|
Année Académique 2007/2008
APPROCHE DE RÉSOLUTION
PAR
RÉGULARISATION DES PROBLÈMES DE
PROGRAMMATION
MATHÉMATIQUE À DEUX
NIVEAUX DANS LE CAS DE LA NON
UNICITÉ DE
LA SOLUTION DE LA SOLUTION DU PROBLÈME
DU
SUIVEUR.
MÉMOIRE
Présenté et soutenu en vue de l'obtention du
Diplôme d'Études Approfondies (D.E.A.) Option : ANALYSE
NUMÉRIQUE
Par :
FOUODJI DEDZO FRANCISQUE
Matricule 02W026
Sous la direction de :
PAULINE LAURE FOTSO Maître de Conférence
Dédicaces
Je dédie ce travail
? A mon père,
? A ma mère,
? A la famille Tsapi,
? A mes frères et soeurs.
Mémoire de DEA * Laboratoire
d'analyse numérique * UYI Francisque.D.Fouodji
c~UYI 2007-2008
Mémoire de DEA *
Laboratoire d'analyse numérique *
UYI Francisque.D.Fouodji c~UYI 2007-2008
Remerciements
Ce travail n'aurait pu être réalisé sans
le concours, le soutien et les encouragements de plusieurs personnes que je
tiens à remercier particulièrement. Il s'agit de :
? Professeur Pauline Laure Fotso, qui malgré ses
nombreuses occupations à accepté d'encadrer ce travail, et ainsi
guider mes pas dans ce premier travail de recherche;
? mr Calixte.O.Pieume, dont la disponibilité infinie et
les conseils avisés m'ont permis d'éviter bien
d'écueils;
? le Dr Guy Merlin Mbakop, qui m'a ouvert
généreusement sa bibliothèque personnelle;
? les enseignants du département de
mathématiques de l'université de Yaoundé I et de
l'école normale supérieure de Yaoundé, à qui je
doit la majeure partie de mes connaissances en mathématiques;
? mon père Mr Dedzo André et ma mère Mme
Kamené Marie, qui m'ont transmis le goût de l'effort, et qui n'ont
jamais cessé de m'apporter leurs support tant matériel que
psychologique;
? les familles Tsapi, Nzangué et Zietchou, pour leur
aide matérielle et leur encouragements;
? mes frères aînées Theophile, Merlin et
Gustave, qui ont été mes guides éclairés durant mes
premières années d'université et dont l'apport à ma
formation universitaire et intellectuelle ne saurait être
quantifié.
? mes camarades de promotion: Daoussa Daniel, Tchouaké
Hervé, Kenfac Brice, Ngongang Eric, Ekwadi cyrille, Moualeu Dany, Batkam
cyrille, Kenmogne Marcelin;
? mes amis Chassep Joel, Tagne Takam Cyrille, Mbah .N.Serge,
Tewa Jean Claude, Meta-gheu Gisèle, Pokouo Sandrine, Tagne.K.Steve
william;
? tous ceux que je n'ai pas cité ici et qui m'ont
apporté leur aide durant ce travail.
Mémoire de DEA * Laboratoire
d'analyse numérique * UYI
Francisque.D.Fouodji c~UYI 2007-2008
Table des matières
Dédicaces i
Remerciements ii
Table des matières iv
Table des figures v
Résumé vi
Abstract vii
Introduction générale viii
|
1
|
Genéralités sur la programmation
mathématique à deux
niveaux
|
1
|
|
1.1
|
Formulation générale des PBN
|
2
|
|
|
1.1.1 Définition et présentation
|
2
|
|
1.2
|
Quelques propriétés des PBN
|
3
|
|
1.3
|
Quelques résultats d'optimisation paramétrique
|
6
|
|
1.4
|
Conditions d'optimalités
|
12
|
|
|
1.4.1 Cas des PBN linéaires
|
12
|
|
|
1.4.2 Cas général
|
13
|
|
1.5
|
Algorithmes et méthodes de résolution des PBN
|
14
|
|
|
1.5.1 Algorithme de descente
|
14
|
|
|
1.5.2 L'algorithme du paquet
|
15
|
|
1.6
|
Les applications de la PBN
|
16
|
|
|
1.6.1 Production agricole , production de biocarburant
|
16
|
|
|
1.6.2 Le problème principal-agent [10]
18
|
|
|
2
|
Non unicité de la solution du problème
du suiveur : les différentes
techniques
|
|
|
d'approches.
|
20
|
|
2.1
|
Position du problème
|
21
|
|
2.2
|
L'approche optimiste
|
22
|
|
2.3
|
L'approche pessimiste
|
24
|
TABLE DES MATIÈRES iv
Mémoire de DEA * Laboratoire
d'analyse numérique * UYI Francisque.D.Fouodji
c~UYI 2007-2008
3 Approche de résolution par
régularisation des PBN dans le cas de la non
unicité. 30
3.1 La
régularisation de Tykhonov ............................ 30 3.2
régularisation par l'élément de plus petite norme
.................. 37
3.2.1 première méthode
............................... 37
3.2.2 Deuxième méthode
.............................. 41
3.3 Algorithme de résolution d'un PBN dans le cas de la
non unicité ......... 43
3.3.1 La methode du paquet ............................ 43
3.3.2 Présentation de l'algorithme
......................... 44
3.4 Convergence de l'algorithme du paquet
modifié ................... 47
Conclusion et perspectives 50
Bibliographie 51
Mémoire de DEA * Laboratoire
d'analyse numérique * UYI Francisque.D.Fouodji
c~UYI 2007-2008
Table des figures
1.1 Sur les effets du transfert de la contrainte x
= 0 du premier niveau dans (BLP1)
au second niveau dans (BLP2).
........................... 4
1.2 Sur l'importance de l'ordre du jeu
.......................... 5
2.1 Sur les difficultés rencontrées dans le cas
de la non unicité ............ 22
2.2 Fonction objectif du leader ..............................
27
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji
c~UYI 2007-2008
Résumé
Les approches classiques de résolution des PBN
(Problème de programmation mathématique à deux-niveaux)
dans le cas de la non unicité de la solution du problème du
suiveur qui sont : l'approche optimiste et l'approche pessimiste
présentent de nombreux défauts. Parmi lesquels le problème
d'instabilité des solutions optimiste et pessimiste ainsi que celui de
leurs l'éloignement, par rapport à la solution réelle du
problème [11]. Dans ce document, nous présentons une approche de
résolution des PBN dans le cas de la non unicité qui permet de
contourner ces défauts : l'approche de résolution par
régularisation des problèmes de programmation à
deux-niveaux dans le cas de la non unicité de la solution du
problème du suiveur. Cette méthode consiste à introduire
dans le problème du suiveur un paramètre (le paramètre de
régularisation) de sorte que le nouveau problème du suiveur (le
problème du suiveur régularisé) admette une solution
unique fortement stable. Lorsque le paramètre de régularisation
tend vers zero, la solution du problème régularisé
converge vers une approximation de la solution du problème original qui
présente de meilleures propriétés de
régularité que les solutions obtenues par les approches
classiques (approches optimiste et pessimiste) de résolution des PBN de
ce type. Nous présentons également un algorithme de S.Dempe issu
de cette approche, dont nous étudions la convergence
théorique.
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji
c~UYI 2007-2008
Abstract
Optimistic and pessimistic approaches are classical methods
uses for solving bilevel programming problems with non-unique lower level
solutions. But, both the optimistic and pessimistic solutions can in general
not be assumed to be good approximations of realized solutions in practice, and
small changes in the problem data can result in drastic changes of theses
solutions [11]. We present in this document an approach which circumvents these
difficulties : the regularization approach for solving bilevel problems with
non-unique lower level solutions. This approach consists (in general) of
introducing a regularization parameter in the lower level problem such that the
new problem (regularized problem) has a unique lower level solution which is
strongly stable. This solution converges (when the regularization parameter
converges to zero) to an approximation of the original problem which is more
regular (and even better) than optimistic and pessimistic solutions
respectively. We present also an algorithm by S.Dempe resulting from
regularization approach and show the convergence of this algorithm.
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji
c~UYI 2007-2008
Introduction générale
Les Hommes recherchent en général ce qu'il y'a
de meilleur, et lorsqu'ils sont face à un problème de prise de
décision, tous voudraient prendre la décision optimale.
Un des traits caractéristiques de notre époque
est l'intérêt croissant porté aux problèmes de
planification économique, de gestion, et de contrôle de
systèmes. Comme jamais dans l'histoire, on ressent de nos jours la
nécessité d'une gestion fructueuse et efficace des ressources
naturelles et humaines, des moyens matériels et techniques.
Ainsi se pose le besoin de disposer d'outils objectifs
susceptibles d'aider à prendre face à un problème, la
meilleure décision.
Le domaine des mathématiques qui permet de
modéliser les processus de prise de décision est la programmation
mathématique. Au fil du temps et en fonction des besoins, se sont
développées la programmation linéaire (PL), la
programmation non linéaire (PNL), la programmation multiobjectif (POM)
et la programmation à deux-niveaux.
La PL et la PNL permettent de modéliser des processus
de prise de décisions dans les systèmes centralisés;
c'est-à-dire dans les systèmes où un seul décideur
est préoccupé par l'optimisation d'une fonction objectif soumise
à des contraintes éventuelles. La POM quant à elle permet
d'aborder les problèmes d'optimisation dans lesquels le décideur
voudrait atteindre plusieurs objectifs simultanément.
Pour ce qui est de la programmation à deux-niveaux
(PBN), elle permet de modéliser des processus de prises de
décision dans un système décentralisé. Ici, deux
décideurs ne pouvant agir indépendamment l'un de l'autre, mais
suivant une certaine hiérarchie, souhaitent prendre chacun la meilleure
décision par rapport à des objectifs généralement
différents. La stratégie choisie par l'un des décideurs
(le leader ou décideur du premier niveau) influence la fonction objectif
et/ou la région réalisable de l'autre (le suiveur ou
décideur du second niveau). Par conséquent, la décision de
ce dernier est fortement liée à celle du leader. Ainsi un PBN est
constitué de deux problèmes d'optimisation qu'on ne peux
résoudre séparément.
La PBN suscite depuis quelques décennies
déjà un grand intérêt dans la communauté de
la programmation mathématique; ceci grace à ses nombreuses
applications en économie, en ingénierie et dans plusieurs autres
domaines des sciences.
La plupart des méthodes de résolution des PBN
développées dans la littérature suppose au
préalable que le problème du second niveau admet une solution
unique; ceci dans le but de transformer le PBN en un problème
d'optimisation à un niveau classique. Mais il se trouve que la
majorité des problèmes modélisés sous forme de PBN
sont tels que le problème du suiveur n'admet pas une solution unique
[11].
C'est pourquoi la recherche depuis plus d'une décennie
déjà, est tournée vers la résolution des PBN dans
le cas de la non unicité de la solution du problème du second
niveau.
Notre travail consiste à présenter une approche
de résolution des PBN qui fait actuellement l'objet de recherches
profondes : l'approche de résolution par régularisation des PBN
dans le
TABLE DES FIGURES 0
Mémoire de DEA * Laboratoire
d'analyse numérique * UYI Francisque.D.Fouodji
c~UYI 2007-2008
cas de la non unicité de la solution du problème du
suiveur.
Ce travail est organisé ainsi qu'il suit :
? au chapitre un, nous
présentons les généralités sur la PBN dans le cas
de l'unicité de la solution du problème du second plan;
? au chapitre deux nous
présentons les différentes techniques d'approches des PBN dans le
cas de la non unicité;
? enfin au chapitre trois nous
présentons l'approche par régularisation, ainsi qu'un algorithme
de résolution basé sur cette approche développé par
S.Dempe, dont nous étudions la convergence.
CHAPITRE PREMIER
Genéralités sur la programmation
mathématique à deux niveaux
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji
c~UYI 2007-2008
Introduction
La programmation mathématique à deux niveaux
(PBN) est une branche de la programmation mathématique qui résoud
des problèmes ayant une structure hiérarchique constituée
de deux unités indépendantes de prise de décision. Chaque
unité de la hiérarchie souhaite minimiser (ou maximiser) sa
fonction objectif, en tenant compte du contrôle partiel exercé
à l'autre niveau de prise de décision. La PBN modélise des
problèmes de prise de décision qui exigent des compromis parmi
les objectifs de deux individus ou entités qui interagissent. Un
décideur se voit assigner le rôle de meneur (ou leader ou
décideur du premier plan) et prend sa décision en fonction de la
(ou des) décision(s) éventuelle(s) d'un décideur de second
plan appelé suiveur. La première utilisation d'un modèle
hiérarchique date de 1934 et a été faite
par H.V Stackelberg [2] dans une monographie sur l'économie de
marché, pour décrire la situation de plusieurs décideurs
qui veulent réaliser leurs objectifs respectifs mais ne peuvent le faire
indépendamment les uns des autres. Cependant les toutes premières
formulations liées aux PBN proprement dit sont l'oeuvre d'auteurs tels
que Kornaj et Liptack [3] en 1965, Ross [4], Simaan et Cruz [5] ou Bracken et
McGill [6]. Toutefois, Candler et Norton [7, 8] furent les premiers à
utiliser la terminologie programmation à deux niveaux
ou à plusieurs niveaux dans un rapport de la banque mondiale.
C'est finalement au début des années 1980 que, vu ses
applications dans la résolution d'une multitude de problèmes
concrets (problèmes de gestion, de planification économique, de
contrôle de systèmes, de chimie, de sciences
environnementales,....), la PBN a commencé à susciter une
attention particulière. Motivés par la théorie des jeux de
H.V Sta-ckelberg [2], plusieurs auteurs se sont lancés dans
l'étude de la PBN; ce qui a permis son essor dans la communauté
de la programmation mathématique.
Dans ce chapitre, après avoir donné une
présentation générale et quelques propriétés
des PBN, nous présenterons des résultats d'optimisation
paramétrique généralement utilisés pour leur
résolution. Ensuite, nous donnerons quelques conditions sous lesquelles
les PBN admettent des solutions dans le cas de l'unicité de la solution
du problème du suiveur; ce qui nous permettra de présenter des
algorithmes développés afin de construire de manière
effective ces solutions. Nous terminerons en donnant quelques unes des
nombreuses applications de la PBN.
Genéralités sur la programmation
mathématique à deux niveaux 2
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji
c~UYI 2007-2008
1.1 Formulation générale des PBN
1.1.1 Définition et présentation
Un problème de programmation mathématique à
deux niveaux peut être défini comme un problème
d'optimisation dont l'une des contraintes est un autre problème
d'optimisation. La formulation générale d'un PBN est la suivante
:
|
min F(x,y)
|
(1.1)
|
|
y
|
|
|
sujet à : G(x,y) = 0
|
(1.2)
|
|
min f(x,y)
x
|
(1.3)
|
|
sujet à : g(x,y) = 0
|
(1.4)
|
La fonction F : Rn
× Rm -? R ;
n, in ? N représente la fonction objectif du leader tandis que
la fonction f : Rn ×
Rm -? R ; n, in ? N
représente celle du suiveur.
Les fonctions G : Rn
×Rm -?
Rp et g : Rn
×Rm -?
Rq sont respectivement les contraintes du
problème du leader et du problème du suiveur.
Le leader est le décideur qui à la
possibilité de prendre une décision sans tenir compte des
opinions d'autres décideurs que lui. Mais étant donné
(comme c'est le cas dans plusieurs problèmes d'optimisations concret)
que la possibilité de prendre une décision optimale (i.e celle
qui minimise sa fonction objectif) ne dépend pas uniquement de sa
personne, le leader se voit contraint de prendre en compte les réactions
d'un autre décideur qu'on appelle le suiveur.
les vecteurs x et y qui apparaissent dans le
problème (1.1) - (1.4) sont respectivement appelés variable du
problème du suiveur et variable du problème du leader.
La structure hiérarchique du problème (1.1) -
(1.4) suggère que le problème du leader (1.1) - (1.2) ne peut
être résolu si l'on ne connaît pas la (ou les ) solutions du
problème du suiveur (1.3) - (1.4); ce qui permet de définir une
autre formulation du PBN comme suit :
|
«min
y
|
{ }
» F (x, y) : G(x, y) = 0 et x ? (y)
(1.5)
|
avec pour y fixé dans Rm
:
{ }
(y) := Argmin f(x, y) : g(x, y) = 0
(1.6)
x
(y) représente l'ensemble des solutions du
problème d'optimisation paramétrique (1.3) - (1.4). Les
guillemets dans (1.5) expriment l'incertitude de la définition du PBN
dans le cas où (y) n'est pas réduit à un
singleton ( non unicité de la solution du problème du suiveur) La
formulation (1.5) - (1.6) est celle que nous utiliserons tout au long de cet
exposé.
Pour y fixé dans Rm
, l'ensemble M(y) := {x ?
Rn : g(x, y) = 0}
représente l'ensemble des
décisions admissibles du suiveur ( ou encore la
région réalisable du suiveur ).
{ }
L'ensemble R := (x, y) ? Rn
× Rm : G(x,
y) = 0 et x ? (y)est la région réalisable
du
leader.
Le PBN peut encore se mettre sous la forme :
Définissons à présent ce qu'on entend par
solution d'un PBN
Genéralités sur la programmation
mathématique à deux niveaux 3
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
n o
Définition 1.1.1. On considère le problème
(1.5) - (1.6) On pose Y = y E 1[8m :
G(y) < 0 .
On suppose que Ø(y) est réduit à un
singleton pour tout y E Y .
Un point (x*, y*) E 1[8n
x 1[8m est appelé solution optimale locale du
problème (1.5) - (1.6) si y* E Y, x*
E Ø(y*) et il existe une boule ouverte
centrée en y*
(Uä(y*), 8 > 0) avec
F(x, y) > F(x*,
y*) pour tout (x, y) satisfaisant y E Y
n Uä(y*) , x E
Ø(y).
(x*, y*) est solution optimale
globale si 8 = oo.
Remarques 1.1.1.
1) Si le problème (1.3) - (1.4) admet une solution
unique x(y) pour chaque paramètre y
vérifiant les contraintes du leader, alors sous des
hypothèses de régularité sur les fonctions contraintes du
second plan [ 9,10 ], la fonction
x : 1[8m -? 1[8n y H
x(y)
est continue. avec {x(y)} =
Ø(y) .
2) Si le problème (1.3) - (1.4) n'admet pas une
solution unique pour tout paramètre y vérifiant les
contraintes du premier niveau, alors le leader se trouve face à un
dilemme [11] en ce sens que même s'il connaît sa région
réalisable, il ne sait pas quelle sera la décision du suiveur.
L'analyse des différentes approches permettant d'attaquer (1.1) - (1.4)
dans ce cas de figure fera l'objet du chapitre suivant.
3) Les contraintes du leader sont dites couplées
lorsque la fonction contrainte du premier niveau G dépend
effectivement de la variable x contrôlée par le suiveur.
Rechercher les solutions réalisables qui vérifient ces
contraintes en étant compatibles avec la reaction du suiveur est aussi
difficile que la résolution du PBN lui même [10].
Nous allons maintenant présenter quelques
propriétés caractéristiques des PBN :
1.2 Quelques propriétés des PBN
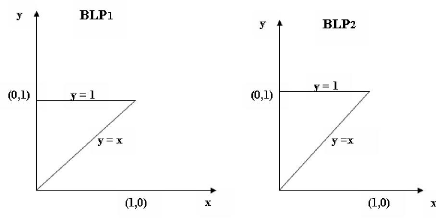
Propriété 1.2.1. Dans la formulation du PBN
(1.1) - (1.4), la position des fonctions contraintes n'est pas arbitraire. En
effet, en transférant les contraintes du leader au problème du
suiveur, la région réalisable de celui-ci s'en trouve
réduite (ou restreinte) ; ce qui peut modifier la solution (si elle
existe ) du problème du suiveur, et partant la solution du
problème (1.1) - (1.4). Il en est de même si on transfère
plutôt les contraintes du suiveur au problème du leader. Nous
illustrons cette propriété par cet exemple tiré de [13]
:
On considère le PBN linéaire :
(BLP1) :
max
y
y
sujet à : 0 < y < 1
{w:w<y}
x = 0
x E Argmax
w
|
et le problème : (BLP2) :
|
max
y
|
y
|
Genéralités sur la programmation
mathématique à deux niveaux 4
sujet à : 0 < y < 1
|
x E Argmax
w
|
{w : w <
y et w = 0}
|
Les problèmes (BLP1) et
(BLP2) ont les mêmes contraintes excepté
le fait que la contrainte du premier niveau dans
(BLP1) est transféré au deuxième
niveau dans (BLP2).
Comme le montre la figure ci-dessous, les deux problèmes
ont une même région réalisable.
Mémoire de DEA * Laboratoire
d'analyse numérique * UYI Francisque.D.Fouodji
c~UYI 2007-2008
FIG. 1.1 Sur les effets du transfert de la contrainte
x = 0 du premier niveau dans
(BLP1) au second niveau dans
(BLP2).
{ }
On a 1 = (0, y) : 0 <
y < 1
pour les deux problèmes; mais pour y
fixé dans R, on a pour (BLP1) :
Ø(y) = {y} tandis
que (
{0} si y = 0
pour (BLP2) :
Ø(y) = w sinon .
Il s'ensuit que pour (BLP1) la seule
solution réalisable et qui s'avère être la solution
optimale est y = 0. La solution optimale pour
(BLP2) est y = 1.
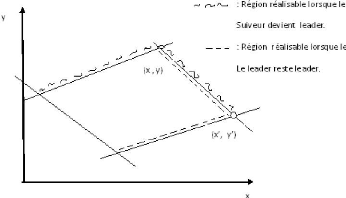
Propriété 1.2.2. La solution optimale du PBN
change en général lorsque l'ordre du jeu
est changé (i.e lorsque le problème du
leader est décalé au second plan tandis que le suiveur devient le
leader). Ceci est dû au fait que le problème étant
hiérarchique, les deux décideurs ne peuvent prendre leurs
décisions simultanément; ce qui signifie que le leader se doit
d'anticiper sur le choix du suiveur sous réserve que celui-ci à
le droit et la possibilité de choisir une solution optimale sous les
conditions posées par les choix du leader [11]. Nous illustrons cet
exemple par la figure 1.2 tirée de [11], sur laquelle
(x, y) et
(x',
y') représente respectivement la
solution
Genéralités sur la programmation
mathématique à deux niveaux 5
Mémoire de DEA * Laboratoire
d'analyse numérique * UYI Francisque.D.Fouodji
c~UYI 2007-2008
FIG. 1.2 Sur l'importance de l'ordre du jeu
optimale lorsque le ieme
décideur à le premier choix.
Propriété 1.2.3. La solution
optimale d'un PBN n'est pas en général indépendante
des
{ }
min (x - 1)2
+ (y - 1)2 :
x E Ø(y) .
y
contraintes inactives ajoutées au problème du
suiveur. L'exemple suivant tiré de [14] illustre bien cette
propriété :
Soit le PBN :
{ }
avec Ø(y) =
Argmin 0.5x2
+ 500x - 50xy .
x
{ }
. Ce problème est équivalent à :
min (x-1)2
+(y -1)2 :
x+500-50y = 0 . La
solution
x, y
unique de ce problème est
(x*, y*)
= (0.82; 10.02) et la valeur
optimale de la fonction objectif est
F(x*, y*)
= 81.33.
Ajoutons la contrainte x ~ 0 au
problème du suiveur; alors
(x*, y*)
est un point réalisable pour le problème et
x* ~ 0; mais la solution optimale
du suiveur est :
1
50y - 500 si y
~ 0
En introduisant cette fonction dans fonction objectif du
leader, on a :
1
(50y - 501)2
+ (y - 1)2 si y
~ 0
F (x(y),
y) =
x(y) = 1 + (y -
1)2 si y ~ 10
.
1 + (y - 1)2 si
y ~ 10
La valeur minimale de cette fonction est 1
et est atteinte en (x°,
y°) = (0, 1). Une
condition nécessaire et suffisante garantissant au PBN l'existence d'une
solution optimale globale indépendante par ajout ou suppression de
contraintes inactive peut-être trouvé dans [14].
Genéralités sur la programmation
mathématique à deux niveaux 6
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
Dans toute la suite, nous ne considérerons que les PBN
dans lesquels les contraintes du leader ne sont pas couplées ; i.e la
fonction contrainte du leader ne dépend pas de la variable du
problème du suiveur. Ainsi les contraintes du leader s'écriront :
G(y) < 0 au lieu de G(x, y) < 0.
Dans le but de prendre en compte les contraintes du type
égalité, les contraintes du deuxième plan seront
désormais de la forme g(x, y) < 0 et
h(x, y) = 0 où h : 1[8n x
1[8m -> 1[8k
le problème (1.1) - (1.4) devient donc :
{ }
min F(x, y) : G(y) <
0, x E Ø(y) . (1.7)
y
|
avec Ø(y) = Argmin
x
|
{ }
f(x, y) : g(x, y) < 0 et
h(x, y) = 0 .
|
Ø(y) représente l'ensemble des solutions
du problème d'optimisation paramétrique :
{ }
min f(x, y) : g(x, y) < 0
et h(x, y) = 0 . (1.8)
x
comme nous l'avons indiqué précédemment,
la résolution de (1.7) - (1.8) suppose la résolution au
préalable du problème d'optimisation paramétrique que
constitue le problème du suiveur (1.8). Par ailleurs, la plupart des
méthodes de résolution des PBN exploitent des conditions
nécessaires et suffisantes permettant de montrer l'équivalence du
PBN à un problème d'optimisation à un niveau classique de
la forme :
|
min
y
|
{F(x(y),y). : G(y)
< 0}. (1.9)
|
Où x(y) représente la solution
de (1.8) pour le paramètre y. La résolution de (1.9)
nécessite outre la régularité des fonctions F et
G, la continuité au moins de la fonction à valeur
optimale x : y i-> x(y). Ainsi donc, la
résolution d'un PBN est fortement lié à la
résolution d'un problème d'optimisation paramétrique.
Dans le paragraphe à venir, nous présentons les
résultats d'optimisation paramétrique nécessaires à
la résolution des PBN.
1.3 Quelques résultats d'optimisation
paramétrique
On considère le problème (1.8) pour y
fixé dans 1[8m ; avec les fonctions f, g
et h suffisamment régulières.
On considère l'application M : 1[8m
-> 2' définie par :
{ }
M(y) := x E 1[8n :
g(x, y) < 0 et h(x, y) = 0 pour tout
y E 1[8m.
M(y) est l'ensemble réalisable de (1.8)
pour le paramètre fixé y. On défini l'ensemble
des minimaux locaux de (1.8) par
{ }
Øloc(y) = x E M(y) :
?E > 0 avec f(x, y) < f(z,
y) Vz E M(y) n
Vå(x) ;
{ }
où Vå := z E
Rn : 11x - z11 < E est la
boule ouverte centré en x et de rayon E.
Soit L(x, y, À, u) := f(x,
y) + ÀTg(x, y) +
uTh(x, y) , le lagrangien du
problème (1.8).
Genéralités sur la programmation
mathématique à deux niveaux 7
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
On pose :
{ }
A(x, y) := (À, u) E 1[8p x
1[8q : À > 0,
ÀTg(x, y) = 0,
VxL(x, y, À, u) = 0
{ }
L'ensemble SP(y) = x E
M(y) : A(x, y) =6 0 est appelé l'ensemble des
points station-
naires du problème (1.8)
Dans la suite, nous utiliserons abondamment l'assertion suivante
:
{ }
(C) : l'ensemble (x,y) E 1[8n x 1[8m
: g(x, y) < 0, h(x, y) = 0 est non
vide et compact
Définition 1.3.1. Soit y0 E 1[8m,
x0 E M(y0)
On dit que lescontraintes de qualification de
Mangasarian-Fromowitz (MFCQ) sont satisfaites au point (x0,
y0) s'il existe une direction d E 1[8n satisfaisant
:
Vxgi(x0, y0)d < 0 pour
tout i E I(x0.y0) := {j :
gj(x0, y0) = 0}
Vxhj(x0, y0) = 0 pour tout j
= 1, ...., q
}, , q sont linéairement indépendants.
{et les gradients Vxhj(x0,y0) : j
= 1
Définition 1.3.2. soit y0 E 1[8m et
x0 E SP(y0)
On dit que les conditions suffisantes d'optimalités
forte (SSOC) sont satisfaites au point (x0, y0) si pour
tout (À, u) E A(x0, y0) et pour tout d
=6 0 satisfaisant :
(i) Vxgi(x0, y0)d = 0 pour
tout i E J(À) := {j :
Àj > 0}
(ii) Vxhj(x0, y0) = 0 pour tout j
= 1, ..., q on a dTV xxL(x0,
y0, À, u)d > 0.
Définition 1.3.3. On dit que les contraintes de
constance de rang (CRCQ) sont satisfaites au point (x0,
y0) si il existe une boule ouverte centrée en (x0,
y0) de rayon e > 0
Wå(x0, y0)
tel que pour tout sous ensembles I Ç
I(x0, y0) := {i :
gi(x0, y0) = 0} ; J Ç {1, ....,
q} , la
{ } { }
famille de gradients Vxgi(x,y) :
i E I U Vxhj(x0,y0) : j E
J ait le même rang pour tout (x, y) E
Wå(x0, y0).
Définition 1.3.4. Une fonction f : 1[8k
-- 1[8 est dite semi-continue inférieurement au point
|
zn = z on a lim inf
n?oo
|
f(zn) > f(z)
.
|
z E 1[8k si pour toute suite
{zn}oon°1 Ç 1[8k avec lim
n?oo
f est dite semi-continue supérieurement au point
z E 1[8k si pour toute suite {zn}oon°1
Ç 1[8k
|
avec lim
n?oo
|
zn = z on a lim sup
n?oo
|
f(zn) < f(z)
.
|
Genéralités sur la programmation
mathématique à deux niveaux 8
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
Définition 1.3.5. Une fonction F : Rk -?
2Rl est dite semi-continue supérieurement au point
z ? Rk si pour tout ensemble ouvert Z avec
F(z) ? Z , il existe une boule ouverte centrée en
z, Uä(z); 8 > 0 telle que
F(z') ? Z pour tout z' ?
Uä(z).
F est dite semi-continue inférieurement au
point z ? Rk si pour tout ensemble ouvert Z avec
F(z) n Z =6 Ø , il existe une boule ouverte
centrée en z, Uä(z); 8 > 0
telle que F(z') n Z =6 Ø pour tout
z' ? Uä(z).
Définition 1.3.6. Une fonction F : Rk -?
2R1 telle que F(y) est non vide et compact pour tout y
? Rk est dite Lipchitz-continue supérieurement
en un point z ? Rk si il existe une boule ouverte
centrée en z, (Uä(z); 8 > 0)
et une constante K < 8 telle qu'on a pour tout z'
? Uä(z), l'inclusion
F(z') ? F(z) + Kkz -
z'kBl ; où Bl
désigne la boule unité de Rl.
F est dite Lipschtz-continue inférieurement en
un point z ? Rk si il existe une boule ouverte
centrée en z,( Uä(z); 8 > 0)
et une constante L < 8 telles que pour tout z', z''
? Uä(z), on a l'inclusion
F(z') ? F(z'') +
Kkz'' -
z'kBl.
Définition 1.3.7. L'optimum local x0 ?
Øloc(y0) est dit fortement stable s'il existe une boule ouverte
centré en y0 (Uä(y0), 8 > 0)
, une boule ouverte centré en x0
(Vå(x0), å > 0) et une
fonction continue
x : Uä(y0) -?
Vå(x0) tel que x(y) soit
l'unique optimum local du problème (1.8) dans
Vå(x0) pour tout y ?
Uä(y0).
Théorème 1.3.1. [16] Soit y0 ?
Rm. On suppose que les assertions (MFCQ) et (SSOC) sont
satisfaites pour (1.8) en (x0, y0) avec x0 ?
Øloc(y0). Alors l'optimum local x0 est fortement
stable.
La preuve originale de ce théorème dans [16]
utilise une théorie que nous n'avons pas abordé dans ce travail :
la théorie du degré. Dans [11], ce résultat est
démontré autrement en supposant qu'en plus, ( 1.8) satisfait les
contraintes d'indépendance linéaire (LICQ) en (x0,
y0).
Définition 1.3.8. On dit que (1.8) satisfait les
contraintes d'indépendance linéaire (LICQ) en (x0,
y0) si la famille de gradients :
n o [ n o
?xgi(x0, y0), i ?
I(x0, y0)
?xhj(x0,y0),j = 1, ..., q est
linairement independante.
Où I(x0, y0) := i :
gi(x0, y0) = 0
Définition 1.3.9. Une fonction f : Rp -? Rq
est dite localement Lipschitz-continue au point x0 ? Rp s'il
existe une boule ouverte centré en x0,
(Vå(x0), å > 0) et
une constante K < 8 tel que
f(x) - f(x') .
= Kkx - x0k pour tout x, x'
? Vå(x0)
F est dit localement Lipschitz-continue
supérieurement en x0 si pour toute boule ouverte
centrée en x0 ? Vå(x0),
å > 0 et pour une certaine constante K < 8, on a
l'égalité :
f(x) - f(x0) =
Kkx - x'k pour tout x ?
Vå(x0)
Genéralités sur la programmation
mathématique à deux niveaux 9
Définition 1.3.10. Une fonction f : 1[8p -? 1[8q
est appelé PC-function (piecewise continuously differentiable
function) en x0 s'il existe une boule ouverte centrée en
x0 (Vå(x0) , e >
0) et un nombre finie de fonctions continûment
différentiables
fi :Vå(x0)
-? 1[8q, i = 1, ..., t
tel que f est continue sur
Vå(x0) et f(w) ?
{f1(w), ..., ft(w)}. pour tout w ?
Vå(x0).
Théorème 1.3.2. [17] Les PC-functions sont
localement Lipschitz-continues avec pour constante de Lipschitz la plus grande
constante de Lipschitz de la famille de fonction qui définit la
PC-function.
La preuve de ce théorème nécessite le lemme
suivant :
Lemme 1.3.1. [24]
Soit g : [0,1] -? 1[8p une fonction continue et soit la
famille d'ensemble non vide fermé {Ai}qi=1 ? 1[8m
telles que
|
[
g([0,1]) :=
x?[0,1]
|
{g(x)} ?
|
[ q i=1
|
Ai
|
alors, il existe une suite de réels
{ti}r+1
i=0 avec t0 = 0, tr+1 = 1,
ti < ti+1 ?i et la suite {ji}ri=0
i = 0, ...,r telle que
{g(ti), g(ti+1)} ? Aji
i = 0, ..., r.
La preuve de ce lemme ce fait par induction sur le nombre r
des différents ensembles Ai pour lesquels il existe des points
t tels que g(t) ? Ai. On peut la trouver dans
[11].
Preuve (du théorème) :
Soit f : 1[8p -? 1[8q une PC-function. Soit x0
? 1[8p ; f est une PC-function en x0.
Par définition, il existe une boule ouverte
Vå(x0) centrée en
x0 de rayon e > 0 et un nombre finie de fonctions
continûment différentiables
fi : Vå(x0)
-? 1[8q, i = 1, ..., k
telles que f est continue sur
Vå(x0 et
f(u) = {f1(u), ..., fk(u)} ?u
? Vå(x0)
soit x, y ?
Vå(x0) Posons :
w(t) = f(x + t(y - x)), t ? [0, 1]
wi(t) := w(t) si fi (x + t(y - x))
= f(x + t(y - x))
x.
n o
Ai = x ?
Vå(x0) : fi(x) = f(x) .
Puisque f est continue sur
Vå(x0), Ai est
fermé.
En effet, soit {xk}k ? Ai une suite de points
telle que xk ?
k?+8
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
Genéralités sur la programmation
mathématique à deux niveaux 10
Il suffit de montrer que x ? Ai. On a :
|
(xk ?
k?+8
|
x) =f(xk) ? f(x) (car f est continue sur Vå(x0))
k?+8
|
De même, puisque fi est continue sur
Vå(x0), on a
|
(xk ?
k?+8
|
x) fi(xk) k?+8 fi(x)
|
Étant donné que xk ? Ai ?k ? N, on a fi(xk) = f(xk)
?k ? N d'où
f(xk) ? f(x) et f(xk) ? fi(x)
k?+8 k?+8
et par unicité de la limite, on a f(x) = fi(x)
d'où x ? Ai. et par suite, Ai est fermé.
D'après le lemme 1.3.1, il existe des points t0 = 0 <
t1 < ... < tr < tr+1 = 1 tels que :
w(ti), w(ti+1) ? Ajz, i = 0, ..., r (i)
on a
|
f(y) - f(x) 1 1 = 1 lw(1) - w(0)Il=
|
r
i=0
|
w(ti+1) - w(ti)
|
|
=
|
r
i=0
|
wjz(ti+1) - wjz(ti)
|
(d'après (i))
|
|
r
= E
i=0 r
= E
i=0
|
wjz(ti+1) - wjz(ti)11
fjz (x + ti+1(y - x) - fjz(x + ti(y - x) 11
|
|
r
= E
i=0
|
Kjz x - ti+1(y - x) - ti(y - x) (car fjz est lip sur
Vå(x0))
|
|
r
= E
i=0
|
Kji (ti+1 - ti)(y - x)
|
|
= max
1=j=k
|
Kjzky - xk
|
r i=0
|
|ti+1 - ti|
|
= Kky - xk
|
Où K = max
j
|
Kjz est la plus grande constante de lipschitz des fonctions fi,
i = 1, ... , k
|
Donc f est localement lipschitzienne.
·
L'intérêt des PC-function est qu'elles
possèdent un grand nombre de propriétés qui sont d'une
grande utilité dans l'optimisation paramétrique. Nous allons
maintenant définir la notion de gradient généralisé
au sens de Clarke.
Définition 1.3.11. Soit f : Rp -? R une fonction
localement Lipschitz- continue. Le gradient généralisé
au sens de Clarke de f en x0 est défini par :
?f(x0) = convn lim k?8 ?f(xk) : k J
xk = xo, V f (xk) existeVk ?
00
où conv désigne l'enveloppe convexe.
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
Genéralités sur la programmation
mathématique à deux niveaux 11
Théorème 1.3.3. [11] Soit f : 118p ->
118 une PC-function alors
n o
?f(x0) = conv ?fi(x0) : x0 E cl
int supp(f, fi)
où supp(f, fi) = {x : f(x) = fi(x)}
; cl int supp(f, fi) est l'adhérence de
l'intérieur de l'ensemble supp(f, fi).
La preuve de ce théorème peut être
trouvé dans [11]
Définition 1.3.12. Une fonction f : 118p ->
118 est dite différentiable en x0 dans la direction r E 118p si
la quantité suivante existe et est finie :
|
f0(x0, r) := lim
t?o+
|
[f(x0 + tr) - f(x0)]
t
|
f0(x0, r) est la
dérivé de f dans la direction r en
x0.
Définition 1.3.13. Une fonction directionnellement
différentiable f : 118p -> 118 est dite
Bouligand-différentiable (B-différentiable) en x0
si la dérivée directionnelle d'ordre 1 de f
en x0 ; i.e
lim
x?x0
= 0
f(x) - f(x0) - f0(x0, x
- x0)
kx - x0k
. Une fonction f localement Lipschitz-continue,
directionnellement différentiable est B-différentiable
[20] et f0(x0, .) est une
sélection continue de fonction linéaires :
n o
f0(x0, r) E ?fi(x0)r :
i E Io f(x0)
n o
où Io f(x0) = i : x0 E supp(f,
fi)
Définition 1.3.14. Une fonction f : 118p ->
118 est dite pseudodifférentiable en x0 si il existe
une boule ouverte centrée en x0,
(Vå(x0), å > 0) et une fonction
semi-continue supérieurement Pf : Vå
-> 2Rp avec Pf(y) non vide,
convexe et compact pour tout y E Vå(x0)
telles que
f(x) = f(x0) + g(x - x0) + o(x, x0, g) Vx
E Vå(x0)
où g E Pf(x) et lim
o(xk,x0,gk)= 0 Pour
toute suite {xk}k i , {gk}k
1 avec lim xk = 0, gk E
k?0 kxk-xok --
k--
Tf(xk)
.
Le théorème suivant est fondamental en ce sens
qu'il permet de transformer (1.7)-(1.8) en un problème d'optimisation
à un niveau.
Théorème 1.3.4. Considèrons le
problème (1.8) en y = y0 et supposons que les assertions (MFCQ), (SSOC),
et (CRCQ) sont satisfaites en un point stationnaire x0 E sp(y0). alors
x0 est fortement stable et l'unique fonction x(y) avec {x(y)} =
Øloc(y) n Vå(x0) est une
PC-function.
La preuve de ce théorème nécessite des
notions que nous n'avons pas jusqu'ici abordées ; elle peut être
néanmoins trouvée dans [11].
Le corollaire suivant découle des propriétés
des PC-functions.
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
Genéralités sur la programmation
mathématique à deux niveaux 12
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
Corollaire
Sous les hypothèses du Théorème 1.3.4 on a
que la solution optimale locale x(y) est
? Localement Lipschitz-continue de jacobien
généralisé au sens de Clarke donné par :
{ }
Ox(y0) = conv Vxi(y0) : i E Io x(y0)
? Directionnellement différentiable avec
{ }
x'(y0, r) = Vxi(y0)r : i E Io x(y0)
? B-différentiable
? Pseudodifférentiable de différentielle
{ }
x(y0) = conv Vxi(y0) : i E Ix(y0)
Nous allons maintenant présenter quelques conditions
sous lesquelles le problème (1.7)-(1.8) admet une solution locale ou
globale. Nous ne traiterons dans le paragraphe suivant par soucis de
clarté de notre exposé , que le cas où le problème
du suiveur (1.8) admet une solution pour chaque paramètre y ; le cas de
la non unicité qui constitue le coeur de notre travail sera
traité au chapitre suivant.
1.4 Conditions d'optimalités
1.4.1 Cas des PBN linéaires
Définition 1.4.1. Un PBN est dit linéaire si toutes
les fonctions contraintes et les fonctions objectifs du leader et du suiveur
respectivement sont linéaires. La formulation générale
d'un PBN linéaire est la suivante :
{ }
min < d1,x > + < d2,y >: A3y = b,y = 0,x E
Ø(y) . (1.10)
y
|
avec Ø(y) = Argmin
x
|
{ }
< c,x >: A1x < a - A2y,x = 0 où x E
IIBn,y E IIBm a E IIBp,b E IIBl et
|
les matrices A1, A2,A3 ainsi que le vecteur c sont de dimensions
appropriées. Ø(y) est l'ensemble des solutions du problème
du suiveur donné par :
{ }
min < c,x >: A1 < a - A2y,x = 0 (1.11)
x
Définition 1.4.2. Une fonction : IIBp -? 2Rq
est dit polyédrique si son graphe
{ }
grph() := (x, y) E IIBp x IIBq : x E (y) s'écrit comme
réunion finie d'ensemble convexes
polyédriques.
Un ensemble convexe polyédrique est une
intersection finie de démi-espaces [15].
Théorème 1.4.1. La fonction
Ø(.) : IIBm -? 2Rn
|
y H Argmin
x
|
{ }
< c, x >: A1x < a - A2y, x = 0 est
polyédrique.
|
Genéralités sur la programmation
mathématique à deux niveaux 13
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
Corollaire
{ }
(x,y) : A1 + A2 < a, A3y = b, x > 0, y > 0
Si le problème (1.11) admet une solution unique pour
chaque paramètre y, alors le problème (1.10) - (1.11) admet une
solution optimale qui est le sommet du polyèdre que constitue
l'ensemble
.
Si le problème du suiveur admet une solution unique
pour chaque paramètre y alors, ces solutions définissent une
application y i- " x(y) linéaire ; le PBN se reformule de la
façon
suivante :
Preuve :
{ }
min < d1, x(y) > + < d2, y >: A3y = b, y > 0 y
ce qui est un problème de programmation linéaire
simple dont on sait que la solution optimale est atteinte sur les sommets du
polyèdre que constitue l'ensemble des contraintes.
·
1.4.2 Cas général
Définition 1.4.3. On suppose que card Ø(y) = 1 pour
tout y E Y . On appelle fonction à valeur optimale la
fonction
? : 1[8m - " 1[8n
{ }
y i- " ?(y) = Argmin f(x, y) : g(x, y) < 0 et h(x, y) = 0
x
On convient de noter ?(y) = x(y) pour tout y E Y .
Théorème 1.4.2. Si les assertion (C), et
(MFCQ) sont satisfaites, alors la fonction ø(.) est
semi-continue supérieurement et la fonction à valeur optimale
?(.) est continue.
Ce theorème est démontré dans [11]
Théorème 1.4.3. On considère le PBN
(1.7) - (1.8) et on suppose que les assertions (C) et (MFCQ) sont satisfaites
en tout point (x, y) E 1[8n x Y , avec x E M(y) ;
on suppose en plus que R =6 0 et que card Ø(y) = 1
pour tout y E Y . Alors le PBN admet une solution optimale
globale.
Preuve :
Puisque card Ø(y) = 1 pour tout y E Y le problème
(1.7) - (1.8) est équivalent au problème :
{F(x, y) = F(x(y), y), y E Y}
min . (1.12)
y
où Vy E Y, x(y) = ?(y) est la solution du
problème du suiveur. La fonction F est continue et d'après le
lemme, ?(.) est continue. D'autre part Y est un fermé borné de
1[8m donc est compact ; d'où , (1.12) admet une solution
optimale globale.
Genéralités sur la programmation
mathématique à deux niveaux 14
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
D'autres conditions d'optimalités des PBN peuvent
être trouvées dans [11].
Maintenant que nous sommes en possession de quelques
résultats nous permettant d'affirmer sous certaines conditions
l'existence de solutions globales ou locales du PBN (1.7) - (1.8), il se pose
la question de savoir : comment déterminer de façon effective ces
solutions ?
1.5 Algorithmes et méthodes de résolution
des PBN
La littérature nous propose dans le cas de
l'unicité de la solution du problème du suiveur, plusieurs
algorithmes permettant le calcul de la (ou des) solution(s) de (1.7) - (1.8).
Nous présentons dans ce paragraphe un algorithme inspiré de la
méthode de descente connue en optimisation à un niveau et un
algorithme dit du paquet.
1.5.1 Algorithme de descente
Si le problème du suiveur admet une solution unique
pour tout paramètre y alors (1.7) - (1.8) est equivalent
à (1.12).
Supposons que (1.8) est un problème d'optimisation
paramétrique convexe et que les assertions (MFCQ), (CRCQ) et (SSOC) sont
satisfaites en tout point (x, y) tel que
x E Ø(y), G(y) <
0. Alors, d'après le théorème 1.3.1 l'unique solution
optimale de ce problème est fortement stable. Par le
théorème 1.3.5 elle est une PC-function et par conséquent
la dite solution est localement Lipschtz-continue . Il s'ensuit que la fonction
objectif de (1.12) est di-rectionnellement différentiable.
Ce qui motive à envisager un algorithme de
descente[11]. La méthode consiste en : étant donné un
point réalisable x chercher une direction de descente d
E Rn suivant laquelle F(.) décroît. Un
nouveau point x + Ed (E > 0) est
déterminé de façon à assurer une
décroissance raisonnable de F(.) tout en demeurant
réalisable pour le PBN. On construit ainsi une suite qui converge vers
une solution stationnaire au sens de Clarke.
Définition 1.5.1. Soient f E C(Rp,
R) et x E Rp.
1. On dit que d E Rp\{0} est une direction de descente
en x s'il existe Eo > 0 tel que
f(x + Ed) < f(x)
VE E [0, E0].
2. On dit que d E Rp\{0} est une direction de descente
stricte en x s'il existe Eo > 0 tel
que f(x + Ed) < f(x) VE
E [0, Eo].
Définition 1.5.2. Soit f : Rp -> R une
fonction et z E Rp. Si f est localement Lipschtz-continue,
z est dit stationnaire au sens de Clarke si 0 E
?f(z) ; si f est pseudodifférentiable, le
point z est dit pseudostationnaire si 0 E (z).
Genéralités sur la programmation
mathématique à deux niveaux 15
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
Algorithme de descente
|
Entrée : Les paramètres du PBN (1.7) - (1.8).
Sortie : Une solution stationnaire au sens de Clarke.
1. Choisir y0 satisfaisant
G(y0) < 0;
2. Initialiser k := 1
3. Déterminer une direction rk,
1rk1 > 1 satisfaisant F(yk,
xk) < sk
VyGi(yk)rk
< -Gi(yk) + sk, Z
= 1, ..., l et sk < 0;
4. Choisir un pas de longueur tk tel que
F(yk + tkrk) <
F(yk) + Etksk,
G(yk + tkrk) < 0
5. Initialiser xk+1 :=
xk + tkrk ,
déterminer xk E
ø(yk) ; incrementer k := k
+ 1;
6. Si un critère d'arrêt est satisfait,
arrêter ; sinon aller à l'étape 2.
|
On se donne en général un critère
d'arrêt de la forme xk+1 -
xk ~< E. De plus, puisque la
convergence n'est pas toujours assuré, une règle de base est de
fixer le nombre d'itérations maximale Kmax.
Sous certaines conditions de régularité, on
montre [11] que chaque point d'accumulation de la suite (xk,
yk) obtenue au moyen de l'algorithme est un point stationnaire
de (1.7) - (1.8) au sens de Clarke.
1.5.2 L'algorithme du paquet
On considère le problème (1.8) en y =
y0 et on suppose que les assertions (MFCQ), (SSOC) et (CRCQ) sont
satisfaites en x0 E SP(y0) . Alors (1.12) est un
problème de minimisation d'une fonction Lipschtz-continue.
Nous présentons l'algorithme dans le cas où la
contrainte G(y) < 0 est absente.
Soit v(y) le gradient
généralisé au sens de Clarke de F ; la méthode du
paquet s'inspire de la méthode dite de découpage de plan (cutting
plane method) pour la minimisation de fonctions convexes.
Soit {yi}ki=1 ; {zi}ki=1
des points d'essaie et des itérées déjà
évalués. La méthode de découpage du plan consiste
à minimiser la fonction :
mia k nv(yi)d +
v(yi)(zk - yi) + F(yi)o (1.13)
La direction d qui minimise ce modèle est une
direction de descente si y n'est pas un point stationnaire. Mais il
s'avère que l'utilisation du modèle (1.13) pour trouver une
direction de descente à une vitesse de convergence très lente;
c'est pourquoi à (1.13) on ajoute le terme de
régularisation quadratique (2tkjdT
d pour obtenir le modèle
e1<rm
1
nv(yi)d - áik > +
F(zk) + (2t )dTd (1.14)
-- = J k
Avec áik = F(zk) -
v(yi)(zk - yi) -
F(yi)
La solution optimale d de (1.14) est une direction de
descente pour F(y) en y = zk sous réserve que
le modèle donne une approximation suffisamment bonne de F(y)
dans un voisinage du point non stationnaire zk. Une nouvelle
itérée est zk+1 = zk + d est
calculée de manière à faire décroître de
façon considérable la fonction modèle ; i.e F(zk
+ d) < F(zk).
Genéralités sur la programmation
mathématique à deux niveaux 16
Mémoire de DEA *
Laboratoire d'analyse numérique *
UYI Francisque.D.Fouodji c~UYI 2007-2008
Si dans le voisinage de zk la direction de descente
n'est pas assez bonne, alors aucune nouvelle itérée n'est
calculée mais les nouveaux points d'essaie yk+1 et zk
seront utilisés pour rechercher une nouvelle direction de descente
dans (1.14) après ajout d'un gradient généralisé
?..F(yk+1).
Algorithme du paquet
|
Entrée : Suite d'itérée
{zi}k i=1 et des points d'essaie
{yi}k i=1, le paramètre de
régularisation tk
Sortie : Une meilleure itérée
zk+1 ou un modèle amélioré.
1. Calculer une solution optimale dk de (1.14);
initialiser : yk+1 := zk + dk
2. Si ..F(yk+1) est suffisamment petit comparé
à ..F(zk) alors :
a) Agrandir tk et retourner à 1 ou
b) Poser zk = yk+1 . Si ..F(yk+1)
n'est pas suffisamment petit comparé à ..F(zk) alors
c) réduire tk et retourner à 1 ou
d) poser zk+1 = zk calculer
v(yk+1) E ?..F(yk+1)
|
Il existent plusieurs critères pour le choix de tk
à l'étape 2; ils peuvent être trouvés dans
[11].
Pour terminer ce chapitre , nous allons présenter
quelques unes des nombreuses applications de la PBN.
1.6 Les applications de la PBN
1.6.1 Production agricole , production de biocarburant
Nous présentons ici un modèle qui nous a
été inspiré par la lecture de [18] et dont la
résolution permettrait non seulement d'augmenter la production agricole
du Cameroun (jugulant ainsi la crise alimentaire dont est sujet le pays), mais
aussi de réduire la pollution de l'air par les gaz d'échappement
d'automobiles et la pollution du sol et des eaux par les engrais chimiques.
Gêné dans sa politique de développement
par la faiblesse de la production agricole, face à la
nécessité de réduire la pollution associé à
l'émission des gaz d'échappement des automobiles et la pollution
des sols et des eaux par les engrais chimiques, le gouvernement Camerounais
décide d'explorer les possibilités afin d'encourager l'industrie
pétrochimique à utiliser les produits agricoles pour produire du
biocarburant. Différents produits agricoles tels que le tournesol, le
soja, les graines de coton, ou l'arachide peuvent être utilisés
à cette fin [18]. Mais il s'avère que le coût de production
de biocarburant est plus élevé que le coût de production de
carburant en utilisant les hydrocarbures. Dans le but d'encourager les
industriels à utiliser les produits agricoles, le gouvernement leurs
accordent une réduction de taxe suffisante. En contrepartie, l'industrie
s'engage à être neutre (i .e à ne pas spéculer sur
les prix) et à produire du biocarburant.
Le secteur agricole est représenté par un
ensemble d'exploitations agricoles; nous décrivons le modèle pour
une seule exploitation agricole; il pourra être facilement
généralisé dans le cas de plusieurs exploitations.
L'exploitant peut librement laisser une partie de sa
plantation en jachère (au quel cas plus tard cette partie pourra
être cultivé sans usage d'engrais chimiques) ou l'utiliser
à la production de plantes pour biocarburant. Dans les deux cas, il
engrange des revenues sous forme de
Genéralités sur la programmation
mathématique à deux niveaux 17
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
prime du gouvernement pour avoir laissé une partie de
ses terres au repos ou sous forme de subventions de l'État plus les
bénéfices faits après la vente de sa production à
l'industrie.
Pour maximiser son profit, le fermier décide par lui
même quelle surface de terre il va laisser en jachère, quelle
surface il va utiliser pour la culture de plantes destinées à la
production de biocarburant et quelle surface utiliser pour la production des
autres produits.
Soit xj E IR, xn E 1[8p,
xd E 1[8q respectivement la surface de terre laissée
en jachère, utilisée pour la production de produits pour
biocarburant et utilisée pour la production des autres denrées.
On considère les vecteurs ep = (1, ....,1)T
E 1[8p ; eq = (1, ....,1)T E
1[8q. (Les entiers p et q representant le nombre de produits agricoles
utilisés pour la productions de biocarburants et le nombre de produits
destinés à la consommation. Chaque composante des vecteurs
xn et xd representant la surface utilisée
pour la culture d'un produit fixé.)
Le problème du fermier consiste à maximiser
l'argent qu'il gagne grace à son exploitation :
|
< pd + u - cd,xd > + <
pn + s - cn,xn > + ãxj
--* max
|
(1.15)
|
|
xj,xd,xn
|
|
|
< ep, xn > + <
eq, xd > +xj C t
|
(1.16)
|
|
< ep, xn > +
xj C ó1t
|
(1.17)
|
|
< ep, xn > + <
eq, xd > C ó2t
|
(1.18)
|
|
xd C t', xn > 0, xd
> 0 , xj > 0
|
(1.19)
|
Où :
D pn,pd désignent respectivement le
vecteur argent gagné par unité de surface cultivé de
produits pour biocarburant et le vecteur bénéfice par
unité de surface cultivés pour les autres produits.
D s est le vecteur subventions accordées par
l'État pour les produits pour biocarburant ; cn le
coût de la production de ces plantes.
D ã est la prime par unité de surface de terre
laissée en jachère.
D u est la subvention accordée par unité de
surface de terre utilisée à la production d'autres produits ;
cd leurs coût de production.
D t est la surface de terre arable que dispose le fermier.
D ó1 et ó2 sont des proportions fixé par
le gouvernement.
D (1.15) est la fonction objectif du fermier.
D (1.16) est la contrainte sur la surface de terre arable
disponible dans l'exploitation agricole. En effet, on ne peut utiliser que ce
que l'on possède.
D (1.17) les restrictions de l'État sur la proportion
de terre laissée en jachère ou utilisée à la
production de plantes pour biocarburant. Car il faut encourager la production
des produits agricole destinées à la consommation.
D (1.18) les considérations agronomique visant
à limiter la surface de terre cultivé (pour éviter
Genéralités sur la programmation
mathématique à deux niveaux 18
la pollution du sol).
D La première inégalité de (1.19)
représente la contrainte sur certaines denrées qu'on ne veut pas
produire au delà de certaines quantités.
Le gouvernement joue le rôle de leader dans ce
problème. Son objectif est de minimiser le total des primes et des
subventions accordées aux exploitants. Soit kr le
vecteur volume de biocarburant r, r = 1, ..., w
produit par unité de surface ; Soit Tr la
réduction de taxe (proportionnelle au volume de biocarburant produit)
accordée à l'industrie pour le biocarburant r.
Alors le gouvernement doit résoudre le problème
:
Xw r=1
|
Tr < kr, xn > +
ãxj + < ueq, xd > + <
sep, xn >? « min
ô,ã,u,s
|
» (1.20)
|
|
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
< ep, xn > < t'
(1.21)
Xw < kr, xn
> < H (1.22)
r=1
pn = pn(T)
> 0, T > 0, ã > 0, u > 0
(1.23)
où xn, xj, xc
résolvent(1.15) - (1.19) (1.24)
Où
D t' et H sont des données
fixés par le gouvernement
D (1.20) est la fonction objectif du gouvernement
D (1.21) est la contrainte sur la surface de terre
utilisé pour la production de biocarburant.
D (1.22) la contrainte sur la quantité de biocarburant
produit.
D (1.23) traduit la neutralité de l'industrie, le prix
du biocarburant est fonction des réductions de taxes T et est
fixé une fois pour toute.
Nous obtenons ainsi un PBN. Ce modèle peut être
élargie à un problème d'optimisation à trois
niveaux en y incluant le problème de l'industrie
pétrochimique.
1.6.2 Le problème principal-agent [10]
Ceci est un cas particulier des problèmes de la
théorie du principal - agent.
Un décideur appelé le principal engage
un autre l'agent pour le représenter dans l'une de ses
structures. Les décideurs signent un contrat ou il est consigné
que le principal délègue (une partie de) son autorité
à l'agent ; en lui donnant ainsi la liberté de choisir ses
actions (de façon limitée ou non) en fonction de ses propres
objectifs seulement. Ainsi, uniquement dans l'espoir d'atteindre ses objectifs,
l'agent cherche à maximiser l'impact de son action a E A en
résolvant le problème :
|
Z
max
a?A
X
|
G(s(x), ag(x|a)dx
.
|
Genéralités sur la programmation
mathématique à deux niveaux 19
Où la fonction d'utilité G : 118 x
A -? 118 permet de mesurer la valeur de la
rémunération s(x) à recevoir du principal
représentant la contrepartie des efforts consentis pour son action a
et X est l'ensemble des résultats possibles des actions
a E A de l'agent. La densité désignée par la
fonction g(x|a) est utilisée pour décrire les
probabilités de réalisation des résultats x E X
si l'agent mène une action a E A. La remuneration s(x)
est payée à l'agent si le résultat x est
obtenu. La fonction s : X -? 118 fait aussi partie du contrat
signé par les deux parties. Du point de vue du principal, la fonction
s représente aussi un ensemble de primes servant à
motiver l'agent à agir afin qu'il puissent atteindre ses objectifs.
Ainsi, le principal doit choisir cette fonction de façon à
approcher son but au maximum. En supposant que le principal utilise la fonction
d'utilité H : 118 -? 118 pour mesurer son profit x
- s(x) provenant des activités de l'agent et qu'il utilise la
même densité g pour évaluer les
probabilités requises pour la réalisation du résultat
x, il aura besoin pour la réalisation de ses objectifs de
résoudre le problème :
|
msESax J
X
|
H(x - s(x))g(x|a')dx).
|
où S désigne l'ensemble de tous les
systèmes de remuneration possible et a' une solution
du problème de l'agent pour une fonction fixé s(.). Le
modèle obtenu ne saurait être complet sans la condition
J G(s(x),
a')g(x|a')dx > c
X
,où a' résoud le
problème de l'agent. Si cette inégalité n'est pas
satisfaite, l'agent n'acceptera pas de signer le contrat avec le principal.
Cette inégalité représente donc une contrainte que doit
respecter le leader. Ce problème peut être résumé
par :
|
max JsES
X
|
H(x - s(x))g(x|a')dx).
|
|
Jsujet :
X
|
G(s(x), a')g(x|a')dx > c
|
|
a' E Argmin
aEA
|
J
X
|
G(s(x), a)g(x|a)dx).
|
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
D'autres applications de la PBN peuvent être trouvés
dans [11] ou [10].
Conclusion
Nous avons dans ce chapitre donné une
présentation générale de la programmation
mathématique à deux niveaux et présenté quelques
algorithmes de résolution dans le cas de l'unicité de la solution
du suiveur. Mais il se trouve que dans la plupart des cas, les problèmes
modélisés sous formes de PBN sont tels que le problème du
second plan admet plus d'une solution ; ce qui complique
considérablement le problème. Dans le chapitre suivant, nous
allons présenter les différentes techniques
développées pour attaquer les PBN dans ce cas ; ce qui nous
permettra par la même occasion de définir la notion de
problèmes d'optimisation mal posés.
CHAPITRE DEUX
Non unicité de la solution du problème
du
suiveur : les différentes techniques
d'approches.
Mémoire de DEA * Laboratoire
d'analyse numérique * UYI Francisque.D.Fouodji
c~UYI 2007-2008
Dans toute la suite, lorsque nous dirons "cas de la non
unicité", ce sera pour dire "cas de la non unicité de la solution
du problème du suiveur".
Introduction
Au chapitre un, nous avons présenté quelques
résultats d'optimalité et quelques algorithmes de
résolution des PBN dans le cas de l'unicité de la solution du
suiveur. Il se trouve cependant que dans la plupart des applications, le
problème du suiveur n'admet pas une solution unique; d'où la
nécessité d'explorer de nouvelles techniques afin de
résoudre les PBN dans ce cas plus général.
Les PBN dans le cas de la non unicité font partie d'une
classe plus large de problèmes de programmation mathématique :
les problèmes de programmation mathématique
mal-posés.
Définition 2.0.1. Soit E un
espace de Banach reexif, ó une topologie sur E, K
un convexe fermé non vide de E et h :
K -* R U {+oo}
Le problème de programmation mathématique :
est dit bien-posé au sens de TIKHONOV (resp
bien-posé au sens général) suivant la topologie
ó, s'il existe une solution unique u0 à (2.1)
et toute suite minimisante 1 de (2.1)
ó-converge vers u0 (resp (2.1) a au plus une solution
et toute suite minimisante admet une sous suite qui ó-converge
vers la solution unique.)
Un problème de programmation mathématique est dit
mal-posé s'il n'est pas bien-posé.
Commençons par présenter la position du
problème dans la resolution des PBN dans le cas de la non
unicité.
|
1Une suite
(un)n ? K
est appelé suite minimisante si uim
n?+8
|
h(un)
= inf
h(v).
v?K
|
Par définition de l'infimum, une telle suite existe
toujours.
Non unicité de la solution du problème
du suiveur : les différentes techniques d'approches. 21
2.1 Position du problème
Considérons une nouvelle fois le PBN :
|
«min
y
|
{ }
» F(x, y) : G(y) <
0, x E Ø(y) (2.2)
|
|
Où
|
Ø(y) = Argmin
x
|
{ }
f(x, y) : g(x, y) <
0, h(x, y) = 0 (2.3)
|
Pour y fixé, Ø(y) est l'ensemble
des solutions du problème.
{ }
min f(x, y) : g(x, y) <
0, h(x, y) = 0 (2.4)
x
F : Rn X Rm -? R, f :
Rn X Rm -? R, G : Rn X Rm
-? Rp,
g : Rn X Rm -? Rq sont des
fonctions suffisamment2 régulières.
{ }
Posons Y = y E Rm :
G(y) < 0 et supposons que Y est fermé.
Les guillemets dans (2.2) expriment l'incertitude de la
définition de (2.2) dans le cas de la non unicité; car lorsque
Ø(y) n'est pas réduit à un singleton pour tout
y E Rm, le leader se trouve face à un dilemme.
En effet, pour prendre sa décision (qu'il souhaite
optimale), le leader doit savoir qu'elle sera la décision du suiveur.
Dans le cas où il existe plusieurs décisions possibles pour le
suiveur, le leader se trouve dans l'embarras (car il ne sait sur laquelle
portera le choix de celui-ci).
La question qu'on se pose ici est celle de savoir : comment
aborder le PBN (2.2)-(2.3) dans le cas de la non unicité de la solution
de (2.4) ?
L'exemple suivant illustre les difficultés qu'on peut
rencontrer dans le cas de la non unicité.
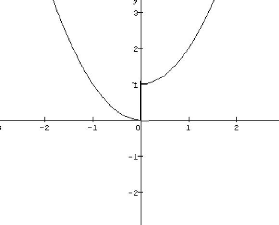
Exemple 2.1.1. On considère le PBN :
|
«min
y
|
{ }
» x2 + y2 : x
E Ø(y), -1 < y < 1
|
|
Où Ø(y) = Argmin
x
On a :
|
{-xy : 0 < x < 1}
|
|
Ø(y) :=
|
{
|
{0} si y < 0
{1} si y >
0
[0,1] si y = 0
|
Ainsi,
|
F(x(y), y) =
|
{
|
y2 si y < 0
1 + y2 si y > 0 E [0,1]
si y = 0
|
. (2.5)
|
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
Le tracé de F est le suivant :
2Suivant les résultats que nous
énoncerons, nous exigerons que ces fonctions satisfassent des
propriétés de régularité parfois
différentes
Non unicité de la solution du problème du
suiveur : les différentes techniques d'approches.
22
Mémoire de DEA *
Laboratoire d'analyse numérique *
UYI Francisque.D.Fouodji c~UYI 2007-2008
FIG. 2.1 Sur les difficultés rencontrées dans le
cas de la non unicité
pour y = 0; on a W(y) = [0,
1]. Donc pour ce paramètre, W(y) contient une
infinité d'éléments. On se trouve donc ici dans le cas de
la non unicité.
d'après (2.5), l'expression de la fonction objectif
n'est connue que si le suiveur annonce clairement son choix; la
solvabilité du problème du leader dépend de ce choix. En
effet, si le suiveur fait le choix x(0) = 0 E W(0) alors le
problème du leader est solvable; la solution optimale du PBN est
(0, 0) et la valeur de la fonction objectif du leader est
0.
{ F (x(y), y) = y2
: -1 y < 0 }
min
y
le PBN n'admet pas de solution dans ce cas car
F(x(y), y) = y2 est
dérivable et on a
Si le choix du suiveur se porte sur x(y) = 0
E W(y), avec y < 0 alors le problème du leader
devient :
VF(x(y),y) =
(0,2y)
VF(x(y),y) = 0 =' y
= 0
Or y = 0 ne satisfait pas à la contrainte
-1 y < 0 donc le problème du leader n'admet pas de
point critique et par conséquent n'admet pas de solution.
Jusqu'ici, trois approches ont été
développées dans la littérature pour résoudre les
PBN dans le cas de la non unicité : l'approche optimiste, l'approche
péssimiste et l'approche par régularisation sur laquelle porte
notre travail.
2.2 L'approche optimiste
Cet approche est envisageable dans le cas où le leader
à la possibilité de persuader le suiveur de prendre une
décision qui lui sera favorable (favorable est compris ici au sens ou la
dite décision permet au leader d'atteindre son objectif).
la formulation optimistique de (2.2)-(2.3) est la suivante
:
min
y
{ }
?o(y) : y E Y
(2.6)
Où
Non unicité de la solution du problème du
suiveur : les différentes techniques d'approches. 23
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
{ }
?o(y) = min F(x,
y) : x E W(y) (2.7)
x
Définition 2.2.1. Un point (x*,
y*) E 1[8nx1[8m est appelé
solution optimiste locale de (2.2)-(2.3) si y* E
Y, x* E W(y*) avec
F(x*, y*) <
F(x, y*) Vx E
W(y*)
et il existe Uä(y*), 8 >
0 boule ouverte centrée en y* de rayon 8
telle que
?o(y*) <
?o(y) Vy E
Uä(y*) n Y
(x*, y*) est appelé
solution optimiste globale si 8 = o0
Énonçons maintenant un théorème
d'existence de solution optimiste :
Théorème 2.2.1. Si les assertions (C) et (MFCQ)
sont satisfaites en tout points (x, y) E 1[8n x Y
avec x E M(y), alors
Le problème (2.2)-(2.3) admet une solution
optimistique globale.
Preuve :
Considérons le problème
{ }
min F(x, y) : y E Y, x E
W(y) (2.8)
x,y
Les solutions globales de (2.8) et le problème optimiste
(2.4)-(2.6)-(2.7) coincident.
En effet si (x*, y*)
vérifie (2.8) alors (x*, y*)
vérifie (2.4)-(2.6)-(2.7).
réciproquement, si (x*, y*)
vérifie (2.4)-(2.6)-(2.7) alors par définition de solution
optimiste globale, on a :
F(x*, y*) <
F(x, y*) Vx E W(y)
et
?o(y*) <
?o(y) Vy E Y
{ }
F (x*, y*) < F
(x, y*) Vx E W(y*) =
F (x*, y*) < min F (x,
y*) : x E W(y*)
x
Or
{ } { }
?o(y*) <
?o(y)Vy E Y ? min
F(x, y*) : x E W(y*)
< min F(x, y) : y E Y, x E
W(y)
x x
{ }
Ce qui implique que min F(x, y*) :
x E W(y*) < F(x, y) Vy
E Y, Vx E W(y)
x
d'où F(x*, y*)
< F(x, y) Vy E Y, Vx E
W(y) autrement dit,
|
(x*, y*) E Argmin
x,y
|
{ }
F(x,y) : y E Y,x E
W(y)
|
donc (x*, y*) est optimum global
de (2.8).
D'autre part, puisque les assertions (C) et (MFCQ) sont
satisfaites, la fonction à valeur optimale
(voir définition 1.4.4) est continue ; ce qui permet de
montrer que l'ensemble
{ }
(x, y) : x E W(y) est fermé.
D'autre part, étant donné que Y est fermé,
l'assertion (C) nous
Non unicité de la solution du problème du
suiveur : les différentes techniques d'approches. 24
.
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
garanti que l'intersection de {(x, y) : x E Ø(y)} avec
Rn x Y est compact (comme fermé dans un compact).
D'où puisque F est continue sur Rn x
Rm, le problème (2.8) admet un optimum global. En vertu de
l'équivalence que nous avons établie entre (2.8) et le
problème optimiste, on conclut que (2.4)-(2.6)-(2.7) admet une solution
optimistique globale.
·
Exemple 2.2.1. Reconsidérons le PBN de l'exemple 2.1.1
:
|
« min
y
|
n o
» x2 + y2 : x E Ø(y), -1 <
y < 1
|
|
Où Ø(y) = Argmin
x
|
n o
- xy : 0 < x < 1
|
Comme trouvé précédemment, on a
?0(y) = minnx2 + y2 : x E Ø(y)=(1 + y2
si y > 0
x
siy < 0

y2
Le problème optimiste s'écrit donc :
n o
min ?0(y) : -1 < y < 1
y
et la solution optimiste globale est (x0, y0) = (0,
0).
L'un des défauts de l'approche optimiste est qu'elle
n'est pas envisageable dans la plupart des cas concrets. En effet, en
économie par exemple, dans le but de faire régner une concurrence
loyale entre des entreprises concurrentes, la législation interdit le
plus souvent une quelconque coopération entre les dites entreprises et
leurs éventuels clients.
Aussi, dans grand nombre de problèmes
modélisés en PBN, le suiveur ne constitue que rarement une
personne physique avec qui le leader pourrait envisager une coopération.
En plus, même si la coopération est permise, le leader n'a pas de
garanti sur le fait que le suiveur respectera ses engagements.
Ceci constitue quelques limites de l'approche optimiste.
|
2.3 L
|
'approche pessimiste
|
Lorsqu'il est impossible au leader d'influencer les choix du
suiveur, une décision optimale du leader, étant donné
qu'il n'a aucun contrôle sur le problème, est celle qui limite au
mieux les dégâts lorsque le suiveur prend des décisions qui
lui sont nuisibles.
Mathématiquement, la formulation pessimiste de
(2.2)-(2.3) s'écrit :
n o
min ?p(y) : y E Y (2.9)
y
|
?p(y) = max
x
|
n o
F(x, y) : x E Ø(y) (2.10)
|
Définition 2.3.1. Un point (x*,
y*) E Rn x Rm est appelé solution
pessimiste locale de (2.2)(2.3) si y* E Y, x* E
Ø(y*) avec
F(x, y*) < F(x*, y*) V x E
Ø(y*)
et il existe Uä(y*), 8 > 0 boule ouverte
centrée en y* de rayon 8 telle que
?p(y*) < ?p(y) Vy E
Uä(y*) n Y
(x*, y*) est appelée solution
pessimiste globale si 8 = +oo.
Le problème 2.4)-(2.9)-(2.10) est appelée
formulation péssimistique de (2.2)-(2.3)).
Non unicité de la solution du problème du
suiveur : les différentes techniques d'approches. 25
Énonçons un théorème d'existence de
solution pessimiste.
Théorème 2.3.1. Considérons le PBN
2.4)-(2.9)-(2.10). Supposons que Ø(.) est
semi-continue inférieurement (Sci) en tout point de Y et que l'assertion
(C) est satisfaite. Supposons que (2.9) admet une solution admissible, alors
2.4)-(2.9)-(2.10) admet une solution optimale globale.
Preuve :
{ }
Posons K = (x,y) ? Rn × Rm
: g(x, y) = 0 et h(x, y) = 0 .
L'assertion (C) nous garanti que K est compact.
Soit P2 : Rn × Rm -? Rm
(x, y) 7-? y la deuxième
projection.
P2(K) n Y est l'ensemble des solutions
admissible de (2.9). P2 étant continue, P2(K)
est compact ; d'où P2(K) n Y est compact
comme intersection d'un fermé et d'un compact.
Montrons que : cpp est semi-continue
inférieurement (Sci).
Soit y0 ? Rm, montrons que cpp
est Sci en y0.
soit (yk)k?N une suite de Rm telle
que (yk)k -? y0
k?+8
Il suffit de montrer que lim inf
cpp(yt) =
cpp(y0)
k?+8
i.e
sup
k?N
inf cpp(yt) =
cpp(y0)
t=k
On a F(x, yt) =
cpp(yt) ?x ?
Ø(yt) d'où
inf
t=k
F(x, yt) = inf
cpp(yt) ?x ?
Ø(yt) ?k ? N
t=k
et
F(x, yt) = sup
k?N
inf
t=k
inf
cpp(yt) ?x ?
Ø(yt)
t=k
sup
k?N
i.e
|
lim inf
t?+8
|
F(x, yt) = lim inf
cpp(yt)
t?+8
|
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI
2007-2008
Or F est continue sur Rn × Rm
;
d'où F(x,.) est continue sur Rm
?x ? Rn fixé ; il vient alors que :
|
lim inf
t?+8
|
F(x, yt) = lim
t?+8
|
F(x, yt) = F(x,
y0) ?x ? Rn
|
Donc
liminf cpp(yt) =
F(x, y0) ?x ? Ø(y0) ? Rn t?+8
d'où
lim inf cpp(yt) = max
x {F(x, y0) : x ?
Ø(y0)}

t?+8
Non unicité de la solution du problème du
suiveur : les différentes techniques d'approches. 26
i.e
lim inf ?p(yt) > ?p(y0)
t?+8
Donc ?p est Sci.
Comme l'ensemble des solution admissibles de (2.9) P2(K) n Y est
compact, le problème 2.4)-(2.9)-(2.10) admet un minimum global.
·
Exemple 2.3.1. On considère une nouvelle fois le PBN
de l'exemple 2.1.1. La formulation pessimiste de ce problème est
:
n o
min ?p(y) : -1 < y < 1
y
Où
(
2 1+ y2 si y > 0
?p(y) = max{x + y2 : x E Ø(y) y
}= si <0
y
avec
|
Ø(y) =
|
{
|
{0} si y < 0
{1} si y > 0
[0,1]
si y = 0
|
.
|
|
Où
|
Ø(y) =
|
{
|
[-1,1] si y = 0
{-y - 1} si y > 0 {-y + 1} si y < 0
|
(x0, y0) = (1, 0) est une solution pessimiste locale et la
valeur péssimistique de la fonction objectif est 1.
Mais la résolution des PBN en utilisant l'approche
pessimiste présente également des défauts :
En effet les solutions pessimiste sont en
général instables, dû [11] au manque possible de
semi-continuité de la fonction Ø(.) qui à chaque
paramètre du problème du leader associe l'ensemble des solutions
du problème du suiveur correspondant.
Ce défaut conduit à deux conséquences
majeures :
r Les solutions péssimiste ne sont pas en
général de bonnes approximations des solutions réalisables
en pratique.
r Une petite perturbation sur les données du
problème peut conduire à un changement drastique de la solution
du suiveur. Ainsi, si le leader ne résolvait pas son problème
réel mais une approximation (ce qui est le cas la plupart du temps), ses
solutions peuvent être éloignées des solutions
réelles.
Les exemples 2.3.2 et 2.3.3 suivants illustrent bien ces
défauts :
Exemple 2.3.2. Considérons le PBN
min
y
{(x - y)2 + y2 : ?20 < y < 20, x E
Ø(y)}
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
Non unicité de la solution du problème du
suiveur : les différentes techniques d'approches. 27
Pour y = 0; on a Ø(y) = [-1,1] et
le problème du suiveur admet pour ce paramètre une
infinité de solutions.
Posons F(x, y) = (x - y)2 + y2
; en introduisant dans F la solution du suiveur , on obtient
:
|
F(x(y), y) =
|
{
|
(-2y - 1)2 + y2 si y > 0 (-2y +
1)2 + y2 si y < 0
E [-1,1] si y = 0
|
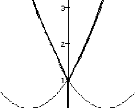
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
FIG. 2.2 Fonction objectif du leader la formulation
optimiste du problème est la suivante :
|
min
y
|
n o
?0(y) : -20 < y < 20
|
Où
n o
?0(y) = min (x - y)2 + y2 : x E
Ø(y)
x
Il est clair que la solution optimiste du problème
est (x0, y0) = (0, 0). Le graphe de F nous permet d'ailleurs
de confirmer ce résultat.
Une fois de plus, d'après le graphe de F,
quelque soit le signe de y, y =6 0 , la fonction F
|
atteint son infimum lorsque y --* 0 et on a :
lim
y?0
|
F(x(y), y) = 1.
|
Ainsi, la solution réalisable en pratique du
problème est atteinte lorsque y --* 0 et la valeur de la
fonction objectif est 1; ce qui est bien éloigné de la
valeur optimistique qui est 0 .
Exemple 2.3.3. Considérons le PBN
n o
min - x + y2 : -0.5 < y < 0.5, x E
Ø(y)
y
|
Où
|
Ø(y) = Argmin
x
|
{xy2 : -1 < x < 1}
|
Non unicité de la solution du problème du
suiveur : les différentes techniques d'approches. 28
On a alors
(
{-1} si y =6 0
W(y) =
[-1,1] si y = 0
Pour y = 0, le problème du suiveur admet
une infinité de solutions; on est donc dans le cas de la non
unicité. La formulation optimiste du problème est :
min
y
{?0(y) : -0.5 < y < 0.5}
|
Où
|
n o
?0(y) = min (-x + y2 : x E W(y)
x
|
L'unique solution optimiste est (x0, y0) = (0, 1)
; et la valeur optimiste de la fonction objectif du leader est -1
Supposons maintenant que le problème du suiveur
soit perturbé de telle sorte que l'ensemble des solutions du
problème du suiveur se réécrivent :
|
Wá(y) = Argmin
x
Où á > 0 et suffisamment petit.
Posons fá(x, y) = xy2 + áx2
On a Vxfá(x, y) = y2 +
2áx
|
{xy2 + áx2 : -1 < x < 1}
|
2
Vxfá(x,y) = 0 = x =
-2
On a
V2 xxfá(x,y) = 2á > 0
d'où pour y admissible, x = -y2
2á est solution du problème du
suiveur. Ainsi,
(
{-1} si y2 > 2á
- y22á
2á
si y2 <
Wá(y) =

Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
En insérant cette solution dans la fonction objectif
du leader, on obtient :
(
F(xá(y), y) = y2 + 1 si
y2 > 2á
y2 - y2
2á si y2 < 2á
Le problème devient donc
n F (xá(y), y) : -0.5 < y
< 0 o
min
y
L'unique solution de ce problème est
yá = 0 Vá > 0
Lorsque á --* 0 , la solution du
problème perturbé est (0, 0) et la valeur de la fonction
objectif tend vers 0; valeur qui est éloigné de la
valeur optimiste-1.
Ainsi, la solution optimiste est instable.
Non unicité de la solution du problème du
suiveur : les différentes techniques d'approches.
29
Mémoire de DEA *
Laboratoire d'analyse numérique *
UYI Francisque.D.Fouodji c~UYI 2007-2008
L'étude tant du point de vue théorique que
numérique d'un problème d'optimisation instable est très
difficile. Néanmoins une possibilité d'éviter ce
problème d'instabilité existe. Elle consiste à prolonger
(une sorte de prolongement par continuité) la fonction W(.) de
façon à obtenir une nouvelle fonction W' : Rm
-? 2R7 continue. D'après les résultats
énoncés dans [23], le nouveau problème "réagira" de
façon régulière aux perturbations
"régulières" (i.e pour de petites perturbations, la solution du
problème perturbé ne sera pas éloignée de la
solution du problème non perturbé) ; et ainsi, le problème
d'instabilité sera résolu.
L'approche pessimiste de résolution des PBN dans le cas
de la non unicité à été intensive-
ment
étudié par P.Loridan, J.Morgan et leurs Co-auteurs. Dans
plusieurs articles, ils étudient le PBN (2.2)-(2.3) dans un cas plus
général, en ce sens que les fonctions f, g, h, F, et G
qui définissent le problème sont perturbées et la
convergence vers un problème non perturbé est
étudiée. (voir par exemple les articles [19, 20, 21]). Dans [22],
le concept de å-optimalité est utilisé pour
régulariser le problème pessimiste.
Malgré tous ces résultats, certains
problèmes demeurent :
? l'approche optimiste est très peu souvent
envisageable;
? les solutions péssimistes, même lorsqu'elles sont
stables sont le plus souvent éloignées des solutions
réelles;
? comment discriminer entre l'approche péssimiste et
optimiste? Autrement dit dans une situation donnée, comment savoir
quelle approche (optimiste ou péssimiste) est la plus
adéquate?
Afin de contourner ces difficultés, il serait
préférable pour le leader, non pas de calculer la solution
"réelle" optimiste ou péssimiste de son PBN mal-posé qui
dans ce cas cours de grands risque d'être instable (donc inutilisable),
mais d'en calculer une approximation dans un voisinage des solutions
admissibles qui aurait la propriété d'être fortement
stable. L'approche par régularisation permet de calculer de telles
solutions.
Dans le chapitre suivant, après avoir
présenté les différentes techniques de
régularisation développées jusqu'ici dans la
littérature, nous exposons un algorithme de résolution des PBN
dans le cas de la non unicité développé par S.Dempe en
2000 basé sur l'approche par régularisation. Nous-nous pencherons
enfin sur l'étude de la convergence de cet algorithme.
CHAPITRE TRIS
Approche de résolution par
régularisation
des PBN dans le cas de la non unicité.
Où
(y) = Argmin
x
Mémoire de DEA * Laboratoire
d'analyse numérique * UYI Francisque.D.Fouodji
c~UYI 2007-2008
Soit le PBN :
|
\ min
y
|
{ }
» F (x, y) : y ? Y, x ? (y)
(3.1)
|
{ }
f(x, y) : g(x, y) = 0, h(x, y) = 0 (3.2)
Y est un fermé deRm
F : Rn × Rm -?
R, f : Rn × Rm -? R
g :
Rn × Rm -? Rq, h :
Rn × Rm -? Rk
Nous voulons résoudre (3.1 - 3.2) dans le cas où le
problème du suiveur
{ }
min f(x, y) : g(x, y) = 0, h(x, y) = 0 (3.3)
x
n'admet pas une solution unique.
Au chapitre deux, nous avons vu qu'on peut pour ce faire
utiliser l'approche optimiste ou l'approche pessimiste; mais il nous a
été donné de constater que ces deux approches
présentent de graves défauts dont certains (par exemple le
problème d'instabilité de la solution) peuvent être
contournés tandis que d'autres, (par exemple le problème
d'éloignement de la solution optimiste ou péssimiste de la
solution optimale du PBN) n'ont pas encore pu être résolus.
Pour éviter ces défauts, une autre approche a
été développée dans la littérature et fait
actuellement l'objet de nombreuses recherches : c'est l'approche par
régularisation. A ce jour on distingue deux techniques de
régularisation : la régularisation de Tykhonov et la
régularisation par l'élément de plus petite
norme.
3.1 La régularisation de Tykhonov
Cette technique consiste à introduire un
paramètre (dit de régularisation) dans le problème du
suiveur de façon à ce que le nouveau problème (le
problème du suiveur régularisé) admette pour chaque
paramètre de régularisation une solution unique fortement stable.
Cette solution unique converge vers une solution du problème du suiveur
original lorsque le paramètre de régularisation tend vers
zéro (sous l'hypothèse que les fonctions qui définissent
le problème
Approche de résolution par régularisation des
PBN dans le cas de la non unicité. 31
satisfont certaines conditions de régularité).
Par cette technique, la solution obtenue est une approximation
de la solution du PBN original, mais qui a l'avantage d'être stable et
qui parfois est même meilleure que la solution optimiste ou
péssimiste.
Lemme 3.1.1. Si le problème du suiveur (3.3) est
convexe, (i.e les fonctions f(. , y), gi(. ,
y) i = 1, ... ,p sont convexes et les fonctions
hj(. , y) j = 1, ... ,q sont affines
linéaires sur Rn pour y fixé dans
Rm.)
Si en plus F(., y) est strictement convexe pour
y fixé dans Rm, alors :
(i) la fonction f(. , y) +
áF(. , y) est strictement convexe Vá >
0 Vy E Rm ;
(ii) le problème
{ }
min f(x, y) + áF(x, y)
: g(x, y) < 0, h(x, y) = 0 (3.4)
x
admet une solution unique pour tout á > 0
tel que l'ensemble des solutions admissibles de (3.4) est non vide.
preuve :
(i) Montrons que f(. , y) +
áF(. , y) est strictement convexe Vá >
0 Vy E Rm. Soient y E Rm ,
á > 0, x, z E Rn, t E [0,
1]
on a :
f(tx + (1 - t)z, y) <
tf(x, y) + (1 - t)f(z, y) (car f(.
,y) est convexe)
~áF(tx + (1 - t)z, y) <
á~tF(x, y) + (1 - t)F(z, y)
(car F(. ,y) est strictement convexe ) < átF(x, y)
+ á(1 - t)F(z, y).
d'où
f(tx+(1-t)z,
y)+áF(tx+(1-t)z, y) < t(f(x,
y)+áF(x,
y))+(1-t)(f(z,
y)+áF(z, y)) Donc f(.,
y) + F(., y) est strictement convexe.
(ii) Soit á > 0 tel que l'ensemble des
solutions admissibles de (3.4) est non vide.
Montrons que (3.4) admet une solution unique ;
Supposons que (3.4) admet deux solutions distinctes
{x(y)}et{z(y)}. g étant
convexe et h affine linéaire, pour y fixé dans
Rm, 2x(y) + 2z(y) est une
solution admissible de (3.4). En effet,
g (1x(y) +
2z(y),y) ~
2g(x(y),y)
+12g(z(y),y) ~
2.0+ 12.0 = 0
h (x(y) +
2z(y),y) =
2h(x(y),y) +
2h(z(y),y) = 2.0+
12.0 = 0
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
Approche de résolution par régularisation des
PBN dans le cas de la non unicité. 32
Puisque f(. , y) + áF(. ,
y) est strictement convexe,
f (x(y) +
2z(y), y + áF
(2x(y) + 2z(y), y) <
2 (f(x(y), y) +
áF(x(y), y))+
1 ~f(z(y), y) +
áF(z(y), y)
2
<
2min { f(x, y) + áF(x,
y) : x E M(y)}+
x
1
2
{ }
min f(x, y) + áF (x,
y) : x E M(y)
x
{ }
< min f(x, y) + áF
(x, y) : x E M(y)
x
ce qui est absurde.
Si les assertion du theorème1.3.1 sont satisfaites,
alors
|
Øá(y) = Argmin
x
|
{ }
f(x, y)+áF(x, y) :
g(x, y) < 0 , h(x, y) = 0 est
semi-continue supérieurement.
|
La régularisation de Tykhonov consiste à remplacer
le problème (3.1)-(3.2) par :
{ }
min F(x, y) : y E Y, x E
Øá(y) (3.5)
y
|
Où
|
Øá(y) = Argmin
x
|
{ }
f(x,y) + áF(x,y) :
g(x,y) < 0 ,h(x,y) = 0 (3.6)
|
F : 1[8n x 1[8m -? 1[8 est
strictement convexe par rapport à la première variable; f
: 1[8n x 1[8m -? 1[8 ainsi que toutes les fonctions
composantes de g : 1[8n x 1[8m -? 1[8p
sont convexes par rapport à la première variable; h
: 1[8n x 1[8m -? 1[8kest affine
linéaire sur 1[8n par rapport à la première
variable. Le problème du suiveur régularisé est
défini par :
min
x
{ }
f(x,y) + áF(x,y) :
g(x, y) < 0, h(x, y) = 0 (3.7)
L'idée d'utiliser cette méthode est due à
A.N.Tykhonov [25]. On a le résultat suivant :
Théorème 3.1.1. Si les assertions (C), (MFCQ)
sont satisfaites pour (3.5)-(3.6) en y = y° et si V
xxF(x, y) est définie positive en tout
point (x, y), alors :
(i) l'unique solution optimale
xá(y) E Øá(y)
est fortement stable pour tout á > 0 et est
directionnellement différentiable.
(ii) Pour tout á > 0, on a les
inégalités suivantes :
F(xá(y), y) < min {
}
F (x, y) : x E
Ø(y)
x
f(xá(y), y) >
?(y) = min { }
f(x, y) : g(x, y) <
0, h(x, y) = 0
x
(iii) Pour y fixé dans 1[8m
,
{ }
lim ~xá(y)~ =
Argmin F(x, y) : x E Ø(y)
á?)+ x
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
Approche de résolution par régularisation des
PBN dans le cas de la non unicité. 33
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
Preuve :
On se place sous les hypothèses du
théorème.
(i) Puisque (3.4) est un problème d'optimisation
paramétrique convexe et que V xxF(x, y) est définie
positive, les conditions du théorème 1.3.1 sont satisfaites [26]
; d'où xá(y) est fortement stable pour tout á
> 0 et est directionnellement différentiable.
(ii) On a g(xá(y), y) < 0 et
h(xá(y), y) = 0
d'où
f(xá(y), y) >_ min {f(x,y) :
g(x, y) < 0, h(x, y) = 0} = ?(y).
Montrons que F(xá(y), y) < min {
}
F (x, y) : x E Ø(y)
x
Supposons que
F(xá(y), y) > min { }
F (x, y) : x E Ø(y)
x
alors
x E Ø(y) = {?(y), y E Rm} :
F(xá(y), y) > F(x, y)
d'où
?y0 E IIBm : áF
(xá(y0), y0) > áF
(?(y0), y0) (car á > 0)
Or on a
f(xá(y), y) >_ ?(y) Vy E
118m
donc
f(xá(y0), y0) +
áF(xá(y0), y0) >
?(y0) + áF(x, y0) ce qui contredit le fait que
xá(y) E Øá(y).
(iii) D'après (ii), on a F(xá(y), y)
< min { }
F (x, y) : x E Ø(y)
x
Puisque F est continue, on a :
lim
á?0+
d'où
F(xá(y), y) = F (áli
ô+ xa(y), y) = min {F(x, y) : x E
Ø(y)}
x
{ }
lim ~xá(y)~ = Argmin F (x, y)
: x E Ø(y)
·
á?0+ x
L'assertion (iii) de ce théorème peut être
interprétée comme suit : pour y fixé dans Rm,
lorsque á tend vers 0+, l'unique solution du
problème du suiveur régularisé par la méthode de
Tykhonov converge vers la solution du problème original du suiveur, qui
permet au leader de minimiser sa fonction objectif.
Ainsi, {xá(y)} tend
(lorsque á --* 0+) vers la solution du
problème du suiveur recherchée dans l'approche optimiste.
L'avantage ici est que xá(y) est fortement stable et
même lorsque l'approche optimiste n'est pas envisageable, cette
approximation de la solution du PBN pourra être atteinte.
En utilisant le concept de å-optimalité,
S.Addoune dans [27] énonce une autre version du théorème
précédent. Avant d'y arriver, Commençons par
définir la notion de solution å-optimale.
Approche de résolution par régularisation des
PBN dans le cas de la non unicité. 34
Définition 3.1.1. Soit e > 0
Une solution e-optimale du problème du suiveur
(3.7) est un élément de l'ensemble
{ }
Tá,E(y) := x E M(y) : f(x, y)
+ áF(x, y) < ?á(y) + e
Où M(y) est l'ensemble des solutions admissible
de (3.7) et
{ }
?á(y) := min f(x, y) + áF
(x, y) : x E M(y)
x
Théorème 3.1.2. Soit á > 0 , e >
0
Si l'assertion (C) est satisfaites pour le problème du
suiveur (3.4), alors il existe une constante c telle que
Tá,E(y) C
T0,E+ác(y) pour tout y E
Y
Preuve :
{ }
D'après (C) K = (x, y) E Rn x Y :
x E M(y) est compact. Puisque F est continue, il existe
des réels b et c tels que
b < F(x, y) < b + c V(x, y)
tels que y E Y et x E M(y)
Ceci implique que
f(x, y) + áF(x, y) > ?(y) + áb
V(x, y) tels que y E Y et x E
M(y)
{ }
Où ?(y) = ?0(y) = min f(x, y) : x E
M(y) .
x
Soit x E Tá,E(y)
alors,
f(x, y) + áb < f(x, y) + áF(x, y)
< ?á(y) + e (par definition de
Tá,E(y))
i.e
f(x,y) + áb < min
x
< min
x
{ }
= min f(x, y) : x E M(y) + á(b + c) +
e
x
{ }
f(x,y) + áF(x,y) : x E M(y) + e
{ }
f(x,y) + á(b + c) : x E M(y) + e
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
d'où
f(x, y) < ?(y) + ác + e
i.e x E T0,E+ác(y) donc
Tá,E(y) C
T0,E+ác(y) pour tout y E Y
Dans le théorème précédent,
T0,E+ác(y) représente l'ensemble des
solutions (e+ác)-optimale du problème du suiveur
original pour le paramètre fixé y, donc plus
rigoureusement, on devrait écrire TE+ác(y)
au lieu de T0,E+ác(y).
Le théorème que nous allons à
présent énoncer permet de comparer la solution du problème
régularisé et celle du problème original.
Approche de résolution par régularisation des
PBN dans le cas de la non unicité. 35
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
Théorème 3.1.3. Si les hypothèses du
théorème 3.1.2 sont satisfaites, alors pour tout x ?
Wá,å(y), y ? Y on a :
min {F(x, y) : x ? W(y)} + a = F(x, y) = min
{F(x, y) : x ? W0,å+ác(y)}
x x
Ceci implique que :
et
x,y
min {F(x, y) : x ? W(y)} + á = min
{F(xá,å(y), y) : x ? W(y)}
y
min {F(xá,å(y),y)
: x ? W(y)} = min {F(x, y) : x ?
W0,å+ác(y), y ? Y}
y x,y
Où xá,å(y) ?
W0,å+ác(y) ?y
Preuve :
Soit y ? Y, x ? Wá,å(y) alors,
{ } {F(x(y), y) : x ?
W0,å+ác(y)}
F(x, y) = min F(x, y) : x ? Wá,å(y) = min
x y
(car Wá,å(y) ? W0,å+ác(y)
pour tout y ? Y )
D'autre part, on a par définition :
{ }
f(x, y) + áF(x, y) = ?á(y) + å =
min f(x, y) + áF(x, y) : x ? M(y) + å
x
= min
{} + å (carW(y) ? M(y)) f(x,y) +
áF(x, y) : x ? W(y) { }
x
= min
x
= ?(y) + min
x
= f(x, y) + á min
?(y) + áF(x,y) : x ? W(y) + å
{ }
áF(x,y) : x ? W(y) + å
{ }
x
d'où donc
F(x, y) : x ? W(y) + å
F(x, y) = min {F (x, y) : x ?Ø(y)} +
a
min {F(x, y) : x ? W(y)} + a = F(x, y) = min
{F(x, y) : x ? W0,å+ác(y)}
x x
En prenant le minimum de chaque membre de ces
inégalités, on obtient la dernière implication du
théorème.
·
Le corollaire suivant découle de la dernière
implication du théorème 3.1.3 :
Corollaire 3.1.1. Sous les hypothèses du
théorème 3.1.2, si á?0+å?0+tel
que åá?0, alors
{ } { }
min F(x, y) : x ? Wá,å(y) -? min F(x,y) : x ?
Ø(y)
x x
|
et
|
{ } { }
min F(x, y) : x ? Wá,å(y), y ? Y -? min F(x,y) : x
? W(y), y ? Y
x,y x,y
|
Approche de résolution par régularisation des
PBN dans le cas de la non unicité. 36
Notons que les assertions du théorème 3.1.1 ne
sont pas toujours vérifiés lorsque simultanément on fait
tendre á vers 0+ et y vers y0. L'exemple 3.1.1
illustre ce fait :
Exemple 3.1.1. Soit le PBN
n o
y
min (x - y)2 + y2 : -20 < y < 20, x E
Ø(y)
|
Où
|
Ø(y) = Argmin nxy : -y - 1 < x < -y +
1o
x
|
Le problème régularisé correspondant par
la méthode de Tykhonov est :
n o
min (x - y)2 + y2 : -20 < y < 20, x E
Øá(y)
y
|
où
|
Øá(y) = Argmin
x
|
n o
xy + á(x - y)2 + áy2 : -y -
1 < x < -y + 1
|
Posons
F(x, y) = (x - y)2
f(x, y) = xy
fá(x, y) = xy + á(x - y)2 +
áy2
On a
V2 xxF(x, y) = 2 > 0 d'où F
est strictement convexe.
V2xxf(x, y) = 0 d'où f
est convexe.
Donc le problème régularisé admet une
solution unique pour chaque paramètre de régularisation.
On a
Vxfá(x, y) = y + 2á(x - y) =
2áx + y(1 - 2á) Vxfá(x,y) = 0 ~x =
y(1 - 2a)
Dont le seul point critique est x = y(1 -
12á), pour á fixé. posons 0 <
á < 41
-y - 1 < x < -y + 1 ~-y - 1 < y(1 -21á) < -y
+ 1
|
?
|
2á
|
< y <
|
2á
|
|
4á - 1
|
4á - 1
|
Si y > - 2á
4á-1,
alors puisque 0 < á <
14, y>0
on a
Argmin
x
nxy + á(x - y)2 + áy2 : -y -
1 < x < -Y+11=--Y-- 1
y+1}=--y-1
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
Si y < 2á
|
4á-1
alors y < 0 d'où
|
Argmin
x
|
n o
xy + á(x - y)2 + áy2 : -y -
1 < x < -y + 1 = -y + 1
|
Approche de résolution par régularisation des
PBN dans le cas de la non unicité. 37
|
donc pour 0 < á <
14,
Pour y = 2á, on a
|
xá(y) =
|
{
|
- y - 1 si y > - 2á
4á-1
y(1 - 1 2á) si 2á
4á-1 = y = - 2á 4á-1
- y + 1 si y < 2á
4á-1
|
2á
= y =
2á
4á - 1
4á - 1
d'où xá(y) = y - y2á = y
- 1 Or on a
lim
á?0+
xá(y) = lim y - 1 = -1 =6 0 = Argmin
{x2 : x ? Ø(0)}
x
y?0
Malgré ce défaut, la solution du problème
du suiveur régularisé est plus régulière que les
solutions du problème du suiveur original. En plus
{xá(y)} étant directionnellement
différen-tiable, on peut envisager l'application de l'algorithme de
descente pour la détermination de la solution du PBN [11].
3.2 régularisation par l'élément
de plus petite norme
3.2.1 première méthode
Si la fonction objectif du leader F ne possède pas
toutes les propriétés requises pour que puisse être
appliquée la régularisation de Tykhonov, une autre méthode
dénommée régularisation par l'élément de
plus petite norme peut être appliquée.
Cette méthode consiste à prendre comme
approximation de la solution du problème du suiveur
{x(y)} = Ø0(y) ; (sous réserve que
Ø0(y) est un singleton)
Où pour tout y ? 1[8m
|
Ø0(y) = Argmin
x
|
{kxk : x ? Ø(y)}
|
Cette technique de régularisation à
été utilisée pour la première fois par P.Loridan et
J.Morgan en 1992 dans [28] en appliquant une idée de V.F.Solohovic
émise en 1970 dans [29].
Mais il se trouve malheureusement que l'utilisation de cette
approche ne permet pas de contourner toutes les difficultés
rencontrées dans les approches optimiste et péssimiste respec-
|
tivement. En effet, la fonction Ø0(.) : y 7?
Argmin
x
|
{kxk : x ? Ø(y)} n'est pas en général
|
semi-continue inférieurement. Ceci peut être
observé dans l'exemple suivant :
Exemple 3.2.1. [28] On considère le PBN :
min
y
{ - xy : x ? Ø(y)}
Où
Ø(y) = Argmin {(y - 0.5)x : 0 = x = 1}
x
|
Ø(y) =
|
{
|
{0} si y > 0.5
[0,1] si y = 0.5
{1} si y < 0.5
|
On a
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
Approche de résolution par régularisation des
PBN dans le cas de la non unicité. 38
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
°(y) ={{0}
si y = 0.5
{1} si y < 0.5
d'où
(
0 si y = 0.5
F(x(y), y) =
-y si y < 0.5
Où {xá(y)} =
Ø°(y)
L'infimum de F sur [0,1] est égal à
-0.5 Pourtant, il n'existe pas de y appartenant à
[0,1] tel que F(x(y),y) = -0.5
donc Ø°(.) n'est pas
semi-continue inférieurement.
Il est tout de même possible de contourner cette
difficulté. Ceci se fait en utilisant à nouveau le concept de
solution å-optimale.
On pose :
|
Ø°E(y) = Argmin
x
|
n o
kxk : x ? ØE(y)
|
Où
n o
ØE(y) = x ? M(y) : f(x, y) = ?(y) +
å
Si le problème (3.4) est convexe, alors
ØE(y) est réduit à un singleton sous
réserve que Ø(y) =6 Ø [11]. On alors note xE(y)
l'unique élément de ØE(y).
On a le théorème suivant :
Théorème 3.2.1. [28]
On considère le problème d'optimisation
paramétrique convexe (3.3) en y = y°.
Si les assertions (C) et (MFCQ) sont satisfaites en tout
point (x, y°) avec x ? M(y°),
alors
E?°+
lim xE(y) = x°(y)
preuve : On a
n o n o
x ? M(y) : f(x,y) = ?(y) ? x ? M(y) : f(x,y) = ?(y) + å
?å > 0
i.e
Ø°(y) ? ØE(y) ? å > 0
ainsi
x°(y) ? ØE(y)
d'où
xE(y) = min kxk, x ? ØE(y) =
x°(y) < +8, ? å > 0
x n o
Donc la suite {xE(y)}E est borné et
par conséquent admet un point d'accumulation x.
Ainsi, la suite {xE(y)}E admet une sous
suite que nous notons encore {xE(y)}E qui converge vers
x
Or
xE(y) ? M(y) et f(xE(y), y) = ?(y) + å ?å
> 0
Approche de résolution par régularisation des
PBN dans le cas de la non unicité. 39
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
d'où lorsque å ? 0+, x ? M(y) et f(x, y)
= ?(y) i.e
x ? Ø0(y) = Ø(y)
|
Par ailleur, on a
i.e
|
kxk = lô
å
|
Ilxå(y) Ilx0(y)
Il
|
kxk = Ilx0(y) avec x, x0(y) ? Ø(y)
d'où x = x0(y) par unicité de
l'élément de plus petite norme de Ø(y) = Ø0(y)
(grace à la convexité du problème (3.3))
·
Ainsi, le PBN régularisé par la méthode de
la plus petite norme s'écrit :
n o
min F (xå(y), y) : y ? Y
y
|
Où {xå(y)} = Argmin
x
|
n o
kxk : x ? Øå(y) ,å > 0
|
|
Posons
|
S = {(x,y) : y ? Y, x ? Ø(y), F(x, y) = inf
?p(z) }
|
Où
n o
?p(z) = max F (x, z) : x ? Ø(z)
x
S est l'ensemble des solutions admissibles du problème
du leader qui sont plus bonnes que la solution péssimistique du PBN
(3.1)-(3.2). On l'appelle ensemble des sous-solutions optimales de
(3.1)-(3.2).
On a le résultat suivant :
Théorème 3.2.2. [28]
On suppose que le problème du suiveur (3.3) est
convexe et que les assertions (C) et (MFCQ) sont satisfaites en tout point
(x, y), x ? M(y) et y ? Y .
Pour toute suite (åk)k
(åk > 0 ?k) convergeant vers
0+, on considère la suite
(yk)k tel que
|
yk ? Argmin
y
|
n o
F(x, y) : x ? Ø0
åk(y), y ? Y ?k.
|
Tout point d'accumulation (x, y) de la suite
{xåk(yk), yk}8k=1 est une sous-solution
optimale du PBN (3.1)-(3.2) ; i.e (x, y) ? S.
Preuve :
n o
Posons K = (x, y) ? Rn × Y : x ? M(y) ;
d'après (C), K est compact.
Soit (x, y) un point d'accumulation de
{xåk(yk), yk}k=1 ( qui existe car
(xåk(yk), yk) ? K ?O ;
|
On veut montrer que (x, y) ? S, i.e F(x, y) = inf
z
|
?p(z).
|
|
Supposons que F(x, y) > v = inf
z
|
?p(z).
|
{xåk(yk),yk}8k=1
admet une sous-suite que nous notons encore
{xåk(yk),yk}8k=1
qui converge
Approche de résolution par régularisation des
PBN dans le cas de la non unicité. 40
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
vers (x, y). Soit
(F (x, y) - v)
0 < ä <
3
Puisque F est continue,
F (xåk(yk),
yk) -?
k--00 F(x, y)
d'où
~~ < ä
?K1 ? N : k > K1 =
~~F(xåk(yk),
yk) - F(x, y)
= -F(xåk(yk),
yk) + F(x, y) <
ä
= F (xåk(yk),
yk) > F(x, y) -
ä > 3ä + v - ä
= F(xåk(yk),
yk) > v + 2ä
Puisque K est compact et ?p semi-continue
inférieurement, v est fini et ?z ? P2(K) : v =
?p(z)
z
z ? P2(K) =
?(zt) ? P2(K) :
zt -?
t--00
= ?(zt) ?
P2(K) :
?p(zt)
-??p(z) = v
t--00
d'où ?t1 ? N : t > t1 =
?p(zt) = v +
ä.
zt.
Soit t > t1 fixé. Puisque zt
? P2(K),
?(vk)k ?
P2(K) : vk -?
k--00
Soit la suite (uk)k
définie par uk ?
Øåk(vk) ?k
{ }
F(x, zt) : x ?
Ø(zt)
Soit u un point d'accumulation de
(uk)k (qui existe car
(uk)k ? P2(K)) ;
d'après le theorème 3.2.1, u ?
Ø(zt) ;
d'où
F(u, zt) =
?p(zt) = max
x
(uk)k admet une
sous-suite que nous notons encore (uk)k
qui converge vers u ; étant donné que F est
continue, on a :
|
d'où
|
F(uk, vk)
-?
k--00
|
F(u, zt)
|
?K2 ? N : k > K2 =
F(uk, vk) = F
(u, zt) + ä =
F(uk, vk) =
?p(zt) + ä
Ainsi pour t > t1 et k > max
(K1, K2), on a
F(uk, vk)
= ?p(zt) +
ä = v + 2ä <
F(xåk(yk),
yk)
|
Ce qui contredit le fait que yk ? Argmin
y
|
{ }
F(x, y) : x ? Ø0
åk(yk), y ? Y .
|
|
donc F(x, y) = inf
z
|
?p(z).
·
|
Ce théorème montre qu'en résolvant le PBN
(3.1)-(3.2) en utilisant cette méthode, on aboutit à une solution
qui est meilleure que la solution pessimiste.
Approche de résolution par
régularisation des PBN dans le cas de la non unicité.
41
3.2.2 Deuxième méthode
Si la fonction objectif du leader ne possède pas les
propriétés nécessaires pour l'application de la
régularisation de Tykhonov, une autre méthode de
régularisation de(3.1)-(3.2) consiste à remplacer le
problème du suiveur par :
{ }
min f(x, y) +
á11x112 : x E
M(y) pour á > 0 (3.8)
x
Soit Wá l'ensemble des solutions de (3.8)pour
y fixé; Le PBN régularisé s'écrit alors
:
{ }
min F(x, y) : y E Y, x E
Wá(y) (3.9)
y
|
Où
|
Wá(y) = Argmin
x
|
{ }
f(x, y) +
á11x112 : x E
M(y) (3.10)
|
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
Des relations entre le problème
régularisé (3.9)-(3.10) et le problème original
(3.1)-(3.2) sont présentées dans [28].
On a le théorème suivant :
Théorème 3.2.3. Considérons les
problèmes (3.3) et (3.8). Si les assertions (C) et (MFCQ) sont
satisfaites, alors :
1) Pour toute suite (yk)k
avec yk E Y Vk et
(ák)k C 1[8+ convergeant vers y et
á respectivement, toute suite (xk)k
satisfaisant xk E
Wák(yk) V k, admet un point
d'accumulation x tel que x E Wá(y)
2)
lim
yk?y ák&0
Pour á = 0, on a :
xák(yk) =
x(y)
Sous réserve que W(y) =
{x(y)}
Preuve :
1)
xk E Wák(yk)
Vk = g(xk, yk) < 0
et h(xk, yk) = 0
{ }
= (xk, yk)k C
K := (x,y) E 1[8n X 1[8m :
g(x,y) < 0, h(x, y) = 0
d'après l'assertion (C), K est compact.
Si on note P1(K) la première projection
de K sur 1[8n, puisque P1 est continue,
P1(K) est compacte.
(xk)k C P1(K) =
(xk)k admet un point d'accumulation
x
montrons que x E Wá(y)
D'après le théorème 1.4.2,
W.(.) est semi-continue supérieurement.
(xk)k admet x comme point d'accumulation implique
que (xk)k admet une sous-suite que nous notons encore
(xk)k qui converge vers x.
xk E Wák(yk)
Vk = x E Wá(y) (car
W.(.) est semi-continue sup)
Approche de résolution par régularisation des
PBN dans le cas de la non unicité. 42
D'après le théorème 1.4.2, x.(.)
est continue d'où
lim
yk?y ákN0
xák(yk) = x(y)
·
Notons qu'en général, sans l'hypothèse
Ø(y) = {x(y)} ; on n'a pas
|
lim
yk?y ák&0
|
xák(yk) = x(y) ?
Argmin
x
|
{ }
kxk : x ? Ø(y)
|
L'exemple suivant illustre ce fait :
Exemple 3.2.2. On considère le problème
:
{ }
min xy : x ? [-1, 1]
x
|
on a
|
Ø(y) =
|
{ [-1,1] si y = 0 {-1} si y > 0
{1} si y < 0
|
Le problème régularisé est
{ }
min xy + áx2 : x ? [-1, 1]
x
On a ?x(xy + áx2) = y +
2áx ?x(xy + áx2) = 0 ? x = -y2á
en plus, ?2 xx(xy + áx2) = 2á > 0
-1 = x = 1 ? -1 = - y = 1
2á
?-2á = y = 2á
donc
{
Øá(y) =
{-y2á} si y ? [-2á,
2á]
{1} si y = -2á
{-1} si y =
2á
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
la suite
(xák(yk))k = (-k)
n'admet pas de limite dans [-1,1] lorsque yk ? 0
et ák ? 0
{ }
alors que Argmin x |x| : x ? Ø(0) =
{0}
On montre que si (3.3) est convexe, alors pour á > 0
fixé, le problème (3.8) admet une solution unique et le fonction
xá(.) est continue [28]
pour á > 0 fixé et Sous certaines conditions
(que nous mentionnerons par la suite) l'unique solution optimale de (3.8) est
Lipschitz-continue par rapport à á et y.
Il s'ensuit que le PBN régularisé
min
y
{Fá(y) := F(xá(y), y) : y ? Y} (3.11)
est un problème de minimisation d'une fonction
Lipschitz-continue, et par conséquent peut être résolu par
un algorithme du paquet.
Nous allons dans la paragraphe qui suit présenter un
algorithme développé par S.Dempe [12] qui résoud les PBN
dans le cas de la non unicité en se basant sur cette méthode de
régularisation.
Approche de résolution par
régularisation des PBN dans le cas de la non unicité.
43
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji
c~UYI 2007-2008
3.3 Algorithme de résolution d'un PBN dans le
cas de la non unicité
Nous allons présenter l'algorithme lorsque le
problème du suiveur n'est pas soumis à la contrainte
h(x, y) = 0. Le problème du suiveur
régularisé est alors donné par
{ }
min f(x, y) +
ákxk2 : g(x, y) = 0
(3.12)
x
On suppose que les assertions (C), (MFCQ) et (CRCQ) sont
satisfaites. Ceci nous garanti que la fonction
x.(.) qui à
(á,y) associe la solution de (3.10) pour le paramètre
á > 0 et y fixé est une PC-function; et par
conséquent est Lipschitz-continue. Le problème consiste donc
à minimiser la fonction Lipschitz-continue
Fá(y).
3.3.1 La methde du paquet
L'algorithme que nous présentons dans cette section est
un algorithme du paquet. Cet algorithme se construit à partir de la
méthode du paquet, qui est une généralisation de la
méthode de descente (connue en optimisation diérentiable)
à des fonctions qui ne sont pas diérentiables, mais au moins
Lipschitz-continue.
F(y)
Rappelons qu'une méthode de descente pour la recherche de
y telle que F(y) = min
y
consiste à construire la suite
(yn)n
vérifiant :
1. initialisation : y0 donné;
2. nime itération :
on suppose y1, y2, ..., yn
connus;
a) chercher dn une
direction de descente stricte en yn ; i.e
chercher dn tel que ? p0 >
0 avec
F(yn +
pdn) <
F(yn) ?p ?]0,
p0]
b) prendre yn+1 = yn
+ pdn (avec p
bien choisi). On a le Lemme suivant :
Lemme 3.3.1. Soit y ?
Rm.
Si F ?
C1(Rm, R) et
si ?F(y) =6 0; alors w = -?F(y) est une direction de
descente stricte en
y.
Preuve :
Soit ? la fonction de R dans R définie par
?(p) = F(y + pw)
Puisque F est C1,
? ? C1(R,R) et
?'(p) = w.?F(y + pw)
.
Supposons que ?F(y) =6 0.
On veut montrer que ?p0 > 0 tel que si
p ?]0, p0] alors F(y + pw) <
F(y); ou encore que ?(p) <
?(0).
On a
?'(0) = w.?F(y) = -
|?F(y)|2 < 0
Approche de résolution par régularisation des
PBN dans le cas de la non unicité. 44
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
d'où comme ?' est continue, il existe
ä0 > 0 tel que si ñ E [0,ä0]
alors ?'(ñ) <
0.
Soit ñ E]0, ä0]. Alors
f
?(ñ) - ?(0) = J
cp'(t)dt < 0
(car Vt E]0, ñ],
?'(t) < 0)
o
donc on a
?(ñ) < ?(0) Vñ
E]0, ä0]
Il suffit donc de prendre ñ0 = ä0 pour
conclure.
·
Ce lemme nous montre que lors de la minimisation d'une fonction
différentiable F, pour trouver une direction de descente stricte en un
point y il suffit de considerer la direction
d = -VF(y). Le prototype de
l'algorithme de descente pour la minimisation des fonctions
différentiables est donc :
Entrée : y0 donné ;
Sortie : la suite (yn)n
On suppose y1, y2, ..., yn connus ;
a) calculer dn =
-VF(yn)
b) prendre yn+1 = yn +
ñdn (avec ñ bien choisi).
Supposons à présent que F est juste
Lipschitz-continue ; alors le gradient de F n'existe pas en tous points
y, mais on peut calculer en ces points un gradient
généralisé (par exemple le gradient
généralisé au sens de Clarke). On montre [30] que si
v(y) est le gradient généralisé au sens
de Clarke de F en y, alors d = -v(y) n'est
pas forcément une direction de descente stricte de F en y.
Dans la méthode du paquet, on commence par calculer le
gradient généralisé de F en y; si la direction
opposée à celle de ce gradient (d =
-v(y)) est une direction de descente stricte, on
construit un nouveau point z = y + ñd qui
améliore la fonction F.
Sinon on cherche une autre direction de descente. On montre
[11] qu'en général, si {yi}ki=1 et {zi}ki=1 sont des points
d'éssaie et des itérées déjà
évalués, la direction d qui minimise le modèle
max1
ik {v(yi)d -
áik} + F(zk) + (2t )dT d
(3.13)
1< k
Avec áik = F(zk) -
v(yi)(zk - yi) - F(yi) est une
direction de descente stricte de F en zk. Nous avons déjà
présenté le prototype de l'algorithme du paquet à la
section 1.5.1 du chapitre un.
3.3.2 Présentation de l'algorithme
Le principe de l'algorithme est le suivant : pour la valeur
fixée á0 du paramètre de régularisation et pour
å0 > 0, utiliser l'algorithme du paquet que nous avons
présenté au chapitre un pour calculer la solution
å0-optimale z0 du problème régularisé de
paramètre á0 ; ensuite considerer un nouveau paramètre
á1 < á0 et å1 < å0 et calculer la solution
å1-optimale z1. Si z1 est meilleure que z0, alors
z1 est une itérée; sinon y1 =
z1 est un point d'éssaie (ce point sera utilisé
pour le calcul d'une nouvelle direction de descente en z0). Ainsi de
suite jusqu'à ce que soit satisfait un certain critère
d'arrêt (qui ici portera sur å).
le prototype de cet algorithme est le suivant :
Approche de résolution par régularisation des
PBN dans le cas de la non unicité. 45
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
étape1 : Choisir å0, á0 et un
point de départ z0
initialiser s := 0
étape2 : Avec comme point de départ zs,
calculer en utilisant l'algorithme du paquet une solution ås-optimale
zs+1 du problème (3.11)
étape3 : Poser ås+1 := ås2 ,
ás+1 := ás2 , s := s + 1 et
répéter l'étape 1 jusqu'à ce qu'un critère
d'arrêt soit satisfait.
On montre [30] que si la valeur de ás n'est
pas très petite, l'étape 2 peut s'effectuer en un nombre fini
d'itérations ; ceci est également garanti si la suite
(zs)sEN obtenue en appliquant l'algorithme converge vers un point z
où l'unique solution x0(z) du problème du suiveur est fortement
stable.
Utilisant ce prototype, K.C.Kiwiel dans [30] construit un
algorithme qui consiste en une suite d'applications de l'algorithme du paquet
à différents problèmes. Lors de l'utilisation de cet
algorithme, les itérées zs calculées sont
réutilisées même lorsqu'elles ne permettent pas d'avoir une
décroissance significative de Fá par rapport aux
itérées calculées précédemment ; ce qui peut
conduire au pire des cas à un recommencement infini de l'algorithme(on
dit que l'algorithme boucle).
C'est face à ce défaut de l'algorithme de
K.C.Kiwiel que S.Dempe dans [12] a proposé un nouvel algorithme :
l'algorithme du paquet modifié.
Cet algorithme consiste à : étant donné
le paramètre ás à la sme
itération, déterminer l'itérée zs
qui permet à Fás(zs) =
F(xás(zs), zs) d'approximer au mieux
F(x(zs), zs) ; ensuite faire décroître
ás et ne considérer que les zs
significatifs.
On note v(y) le gradient généralisé de
Fás(y). D'après [30] ; on a
{?xF~xá(y), y~d + ?yF~xá(y),
y : d E ?yxá(y)}
v(y) E
Soit {yk}sk=1 une suite de points d'essaie;
{zk}sk=1la suite d'itérées
calculées jusqu'à l'étape s. On considère le
modèle suivant :
{ } + Fá(zs) + usdT
d
max v(yk)Td - âk,s
2 (3.14)
kEJs
Où Js ? {1,...,s};us > 0 et
âk,s = Fá(zs) -
v(yk)(zs - yk) -
Fá(yk)
Comme nous l'avons déjà mentionné au
chapitre un, le réel d qui minimise le modèle (3.14) est une
direction de descente pour Fá(y) en y = zs.
Soit å > 0 le réel positif tel que
?å' = å , (3.12) n'admet pas de solution
å'-optimale. å est appelé seuil
d'optimalité. Soit %s > 0 le rayon de la
région de confiance (c'est le rayon de la plus petite boule dans
laquelle on est sûr de trouver une solution). Soit mL un paramètre
positif (paramètre de recherche en ligne [12]). Soit us =
umin > 0 , ás le coefficient de régularisation et
ds le réel qui minimise (3.14).
On pose
s - 1
ås := max mp(IIusdsII
+Eçsjâj,s) , jEmax0{IIyj
- zjII+EIIzk+1 - zkII}
jEJs k=j
Approche de résolution par régularisation des
PBN dans le cas de la non unicité. 46
Où (7sj)j sont les multiplicateurs
de lagrange du problème de minimisation de (3.14) et
Js ? {j : 7s j =6 0}
Es est utilisé pour mesurer la qualité de
l'approximation zs de la solution du PBN calculé à la
seme iteration. Durant la procédure Es doit tendre
vers 0 ; mais pour des raisons pratiques, (impossibilité de trouver des
solutions E'-optimale pour les valeurs de E' plus petite
qu'une certaine valeur seuil) on arrête l'algorithme si Es
< E.
Soit k = 1 une certaine constante utilisée
pour borner le changement de la région de confiance. 81 un
paramètre donné.
Les principales étapes de l'algorithme sont les suivantes
:
Algorithme du paquet modifié
Entrée : Suite d'itérée
{zk}sk=1, les points d'essaie {yk}sk=1, les
paramètres ás > 0, Es
> 0, us, Ss
Sortie : Une meilleure itérée
zs+1. Etape1 :
a) Calculer en augmentant si nécessaire la valeur de
us, le réel ds qui minimise le
modèle (3.13) ainsi que les multiplicateurs de Lagrange
çsj, j E Js tel que
MsII < Os
b) Tester le critère d'arrêt Es
< E, réduire Es et Js
si nécessaire. Si Es < Ss
alors
Ss := ùSs
Etape2 :
n o
Si Fás(zs +
ds) <
Fás(zs) + mL max
v(yk)T ds - âk,s
alors
k?Js
zs+1 := zs +
ds, ts := 1
Sinon
a) Rechercher ts > 0 tel
que
Fás(zs +
tsds) <
Fás(zs) +
mLts max
{v(yk)Tds ?
âk,s}
k?J l
et faire zs+1 :=
zs + tsds
b)Ou considerer que l'étape est nulle et calculer
un nouveau point d'essaie yk+1 := zs +
tds avec t > 0
ts := 0
Si t > 0, calculer un nouveau coefficient de
régularisation ás+1 E]0,
ás] tel que
Fás+1(zs+1)
- Fás(zs) <
0.5
(Fás(zs+1)
- Fás(zs)~ , ys+1
:= zs+1
Sinon
ás+1 := ás
Etape3 : Choisir un nouveau rayon de la région de
confiance Os < êSs
Réactualiser l'ensemble Js et les autres
paramètres. Calculer le gradient généralisé de la
fonction Fás+1(y) au point y =
ys+1 Faire Ss+1 :=
Ss,s := s + 1 et
répéter l'étape 1.
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
Approche de résolution par régularisation des
PBN dans le cas de la non unicité. 47
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
La méthode pour la recherche de ts à
l'étape 2 et la méthode utilisé pour le choix de la
région de confiance peuvent être trouvées dans [30].
Pour l'étude théorique, on choisi le seuil
d'optimalité å = 0. L'algorithme précédent
génère une suite (ás,
xás(zs))s qui théoriquement est
infinie. Si (ás)s converge vers zero, alors le
problème est résolu avec succès.
La modification apporté par ce nouvel algorithme
réside dans le contrôle de la région de confiance, en
posant que %s < êäs ave ê
> 1. L'ajout de ce contrôle garanti que que toutes les
itérées et points d'essaie générés durant
l'exécution de l'algorithme ont toujours un intérêt.
Étant donné que l'algorithme
génère une suite (zs)s ayant une
infinité de termes (du point de vu théorique), il est impossible
de le dérouler manuellement sur un exemple de PBN donné.
Néanmoins, dans le paragraphe qui suit, nous allons étudier la
convergence théorique de l'algorithme du paquet modifié afin de
montrer que la suite (zs)s calculée converge vers
une approximation de la solution du PBN original qui est stationnaire au sens
de clarke. Ce qui permettra de conclure puisque la solution du problème
du suiveur est fortement stable, que l'approximation de la solution du
problème original calculée via l'algorithme est également
fortement stable [11].
3.4 Convergence de l'algorithme du paquet
modifié
Définition 3.4.1. Soit ë0 E
Ëá(xá(y0),
y0)
On dit que l'assertion (NE) est satisfaite si la matrice
~
V2xxL(xá(y0), y0,
ë0) + 2áE VTxgJ0(xá(y0), y0) ~
VxgI0(xá(y0), y0) 0
VygI0(xá(y0), y0)
est de rang maximal : n +
I(xá(y0), y0)
}où J0 = j : ë0 j > 0 et I0
= I(xá(y0), y0) = { j : gj (xá(y0),
y0) = 0 , E est la matrice
identité.
On suppose que les assertions (C), (MFCQ), (CRCQ) et (NE) sont
satisfaites pour le problème (3.12). Alors [11] la différentielle
au sens de Clarke Fá en y0 E Y
est donné par
{VxF(xá(y0),
y0)?yxá(y0) +
VyF(xá(y0), y0)}
?Fá(y0) =
posons Y = 1[8m, et supposons également que
la suite (zs)s généré par
l'algorithme est infini et borné.
Si le seuil d'optimalité å = 0 est choisi, alors
[30] le critère d'arrêt de l'algorithme est
{VxF(xás(zs), zs)d
+ VyF(xás(zs), zs) : d E
?yxás(zs)}
0 E .
i.e dès que zs est stationnaire au sens de
Clarke.
Montrer que l'algorithme converge revient à montrer que la
suite (zs)s converge vers un
point stationnaire au sens de Clarke. C'est-à-dire qu'il
faut montrer que :
{VxF (xá(y), y)d +
VyF(xá(y), y) : d E
?yxá(y)}
0 E .
où (xá(y), y, á) est un
point d'accumulation de la suite
{xás(zs), zs, ás}8s=1 .
On a le résultat suivant :
Approche de résolution par régularisation des
PBN dans le cas de la non unicité. 48
Théorème 3.4.1. Soit
{xás(zs), zs,
ás}00s=1 la suite généré par l'algorithme du
paquet modifié pour å = 0. Supposons que la suite
(ás)s est borné par
á0 > 0, alors tout point d'accumulation
(xá(y), y, á) de cette suite
satisfait
}.
{ ?xF
(xá(y), y)d
+ ?yF (xá(y),
y) : d ? ?yxá(y)
0 ?
preuve :
Rappelons que dans l'algorithme du paquet modifié, la
modification apporté à l'algorithme de Kiwiel consiste à
contrôler le renouvellement de la région de confiance à
chaque itération ; ainsi certains résultats de [30] reste vraies
pour l'algorithme modifié.
Soit y un point d'accumulation de la suite
(zs)s. La solution optimale ds
du problème de minimisation de (3.13) vérifie [30] :
|
ds ? ?Fás (zs; max
{kyj - zjk +
\
jEJs,çsj
0
|
Es - 1 k=1
|
}~kzk+1 - zkk
|
Si l'assertion (SSOC) est satisfaite en
(x0(y), y),
alors
{?xF(x0(y),
y)d +
?yF(x0(y), y) : d
? ?yx0(y) }
0 ?
Où ?Fá(z; å)
est l'å-sous différentielle de Goldstein définie
par
{ }
?Fá(z; å) =
conv ?Fá(y) : kz - yk = å
?Fá(z; å) est
semi-continue supérieurement et localement borné [31].
D'où si (á, y, 0,0) est un
point d'accumulation de la suite
s- 1 00
{ás, zs, ds,
max {yj -- z'k + E kzk+1 _ zkk }
,
jEJs,çs j
k=1 s=1
alors 0 ? ?Fá(y) et
le théorème 3.9 de [30] nous permet de conclure que
{ ?xF
(xá(y), y)d
+ ?yF (xá(y),
y) : d ? ?yxá(y) }
0 ? .
·
Si la suite (ás)s
converge vers zero, alors la condition suffisante d'optimalité
forte (SSOC) aux points d'accumulations de
{xás(zs), zs}00s=1 est
nécessaire pour garantir que l'algorithme du paquet modifié sera
à mesure de calculer toutes les données nécessaire a la
résolution du PBN.
Si cette condition d'optimalité (SSOC) est satisfaite,
le théorème précédent montre que les points
d'accumulations de la suite
{xás(zs),
zs}:1 sont des points stationnaires au sens de
Clarke.
Notons que la suite (zs)s
converge grace à la modification apporté par l'algorithme
du paquet modifié.
Le corollaire suivant découle du théorème
précédent.
Corollaire 3.4.1. Soit
{xás(zs), zs,
ás}00s=1 la suite générée par l'algorithme
du paquet modifié, où {ás}00s=1 converge vers zero. Soit
y = lim zs et x0(y) ?
Ø(y)
s?00
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
Approche de résolution par régularisation des
PBN dans le cas de la non unicité. 49
Mémoire de DEA * Laboratoire
d'analyse numérique * UYI Francisque.D.Fouodji
c~UYI 2007-2008
Ce résultat nous garanti que en résolvant le PBN
(3.1)-(3.2) par régularisation (utilisant l'algorithme du paquet
modifié), on aboutit à une approximation de la solution de la
solution du problème original qui est stationnaire au sens de Clarke
(par consequent fortement stable). Donc plus régulière que les
solutions optimiste et péssimiste respectivement qui sont le plus
souvent instables.
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji
c~UYI 2007-2008
Conclusion et perspectives
Notre travail consistait à présenter l'approche
par régularisation de résolution des PBN dans le cas de la non
unicité de la solution du problème du suiveur, qui fait
actuellement l'objet de nombreuses recherches.
Après avoir présenté les approches
optimiste et pessimiste qui sont les techniques classiques de résolution
des PBN dans le cas de la non unicité, nous avons montré que la
solution du PBN régularisé, même si elle n'est qu'une
approximation de la solution du PBN original, possède de meilleures
propriétés de régularité que les solutions
optimiste et pessimiste. Nous avons pour terminer présenté un
algorithme de résolution basé sur cette approche
développé par S.Dempe, dont nous avons étudié la
convergence théorique.
Mais il se trouve que la convergence théorique d'un
algorithme n'implique pas forcément sa convergence numérique (i.e
après l'implementation de l'algorithme). Nous envisageons dans un
travail futur implementer cet algorithme et étudier sa convergence
numérique. Nous pourrons également voir dans quelle mesure
généraliser les résultats que nous avons
présentés dans les espaces Rn aux espaces de Hilbert,
afin qu'ils puissent être utilisés dans les applications en
ingénierie par exemple.
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji
c~UYI 2007-2008
Bibliographie
[1] I.D.Prete, M.B.Lignola, And J.Morgan. New concept of
well-posedness for optimization problems with variational inéquality
constraints.Journal of Inequalities in Pure and Applied
Mathématics, 2002.
[2] H.V.Stackelberg. Marktform und Gleichgewicht.
Springer-Verlag, Berlin, 1934. Engl transl : The theory of the market
economy, Oxford University press, 1952.
[3] Kornaj,J et Liptak,T. Two-level planning.
Econometrica, 33 :141-169, 1965.
[4] Ross, S.A .The economic theory of agency : the
principal's problem. AER, 63 :134-139, 1973.
[5] Simaan, M et Cruz,J.B. On the stackelberg strategy in
non zero-sum games.Journal of optimization theory and applications, 11 :
533-555, 1973.
[6] Bracken, J et McGill, J. Mathematical programs with
optimization problems in the constraints. Operations reseach, 21 :37-44,
1973.
[7] Candler, W et Norton, R. Multi-level programming
. World Bank developement research center discussion
paper.20.Washington.DC, 1977.
[8] Candler, W et Norton, R. Multi-level programming and
development policy. World Bank developement research center discussion
paper.258. Washington.DC, 1977.
[9] A.Auslander. Regularity theorems in sensivity theory
with nonsmooth data. In J.Guddat, H.Th.Jongen, F.Nozicka, and B.Kummer,
editors, Parametric optimisation and related topics, page 9-15. Akademic
Verlag, Berlin, 1987.
[10] A.B.Zemkoho. Approche multicritère de
résolution des problèmes de programmation à deux niveaux.
Memoire de DEA, Université de Yaoundé I, 2006.
[11] S.Dempe. Foundation of bilevel programming.
Kluwer Academic Publishers, Dor-drecht/Boston/London, 2002.
[12] S.Dempe. A bundle algorithm applied to bilevel
programming problems with non-unique lower level solutions.
[13] C.Audet, J.Haddad, G.Savard. A note on the
definition of the linear bilevel solu-tion.Elsevier Science, 2005.
[14] C.M.Macal and A.P.Hurter. Dependence of bilevel
mathematical programs on irrelevant constraints. Computer and Operations
Research, 24 :1129-1140, 1997.
[15] R.T.Rockafellar. Convex analysis. Princeton
University press, Princeton, 1970.
[16] M.Kojima. Strongly stable stationary solutions in
non linear programs. In S.M.Robinson,editor,Analysis and computation of
fixed points, pages 93-138; Academic press, new york, 1980.
[17]
BIBLIOGRAPHIE 52
Mémoire de DEA *
Laboratoire d'analyse numérique *
UYI Francisque.D.Fouodji c~UYI 2007-2008
W.W.Hager. Lipschitz continuity for constrained
processes. SIAM Journal on control and optimization, 17 : 251-269,
1979.
[18] J.F.Bard, J.Plummer and J.C.Sourie. Determining tax
credit for converting nonfood crops to biofuels : an application of bilevel
programming. In A.Migdalas, P.M.Pardalos and P.Varbrand, editors,
multilevel optimization : Algorithm and applications, Page 23-50. Kluwer
Academic Punlishers, Dordrecht,1998.
[19] P.Loridan and J.Morgan.Approximate solutions for
two-level optimization problems.In K.Hoffman.J.Hiriart-Urruty,C.Lemarchal
and J.Zowe,editor,trends in mathematical opti-mization,volume 84 of
international series of numerical mathematics.Pages 181-196. Bir-khäuser
Verlag,Basel,1988.
[20] P.Loridan and J.Morgan.New results on approximate
solutions in two-level optimization. Optimization.20 : 819-836, 1989.
[21] P.Loridan and J.Morgan. å-regularized
two-level optimization problems : approximation and existence results.In
optimization-fifth French-German conference (Varez), page 99-113. Lecture notes
in mathematics, Springer Verlag, Berlin,No.1405.1989.
[22] P.Loridan and J.Morgan. On strict å-solutions
for two level optimization problem.In proceedings of the international
conference on operations research 90, pages 165-172. Spriger Verlag, Berlin,
1992.
[23] B.Bank, J.Guddat, D.Klatte, B.Kummer, and K.Tammer.
Non-linear parametric optimi-zation.Akademic Verlag, Berlin,1988.
[24] S.Scholtes.Introduction to piecewise differentiable
equations. Technical report, Universität Karlsruhe, Institut für
Statistick und mathematische Wirtschaftstheorie,1994.No.53/1994.
[25] A.N.Tykhonov.Methods for the régularization
of optimal control problems. Soviet Mathematical Doklady,6
:716-763,1965.
[26] D.Klatte and B.Kummer.Strong stability in nonlinear
programming revisited. Journal of the australian Mathematical society, Ser.B,
40 :336-352,1999.
[27] S.Addoune.Optimisation à deux-niveaux :
condition d'optimalité, approximation et stabilité. PhD
thesis. Université de Bourgogne, Département de
Mathématique,1994.
[28] P.Loridan and J.Morgan. Least-norm
régularization for weak two-level optimization problems. In
optimization, optimal control and partial Differential Equations, volume 107 of
International Series of Numerical Mathematics, page 307-318. Birkhäuser
Verlag, Basel, 1992.
[29] V.F.Solohovic. Unstable extremal problem and
geometric properties of Banach Spaces. Soviet Mathematical Doklady. 11
:1470-1472, 1970.
[30] K.C.Kiwiel. Restricted step and Levenberg- Marquard
techniques in proximal bundle method for nonconvex nondifferentiable
optimization. SIAM Journal on Optimization, 6 :227-249, 1996.
[31] K.C.Kiwiel. Method of descent for nondifferentiable
optimization. Springer-verlag, 1985.
| 

