CHAPITRE II
COMMANDE VECTORIELLE
DE LA MACHINE ASYNCHRONE
CHAPITRE II: COMMANDE VECTORIELLE DE LA
MACHINE ASYNCHRONE
II-1. Introduction
Le but de ce chapitre est de présenter les principes
de base de la commande vectorielle par orientation du flux rotorique
alimentée en tension , qui permet d'obtenir le découplage entre
le couple et le flux ainsi qu'une réponse dynamique rapide afin
d'arriver à un bon régime statique. Ensuite on choisi les
correcteurs classiques et on termine notre chapitre par des simulations.
II-2. Théorie du flux orienté II-2-1.
Principe
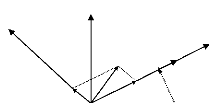
Le principe de la commande par orientation du flux consiste
à placer le repère (d,q) tournant tel que l'axe `d' coïncide
avec l'axe du vecteur flux.
A cet effet, le courant (Ids) contrôle le flux
et le courant (Iqs) contrôle le couple.
Or le couple est donné par.
|
C
e
|
3
2
|
p
|
M
sr
L
r
|
( Ö
dr
|
i
qs
|
-
|
Ö
qr
|
i
ds
|
)
|
Si le repère est parfaitement orienté, alors la
composante Ö qr = 0 et Ö dr = Ö r
L'avantage d'utiliser ce repère est d'avoir des grandeurs
constantes en régime permanent. d
Le modèle lié au champ tournant ( s
è ) ; donc le couple devient :
= ù
dt
|
C
e
|
3
2
|
p
|
M
sr
L
r
|
( Ö
r
|
.i )
qs
|
Le flux résultant Ö peut être soit :
%o Le flux statorique avec les conditions : Ö = Ö
ds= Ö s et Ö qs = 0
%o Le flux rotorique avec les conditions : Ö = Ö dr =
Ö r et Öqr = 0
%o Le flux d'entrefer avec les conditions : Ö = Ö dg =
Ög et Ö qg = 0
Remarque
Le contrôle du flux statorique ou d'entrefer n'assure
pas un découplage total, entre le couple et celui du flux [6,9,13] .Donc
notre objectif ici est d'étudier le principe de la commande vectorielle
avec orientation de l'axe `d' suivant l'axe du flux rotorique, car elle
présente de
meilleurs performances par rapport aux autres techniques
d'orientation [13], et elle permet aussi d'obtenir un couple de
démarrage important, mais nécessite une adaptation des
paramètres rotoriques.
ès
Iqs
Ids
Is
Ôr
â s
q
d
ás
Fig II-1. Principe de la commande
vectorielle
II-2-2. Orientation du flux rotorique
En imposant les conditions de l'orientation du flux rotorique :
( Ö = Ö dr= Ö r et Ö qr = 0)
et en développant les équations, on obtient de
l'équation d'état (I-19), Le modèle
réduit lié au champ tournant est défini par (II-1)
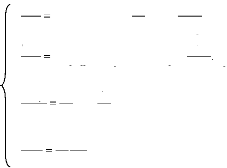
1
K
. Ö
dr
+
ó
v
ds
.
L
s
T
.
r
ù.
1
K.
Ö
dr
+
ó
.v
qs
L
s
r
.
ë .i
ds
-
i
qs
M
+ù +
.i
s qs
di
ds
dt
d Ö
dr
dt
M
T
r
1
-
T
r
i
ds
dè
sr
dt
T
r
Ö
r
-
.
i
ds
ù
s
- -
ë .i
qs
dt
di
qs
Ö
dr
(II. 1a)
(II. 1b)
(II. 1c) (II-1)
(II.1d)

(II.2a)
(II.2b)
(II-2)
3 pM
2JL
r
C
e
2
p
L
r
Ö
r
.i
qs
3M
f
C
r
r
-
-
J
Ö
r
Ù
r
.i
qs
J
d Ù
r =
dt
20
L'équation mécanique se réduit à :
On remarque que de l'équation (II-1c), le flux est
proportionnel àÇ. M
Ö = (II-3)
(p) I
1 pT
+
dr
r
ds
Ö (p) dr = M.I d s en régime permanent
Et de l'équation (II-2b), le couple est proportionnel a I
à condition que r
Ö est constant.
qs
Considérons le couple *
C e et le flux *
Ö r comme référence de commande,
nous inversons
les équations de r
Ö et e
C , on obtient :
*
? *
? d Ö ?
r ?
T . + Ö
ds r dt
M
? r ?
? ?
2.L C
qs
3.p.M
Ö
r
r e
i = .
*
(II-4)
Ces équations donne le principe de l'orientation du flux
rotorique (OFR), dont le schéma bloc est donné par la figure
(II-2) [14,15].
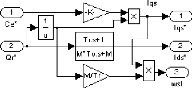
Fig II-2. Commande en courant par orientation du flux
rotorique.
|
Le filtre passe bas
|
|
1
|
permet de rendre les blocs physiquement réalisables.
|
|
1+
|
s.T0
|
II-3. Commande vectorielle indirecte et régulation
II-3-1. Introduction
La commande est dite indirecte lorsque la position du flux
considéré est calculée à partir de la mesure de la
vitesse du rotor et d'autres grandeurs accessibles, comme les tensions ou les
courants statoriques [12].
Ö r
Ce
Is
Ù

| 

