III.9.2.Paramétrisation des plateformes à
roues
Pour ce type de systèmes, l'aspect de configuration et
situation est moins évident que celui des chaînes
cinématiques ouvertes, car un système mobile ne contient pas
d'organe terminal OT à proprement dit, ayant comme fonction
l'interaction avec l'environnement, mais pour sa part, il est composé de
roues qui contribuent au mouvement du système.
Pour une plateforme mobile à roues évoluant sur un
sol lisse, le vecteur zrp du repère RP
est
normal à la surface d'évolution de la
plateforme. Nous partirons de l'hypothèse que les bases mobiles à
étudier doivent avoir au moins 3 roues, qui sont nécessaires pour
la locomotion et l'équilibre d'un tel système.
Grâce à leur particularités, les robots
mobiles à roue peuvent se mouvoir dans des espaces assez importants, ils
sont aussi aptes à s'orienter ; alors, la situation (expression plus
favorable à « coordonnées opérationnelles ») de
ce type de systèmes est complètement décrite par deux
paramètres de positions et un d'orientation. Elle est donc
définie sur un espace noté EOP de dimension
u égale à 3. Soit RP(Op,x
p , y p )
r r le repère mobile lié à la plateforme
tel que zr et
|
r
zP
|
soient colinéaires ; les paramètres XP et
YP, coordonnées du point OP (origine du repère
RP
|
dans RA) et á (angle se trouvant entre
les axes xr et xrp) forment ainsi les
composantes du vecteur Ap= [XP YP
á]T situation du véhicule mobile.
Le choix du point OP est libre, mais (d'après
Campion [Pad05]), il peut être fait judicieusement en fonction du type de
plateforme mobile à roue envisagée.
Dans le cas d'un véhicule de type voiture, le choix est
illustré par la représentation en fig.III.3 d'après
[Pad05]:
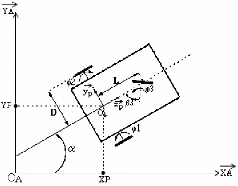
Fig III.3 : Paramétrisation d'une plateforme
mobile de type voiture
La configuration d'une plateforme mobile à roues est
connue lorsque sa situation dans le repère RA est connue, et
que la configuration de chacune de ses roues est connue ; la formulation de
cette configuration est étroitement liée à la
catégorie à laquelle appartient la roue.
Les coordonnées généralisées pour
une plateforme à roue sont alors complètement décrites,
sur un espace EP, par un vecteur de dimension np
dépendant du nombre et du type de roues considérées.
Les roues existantes pour la plateforme à étudier
sont :
Une roue centrée orientable, placée sur l'axe
longitudinal du véhicule et deux roues fixes se trouvant sur le
même axe à l'arrière (les roues sont
numérotées), où â3 désigne
l'orientation de la roue directrice avant, ?1 , ?2 et
?3 représente quand à elles, les angles de rotation des
roues droite, gauche, et de la roue directrice, ce qui donnera ? =
[?1 ?2 ?3]T.
La configuration du système mobile est alors :
1
?
?
?
?
?
?
á ?
J
q p
?
?
?
?
A p
â3
? 1
?
?
J
â3
?1
? 2
?3
Xp
Yp
Le tableau ci-dessous présente les paramètres
liés aux roues considérées en nous referant au tableau
présenté au chapitre I (paragraphe I.3.1) [Bay01]
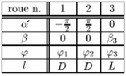
Tab.III.1 : Paramètres des roues de la
plateforme de type voiture
Les véhicules mobiles sont des systèmes
mécaniques caractérisés par l'existence de contraintes
cinématiques non holonomes, lesquelles sont une conséquence de
l'hypothèse de roulement sans glissement de leurs roues sur le sol,
habituellement adoptée pour la modélisation du contact roue/sol,
c'est la raison pour laquelle nous allons expliciter dans notre exemple cette
notion.
Les conditions de r.s.g des roues sur le sol conduisent donc
à une vitesse du point OP, portée
sur l'axe
xrp , en considérant v comme la vitesse
longitudinale de la plateforme et ù sa vitesse
angulaire, on a :
v= x&.Cos(á)+ y
& . Sin ( á ) (3.8)
ù=á& (3.9)
Comme il a été expliqué
précédemment, pour représenter les contraintes de
roulement sans glissement des roues sur le sol, il faut exprimer la
nullité des vitesses des différentes roues :
· Roues fixes droites et gauches
La nullité des vitesses dans les plans verticaux
perpendiculaires aux roues :
? r - ? 1
R
T ( ) 0
á A p =
0 1 0
L J
0 1 0
Sachant que R(á) représente la
matrice de rotation du système mobile, il résultera de
l'équation l'expression suivante :
& xSin(á)+ &yCos(á)
=0 (3.10)
On peut combiner les trois expressions précédentes
(3.8), (3.9), (3.10) pour avoir :
|
r i r + i
v xCos( ) ySin( )
& &
á á
? ? ? ?
0 xSin( ) yCos( )
= +
& &
á á
? ? ? ?
? ? ? J ? ? ? J
ù á &
|
=RT(á)A& p (3.11)
|
La nullité des vitesses dans les plans verticaux des roues
s'écrit alors (d'après l'équation (3.6)) :
v+Dù+r?&1 =0
-v+Dù+r?&2 =0
|
En combinant ces deux expressions en forme de matrices, on aura
:
? 1 r 1 r 1
1 0 0
D r ? & 1
? ? + ? ? ? ? =
R A
T ( ) 0
á
1 0 0
D r
p
?- ? L ? ? ?
? & 2
|
(3.12)
|
· Roue centrée orientable
La nullité des vitesses dans le plan vertical
perpendiculaire à la roue :
[Cos(â3)
Sin(â3) L Sin(â3)]
RT(á)A& p =0 (3.13)
La vitesse exprimée dans le plan vertical de la roue est
:
[-Sin(â3) *
LCos(â3)] RT(á) A& p
+r?& 3=0 (3.14)
Où * représente une valeur quelconque
Les contraintes de roulement sans glissement seront
présentées en réunissant les différentes
équations précédentes (3.11), (3.12), (3.13), (3.14)
J1(â3)RT(á)A&
p +J2?& =0 (3.15)
C1(â3)RT(á)
A& p =0 (3.16)
Avec :
? 1
1 0 D
J1( 3) 1 0 D
? ?
â = -
?
? ?- ? ?
Sin( 3) * LCos( 3)
â â
? 1
r 0 0
(3.18)
(3.17) , J2 0 r 0
? ?
= ? ?
? ? ? ]
0 0 r
? -
0 1 0 1
?
C1( 3) 0 1 0
?
â = ? ?
? ?
? Cos( 3) Sin( 3) LSin( 3)
â â â ?
(3.19)
Une plateforme mobile ne peut pas être
modélisée géométriquement, car, dans ce cas, sa
situation peut être quelconque dans le repère de
référence RA ; cela rend donc cet aspect peu
intéressant, c'est la raison pour laquelle nous entamerons directement
le modèle cinématique de notre plateforme.
· Modèle cinématique
Avant d'entamer la mise en oeuvre du modèle
cinématique, nous devons connaître le degrés de
mobilité du système mobile, il sera calculé relativement
au rang de la matrice
C1(â3).
Nous pouvons déjà remarquer de l'expression
(3.16) que RT(á) A& p doit
appartenir au noyau de
C1(â3), et de ce fait, sa dimension
dim(Ker(C1(â3))) est égale à 1, ce qui
représente le degré de
mobilité du système
mobile. Nous devons donc calculer une base ayant comme dimension
Ddmp
x3, elle peut être égale à [-LSin(â3) 0
Cos(â3)]T d'après [Bay01] ou encore
[Sin(â3) 0
- Cos(â2 ) T
' ] ' d'après [Pad05].
L
Donc, toujours d'après (3.16), le modèle
cinématique en situation d'une plateforme mobile de type voiture doit
être calculé selon le type de noyau choisi tel que :

Cos(á
[
- LCos(á
)Sin(â3 )
&
)Sin(â3 )
- LSin(á
(3.21)
Sin(á )Sin(â
3
)
Ap
Ap
Cos(â3)
Cos(
â3
)
J
1
)Sin(â3 )_,
L
(3.20) ou
Le modèle cinématique en situation de la
plateforme mobile relie la dérivée de la situation de la
plateforme à çp (commande de mobilité
de notre système mobile), avec çp vecteur
ayant comme dimension Ddmpx1 (Ddm, étant le
degré de mobilité du système).
Dans l'expression (3.20) et (3.21),
çp correspond à la vitesse linéaire de
la roue centrée orientable dont la direction est perpendiculaire
à l'axe de la roue, cette vitesse linéaire est égale
à vP= r.
?&3
On note que les composantes du vecteur
)1p sont toutes liées au paramètres
çp, pour ce qui est
de â3, c'est une entité qui a la
capacité de varier librement, c'est pour cela qu'elle va être
considérée lors de la mise en oeuvre du modèle
cinématique en configuration du robot mobile comme suit :

(3.22)
r-
1 1
1
J

Cos(63 :in:)) 01
1
ouD Cos(6
r
- L )
3
3 ))

1 Lr 000 r L 0 Co-s( Cao
L3r1s)03(a+)63)


3 0 00â3i
3 3

0 00 7p:11
Sin(a oins(a)36; )
0

0 1JJ


(LSin
6 a

r
3)-DCos
(fl
&
?1
&
?2
&
?3
&
X
p
&
Y
p
&
a
&
63
?
?
1 ? ? ? ? ? ?
J
L
&
qp
3(LSin
(J
3)+DCos
6a
))3LCos(aCos(6-LSin(aSin(
(J
(fl

Cos


)01Mat1))
))
((

1D


Mat2
Nous avons pu remarquer que le modèle cinématique
en configuration lie la dérivée de la
configuration du système mobile au vecteur de commandes ?
ç p â 3
& T , appliqué à la
? ?
plateforme mobile, il est de dimension 2. En d'autres termes,
nous pouvons déduire qu'il nous faut deux moteurs pour pouvoir commander
le mouvement d'un tel système, cela fait apparaître la
nécessité de motoriser l'orientation de la roue orientable.
Le choix du type de modèle cinématique (en
configuration ou en situation) pour un système mobile influe sur le
résultat de la modélisation des manipulateurs mobiles.
Nous avons remarqué que le modèle
cinématique du bras est mis en oeuvre en prenant en considération
seulement ses caractéristiques propres (type de liaison
qb1 et qb2 et longueur des segments
a1 et a2). Pour un robot mobile, nous avons constaté que son
modèle cinématique était plus délicat à
mettre en oeuvre, et n'était pas aussi systématique, cela est
dû aux contraintes de roulement sans glissement des roues sur le sol qui
sont calculées selon le type de roue à traiter.
Les calculs du degré de mobilité des plateformes
mobiles à roues ont été présentés en
détails dans [Pad05] et [Bay01].
Nous allons dans ce qui suit passer à l'étude des
manipulateurs mobiles à roues.
| 

