I.3. Le
MGD d'un robot manipulateur
Il exprime la position et l'orientation du repère de
référence  lié à l'outil, relativement à un repère
fixe lié à l'outil, relativement à un repère
fixe  , celui de l'atelier par exemple, en fonction des variables
articulaires motorisées (et asservies électroniquement)
q1, q2 ... qn du
mécanisme. , celui de l'atelier par exemple, en fonction des variables
articulaires motorisées (et asservies électroniquement)
q1, q2 ... qn du
mécanisme.
Après avoir donner les quatre paramètres  de tous les repères du robot, ainsi que la façon dont sa
base est située dans l'espace, on peut complètement indiquer la
géométrie du bras à n'importe quelle moment. de tous les repères du robot, ainsi que la façon dont sa
base est située dans l'espace, on peut complètement indiquer la
géométrie du bras à n'importe quelle moment.
Le MGD est obtenu par la multiplication successive des
matrices de passage entre repères, il est exprimé donc sous forme
d'une matrice définit comme suit :
 (I-6)
(I-6)
Il peut aussi être représenté par la
relation :  (I-7) (I-7)
où :
X : est le vecteur des
coordonnées opérationnelles, il peut être défini
avec les éléments de la matrice tel que : tel que :
 (I-8) (I-8)
q : est le vecteur des variables
articulaires, noté :
 (I-9)
(I-9)
I.4.
Représentation des coordonnées opérationnelles
Pour définir la situation de l'organe terminal du robot
dans l'espace, il faut préciser sa position et son orientation.
Soit  (I-10)
(I-10)
où  représente les trois coordonnées opérationnelles
de position et représente les trois coordonnées opérationnelles
de position et  représente les coordonnées opérationnelles
d'orientation. représente les coordonnées opérationnelles
d'orientation.
Pour les coordonnées  tout le monde s'accorde pour choisir les composantes
cartésiennes, mais pour spécifier une rotation, la matrice tout le monde s'accorde pour choisir les composantes
cartésiennes, mais pour spécifier une rotation, la matrice  présente un nombre surabondant de paramètres (neuf),
tandis que, seul trois paramètres indépendants sont suffisants
pour une telle représentation. présente un nombre surabondant de paramètres (neuf),
tandis que, seul trois paramètres indépendants sont suffisants
pour une telle représentation.
Plusieurs choix sont possibles et adoptés en pratique
pour les coordonnées  : :
-- angles d'Euler
quaternions d'Euler
angles de Cardans (Roulis - Tangage - Lacet) : c'est la
méthode qu'on a choisi pour notre travail.
I.4.1. Les angles de Cardans
(Roulis - Tangage - Lacet « RTL »)
Par analogie avec la terminologie des pilotes de
véhicules, des avions notamment, dont la direction du mouvement est
supposée dans le sens de l'axe z, les angles de roulis
( ), tangage ( ), tangage ( ) et lacet ( ) et lacet ( )?, présentent trois rotations successives défini comme
suit [KHA 99] : )?, présentent trois rotations successives défini comme
suit [KHA 99] :
 (I-11)
(I-11)
ce qui donne la
matrice de rotation suivant:
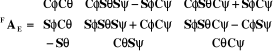 (I-12) (I-12)
L'expression de ces angles en fonction des cosinus directeurs
est comme suit :
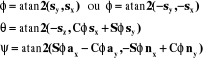 (I-13)
(I-13)
Les coordonnées opérationnelles sont donc
données par le vecteur:  (I-14)
(I-14)
| 

