EPIGRAPHE
1. « On parle parfois du rôle du
hasard dans la découverte scientifique, mais le mérite du savant
servit par l'imprévu, c'est d'avoir étésavant,
d'avoir eu l'esprit tendu vers la solution du problème. » J.
LALOUP
2. « Le hasard ne favorise que les esprits qui
y ont étépréparés.
»
Albert EINSTEIN
3. « Le hasard, c'est le chemin que DIEU
emprunte lorsqu'IL veut rester anonyme. »
Albert EINSTEIN
IN MEMORIUM
A vous, papa Jean TENFUMA LULENGA,
papa Boniface et papa William MULENGA
NGOMBE, vous que la mort a arrachés de la portée de
nos yeux, mais pas de nos coeurs. Que le fruit de cette oeuvre, que vous aviez
vue commencer et que vous aviez désiré voir s'achever, soit une
gerbe de fleurs sur vos tombes. Aujourd'hui, pendant qu'elle s'achève,
vous êtes incapables de nouer un pagne aux hanches pour danser la
victoire qui visite votre camp. Nous manquerons d'ouïr vos ovations et
cris de joie.
DEDICACE
A notre Seul Sauveur et Seigneur ;
A nos aimables et dynamiques parents ;
A notre précieuse et compatissante épouse ; A nos
rejetons ;
A nos oncles et tantes ;
A nos biens aimés frères et soeurs ;
A nos cousins et cousines ;
A nos neveux et nièces ;
A nos amis et connaissances ;
Au monde scientifique ;
A tous les humains ;
Nous dédions ce travail, couronne de sacrifices
indescriptibles.
MATANDA KINAMA Tristan
AVANT PROPOS
Il est une exigence académique que tout étudiant
présente et défende un mémoire devant sanctionner la fin
de ses études universitaires. Nous n'avons pas été
exempté de cette condition et c'est la raison d'être de ce
mémoire. Sa rédaction n'a pas été l'oeuvre de notre
mais seule, mais bien une sommation de plusieurs forces partielles, tant
positives que négatives, que nous tenons de remercier.
Avant toutes choses, qu'il nous soit permis de remercier notre
Seul Seigneur et Sauveur, le CHRIST JESUS, en qui
DIEU nous a élu avant qu'aucune
poussière de la terre ne soit créée à être
Ses enfants d'adoption, selon le bon plaisir de Sa volonté.
Nos sentiments de gratitude vont à l'endroit du
Professeur docteur ingénieur Alain DELCHAMBRE
pour avoir proposé le sujet de ce travail et avoir accepter d'en assurer
la direction en dépit de la distance et de ses multiples engagements
à l'ULB (Université
Libre de Bruxelles) et dans
plusieurs universités du monde.
Nous ne saurons combien remercier
l'ingénieur Vincent VANDAELE, chercheur au
service de mécanique analytique de la faculté polytechnique de
l'ULB, pour nous avoir fait
bénéficiaire, de sa part, d'un encadrement rigoureux et
scientifique à la hauteur de nos aspirations.
Nous nous faisons, à travers ce travail, le noble
devoir de remercier tous les professeurs, chefs des travaux, assistants et
techniciens de la faculté polytechnique de l'université de
Lubumbashi (UNILU), de
l'université de Kinshasa
(UNIKIN), de l'université libre de
Bruxelles (ULB), de
l'université catholique de Louvain
(UCL), de l'université de
Mons qui se sont disposés pour nous engendrer
« ingénieur ». De manière particulière, nous
pensons aux professeurs : MULAPI WA
LUMENGE, SUMUNA TEMO, KALENGA NGOIE,
KAMABU TSONGO, LIASSA NKOY, MUTONDO Ruffin, FRANCOIS
NTAMBWE, LIVIU MASALAR, Augustin MPANDA pour leur sacrifice en
notre faveur.
Nous remercions de tout coeur notre cher papa
Félix Emmanuel KAZEMBE MATANDA KINAMA pour
avoir beaucoup investi dans notre vie en général et nos
études en particulier, et notre chère mère
Philomène Wernemine Marie-Emman KASONGA MESOLENGA
MASHAMO pour ses grands sacrifices visant à faire de nous
des vases utiles.
Il serait impardonnable si nous manquons de remercier notre
précieuse épouse, Jackie Suzanne Nadine KAMIN NAWEJ
NAMBUND pour son affection et sa présence remarquable dans
notre vie.
Ne pas honorer l'apport de nos frères et soeurs, oncles
et tantes, cousins et cousines, beaux-frères et belles-soeurs, amis et
connaissances serait un péché. Nous pensons à : Oncle
Chadrac KAZEMBE et tantine
BANZA, papa Benoît MATANDA, maman
Guislaine MUJINGA et maman Agnès
LUMBWE, papa Norbert MAMBWE et maman
Charlotte MWISHIBWE, papa Honoré
NGOIE et maman Phalonne NGOIE, vieux
Placide KINKUKU et da
Mamie, tonton Louis MASENGO et
tantine Constance ILUNGA, tonton
Dieudonné KABOBA et tantine Rose
NGONGA, vieux Johny KAPEND et
da Espérance MUJINGA,
vieux Hubert KAUMBA et da
Pélagie, vieux Pierre
NGOIE et da
Euphrasie,vieux Gerard
KILOLO, Maurice KASONDE, Olivier
MUSONA, Clément MWEPU, Micky
MUKINGA, Auguy KAZEMBE, David
KAZEMBE, Daniel KAZEMBE, Esther
KASONGO, Seraya KAZEMBE, Mishael
WAMALELE, Abigaïl KIPETE, Rabbim
MWAPE, Thethe MILAMBO, Ignace
LUKUNSHA, Priscille, da Marie, vieux
Jean, Tshetshe NAWEJ , da
Kannie, Aimé, Gabby
et Francine, Yannick MBUMB et
Jolie, Clémence URUNG,
Julie MWAD, MUMBA, Florence MUJINGA,
Prince MWAZAZ .
Nous remercions également nos beaux-parents, papa
NAWEJ WANKAMB et maman Benedicte MUJINGA
CHANDA, qui, dans notre vie, ont surgie au temps décisif
pour donner leur part.
Que notre grand ami et frère dans le Seigneur,
Donat KITAMBILE, trouve ici l'expression de notre
profonde gratitude.
Nous ne saurons combien remercier les contributions de notre
bien aimé frère dans le Seigneur, ingénieur
Bertin POLOMBWE et son épouse
Chouchou NYUNDU.
Enfin, nous remercions nos amis de lutte et nos frères
en CHRIST, les un pour leur sympathie et les autres pour leur soutien et leurs
prières. Particulièrement, nous pensons à :
Erick SHIMBI, Mao NGOIE
MWEPU, Jonathan MUMBA,
Victor MUGANZA, Jean MBAZ...
Que tous celui qui lira ces phrases se voie honoré !
Pour cela et pour plus encore, nous disons à chacun grand
merci.
INTRODUCTION
1. Problématique
Depuis la genèse, l'homme a toujours été
condamné à suer, c'est - à - dire travailler durement,
pour avoir son pain quotidien. Conscient de sa condition, il s'est
décidé de se faire aider dans son labeur tout en gardant une
position centrale de toute activité. Ce souci a vite engendré
trois autres qui sont :
· La croissance de la productivité ;
· L'optimisation des procédés de fabrication
; et
· L'amélioration de la qualité des produits
finis.
Il a donc inventé des machines, appelées
robots, qu'il peut néanmoins contrôler
et commander. Les robots sont maintenant présents presque partout dans
les usines ainsi que dans notre vie de tous les jours et ils sont
indiscutablement les nouveaux partenaires de l'homme.
Le contrôle et la commande nécessitent une bonne
connaissance du système qui, d'ailleurs, n'est toujours pas très
évidente. Une tâche importante de l'ingénieur est donc la
réalisation d'un modèle censé réunir, dans un
environnement choisi, un certain nombre de données
représentatives de la réaliser, afin de résumer, sous
forme condensée aisément manipulable, les aspects essentiels du
système étudié. C'est la modélisation.
Deux raisons importantes, qu'il convient de relever, motivent
celle-ci:
· Prédire le comportement du système pour
différentes conditions de fonctionnement : analyse de son comportement
devant des actions possibles ou non et en tirer des informations significatives
utiles tant au chercheur pour la conception et l'amélioration du
système, qu'à l'exploitant pour la bonne conduite du
système ;
· Elaborer une loi de commande à appliquer au
processus pour qu'il réalise « au mieux » l'objectif
assigné.
En ingénierie, la simulation
est un moyen efficace et économique couramment utilisé pour faire
des études préliminaires et / ou comparatives, tant au stade du
développement (conception) qu'au cours du fonctionnement normal du
système. Elle consiste à déduire le comportement d'un
système sur base d'un modèle mathématique correspondant et
remplit toutes les fonctions d'un laboratoire didactique virtuel. L'outil se
prêtant le mieux est l'ordinateur. La simulation sur ordinateur exigera
donc des logiciels. Parmi ceux qui existent,
MATLAB/SIMULINK fait déjà parler de
lui.
De ce fait, le présent travail consistera à
modéliser la cinématique et la dynamique et élaborer un
programme de simulation d'un robot mobile sur roues avec le logiciel
MATLAB/SIMULINK en utilisant divers degrés de
complexité.
2. Subdivision du travail
Pour bien répondre à ses objectifs, notre travail
aura cinq chapitres, hormis l'introduction et la conclusion :
· Dans le premier, nous établirons le modèle
cinématique du robot dans sa plus simple expression ;
· Dans le second, nous établirons son modèle
dynamique dans sa forme la plus simple ;
· Ensuite les diverses améliorations (voir plus
loin) seront introduites ;
· Dans le quatrième chapitre, nous décrirons
l'architecture du programme de simulation ;
· Finalement, il s'agira de valider le code et
interpréter les résultats.
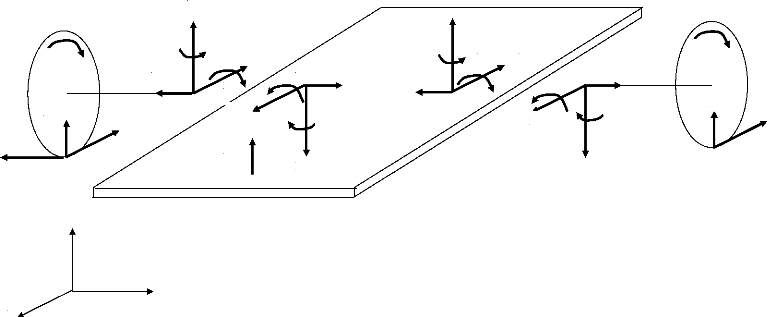
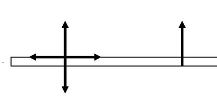
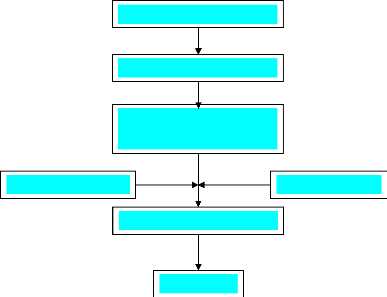
PRESENTATION DU PROBLEME
Le robot est constitué de deux roues motrices (1 et 3)
actionnées indépendamment par deux moteurs à courant
continu (M1 et M3) solidaires au châssis (2) du robot. Le
troisième point d'appui est constitué d'une bille libre (B) qui
n'est pas motorisée (Figure 1). Le robot se déplace sur un plan
incliné d'un angle â par rapport à
l'horizontale.

y1
y
O
z1
G1
x
M3
M1
G
G1
1
z
G3
B
3
z
y
O
y
l13
x1
x
Figure 1 : Projections orthogonales du
robot
Par ce projet, on devra arriver à prédire la
position, la vitesse et l'accélération du centre de masse du
robot (sorties) à partir des valeurs de couples fournis par les moteurs
ou à partir des courants appliqués à ceux-ci
(entrées).
Nous partirons d'un modèle simple sans frottement,
roulant sans glisser sur un sol plat. Ensuite, différentes
améliorations seront prises en compte. C'est notamment ;
· La prise en compte de l'inclinaison â ;
· La prise en compte du frottement dans les
différentes liaisons du robot (roues - châssis, roues-sol) ;
· La prise en compte de la dynamique des moteurs à
courant continu ;
· La prise en compte de la limite d'adhérence des
roues (roulement avec glissement sur le sol).
Nous considérerons que le robot est parfaitement
symétrique (les axes des roues coïncident aussi parfaitement) et
que les roues sont infiniment fines (existence d'un seul point de contact avec
le sol).
Pour établir les équations de mouvement, deux
méthodes équivalentes seront utilisées pour être
comparées. Il s'agit de la méthode analytique ou méthode
de LAGRANGE et celle des théorèmes
généraux ou méthode synthétique. Une d'elle sera
implémentée dans MATLAB pour la
résolution et il faudra choisir l'outil de résolution
numérique entre SIMULINK et les solveurs
ODE (Ordinary Differential Equation).
Les chiffres entre crochets renvoient à la
bibliographie.
Chapitre 1 : MODELE CINEMATIQUE
Ce modèle aura pour entrées, les angles de
rotation theta1 et theta3 ( è1 et
è3 ) des roues, et
? ? ?
pour sorties, la position rG , la vitesse vG ,
l'accélération aG et l'orientation alpha du
robot.
1. Terminologie
Symboles
|
Désignation
|
|
|
l13
|
distance entre roues
|
R
|
rayon des roues
|
G1
|
centre de roue 1
|
G2
|
centre de masse du châssis
|
G3
|
centre de roue 3
|
A
|
point médian entre roues, appartenant au
châssis
|
G
|
centre de masse du robot
|
I1
|
point de contact de la roue1 avec le sol
|
I3
|
point de contact de la roue3 avec le sol
|
? ? ? ?
= 1 . 1 + 1 . 1 + 1 . 1
rG rG x x rG y y rG z z
1
|
Vecteur position de la roue 1
|
? ? ? ?
rG rG x x rG y y rG z z
2 = 2 . 1 + 2 . 1 + 2 . 1
|
Vecteur position du châssis
|
? ? ? ?
rG rG x x rG y y rG z z
3 = 3 . 1 + 3 . 1 + 3 . 1
|
Vecteur position de la roue 3
|
? ? ? ?
= 1 . 1 + 1 . 1 + 1 . 1
vG vG x x vG y y vG z z
1
|
Vecteur vitesse de G1
|
? ? ? ?
= 2 . 1 + 2 . 1 + 2 . 1
vG vG x x vG y y vG z z
2
|
Vecteur vitesse de G2
|
? ? ? ?
= 3 . 1 + 3 . 1 + 3 . 1
vG vG x x vG y y vG z z
3
|
Vecteur vitesse de G3
|
? ? ?
ù1 , ù2
et ù3
|
Vitesses angulaires respectivement de la roue 1,
du
châssis et de la roue 3 dans la base d'étude.
|
? ? ? ?
= 1 . 1 + 1 . 1 + 1 . 1
aG a G x x aG y y aG z z
1
|
Vecteur accélération de G1
|
|
? ? ? ?
= 2 . 1 + 2 . 1 + 2 . 1
aG aG x x aG y y aG z z
2
|
Vecteur accélération de G2
|
? ? ? ?
= 3 . 1 + 3 . 1 + 3 . 1
aG aG x x aG y y aG z z
3
|
Vecteur accélération de G3
|
|
Tableau 1 : Terminologie du modèle
cinématique
2. Description des différents mouvements
? ? ?
La base d'étude est la base (x, y, z) ayant
1x , 1y et 1z comme vecteurs de
base. Cette base est liée au sol. Nous la
considérerons donc comme galiléen à condition
de
substituer à la force de gravitation la notion de poids et
d'exclure les mouvements très précis (la
? ?
déviation vers l'est) ou très rapides. [2.4]. Au
robot est lié la base (x1, y1 et z1) ayant 1x1 ,
1y1 et
?
1 z1 comme vecteurs de base. La relation entre les deux
bases est définie par les expressions :
? ? ?
1 x 1 = cosá .1
x+siná.1 y (1)
? ? ?
1 y 1 = - siná .1
x+cosá.1 y (2)
? ?
1 z 1 = 1z (3)
Les différents mouvements sont :
· Roue 1 par rapport au châssis : rotation d'angle
theta1 autour de l'axe y1 (figure 1).
· Roue 3 par rapport au châssis : rotation d'angle
theta3 autour de l'axe y1.
· Châssis par rapport au référentiel
d'étude : mouvement quelconque dans le plan xoy c.à.d. rotation
d'angle alpha autour de l'axe z et translation suivant les axes x et y.
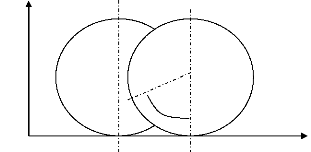
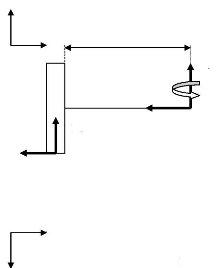
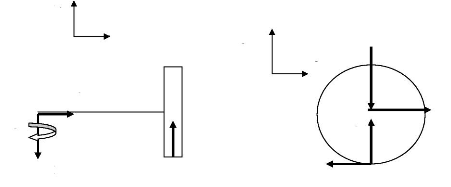
3. Etablissement du modèle
cinématique Pour un roulement sans glissement, on a :
(figure 2)
? ?
vG 1 = R.è& 1
. 1 x 1 (4)
x
z
G1
è
dè
G1'
Figure 2 : Déplacement infinitésimal
d'une roue
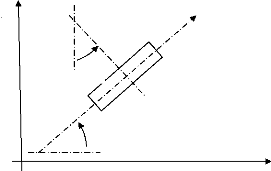
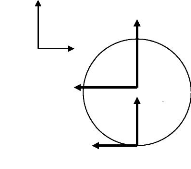
Dans la base fixe, la vitesse de G1 sera donnée par :
(figure 3)
? ? ?
vG = R è&
1 . 1 .(cos . 1 sin . 1 )
á x + á y (5)
De même, pour la roue 3 :
? ? ?
vG = R è&
3 . 3 .(cos . 1 sin . 1 )
y
á
G1
á
x
?
vG1
á x + á y (6)
Figure 3 : Roue1 suivant une orientation
á
?
Vu la non-linéarité du problème
(á est variable avec le temps), la position rG du
robot sera trouvée par intégration numérique.
? ?
rG ? vG dt
1 = 1 (7)
Et :
? ?
rG ? vG dt
3 = 3 (8)
Pour un solide indéformable, la connaissance du
mouvement d'un point quelconque suffit pour décrire complètement
le comportement cinématique de tout le solide. [2.3]. Donc le mouvement
du point médian A est identique à celui du centre de masse G2 du
châssis et à celui du centre de masse G de tout le robot.
De (7) et (8), on a :
? ?
? rG rG
1 + 3
rG = (9)
2
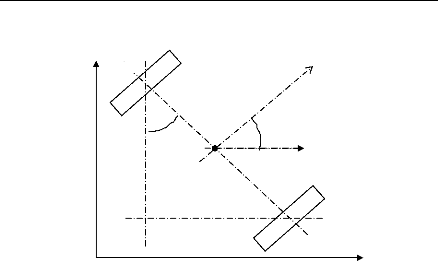
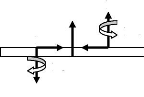
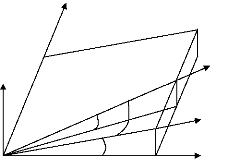
L'orientation du robot sera donnée par : (figure 4)

(10)
rG x
1
- rG x
3
y
rG y rG
-
3 1
DG1
=

DG3
? rG x rG x
- ?
1 3
á arctan
= ? ? (11)
? rG y rG y
-
3 1 ?
Modélisation et simulation d'un robot mobile
sur roues avec le logiciel - 9 -
MATLAB/SIMULINK
G3
x1
y
á
á
A
G1
D
x
Figure 4 : Robot suivant une orientation
á
La vitesse et l'accélération du robot seront :
? R ? ?
vG = ( è & è
&
+ ).(cos . 1 sin . 1 )
á x + á y (12)
2 1 3
?
dvG
dt
(13)
?
aG
Chapitre 2 : MODELE DYNAMIQUE
Ce modèle aura pour entrées, les couples C1et C3
appliqués aux roues, et pour sorties les angles de rotation
è1 et è3 des roues.
1.Terminologie
Symboles
|
Désignation
|
|
|
Ec1, Ec2 et Ec3
|
Respectivement énergie cinétique de la roue 1,
du châssis avec ses
sous-ensembles (moteurs et bille) et de la roue
3
|
EcR=Ec1+Ec2+Ec3
|
Energie cinétique totale du robot
|
I1 , I2 et
I3
|
Respectivement tenseur central d'inertie de la roue 1, du
châssis et de
la roue 3
|
Ep1, Ep2 et Ep3
|
Respectivement énergie potentielle de la roue 1, du
châssis et de la
roue 3
|
EpR=Ep1+Ep2+Ep3
|
Energie potentielle totale du robot
|
Q1 et Q3
|
Respectivement force généralisée
appliquée à la roue 1 et à la roue 3
|
? MC
|
Moment cinétique
|
?
Mext
|
Moment des forces extérieures
|
g=9,81
|
Accélération de la pesanteur
|
|
Tableau 2 : Terminologie du modèle dynamique
2 .Méthode de LAGRANGE
2.1. Expression de l'énergie cinétique
Par le théorème de KOENIG relatif à
l'énergie cinétique, on a :
Ec1 = Energie cinétique de la roue dans son
référentiel barycentrique
|
+
|
Energie cinétique de son centre de
masse dans le
référentiel lié au sol
|
|
Ceci conduit alors à l'expression :
2

1 ? 1? ?
Ec = m vG + 1 1 1
ù I ù
. . (14)
1 1 1
2 2
Avec :
? & ? ?
ù 1 = è 1 . 1 y
1 + á & . 1 z 1 (15)
0
0
2
m 1 R
|
?
?
? ? ? ? ?? ?
|
(16)
|
4
|
|
?
?
I= 1 ? ?
??
?
0 0
Et


2
R
0
m 1
4
2
m R
1
0
2
dans les axes principaux d'inertie de la roue 1.
2
1
1 = m R è & + á &
. 2 2
Ec (6 ) (17)
1
8
De même :
2
3
3 = m R è & + á &
. 2 2
Ec (6 ) (18)
3
8
Le robot étant considéré parfaite ment
symétrique :
m1=m3=m (19)
et posons :
m2=M (20).
(17) et (18) deviennent :
2
Ec 1 = m R è & +
á &
. 2 2
(6 ) (21)
1
8
2
Ec 3 = m R è & +
á &
. 2 2
(6 ) (22)
3
8
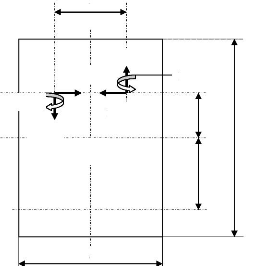
Pour le châssis, le théorème de KOENIG
donne :
2

? ? ?
1 M vG 1
Ec = + 2 2 2
ù ' ù
. . (23)
2 2
2 2
Avec :
? ?
ù 2 = á & . 1 z 1
(24)
?
' = ?
2 12 ?
?
0 0
b
2 + c 2
M ?
d b
2 2
0 + 0 ? (25)
c d
2 2
+
0 0
Et
dans les axes principaux d'inertie du châssis. (Figure
6)
MR 2 M
2 2 2 2
Ec = è & è &
( + ( ). (26)
2 1 3 ) + c d á &
+
8 24
Et finalement, on a :
2 2 2 2
) MR 2
(27)
(6 m M R
+ mR M c d
? ( + ) ?
2 2 2
= ( è è
& &
EcR + ) è è
& &
+
1 3 1 3
. + + á &
8 4 ?? 4 24 ??
2.2. Expression de l'énergie potentielle
Comme le robot se déplace sur un sol plat, son
énergie potentielle sera nulle :
EpR=0
2.3. Expression du lagrangien Le lagrangien L
aura pour expression :
2 2 2 2
+ ) MR 2
(6 m M R ? mR M c d
( + ) ?
2 2 2
L = EcR = ( è
è
& + & ) + è è
& &
1 3 1 3
. + + á &
8 4 ?? 4 24 ??
|
(28)
|
|
2.4. Expression des forces
généralisées
Q1=C1 (29) et Q3=C3 (30)
2.5. Expression des équations de LAGRANGE
d
2.5.1. Equation relative à
è1
? L ? L

( ) - = Q (31)
1
dt
? è& ? è
1 1
2.5.2. Equation relative à
è3

d ? L ? L
( ) - = Q
dt ? è& ?
è
(32)
3
3 3
Il nous sera difficile de développer analytiquement les
équations (31) et (32) à cause de leur
non-linéarité.
3. Méthode des théorèmes
généraux
Il est intéressant d'appliquer ces
théorèmes à la fois dans le référentiel fixe
(absolu) et dans le référentiel mobile lié au
châssis pour comparer les résultats. Mais, par soucis de
simplification, nous ne travaillerons que dans le référentiel
mobile. Les résultats du référentiel fixe seront repris
dans les annexes (Annexes 2).
R15
z1
y1
x1
R6
è2
R16
R11
R8
R13
R9
è1
R4
R10
R7
R5
R7
R12
R12
R3
R4
R10
R13
R8
R9
R1
R11
R14
R6
R5
R2
3.1. Diagrammes des corps rendus libres
Roue 1
z1
x1
R4
y1
y1
R2
r
R6
R8
R5
R3
z1
R6
x1
R4
R3
R1
R1
R2

R5
Figure 6 : Projections orthogonales de la roue 1
rendue libre
R14
R11
R5
R10
R8
R6
R13
R14
R11
R9
b
R4
R6
f
R9
R12
R5
R7
e
R10
R4
O2
d
l
c
Châssis
R12

R10
R9
X3

R15
Roue 3
z3
y3
Z3
R11
X3
R16
R15
R11
R13
R10
R9
R15
Y3

MR
& & & &
(39)

2
(è 1 +è3)
=
R R
-
4 9
3.2. Théorème de la résultante
cinétique
3.2.1 Roue 1
Ce théorème, appliqué à la roue 1,
donne :
? ? ? ?
d?
m . vG mg z R R x R R y R R z
= - . 1 (
- + - + + +
1 1 1 4 ) . 1 (
1 2 5 ) . 1 (
1 3 6 ) . 1 (33)
1
dt
De l'expression (4):
d ? ? d ? ? ?
è & & + . . 1
è & x R x R

dt
è & & + . . . 1
& & y (34)
è á
vG R x R
= . . 1
= . . 1
1 1 1 1 1 1 1 1 1
dt
Comme nous dérivons dans un référentiel
mobile, nous pouvons aussi faire usage du vecteur de DARBOUX pour
arriver au même résultat (Voir plus loin).
Soit, en le projetant sur différents axes:
mR è& & 1 = - (
R1+R4) (35)
mR .è & 1 .á &
= - (R2 +R5) (36)
R 3 + R6 =
m.g (37)
3.2.2 Châssis
Appliqué au châssis, il donne :
? ? ? ? ?
d
m . vG Mg z R R x R R y R R R z
= - . 1 (
+ - + - + + -
2 1 4 9 ) . 1 (
1 5 10 ) . 1 (
1 11 14 6 ) . 1 (38)
1
dt
Soit, en le projetant sur les axes :
MR
2
.
|
d
dt
|
?
MCG
|
1
|
=
|
d
dt
|
?
MCG1
rel
|
? ?
+ ù 1 ? MC
Darb 1 (48)
G
|
|
(è&1 + è
& á & = - (40)
3 ). R R
5 10
R 14 + R 11 - R 6 = M
. g (41)
3.2.3 Roue 3
Appliqué à la roue 3, il donne :
? ? ? ?
d?
m . vG mg z R R x R y R R z
= - . 1 (
+ - + + -
3 1 9 15 ) . 1 1 10 . 1 (
1 16 11 ) . 1 (42)
1
dt
Soit, en le projetant sur différents axes:
mR è& & 3 = R 9 - R
15 (43)
mR . è & 3. &
á= R 10 (44)
R 16 - R 11 = m . g (45)
3.3 Théorème du moment cinétique
3.3.1 Roue 1
Le moment cinétique de la roue 1 en son centre de masse
est donné par :

? ?
MCG 1 = I1 .ù 1
(46)
Soit :
? mR
2
? ?
MCG = (2 . 1
è & y + z
á & . 1 ) (47)
1 1 1 1
4
La dérivée, dans la base mobile, de l'expression
(47) sera :
?
ùDarb 1 est le vecteur de Darboux et vaut :
? ?
ù Darb 1 = á & . 1 z
1 (49)
d
? mR
2
? ? ?
. MC = ( 2 . . 1 2 . 1
- & áè & x á
& & . 1 ) (50)
1 1 1 + y
è & & 1 1 + z
dt
G 1
4
Le moment des forces extérieures dans la base (x1,
y1, z1) est :
? ? ? ? ? ? ? ? ? ? ? ?
Mext R z R x R y R z r y R x R y R z R x C y R z
= - 1 ( 1 - 1 1 ) 1 ( 1 1 1 ) 1 1 1 )
1 1 × - 1 1 2 1 + +
3 1 1 × - 4 1 - 5 1 + -
6 1 7 1 + (51)
1 1 + 8 1
Soit :
? ? ? ?
Mext R r R R R x R R C y R r R z
= ( . - - + + + + (52)
1 6 2 . ) . 1 ( . ) . 1 ( . ) . 1
7 1 1 1 1 4 8 1
Partant des expressions (50) et (52), le théorème
du moment cinétique, projeté sur différents axes,
s'écrit :
mR 2
2
è & á & =
1 . R r R R R
- (53)
6 . - 2 . 7
mR 2
2
mR 2
è& & = R R C
+ (54)
1 1 . 1
á& & = +
R R r
. (55)
8 4
4
3.3.2. Chassis
Le moment cinétique du châssis en son centre de
masse est donné par :

? ?
MCG 2 = I2
.ù2 (56)
Avec :
? ?
ù 2 = á&. 1 z 1
(57)
Soit :
2 2
? M c d
( + ) ?
MCG = á& (58)
. 1 z
2 1
12
La dérivée, dans la base mobile, de l'expression
(58) sera :
.
|
d
dt
|
?
MC G
|
2
|
=
|
d
dt
|
?
MCG2
rel
|
? ?
+ ù 2 ? MC
Darb 2 (59)
G
|
|
?
ùDarb 2 est le vecteur de Darboux relatif au
châssis et vaut :
? ?
2 2
d ? +
M c d
( ) ?
ùDarb 2 = á&. 1
z1 (60)
. MC
= á&& (61)
. 1 z
dt
G 2 1
12
Le moment des forces extérieures dans la base (X1,
y1, z1) est :
?
Mext
|
? ?
? - e ?
? ?
f
= ? - ?
2 ? 2 ?
? ?
b
? ?
? 2 ?
|
(
|
x1 , y 1 , z1 )
|
|
(
?

?
?
? [ ?

R4 l 0

? R5 + 0 A 0 + A - RH
R6
? ?( x1 , y 1 , z 1
)-b R 14
?(x1 , y 1 , z 1
)f2b e
(
2
?
x1 , y 1 , z1 )








R 11

R9
? ?
? R R
-
7 12 ?

(62)
+ 0
? ?
? ? R R
- ?
1 , y1 , z1 )
x y z
1 , 1 , 1 ) 13 8 (
? x
Ou bien :

(
2
?
x1 , y 1 , z1 )
( +R11).
6
b
(R 10 - R5). 2 + R7 -
f+ 2
R12 ?
R
2 = I (R 4 - R9 ).
b +(R 11 , R6 ).
e-R14
2

.l (63)
Mext
( )e + (R 4 +R9).
R 13 - R8
x1 , y 1 , z1 )
f+ 2
(
R 10 R5
Partant des expressions (61) et (63), le théorème
du moment cinétique, projeté sur différents axes,
s'écrit :
(R 6 + R11 )+b
(R10 - R 5 ) + R 7 -
R12 = 0 (64)
2 2
b (R4 - R9 )
+ e.( R 11 - R6 )- l. R
14 = 0 (65)

2
(66)
2 d2 \
M ( c +
)á&& = 2
f
12 (R 4 + R 9) +
e. (R 10 - R 5) + R 13 -
R8
3.3.3. Roue 3
Comme pour la roue 1, on aura :

? ?
MCG 3 = I 3 .ù 3
(67)
Soit :
? mR
2
? ?
MCG = (2 . 1
è & y + z
á & . 1 ) (68)
3 3 1 1
4
La dérivée, dans la base mobile, de l'expression
(68) sera :
a
? mR
2
?
? ?
. MC = ( 2 . . 1 2 . 1

- á & è & x á
& & . 1 ) (69)
3 3 1 + y
è & & 3 1 + z
at
G 1
4
Le moment des forces extérieures dans la base (x1,
y1, z1) est :
? ? ? ? ? ? ? ? ? ? ?
1 ( 1
1 ) 1 ( 1
1 ) 1 1
Mext = - R z R x R z r y R x R y R z R x C y R
z
1 11 1
1
× - + - × + - - + -
3 1 15 1 16 1
1 9 1 10 1
12 1 3 1 13 1
(70)
Soit :
? ? ? ?
Mext R r R x R R C y R r R z
= ( . ) . 1 ( . ) . 1 ( . ) . 1
+ + + + - (71)
3 11 12 1 15 3 1 9 13 1
Partant des expressions (69) et (71), le théorème
du moment cinétique, projeté sur différents axes,
s'écrit :

2
mR
2
2
mR
2
2
mR
è & á & = R r
R
+ (72)
3 . 11 . 12
è& & = R R C
+ (73)
3 15 . 3
á& & = R r R
4
- (74)
9 . 13
3.4. Système d'équations à
résoudre
Les équations (35), (36), (37), (39), (40), (41),
(43), (44), (45), (53), (54), (55), (64), (65), (66), (72), (73) et (74)
constituent le système de 18 équations différentielles
à 18 inconnues à résoudre avec MATLAB.
Les simplifications et substitutions conduisent au
système suivant : De l'équation (54), on trouve :
2 . 2
R R + C
1 1
è& & = 1 (75)
.
m R 2
De (73), on a :
.
i=2 /65 +2C3 (76)
m R 2
(76) dans (35), on tire :
R1 = R4. R +2
C1 (77)
3R
De (36), on tire :
R2 = 2m+M (-R10
-m.R . di. et) (78)
M
De (37), on a :
R 3 = m. g -
R6 (79)
De (65), on tire :
R =
4 [ ( 6
2 e R R l R R
- +
11 ) . 14 ] 9
+ (80)
b
(44) et (36) dans (40), avec (78), on a :
M
R 5 = R10-
2 m+MR2 (81)
(75), (76) et (80) dans (39) donne :
R6= b .m (R1
+R15) - l R14-R11 (82)
e
(2 m+M).e
(53), avec (36), donne :
R 7 = r . R6 +
mR2 uA1 xi R.
R2 = 2r.R 6
3R.R2 R.R5 (83)
2 2
2
mR
R = á&& - (84)
r R
.
8 4
4
De (66), on a:
M c d
2 2
2 (
? + ) ?
R = á&& + e R R R R
.( - + -
9 5 10 ) R (85)
8 13 4
?? -
f ?? 12
De (64), on a :
2 ? -
b ?
R = ( 5
R R R R R
10 ) 12
+ - - (86)
11 7 6
f ?? 2 ??
De (72), avec (44), on tire :
(87)
mR 2 R R
. + 2 .
r R
10 11
R = - è & á &
-
. r R
. = -
12 3 11
2 2
(74) devient :
2
mR
R = r R -
. á&& (88)
13 9 4
(65) devient :
R14 = R6-R11+Mg (89)
(76) dans (73), on tire :
R R C
. 9 2 3
-
3
(90)
R15
R
(45) devient :
R16 = m. g +R11
(91)
4. Comparaison entre les deux méthodes
Il est vrai que le formalisme de lagrangien est
intéressant pour les systèmes à plusieurs poins libres ou
liés [1.3], car par la méthode des théorèmes
généraux il faut écrire n équations
à n inconnues (18 pour notre cas). Mais ici, la puissance du
formalisme est réduite sensiblement car la résolution de
l'équation fournie demande d'abord l'évaluation du lagrangien
donné par l'expression (28) et ensuite le calcul de ses
variations par rapport à è1 ,
è&1 , è3
et è&3 .
Encore, le formalisme est inutilisable en présence des
frottements. Ceci dit, dans la suite du projet, nous ne travaillerons plus
qu'avec la méthode des théorèmes
généraux.
Chapitre 3 : AMELIORATIONS
1. Prise en compte de la dynamique des moteurs
Les moteurs à courant continu sont
caractérisés par leur type d'excitation. Dans les variateurs de
vitesse, on trouve essentiellement ceux à excitation indépendante
ou série. [1.8]
Le bilan des puissances montre que :
Cem = Cu + Cpertes (92)
Or Cpertes est faible et comme le rendement a une
expression complexe, il est plus commode de raisonner sur le couple
électromagnétique et c'est ce que l'on fait toujours. [2.2]
Il y'a deux manières d'exprimer la dynamique des moteurs
à courant continu, selon qu'on a pour paramètres de couple :
-la tension appliquée u, le
courant d'induit ia et la résistance d'induit
ra :
C ( - . ) .
u ra ia ia
= (93)
è&
-le courant d'induit et le flux par pôleö
:
C=K. ia.ö (94)
K est une constante du moteur, qui dépend du
nombre de paires de pôles p, du nombre de brins actifs
n et du nombre de paires de voies d'enroulements a, et vaut
:
p n
.
K 2 . .
ð a
= (95)
Des modèles (93) et (94), nous retiendrons le dernier
parce qu'il ne fait pas intervenirè& , qui est
une sortie du modèle dynamique.
Dans l'expression (94), on voit qu'il y'a deux moyen de faire
varier le couple :
· Par variation du flux ö , donc du courant
d'excitation ;
· Par modification du courant d'armatureia .
Ici, nous ne considérerons que la variation par
modification de ia à cause des inconvénients suivants de
la variation de flux : [1.8]
· Saturation du fer ne permettant pas d'atteindre des
valeurs de flux aussiélevées que l'on désire
(réglage de vitesse dans des rapports 1 à 4
seulement alors que par modification de ia on a des
gammes de vitesses allant jusqu'à des rapports de 1 à 200, et ce,
dans des laps de temps très courts) ;
· Importance de l'inductance du circuit d'excitation
conduisant à une constante de temps relativement grande et
empêchant des variations rapides du courant d'excitation ;
· ie p ia et peut, de fois, conduire au
désamorçage des thyristors du variateur de vitesse (ie
plus petit que le courant de maintient).
2. Prise en compte du frottement dans les liaisons du
robot
Le couple de frottement est donné par la relation :
Cf = N. re . fa (96)
[1.7]
Où re est le diamètre des essieux et
fa, le coefficient de frottement entre les essieux et les moteurs (Ce
frottement sera considéré sec) et N la réaction normale de
la liaison châssis - roue (résultante de R6 et R4, et celle de
R11 et R9).
Pour ce projet, nous prendrons fa compris entre 0.05 et
0.1. [1.7]
La présence du frottement dans les liaisons du robot
se manifestera par une réduction du couple moteur. Comme le frottement
dans les articulations du robot n'a pour effet que de réduire le couple
moteur appliqué à la roue, la seule modification à faire
sera donc la considération d'un couple réduit Cred tel
que :
Cred 1 = C1 - Cf
Quatre expressions seulement vont changer, toutes les autres
seront maintenues.

R R + C - re fa R + R
2 . 2 . ( . . )
1 1 6 4
2 2
è& & = (97)
1 m R 2
.
2
2 R + C - re fa R + R
2
2 . ( . .
15 3 11 9

)
è& & = (98)
3 m R 2
.
R R
. 2 . (
+ C re fa
- . .
4 1
R 1 3 R
|
|
|
|
|
)
(100)
|
R 15
|
R R
. 9
|
- 2. ( C re fa
- . .
3
|
|
|
3 R
|
|
|
|
3. Prise en compte de l'inclinaison â du plan
d'appui du robot par rapport au sol (horizontal)
Si le plan d'appui est incliné d'un angle â
par rapport à l'horizontal, le robot ne sera pas toujours sur la
plus grande pente (pente apparente), mais plutôt sur une pente ?
(pente réelle) telle que représentée sur la figure 8
et donnée par :
y2=y
x1
z2
x
á
?
â
â
x2
Figure 9 : Différents axes relatifs au plan
incliné
L'amélioration ici sera le fait que le poids de chaque
corps ne sera plus suivant l'axe des z, mais plutôt suivant l'axe z2 de
la base (x2 ,y2, z2) telle que :
? ? ? ? ? ?
1 x = cos . 1 sin . 1 cos . cos . 1 cos . sin . 1 sin .
1
â x - â z = â á x
- â á y - â z (101)
2 1 1 1
? ? ? ?
1 1 2 sin . 1 1 cos . 1 1
y y
= = á x + á y (102)
? ? ? ? ? ?
1 z = sin . 1 cos . 1 sin . cos . 1 sin . sin . 1 cos .
1
â x + â z = â á x
- â á y + â z (103)
2 1 1 1
3.1. Théorème de la résultante
cinétique
3.1.1. Roue 1
Ce théorème, appliqué à la roue 1,
donne :
? ? ? ?
d?
m . vG mg z R R x R R y R R z
= - . 1 (
- + - + + +
1 2 1 4 ) . 1 (
1 2 5 ) . 1 (
1 3 6 ) . 1 (104)
1
dt
Soit :
d
? ? ? ? ? ? ?
(105)
m . vG mg
= - .(sin . cos . 1 sin . sin . 1 cos . 1 ) (
â á x - â á y +
â z - +
R R x R R y R R z
- + + +
1 1 1 1 1 4 ) . 1 (
1 2 5 ) . 1 (
1 3 6 ) . 1 1
dt
Ou bien :
mR è&& = - ( . . sin . cos
m g â á + +
R R ) (106)
1 1 4
mR . .
è & á & = m
g
. . sin . sin (
â á - R R
+ ) (107)
1 2 5
R 3 + R6
=m.g . cos â (108)
3.1.2. Chassis 2
Appliqué au châssis, il donne :
? ? ? ?
d?
m . vG Mg z R R x R R y R R R z
= - . 1 (
+ - + - + + -
2 2 4 9 ) . 1 (
1 5 10 ) . 1 (
1 11 14 6 ) . 1 (109)
1
dt
Ou bien :
? ? ? ? ? ?
d ?
1 (110)
m . vG Mg
= - .(sin . cos . 1 sin . sin . 1 cos . 1 ) (
â á x - â á y +
â z + R R x R R y R R R z
- + + + + -
2 1 1 1 4 9 ) . 1 (
1 5 10 ) . 1 (
1 11 14 6 ) . 1
dt
MR

Soit, en le projetant sur les axes :
& & & &
2 1
MR

2
( è è
+ 3 R 4 R 9 M
g
) = - - . . sin . cos
â á (111)
(è & 1 + è &
á & =
3 ). M g
. . sin . sin
â á + -
R R (112)
5 10
R 14 + R11 -
R6 =M.g . cos â (113)
3.1.3. Roue 3
Appliqué à la roue 3, il donne :
d
? ? ? ? ? ? ?
(114)
m . vG mg
= - .(sin . cos . 1 sin . sin . 1 cos . 1 ) (
â á x - â á y +
â z + R R x R y R R z
- + + -
3 1 1 1 9 15 ) . 1 1 10 . 1 (
1 16 11 ) . 1 1
dt
Et sur les différents axes, on a :
mR & & 3 = R 9 - R 15 - m
. g . sin . cos
è â á (115)
mR è & á & = m g
â á + R (116)
. 3 . . . sin . sin 10
R 16 - R11 =m.g .
cos â (117)
3.3. Théorème du moment cinétique
Aucune modification n'est à faire ici car le bras de
levier du poids est nul.
m g
.
|
. . sin . co s
R â á + R R
. 2. (
+ C re fa
- . .
4 1
|
|
R R
2 2
+
6 4
|
)
|
|
R R m g
. - .
9
|
. . sin . cos 2 . (
R â á - C re fa
- . .
3
|
|
R R
2 2
+
11 9
|
)
|
|
3 R
3 R
R 1 =
R 15
(124)
(125)
Après simplifications et substitutions, les expressions
modifiées seront:
2 m M
+
R m g
= . . sin . cos
â á - -
R m R
. . .
è á
& & = ( . . sin . cos
m g â á - m R
. . .
è á
& & - R ) (118)
2 5 1 1 10
M
R 3 = m. g . cos â
-R6 (119)
mR .è & 3 .á& -
m.g . sin â.sin á =
R10 (120)
R 14 = R6 -R11
+M.g . cos â (121) - . . . sin . cos 2
R 15 =
â á - C
. R m g R
3R
R 9 3 (122)
R 16 = m. g . cos â
+R11 (123)
4. Modèle complet
Le modèle complet est celui reprenant toutes les
améliorations. L'utilisateur n'aura donc plus qu'à
considérer les valeurs adéquates de chaque paramètre pour
son cas d'étude. Il est constitué des expressions (80), (81),
(82), (83), (84), (85), (86), (87), (88), (97), (98), (118), (119), (120),
(121), (123), (124) et (125), auxquelles il faut ajouter :
Chapitre 4 : DESCRIPTION DE L'ARCHITECTURE
DU
PROGRAMME
Intervalle d'intégration
Equation différentielle d'ordre n
Changement des variables
Système d'équations
différentielles
d'ordre 1
[Y']=f ([Y])
Intégration du système
Vecteur [Y]
Conditions initiales
1. Généralités
1.1 But du chapitre
Ce chapitre a pour but de décrire et représenter
l'enchaînement des opérations à
effectuer par ordre chronologique dans l'exécution du
programme.
1.2 Résolution numérique d'une
équation différentielle ordinaire d'ordre n Pour résoudre
numériquement une équation différentielle ordinaire, on
suit les
étapes suivantes :
· Changement de variables ;
· Transformation de l'équation en un système
d'équations différentielles d'ordre un ;
· Intégration du système avec un solveur
ode.
En résumé, on a :
1.3. Développement des intégrateurs
numériques utilisés par le logiciel MATLAB
1. Forme canonique d'une EDO (équation
différentielle ordinaire).
Equation : f ( y , t )
dy =
dt
|
(126)
|
|
Condition initiale : y ( t o )
= yo
Solution exacte : y = F (t)
Ou bien = + ?
t
f (y , t )dt
(127)
0
2. Transformation vers une forme canonique
d z
2
n - 1
dz d z
n d z
Soit l'équation : = G z

( , , ,..., 1 , )
t

n dt 2
dt dt dt n -
y 2
1 =
dt
dt
n
n
d
dy
z
=
dt
n
dt
z y
= 1
dz
dy
On posera :
n
-
dy
dt
1 =
y n
1
-
n
d
z
=
1
-
n
dt
(128)
f
( t , y)
Si :
dy
=
dt
y t o= yo
t
(129)
alors, la solution exacte sera : = + ?
y t y o f t y dt
( ) ( , )
0
Pour une solution numérique yj ,
l'erreur commise sera : e j = yj-y( t
j) (130)
3. Méthodes à pas constant
1) Méthode d'EULER ou de la tangente
Soit à résoudre l'équation
différentielle :
Considérons le développement de TAYLOR de
y(t) autour de to, qui s'écrit
:
) (131)
n
y t
' ' ( ) y t
( ) ( )
o n o
y t y t
( ) ( ) ( ) . ' ( ) ( ) .
2
= + -
t t y t + -
t t + + -
( ) .
t t + R t
n (
o o o o o
n
2! !
En se limitant à l'ordre 1 dans ce développement,
on a :
y ( t ) = y(t o
) + ( t - t o ) .y ' ( t
o) (132)
Ou bien :
y n + = y n + h f t
n y n (133)
. ( , )
1
Avec :
h = t n +1 -t n (134)
Les expressions (133) et (134) définissent la
méthode d'EULER. Elle revient à estimer la solution au
voisinage de tn sur la tangente à la fonction f
(t, y). Elle est assez précise pour des pas petits.
2) Méthode de HEUN
C'est une méthode en 4 étapes qui sont :
· Calcul de la fonction f en tj-1 :
k1 = f( t j -1, y j
-1) (135)
· Calcul de yj* par la méthode
de EULER explicite :
y j * = y j - + h.k
(136)
1 1
· Calcul de la pente en (tj , yj *) :
k2 = f(t j , y
j ) (137)
· Calcul final de la solution finale entre k1 et
k2 :
y j y j
= - 1
|
k k
+
1 2
+ h . (138)
2
|
|
3) Méthodes de RUNGE-KUTTA (RK)-ODE 23 et ODE
45
Elles sont une amélioration de la méthode de HEUN
et elles font la moyenne entre m
pentes.
Formule générique :
y j = y+ w1. k
1 + w2 .k 2 + +
wm.k m (139)
Avec :
k1 = f ( t j -1, y j-1)
k 2 = f ( t +
c2.h , y + a21.k1
|
)
|
|
)
k = f t j - + c h y j - + a k
+ a k
( . , . .
3 1 3 1 31 1 32 2
k f t
= ( + c h y
. , + a k a k
. + . ....
+ + a . )
k (140)
m j - 1 m j - 1 m 1 1 m 2 2
m m
( 1 )
- m - 1
L'ordre m de la méthode dépend de l'ordre
du développement de la série de TAYLOR
correspondante.
Les termes wi, ci et ai sont
choisi par identification avec les termes du développement de
TAYLOR à l'ordre m. Pour faire cette
identification, on arrive toujours à un système de n
équations à n+1 inconnues. On doit alors fixer un
paramètre au choix, lequel choix étant fait de manière
à minimiser l'erreur d'intégration.
On voit bien que la méthode de
HEUN est une méthode de RK d'ordre 2 avec
c2=a21=1, w1= w2=1/2.
La méthode de RK d'ordre 4(RK4), s'écrit :
1 1 1 1
y j y j h k k k k
= - +

1 .( 1 + + + ) (141)
2 3 4
6 3 3 6
Avec :
k1 = f ( t j -1 , y j-1)
)
)
k 2 = f( t +h
,y + h .
2 j2
k 3 = f( t +h 2
j2
, y + h k2
km = f( t j -
1+ h,y j - 1+
h.k3 ) (142)
La précision de la méthode dépend de
l'ordre, cependant l'utilisation d'ordres supérieurs n'est pas
très intéressante. Cette précision augmente lorsque le pas
h diminue. [3.3]
4. Méthode à pas variable
C'est une méthode numérique qui ajuste le pas
d'intégration au cours de la résolution. Pour cela, il faut
estimer l'erreur commise à chaque pas d'intégration. Si l'erreur
d'intégration est trop grande, par rapport à un critère
fixé, alors on réduit le pas h. Si l'erreur est petite,
par rapport au même critère, on peut alors se permettre
d'augmenter le pas pour aller plus vite. Deux solutions sont en vue :
· Solution 1 : Calculer une solution à un
point donné avec deux valeurs de h différentes :
o Si le résultat est le même, alors on conserve la
valeur grande de h pour le pas suivant ;
o Si le résultat est différent, on suppose que le
meilleur résultat est obtenu avec la petite valeur de h qu'on conserve
pour le pas suivant.
· Solution 2 : Utiliser deux méthodes en
parallèle avec le même pas h mais avec des ordres
différents.
Cette solution nous conduit aux solveurs ODE
45 et ODE 23 implantés dans
MATLAB :
o ODE 23 : C'est la méthode de
RK-FEHLBERG 23 qui utilise les méthodes de
RK d'ordres 2 et 3 :
On calcule successivement yjavec RK2,
yj* avec RK3 et ?j = yj - yj* (avec un
même pas h) :
Si la valeur de ?j est inférieure à la
tolérance fixée, alors on accepte yj tout en maintenant
h ;
Si la valeur ?j est très petite que la
tolérance fixée, alors on accepte yj et on augmente
h ;
Si la valeur de ?j est supérieure à la
tolérance fixée, alors on recommence avec h plus
petit.
Comme c'est la méthode numérique qui choisit le
pas, on n'a pas la
solution aux temps désirés. Il est alors
nécessaire d'interpoler les résultats.
Cet intégrateur a un bas niveau d'exactitude et est
utilisé pour des problèmes non raides avec tolérances
brutes ou pour résoudre des problèmes modérément
raides.[]
o ODE 45 : Ici les ordres sont 4 et
5. Cet intégrateur est employé la majeur partie du temps et il
est le premier en vue pour tout problème. Il a un niveau moyen
d'exactitude. [3.3], []

Pour ces deux méthodes, le pas d'intégration est
fixé de manière à avoir :
ô -< max(Re lTol *
yj ,AbsTol) (143)
ti étant une estimation de l'erreur locale produite par la
méthode numérique .
La tolérance relative (RelTol) et la tolérance
absolue (AbsTol) sont respectivement 1e-3 et 1e-6 par
défaut.
5. Méthodes à pas liés
Elles consistent à évaluer yj à
partir de plusieures valeurs yj-1, yj-2,....yj-k
:
tj

k
-
tj
Avec ces méthodes, f(t,y) sera
évalué avec un polynôme d'interpolation. 1)
Méthode ouverte
On utilise les k+1 dernières valeurs de
f pour construire un polynôme de degrés
k(fn, fn- 1, fn-2,..., fn-k+1), lequel sera utilisé
pour déduire la valeur de la fonction f en n+1 (une
extrapolation). C'est la méthode d'ADAMS - BASHFORH (à pas
fixe).
Pour k=1 :
y n + 1 = yn + h.f ( y
n) (145)
Pour k=2 :
y j = yj-k + ? f( t , y ) dt (144)
3 1
2
y n + 1 = y n h . 2
.f( y n ) - .f(
yn-01] (146)
Pour k=3 :
= + ? 23 16 5 ?
y y h f y
. . ( ) - . ( )
f y + . ( )
f y (147)
n + 1 n n n - 1 n - 2
?? 12 12 12 ??
Pour k=4 :
? 55 59 37 9 ?
y = +
y h f y
. . ( ) - . ( )
f y + . ( )
f y - . ( )
f y (148)
n + 1 n n n - 1 n - 2 n -
3
?? 24 24 24 24 ??
2) Méthode fermée
Contrairement à la méthode ouverte, on utilise
cette fois le point qu'on cherche dans la détermination du
polynôme d'interpolation de degré
k+1(fn+1, fn, fn-1, fn-2,...,
fn-k+1). La méthode étant implicite, la résolution
est donc lourde. C'est la méthode d'ADAMS -
MOULTON (à pas fixe).
Pour k=0 :
y n + 1 = yn + h. f
( y n +1) (149)
Pour k=1 :
1 1 ?
y y h f y
+ = + ? + +
. . ( ) . ( )
f y (150)
n 1 n n 1 n
?? 2 2 ??
Pour k=2 :
= + ? 5 8 1 ?
y y h f y
. . ( ) + . ( )
f y - . ( )
f y (151)
n + 1 n n + 1 n n - 1
?? 12 12 12 ??
Pour k=3 :
? 9 19 5 1 ?
y = +
y h f y
. . ( ) + . ( )
f y - . ( )
f y + . ( )
f y (152)
n + 1 n n + 1 n n - 1 n -
2
?? 24 24 24 24 ??
3) Méthode prédicteur - correcteur-ODE
113
Dans cette méthode, on utilise les avantages des
méthodes ouvertes et fermées. Elle s'effectue en trois
étapes :
· Etape 1 : Phase de prédiction :
^
On prédit une valeur 1
y n + de par la méthode ouverte ;
· Etape 2 : Phase d'évaluation :
^ ^
)
f n + = f t n + y n +
( , 1
1 1
· Etape 3 : Phase de correction :
^
On corrige la valeur de 1
y n +
^
.
en utilisant 1
f n +
Amélioration :
par une méthode fermée pour trouver
yn+1
o La phase de correction peut être
répétée plusieurs fois ;
o Usage d'une méthode à pas variable ;
o Usage d'une méthode à ordre du polynôme
d'interpolation variable. Cette méthode a pour inconvénient
majeur quelle n'est pas auto démarrante.
Si l'ordre est 1, la méthode est dite de EULER
modifiée.
y n + prédit = y n +
h f t n y n
1 , . ( , ) (153)
y corrigé y h f t y prédit
, = + . ( , , ) (154)
n + 1 n n + 1 n + 1
Le solveur ODE 113 de MATLAB
utilise la méthode prédicteur - correcteur (méthode
d'ADAMS - BASHFORTH - MOULTON à pas variable
et ordre de polynôme variable entre 1 et 13). Il est utilisé pour
des problèmes non raides avec des tolérances rigoureuses ou pour
résoudre des problèmes intensifs avec une exactitude allant du
niveau bas au haut niveau
A forte précision demandée, le solveur
ODE 113 est plus rapide, tandis qu'à faible
précision, les solveurs ODE 23 et
45 sont plus rapides.
6. Méthodes « stiff »
1) Equation différentielle « stiff
»
Un système d'équations différentielles est
« stiff » ou raide quand les dynamiques qu'il représente sont
à la fois très lentes et très rapides.
1 f y y y t
= 1 ( 1 , 2 ,..., , )
n
dt
dy
2 f y y y t
= 2 ( 1 , 2 ,..., , )
n
f ( y 1 , y 2
,..., y , t )
n n
(155)
dy n
dt
dy
dt
La matrice jacobienne de ce système s'écrira :
. ?
dy n ?
.... ?
?
df n
. ?
dy ? ?
n
df ?
1


(156)
df1

1
dy
df n

1
dy
Pour laquelle on calculera les valeurs propres. Pour cette
méthode, il faut intégrer sur une longueur importante à
cause des dynamiques lentes, avec de petits pas en raison des dynamiques
rapides. C'est une méthode inefficace et de fois infiniment longue.
2) Méthode de GEAR (ou BDF : backward
differentiation formulas)
Par cette méthode, on cherche à interpoler la
fonction y(t) grâce aux valeurs précédentes (
yn+1, yn, yn-1, yn-2, ,yn-k+1) avec un
polynôme d'interpolation noté q(t). Il y' a donc une
contrainte supplémentaire :
q'(tn+1)=f(tn+1)
c'est une méthode à pas d'intégration et
ordre variables.
Pour k=1 :
y n+ 1 = yn + h. f
( y n +1) (157)
Pour k=2 :
3 1
h
f y n + = y n + - y n +
y n - . ( ) 2 (158)
1 1
2 2 1
Pour k=3 :
11 3 1
h f y
. ( ) = y - +
3 y y - y (159)
n + 1 n + 1 n n - 1 n - 2
6 2 3
Pour k=4 :
25 4 1
h f y
. ( ) = y - 4 3
y y
+ - y + y (160)
n + 1 n + 1 n n - 1 n - 2
n - 3
12 3 4
Pour k=5 :
137 10 5 1
h f y
. ( ) = y - +
5 5

y y - y + y - y (161)
n + 1 n + 1 n n - 1 n - 2
n - 3 n - 4
60 3 4 5
Pour k=6 :
147 15 20 15 6 1
h f y
. ( ) = y - 6 y + y - y
+ y - y + y (162)
n + 1 n + 1 n n - 1 n - 2
n - 3 n - 4 n - 5
60 2 3 4 5 6
3) ODE 15s
Ce solveur est une amélioration de la méthode
de GEAR. C'est une méthode à pas variable et ordre
variable entre 1 et 6, avec une exactitude allant du bas niveau à un
niveau moyen. On l'emploi généralement lorsque
l'ODE45 est lent.
4) ODE 23s
Il permet la résolution des problèmes raides, avec
un bas niveau d'exactitude. 4) ODE 23t
Il permet la résolution des problèmes
modérément raides, avec un bas niveau d'exactitude.
5) ODE 23tb
Il permet la résolution des problèmes raides, avec
un bas niveau d'exactitude.
2. Fichier parametresrobot.m
C'est un script dans lequel on affecte des valeurs aux
différents paramètres du robot et aux entrées de la
fonction dynamique_moteurCC. Comme ces entrées doivent varier
dans le temps, la contrainte est qu'il faut qu'elles aient ( + 1 )
tfin valeurs, avec tfin qui est le temps
d'intégration et
h
h le pas d'intégration. Pour saisir
facilement ces entrées, nous allons générer 4 tranches de
di ou di1 valeurs chacune, et ce, partant de leurs bornes et
ensuite faire la concaténation de liste. Ce fichier est repris en annexe
3.
di = entier le plus proche de )
( h
tfin (163)
4 .
tfin
di 1 = -3* di+1 (164)
h
3. Fichier dynamiquemoteurCC.m
Les entrées sont les courants et les sorties, les
couples moteurs. Après la déclaration des variables et
différents paramètres du robot, la fonction parametres_robot
est appelée et les couples sont calculés par la relation
(94) et (95), pour finir par la visualisation de ces couples en fonction du
temps.
Début
Déclaration des variables globales
Calcul de K, C1 et C3

Affichage des résultats
Fin
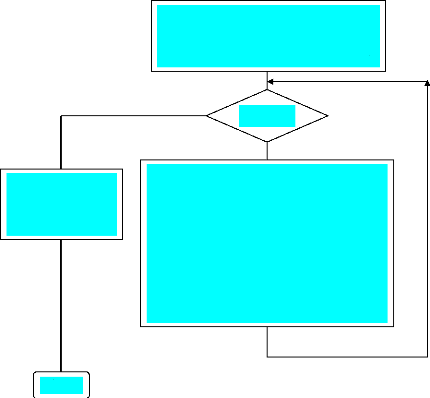
4 Fichier bouclerobot.m
Dans ce script, nous faisons le traitement dynamique et
cinématique du robot. Il s'agit ici de trouver les angles de rotation de
rotation des roues et les différentes réactions connaissant les
couples appliqués aux moteurs, sortis de dynamique_moteurCC
(traitement dynamique) et, des angles de rotation des roues, trouver les
positions, les vitesses, les accélérations et l'orientation du
robot. Nous avons été contraint de faire les deux traitements
dans une même boucle par la non linéarité des
équations (alpha dépend des ces angles). Ses temps forts sont
:
· Déclaration des différents
paramètres globaux ;
· Initialisation de la variable t, faisant office du temps
dans les différents calculs, du compteur i et des conditions initiales
;
· Création des matrices de dimensions
adéquates pour le stockage des différentes sorties ;
· Tant que t=120 secondes, les opérations
suivantes seront exécutées :
o i=i+1 : actualisation du compteur ;
o Affectation de la valeur de C1(i) et C3 (i) aux
couple de calcul C1c, C3c , valeurs à considérer dans
les calculs au temps t ;
o Calcul des valeurs des réactions au temps t par les
relations (80), (81), (82), (83), (84), (85), (86), (87), (88), (118), (119),
(120), (121), (123), (124) et (125);
o Lancement de l'intégration de la dynamique avec le
solveur ODE45 ; o Mémorisation de la valeur actuelle de yd
dans la matrice sorties_d ;
o Mémorisation des valeurs des réactions dans
des matrices respectives ; o Lancement de l'intégration de la
cinématique avec le solveur ODE45 ; o Mémorisation de la
valeur actuelle de yc dans la matrice sorties_c ;
o Calcul de alpha au temps t (alp) et de ses deux
dérivées (dalp et ddalp) ;
o Mémorisation de la valeur actuelle de alp et dalp
dans leurs matrices
respectives ;
o Mémorisation de la valeur actuelle de t dans
la liste temps ;
o fin de la boucle
· Calcul des positions, vitesses et
accélérations du robot ;
Calcul des positions, vitesses et
accélérations du robot.
Fin
i=i+1 ;
affectation des couples de calcul ;
calcul des réactions ;
lancement de l'intégration dynamique ; Mémorisation
de la valeur actuelle de yd dans la matrice sorties_d ;
Lancement de l'intégration cinématique ;
Mémorisation de la valeur actuelle de yc dans la matrice
sorties_c ;
Calcul de alp, dalp et ddalp ;
t=t+h
mémorisation du temps ;
t=0 ;
i=0 ;
conditions initiales ;
création
des matrices sorties_d et sorties_c ;
t=tfin-h
Le script possède 2 fonctions internes dans lesquelles
les équations à intégrer{(5) et (6) pour la
cinématique, (97) et (98) pour la dynamique} ont été
définies. Son ordinogramme est le suivant :
Début
Déclaration des
paramètres du
modèle
Appel des paramètres du robot et des
entrées
du modèle
A l'instant initial, toutes les réactions sont nulles
sauf R3, R6, R7, R11, R12, R14 et R16.Leurs valeurs sont obtenues en traduisant
l'équilibre statique du robot (figures 5, 6, 7 et 8).
Mg l
.
R R mg
3 = = +
16 (165)
2 . ( )
l e
+
Mg l
.
R R
6 = =
11 l e (166)
2 . ( )
+
Mg l r
. .
R R
= = (167)
7 12 2 . ( )
l e
+
Mg e
.
R 14 l
e
= (168)
( )
+
5. Fichier robotmobile.m
Ce modèle a pour entrées les courants ia1 et ia3
et pour sorties les accélérations, les vitesses et les positions
du robot (aG, vG et rG). Il a la structure suivante :
ia1 ia3
Dynamique moteur
CC

C1
C3
Dérivation
Dynamique robot
Cinématique robot
?
aG
á
?
rG
?
vG
L'ordinogramme du modèle est le suivant :
Chapitre 5 : VALIDATION DU CODE ET RESULTATS
1. Choix de la méthode de validation
Pour valider le code, trois moyens sont possibles :
· 1er moyen :
Comparaison entre les résultats obtenus par le code et ceux des
expériences au laboratoire sur modèle physique réel ;
· 2ème moyen :
Comparaison entre les résultats obtenus par le code et ceux d'un
soft
approprié (sorte de laboratoire virtuel, le VISUAL NASTRAN par
exemple) ;
· 3eme moyen : Par
analyse du comportement du robot devant certaines actions
préméditées.
Le troisième moyen sera retenu pour ce projet pour les
raisons suivantes qui disqualifient les deux autres :
> Absence d'un laboratoire de mécanique analytique
à Lubumbashi ; > Méthodes coûteuses (les deux
premières).
Nous partirons donc de quelques actions pour lesquelles on peut
imaginer le comportement du robot. Les actions choisies sont :
> C 1 = C3 = 0 : Le robot reste
stationnaire si â = 0 et se meut inconditionnellement
vers le bas en ligne droite avec une certaine
accélération en l'absence du frottement ou à condition que
le frottement soit vaincu pour â ? 0 ;
> C 1 = C3 ? 0 : Il se meut en ligne droite
quelque soitâ ;
> C 1 = 0 et C3 ? 0 : Il décrit un
cercle de rayon l13 si â = 0 et de rayon plus grand que l13 si
â ? 0 , dans le sens horlogique ;
> C 1 ? 0 et C3 = 0 : Il décrit un
cercle de rayon l13 si â = 0 et de rayon plus grand que l13 si
â ? 0 , dans le sens trigonométrique ;
> C1 supérieur à C3 : Il prend un virage vers
la droite ; > C3 supérieur à C1 : Il prend un virage vers la
gauche.
2.Comportement du robot
2.1. C 1 = C3=0 ; 2.2. C 1 =
C3?0 ;
2.3. C 1 = 0 et C3?0 ; 2.4. C 1 ? 0
et C3=0;
2.5. C1 supérieur a C3 ; 2.6. C3 supérieur a
C1.
3.Conclusions
CONCLUSIONS GENERALES
1. Objectifs accomplis
Dans le présent travail, nous avons
modélisé et simulé la cinématique et la dynamique
d'un robot mobile sur roues se mouvant sur un plan incliné. Par
superposition des lois élémentaire relatives aux mouvements
simples, nous sommes arrivé à un modèle
mathématique dépendant des différents paramètres du
robot (rayon des roues, masse des roues et du châssis, pente du plan
incliné).
Nous sommes parti d'un modèle simple sans frottements
et sur sol horizontal, que nous avons ensuite amélioré
jusqu'à avoir un modèle assez complexe représentant
globalement le robot :
· nous avons introduit la dynamique des moteurs à
courant continu. Il s'agissait d'établir la relation liant les couples
aux signaux électriques ;
· nous avons tenu compte de l'adhérence des roues en
utilisant la loi approximative de COULOMB ;
· nous avons considéré le frottement dans les
liaisons paliers - essieux des roues.
Pour arriver aux équations de mouvement, nous avons
utilisé deux méthodes équivalentes afin de les comparer
:
· la méthode des théorèmes
généraux ; et
· le formalisme lagrangien.
La méthode synthétique ou méthode des
théorèmes généraux a été retenue
parce qu'elle nous a fournit des équations faciles à
intégrer.
Le logiciel MATLAB nous a permis de résoudre les
équations obtenues et de les
simuler.
2. Méthodes de résolution
2.1. Performances
2.2. Limitations
3. Intérêt du projet
Ce projet constitue une fiche technique du robot
étudié. Il servira donc de guide dans son analyse, sa
synthèse et sa conduite. Il est ensuite un exemple de résolution
d'un problème concret de mécanique analytique avec
MATLAB/SIMULINK et il contribuera à accroître le volume
documentaire en mécanique analytique.
4. Validité des résultats
5. Problèmes en suspens
Pour ne pas compliquer le modèle, plusieurs
paramètres ont été mis à l'écart. C'est
notamment :
· Le frottement dans la liaison bille - châssis ;
· Le rendement de la transmission moteur - roue.
Ils peuvent cependant être pris en compte pour
réalise un modèle assez complet. On pourra aussi envisager
d'autres lois de frottement plus complexes (BOWDEN - TABOR, par exemple) mais
plus exactes que celle de COULOMB.
Une comparaison quantitative entre les deux méthodes
d'étude peut être faite. Il faut, pour cela, faire un programme de
résolution des équations obtenues avec la méthode de
LAGRANGE et comparer les résultats obtenus avec ceux relatifs aux
théorèmes généraux.
6. Perspectives
A l'avenir, il faudra aussi penser à résoudre le
problème avec l'interface SIMULINK pour conclure sur l degré
d'exactitude des programmes établis. On pourra aussi changer
d'intégrateur (ODE 15s ou ODE 113) pour s'assurer ou non de
l'amélioration du temps de résolution et de la précision
des calculs.
ANNEXES
Annexes1 : Les différents scripts
Annexes 2 : Théorèmes
généraux appliqués au robot dans la base fixe
1. Théorème de la résultante
cinétique
Roue 1
Ce théorème, appliqué à la roue 1,
avec l'expression (5), donne :
d ? ?
? [ ] ? [ ] ?
m . . (cos . 1 sin . 1 ) (
R è& á x +
á y R R
= + ) sin (
á - + ) cos . 1 (
R R á x R R
- + ) sin (
á + R R
+ ) cos . 1 (
á y R R m g z
+ + - . ) . 1 (169)
1 2 5 1 4 1 4 2 5 3 6
dt
Soit, en le projetant sur différents axes:
m R
. . ( 1 . cos
è & & á è &
á & á
- 1 . . sin ) sin ( 2 5) cos ( 1 4)
= á R R
+ - á R R
+ (170)
m R
. . ( 1 . sin
è & & á è &
á & á
+ 1 . . cos ) sin ( 1 4) cos ( 2 5)
= - á R R
+ - á R R
+ (171)
R 3 + R6=m.g (172)
Châssis
Appliqué au châssis, il donne :
M R
.
2
M R
.
2
. ( . cos
[ è á è á á è
á è á á
& & - & &
. . sin ) ( . cos
+ & & - & &
. . sin ) ] cos (
= á R R
- ) sin (
+ á R R
- ) (173)
1 1 3 3 4 9 10 5
. ( . sin
[ è á è á á è
á è á á
& & + & &
. . cos ) ( . sin
+ & & + & &
. . cos ) ] sin (
= á R R
- ) cos (
+ á R R
- ) (174)
1 1 3 3 4 9 5 10
R 11 + R14
-R6 =M.g (175)
Roue 3
d
Appliqué à la roue 3, il donne :
? ?
? [ ] ? [
. . (cos . 1 sin . 1 ) ] ?
m è&
R á x + á y = - R sin
(
á + R R ) cos . 1 (
- á x R R
+ - ) sin á + R cos . 1 (
á y R R m g z
+ - - . ) . 1 (176)
3 1 1 10 9 15 9 15 10 16 11
dt
Et sur les différents axes, on a :
(177)
m R
. . ( . cos
è & & á è &
á & á
- . . sin ) = - R . sin cos (
á + á R R
- )
3 3 10 9 15
m R
. . ( . sin
è á è á á
& & + & &
. . cos ) sin (
= á R R
- ) . cos
+ R
3 3 9 15 10
á (178)
R 16 - R11 =m.g
(179)
1. Théorème du moment
cinétique
Roue 1
? ? mR
2
? ?
Et :
d
.
dt
MC G 1 = 4 (-2 è 1 sin
á . 1 x+ 2è 1 cos
á .1y+ (1.1 z ) (180)
MC O 1 = - mR 2 [
2( 01 sin á + 01 .ci .
cos á) .1 x+ 2( è 1 cos
á - è1.a. sin á) .1
y+ 4.1 91 (181)
4
Le moment des forces extérieures, dans la base fixe
(x, y, z), est :
?
?
?
??
(182)
? 0 ? ? R á R á ? - R -
2 . sin - ?- ? . sin ? . cos á
1 . cos á ? r R
. sin ? á - R . cos á C
. sin á
5 4 7 1
? ? ? ? ? ? ? ? ? ?
Mext = 0 ? - R . sin á - R
. cos á + r . cos á ? - R
á - R á + C á -
á
1 ? ? ? 1 2 ? ? ? ? 5 . cos 4 . sin ? ? 1 . cos R
7 . sin
? ? ? ? ? ? ? ? ? ?
? - R ? ? R 3 ? ? 0 ? ? R 6 ?
R8
|
Soit :
|
?
|
|
|
?
?
?
??
|
|
Mext
|
1
|
=
|
|
)
|
?
?
?
? ?
|
(x, y
,
|
z
|
)
|
(183)
|
|
-
|
sin
|
á(R1 .R +
C1) + cos á(R6
|
. r - R2. R -
R7
|
sin

)
á( .
R r R R R
- - á
6 2 . 7 ) cos ( .
+ +
R R C
1 1
R4 .r + R8
Partant des expressions (87) et (89), le théorème
du moment cinétique, projeté sur différents axes,
s'écrit :
mR 2
(ei sin a +O1 ti cosa)= sin
a(R R+C)+ cosá(R 7 +
R2 .R - R6 .r)
(184)
1 - - 1- 1
2
mR
(o1 . cosá - d1. ci.
sin á)= sin á(R6 .r
- R2 .R - R7 ) + cos
á(R1 .R + C1)
(185)
2
2
mR
4 ift = R 8 +
R4.r (186)
2
Chassis
Pour le châssis :
|
d ? M(c 2 + d2)
?
ei.1
. dt MCG 2 =
12
|
z (187)
|
Le moment des forces extérieures appliquées au
châssis dans la base fixe (x, y, z), sera :
? ? ?
? ?
? fsin á
2 e. cos á r
COSa R5
. sinal / 0 1
. - f sin á
2 e .cosá?
R 4
á - R12 ) . cos
á
Mext 2 r [R14 b?R 11
R10 .sin
2 = - COS a -
e.sin a A [R4 . sin a +
R5.cosa+ 0 ? 0 + cos á - e .sin
á ? [ - R 10
2
- R 6 - b
2?
10.cos á - R 9
.sin á + (R R -
R8
- R12 ) . sin á
b
?? f R9 . COS a 1 (R1:
i ? ?2 ??
Ou bien :
sin á.
?
??
á.
+
?
??
+ cos
l. R14
( R6
? ? ? ? ? ? ? ? ?
?
??
?
??
(189)
2
b +(R 11 - R6 ).
e-R14
b
(R 10 - R5). 2 + R7 -
.l
( R 4 - R9 ).
R12
f+
2
).
R11
? b
- + .( - ) +
6 11 9 4
?? e R R
. ( ) R R
2
.
?
??
? ?? f b ?
Mext = ? sin . (
á + + ( - ). + - + á
2 cos
6 11 10 5 7 12
?? R R R R
). R R
2 2 ??
?
( ). e + (R 9 +
R4).
R 13 - R8
f+
2
R 10 - R 5
Partant des expressions (187) et (189), le théorème
du moment cinétique fournit les équations suivantes, après
projection sur différents axes :
sin á .P. (R 6 - R11
) + b 2 .(R 9 - R 4 ) + LR14
-11, + cosá .[(R 6 +
R 11 ).f + (R 10 -
R5 ).b + R 7 - R
12-11.= 0 (190)
J 2 2
cos á .Le . (R 11 -
R6 ) + b 2 .(R 4 - R
9 ) - l.R14 1+ sin á . (R
6 + R 11 ).f + (R
10 - R5 ).b + R 7 - R
12-11,= 0 (191)
2 2 J
|
M ( c 2 + d2)
á&& = 2 f
12 (R 4 + R 9) +
e.(R 10 - R 5) + R 13
-R
|
8 (192)
|
Roue 3
Comme pour la roue 1, on aura :
|
? 0 ? ? - R . cos á ? ? r . sin
á ? ? - R á R á ? ? -
10 . sin + á C á
15 12 . cos 3 . sin
9 . cos R
? ? ? ? ? ? ? ? ? ?
Mext 3 = 0 ? - R . sin á + -
r . cos á ? R á + R á
+ C á + R
? ? ? 15 ? ? ? ? 10 . cos 9 . sin ? ? 3 . cos 12 . sin
á
? ? ? ? ? ? ? ? ? ?
? R
- ? ? R ? ? 0 ? ? - R ? - R
16 11 13
|
?
?
?
??
|
|
Et :
|
mR
|
2
|
(193)
(è
. sin á + è&
h. cos á) = - sin á (
R
3
3
15
3
12
2
.R + C
) + cos á(R + R11
.r) (194)
mR
03 . cos á -
è&1 .(i . sin
á) = sin á(R11 .r
+ R12 ) + cos á(
R15 .R + C3) (195)
2
2
mR 2
4
á&& = R9. r
- R13 (196)
Et le système S2 obtenu dans la base fixe,
d'équations :
m . R. ( è1 .
cosá - è&1 . ci. sin
á)= sin á(R 2 + R5) -
cosá(R 1 + R4) (197)
m . R. (
è&&1 . sin á +
è&1 . et . cos á) = - sin
á (R 1 + R4) - cos á(R 2
+ R5) (198)
R 3 + R6 = m.g (199)
M .R
2
M .R
2
.[ ( è 1 . cosá -
d1 rit. sin á )+( è
3 . cosá -d3 .6t.
sin á)] = cosá(R 4 -
R9 ) + sin á(R 10 -
R5)
(200)
IA . sin á + d1
rit. cos á )+ ( è 3 . sin
á +d3 .6t. cos á)] =
sin á(R 4 - R9 ) + cos
á(R 5 - R10)
(201) R 11 +
R14 - R6 = M.g
(202)
m . R. ( è3 .
cosá - è&3
h. sin á)=- R10 . sin
á + cosá(R 9 -
R15) (203)
m . R. ( ij 3 . sin
á + d3 .d. cos á)= sin
á(R 9 - R15 ) + R
10 . cos á (204)
R 16 - R11 = m.g
(205)
mR 2
è&&
in á
è&
.ci. cos á)= sin á (
+
)+ cosá (
2
(
1 . s
+
1
R1
.
R
C 1
R 7
R2 .
R
R6
+
-
.r) (206)

mR
è&&1 . cos á -
th. ci. sin á)= sin
á(R6 .r - R2
.R - R7 ) + cos
á(R1 .R +C)1
(207)
2
2
(
mR
ii = R 8 + R
4.r (208)
4
2
sin á.Le . (R 6 -
R11 )+b .(R 9 - R
4 ) + l.R14 ?,+ cosá .[(R
6 + R 11 ). 2 f + (R 10 -
R5 ). b 2 + R 7 - R 12 ?
LI= 0 2 J
(209)
? ?
cos á.p. (R 11 -
R6 ) + b .(R 4 - R 9
) - l.R14 li+ sin á
.[(R 6 + R 11 ). 2
f + (R 10 - R5 ). 2 b + R 7
- R 12??= 0
2 J
(210)
|
M ( c 2 + d2)
&& = 2 f
12
á - (4 + R 9) +
e.(R 10 - R 5) + R 13
-R
|
8 (211)
|
mR 2
(è&&
. sin á + è
.á&. cos á) =- sin
á( R
. R+ C
)+ cosá(R
3
3
15
3
12
11
2
+ R
.r) (212)
mR 2
(
è
cos á - è&
h. sin á)= sin
á(R
3
1
11
12 15
2
.r + R ) + cos á(
R. R+ C3 ) (213)
mR 2
4
á& & = R r R
- (214)
9 . 13
On peut constater que les deux systèmes, projetés
sur les axes fixes sont équivalents, mais celui exprimé dans les
axes mobiles est plus simple.
BIBLIOGRAPHIE
1. Cours
CASADEVALL : Introduction à MATLAB
Université de PARIS - DAUPHINE. Deug science mention Mass.
2ème année 2004
DELCHAMBRE A. : Mécanique rationnelle 1
P.U.B. Librairie cours - 42 avenue Paul Héger - 1000
Bruxelles
DELCHAMBRE A. : Mécanique rationnelle 2
P.U.B. Librairie cours - 42 avenue Paul Héger - 1000
Bruxelles
HOANG L.H. : Introduction à MATLAB et SIMULINK.
Département de génie électrique et de
génie informatique. Université
de LAVAL. QUEBEC, CANADA 1998
KAMABU Ts. : Machines électriques
2ème graduat électromécanique. UNILU.
2000-2001
KAMABU Ts. : Complément machines électriques
2ème grade électromécanique. UNILU.
2003-2004
LEDUC B. : Cinématique et dynamique des machines
LIASA NK. : Electronique de puissance
2ème grade électromécanique. UNILU.
2003-2004
MPANDA M. : Complément d'électrotechnique
2ème grade électromécanique. UNILU.
2003-2004
2. Ouvrages
ANNEQUIN ET BOUTIGNY : Cours de physique : Mécanique 2
2ème édition. Librairie VUIBERT. 1974. 269
pages
FOUILLE A. : Electrotechnique à l'usage des
ingénieurs. Tome 3 : Machines continues - électronique de
puissance
10ème édition. DUNOD. 264 pages
GRECIAS P. et MIGEON J.P. : Physique 2
Techniques de documentation LAVOISIER. 1988. 536 pages
PEREZ J.P. : Mécanique : Fondements et applications
6ème édition. DUNOD 2001. 748 pages
2.5 PROVOST P. et JOYAL M. : Mécanique
Masson et Cie. 1972. Paris.
3. Sites Web
WWW.
enstimac.fr/~louisnar/matlab/polymatlab.pdf
WWW.devinci.fr/cs/manifestations/matlab
2002/09 Plain.pdf
WWW.
itp.nat.uni-magdeburg.de/matlab/techdoc/ref/ode45.html
WWW.sciences.univ-nantes.fr/physique/perso
INDEX
A.


F. Flux
Acceleration ADAMS-BASHFOR-MOULTON Adhérence
Force Frottement
G. Glissement
H. HEUN
I.
Inclinaison Inconnue
Intégration
L.

LAGRANGE Lagrangien
Liaisons
Linéarité

Améliorations
Angle de rotation
B.

Barycentre Bille
C.

Centre
Châssis
Cinématique Cinétique
Code
Coefficient Complexité Couple
Courant
D.
|
DARBOUX Dynamique
E.
|
Masse
MATLAB Modèle
Moment
Mouvement
N.
|
|
|
Energie Entrée
Equation Erreur
Essieux EULER Evaluation
|
|
|
Numérique
|
M.
O. V.
Variable Vecteur Vitesse
Orientation
P.

Paliers Paramètre
Pente Poids Position
Potentiel Précision
R.

Rayon Référentiel Résistance
Résultats
Robot Rotation
Roues RUNGE-KUTTA
S.

Simulation SIMULINK Sol
Solution
Sortie
Symétrique
T.

Tangente TAYLOR Temps
Tension Théorème Tolérance Transformation
Translation
TABLE DES FIGURES ET TABLEAUX
Figure 1 : Projections orthogonales du robot
Figure 2 : Déplacement infinitésimale d'une roue ;
Figure 3 : Roue 1 suivant une orientation á
Figure 4 : Robot suivant une orientation á
Figure 5 : Vue éclatée du robot avec ses corps
rendus libres Figure 6 : Projections orthogonales de la roue 1 rendue libre
Figure 7 : Projections orthogonales du châssis rendu libre Figure 8 :
Projections orthogonales de la roue 3 rendue libre Figure 9 : Différents
axes relatifs au plan incliné
Figure 10 : Schémas de résolution numérique
d'une équation différentielle Figure 11 : Ordinogramme relatif au
script dynamique_moteurCC
Figure 12 : Ordinogramme relatif au script boucle_robot
Figure 13 : Vue d'ensemble des différents traitements Tableau 1 :
Terminologie du modèle cinématique
Tableau 2 : Terminologie du modèle dynamique
TABLE DE MATIERE
EPIGRAPHE I
IN MEMORIUM II
DEDICACE III
AVANT PROPOS IV
INTRODUCTION - 1 -
1. PROBLEMATIQUE - 1 -
2. SUBDIVISION DU TRAVAIL - 2 -
PRESENTATION DU PROBLEME - 3 -
|
Chapitre 1 : MODELE CINEMATIQUE
1. TERMINOLOGIE
2. DESCRIPTION DES DIFFERENTS MOUVEMENTS
3. ETABLISSEMENT DU MODELE CINEMATIQUE
|
- 5 -
- 5 -
- 6 -
- 7 -
|
|
Chapitre 2 : MODELE DYNAMIQUE
|
- 10 -
|
|
1. TERMINOLOGIE
|
- 10 -
|
|
2. METHODE DE LAGRANGE
|
- 10 -
|
|
2.1. Expression de l'énergie cinétique
|
- 10 -
|
|
2.2. Expression de l'énergie potentielle
|
- 12 -
|
|
2.3. Expression du lagrangien
|
- 12 -
|
|
2.4. Expression des forces généralisées
|
- 13 -
|
|
2.5. Expression des équations de LAGRANGE
|
- 13 -
|
|
3. METHODE DES THEOREMES GENERAUX
|
- 13 -
|
|
3.1. Diagrammes des corps rendus libres
|
- 14 -
|
|
3.2. Théorème de la résultante
cinétique
|
- 18 -
|
|
3.3 Théorème du moment cinétique
|
- 19 -
|
|
3.4. Système d'équations à
résoudre
|
- 24 -
|
|
4. COMPARAISON ENTRE LES DEUX METHODES
|
- 26 -
|
Chapitre 3 : AMELIORATIONS - 27 -
1. PRISE EN COMPTE DE LA DYNAMIQUE DES MOTEURS - 27 -
2. PRISE EN COMPTE DU FROTTEMENT DANS LES LIAISONS DU ROBOT - 28
-
3. PRISE EN COMPTE DE L'INCLINAISON â DU PLAN
D'APPUI DU ROBOT PAR RAPPORT AU SOL (HORIZONTAL) ... -
29 -
|
3.1. Théorème de la résultante
cinétique
3.3. Théorème du moment cinétique
4. MODELE COMPLET
|
- 30 -
- 32 -
- 33 -
|
|
Chapitre 4 : DESCRIPTION DE L'ARCHITECTURE DU PROGRAMME
|
- 34 -
|
|
1. GENERALITES
|
- 34 -
|
|
1.1 But du chapitre
|
- 34 -
|
|
1.2 Résolution numérique d'une équation
différentielle ordinaire d'ordre n
|
- 34 -
|
|
1.3. Développement des intégrateurs
numériques utilisés par le logiciel MATLAB
|
- 35 -
|
2. FICHIER PARAMETRES_ROBOT.M
|
- 44 -
|
3. FICHIER DYNAMIQUE_MOTEURCC.M
|
|
- 44 -
|
|
|
4 FICHIER BOUCLE_ROBOT.M
|
- 45 -
|
|
5. FICHIER ROBOT_MOBILE.M
|
- 47 -
|
|
Chapitre 5 : VALIDATION DU CODE ET RESULTATS
|
- 49 -
|
|
1. CHOIX DE LA METHODE DE VALIDATION
|
- 49 -
|
|
2. COMPORTEMENT DU ROBOT
|
- 50 -
|
|
3. CONCLUSIONS
|
- 50 -
|
CONCLUSIONS GENERALES - 51 -
-
- - - - - - - -
Modélisation et simulation d'un robot mobile
sur roues avec le logiciel
MATLAB/SIMULINK
|
- 68
|
|
1. OBJECTIFS ACCOMPLIS
|
- 51
|
|
2. METHODES DE RESOLUTION
|
- 51
|
|
2.1. Performances
|
- 52
|
|
2.2. Limitations
|
- 52
|
|
3. INTERET DU PROJET
|
- 52
|
|
4. VALIDITE DES RESULTATS
|
- 52
|
|
5. PROBLEMES EN SUSPENS
|
- 52
|
|
6. PERSPECTIVES
|
- 52
|
|
ANNEXES
ANNEXES1 : LES DIFFERENTS SCRIPTS
ANNEXES 2 : THEOREMES GENERAUX APPLIQUES AU ROBOT DANS LA BASE
FIXE
BIBLIOGRAPHIE
INDEX
|
- 53 -
- 53 -
- 54 - - 62 - - 64 -
|
|
A.
|
- 64 -
|
|
B.
|
- 64 -
|
|
C.
|
- 64 -
|
|
D.
|
- 64 -
|
|
E.
|
- 64 -
|
|
F.
|
- 64 -
|
|
G.
|
- 64 -
|
|
H.
|
- 64 -
|
|
I.
|
- 64 -
|
|
L.
|
- 64 -
|
|
M.
|
- 64 -
|
|
N.
|
- 64 -
|
|
O.
|
- 65 -
|
|
P.
|
- 65 -
|
|
R.
|
- 65 -
|
|
S.
|
- 65 -
|
|
T.
|
- 65 -
|
|
V.
|
- 65 -
|
TABLE DES FIGURES ET TABLEAUX - 66 -
TABLE DE MATIERE - 67 -
| 

