
2 3) m.cos
s s
cs
m l m m.
s s s
l m.
s
v , b s
v , cs
v :les tensions appliquées aux trois phases du stator
as
i , bs
i , cs
i : les courants qui parcourent les enroulements statoriques
as
Ö , bs
Ö , cs
Ö : Les flux résultants à travers ces trois
phases
as
R: La résistance de chaque enroulement du stator et en
adoptant pour le rotor les mêmes notations
| 

