Introduction générale
Les collisions avec le relief sans perte de contrôle
CFIT (Controlled Flight Into Terrain) constituent depuis l'avènement de
l'aviation commerciale dans les années cinquante, la majorité des
cas d'accidents aériens. Ce type d'accident est d'autant plus dramatique
que l'enquête technique montre, qu'avant l'impact, l'avion était
en état de navigabilité, que ses systèmes de bord
fonctionnaient de façon normale mais que l'équipage n'avait pas
conscience de l'imminence de l'accident.
L'ensemble des professionnels de l'aéronautique s'est
donc penché sur ce problème crucial pour la
sécurité du trafic aérien et un certain nombre
d'état ont engagé des études portant sur la
réalisation des différents appareils et instruments fiables et
précis, afin de faciliter la conduite des avions et prévenir ce
type d'accidents.
Parmi ces instruments de bord, on trouve le TAWS (Terrain
Awareness Warning System), plus connu sous le nom GPWS (Ground Proximity
Warning System). Le GPWS est installé à bord des avions,
génère des alarmes avancées, sonores et visuelles dans le
poste de pilotage, pour condition de vol dangereuse proche du sol.
Le GPWS a sept (7) modes basique de fonctionnement,
associés chacun à des niveaux d'alerte qui sont fournis de
façon audio à l'équipage. Pour une fonction donnée
donc selon la priorité de l'alarme ; l'origine de l'information ;
l'état de la fonction c'est-à-dire selon le mode
sélectionné, il apporte à l'équipage les
informations sonores les plus appropriées.
Avec le GPWS, la proximité avec le sol était
bien gérée mais la détection des alertes était
très grossière malgré ses sept niveaux définis avec
des priorités différentes. Ses fonctions ont donc
été couplées avec une fonction d'alerte et d'affichage du
terrain: c'est l'Enhanced GPWS. Il a été également
amélioré en intégrant une corrélation entre la
position de l'avion et la base de données terrain mondial qui est
embarqué dans ce système. Ceci se traduit par la
présentation d'une image de terrain au pilote et d'alerte visuelle et
audio. Ces améliorations permettent d'enrichir l'ensemble des
informations fournies à l'équipage, de façon à lui
assurer la meilleure conscience de son environnement dans les situations
délicates.
Notre travail consiste à étudier et à
simuler les fonctions de l'EGPWS sous DELPHI. Nous avons organisé ce
mémoire en cinq (5) chapitres :
· Dans le premier chapitre nous présentons un petit
aperçu sur la radionavigation ;
· La description du système EGPWS fait l'objet du
second chapitre ;
· Le troisième chapitre est consacré au
fonctionnement de l'EGPWS ;
· La programmation et la simulation des sept (7) modes de
fonctionnement l'EGPWS sont présentés dans le quatrième
chapitre ;
· Nous avons jugé utile de rajouter en
cinquième chapitre la méthodologie de recherche de pannes
à effectuer sur l'EGPWS ;
· Enfin nous terminerons par une conclusion
générale.
I.1.La radionavigation:
La radionavigation est une technique de navigation utilisant
des ondes radioélectriques pour déterminer la position de l'avion
ou un lieu de position. On distingue les systèmes de positionnement
passifs sans émetteurs à bord, et les systèmes actifs avec
transmission entre mobile et base.
Les instruments de la radionavigation utilisent des stations
au sol, ou des satellites (GPS), pour fournir des indications sur la position
de l'avion dans l'espace. Les principaux systèmes de radio navigation
encore utilisés de nos jours sont :
- L'ILS (Instrument Landing System);
- Le GPS (Global Positioning System);
- Le RA (Radio Altimeter).
I.1.1.Le système d'atterrissage aux instruments
(ILS):
L'ILS (Instrument Landing System), système
d'atterrissage aux instruments est une aide d'approche à l'atterrissage
de l'avion. Son rôle est de fournir au pilote les indications en site et
en azimut pour l'amener dans l'axe de la piste et lui donner un angle de
descente (trajectoire idéale de descente). (Fig. I.1). Il comprend :
- Un localizer : fournit l'écart de l'avion par rapport
à l'axe de la piste;
- Un glide path : fournit l'écart de l'avion par rapport
à la pente nominale d'approche ; - Des radiobornes (markers).
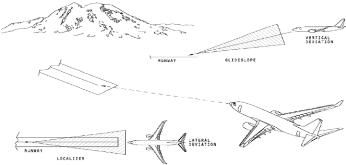
Figure I.1 : Le système d'atterrissage
aux instruments (ILS)
a. Théorie de Localizer : le localizer
est une aide à la navigation à courte distance. Il fournit au
pilote une indication continue d'écarts par rapport à un plan
verticale passant par l'axe de la piste. L'information est donnée
à bord sur un indicateur d'écart. L'aiguille de ce dernier est
centrée lorsque l'avion est dans le plan vertical passant par l'axe de
la piste. Lorsque l'avion est en phase d'approche, le sens de la
déviation de l'aiguille
indique le sens de la manoeuvre à effectuer (gauche ou
droite). Il est constitué par un ensemble d'antennes situées
après le bout de la piste qui émettent une porteuse VHF entre 108
et 112 MHz. (Fig. I.2). [6]

Figure I.2 : Antenne Localizer
Le principe de fonctionnement du Localizer est comme suit: [6]
- Emission: L'ensemble d'antennes envoie une
porteuse VHF modulée en amplitude sur deux fréquences (90HZ et
150HZ).
- Réception: Le récepteur du
localizer reçoit deux signaux de 90HZ et 150HZ et compare le taux de
modulation des deux lobes. Si l'appareil de se trouve à gauche par
rapport à l'axe de la piste, le signal de 90HZ va prédominer et
l'indication de déviation du Localizer se positionnera à droite
pour indiquer que l'axe de la piste d'atterrissage se trouve à droite.
Par contre, si l'avion se trouve à droite de l'axe de la piste, le
signal de 150HZ prédominera, et l'indication de déviation se
positionnera à gauche. Si l'avion est sur l'alignement de piste, les
taux de modulation sont égaux, l'aiguille reste donc à sa
position neutre c'est-à-dire au centre.
b. Théorie du Glide: le Glide est une
aide de navigation à courte distance. Il fournit au pilote une
indication continue d'écart oblique matérialisant le plan de
descente. L'information est présentée à bord sur un
indicateur d'écart centre. Le sens de déviation de l'aiguille
indique le sens de manoeuvre à effectuer (montée ou descente). Il
est constitué par
un ensemble d'antennes, qui émettent une porteuse UHF
entre 328,65 et 335,40 MHz (Fig. I.3).
Figure I.3 : Antenne du Glide Slope.
Le principe de fonctionnement du Glide est comme suit:
- Emission: Le Glide est composé d'un
système de deux antennes directives. Ces antennes rayonnent de
façon différente des porteuses modulées à 90HZ et
150HZ. Le lobe supérieur modulé en amplitude à 90HZ tandis
que le lobe inférieure est modulé à 150HZ.
- Réception: Le récepteur du
glide reçoit les deux signaux 90HZ, 150HZ et compare leur taux de
modulation. Si l'appareil se trouve au-dessus de la trajectoire de descente, le
signal de 90HZ aura une amplitude plus grande que celle de 150HZ et
l'indicateur montrera que la trajectoire de descente est en dessous de l'avion,
l'indicateur du glide sera en dessous de l'avion. Mais si l'appareil est en
dessous de la trajectoire de descente le signal de 150HZ prédominera et
l'indicateur du glide sera au-dessus de l'avion.
c. Les radio-bornes (markers): le système
ILS est complété par trois radio-bornes à rayonnement
vertical, situé sur l'axe d'approche à des distances
caractéristiques :
- Passage à 7200m de hauteur (Outer Marker OM) ;
- Passage à 1050m de hauteur (Middle Marker MM) ;
- Passage à 30m de hauteur (Inner Marker IM).
Ils donnent une information sonore et visuelle d'écart
discontinue de distance par rapport à un seuil de piste.
| 
