REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET
POPULAIRE
Ministère de l'Enseignement Supérieur et de
laRecherche Scientifique
Université des Sciences et de la Technologie
Houari Boumediene

Faculté d'Electronique et Informatique
Département Instrumentation et
Automatique
Mémoire de Projet de Fin
d'Etudes
D'Ingénieur d'Etat en Electronique
Option : INSTRUMENTATION
THEME
ETUDE DU "SYSTÈME AVERTISSEUR DE PROXIMITE
DU
SOL AMELIORE (EGPWS)" ET SIMULATION DE SES MODES
DE
FONCTIONNEMENT
Proposé par: Présenté
par:
|
Mr. F.OUNNAS (AIR ALGERIE) Encadré
par:
Mme. N.Saadia (USTHB)
Mr. F.OUNNAS (AIR ALGERIE)
|
ZERZOUR Asmaa GHEZALI Lydia
|
Promotion: 2011-2012
????
.
ÉÑÆÇØáÇ ??
Ê?Ùææ ??
ÑÇæÓÓßÅ
ÉÓÇÑÏ á?Î ??
ÖÑ?Ç ?? ÈÑÞáÇÈ
ÑÇÐä?Ç ãÇÙäá
????? ÉÓÇÑÏ ÇÐ ?????
?????
|
Borland Delphi
7ÉÌãÑÈáÇ
??????
|
ãÇÏÎÊÓÇÈ
|
???? È?áÇÓ ?????
æ ?????? ????? ?????? ÁÒÌÈ
ÚæÈÊã
|
Résumé
Notre travail consiste à faire une
étude descriptif du système d'avertissement de proximité
du sol amélioré EGPWS, par l'étude de ses accessoires et
son fonctionnement. Suivi d'une partie pratique concernant la programmation et
simulation de ses modes de fonctionnement sous BORLAND DELPHI
7.
Summary
Our work consists to make a descriptive study of
the Enhanced Proximity Warning System EGPWS, from to studies of theirs
accessories and its functioning. Followed by a practical part concerning
programming and simulation of its operating modes in BORLAND DELPHI
7.
Remerciements
Tous les eloges et les remerciements sont à Allah
l'un, le seul createur et gouverneur de cet univers.
Ce travail a ete encadre par Madame Nadia SAADIA, nous lui
presentons nos plus chaleureux remerciements pour les conseils qu'elle nous a
apportes et la confiance qu'elle nous a temoignee tout au long de cette
periode.
Nous tenons particulièrement à exprimer toute
notre gratitude aux personnes suivantes :
Monsieur Fayçal OUNNAS notre promoteur de stage,
Monsieur
Abderrahmane MEKKID technicien de bord à la base de
maintenance de la compagnie AIRALGERIE ainsi qu'à toute l'equipe de
l'Atelier des Instruments de Bord, pour la disponibilite et l'aide efficace
qu'ils nous ont apportee, qu'ils trouvent ici l'expression sincère du
bon souvenir que nous en garderons .
Nous remercions vivement tous les enseignants du Departement
Instrumentation de la Faculte d'Electronique et Informatique de l'Universite
des Sciences et Techniques HOUARI BOUMEDIENE qui nous ont fournis les
outils necessaires à la reussite de nos etudes
universitaires, se fut un grandplaisir d'apprendre jour après
jour.
Enfin, nos remerciements vont egalement à nos familles
et à nos amis, nous leur dedicaçons ce modeste travail.
A ma chère regrettée grand-mère qu'Allah
l'accueille en son vaste paradis.
A mes parents pour toute l'aide morale et matérielle
qu'ils m'ont apportées, ainsi que mes adorables sceurs : SARAH,
AMINA, AMEL, et HADJER.
A mes nièces et mon neveu.
A mon cherfiancé RABAH.
A mes cousines : GHANIA et
SALIMA.
A toutes mes amies, je citerais en particulier
MEDINA et je tiens à la remercier pour son aide qui
m'était précieuse.
A ma très chère Mère
et à mon cher Père, en témoignage et en
gratitude de leurs dévouement, de leurs soutien permanent durant toutes
mes années d'études, leurs sacrifices illimités, leurs
réconfort moral, eux qui ont consenti tant d'effort pour mon
éducation, mon instruction afin de me voir atteindre ce but, pour tout
cela et pour ce qui ne peut être dit, mes affectations sans
limite.
A ceux qui sont la source de mon inspiration et mon courage,
à qui je dois de l'amour et de la reconnaissance :
A mes Chères Sceurs : KHADIDJA,
AICHA, et IMENE.
A toute ma famille.
A mon voisin RACHID, et je tiens à
le remercier pour son aide qui m'était vraiment précieuse pour la
contribution de ce travail; ainsi que toute sa famille. A tous mes amis, en
particulier le GROUPE du « QG ».
Ot7AW 4,4i,

-01011
All
10.1 1111c,

ono
ga.,418AREI11:8
Ot 6117670 ollgia radforedoe

gllati,eiRE11:8
Amedgiom cfg-upOgol,T
//W
gilaffiRK

modes
lizgumlloodb

Co,


30,
-01
Introduction Générale 1

CHAPITRE I :
Généralité sur la radionavigation
I.1.La radionavigation 2
I.1.1. Le système d'atterrissage aux instruments (ILS)
.2
I.1.2. La radio Altimètre ..4
I.1.3. Système de positionnement mondial (GPS) 5
I.2.Les équipements de sécurité 6

CHAPITRE II : Présentation du
système EGPWS
II.1.Description générale de l'EGPWS .7
II.2. Constitution du système EGPWS .7
II.3. Les interface de l'EGPWS 13
II.3.1.Les interfaces discrètes du système 14
II.3.2. Les interfaces digitales de l'EGPWS 15

CHAPITRE III : Description des
modes de l'EGPWS
III.1. les modes de fonctionnement de l'EGPWS
|
. 19
|
|
|
III.2.Mode 1 : Perte de descente excessive
|
21
|
|
|
III.3.Mode 2 : Taux d'approche excessif
|
24
|
|
|
III.4.Mode 3 : Perte d'altitude après décollage
|
. 24
|
|
|
III.5.Mode 4: Proximité du sol avec les trains
d'atterrissage ou volets entrants
|
..26
|
|
|
III.6.Le mode 5 : Descente au-dessous du Glide Slope
|
. 28
|
|
|
III.7.Mode 6 : Descente au-dessous du minimum
|
29
|
|
|
III.8.Mode 7 : Détection de gradient de vent (WINDSHEAR)
|
... 31
|
|
|
III.9. La fonction Terrain Clearance Floor (TCF)
|
33
|
|
|
III.10. La Fonction Terrain Awarness (TA)
|
|
33
|
|
III.11. Les indications visuelles et auditives de l'EGPWS
|
|
34
|

CHAPITRE IV : Programmation des modes de
l'EGPWS
IV.1. Présentation du logiciel DELPHI 7 ..36
VI.2.Programmation des modes de fonctionnement 36 IV.2.1. Les
organigrammes des modes de l'EGPWS 36
IV.2.2. Présentation des interfaces .49

CHAPITRE V : Recherche de pannes dans
l'EGPWS
Maintenance de l'EGPWS
54
|
V.2. L'auto test de l'EGPWS
|
54
|
V.3. L'état des LED sur le panneau avant de l'EGPWC
|
|
..56
|
|
|
Conclusion Générale
|
.58
|
LISTE DES FIGURES

Présentation de la société d'accueil
AIR ALGERIE
Figure 1: Organigramme de la direction
technique

CHAPITRE I :
Généralité sur la radionavigation
Figure I.1: Le système d'atterrissage aux
instruments (ILS) 2
Figure I.2: Antenne Localizer . 3
Figure I.3: Antenne du Glide Slope . 4
Figure I.4: Radio Altimètre .. 5
Figure I.5: Global Positioning System (GPS) ..
5
Figure I.6: Air Trafic Control (ATC)/Trafic
Alert and Collision Avoidance System (TCAS) 6

CHAPITRE II : Présentation du
système EGPWS
Figure II.1: Schémas synoptique
représentant de l'EGPWS 8
Figure II.2: Enhanced Ground Proximity Warning
Modul (EGPWM) 9
Figure II.3: Emplacement des composants dans la
soute électronique 10
Figure II.4: Enhanced Ground Proximity Warning
Computer (EGPWC) 11
Figure II.5: La face avant de l'EGPWC 11
Figure II.6: les interfaces de l'EGPWS 14
Figure II.7: les interfaces discrètes de
l'EGPWS .. 15
Figure II.8: les interfaces digitales de l'EGPWS
16

CHAPITRE III : Description des modes de
l'EGPWS
Figure III.1: Mode 1 (Pente de descente
excessive) 20
Figure III.2: Principe de fonctionnement du mode
1 21
Figure III.3: sous mode 2A (Taux d'approche
excessif) 22
Figure III.4: Sous mode 2B (Taux d'approche
excessif) . 22
Figure III.5: Principe de fonctionnement du mode
2 24
Figure III.6: Mode 3 (Pertes d'altitude
après décollage) 24
Figure III.7: Principe de fonctionnement du mode
3 25
Figure III.8 : Mode 4 (Proximité du sol
avec les trains d'atterrissage ou avec les Flaps entrants).... 26
Figure III.9 :Principe de fonctionnement du mode
4 27
Figure III.10 :Mode 5 (Descente au dessous du
glide slope) 28
Figure III.11 : Principe de fonctionnement du
mode 5 29
Figure III.12 : Mode 6(Descente au dessous du
minimum) 30
Figure III.13 : Bank Angle 31
Figure III.14 : Mode 7 (Avertir pour les
conditions windshear) . 32
Figure III.15 : Schéma descriptif du
fonctionnement de l'EGPWS en mode 7 32

CHAPITRE IV : Programmation des
modes de l'EGPWS
Figure IV.1: organigramme du mode 1 . 37
Figure IV.2 : Organigramme du mode 2A 39
Figure IV.3 : Organigramme du mode 2B 40
Figure IV.4 : Organigramme du mode 3A 41
Figure IV.5 : Organigramme du mode 3B 42
Figure IV.6 : Organigramme du mode 4A 43
Figure IV.7 : Organigramme du mode 4B 44
Figure IV.8 : Organigramme du mode 5 45
Figure IV.9 : Organigramme du mode 6 47
Figure IV.10 : Organigramme du mode 6 (Bank
Angle) ..48
Figure IV.11 : Organigramme du mode 7 58
Figure IV.12 : Fenêtre du mode 1 49
Figure IV.13 : Fenêtre du mode 2 50
Figure IV.14 : Fenêtre du mode 3 50
Figure IV.15 : Fenêtre du mode 4A 51
Figure IV.16 : Fenêtre du mode 4B 51
Figure IV.17 : Fenêtre du mode 5 52
Figure IV.18 : Fenêtre du mode 6 52
Figure IV.19 : Fenêtre du mode Bank Angle
53
Figure IV.20 : Fenêtre du mode 7 53

CHAPITRE V : Recherche de pannes
dans l'EGPWS
Figure V.1 : Face avant de l'EGPWC 55
LISTE DES TABLEAUX

CHAPITRE III : Description des modes de
l'EGPWS
Tableau III.1 : Les indications visuelles et
auditives de l'EGPWS 34
Tableau III.2 : Priorité des alertes
audio 34

CHAPITRE V : Recherche de
pannes dans l'EGPWS
Tableau V.1 : L'état des LED du panneau
avant d'EGPWC . 57
LISTE DES ABREVIATIONS
A
|
AC
|
Alternating current
|
Courant alternatif
|
|
ADIRS
|
Air Data Inertial Reference System
|
L'unité de référence aérodynamique et
inertielle
|
|
AOA
|
Ongle Of Attack
|
L'angle d'attaque indiqué
|
|
AMM
|
Aircraft Maintenance Manuel
|
|
B
|
BITE
|
Built In Test Equipment
|
L'autotest de l'équipement
|
C
|
CDU
|
Common Display Unit
|
Unité d'affichage commun
|
|
CFIT
|
Controlled Flight Into Terrain
|
Collisions avec le relief sans perte de contrôle
|
|
CMM
|
Component Maintenance Manuel
|
|
D
|
DC
|
Direct Current
|
Courant direct
|
|
DEU
|
Display Electronic Unit
|
L'unité d'affichage éléctronique
|
|
DFCS
|
Digital Flight Control System
|
|
E
|
EGPWS
|
Enhanced Ground Proximity Warning System
|
System amélioré d'avertissement de proximité
sol
|
|
EGPWM
|
Enhanced Ground Proximity Warning Module
|
Module d'avertissement de proximité sol
|
|
EGPWC
|
Enhanced Ground Proximity Warning Computer
|
Calculateur
d'avertissement de proximité sol
|
|
EFIS
|
Electronic Flight Instrument system
|
Le panneau de control
|
F
|
FAA
|
Federal Aviation Administration
|
Autorité en charge de l'aviation
|
|
FDAU
|
Flight Data Acquisition Unit
|
L'unité d'acquisition de donnée de vol
|
|
FDR
|
Flight Data Recorder
|
L'enregistrement des paramètres de vol
|
|
FMC
|
Flight Management Computer System
|
Le système de calculateur de gestion de vol
|
G
|
GND
|
Ground
|
Sol
|
|
GND PROX WARN
|
Ground Proximity Warning
|
Avertissement de proximité sol
|
|
GPS
|
Global Positioning System
|
System de positionnement global
|
|
GPWS
|
Ground Proximity Warning System
|
Système d'avertisseur de proximité sol
|
I
|
IM
|
Inner Marker
|
Radio borne intérieure
|
|
ILS
|
Instrument Landing System
|
Le system d'atterrissage aux instruments
|
L
|
LRU
|
Line Replaceable Unit
|
Unité remplaçable en ligne
|
M
|
MMR
|
Multi Mode Receiver
|
Le récepteur multi mode
|
|
MM
|
Middele MARKER
|
Radio borne intermédiaire
|
|
MCP
|
Mode Control Panel
|
Pannau de contrôle
|
N
|
ND
|
Navigation Display
|
Ecran de navigation
|
O
|
OM
|
Outer MARKER
|
Radio borne extérieure
|
P
|
PFD
|
Primary Flight Display
|
Indicateur de vol primaire
|
|
PSEU
|
Proximity Switch Electronic Unit
|
Le capteur de proximité de l'unité
éléctronique
|
R
|
REU
|
Remote Electronic Unit
|
Unité à distance électronique
|
S
|
SMYD
|
Stall Management Yaw
|
Le calculateur de décrochage
|
|
Damper
|
et d'amortisseur de lacet
|
T
|
TA
|
Terrain Awarnesss
|
La fonction
d'avertissement terrain
|
|
TAWS
|
Terrain Awarness Waring System
|
Système amélioré d'avertissement de
proximité sol
|
|
TCAS
|
Trafic and alerte Collision Avoidance System
|
Le système d'alerte de trafic et d'évitement de
collision
|
|
TERR/WXR
|
Terrain/Weather Radar
|
Le radar terrain/météo
|
U
|
UHF
|
Ultra High Frequency
|
Ultra haute fréquence
|
V
|
VHF
|
Very High Frequency
|
Très haute fréquence
|
|
VSI
|
Vertical Speed Indicator
|
La vitesse verticale inertielle
|
Introduction générale
Les collisions avec le relief sans perte de contrôle
CFIT (Controlled Flight Into Terrain) constituent depuis l'avènement de
l'aviation commerciale dans les années cinquante, la majorité des
cas d'accidents aériens. Ce type d'accident est d'autant plus dramatique
que l'enquête technique montre, qu'avant l'impact, l'avion était
en état de navigabilité, que ses systèmes de bord
fonctionnaient de façon normale mais que l'équipage n'avait pas
conscience de l'imminence de l'accident.
L'ensemble des professionnels de l'aéronautique s'est
donc penché sur ce problème crucial pour la
sécurité du trafic aérien et un certain nombre
d'état ont engagé des études portant sur la
réalisation des différents appareils et instruments fiables et
précis, afin de faciliter la conduite des avions et prévenir ce
type d'accidents.
Parmi ces instruments de bord, on trouve le TAWS (Terrain
Awareness Warning System), plus connu sous le nom GPWS (Ground Proximity
Warning System). Le GPWS est installé à bord des avions,
génère des alarmes avancées, sonores et visuelles dans le
poste de pilotage, pour condition de vol dangereuse proche du sol.
Le GPWS a sept (7) modes basique de fonctionnement,
associés chacun à des niveaux d'alerte qui sont fournis de
façon audio à l'équipage. Pour une fonction donnée
donc selon la priorité de l'alarme ; l'origine de l'information ;
l'état de la fonction c'est-à-dire selon le mode
sélectionné, il apporte à l'équipage les
informations sonores les plus appropriées.
Avec le GPWS, la proximité avec le sol était
bien gérée mais la détection des alertes était
très grossière malgré ses sept niveaux définis avec
des priorités différentes. Ses fonctions ont donc
été couplées avec une fonction d'alerte et d'affichage du
terrain: c'est l'Enhanced GPWS. Il a été également
amélioré en intégrant une corrélation entre la
position de l'avion et la base de données terrain mondial qui est
embarqué dans ce système. Ceci se traduit par la
présentation d'une image de terrain au pilote et d'alerte visuelle et
audio. Ces améliorations permettent d'enrichir l'ensemble des
informations fournies à l'équipage, de façon à lui
assurer la meilleure conscience de son environnement dans les situations
délicates.
Notre travail consiste à étudier et à
simuler les fonctions de l'EGPWS sous DELPHI. Nous avons organisé ce
mémoire en cinq (5) chapitres :
· Dans le premier chapitre nous présentons un petit
aperçu sur la radionavigation ;
· La description du système EGPWS fait l'objet du
second chapitre ;
· Le troisième chapitre est consacré au
fonctionnement de l'EGPWS ;
· La programmation et la simulation des sept (7) modes de
fonctionnement l'EGPWS sont présentés dans le quatrième
chapitre ;
· Nous avons jugé utile de rajouter en
cinquième chapitre la méthodologie de recherche de pannes
à effectuer sur l'EGPWS ;
· Enfin nous terminerons par une conclusion
générale.
I.1.La radionavigation:
La radionavigation est une technique de navigation utilisant
des ondes radioélectriques pour déterminer la position de l'avion
ou un lieu de position. On distingue les systèmes de positionnement
passifs sans émetteurs à bord, et les systèmes actifs avec
transmission entre mobile et base.
Les instruments de la radionavigation utilisent des stations
au sol, ou des satellites (GPS), pour fournir des indications sur la position
de l'avion dans l'espace. Les principaux systèmes de radio navigation
encore utilisés de nos jours sont :
- L'ILS (Instrument Landing System);
- Le GPS (Global Positioning System);
- Le RA (Radio Altimeter).
I.1.1.Le système d'atterrissage aux instruments
(ILS):
L'ILS (Instrument Landing System), système
d'atterrissage aux instruments est une aide d'approche à l'atterrissage
de l'avion. Son rôle est de fournir au pilote les indications en site et
en azimut pour l'amener dans l'axe de la piste et lui donner un angle de
descente (trajectoire idéale de descente). (Fig. I.1). Il comprend :
- Un localizer : fournit l'écart de l'avion par rapport
à l'axe de la piste;
- Un glide path : fournit l'écart de l'avion par rapport
à la pente nominale d'approche ; - Des radiobornes (markers).
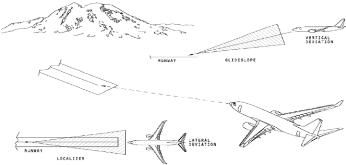
Figure I.1 : Le système d'atterrissage
aux instruments (ILS)
a. Théorie de Localizer : le localizer
est une aide à la navigation à courte distance. Il fournit au
pilote une indication continue d'écarts par rapport à un plan
verticale passant par l'axe de la piste. L'information est donnée
à bord sur un indicateur d'écart. L'aiguille de ce dernier est
centrée lorsque l'avion est dans le plan vertical passant par l'axe de
la piste. Lorsque l'avion est en phase d'approche, le sens de la
déviation de l'aiguille
indique le sens de la manoeuvre à effectuer (gauche ou
droite). Il est constitué par un ensemble d'antennes situées
après le bout de la piste qui émettent une porteuse VHF entre 108
et 112 MHz. (Fig. I.2). [6]

Figure I.2 : Antenne Localizer
Le principe de fonctionnement du Localizer est comme suit: [6]
- Emission: L'ensemble d'antennes envoie une
porteuse VHF modulée en amplitude sur deux fréquences (90HZ et
150HZ).
- Réception: Le récepteur du
localizer reçoit deux signaux de 90HZ et 150HZ et compare le taux de
modulation des deux lobes. Si l'appareil de se trouve à gauche par
rapport à l'axe de la piste, le signal de 90HZ va prédominer et
l'indication de déviation du Localizer se positionnera à droite
pour indiquer que l'axe de la piste d'atterrissage se trouve à droite.
Par contre, si l'avion se trouve à droite de l'axe de la piste, le
signal de 150HZ prédominera, et l'indication de déviation se
positionnera à gauche. Si l'avion est sur l'alignement de piste, les
taux de modulation sont égaux, l'aiguille reste donc à sa
position neutre c'est-à-dire au centre.
b. Théorie du Glide: le Glide est une
aide de navigation à courte distance. Il fournit au pilote une
indication continue d'écart oblique matérialisant le plan de
descente. L'information est présentée à bord sur un
indicateur d'écart centre. Le sens de déviation de l'aiguille
indique le sens de manoeuvre à effectuer (montée ou descente). Il
est constitué par
un ensemble d'antennes, qui émettent une porteuse UHF
entre 328,65 et 335,40 MHz (Fig. I.3).
Figure I.3 : Antenne du Glide Slope.
Le principe de fonctionnement du Glide est comme suit:
- Emission: Le Glide est composé d'un
système de deux antennes directives. Ces antennes rayonnent de
façon différente des porteuses modulées à 90HZ et
150HZ. Le lobe supérieur modulé en amplitude à 90HZ tandis
que le lobe inférieure est modulé à 150HZ.
- Réception: Le récepteur du
glide reçoit les deux signaux 90HZ, 150HZ et compare leur taux de
modulation. Si l'appareil se trouve au-dessus de la trajectoire de descente, le
signal de 90HZ aura une amplitude plus grande que celle de 150HZ et
l'indicateur montrera que la trajectoire de descente est en dessous de l'avion,
l'indicateur du glide sera en dessous de l'avion. Mais si l'appareil est en
dessous de la trajectoire de descente le signal de 150HZ prédominera et
l'indicateur du glide sera au-dessus de l'avion.
c. Les radio-bornes (markers): le système
ILS est complété par trois radio-bornes à rayonnement
vertical, situé sur l'axe d'approche à des distances
caractéristiques :
- Passage à 7200m de hauteur (Outer Marker OM) ;
- Passage à 1050m de hauteur (Middle Marker MM) ;
- Passage à 30m de hauteur (Inner Marker IM).
Ils donnent une information sonore et visuelle d'écart
discontinue de distance par rapport à un seuil de piste.
I.1.2. La radio Altimètre :
La radio Altimètre (Fig. I.4) est un appareil à
bord d'un aéronef destiné à mesurer sa hauteur par rapport
au sol ou la surface de l'eau. En aéronautique c'est un instrument
d'aide au pilotage en particulier en vol sans visibilité, ou vol aux
instruments. Il indique la hauteur de l'aéronef au-dessus du sol. Le
« 0 » correspondant à la position de l'appareil au moment
précis où, lors de l'atterrissage les roues entrent en contact
avec le sol.
Sur la plupart des radioaltimètres, une consigne de
hauteur minimale de vol peut être affichée. lorsque
l'équipement détecte que l'aéronef vol à une
altitude inferieur à celle de la consigne, une alarme sonore et visuelle
est déclenchée dans le poste du pilotage pour prévenir le
pilote. En particulier pendant la phase d'approche et d'atterrissage des
aéronefs, le radioaltimètre aide au suivi de la trajectoire
verticale et à la tenue de la pente de descente.
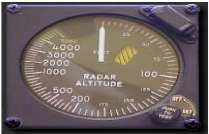
Figure I.4 : Radio Altimètre.
Son principe de fonctionnement est d'envoyer des ondes de
fréquence de 4250HZ à 4350HZ au sol [7]. Une fois
réfléchies, elles seront reçues au niveau de l'avion, le
temps d'aller-retour du signal est une valeur proportionnelle à
l'altitude. Il permet aussi de donner un signal audio, et visuel sur
l'indicateur de l'altitude pour prendre une hauteur de décision
(altitude de décision) inférieur à 2500 pieds.
I.1.3. Système de positionnement mondial (GPS) :
[8]
Aide à la navigation en route à couverture
mondiale basée sur la réception des satellites militaire. L'aide
à l'approche et l'atterrissage est à l'étude pour obtenir
la précision exigée dans ces phases de vol. Les informations
fournies sur un écran sont la position et l'altitude plus la vitesse-sol
et la route vraie.
Son principe de fonctionnement revient à mesurer
l'écart de temps entre l'instant t1 de l'émission d'un signal par
un satellite et l'instant t2 de réception par l'utilisateur de ce
signal. L'écart mesuré correspond au temps de parcours par l'onde
électromagnétique de la distance « d1, 2, 3 » satellite
- utilisateur à la vitesse de la lumière C=300 000 km/s (Fig.
I.5). Ceci dit, avec trois satellites on peut connaitre un positionnement en 2D
(latitude et longitude). Un quatrième satellite permet d'obtenir un
positionnement en 3D (latitude, longitude et altitude). (Fig. I.5)
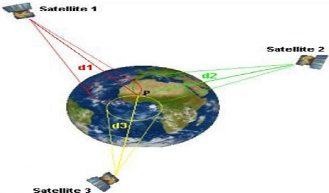
Figure I.5: Global Positioning System (GPS).
I.2.Les équipements de sécurité
:
Les équipements de sécurité disponible sont
:
1. Le système ATC (Air Trafic Control):
le contrôle de trafic aérien (ATC) est un réseau
de tour de contrôle, pour le décollage et l'atterrissage, afin
d'assurer un déroulement efficace et sûr du trafic aérien.
Le centre de contrôle au sol se charge des appareils atterrissant ou
quittant les pistes. La tour de contrôle s'occupe des appareils circulant
aux alentours de l'aéroport, et délivre les autorisations de
décollage ou d'atterrissage (Fig I.6).
2. Le système TCAS (Trafic Alert and Collision
Avoidance System) : le système d'alerte de trafic et
d'évitement de collision (TCAS) est un système dont la fonction
principale est de détecter et d'afficher les avions proches, et de
fournir à l'équipage des indications sonores et visuelles pour
les éviter ; en changeant la trajectoire (Fig. I.6).
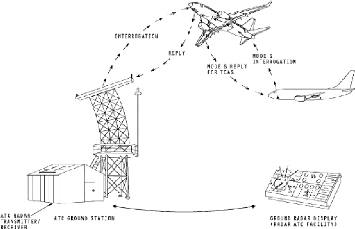
Figure I.6: Air Trafic Control (ATC)/Trafic
Alert and Collision Avoidance System (TCAS)
3. Le système GPWS (Ground Proximity Warning
System): le système avertisseur de proximité de sol GPWS
est un équipement qui déclenche des alarmes auditives et
visuelles lorsque l'avion s'approche du sol. Une version
améliorée (Enhanced GPWS) possède en plus une cartographie
du terrain qui s'affiche en cas de danger.
Dans le cadre de notre travail, nous nous intéressons au
système EGPWS et à ses modes de fonctionnement. Ceci dit nous
présentons dans le chapitre suivant ce système.
II.1.Description générale de l'EGPWS
:
Le système d'avertissement de proximité sol
appelé communément GPWS (Ground Proximity Warning System) est un
système de surveillance, fonctionne avec la radio altimètre,
donne à l'équipage de vol des alarmes avancées, sonores et
visuelles pour condition de vol dangereuse proche du sol. Il fonctionne entre
50 et 2450 pieds. Cependant le GPWS ne détecte que la proximité
du sol à la verticale de l'avion. Un dispositif plus
évolué appelé Enhanced-GPWS ou EGPWS est aujourd'hui
disponible. Ce dispositif inclus en plus des fonctions basiques du GPWS une
base de données géographique qui permet de déterminer
l'état du terrain autour de l'appareil connaissant sa position. Ainsi,
l'EGPWS permet une meilleure prévention des collisions avec le sol
grâce à la connaissance du terrain au-devant de l'avion.
Le EGPWS, ou Enhanced Ground Proximity Warning System
(système avertisseur de proximité du sol amélioré),
est enclenché lors des phases critiques de décollage, de
croisière et d'atterrissage et alerte le pilote en cas de danger, en
produisant des alarmes visuelles et sonores lorsque ses calculs montrent que
l'avion passe au-dessous d'une distance minimale. Il possède sept (7)
modes d'opération :
Mode 1 : Pente de descente excessif
Mode 2 : Taux d'approche excessif
Mode 3 : Perte d'altitude après décollage
Mode 4 : Configuration train et/ou volets inadaptée
à l'atterrissage Mode 5 : Descente au-dessous du glide slope
Mode 6 : Descente au-dessous du minimum
Mode 7 : Avertir aux conditions windshear
En comparant en permanence les informations- fournies par sa
propre base de données du terrain ainsi que par l'altimètre,
radar et la navigation par satellite, le EGPWS surveille constamment la
position de l'avion par rapport au sol et exclut ainsi pratiquement tout risque
de contact avec ce dernier d'une façon dangereuse.
II.2. Constitution du système EGPWS:
L'EGPWS se compose des éléments suivants (Fig.
II.1) :
- Les deux hauts parleurs ;
- Les deux boutons témoins ambres «BELOW G/S»
;
- Le module d'avertissement de proximité sol EGPWM
(Enhanced Ground Proximity Warning Modul) ;
- Le calculateur d'avertissement de proximité sol EGPWC
(Enhanced Ground Proximity Warning Computer);
- Le module commutateur de programme (PIN Program);
- Le relais 745 du radar terrain/météo (TERR/WXR
relays); - Le relais 746 du radar terrain/météo (TERR/WXR
relays).
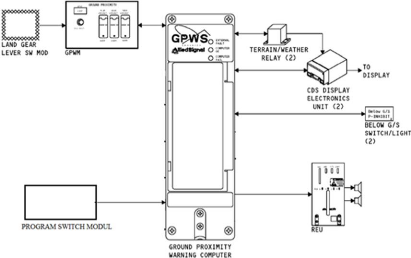
Figure II.1 : Schémas synoptique
représentant de l'EGPWS
Les composants qui constituent l'EGPWS se situent dans des
emplacements différents : le poste de pilotage et la soute
électronique.
1. Description des composants de l'EGPWS situé
dans le poste de pilotage: Les composants de l'EGPWS qui existent dans
le cockpit sont :
- Les deux hauts parleurs : Les hauts
parleurs sont branchés avec l'EGPWC à travers le REU (Remote
Electronic Unit) (Fig. II.1). Ils fournissent des avertissements
générés électroniquement par l'EGPWS.
- Les deux boutons témoins ambres «BELOW
G/S» : Les deux boutons témoins ambres «BELOW
G/S» sont placés sur le tableau de bord comme l'indique la figure
(Fig. II.1). Ils ont deux fonctions :
- Ils s'allument en clignotant pour avertir l'équipage que
l'aéronef est en dessous de la trajectoire du Glide Slope.
- Pour désactiver les alertes du mode 5, il suffit
d'appuyer sur l'un de ces boutons témoins.
- Module d'avertissement de proximité sol EGPWM
: le module d'avertissement de proximité sol EGPWM est
l'interface entre l'équipage et le EGPWS, il se situe en face le
copilote (Fig. II.2).
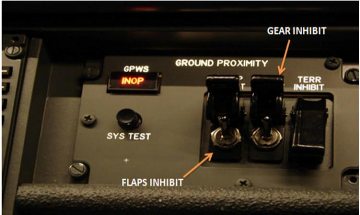
Figure II.2 : Enhanced Ground Proximity Warning
Modul (EGPWM) Il contient les éléments suivants:
a. Une lampe témoin ambre (GPWS INOP) :
elle s'allume dans les cas suivants :
- Le mauvais fonctionnement de l'EGPWS ;
- Le manque de l'une des entrées critiques de l'EGPWC
(input);
- Si l'EGPWC ne peut pas calculer les conditions Windshear
(effet de cisaillement du vent);
- Pendant un autotest de l'EGPWC.
b. Bouton poussoir test (SYS TEST) : le bouton
de test permet de faire un autotest de l'EGPWC au niveau du poste de
pilotage.
c. Un interrupteur d'inhibition volets (FLAPS
INHIBIT) : Lorsqu'on veut faire une approche terrain ou un
atterrissage avec des volets partiels, à ce moment on met l'interrupteur
sur la position INHIBIT afin d'éliminer l'alarme sonore du mode 4.
d. Un interrupteur d'inhibition trains (GEAR INHIBIT)
: Lorsqu'on veut faire une approche terrain avec trains entrants, on
met l'interrupteur sur la position INHIBIT afin d'éliminer l'alarme
sonore du mode 4.
e. Un interrupteur d'inhibition terrain (TERR INHIBIT)
: Quand on met l'interrupteur sur la position INHIBIT la fonction de
rafraichissement d'affichage de l'image terrain TCF (Terrain Clearence Floor),
et la fonction d'avertissement terrain TA (Terrain Awarness) sur les
écrans de navigation NDs (Navigation Display) sont inhibées ainsi
que les alarmes sonores et visuelles du TCF et TA sont
éliminées.
2. Description des composants de l'EGPWS situés dans
la soute électronique :
Ils sont placés sur le compartiment E1 de la soute
électronique. (Fig. II.4)
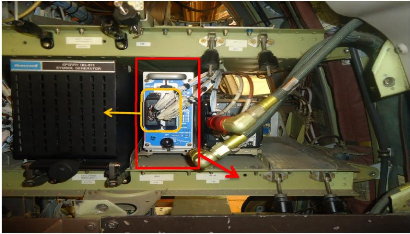
PIN
PROGRAM
EGPWC
Figure II.3 : Emplacement des composants dans la
soute électronique. Les composants situés dans la soute
électronique sont :
- l'EGPWC (Enhanced Ground Proximity Warning Computer)
: le calculateur d'avertissement de proximité sol EGPWC
(Enhanced Ground Proximity Warning Computer), compare le profil de l'avion, la
position des volets, des trains et la marge de sécurité par
rapport au sol, pour déterminer s'il y a une alerte ou condition
d'avertissement de collision avec le sol. L'EGPWC est un LRU (Line Remplaceable
Unit), avec 2.4 pouces de largeur (6.10Cm), 7.9 pouces de hauteur (20.07Cm), et
de 14.3 pouces de longueur (36.32Cm). Il pèse 7 pounds (3.18Kg). Il est
alimenté sous une tension alternative de 115V AC, ayant une
fréquence de 400Hz. [2] (Fig. II.4)

Figure II.5 : Enhanced Ground Proximity Warning
Computer (EGPWC) La figure suivante montre la face avant de l'EGPWC

Indicateurs du statut du système
Fente de carte mémoire
Indicateurs du chargements/déchargement
Connecteur RS-232
Poigné
Bouton poussoir self test
Prise d'écouteur
La porte
Figure II.5 : La face avant de l'EGPWC
La face avant de l'EGPWC comprend trois (3) leds et une porte
(Fig. II.5) :
- LED EXTERNAL FAULT (défaut externe): elle s'allume ambre
en cas de panne extérieur à l'EGPWC ;
- LED COMPUTER OK (ordinateur ok): elle s'allume verte et reste
allumée tant que l'EGPWC est alimenté et fonctionne normalement
;
- LED COMPUTER FAIL (échec d'ordinateur) : elle s'allume
rouge et reste allumée en cas de panne in terne du calculateur.
La porte de la face avant donne l'accès aux fonctions
suivantes (Fig. II.5) :
- SELF TEST SWITCH (bouton poussoir) : pour démarrer le
test de l'EGPWS;
- HEADPHONE JACK (prise d'écouteur) : où se
branchent les écouteurs pour
entendre toutes les alarmes qui sont dans la mémoire de
l'EGPWC ;
- MEMORY CARD SLOT (fente de carte mémoire) : pour
introduire la carte
PCMCIA pour charger ou décharger les données du
terrain;
- UPLOAD/DOWNLOAD STATUS INDICATOR : quatre (4) leds
qui
indiquent le déroulement des opérations de chargement ou
déchargement ;
- RS-232 CONNECTOR (connecteur RS-232) : utilisé dans
l'atelier, pour le chargement /déchargement des données à
l'aide d'un ordinateur ainsi que durant la maintenance de l'EGPWC ;
- Le PIN Program: est des micros Switch
câblés et positionnés de telles sortes à donner un
mot binaire indiquant à l'EGPWC les informations suivantes:
- Le type d'avion ;
- Les annonces du mode 6 (§II.2) ;
- Le volume
d'écoute haut ou bas.
- Weather Relay (relais de météo):
L'ordinateur d'avertissement de proximité de sol EGPWC
(Enhanced Ground Proximity Warning Computer) et
l'émetteurrécepteur radar météo WXR (Weather Radar)
envoient les données d'affichage sur le ND (Navigation Display). Il y a
deux relais TERR/WXR, qui sélectionnent la donnée à
afficher sur chaque ND. Les données WXR et EGPWC sont transmises sous
forme ARINC 429. [Annexe A] les deux relais sont alimentés par une
source de 28VDC.
a. Commande de relais: En appuyant sur le
bouton WXR qui se trouve sur la boite de commande EFIS [Annexe B], nous aurons
les indications RADAR (météo). En appuyant sur le bouton TERR, le
mode TERR est sélectionné et nous aurons les indications de
terrain sur le DEU (Display Electronic Unit).
b. Moniteur de relais: Les relais permettent
de choisir les données WXR/TERR et envoient un signal à l'EGPWC,
l'EGPWC emploi ces entrées pour identifier la position des relais. Quand
les relais sont en position
normale, le moniteur de l'EGPWC n'a aucune tension (0 V).
Quand les relais sont en position terrain, le moniteur de l'EGPWC donne une
tension de 28VDC.
II.3. Les interface de l'EGPWS:
Le système d'avertissement de proximité sol
EGPWS (Fig. II.6) comprend un calculateur d'avertissement de proximité
sol EGPWC, un module d'avertissement de proximité sol EGPWM, les deux
relais et d'autres composants. L'EGPWC est considéré comme le
composant principal de l'EGPWS, il est programmé pour échanger
des données avec autres éléments constitutifs du
système :
- Les relais du radar terrain/météo ;
- L'interrupteur d'inhibition trains (Gear Inhibit Switch) de
l'EGPWM ;
- L'interrupteur d'inhibition volets (Flap Inhibit Switch) de
l'EGPWM ;
- L'interrupteur d'inhibition terrain (Terrain Inhibit Switch) de
l'EGPWM ; - Le bouton poussoir test de l'EGPWM ;
- Les deux boutons témoins «BELLOW G/S» ;
- La lampe INOP de l'EGPWM.
Et avec ces divers systèmes de l'avion qui servent comme
interface avec l'EGPWS : - Le module de commutateur de programme PIN
Program.
- L'unité de référence inertielle et
pneumatique ADIRU (Air Data Inertiel Reference Unit).
- La radio altimètre (Radio Altimeter).
- Le récepteur multi mode MMR (Multi Mode Receiver).
- Le calculateur de gestion de vol FMCS (Flight Management
Computer). - Le mode control panel MCP du DFCS (Digital Flight Control
System).
- Le calculateur de décrochage et d'amortisseur de lacet
SMYD (Stall Management Yaw Damper).
- Le radar terrain/météo TERR/WXR (Terrain/Weather
radar system).
- L'unité d'affichage électronique DEU (Display
Electronic Unit).
- L'unité d'acquisition de donnée de vol FDAU
(Flight Data Acquisition Unit).
- Le système d'alerte de trafic et d'évitement de
collision TCAS (Trafic And Alerte Collision Avoidance System).
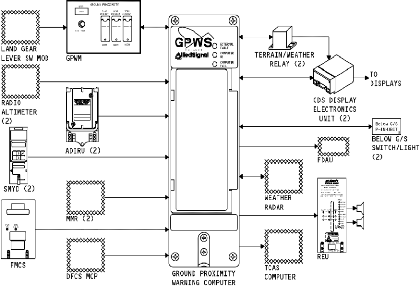
Figure II.6 : les interfaces de l'EGPWS
Le constructeur a différencié les interfaces de
l'EGPWS selon le degré de l'importance de l'information à traiter
en deux: les interfaces discrètes et les interfaces digitales.
II.3.1.Les interfaces discrètes du système
:
La figure suivante illustre les interfaces discrètes :
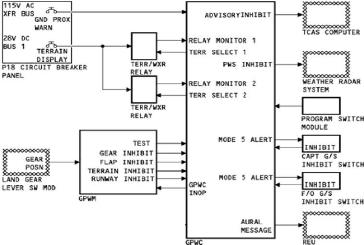
Figure II.7: les interfaces discrètes de
l'EGPWS
Les entrées discrètes sont :
- Les relais du radar terrain/météo ;
- L'interrupteur d'inhibition trains de l'EGPWM ; -
L'interrupteur d'inhibitions volets de l'EGPWM ; - L'interrupteur d'inhibition
terrain de l'EGPWM ; - Le bouton poussoir test de l'EGPWM ;
- Les deux boutons témoins «BELLOW G/S» ;
- La lampe INOP de l'EGPWM ;
- Le module de commutateur de programme PIN Program.
Les sorties discrètes sont :
- La lampe INOP de l'EGPWM ;
- Le système d'alerte de trafic et d'évitement de
collision TCAS ; - Le radar Terrain/Météo ;
- Les deux boutons témoin «BELLOW G/S» ;
- Le REU (Remote Electronic Unit).
II.3.2. Les interfaces digitales de l'EGPWS :
L'EGPWS sert comme interface avec les autres systèmes
de l'aéronef à l'aide du bus de données ARINC 429
(Aeronautical Radio Incorporation type 429) [Annexe A]. Ces systèmes ont
des interfaces digitales avec l'EGPWC (Fig. II.18)
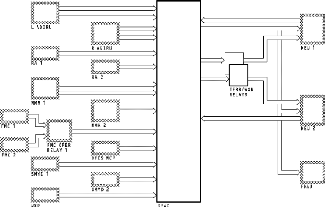
Figure II.9: les interfaces digitales de
l'EGPWS
Les entrées digitales de l'EGPWS sont :
a. L'ADIRU (Air Data Inertial Reference Unit):
l'unité de référence des données
inertielles en vol a deux fonctions primaires :
v' Référence de données aériennes
(ADR).
v' Référence de données inertielles (IR).
L'ADIRU gauche et droite envoie ces données à
l'EGPWC par le bus IR :
- La latitude et longitude; - L'altitude à inertielle ;
- La vitesse verticale à inertielle ;
- L'angle magnétique vrai ;
- Le cap magnétique et cap vrai ;
- L'attitude de lacet et l'attitude de roulis ;
- L'accélération verticale à inertielle ;
- Le taux de lancement.
L'ADIRU gauche et droite envoie ces données à
l'EGPWC par le bus ADR : - La vitesse anémométrique
calculée ;
- La vitesse anémométrique vraie ;
- Le taux d'altitude ;
- L'altitude non corrigée.
b. SMYD (Stall Management Yaw Damper): le
SMYD calcule et envoie les commandes de gestion de décrochage et
l'amortisseur de lacet. Le SMYD envoie les données suivantes à
l'EGPWC :
- L'angle d'attaque indiqué AOA ;
- L'AOA corrigé ;
- La position des volets ;
- La vitesse minimum de sustentation.
c. FMC (Flight Management Computer):
l'ordinateur de gestion du vol (FMC) exécute diverses fonctions
pour aider l'équipage dans la gestion du vol. Ses fonctions sont toutes
construites dans un plan latéral et dans un plan vertical, le pilote
choisit ce plan de vol à partir d'une base de données
stockée dans le système et peut le modifier à tout
moment.
Dans le plan latéral, le FMC exécute:
- Le calcul de la navigation (la position de l'aéronef)
;
- Le choix de l'aide à la radio navigation (automatique ou
par le pilote) ;
- Le guidage latéral pour maintenir l'avion le long du
vol, du décollage à l'approche.
Dans le plan vertical, il calcule :
- La vitesse optimale pour chaque point.
d. MMR (Multi Mode Receiver) : le MMR
(récepteur à plusieurs mode de fonctionnement) contient l'ILS
(Instrument Landing System) (§I.2.1), et le GPS (Global Positioning
System).
e. Weather radar : le système du radar
météo (WXR) fournit les indications visuelles et auditives
suivantes:
- Condition atmosphérique ;
- Effet de cisaillement de vent (Windshear) ;
- Les reliefs.
Le radar météo envoie des données de
prévision de windshear à l'EGPWC.
f. Radio altimètre: le système
radio altimètre donne la distance vraie entre le sol et l'avion, il
fournit la lecture de l'altitude par le DEU (Display Electronic Unit).
L'altitude maximale que peut mesurer ce dispositif est de 2500 pieds, il est
utilisé principalement durant le décollage et l'atterrissage de
l'avion.
g. MCP (Mode Control Panel) du système de
commande de vol : Il envoie la donnée du cap
sélectionné à l'EGPWC. Cette donnée est
utilisée dans le mode 5 et la fonction de modulation de l'enveloppe TA
(Terrain Awarness).
Les sorties digitales de l'EGPWS sont :
a. Les DEUs (Display Electronic Unit):
l'EGPWC envoie le statut du système, les données
d'alarme et d'alerte à l'aide du bus ARINC 429 (annexe) aux DEUs pour
les afficher sur les PFDs (Primary Flight Display) et NDs (Navigation
Display).
b. Le FDAU (Flight Data Acquisition Unit):
l'EGPWC envoie les alertes, les alarmes et les statuts discrets au
FDAU. Celui-ci les envoie à l'enregistreur des paramètres de vol
FDR (Flight Data Recorder).
c. Les relais radar terrain/météo :
l'EGPWC envoie les données d'affichage du terrain aux DEUs
(Dsiplay Electronic Unit) passant par les relais du radar
terrain/météo.
Afin de programmer les modes de fonctionnement de l'EGPWS, nous
présentons dans le chapitre suivant une description de ces modes.
III.1. Les modes de fonctionnements de l'EGPWS :
L'EGPWS est un système qui fournit à
l'équipage des indications sonores et visuelles lorsque les conditions
du vol peuvent impliquer un risque de collision avec le sol. Le système
surveille automatiquement et en permanence la trajectoire de vol de l'avion par
rapport au terrain à toutes les altitudes comprises entre 10 et 2450
pieds. Il utilise les sorties des systèmes fournissant la radio
altitude, vitesse de l'air, le Mach, la position des trains d'atterrissage, la
position des volets, et la hauteur de décision DH. Les diverses
conditions dangereuses qui peuvent être rencontrées en vol sont
divisés en sept modes [1]. Ce sont :
- Mode 1 : Pente de descente excessive;
- Mode 2 : Taux d'approche excessif ;
- Mode 3 : Perte d'altitude après décollage ;
- Mode 4 : Proximité du sol avec les trains d'atterrissage
entrants ou les volets entrants; - Mode 5 : Descente au-dessous du glide
slope;
- Mode 6 : Descente au-dessous du minimum;
- Mode7 : Avertir pour condition windshear.
Et de deux fonctions importantes qui sont :
- Le TCF (Terrain Clearence Floor); - Le TA (Terrain
Awarness).
III.2.Mode 1 : Perte de descente excessive:
Le mode 1 fournit au pilote des alertes et des avertissements
pour de grands taux de descente quand l'avion est près du terrain. Ce
mode dépend de l'altitude et du taux barométrique, et il est
indépendant de la configuration de l'avion dépasse 10 pieds. Si
l'avion entre dans la première zone d'avertissement indiquant une perte
d'altitude excessive, le message << Sink Rate >> sera entendu et
l'indication <<Pull Up>> s'allumera. Si le taux de descente n'est
pas rectifié, l'avion entrera dans la deuxième zone d'alerte, et
le message <<Sink Rate >> sera changé par l'avertissement
<< Whoop Whoop, Pull Up >> et l'indication
<<Pull Up >> étant toujours allumée
(Fig. III.1).
Dans ce cas, la situation devient plus dangereuse et le pilote
doit impérativement corriger la trajectoire. A une altitude
inférieure à 10 pieds, toutes les alarmes du mode 1 sont
invalides.
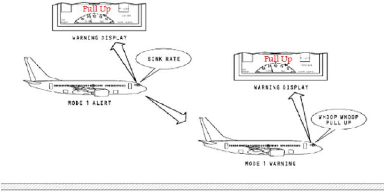
Figure III.1 : Mode 1 (Pente de descente
excessive).
Les alarmes du mode 1 seront entendues pour une radio altitude
de 10 jusqu'à 2450 pieds. Le types d'alarme dépens du taux de
descente et de la radio altitude. La première alarme est une alerte. Si
le taux de descente ne change pas, le pilote aura un avertissement. Les LRU
(Line Replaveable Unit) fournissent les entrées du mode 1 par:
- Les émetteurs et récepteurs de radio
altimètre ;
- L'ADIRU (Air Data Inertial Référence Unit)
Le système EGPWS emploie les données reçues
par les LRU pour détecter les alertes et les avertissements du mode 1.
Ces données sont (Fig. III.2) :
- La radio altitude (RA) ;
- La vitesse verticale inertielle (IVS) ;
- Le taux barométrique d'altitude.
Le détecteur de mode EGPWC calcule le taux de descente
en utilisant la vitesse verticale inertielle. Si elle n'est pas disponible, le
détecteur de mode fait appel au taux d'altitude intérieurement
calculé. Si les deux données ne sont pas valides, le taux
d'altitude barométrique de l'ADIRU est utilisé.
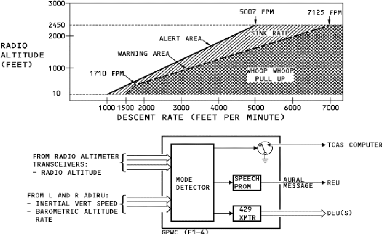
Figure III.2 : Principe de fonctionnement du
mode 1.
III.3.Mode 2 : Taux d'approche excessif.
Le mode 2 fournit des alertes et des avertissements quand le
taux d'approche au terrain est très grand. Il a deux sous modes, le sous
mode 2A et le sous mode 2B. Ce mode dépend du mach, le l'altitude, du
taux barométrique et de la configuration de l'avion (position des flaps
et des trains d'atterrissage).
1. Le sous mode 2A : Le sous mode 2A se
produit pour un grand taux d'approche si les Flaps (volets) sont moins de 25
unités (pas dans la configuration d'atterrissage c'est-à-dire
inférieur a 30 unités). Ce sous mode peut avoir un état
d'alerte ou un état d'avertissement. Pour un état d'alerte,
l'EGPWS donne le message auditif << Terrain Terrain » et le DEU
affiche << Pull Up ». Si il y'a une augmentation de taux d'approche,
le EGPWS donne un avertissement et le message <<Whoop Whoop Pull Up
» sera changé par le message <<Terrain ». (Fig.
III.3)
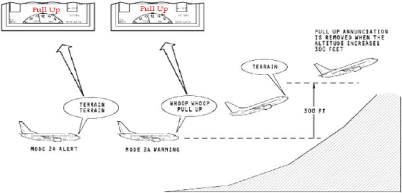
Figure III.3 : sous mode 2A (Taux d'approche
excessif).
2. Le sous mode 2B : Le sous mode 2B donne
des alertes pour un grand taux d'approche si les Flaps sont dans la
configuration d'atterrissage (plus de 30 unités). Ce sous mode peut
aussi donner des alertes et des avertissements si les Flaps (volets) sont dans
la configuration d'atterrissage et l'angle du Glide Slope et la
déviation du Localizer est moins de deux points (dots) pendant une
approche ILS. (Fig. III.4). Le sous mode 2B peut avoir un état d'alerte
ou un état d'avertissement. L'EGPWS donne une alerte sous forme de
message auditif <<Terrain Terrain>> pour un grand taux d'approche,
si les trains d'atterrissage et les Flaps sont dans la configuration
d'atterrissage ou quand les trains d'atterrissage ou bien les Flaps ne sont pas
dans la configuration d'atterrissage. Si l'alerte continue, l'EGPWS donne le
message auditif << Whoop Whoop Pull Up >>.
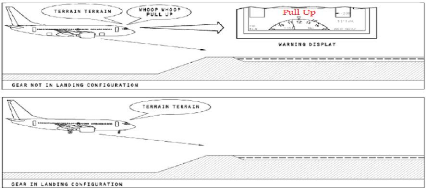
Figure III.4 : Sous mode 2B (Taux d'approche
excessif).
Les alertes du sous mode 2A se produisent entre 30 et 1650
pieds de radio altitude, pour des vitesses anémométrique moins de
220 noeuds. La limite supérieure est de 2450 pieds de radio altitude
pour des vitesses anémométriques entre 220 et 310 noeuds. Et les
alertes du sous mode 2B se produisent entre 30 et 789 pieds de radio altitude.
La limite inférieure change entre 30 et 600 pieds de radio altitude.
L'EGPWS emploie le taux de descente et la position des Flaps (volets) pour
calculer la limite inférieure. (Fig. III.5).
Les LRUs (Line Remplaçable Unit) assurent les
différentes entrées pour l'opération du mode 2 en
utilisant :
- Les émetteurs et récepteurs de la radio
altitude;
- L'ADIRU gauche;
- Le module d'EGPWS ;
- L'amortisseur de lacet de gestion de décrochage (SMYD) ;
- Les MMRs1 et 2.
Ces différents équipements assurent les
différentes données utilisées par l'EGPWS pour
détecter les alertes et les avertissements du mode 2. (Fig. III.5).
Ces différentes données sont :
- La radio altitude;
- La vitesse verticale inertielle (IVS) ;
- Le taux barométrique calculé ;
- La position des volets et des trains d'atterrissage ;
- Le Glide Slope et le Localizer.
Quand il y'a un avertissement (danger) au vol, le
détecteur de mode envoie un signal discret au EGPWS pour donner les
messages auditifs avancés. Les messages auditifs vont à la REU
(Remote Electronique Unit) qui les envoie aux haut-parleurs du poste de
pilotage.
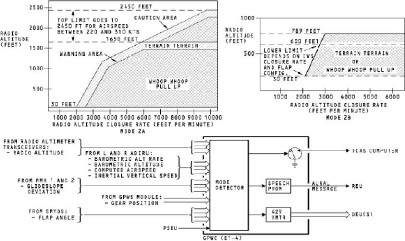
Figure III.5 : Principe de fonctionnement du
mode 2. III.4.Mode 3 : Perte d'altitude après
décollage.
Les alarmes du mode 3 se déclenchent lorsqu'il ya une
grande perte d'altitude après décollage.
Lorsque l'avion atteint 1500 pieds de radio altitude, le mode 3
devient non fonctionnel. Il a deux sous modes, le sous mode 3A et le sous mode
3B. (Fig. III.6).
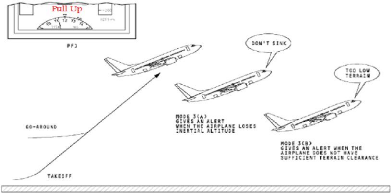
Figure III.6 : Mode 3 (Pertes d'altitude
après décollage).
1. Le sous mode 3A : le sous mode 3A donne
des alertes quand l'avion perd l'altitude après décollage. La
perte dépend du taux d'élévation et de l'altitude de
l'avion. Le message auditif qui sera entendu est <<Don't Sink ».
2. Le sous mode 3B : le sous mode 3B donne
des alertes pour un dégagement minimum de terrain. Le dégagement
de terrain augmente lorsque l'altitude de l'avion est élevée
pendant le décollage. Ce mode donne le message auditif << Too Low
Terrain ».
Le mode 3 fonctionne quand l'une de ces conditions est vraie :
- L'avion s'élève après être
allé en dessous de 245 pieds quand l'avion est dans sa configuration
d'atterrissage (c'est-à-dire les trains d'atterrissage sortants et les
volets plus grand que 30 unités);
- L'avion décolle. (Fig. III.7).
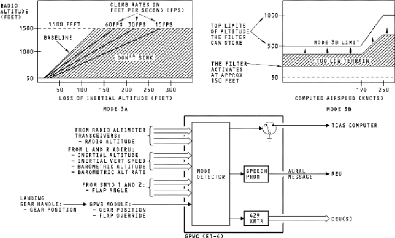
Figure III.7 : Principe de fonctionnement du
mode 3.
Les alertes du mode 3A se produisent entre 30 et 1500 pieds et
changent selon le taux d'altitude de l'avion, et les alertes du mode 3B se
produisent lorsque l'altitude de l'avion est inférieur a celle
calculé par l'EGPWS.
III.5. Mode 4 : Proximité du sol avec les trains
d'atterrissage ou Flaps (volets) entrants.
Le mode 4 fournit des alertes quand l'avion est trop
prés du terrain, et les trains d'atterrissage ou les volets ne sont pas
dans l'état de configuration d'atterrissage. Il a deux sous modes, le
sous mode 4A et le sous mode 4B. (Fig. III.8).
1. Le sous mode 4A : l'EGPWS donne une
alerte pour le sous mode 4A quand les trains d'atterrissage ne sont pas
sortants. Le sous mode 4A donne un message auditif << Too Low
Gear>> lorsque la vitesse anémométrique est basse, ou
<< Too Low Terrain >> lorsque la vitesse
anémométrique est élevée.
2. Le sous mode 4B : l'EGPWS donne une
alerte pour le sous mode 4B quand les trains d'atterrissage sont sortants et
les Flaps ne sont pas dans la configuration d'atterrissage. Le sous mode 4B
donne un message auditif << Too Low Flaps >> lorsque la vitesse
anémométrique est basse, ou << Too Low Terrain>>
lorsque la vitesse anémométrique est élevée.
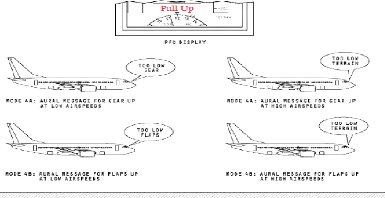
Figure III.8 : Mode 4 (Proximité du sol
avec les trains d'atterrissage ou avec les entrants).
Les alertes du mode 4 se produisent entre 30 et 1000 pied. Les
limites d'altitude pour le sous 4A et le sous mode 4B sont basses lorsque la
vitesse anémométrique est basse. L'alerte du sous mode 4A se
produit si les trains d'atterrissage ne sont pas sortants au-dessous de
l'altitude limite. La limite d'altitude du sous mode 4A est de 500 pieds quand
la vitesse anémométrique est en dessous de 190 noeuds, et de 1000
pieds quand la vitesse anémométrique est élevée. Le
message auditif << Too Low Gear >> du sous mode 4A est
changé par le message auditif << Too Low Terrain >> lorsque
la vitesse anémométrique [Annexe C] est au-dessous de 190 noeuds.
L'alerte du sous mode 4B se produit si les trains d'atterrissage sont
sortants et les volets ne sont pas dans la configuration
d'atterrissage au-dessous de la limite d'altitude. La limite d'altitude du sous
mode 4B est de 245 pieds quand la vitesse anémométrique est
au-dessous de 159 noeuds et elle est de 1000 pieds lorsque la vitesse
anémométrique est élevée.
Le message auditif << Too Low Flaps >> du sous
mode 4B est changé par le message auditif << Too Low
Terrain>> lorsque la vitesse anémométrique est au-dessous
de 159 noeuds. (Fig III.9).
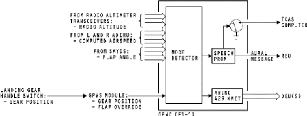

Figure III.9 :Principe de fonctionnement du mode
4. Les LRU assurent ces entrées pour le mode 4 en utilisant :
- L'émetteur et le récepteur de la radio
altimétre ;
- L'ADIRU gauche et air data bus;
- L'amortisseur de lacet et de gestion de décrochage
(SMYD) ; - Le switch manuel du train d'atterrissage ;
- Le module du EGPWS.
L'EGPWS emploie ces données pour détecter les
alertes du mode 4 (fig. III.9). Ces données sont :
- La radio altitude;
- La vitesse anémométrique calculée ;
- La position des Flaps et des trains d'atterrissage.
Quand il y a un avertissement, le détecteur de mode
envoie un signal discret au EGPWS pour donner les messages auditifs
avancés. Les messages auditifs vont être envoyés à
l'REU (Remote Electronic Unit) qui les envoiera aux haut-parleurs du poste de
pilotage.
III.6.Le mode 5 : Descente au-dessous du Glide
Slope.
L'EGPWS donne une alerte pour le mode 5 quand l'avion engage son
atterrissage au-dessous de l'axe du glide slope pendant l'approche si les
trains d'atterrissage sont sortants.
Pour les alertes du mode 5, l'EGPWS donne un message auditif
<<Glide Slope >>. le niveau de volume du message auditif augmente
et se répète plus rapidement pendant que le terrain s'approche de
plus en plus. (Fig. III.10).
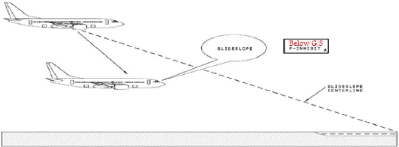
Figure III.10 :Mode 5 (Descente au dessous du
glide slope)
Les alertes du mode 5 peuvent se produire entre 30 et 1000
pieds de radio altitude, il est actif quand l'approche de l'avion est
en-dessous du plan du Glide. Une alarme sonore <<Glide slope retentit
tandis qu'une inscription BELOW G/S spécifique s'allume. La
fréquence de répétition du message <<Glide
slope>> est d'autant plus élevée que l'avion est en-dessous
du plan et proche du sol. (Figure III.11).
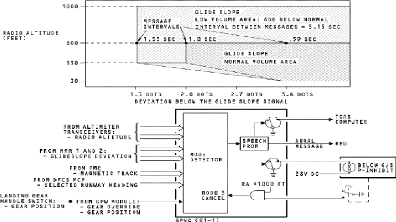
Figure III.11 : Principe de fonctionnement du
mode 5.
Les entrées de LRU (Line Remplaceable Unit) pour
l'opération du mode 5 sont :
- Les émetteurs et récepteurs de la radio
altimétre ; - La boite de commande de mode DFCS ;
- Le commutateur de garde de train d'atterrissage ; - Les MMRs
;
- Les FMCs ;
- Le module d'EGPWS ;
L'EGPWS emploie ces données pour calculer les alertes du
mode 5 : - La déviation de pente du Localizer et du Glide Slope.
- La position des trains.
- Le cap magnétique.
- La radio altimétre.
Quand il ya une alerte du mode 5 le détecteur de mode
envoie un signal discret au EGPWS pour faire apparaitre les messages auditifs
avancés. Les messages auditifs vont aux REU (Remote Electronics Unit)
qui les envoie aux haut-parleurs du poste de pilotage.
III.7. Mode 6 : Descente au dessous du minimum:
Le mode 6 fournit de faibles messages auditifs, quand l'avion
descend par des altitude d'ensemble avec des trains d'atterrissage sortants
(Fig III.12). Les cas disponibles pour l'activation du mode 6 sont :
- Une faible altitude;
- Un minimum d'altitude ;
- Un faible minimum d'approche ;
- Un faible angle de roulis (Bank Angle).
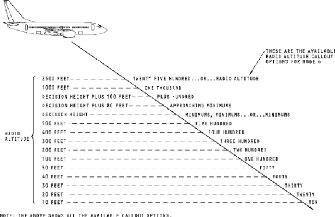
Figure III.12 : Mode 6(Descente au dessous du
minimum).
Le début de faibles altitudes est à 2500 pieds,
il ya une option pour donner le message auditif <<Twenty Five
Hundred>> par radio altitude. Les rappels <<Altitude
Minimum>> s'exécutent en fonction de l'altitude ou hauteur de
décision (DH) calibrée et réglée sur la boite de
commande EFIS. Dans ce cas l'EGPWS génère les rappels audio
suivants :
- Minimum;
- Minimum, Minimum;
- Decision Height (hauteur de décision).
Les rappels << Approching Minimum>> ou <<
Approching Decision Height>> s'éxecutent lorsque l'aéronef
s'approche de la hauteur de decision programmée sur le panneau d'EFIS.
Les faibles angles d'attaque du mode 6 se produisent quand l'angle d'attaque de
l'avion est à plus de 10 degrés et l'altitude est entre 30 et 130
pieds. Au dessous de 130 pieds l'angle d'attaque se produit entre
35degrés et 45 degrés, le message auditif donné est
<<Bank Angle, Bank Angle >> (Fig. III.13).
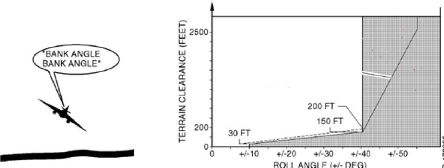
Figure III.13 : Bank Angle
L'EGPWC reçoit les entrées par les unités
suivantes :
- La Radio Altimètre ;
- Le module d'EGPWS ;
- L'ADIRU gauche et droite ; - Les DEU 1 & 2 ;
- Le Pin program.
L'EGPWC emploie ces données pour calculer les alertes du
mode 6 : - La Radio Altitude;
- La position des trains d'atterrissages ;
- L'angle de roulis (AOA) ;
- Le calibre de décision;
- Le Pin program sélectionné.
III.8.Mode 7 : Détection de gradient de vent
(WINDSHEAR) :
Ce mode apparait lorsque les conditions Windshear
(cisaillement du vent) sont présentes pendant le décollage ou
l'approche et à une altitude inférieure à 1500 pieds.
Lorsque l'avion entame son approche et entre dans le Microburst [Annexe C], il
va perdre la vitesse et la portance, par conséquent il perd l'altitude
et la détection Windshear déclenche par une alarme «
Windshear Windshear » avec le message « Windshear » en rouge sur
le PFD (Primary Fly Display) (Fig. III.14).
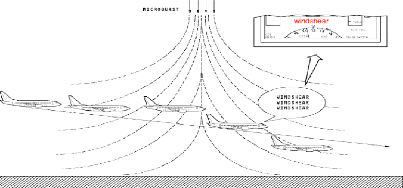
Figure III.14 : Mode 7 (Avertir pour les
conditions windshear)
L'EGPWC reçoit les données les unités
remplaçables en ligne LRUs suivantes. (Fig. III.15) : - Les
émetteurs récepteurs de la radio altimètre droits et
gauches ;
- Les deux ADIRU (Air Data Inertial Refèrence Unit) droit
et gauche;
- Le calculateur de décrochage et d'amortisseur de lacet
(SMYD's).
L'EGPWS emploie ces données pour détecter un
état de windshear : - La Radio Altitude (RA) ;
- La vitesse verticale à inertielle ;
- L'angle de lacet et de roulis ;
- L'accélération longitudinale ;
- L'angle d'attaque indiqué (AOA) ;
- La vitesse de fonctionnement minimum;
- La position des Flaps;
- La vitesse anémométrique vraie et
calculée.
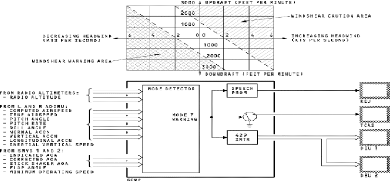
Figure III.15 : Schéma descriptif du
fonctionnement de l'EGPWS en mode 7.
III.9. La fonction Terrain Clearance Floor (TCF) :
C'est la surveillance d'un terrain dégagé proche
d'une piste d'atterrissage (enregistré dans la base de donnés)
lors de la descente de l'aéronef (en configuration d'approche et
d'atterrissage) ; cette fonction crée une enveloppe de
sécurité hors de laquelle l'EGPWC émet une alerte. L'EGPWS
reçoit les données des systèmes suivants :
- Le système de positionnement mondial (GPS) ;
- L'ADIRS (Air Data Inertiel Reference System);
- La Radio altimètre.
Si l'EGPWC constate que l'avion est au dessous du TCF, il donne
les alertes suivantes :
- Le message oral << Too Low Terrain>> qui se
répète pour chaque 20% de perte d'altitude ;
- Le message <<Terrain >> qui s'affiche sur le ND.
Si l'avion continue de descendre, les alertes qui se produisent
sont :
- Un message oral <<Pull Up >> ;
- Un message <<Terrain >> qui s'affiche sur le ND
;
- Un message <<Pull Up >> qui s'affiche sur le PFD
(Primary Fly Display).
III.10. La Fonction Terrain Awarness (TA) :
C'est le calcul et l'affichage du terrain survolé
autour de l'aéronef. Ce dernier étant en croisière ;
l'EGPWC compare la carte géographique stocké dans sa data base,
la route et la position actuelle de l'aéronef pour trouver s'il y a un
relief dangereux à l'avant de l'aéronef.
L'EGPWC reçoit les entrées pour le TA des
systèmes suivants : - Le GPS 1 & 2 ;
- L'ADIRU gauche et droit ;
- Le CDS (Common Display Unit);
- Le Radar météo ;
- Le Switch des trains d'atterrissage ;
Si l'EGPWC trouve que l'avion est à 60 secondes avant
d'arriver au terrain, il donne les messages suivants :
- Le message oral <<Caution Terrain>>;
- Le message <<Terrain >> qui s'affiche sur le ND ; -
Le relief qui s'affiche sur les NDs.
Si l'EGPWC trouve que l'avion est à 30 secondes avant
d'arriver au terrain, il donne les messages suivants :
- Le message oral <<Terrain Terrain Pull Up >> ;
- Le message <<Pull Up >> qui s'affiche sur le PFD; -
Le message <<Terrain >> qui s'affiche sur le ND ;
- Le relief qui s'affiche sur les NDs.
III.11. Les indications visuelles et auditives de
l'EGPWS :
|
Mode
|
Indication
|
|
Visuelle
|
Auditive
|
|
1-Pente de descente excessive
|
Pull Up (Rouge)
|
Sink Rate
|
Whoop Whoop
Pull Up
|
|
2-Taux d'approche excessif
|
Pull Up (Rouge)
|
Terrain, Terrain
|
Whoop Whoop
Pull Up
|
|
3-Perte d'altitude après
décollage
|
Pull Up (Rouge)
|
Don't Sink
|
-
|
|
4-Proximité du sol
4A : Trains entrant
4B : Volets entrant
|
Pull Up (Rouge)
|
Too Low
Terrain
|
Too Low Gear
|
|
Pull Up (Rouge)
|
Too Low
Terrain
|
Too Low Flaps
|
|
5-Descente au-dessous du G/S
|
Blow G/S (Amber)
|
Glide Slop
(SOFT)
|
Glide Slope
(HARD)
|
6- Descente au dessous du
minimum
|
-
|
Minimum
Minimum
|
-
|
7- Avertir pour condition
windshear
|
|
Windshear (Rouge)
|
|
Windshear
Windshear
|
|
Tableau III.1 : Les indications visuelles et
auditives de l'EGPWS
Dans le cas de plusieurs alarmes sonores au même temps
avec dix (10) différentes messages de EGPWS, il y'a une priorité
pour ces message. Le tableau suivant présente la priorité des
alarmes :
|
Priorité
|
Message
|
Mode
|
|
1
|
<< Windshear >>
|
7
|
|
2
|
<<whoop whoop - pull up >>
|
1&2
|
|
3
|
<<Terrain>>
|
2
|
|
4
|
<< Too Low -Terrain>>
|
4
|
|
5
|
<< Too Low - Gear >>
|
4A
|
|
6
|
<< Too Low - Flaps>>
|
4B
|
|
7
|
<< Mininums >>
|
6
|
|
8
|
<<Sink Rate>>
|
1
|
|
9
|
<<Don't Sink >>
|
3
|
|
10
|
<<Glide Slope>>
|
5
|
Tableau III.2 : Priorité des alertes
audio.
L'avertissement sonore qui est la première
donnée quand un mode est activé, identifie une configuration d'un
danger potentiel, sui sera bientôt corrigé par une investigation
immédiate effectuée par l'équipage, les avertissements ne
cessent que lorsque l'avion est hors de l'enveloppe du mode actif, à
l'exception du mode 2A ou il faut gagner 300 pieds d'altitude
barométrique pour faire arrêter l'alerte.
Dans le chapitre suivant nous programmerons les différents
modes de fonctionnement de l'EGPWS.
IV.1. Présentation du logiciel DELPHI 7 :
Le Delphi est un environnement de programmation visuel
orienté objet fonctionnant sous Windows, pour le développement
rapide des applications. Il met à la disposition des utilisateurs un
outil de développement d'interface graphique très conviviale,
simple, souple et rapide à utiliser. Pour cela, il utilise deux
éléments essentiels :
- Une Bibliothèque d'objet et de composant qui
s'appelle la VCL (Visual Component Library, c'est-à-dire
bibliothèque des composants visuels). Cette bibliothèque comporte
des composants visuels tels que : boutons, zone de saisie, listes
déroulantes, ...etc. ; et des composant non visuels tels que les
composants liés à la gestion des fichiers.
- Un langage de programmation : le Pascal Objet. Il s'agit d'un
ensemble d'extensions orientées objets, issues du Pascal Standard.
Un projet Delphi est généralement constitué
de deux éléments essentiels :
- Une interface: C'est un ensemble de fichiers sur lesquelles
on positionne des composants qu'on peut déplacer et modifier à
souhait. Cette interface est réalisée en utilisant les
éléments de la VCL, représentée en partie sous
forme d'une palette des composants dans l'environnement du Delphi.
- Un programme : C'est un ensemble d'instructions en Pascal
Objet.
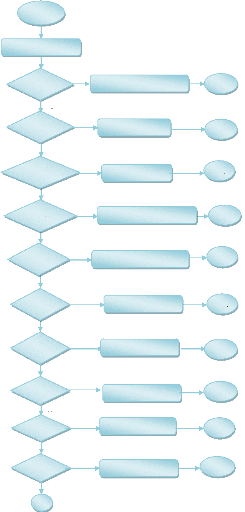
VI.2.Programmation des modes de fonctionnement :
Nous avons programmé sous Delphi 7 les fonctions des
sept modes de fonctionnement de l'EGPWS. Pour chaque mode nous avons
établi un organigramme défini selon le principe de son
fonctionnement.
IV.2.1. Les organigrammes des modes de l'EGPWS :
Dans cette partie nous présentons les organigrammes des
sept modes de fonctionnement de l'EGPWS
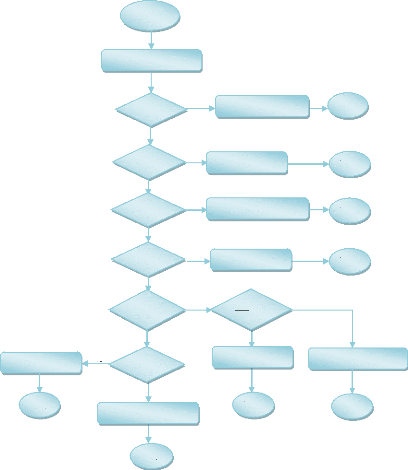
1. Les mode 1 : lorsque l'avion enregistre une
pente de descente excessive, deux messages sont entendus et affichés
selon le degré du danger (Fig IV.1).
- le message <<Sink Rate>> sera entendu et
l'indicateur <<Pull Up >> s'allumera si l'avion entre dans la
première zone d'avertissement.
- Le message <<Whoop Whoop Pull Up >> sera entendu et
l'indicateur <<Pull Up >> s'allumera si la situation devient plus
dangereuse.
Début
Introduire A et V
A<10
Oui
Inhibit System
FIN
Non
V<1000
Oui
No Alarm
FIN
Non
A-Cl Oui
>P1 No Alarm
V
FIN
Non
Oui
V<1500 "Sink Rate"
FIN
Non
"Sink Rate"
Oui
V<1710
Oui
A-
>P2
V
Non Non
Oui
FIN
A-
V
>P2
"Whoop Whoop Pull Up"
Non
FIN
"Sink Rate"
"Whoop Whoop Pull Up"
FIN
FIN
Figure IV.1: organigramme du mode 1.
Les constantes utilisées :
A : Altitude (Pieds).
V : Vitesse verticale (Pieds /Min).
P1 : Première pente, P2 : Deuxième pente, P3 :
Troisième pente.
C1, , C3 : constantes qui correspondent à P1, P2 et P3
lorsque A=0. P1= 0.61 min, P2=1.03 min, P3=0.41 min.
C1= - 600 Pieds, = -1535Pieds, C3= - 483Pieds.
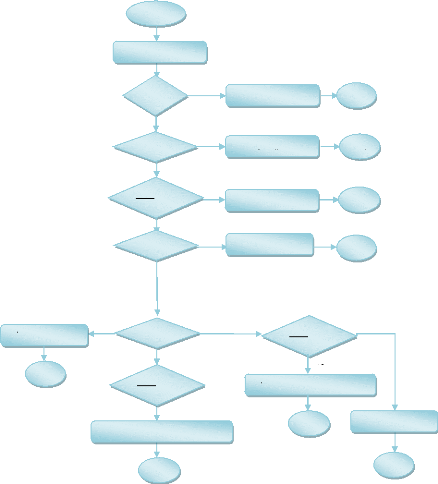
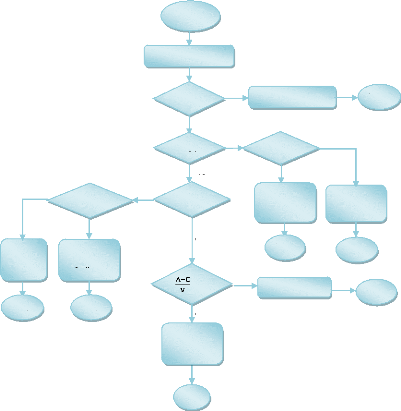
2. Le mode 2:lorsque l'avion enregitre un taux
de descente au terrain excessif, deux sous modes sont définis selon la
configuration de l'avion :
Début
Introduire A et V
Oui
A<30
Inhibit System
FIN
Non
Non
A<1650 1
Oui
Oui
V<2000 No Alarm
FIN
Non
Non Non
V<3250 V<375O 2
Oui
Oui
No Alarm
Non
A-Cl
V
>P1
A-
V
>P2
Non
No Alarm
FIN
Oui
Oui
FIN
Non
A-
V
>P2
A-
V
>P2
Non
"Terrain Terrain"
"Terrain Terrain"
Oui
"Whoop Whoop Pull Up"
Oui
FIN
FIN
"Whoop Whoop Pull Up"
FIN
FIN
38
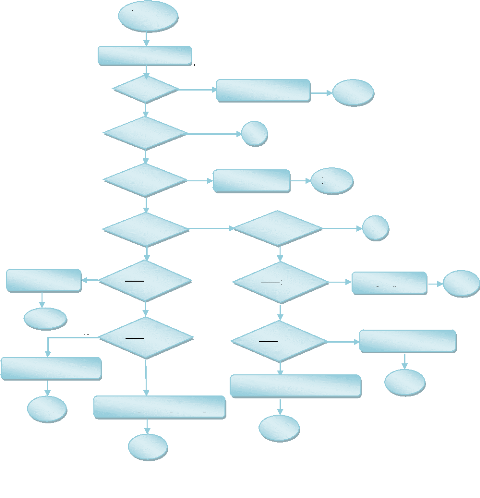
a. Le sous mode 2A : lorsque l'avion n'est
pas dans la configuration d'atterrissage (Volets moins que 30 unités),
un message auditif << Terrain Terrain>> sera entendu, si le taux
d'approche augmente l'alerte sera changée par un avertissement et le
message auditif par <<Whoop Whoop Pull Up >>. (Fig. IV.2)
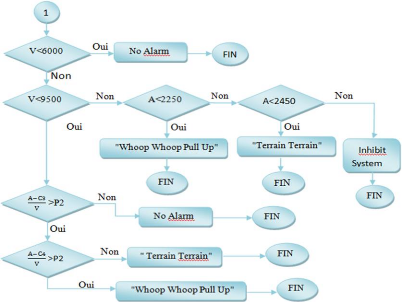
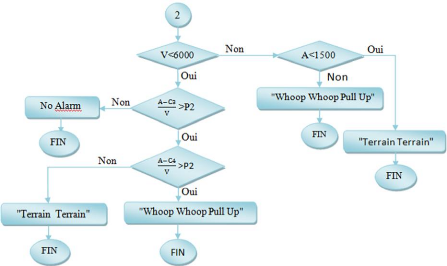
Figure IV.2 : Organigramme du sous mode 2A.
Les constantes utilisées :
A : Altitude.
V : Vitesse.
P1, P2 : Pentes.
C1, : Constantes qui correspondent à P1 lorsque A=0.
C3, C4 : Constantes qui correspondent à P2 lorsque A=0. P1= 0.93 Min,
P2= 0.22 Min.
C1= -1530 Pieds, = -1920 Pieds, C3= 352 Pieds, C4= 132 Pieds.
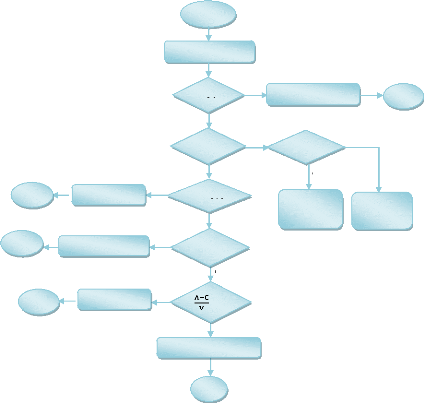
b. Le sous mode 2B : lorsque l'avion est dans la
configuration d'atterrissage (plus de 30 unités) un message d'alerte
sera entendu << Terrain Terrain », ce dernier se transformera en
avertissement si le taux d'approche augmente et le message auditif sera
<<Whoop Whoop Pull Up ». (Fig IV.3).
"Whoop Whoop Pull Up"
Début
Introduire A et V
Oui
A<30 Inhibit System
Oui
V<2253 No Alarm
Non
A<789 No Alarm
FIN
Non
>P No Alarm
Oui
Non
Non
Oui
FIN
FIN
FIN
FIN
Figure IV.3 : Organigramme du sous mode 2B.
Les constantes utilisées :
A : Altitude. V : Vitesse. P1: Pente.
C : Constante qui correspondent à P lorsque A=0. P= 0.95
Min, C= 1962 Pieds.
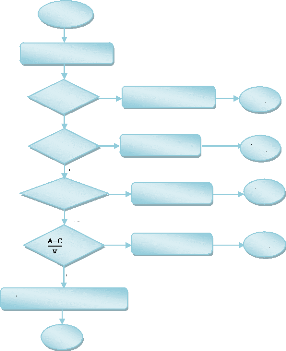
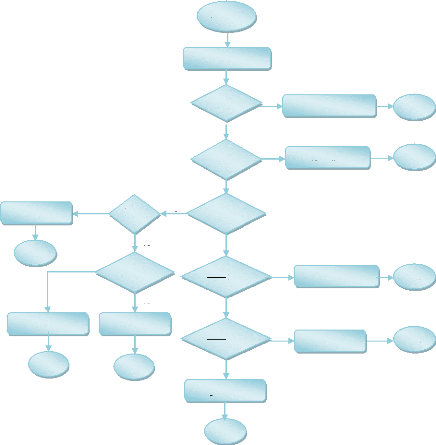
3. Le mode 3 : les alarmes du mode 3 se
produisent lorsqu'il ya une perte d'altitude après décollage, on
distingue deux sous modes:
a. Le sous mode 3A : il donne le message
auditif «Don't Sink» lorsque l'avion perd l'altitude après
décollage et cette perte dépend du taux
d'élévation. (Fig IV.4).
Introduire A et Ai
"Don't Sink"
A> 1500
Début
??? Non
?? >P No Alarm
Oui
A<30 Inhibit System
Oui
Ai<20 No Alarm
FIN
Non
Non
Oui
Non
Oui
No Alarm
FIN
FIN
FIN
FIN
Figure IV.4 : Organigramme du sous mode 3A.
Les constantes utilisées :
Ai : Altitude inertielle.
A : Altitude.
P : Pente.
C : Constante qui correspond à P lorsque A=0. P=14.7, C= -
264 Pieds.
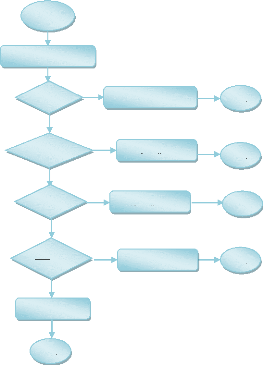
b. Le sous mode 3B : il donne le message
auditif « Too Low Terrain» lorsque l'altitude de l'avion est
élevée pendant le décollage avec un dégagement
minimum du terrain. (Fig. IV.5).
Introduire A et Ai
Début
FIN
Oui
A<30 Inhibit System
Non
FIN
Oui
A<150 No Alarm
Non
FIN
Oui
A<375 "Too Low Terrain"
Non
FIN
V<190 Oui No Alarm
Non
>P
Oui Oui
???
V<250
?
Non Non
No Alarm
Non
A<700
No Alarm
"Too Low Terrain"
Oui
FIN
"Too Low Terrain"
FIN
FIN
FIN
Figure IV.5 : Organigramme du mode 3B.
Les constantes utilisées :
V : Vitesse.
A : Altitude.
P= 5.41 Pieds/Noeuds. C= 652 Pieds.
4. Le mode 4 : il donne les alertes lorsque
l'avion est proche du sol, on distingue deux sous modes selon la configuration
de l'avion :
a. Le sous mode 4A : le message auditif
« Too Low Terrain» sera entendu lorsque les trains ne sont pas dans
la configuration d'atterrissage (trains entrants) et la vitesse de l'avion est
basse. (Fig IV.6).
Début
Introduire A et V
Oui
A<30 Inhibit System
FIN
Non
Oui
A<30 V<500
Non
Non
Oui
Non Non
A<1000
V<275
"Too Low Gear"
"Too Low Terrain"
Oui
Oui
No
Alarm
"Too Low Terrain"
FIN FIN
Non
>P
No Alarm
FIN
FIN
FIN
Oui
"Too Low Terrain"
FIN
Figure IV.6 : Organigramme du sous mode 4A.
Les constantes utilisées :
V : Vitesse.
A : Altitude.
P= 5.55 Pieds/Noeuds. C= - 526.25 Pieds.
b. Le sous mode 4B : il donne le message
auditif « Too Low Flaps» lorsque les trains sont sortants, les volets
ne sont pas dans la configuration d'atterrissage et la vitesse
anémométrique est faible (Fig. IV.7).
Début
Introduire A et V
A<30
Oui
Inhibit System
FIN
Non
Oui
A<245 V<159
Non
Oui
Non
FIN
No Alarm
Non
A<1000
Oui
"Too Low Flaps"
"Too Low Terrain"
FIN
Too Low Terrain
Non
V<275
Oui
Non
FIN
No Alarm
>P
Oui
"Too Low Terrain"
FIN
Figure IV.7 : Organigramme du mode 4B.
Les constantes utilisées :
V : Vitesse.
A : Altitude.
P= 7.1 Pieds/Noeuds. C= - 820 Pieds.
5. Le mode 5 : les alertes du mode 5 sont
données lorsque l'avion engage son atterrissage au dessous du Glide
Slope. L'EGPWC donne un message auditif «Glide Slope », le volume de
ce dernier change selon le danger. (Fig. IV.8).
Début
Introduire A et D
A<30
Oui
Inhibit System
FIN
Non
D<1.3
Oui No Alarm
FIN
Non
"Low G/S"
Oui
D<2
Non
A<150
FIN
Non
Oui
Oui
A<300
A-Cl
>P1
Non
No Alarm
FIN
F)
Non
Oui
"Speed G/S"
"Low G/S"
A- Non
F) >P2 "Low G/S"
FIN
Oui
FIN
FIN
"Speed G/S"
FIN
Figure IV.8 : Organigramme du mode 5.
Les constantes utilisées :
D : Déviation du Glide Slope (Dots). A : Altitude.
P1= -57 Pieds/Dots, P2= - 92 Pieds/Dots. C1= 224 Pieds, = 334
Pieds.
A=2500
Oui
"Twenty Five Hundrer"
FIN
Non
Introduire A et X
Début
A=1000
Oui
"One Thousand"
FIN
Non
A-X=100
Oui
"Plus Hundred"
FIN
Non
A-X=80
Oui
"Approching Minimum"
FIN
Non
Oui
A-X=0 " Minimum Minimum"
FIN
Non
Oui
A=500 " Five Hundred"
FIN
Non
Oui
A=400 " Four Hundred"
FIN
Non
A=300
Non
Oui
Oui
" Three Hundred"
FIN
A=200 " Two Hundred"
FIN
Non
Oui
A=100 " One Hundred"
FIN
Non
46
1
6. Le mode 6 : le mode 6 fournit des messages
lorsque l'avion se rapproche de la valeur minimum que le pilote a
insérée. L'EGPWC donne des messages auditifs qui consistent
à indiquer le nombre de pieds restant et cela à partir de 2500
pieds (Fig. IV.9).
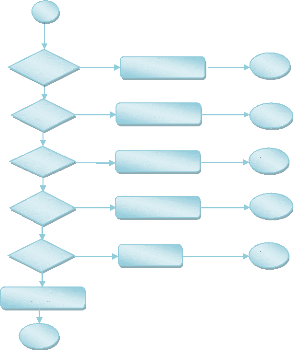
No Alarm
A=10
Oui
A=50 " Fifty"
A=30 " Theerty"
A=20
FIN
Oui
A=40 " Fourty"
1
Non
Non
Non
Non
Oui
Oui
Oui
" Twenty"
" Ten"
FIN
FIN
FIN
FIN
FIN
Figure IV.9 : Organigramme du mode 6.
Les constantes utilisées :
X : Hauteur de décision (Pieds). A : Altitude (Pieds).
- Bank Angle: les faibles angles d'attaque du
mode 6 se produisent quand l'angle d'attaque de l'avion est à plus de 10
degrés, le message auditif donné est «Bank Angle Bank Angle
». (Fig. IV.10)
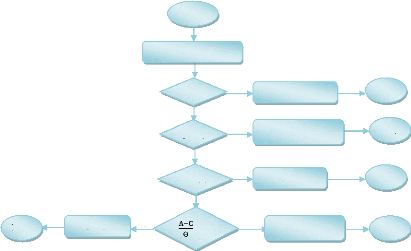
FIN
No Alarm
Non
Introduire A et ?
A>150
Début
? <10
Non
? <40
>P
Oui
Non
Oui
Non
Oui
Oui
No Alarm
No Alarm
"Bank Angle"
"Bank Angle"
FIN
FIN
FIN
FIN
Figure IV.10 : Organigramme du mode 6 (Bank
Angle).
Les constantes utilisées :
? : Angle de roulis (degrés). A : Altitude.
P= 4 Pieds/Degrés, C= -10 Pieds.
7. Le mode 7 : il donne un message auditif et
visuel « Windshear » lorsque il ya un vent cisaillant qui risque de
pousser l'avion verticalement vers la terre lors du décollage ou de
l'atterrissage. (Fig. IV.11).
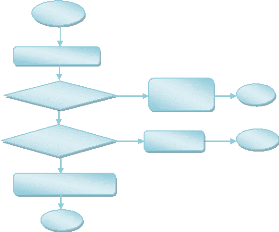
Introduire V et a
Windshear Warning
V-(P*a)>c2
V-(P*a)>c1
Début
FIN
Non
Non
Oui
Oui
No Alarm
Windshear Caution
FIN
FIN
Figure IV.11 : Organigramme du mode 7.
Les constantes utilisées :
V : Vitesse (Pied/Min).
a : accélération.
P1= P2 = P = -750 UI.
C1= 1500 Pieds/Min, = -1500 Pieds/Min.
IV.2.2. Présentation des interfaces:
Nous avons conçu une interface sous Delphi pour chaque
mode de l'EGPWS. Chaque interface contient :
- Un menu permettant de sélectionner l'un des modes.
- Une image d'un avion et une autre représentant le graphe
des alarmes de chaque mode.
- Deux édits correspondant aux paramètres duquel
dépend le mode sélectionné. - Des images des instruments
qui affichent les paramètres mesurés.
- Quatre labels.
- Un bouton "Résultat".
- Un bouton "Quitter".
1. Le mode 1 : la fenêtre du mode 1 est
construite afin de simuler une pente de descente excessive d'un avion en
croisière (Fig. IV.12).
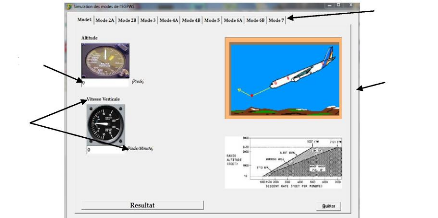
Sélection des modes
Édits
La fenêtre de
la simulation
Labels
Figure IV.12 : Fenêtre du mode 1.
2. Le mode 2 : la fenêtre du mode 2 est
utilisée pour simuler un grand taux d'approche. (Fig. IV.13).
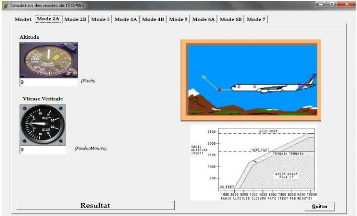
Figure IV.13 : Fenêtre du mode 2.
3. Le mode 3 : la fenêtre du mode 3 est
utilisée dans le but de simuler une perte d'altitude après
décollage. (Fig. IV.14).
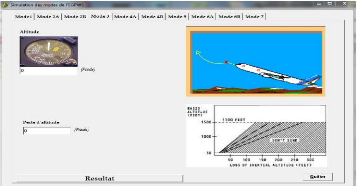
Figure IV.14 : Fenêtre du mode 3.
4. Le mode 4 : dans ce mode deux
fenètres été proposé:
- Le sous mode 4A : cette fenêtre est
conçue pour simuler la proximité du sol d'un avion avec les
trains d'atterrissage entrants (Fig. IV.15).
- Le sous mode 4B : la fenêtre du mode
4B est utilisée pour simuler la proximité du sol avec les volets
pas dans la configuration d'atterrissage. (Fig IV.16).
Chacune des deux fenêtres comporte Un bouton checkbox pour
simuler la position des trains d'atterrissage pour le sous mode 4A et les
volets pour le sous mode 4B.
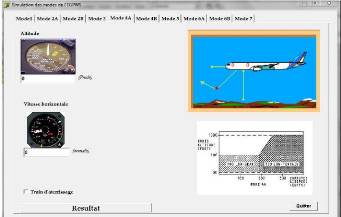
Figure IV.15 : Fenêtre du mode 4A.
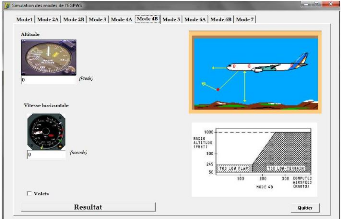
Figure IV.16 : Fenêtre du mode 4B.
5. Le mode 5 : la fenêtre du mode 5 est
utilisée pour représenter la descente d'un avion au dessous du
glide slope. (Fig IV.17).
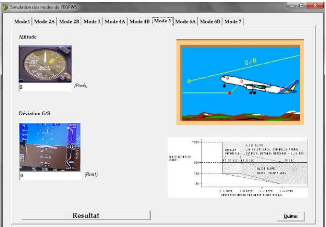
Figure IV.17 : Fenêtre du mode 5.
6. Le mode 6 : elle est conçue afin de
simuler la descente d'un avion au dessous d'un minimum choisi par le pilote.
(Fig. IV.18).
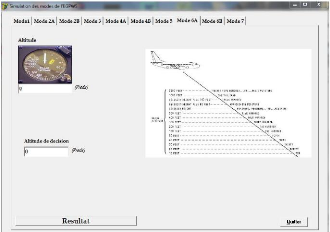
Figure IV.18 : Fenêtre du mode 6.
- Bank Angle : la fenêtre du mode Bank
Angle est utilisée dans le but de simuler un angle de roulis
supérieur à la norme. (Fig. IV.19).
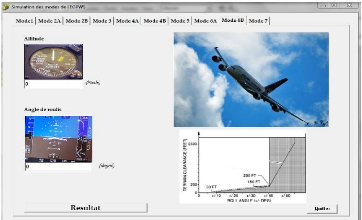
Figure IV.19 : Fenêtre du mode Bank
Angle.
7. Le mode 7 : le but de cette fenêtre est
de simuler un avertissement lorsqu'il ya un cisaillement du vent lors du
décollage ou l'atterrissage. (Fig. IV.20).
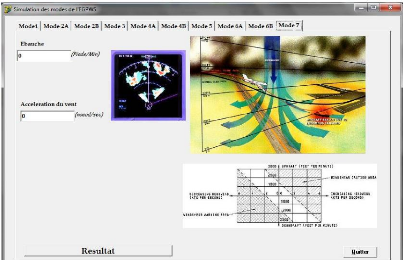
Figure IV.20 : Fenêtre du mode 7.
Dans le chapitre suivant, nous présentons une
méthodologie pour la recherche des pannes dans l'EGPWS.
V.1. Maintenance de l'EGPWS :
Il y'a une panne dès qu'un défaut apparait. Ce
défaut est un écart entre ce qui devrait être et ce qui
est. Souvent le dépanneur cherche à supprimer la panne sans
chercher les causes première. Si l'on veut réellement que la
panne ne se reproduise plus, il faut remonter à la cause première
d'où la nécessité de produire la chaine des causes.
Pour le cas de l'EGPWS, on peut principalement choisir deux
procédures de recherche de panne parmi les différentes
procédures existantes :
· L'auto test du système EGPWS.
· L'état des LEDs du panneau avant de l'EGPWS.
Pour qu'on puisse avoir accès à ces deux
procédures, il faut assurer les conditions suivantes :
- L'avion au sol ;
- La mise sous tension de l'EGPWS ;
- Sélectionner le mode ND (Navigation Display) de la
boite de commande EFIS en mode demi-cercle ;
- Sélectionner le commutateur TERR sur la boite de
commande EFIS CP (Control Panel); - Tous les systèmes d'interfaces
installés et activés.
Remarque : le mode demi-cercle de l'afficheur
ND est sélectionné dans la boite de commande EFIS, il permet au
pilote d'afficher le relief.
V.2. L'auto test de l'EGPWS : [1]
L'EGPWS a six (6) niveaux d'auto test. Chaque niveau fournit des
informations différentes. Les six niveaux de l'auto test sont :
- Test opérationnel ;
- Défauts des courants ;
- Configuration du système ;
- Historique de défauts ;
- Historique d'alertes/warnings ;
- Test d'entrée des signaux discrets.
1. L'auto test du niveau un (1) : le niveau
(1) "go/no go test operationnal " fournit des annonces auditives et visuelles
au niveau du poste de pilotage. On peut commencer un test de niveau (1) sur le
panneau avant de l'EGPWC mais on ne peut pas voir les annonces du poste de
pilotage, c'est pour cela qu'on utilise le EGPWM pour commencer le test
opérationnel de l'EGPWS.
Le test du niveau (1) est défaillant dans les conditions
suivantes :
- Il n'y a pas d'affichage du terrain.
- Affichage du message «TERR FAIL» sur le ND
(Navigation Display). - Absence de tous les messages, soit auditifs ou
visuels.
2. L'auto test des niveaux 2 à 5 : on
peut accéder à l'auto test des niveaux 2 à 5 par l'EGPWM
et l'EGPWC. Quand on emploi l'EGPWC, un écouteur de 600 ohms est
nécessaire pour écouter les messages du test. On branche
l'écouteur au jack sur le panneau avant de l'EGPWC (Fig. V.1). Si le
test est fait au poste de pilotage c'est-àdire en utilisant l'EGPWM,
l'information vient à travers les speakers du poste de pilotage. On
emploi le bouton self test sur le panneau avant de l'EGPWC ou le bouton self
test sur l'EGPWM pour obtenir un accès aux niveaux 2 à 5.
Bouton poussoir du self test
Jack de l'écouteur
|
|
Les trois (3) Leds du self test
|
|
FigureV.1 : Face avant de l'EGPWC
2.1. L'auto test du niveau 2 : un test de
dépannage du niveau (2) commence par un message auditif, "CURRENT FAULT"
(défaut de courant). S'il n'y a aucun défaut de courant, on
entend le message auditif "NO FAULT". S'il y a des défauts, le EGPWC les
annonce un par un. Une courte ou longue annulation termine le test du niveau
2.
2.2. L'auto test du niveau 3 : un test du
niveau 3 annonce la configuration de l'EGPWS, et commence par le message
auditif "SYSTEM CONFIGURATION". Une annulation courte conduit le test
immédiatement au prochain niveau de configuration. Une longue annulation
finit le test du niveau 3. Un test du niveau 3 fournit les informations
suivantes :
- Numéro de la pièce d'EGPWC ;
- Etat de modification d'EGPWC ;
- Numéro de série d'EGPWC ;
- Version de logiciel d'application ;
- Version de bases des données du terrain.
2.3. L'auto test du niveau 4 : le test de
niveau 4 montre l'historique de défauts de l'EGPWS au-dessous des dix
derniers vols. Un test de niveau 4 commence par un message auditif "FAULT
HISTORY". S'il n'y a aucun défaut dans la mémoire d'historique du
vol, nous entendons la déclaration de défauts, nous
commençons par le plus récent puis nous entendons les autres
défauts dans cet ordre :
- Vol X (X est le dernier segment de vol) ;
- Défauts internes pour le vol X ;
- Défauts externes pour le vol X.
2.4. L'auto test du niveau 5 : un test de
niveau 5 commence par un message auditif "WARNING HISTORY". S'il n'y a aucune
alerte dans la mémoire d'historique de vol, on entend le message auditif
"NO WARNING", s'il y a des alertes, on entend les alertes les plus
récentes d'abord.
2.5. L'auto test du niveau 6 : l'auto test
du niveau 6 peut être faite par EGPWC ou par l'EGPWM. Pour écouter
l'information de test de l'EGPWC, on utilise un écouteur, branché
au jack sur le panneau avant de l'EGPWC (Fig. V.1). Appuyer sur le bouton self
test sur le panneau avant de l'EGPWC ou le bouton self test sur l'EGPWM pour
obtenir l'accès au niveau 6.
V.3. L'état des LED sur le panneau avant de
l'EGPWC :
Il y a trois états LED sur le panneau avant de
l'ordinateur d'avertissement de proximité de sol EGPWC. (Fig. V.1). Les
indicateurs de LED montrent l'état de l'EGPWC quand l'alimentation est
assurée. Les LED s'allument pour ces conditions:
- Défaut externe : jaune ;
- L'ordinateur OK : vert ;
- L'ordinateur en panne : rouge.
Défaut externe
|
L'ordinateur OK
|
L'ordinateur en panne
|
Conditions
|
OFF
|
OFF
|
OFF
|
Alimentation de
l'EGPWC OFF
|
OFF
|
OFF
|
Rouge
|
Défaut interne
|
OFF
|
Vert
|
OFF
|
Opération normale
|
OFF
|
Vert
|
Rouge
|
Défaut interne
|
Jaune
|
OFF
|
OFF
|
Défaut externe
|
Jaune
|
OFF
|
Rouge
|
Défaut interne et externe
|
Jaune
|
Vert
|
Rouge
|
Défaut interne
|
Jaune
|
Vert
|
OFF
|
Défaut externe
|
|
Tableau V.1 : L'état des LED du
panneau avant d'EGPWC
Conclusion générale
L'objet de notre travail est l'étude descriptive du
système avertisseur de proximité du sol (EGPWS) ainsi que la
programmation et la simulation de ses sept (7) modes de fonctionnement.
Au terme de notre travail, nous avons été
amenés à étudier le système EGPWS et comprendre son
fonctionnement. Cette étude nous a nécessités de nous
documenter sur les notions d'aéronautique et d'avionique.
Nous avons programmé et simulé les modes de
l'EGPWS. L'interface graphique que nous avons développée sous
DELPHI est très simple d'utilisation, ce qui permettra aux exploitants
de comprendre les différents modes de l'EGPWS et de déduire
l'importance de ce système dans la sécurité des avions. La
plateforme mise en oeuvre pourrait être intégrée sur un
système de simulation de vol.
Par ailleurs durant notre stage au sein d'Air Algérie
nous avons mesuré l'importance du travail effectué par les
techniciens au sol car le système EGPWS ne peut garantir la
sécurité totale sans le contrôle technique au sol.
Nous avons simulé les sept (7) modes de l'EGPWS sous
DELPHI, nous souhaitons que les étudiants futurs puissent
l'améliorer et simuler l'architecture du système complet.
ANNEXE A : ARINC 429
L'ARINC 429 est un des plus anciens bus avionique,
développé par l'Aeronautical Radio Incorporation en 1977, il est
encore utilisé aujourd'hui sur de nouvelles plates-formes même si
d'autres bus plus récents existent. [4]
I. L'interfaçage du bus digital
numérique ARINC 429 :
L'industrie du transport aérien d'échange de
données entre avion et systèmes numériques est
généralement portée par le bus numérique ARINC 429.
Ce bus assure une série de communications unidirectionnelles d'un
système émetteur vers un ou plusieurs systèmes
récepteurs. La représentation électrique des
données binaires est incompatible entre le système et les bus, un
interfaçage spécial est nécessaire pour le système
d'envoi de données ainsi que pour le système de réception
de données. (Fig. A.1)
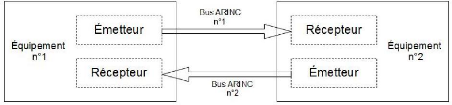
Figure A.1 : l'interface du bus
numérique ARINC 429
II. La comparaison électrique de l'ARINC 429
:
Dans la plupart des systèmes digitaux binaires qu'ils
soient embarqués sur avion ou pas, les deux niveaux binaires `0' et `1'
sont représentés par deux niveaux de voltage: 0V pour le `0'
binaire et 5V pour le `1' binaire. L'écriture et la lecture des deux
niveaux de tension sont synchronisées par une horloge. Par cette
méthode un bit est clairement distingué, cependant la
transmission des données binaires sur ce bus se fait sur une paire de
fils, on utilise une méthode différente pour séparer les
bits de données.
La méthode utilisée par le bus numérique
ARINC 429 est «Bipolar return to zero ». Cette technique est
utilisée pour ne pas confondre les signaux surtout dans la transmission
série (synchronisation). (Fig. A.2)
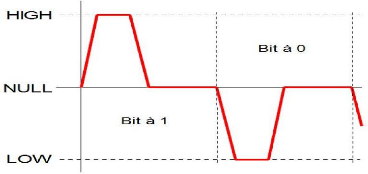
Figure A.2 : Comparaison électrique de
l'ARINC 429
Tableau A.1 : Comparaison électrique de
l'ARINC 429
Niveau
|
Côté transmetteur
|
Côté récepteur
|
HIGH
|
+10.0 V #177; 1.0 V
|
+6.5 à 13 V
|
NULL
|
0 V #177; 0.5V
|
+2.5 à -2.5 V
|
LOW
|
-10.0 V #177; 1.0 V
|
-6.5 à -13 V
|
|
III. Composition du mot numérique ARINC 429
:
L'information qui provient du bus de données ARINC 429
est un mot de 32 Bits. L'information de ce mot est partagée comme
suit:
- Bits 1-8 (Label) : Identificateur du type de
données se trouvant dans le mot.
- Bits 9-10 (SDI) : (Source/Destination
Identifier) identifie le système source ou bien le système de
destination du multi-système d'installation.
- Bits 11-28 ou 29 (Data) : contient
l'information.
- Bits 29 ou 30-31 (SSM) : (Sign Status Matrix)
identifie le signe et la direction caractéristique de la donnée
et l'état de la transmission hardware.
- Bits 32 : bit de parité. (Fig. A.3)

Figure A.3 : Bus numérique ARINC 429
ANNEXE B : Généralité sur
l'aérodynamique de l'avion
Le pilotage d'un avion consiste à :
· maintenir l'avion sur sa trajectoire, ou bien
· commander et contrôler une variation de
trajectoire, dans le plan vertical ou dans le plan horizontal.
L'avion est soumis à des forces dues aux mouvements de
l'atmosphère qui l'entoure.
· faible perturbation: le pilote laisse l'avion moyenner sa
trajectoire.
· forte perturbation: l'équilibre initial est
modifié, le pilote agit sur les gouvernes pour que l'avion revienne
à sa position initiale.
Un avion peut être représenté dans le
trièdre de référence formé par: (Fig.B.1)
· l'axe x : axe longitudinal ou axe de roulis (couleur
rouge);
· l'axe y : axe transversal ou axe de tangage (couleur
bleue) ;
· l'axe z : axe de lacet. (couleur vert).
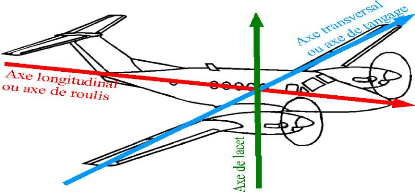
Figue B.1 : Convention d'axe en
aéronautique
Roulis : (Fig.B.2)
C'est le mouvement de rotation d'un mobile autour de son axe
longitudinal (axe de roulis). En aviation, ce mouvement est commandé par
une action latérale sur le manche.
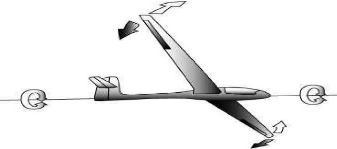
Figue B.2 : Mouvement de roulis
Tangage : (Fig.B.3)
C'est l'oscillation d'un appareil dans le sens de sa longueur,
lorsque son nez va d'avant en arrière, ou angle que forme ce dernier
au-dessus ou en dessous de l'horizon.
Pour contrôler le tangage, le pilote se sert de la
gouverne de profondeur, située sur le stabilisateur. Pour ce faire, il
pousse le manche en avant pour abaisser le nez de l'appareil et le tire en
arrière pour le relever.

Figue B.3 : Mouvement de tangage
Lacet : (Fig.B.4)
C'est le mouvement de rotation horizontal d'un mobile autour
d'un axe vertical. En aéronautique, ce mouvement est commandé par
l'action sur les palonniers.
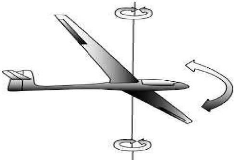
Figue B.4 : Mouvement de lacet
ANNEXE C : EFIS (Electronic Flight Instrument
System)
I. Description de l'EFIS :
Les EFIS (Electronic Flight Information Systems)
désignent les nouveaux systèmes de présentation des
instruments de bord sur écrans. Les premières
générations d'EFIS faisaient appel à des tubes
cathodiques, remplacés aujourd'hui peu à peu par les
écrans à cristaux liquides qui seront vraisemblablement
supplantés à leur tour prochainement par les nouvelles
générations
Sur les EFIS sont regroupées les informations
auparavant disponibles sur les instruments dits "classiques" tels que
l'altimètre, le variomètre, le badin, les paramètres
moteurs, les paramètres des circuits, l'horizon artificiel etc... Ce
type de représentation permet d'éviter la multiplication des
cadrans de toutes sortes, mécanismes électromécaniques
complexes et fragiles et de regrouper toutes les informations d'une
façon nettement plus ergonomique. De plus, un même écran
pouvant accueillir des informations différentes alternativement, un gain
de place majeur est réalisé sur la planche de bord. L'adjonction
facile de représentations colorées aux teintes variables et la
possibilité d'introduire des éléments dynamiques
enrichissent encore l'affichage.
Traditionnellement, l'architecture des EFIS est bâtie
autour de 4 écrans dont 2 sont doublés afin de fournir les
informations principales de la même façon aux deux pilotes.

Figure C.1 : l'EFIS Electronic Flight
Instrument System
II. Constitution de l'EFIS :
En premier lieu, nous parlerons de l'écran le plus
important : le PFD (Primary Flight Display). Chaque pilote
dispose d'un PFD devant lui. Sur cet écran sont regroupés tous
les paramètres primaires du vol dont l'horizon artificiel,
l'altimètre, variomètre, conservateur de
cap, Machmètre ainsi que les informations d'engagement
ou d'armement des automatismes et des directeurs de vol. D'autres informations
peuvent se greffer temporairement sur le PFD telles que l'ILS. (Fig.C.2)
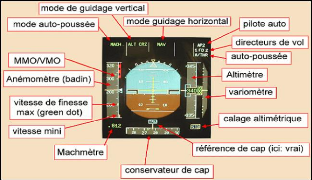
Figure C.2 : Le PFD Primary Flight Display
Deuxième écran majeur: le ND
(Navigation Display). Comme le PFD, il en existe un pour chaque
pilote. Sur cet écran sont affichés les paramètres de
navigation, soit de façon classique en reproduisant un instrument tel
que le VOR ou l'ILS soit par le biais d'une carte, dessinée et
représentant non seulement l'avion mais également sa route et la
position de repères de navigation significatif alentour selon le choix
de l'équipage. Cette représentation carte est un des
progrès les plus essentiels des EFIS. Non que
précédemment, les équipages ignoraient où ils
étaient mais dans le sens où cette information devait être
élaborée intellectuellement en fonction de paramètres
trouvés sur de multiples indicateurs. (Fig.C.3)

Figure C.3 : Le ND Navigation Display
ANNEXE D : Définition de quelques notions
aéronautiques.
Altitude:
Hauteur de l'avion au-dessus d'un niveau de
référence. L'altitude au-dessus du niveau du sol (AGL) est
l'élévation absolue au-dessus de la terre. L'altitude au-dessus
du niveau moyen de la mer (MSL) est l'élévation au-dessus du
niveau moyen des océans.
Altitude barométrique :
C'est l'altitude indiquée lorsque l'altimètre
est réglé à 1 013 pa. L'altitude barométrique est
utilisée dans plusieurs calculs importants comme la détermination
de l'altitude densimétrique, l'altitude vraie et la vitesse vraie.
AOA : (Angle Of Attack)
C'est l'angle formé entre l'aile et les filets d'air
qu'elle rencontre, ou encore entre une référence fuselage de
l'avion et sa trajectoire. En vol horizontal, l'assiette correspond à
l'angle d'attaque.
Assiette :
C'est l'angle compris entre l'axe longitudinal de l'avion et
l'horizontale. C'est aussi la hauteur du repère pare-brise par rapport
à l'horizon.
Azimut :
Mesure angulaire réalisée dans un plan
horizontal et dans le sens horaire à partir de la direction fixe de
référence d'un objet. Deux points situés sur des portions
adjacentes et qui s'étendent à partir du même angle droit
dits à 90 degrés en azimut l'un de l'autre.
Cap magnétique :
C'est la direction dans laquelle un appareil est
orienté. Elle est mesurée en fonction du nord magnétique
et s'affiche sur le compas magnétique. Pour voler un pilote
détermine le cap magnétique en compensant la différence
entre le nord géographique et le nord magnétique.
CFIT (Controlled Flight Into Terrain):
L'impact sans perte de contrôle CFIT est un accident au
cours de quel un avion maitrisé par un équipage de conduite qui
contrôle totalement l'avion mais se fait une fausse idée de sa
situation dans le plan vertical et/ou horizontal et par conséquence
conduit par inadvertance vers le relief, un obstacle ou un plan d'eau, sans
qu'il ait suffisamment du temps ou qu'il soit averti à temps pour
prévenir l'accident.
Décrochage :
Le décrochage est une subite perte de portance
causée par une interruption du flux d'air normal sur la surface
supérieure d'une aile. Un décrochage est un
phénomène aérodynamique et n'a rien avoir avec le moteur.
Il se produit lorsque l'angle d'incidence d'une aile atteint une valeur
spécifique appelée angle d'incidence critique. C'est cet angle
entre l'aile et l'air (et non la vitesse de l'appareil, son poids ou son angle
d'inclinaison par rapport à l'horizon) qui détermine le moment
où l'aile décroche.
Mach:
Mach = V/A = Vitesse de l'avion/Vitesse du son.
Mile Nautique :
Unité de mesure de distance (1 mile nautique = 1
825m).
Noeud :
Unité de mesure de vitesse (1 noeud = 1 mile nautique/h =
1.825Km/h). Pieds :
Unité de mesure d'altitude (1pied = 0.33m).
Vitesse anémométrique :
· Vraie : c'est la vitesse réelle de l'avion
relativement à l'air autour d'elle.
· Indiquée : c'est la vitesse comme mesurée
par les sondes de l'avion.
· Calibrée : c'est la vitesse
anémométrique indiquée corrigée pour l'erreur
d'installation
Windshear :
Le Windshear se produit lorsque il y'a une différence
dans la vitesse ou la direction des vents entre deux points de
l'atmosphère. Selon que les deux points de référence sont
à des altitudes différentes ou à des coordonées
géographiques diférentes, le cisaillement est dit vertical ou
horizontal. Le Windshear est l'effet d'un grand volume d'air qui change de
direction subitement. Le type le plus dangereux de Windshear est le Microburst,
qui ne laisse pas au pilote suffisamment du temps pour réagir.
Bibliographie
Manuels de maintenance:
1. AMM : Aircraft Maintenance Manual du BOEING 737NG
(34-46-00).
2. CMM : Compement Maintenance Manual du BOEING 737NG
(34-46-00).
Ouverages :
3. Dictionnaire de l'aéronautique et de l'espace
ANGLAIS-FRANÇAIS. VOL 1.8e Edition Eight printing.
4. Thèse d'ingénieur (2003-2004) sous le
thème: `Etude de l'ARINC 429 et la réalisation d'un module de
conversion Binaire/ARINC-ARINC/Binaire', présentée par Hamza
BELLOTI. Département de l'aéronautique Blida
5. Thèse de DEUA (2007-2008) sous le thème: `Etude
du système amélioré d'avertissement de proximité
sol EGPWS du Boeing 737NG', présentée par Meriem BENAZZOUZ.
Département de l'aéronautique Blida
Sites Internet:
6.
http://controleaerien.pagesperso-orange.fr/ils.html
(20/05/2012 à 21h:58)
7.
http://www.aviationpros.com/article/10387134/radio-altitude-the-instrument-of-choice
(20/05/2012 à 22h:30)
8.
http://www.aero-training.fr/datas/pdf/060%20-%20Radionavigation.pdf
(21/05/2012 à 00h:53)

