I-7-1. Modélisation de la Machine Asynchrone
alimentée en tension
Pour une machine asynchrone à cage alimentée en
tension, la forme la plus adaptée en représentation d'état
est :
X & = A.X + B.U Avec [ ]T
X = I ds I qs Ö dr Ö
qr (I-19)
On introduit le coefficient de dispersion donné par
l'équation suivante :
2
M
ó = 1 - (I-20)
L L
s r
? ? ? ? ?
A= ?
?
?
?
?
?
ë
- ù s
M
Tr
0
K
T
( )
ù - ù
s r
K
ù ù
s r

-
K
.
ë
ùr
1
0
-
Tr
M
-
Tr
( )
ù - ù
s r
-
Tr
?
K
. ?
?
?
?
r (I-21)
?
?
?
1 ?
?
r
T ?
U = V ds V qs (I-22)
[ ]T
1 0 00 ? T
|
B
|
ó L s
|
1
|
|
|
(I-23)
|
|
0
|
00
|
|
|
ó L s
|
??
|
|

M
R1
s
K
.
ë
,
L . + .L .L 2
ó .
L s .L
s
r
r
ó
ó
M2Rr
s r
L
T = ,
r
r R
I-8. Simulation
La simulation est devenu un moyen d'étude des
systèmes complexes dans le domaine des machines électriques. Elle
permet de décrire le fonctionnement de notre système (MAS) avec
une grande précision.
Plusieurs logiciels sont utilisés pour la simulation,
nous utilisons le logiciel (Simulink) dans l'environnement `'MATLAB», pour
la simulation de la machine asynchrone triphasé alimentée en
tension.
La résolution des équations différentielles
non linéaire est faite par la méthode de RangeKutta
d'ordre 4 (ode 45).
Le système d'équation (I-2 1) est mis sous forme
d'un schéma bloc représentant la machine dans le repère
lié au champ tournant (Fig.I-4)

12
Le système d'alimentation de tension est sinusoïdal
:
è
2ð
-
3
4ð
?
?
?
? ?
?
?
?
??
-
)
3
?
?
?
?
?
?
? ?
)
Va
Vb
V c
2.Ueff
cos
cos(è
cos(è
(I-24)
(I-26)
La transformation abc/áâ des tensions est
donnée par l'équation suivante :

V V
=
á a
1
(V V )
b c
-
V â
3
La transformation áâ/dq des tensions est
donnée par l'équation suivante :
?? ?? ?
- è è
sin cos
s s ? V â
? cos sin
è è ? ? V
s s á
L'analyse des variables de la machine asynchrone nécessite
une alimentation vue dans le repère d-q (Fig.I-5).
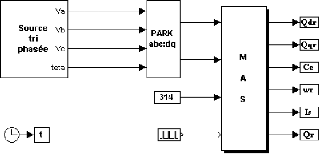
Fig I-5. Schéma bloc de la simulation de la
MAS alimentée en tension
I-8-1. Résultats de la simulation
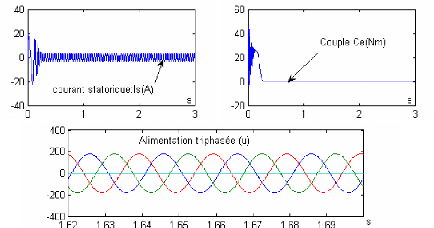
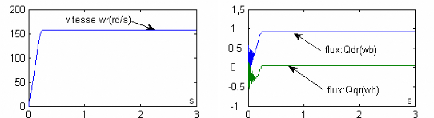
Fig I-6. Simulation de la MAS alimentée en
tension
Le courant, le couple et le flux présentent au
démarrage un régime oscillatoire amorti permettant à la
vitesse de passer par un régime transitoire.
I-9. Onduleur de tension
Les interrupteurs utilisés dans ces convertisseurs
(onduleur, cyclo-convertisseur) sont commandés de manière
à imposer une tension ou un courant alternatif dans les enroulements
statoriques de la machine suivant une loi de commande
(hystérésis, MLI) qui est fonction de la position du rotor de
manière à imposer le courant ou la tension en amplitude et en
phase.
Les onduleurs de tension alimentent les machines à courant
alternatif à partir d'une source de tension continu.

Ils permettent d'imposer aux bornes de la machine des tensions
d'amplitude et de fréquence réglable par la commande.
| 

