|

République Algérienne Démocratique
et Populaire
Université Abou Bakr Belkaid- Tlemcen
Faculté
des Sciences
Département d'Informatique
Mémoire de fin d'études
Pour l'obtention du diplôme de Master en
Informatique
Option: Réseaux et
Systèmes Distribués
Thème
...................................................
Réalisé par :
- .......................................
- ......................................
|
Présenté le.. Juin 2012 devant le jury
composé de MM.
-
|
(Président)
|
- Mme Labraoui Nabila (Encadreur)
- ......................................................
(Examinateur)
- ......................................................
(Examinateur)
Année universitaire : 2011-2012
Résumé
La localisation dans les réseaux de capteurs
déployés de manière aléatoire consiste à
déterminer les coordonnées géographiques des
différents capteurs. L'utilisation de mécanismes de localisation
dans les réseaux de capteurs est essentiel, à la fois pour les
protocoles de communication (routage géographique) que pour certaines
applications (suivi de véhicules, détection
d'événements critiques). Dans ce mémoire, nous avons
implémenté et évalué un des algorithmes de
localisation de type range-free, nommé DV-HOP. Nous avons
également proposé une amélioration de cet algorithme afin
de minimiser l'erreur d'estimation et donc obtenir une meilleure
précision de calcul des coordonnées des noeuds capteurs. Nos
résultats de simulation ont démontré l'efficacité
de notre proposition par rapport à la version basique de DV-HOP.
Mots clés: Réseaux de capteurs
sans fil, localisation, Dvhop, TinyOS, NesC.
Introduction générale
Le besoin d'observer et éventuellement de
contrôler des phénomènes physiques tels que la
température, la pression ou encore la luminosité est essentiel
pour de nombreuses applications industrielles, scientifiques, et même
grand public. Cette tâche est déléguée aux capteurs
dont la fonction est l'acquisition de l'information sur les
phénomènes observés et, le cas échéant,
l'exécution des traitements qui s'y attachent. L'utilisation des
capteurs n'est pas une nouveauté en soi. En effet, grâce aux
récents progrès des technologies sans fil, les capteurs peuvent
communiquer non seulement de proche en proche mais aussi d'acheminer de
l'information à tous les noeuds connectés au réseau. On
s'est ainsi affranchi de la contrainte de câblage, qui limitait
considérablement le déploiement d'un grand nombre de noeuds. Il
est donc devenu tout à fait possible de déployer un réseau
constitué d'un grand nombre de capteurs collaboratifs afin de surveiller
une zone plus large.
Les réseaux de capteurs sans fil sont
considérés comme un type spécial de réseaux ad hoc.
Ils apportent une perspective intéressante : celle de réseaux
capables de s'auto-configurer et de s'auto-gérer sans qu'il y ait besoin
d'interventions humaines. Les noeuds sont généralement
déployés de manière aléatoire à travers une
zone géographique, appelée zone d'intérêt.
Les données récoltées sont
acheminées grâce à des communications sans fil en
multi-saut (c.-à-d. de proche en proche) à une station de base
dont le rôle est entre autre d'agréger/exploiter les
données récoltées. Elle représente en quelque sorte
le point d'entrée du réseau de capteurs.
Parmi les problèmes cruciaux, deux d'entre eux peuvent
être cités :
? celui de la Localisation : une grande
majorité des applications dans les
réseaux de capteurs utilise un déploiement
aléatoire d'un grand nombre de capteurs, en raison soit de
l'hostilité de la zone à surveiller, soit de son
immensité. La phase de localisation est donc nécessaire non
seulement au fonctionnement du réseau (routage géographique par
exemple), Il est donc nécessaire de localiser, avec la meilleure
précision possible, tous les noeuds du réseau. Cette
problématique, malgré les nombreux travaux de recherche qui s'y
étaient attachés, reste une problématique ouverte.
? Couverture : une des conséquences du
déploiement aléatoire est la redondance des capteurs sur la zone
surveillée. Il est donc tout à fait judicieux, afin de prolonger
au maximum la durée de vie du réseau, de mettre en veille un
certain nombre de capteurs redondants tout en assurant une couverture totale de
la zone surveillée et en maintenant la connectivité du
réseau.
? Fusion de données : dans certains
cas de figures, il est nécessaire que tous les noeuds du réseau
aient à leur disposition un agrégat tel que la moyenne de tous
les prélèvements effectués. Ceci dans le but d'effectuer
une action concertée par exemple. Cette tâche, d'ordinaire si
facile à effectuer dans un réseau fiable, devient rapidement
problématique dans le cas d'un réseau sujet à la fois
à des perturbations environnementales constantes et à des
défaillances fréquentes.
Bien d'autres problèmes tels que l'énergie des
capteurs étant limitée, cette contrainte doit être prise en
compte afin d'allonger la durée de vie du réseau.
Ce mémoire se focalise sur la problématique de
la localisation statique dans les réseaux de capteurs sans fil. Nous
nous sommes également intéressé de près à
l'algorithme de localisation DV-HOP afin de l'implémenter et
d'évaluer ses performances selon la métrique de la
précision.
Nous avons également proposé une
amélioration de l'algorithme DV-HOP, afin de minimiser l'erreur
d'estimation. Nos résultats de simulation ont démontré
l'efficacité de notre proposition par rapport à la version
basique de DV-HOP.
La suite de ce document est constituée de 4 chapitres :
Le chapitre 1 : nous présentons une
description générale des réseaux de capteurs sans fil
ainsi que leurs caractéristiques, contraintes et
spécificités.
Le chapitre 2 : est consacré à la
problématique de la localisation.
Le chapitre 3 : présente une description
pour le système TinyOS et le langage
NesC.
Le chapitre 4 : constitue le coeur de notre
travail, dans ce chapitre nous présentons le simulateur TOSSIM avec une
brève description de ces
|
composants, ses principales caractéristiques et
fonctionnalités. Par la suite nous donnons les résultats de
simulation sous forme de graphes de plusieurs simulations, effectuées
pour obtenir des mesures pour évaluer la précision de calcul des
positions.
En fin de ce mémoire, une conclusion est donnée
pour résumer les apports essentiels de notre travail, les ouvertures et
les perspectives pour le futur.
|
Chapitre 1
Réseaux de capteurs sans fil:
Description, protocole
|
Chapitre 1 Les Réseaux de Capteurs sans
Fil
1.Introduction
Les réseaux de capteurs sans fil sont un cas
particulier des réseaux sans fil sans infrastructure (réseaux ad
hoc). En effet, ceux-ci sont constitués d'un ensemble de petits
appareils, ou capteurs, possédant des ressources particulièrement
limitées mais qui leur permettent d'acquérir des données
sur leur environnement immédiat, de les traiter et de les communiquer.
Ils présentent des intérêts considérables pour le
secteur industriel, mais aussi pour les organisations civiles où la
surveillance et la reconnaissance de phénomènes physiques sont
une priorité. En effet, un réseau de capteurs peut être mis
en place dans le but de surveiller une zone géographique plus ou moins
étendue pour détecter l'apparition de phénomènes ou
mesurer une grandeur physique (température, pression, vitesse...).
2. Définitions
Un réseau de capteur sans fil (Wireless Sensor Network ;
WSN, ou RCSF)
est un type spécial de réseau ad-hoc
défini par un ensemble coopérant de noeuds capteurs
dispersés dans une zone géographique appelée zone de
captage afin de surveiller un phénomène et récolter ses
données d'une manière autonome. Les noeuds capteurs utilisent une
communication sans fil pour acheminer les données captées avec un
routage multi sauts vers un noeud collecteur appelé noeud puits (ou
sink) qui va transmettre, via internet ou satellite, ces informations à
l'utilisateur du réseau (Figure I.1). Ainsi, l'usager peut adresser des
requêtes aux autres noeuds du réseau, précisant le type de
données requises, puis récolter les données
environnementales captées par le biais du noeud collecteur.
Chapitre 1 Les Réseaux de Capteurs sans
Fil
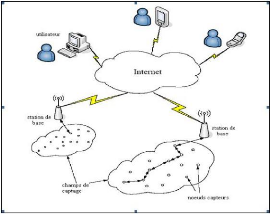
Figure I. 1 : Accès à un réseau de
capteur via Internet.
3. Domaines d'application des réseaux de
capteurs
La miniaturisation des micro-capteurs, le coût de plus
en plus faible, la large gamme des types de capteurs disponibles (thermique,
optique, vibrations, etc.) ainsi que le support de communication sans fil
utilisé, permettent l'application des réseaux de capteurs dans
plusieurs domaines parmi lesquels :
3.1 Domaine militaire
Comme pour de nombreuses autres technologies, le domaine
militaire a été le moteur initial pour le développement
des réseaux de capteurs.
Le déploiement rapide, le coût réduit,
l'auto organisation et la tolérance aux pannes des réseaux de
capteurs sont des caractéristiques qui font de ce type de réseaux
un outil appréciable dans un tel domaine. Actuellement, les RCSFs
peuvent être une partie intégrante dans le commandement, le
contrôle, la communication, la surveillance, la reconnaissance, etc.
3.2 Domaine médical
Les réseaux de capteurs sont également largement
répandus dans le domaine médical. Cette classe inclut des
applications comme : fournir une interface d'aide pour les handicapés,
collecter des informations physiologiques humaines de meilleure qualité,
facilitant ainsi le diagnostic de certaines maladies, surveiller en permanence
les malades et les médecins à l'intérieur de
l'hôpital.
Chapitre 1 Les Réseaux de Capteurs sans
Fil
3.3 Domaine architectural :
Transformation des bâtiments en environnements
intelligents capables de reconnaître des personnes, interpréter
leurs actions et y réagir
3.4 Domaine environnemental
Dans ce domaine, les capteurs peuvent êtres
exploités pour détecter les catastrophes naturelles (feux de
forêts, tremblements de terre, etc.), détecter des fruits des
produits toxiques (gaz, produits chimiques, pétrole, etc.) dans des
sites industriels tels que les centrales nucléaires et les
pétrolières.
3.5 Domaine commercial
Parmi les domaines dans lesquels les réseaux de
capteurs ont aussi prouvé leur utilité, on trouve le domaine
commercial. Dans ce secteur on peut énumérer plusieurs
applications comme : la surveillance de l'état du matériel, le
contrôle et l'automatisation des processus d'usinage, etc.
4. Architecture physique d'un capteur
Un capteur est composé de quatre composants de base:
Unité de capture, unité de traitement, unité
d'émission/réception, et une unité d'énergie. Il se
peut aussi qu'il existe d'autres composants additionnels dépendant de
l'application, par exemples: un générateur d'énergie, un
système de localisation, et un mobilisateur [1].
Chapitre 1 Les Réseaux de Capteurs sans
Fil
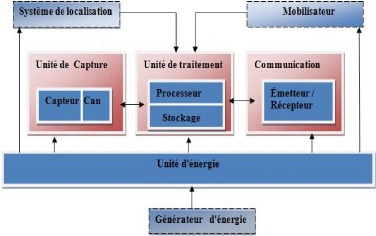
Figure I. 2: les composants d'un capteur
4.1 Unité de capture
La fonction principale de l'unité de capture est de
capturer ou mesurer les données physiques à partir de l'objet
cible. Le signale analogique correspondant aux évènements
observés par le capteur est ensuite transformé en données
numériques qui peuvent être utilisées par l'unité de
traitements.
4.2 Unité de traitements
L'unité de traitement joue un rôle majeur dans la
collaboration entre les noeuds afin d'accomplir les tâches
prédéfinies. Actuellement, il existe plusieurs familles
d'unités de traitement incluant les microcontrôleurs,
microprocesseurs, et FPGAs (Field Programmable Gate Arrays).
Les FPGAs consomment plus d'énergie et ne sont pas
compatibles aux méthodologies de programmation traditionnelles, mais le
fait qu'ils soient programmables et reconfigurables [2] présente un
réel avantage.
L'unité de traitement a besoin de stocker les
informations pendant le traitement local et l'agrégation des
données, une mémoire flash (mémoire non volatile servant
au stockage stable d'informations) est généralement
utilisée vu son coût et capacité de stockage
Chapitre 1 Les Réseaux de Capteurs sans
Fil
4.3 Unité d'émission/réception
Il existe trois schémas de communication pour les
réseaux de capteurs: la communication optique (Laser), l'infrarouge, et
la radiofréquence (RF: Radio Frequency).
Le Laser consomme moins d'énergie que la RF et fournit
une haute sécurité, mais exige l'utilisation d'une ligne optique
et il est sensible à la perturbation physique.
L'infrarouge n'a pas besoins d'antennes, mais sa capacité
de diffusion est limitée.
La RF est la plus simple à utiliser mais elle exige
l'utilisation des antennes [2].Plusieurs stratégies de réduction
de la consommation d'énergie sont développées, comme la
modulation/démodulation et le filtrage. La modulation en amplitude est
plus simple par rapport à celle en fréquence, mais elle est
susceptible au bruit
4.4 Unité d'énergie
La consommation d'énergie est un point très
important pour les réseaux de capteurs. Les batteries utilisées
sont soit rechargeables ou non. Souvent, dans les environnements sensibles, il
est impossible de recharger ou changer une batterie, donc avoir une meilleure
gestion de la consommation d'énergie est primordial pour augmenter la
durée de vie du réseau.
Il existe deux grandes politiques pour conserver la
consommation d'énergie. Dans la première, appelé DPM
(Dynamic Power Management), les composants inactifs sont mis en veille. Dans ce
cas une analyse stochastique pour prédire les prochains
évènements est Généralités sur les
réseaux de capteurs nécessaires.
Pour la deuxième, appelé DVS (Dynamic Voltage
Scheduling), l'énergie est fournie aux composants selon leur charge de
travail
Les nouveaux capteurs peuvent contenir des
générateurs d'énergie renouvelable, par exemple:
l'énergie solaire, et l'énergie mécanique (vibration,
l'aire...)
Certaines applications ont besoin de savoir l'emplacement du
capteur. Pour cette raison, le capteur doit avoir un système de
localisation telle qu'un GPS (Global Positioning System).
Pour les réseaux de capteurs mobiles, des noeuds
doivent se déplacer, donc un mobilisateur doit exister dans les
composants du capteur [1].
Chapitre 1 Les Réseaux de Capteurs sans
Fil
5. Exemple de capteur sans fil
Le modèle que nous allons présenter est le
Mica2. D'autres modèles existent chez ce fabriquant tel que le MicaZ,
l'Imote2 ou le TelosB .

Figure I. 3: Capteur Mica2.
5.1 Le capteur Mica2
Chaque Mica2 est équipé d'un processeur
cadencé à 7,37 Mhz et doté de 4ko de RAM, de 128 ko de
mémoire flash et d'un transmetteur radio à 433 MHz.
Les Mica2 peuvent être équipés de
plusieurs types de circuits intégrés permettant d'effectuer des
mesures de phénomènes naturels. Chaque carte supporte plusieurs
capteurs sous forme de composants électroniques. L'équipe SOD du
LaBRI dispose de Mica2 munis de deux types de cartes [3]:
A.La carte Crossbow
MTS300 est équipée d'un capteur de
température, d'intensité lumineuse, d'un microphone et d'un
buzzer à 4kHz (figure 1.4)
B.La carte Crossbow
MTS420, beaucoup plus complète, comporte un capteur
d'humidité et de température, un capteur de lumière
ambiante, un baromètre, un accéléromètre à
deux axes et une puce GPS (figure 1.5)
Chapitre 1 Les Réseaux de Capteurs sans
Fil

Figure I. 4: carte Crossbow MTS300

Figure I. 5: carte Crossbow MTS420
6. Architecture des réseaux de capteurs sans
fil
Un réseau de capteurs est constitué
essentiellement de : plusieurs noeuds capteurs, un noeud Sink ou plusieurs et
un centre de traitement des données.
6.1 Noeuds
Un réseau de capteurs sans fil est un réseau ad
hoc avec un grand nombre de noeuds qui sont des micros capteurs capables de
récolter et de transmettre des données environnementales d'une
manière autonome. La position de ces noeuds n'est pas obligatoirement
prédéterminée. Ils peuvent être aléatoirement
dispersés dans une zone géographique, appelée « champ
de captage » correspondant au terrain d'intérêt pour le
phénomène capté.
En plus d'applications civiles, il existe des applications
militaires aux réseaux de capteurs (détection d'intrusions,
localisation de combattants, véhicules, armes, etc. sur un champ de
bataille, sous l'eau, dans l'espace, dans le sol...)
Chapitre 1 Les Réseaux de Capteurs sans
Fil
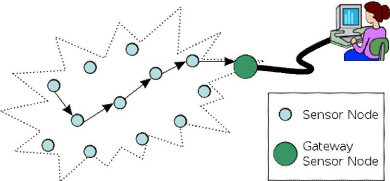
Figure I. 6: les Noeuds d'un réseau
capteur.
6.2 Sink
Et c'est un noeud particulier dans le réseau et est le
responsable de la collecte de données issues des différents
noeuds de réseau. Doit être active et illimitée
d'énergie, nous pouvons trouver deux ou plusieurs sinks pour
alléger la charge.
6.3 Centre de traitement des données
Est le centre, qui est une collection de toutes les
données envoyées par les sinks, cet endroit à le
rôle d'extraire des informations utiles afin d'exploiter
7. topologie d'un réseau de capteur
Il existe plusieurs topologies pour les réseaux de
capteurs
7.1 Topologie en étoile
La topologie en étoile est un système uni saut.
Tous les noeuds envoient et reçoivent seulement des données avec
la station de base. Cette topologie est simple et elle demande une faible
consommation d'énergie, mais la station de base est vulnérable et
la distance entre les noeuds et la station est limitée.
7.2 Topologie en toile (en grille)
La topologie en toile est un système multi saut. La
communication entre les noeuds et la station de base est possible. Chaque noeud
a plusieurs chemins pour envoyer
Chapitre 1 Les Réseaux de Capteurs sans
Fil
des données. Cette topologie a plus de possibilités
de passer à l'échelle du réseau, avec redondance et
tolérance aux fautes, mais elle demande une consommation
d'énergie plus importante
7.3 Topologie hybride
La topologie hybride est un mélange des deux topologies
ci-dessus. Les stations de base forment une topologie en toile et les noeuds
autour d'elles sont en topologie étoile. Elle assure la minimisation
d'énergie dans les réseaux de capteurs
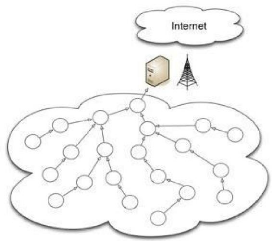
Figure I. 7: Topologie hybride d'un réseau de
capteurs sans fil
8. Communication dans les réseaux de
capteurs
8.1 Architecture de communication basée sur le
modèle OSI
Le modèle de communication comprend cinq couches qui
ont les mêmes fonctions que celles du modèle OSI ainsi que trois
couches pour la gestion d'énergie, la gestion de la mobilité et
la gestion des tâches[4].
Chapitre 1 Les Réseaux de Capteurs sans
Fil
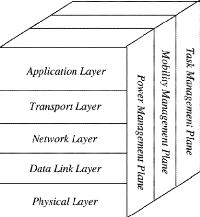
Figure I. 8: Modèle en couches du
réseau de capteurs sans fil.
Rôles des couches :
A. Couche physique : Matériels pour envoyer et
recevoir les données
B .Couche liaison : Gestion des liaisons entre
les noeuds et les stations de base, contrôle d'erreurs
C. Couche réseau : Routage et
transmission des données
D. Couche transport : Transport des
données, contrôle de flux
E. Couche application : Interface pour les
applications au haut niveau F.Plan de gestion d'énergie
: Contrôle l'utilisation d'énergie
G. Plan de gestion de mobilité : Gestion
des mouvements des noeuds
H.Plan de gestion de tâche : Balance les
tâches entre les noeuds afin d'économiser de l'énergie.
8.2 Technologies de la communication dans les
réseaux de capteurs
A. Bluetooth / IEEE 802.15.1
Bluetooth est une spécification de l'industrie des
télécommunications. Elle utilise une technique radio courte
distance destinée à simplifier les connexions entre les appareils
électroniques. Malheureusement, un grand défaut de cette
technologie est sa trop grande consommation d'énergie.
Chapitre 1 Les Réseaux de Capteurs sans
Fil
B. ZigBee / IEEE 802.15.4
ZigBee est une norme de transmission de données sans
fil permettant la communication de machine à machine. Zigbee offre des
débits de données moindres, mais sa très faible
consommation électrique et ses coûts de production très bas
en font une candidate idéale pour la domotique ou les matériels
de type capteur, télécommande ou équipement de
contrôle dans le secteur industriel.
C. Dash 7 / ISO/IEC 18000-7
Dash7 est une nouvelle technologie de réseaux de
capteurs sans fil en utilisant la norme ISO/IEC 18000-7. Sa consommation
électrique est très faible, la durée de vie de batterie
peut arriver à plusieurs ans.
Sa distance de communication est 2km. Elle fournit une faible
latence pour le suivi des objets en mouvement, un protocole petit pile, des
supports de capteurs et de sécurité et un débit de
transmission allant jusqu'à 200kbits/s.
9. Conclusion
Dans ce chapitre nous avons présenté les
réseaux de capteurs sans fil (RCSF), en exposant leurs architectures,
leurs contraintes ainsi que leurs domaines d'applications.
Dans le chapitre suivant, nous allons présenter le
principe de localisation utilisé dans des systèmes tels que GPS
et Galileo, puis nous abordons la problématique de la localisation dans
les réseaux de capteurs sans fil (RCSF).
Chapitre 2
La localisation dans les
réseaux de capteur sans fil
|
Cha itre 2 la localisation dans les
Résea x de Ca te rs sans-- Fil
p p
1. Introduction
De nombreuses applications pour les réseaux de capteurs
comme la surveillance de feu de forêt, le suivi de véhicule,
etc... Ont besoin d'avoir une information géographique pour fonctionner
efficacement. Les protocoles de routage géographique ou orienté
position vont pouvoir fonctionner sans le coûteux mécanisme de
découverte de route proactive et ainsi économiser de
l'énergie et améliorer le taux d'acheminement. De plus, dans les
protocoles de contrôle de topologie, où chaque capteur doit
ajuster sa puissance de transmission pour minimiser sa consommation
énergétique, les algorithmes ont le plus souvent besoin
d'information sur la position des voisins. [8]
2. Les systèmes de localisation
2.1 Les principaux systèmes de localisation
A. GPS (Sigle signifiant Global Positioning System)
Système de géolocalisation par satellite. Le
réseau de 24 satellites (plus 4 satellites en réserve)
actuellement en fonctionnement, développé par l'armée
américaine, est mis à disposition des civils. Il permet de
déterminer les coordonnées géographiques de n'importe quel
point situé à la surface du globe. Sa précision peut
atteindre 1 mètre. Le GPS s'utilise en association avec une carte pour
se repérer et se positionner : randonnées, voile, trek...
B. Galileo
Est le futur système de positionnement européen
par satellite. Ce système est en phase de test depuis 2004, commencera
à être utilisable en 2010 et pleinement en 2013.
Ce système vise à supprimer la dépendance
de l'Europe à l'utilisation du système américain GPS
(Global Positioning System). Cette indépendance est essentielle car le
système américain souffre de restrictions sur la précision
de positionnement, sur la fiabilité et sa continuité. De plus, le
positionnement dans certaines régions du globe n'est pas possible avec
le GPS pour des raisons techniques ou politiques.
Le système Galiléo sera entièrement sous
contrôle civil, contrairement aux autres systèmes de
positionnement existants. [9]
Chapitre 2 la localisation dans les Réseaux de
Capteurs sans Fil
C. le system IRNSS (Indian Regional Nafigational
Satellite System)
Est une proposition de système de positionnement par
satellites qui serait construit et contrôlé par le gouvernement
Indien. Il fournirait la position absolue à une précision de 20
mètres à travers toute l'Inde et à une distance de 1500
à 2000 km des frontières. Un but de contrôle complet de la
part du gouvernement Indien a été cité, ce qui implique
que toutes les parties du projet soit construites en Inde.
d. Glonass
Signifie en russe GLObal'naya NAvigatsionnaya Sputnikovaya
Sistema soit système mondial de navigation par satellite. C'est un
système de positionnement développé par l'actuelle Union
Soviétique et contrôlé pour le gouvernement russe par
l'agence spatiale russe. Il est une alternative et complémentaire du GPS
américain et du futur Galiléo européen.
Le développement de Glonass a débuté en
1976 avec pour but une couverture mondiale en 1991. Le premier lancement de
satellite a eu lieu le 12 octobre 1982 et la totalité des satellites
furent mis en orbite en 1995. Cependant, après l'achèvement du
projet, le système se délabra avec l'effondrement de
l'économie russe. Les Russes lancèrent un grand projet de
restauration du système en 2001, en introduisant notamment le
gouvernement indien en tant que partenaire, et accélérant ainsi
le programme de restauration du système a été
achevé en 2009. [9]
2.2 Le système GPS
A. La structure du système GPS
Le système GPS peut être séparé en
trois parties : le segment de contrôle, le segment spatial et le segment
utilisateur.
? Le segment de contrôle
Le segment de contrôle est formé par six stations
de contrôle appartenant aux forces armées américaines de
l'air (USAF), reparties tout autour du globe en fonction de la longitude.
Le but de ces stations est de contrôler la santée
du segment spatial et de maintenir le temps du système, le GPS-time
(GPST). De manière plus précise, ces stations permettent de
contrôler l'état de santé des satellites ainsi que leur
trajectoire, prédire les éphémérides des satellites
et les paramètres de l'horloge, mettre a jour les messages de
Chapitre 2 la localisation dans les Réseaux de
Capteurs sans Fil
navigation des satellites, commander de petites manoeuvres
afin de réinitialiser une orbite.
V' Le segment spatial
Le système GPS est formé de 31 satellites
(situation au 27 août 2009) en orbite quasi circulaire
(excentricité <0,01) a une altitude de 20200 km. Leur période
est de 11h58 minutes, soit un demi jour sidéral. Ces satellites sont
repartis sur six plans orbitaux inclinés 55° par rapport au plan
équatorial.
Chaque satellite contient plusieurs horloges atomiques,
certains ont quatre horloges (deux au rubidium et deux au césium),
certains en ont trois au césium et, dans les plans de modernisation du
GPS, les prochains satellites auront des maser a hydrogène, qui sont
extrêmement précis. Ce sont les stations au sol qui
sélectionnent l'horloge la plus précise. En effet, ces horloges
perdent ou gagnent moins d'une nanoseconde par jour !
Les satellites sont lancés par blocs qui ont tous des
spécifications. V' Le segment utilisateur
Le segment utilisateur rassemble l'ensemble des utilisateurs
du système, du simple utilisateur aux géomètres et aux
militaires. L'ensemble de ces utilisateurs peut être sépare en
deux catégories, selon la prestation du systéme qu'ils utilisent.
[10]
B. Le principe de GPS
Voici une illustration en deux dimensions du principe de la
détermination de la position d'un récepteur GPS:
Chacun des trois satellites S1, S2 et S3 envoie un signal
indiquant sa position ainsi que le moment de l'envoi du signal.
A partir des temps de parcours de ces trois signaux, le
récepteur GPS placé en P calcule sa distance à chacun des
trois satellites.
Le point P est l'unique point d'intersection de ces trois
cercles.
Dans l'espace, les signaux de quatre satellites sont
nécessaires pour déterminer de façon univoque la position
de P. Le point P est alors l'unique point d'intersection de quatre
sphères.
Chapitre 2 la localisation dans les Réseaux de
Capteurs sans Fil

Figure II. 1: principe de mesure GPS.
3. la localisation matérielle
La localisation dans les réseaux de capteurs
dépend de plusieurs dispositifs matériels. Cette
dépendance se relève à l'utilisation des ancres (beacons),
et à l'estimation des distances entre les noeuds. Dans cette section
nous présentons la définition d'une ancre et son mode
d'utilisation, et nous introduisons également les différentes
techniques d'estimation de la distance. [11]
3.1 Ancres/Beacons
L'objectif de la localisation est de déterminer les
coordonnées physiques d'un groupe de noeuds. Ces coordonnées
peuvent être globales, c'est à dire qu'elles sont alignées
avec un système extérieur comme le système GPS par
exemple, ou bien relatives, ce qui signifie qu'elles forment une transformation
rigide (rotation, réflexion, translation) des coordonnées du
système global. Dans le deuxième cas, on n'a pas besoin de la
position des noeuds pour fonctionner, une carte relative est suffisante. Les
méthodes qui créent une carte relative des coordonnées
sans recours aux ancres sont appelées « anchor-free ». Par
contre d'autres méthodes ne fonctionnent pas sans connaître la
position d'un certain nombre d'ancres à priori, sont appelées
« anchor-based ». [11]
Les ancres (souvent appelées aussi beacons) sont au
préalable nécessaires pour localiser les noeuds d'un
réseau dans un système de coordonnées global. Les ancres
sont simplement des noeuds ordinaires qui connaissent leurs coordonnées
à priori. Cette connaissance pourrait être difficilement
codée, ou bien facilement acquise par un certain matériel
supplémentaire comme un récepteur GPS. Au minimum, trois ancres
non-colinéaires sont nécessaires pour définir un
système de coordonnées en deux dimensions.
Chapitre 2 la localisation dans les Réseaux de
Capteurs sans Fil
Les ancres peuvent être utilisées de plusieurs
façons. Certains algorithmes de localisation trouvent une carte
arbitraire relative pour les coordonnées des noeuds, puis ils utilisent
les ancres pour déterminer une transformation rigide des
coordonnées relatives vers les coordonnées globales. D'autres
algorithmes, partant des positions des ancres, calculent les positions des
noeuds non-ancres dans un système global. [11]
3.2 Estimation de distances
Parmi les méthodes de localisation dans les
réseaux de capteurs nous distinguons entre deux catégories, les
méthodes qui ne sont pas basées sur la distance inter-noeuds et
d'autres qui y sont. Les premières sont celles qui ne calculent pas de
distances entre voisins. Elles utilisent d'autres informations telles que la
connectivité pour estimer la position des noeuds.
Les deuxièmes sont des méthodes qui estiment les
distances entre les noeuds pour calculer les positions. Plusieurs techniques
sont développées pour les estimations des distances entre les
noeuds voisins. Parmi lesquelles nous trouvons celles qui sont basées
sur les dispositifs radio comme la méthode de la force du signal
reçu « Received Signal Strength Indication (RSSI) » et la
technique d'estimation de la distance par le nombre de sauts radios «
Radio hop count » ; et celles qui sont fondées sur l'utilisation
d'autres matériels (microphones, etc) comme la technique de la
différence entre les temps d'arrivée de deux signaux « Time
Différence of Arrival (TDoA) » Et celle qui estime l'angle
d'arrivée du signal « Angle of Arrival (AoA) ».
4. Critères de localisation
Un algorithme de localisation est évalué selon une
liste de critères dont nous citons :
4.1 Précision de la localisation
L'erreur de la localisation est souvent définit comme
étant, la distance euclidienne entre les vraies positions des noeuds et
celles estimées par l'algorithme. L'objectif d'un algorithme de
localisation est de minimiser cette erreur pour augmenter la précision
de localisation. Généralement, cette imprécision vient de
l'imprécision des methodes d'estimation de la distance. Les obstacles
environnementaux et les terrains irréguliers peuvent influencer la
précision des algorithmes de localisation. Des obstacles
Chapitre 2 la localisation dans les Réseaux de
Capteurs sans Fil
comme de gros rochers peuvent interférer avec les ondes
radios, et empêcher l'utilisation de « TDoA » du fait qu'on n'a
plus une ligne droite.
4.2 Contraintes de ressources
Les noeuds capteurs possèdent
généralement des resources très limitées. Ils
possèdent de faibles processeurs et de petites mémoires, ce qui
rend les grands calculs irréalisables. Par conséquent, un
algorithme de localisation doit être simple et non complexe et son
développement n'exige pas de grands calculs ni de grande capacité
de stockage de mémoire. De plus, nous ajoutons la rapidité de
l'algorithme. Avec quelle rapidité le système de localisation
renvoie-t-il les positions des noeuds ? Ceci est particulièrement
important, surtout lors du traçage d'un chemin d'une cible.
4.3 Contraintes énergétiques
La seule source d'énergie d'un noeud capteur est sa
batterie. Pour cela, dans les réseaux de capteurs, une gestion de
l'énergie très économique est nécessaire. Comme le
facteur dominant de la consommation d'énergie est la communication
radio, il faut trouver un algorithme de localisation qui communique le moins
possible via la radio.
4.4 Passage à l'échelle
Les réseaux de capteurs sont généralement
envisagés à large échelle, avec des centaines voir des
milliers de noeuds. La question qui se pose, est-ce qu'un algorithme de
localisation fonctionne sur un réseau de plusieurs milliers de noeuds ?
Et si oui, est-il toujours aussi efficace ? Ce critère est en rapport
avec le fait qu'un algorithme soit implémentable de façon
distribuée ou non.
Pratiquement, il est impossible de tenir compte de tous ces
critères lors du développement d'un algorithme de localisation.
Néanmoins, il peut être intéressant de les garder à
l'esprit afin de pouvoir rendre notre méthode meilleure selon tel ou tel
critère.
5. Algorithmes de localisation
Cette section est destinée aux algorithmes de
localisation. Nous distinguons deux façons d'implémenter un
algorithme de localisation selon leur organisation de calcul : les algorithms
centralisés et les algorithmes distribués.
Chapitre 2 la localisation dans les Réseaux de
Capteurs sans Fil
5.1 Algorithmes centralisés
Les algorithmes centralisés sont conçus pour
fonctionner sur une machine centrale très puissante au niveau
ressources. Les noeuds capteurs recueillent des informations (signal, voisins,
distances, etc) de leur environnement et les transmettent à une station
de base qui à son tour les analyse, calcule les positions et les
transmet aux noeuds. Les algorithmes centralisés contournent le
problème des ressources limitées des noeuds en acceptant des
coûts de communications très élevés pour envoyer les
informations à la machine centrale. Ces algorithms deviennent de plus en
plus coûteux quand la taille du réseau augmente, car ça
épuise les noeuds qui sont trop proches de la station de base qui
subissent un très grand nombre de communications. En outre, les
algorithmes centralisés exigent qu'une station de base puissante soit
déployée parmi les noeuds, ce qui n'est pas toujours possible.
Dans le cas où c'est possible, le problème de la mise à
l'échelle peut être résolu en déployant plusieurs
stations de bases.
Cependant, La centralisation permet à un algorithme
d'être plus complexe, car les calculs se font sur la machine centrale et
non pas par les noeuds eux mêmes. [11].
5.2 Algorithmes distributes
Dans le cas d'un algorithme distribué, tous les noeuds
communiquent avec leurs voisins pour estimer les distances et échanger
les informations de voisinage, afin de dériver leur position. Par
conséquent, à la fin du processus de localisation, chaque noeud
doit connaître sa position ainsi que celles de ses voisins sans l'aide
d'aucune unité centrale. Les algorithmes distribués, extrapolent
généralement les positions des noeuds à partir de celles
des ancres. Ainsi, ils localisent les noeuds directement dans le système
de coordonnées global de ces ancres.
Comme le calcul des positions se fait par les noeuds eux
mêmes, les algorithmes distribués ne sont pas complexes. Pour les
réseaux à grande échelle, on considère qu'une
méthode distribuée est nécessaire car les méthodes
centralisées demanderaient trop de communication pour l'acheminement des
informations vers l'unité centrale et consommeraient donc trop
d'énergie.
Chapitre 2 la localisation dans les Réseaux de
Capteurs sans Fil
5.3 Comparaison
Une comparaison entre les algorithmes distribués et
centralisés est présentée dans le tableau 2.1. Cette
comparaison montre les différentes caractéristiques de ces
algorithmes en tenant compte des critères de localisation.
|
Algorithmes
|
Centralisés
|
Distribués
|
|
Precision
|
Bonne à cause du calcul complexe.
|
Moyenne/faible.
|
|
Contraintes resources
|
Non, les calculs se font sur la machine puissante.
|
Oui, les noeuds font le
calcul.
|
|
Complexité
|
Très complexes, O(n2),
O(n3).
|
Non complexes.
|
|
Consommation
|
d'énergie Forte, grand
nombre de
communications.
|
Faible.
|
|
Passage à l'échelle
|
Non robustes
|
Robustes
|
Tableau II. 1: Comparaison entre algorithmes
centralisés et distribués.
6. Les technologies de mesure
Plusieurs technologies permettent à un capteur de mesurer
la distance qui le sépare d'un capteur voisin (ToA, TDoA, RSSI) ou bien
de mesurer l'angle qu'il forme avec celui-ci (AoA).
6.1 Temps d'arrivée
La technologie ToA (Time of Arrival) suppose que les noeuds du
réseau sont synchrones. La distance qui sépare deux capteurs se
déduit de la vitesse de propagation du signal et de la différence
entre les dates d'émission et de réception du message. Cette
technologie est celle utilisée par le système GPS (Global
Positioning System) .
Lorsque les noeuds ne sont pas synchrones, l'envoi d'un
message aller-retour est nécessaire. En fonction de son horloge, de la
vitesse de propagation du signal et du temps de traitement du signal
reçu, un capteur récepteur obtient la distance qui le
sépare du capteur émetteur en calculant la différence
entre les dates d'émission et de réception, en y soustrayant le
temps de traitement du signal, puis en divisant le résultat par deux.
Cela suppose que les noeuds du réseau ont un temps de
traitement du signal identique.
Chapitre 2 la localisation dans les Réseaux de
Capteurs sans Fil
6.2 Différence des temps d'arrivée
La technologie TDoA (Time Difference of Arrival) (Savvides et
al. 2001) se base sur la différence des dates d'arrivée d'un ou
plusieurs signaux et suppose également que la vitesse de propagation des
signaux est connue. Cette technologie s'applique dans les cas suivants :
- un émetteur envoie des signaux de natures
différentes (par exemple, l'ultrason, l'onde radio, ...) à un
récepteur.
- un récepteur reçoit des signaux d'une même
nature d'au moins trois émetteurs.
- un émetteur envoie un signal reçu par au moins
trois récepteurs (dans ce dernier cas une vue globale des signaux sera
connue).
Dans chacun des cas, les récepteurs mettent en
corrélation leurs informations et en déduisent les distances qui
les séparent des émetteurs. Il s'agit d'une simple resolution
d'un système d'équations dont les distances sont les
inconnues.
6.3 Puissance du signal
La puissance d'émission et de réception d'un
signal peut être également exploitée pour obtenir la
distance entre deux capteurs. La technologie RSSI (Received Signal Strength
Indicator) (Bahl et Padmanabhan, 2000) considère la perte de puissance
d'un signal entre son émission et sa réception. Cette perte varie
en fonction de la distance entre les deux capteurs : plus les capteurs sont
éloignés (resp.proches), plus la perte est importante (resp.
faible). Cette perte sera alors traduite en une distance.
6.4 Angle d'arrivée
La technologie AoA (Angle of Arrival) (Niculescu et Nath,
2003a) calcule l'angle formé entre deux capteurs. Chaque capteur est
doté d'antennes orientées de sorte à déduire
l'angle qu'il forme avec un voisin lorsque ce dernier lui envoie un signal. Cet
angle est reporté par rapport à un axe propre au capteur.
Toutefois, un capteur peut être équipé d'une boussole et,
dans ce cas, l'angle sera reporté sur un des axes nord, sud, est ou
ouest. [12]
7. Les méthodes libres de mesure
Dans cette famille de méthodes, les capteurs cherchant
à déterminer leurs positions s'appuient uniquement sur les
positions des ancres. Aucune mesure de distance ou d'angle n'est
utilisée. Par conséquent, ces méthodes ne peuvent fournir
que
Chapitre 2 la localisation dans les Réseaux de
Capteurs sans Fil
des positions estimées aux capteurs. Les
méthodes (He et al. 2005; Bulusu et al., 2000; Nagpal et al., 2003; Chan
et al., 2005; Datta et al., 2006; Liu et al., 2007, 2005c), pour ne citer
qu'elles, sont des exemples de méthodes libres de mesure.
Il existe deux techniques courantes dans ce type de
méthodes. La première consiste à définir des zones
contenant les capteurs dont les centres de gravité correspondent
à leurs positions estimées. Par exemple, dans (He et al. 2005)
les auteurs proposent le raisonnement suivant : soit n étant le nombre
d'ancres dans le réseau, chaque ancre diffuse sa position. Lorsqu'un
capteur obtient les positions des n ancres, il calcule tous les triangles
possibles qu'il peut former avec ces positions et obtient alors un ensemble de
triangles. Ensuite, pour chaque triangle, le capteur détermine s'il se
situe à l'intérieur ou à l'extérieur. Après
avoir déterminé son appartenance ou non à chacun des
triangles, il en déduit une zone le contenant et calcule sa position
estimée comme étant le centre de gravité de cette zone. En
présence d'un pourcentage faible d'ancres dans le réseau, cette
solution est intéressante. En revanche, si l'augmentation de ce
pourcentage améliore la précision des positions, elle engendre
dans le même temps des calculs importants pour les capteurs.
Dans (Datta et al. 2006), les auteurs définissent des
zones en utilisant non pas des triangles mais des polygones.
Dans la seconde technique, chaque capteur estime les distances
qui le séparent des ancres et applique la multilatération pour
calculer sa position estimée. La méthode HTRefine (Savarese et
Rabaey, 2002) utilise ce procédé. Ce schéma est
également adopté par des méthodes basées
mesures.
HTRefine
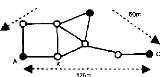
75m,--' B At.
Figure II. 2 : DV-hop
Au commencement de la méthode HTRefine, toutes les ancres
diffusent leurs positions.
Chapitre 2 la localisation dans les Réseaux de
Capteurs sans Fil
Lorsqu'un capteur reçoit la position d'une ancre, il
estime la distance qui le sépare d'elle. Pour ce faire, HTRefine utilise
la technique d'estimation des distances DV-Hop.
Dans cette technique, lors de l'inondation des positions des
ancres, chaque capteur calcule le nombre de sauts minimum qui le sépare
de chacune des ancres. Une deuxième vague d'inondation fournit
suffisamment d'informations au capteur pour qu'il puisse convertir ces nombres
de sauts en estimations de distances. La conversion consiste à
multiplier le nombre de sauts séparant le capteur d'une ancre par une
distance moyenne entre deux capteurs voisins. Lors de la première vague,
lorsqu'une ancre A reçoit la position d'une ancre B, elle calcule la
distance euclidienne qui les sépare et la divise par le nombre de sauts.
Elle obtient ainsi une moyenne des distances des sauts entre elle et B et la
communique aux capteurs. Lorsque A reçoit d'autres positions d'ancres,
elle calibre à nouveau sa distance moyenne et diffuse cette mise
à jour aux capteurs afin qu'ils puissent affiner leurs estimations de
distances.
DV-Hop
La figure 2.2 est une illustration de DV-Hop où l'ancre
A estime la distance moyenne d'un saut. Les noeuds noirs représentent
les ancres et les noeuds blancs les capteurs non localisés. Trois sauts
séparent A et B alors que quatre séparent A de C. L'ancre A
calcule les distances euclidiennes d AB = 75m et d AC = 125m. La distance
moyenne d'un saut est donnée par la fraction (125+75)/ (3+4)= 28.75
m.
Le capteur X estimera les distances avec B et C comme suit : d
XB = 2* 28.57 et d XC = 3 * 28.57.
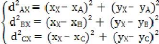
Pour obtenir leurs positions, les capteurs utilisent ensuite
la multilatération. En reprenant l'exemple de la figure 2.2, X obtiendra
sa position en résolvant le système suivant :
Finalement, un processus de raffinement des positions est
effectué. En effet, après avoir estimé leurs positions,
les capteurs les diffusent à leurs voisins. En fonction de ces
données et grâce aux relations de voisinage, les capteurs
calculent à nouveau leurs positions qui se rapprochent de leurs
positions réelles. Après un nombre d'itérations
défini, les capteurs fixent leurs positions estimées. [12]
Chapitre 2 la localisation dans les Réseaux de
Capteurs sans Fil
8. Conclusion
Dans ce chapitre nous avons abordé la
problématique de la localisation plus particulièrement dans les
réseaux de capteurs sans fil. Nous avons également
présenté les différentes technologies utilisées
ainsi que quelques algorithmes existants (DV-Hop).
Dans le chapitre suivant, nous allons présenter le
système d' exploitation TinyOs un système open source
embarqué pour les RCSF afin de pouvoir comprendre son fonctionnement et
présenter le langage NESC pour l'implémentation des
applications.
Chapitre 2 la localisation dans les Réseaux de
Capteurs sans Fil
Chapitre III
Description de l'architecture
de la plateforme TinyOS :
un système d'exploitation
pour les réseaux de capteurs
Chapitre 3 Description de l'architecture de la
plateforme TinyOS
Chapitre 3 Description de l'architecture de la
plateforme TinyOS
1. Introduction
Suite aux différents problèmes vécus par
les réseaux de capteurs (problème énergétiques et
de mémoire), l'université de Berkeley a développé
alors un système d'exploitation minime destiné pour ces
réseaux : TinyOS, Il est orienté "composants"
afin de faciliter l'implémentation de ces réseaux, tout en
minimisant la taille du code afin de respecter les contraintes de
mémoire des composants matériels [5]
TinyOS, comme les applications tournant dessus, a
été écrit en NesC. Ce langage a été
inventé pour répondre aux attentes des systèmes
embarqués. Il possède une syntaxe proche de C, supporte le
système multitâche de TinyOS et défini des
mécanismes pour architecturer et "linker" des composants logiciels en un
système embarqué robuste [6].
Dans ce chapitre, nous introduirons le mode de fonctionnement
de la plateforme TinyOS, ainsi que le langage NesC et Cette description va nous
permettre par la suite (dans le chapitre 4) d'implémenter un algorithme
de localisation dans les RCSF
2. TinyOS: Tiny Micro threading Operating System
2.1 Présentation
TinyOS est un système d'exploitation open-source,
intégré, modulaire, destiné aux réseaux de
capteurs. Il respecte une architecture basée sur une association de
composants, réduisant la taille du code nécessaire à sa
mise en place afin de respecter les contraintes de mémoires qu'observent
les réseaux de capteurs.
En effet, TinyOS est constitué de plusieurs modules
disponibles pour les applications et offrant des fonctions de capture de
mesures ou de communication. Il n'existe pas d'exécutable pour le noyau
du système, il est construit au moment de la compilation de
l'application en fonction des composants qu'elle utilise. Le langage de
programmation associé, le nesC, qui est une extension du langage C,
permet de déclarer les composants ainsi que les liens qui les unissent
et de faire l'association code/composants.
Chapitre 3 Description de l'architecture de la
plateforme TinyOS
TinyOS s'appuie sur un fonctionnement
évènementiel, c'est à dire qu'il ne devient actif
qu'à l'apparition de certains évènements, par exemple
l'arrivée d'un message radio.
Le reste du temps, le capteur se trouve en état de
veille, garantissant une durée de vie maximale connaissant les
faibles ressources énergétiques des capteurs. Ce type de
fonctionnement permet une meilleure adaptation à la nature
aléatoire de la communication sans fil entre capteurs [7].
2.2 Principes de TinyOS
Un composant est constitué d'au moins
un module utilisant et fournissant des
interfaces. S'il contient plusieurs modules les liens entres
eux sont décrits par un fichier de configuration.
Une application complète est un composant contenant
plusieurs modules liés entre eux dont un module Main
qui permet de démarrer.
Le SE offre une centaine de composants que l'on peut utiliser
pour écrire des applications. Quand le programme est
généré par le compilateur, seuls les composants
utilisés (y compris ceux du système) sont présents.
Main est lui-même connecté à certains
composants du système (comme l'ordonnanceur par exemple) qui seront donc
chargés en mémoire puis lancés par Main
On va décrire dans des fichiers portant le suffixe .nc
les modules, les interfaces et les configurations. Une application
comporte donc plusieurs de ces fichiers.

Figure III. 1: Symbole de system TinyOS
Chapitre 3 Description de l'architecture de la
plateforme TinyOS
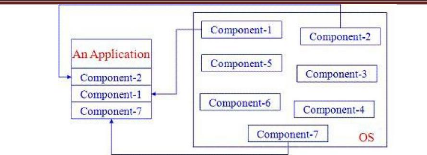
Figure III. 2: TinyOS : un ensemble de
composants logiciels
2.3 Propriétés de la plateforme TinyOS
TinyOS est basé sur des propriétés qui
font que ce système d'exploitation, s'adapte particulièrement
bien aux systèmes à faible ressources :
A.Disponibilité et sources: TinyOS est
un système principalement développé et soutenu par
l'université américaine de Berkeley, qui le propose en
téléchargement sous la licence BSD et en assure le suivi. Ainsi,
l'ensemble des sources sont disponibles pour de nombreuses cibles
matérielles.
B.Event-driven : Le fonctionnement d'un
système basé sur TinyOS s'appuie sur la gestion des
évènements se produisant. Ainsi, l'activation de tâches,
leur interruption ou encore la mise en veille du capteur s'effectue à
l'apparition d'évènements, ceux-ci ayant la plus forte
priorité.
Ce fonctionnement évènementiel (event-driven)
s'oppose au fonctionnement dit temporel (time-driven) où les actions du
système sont gérées par une horloge donnée.
C.Non préemptif: Le caractère
préemptif d'un système d'exploitation précise si celui-ci
permet l'interruption d'une tâche en cours. TinyOS ne gère pas ce
mécanisme de préemption entre les tâches, mais donne la
priorité aux interruptions matérielles. Ainsi, les tâches
entre elles ne s'interrompent pas mais une interruption peut stopper
l'exécution d'une tâche.
D.Pas de temps réel: Lorsqu'un
système est dit « temps réel » celui ci gère des
niveaux de priorité dans ses tâches, permettant de respecter des
échéances données par son environnement. Dans le cas d'un
système strict, aucune échéance ne tolère de
dépassement contrairement à un système temps réel.
TinyOS se situe au-delà de ce second type, car il n'est pas prévu
pour avoir un fonctionnement temps réel.
E.Langage: TinyOS a été
programmé en langage NesC que nous allons détailler
Chapitre 3 Description de l'architecture de la
plateforme TinyOS
Plus tard :
F.Consommation d'énergie : TinyOS a
été conçu pour réduire au maximum la consommation
en énergie du capteur. Ainsi, lorsqu'aucune tâche n'est pas
active, il se met automatiquement en veille.
2.4 Allocation de la mémoire
TinyOS a une empreinte mémoire très faible
puisqu'il ne prend que 300 à 400 octets dans le cadre d'une distribution
minimale. En plus de cela, il est nécessaire d'avoir 4 Ko de
mémoire libre qui se répartissent entre les différents
besoins suivant :
La pile : sert de mémoire temporaire, on
y empile et dépile les variables locales.
Les variables globales : réservent un
espace mémoire pour le stockage de valeurs pouvant être accessible
depuis des applications différentes.
La mémoire libre : pour le reste du
stockage temporaire.
Autres particularités, il n'y a pas d'allocation
dynamique de mémoire et pas de mécanisme de protection de la
mémoire, ce qui rend le système vulnérable à des
crashs ou des corruptions de mémoire.
2.5 Fonctionnement
Les composants déclarent des tâches, des
commandes ou des événements.
Les tâches sont des travaux de "longue
durée". Lors de l'appel d'une tâche, cette dernière est
ajoutée dans une file de type FIFO. Les tâches s'exécutent
dans l'odre de la file et en entier car TinyOS ne dispose pas de
mécanisme de préemption entre les tâches.
Les commandes sont des exécutions
d'une fonctionnalité précise dans un autre composant
Les événements sont les
équivalents logiciels aux interruptions matérielles, ils sont
prioritaires par rapport aux tâches et peuvent donc les interrompre.
Lorsque la file d'attente est vide, cela signifie qu'aucune
tâche n'est exécutée, et TinyOS met en veille le capteur,
afin d'économiser la batterie.
Chapitre 3 Description de l'architecture de la
plateforme TinyOS
2.6 Cibles possibles pour TinyOS
Il existe de nombreuses cibles possibles pour ce
système d'exploitation embarqué. Malgré leurs
différences, elles respectent toutes globalement la même
architecture basée sur un noyau central autour duquel s'articulent les
différentes interfaces d'entrée-sortie, de communication et
d'alimentation.
Mote, processeur, RAM et Flash : On appelle
généralement Mote la carte physique utilisant TinyOS pour
fonctionner. Celle-ci a pour coeur le bloc constitué du processeur et
des mémoires RAM et Flash. Cet ensemble est à la base du calcul
binaire et du stockage, à la fois temporaire pour les données et
définitif pour le système TinyOS.
Radio et antenne : TinyOS est prévu
pour mettre en place des réseaux sans fils, les équipements
étudiés sont donc généralement
équipés d'une radio ainsi que d'une antenne afin de se connecter
à la couche physique que constituent les émissions
hertziennes.
LED, interface, capteur : TinyOS est
prévu pour mettre en place des réseaux de capteurs, on retrouve
donc des équipements bardés de différents types de
détecteurs et autres entrées.
Batterie : Comme tout dispositif
embarqué, ceux utilisant TinyOS sont pourvus d'une alimentation autonome
telle qu'une batterie.
2.7 Ordonnancement
L'ordonnancement détermine l'ordre dans lequel les
tâches sont exécutées sur un CPU. Dans les systèmes
informatiques traditionnels, l'objectif d'un ordonnanceur est de minimiser la
latence, pour optimiser l'utilisation de la bande passante et des ressources,
et pour assurer l'équité. Le choix d'un algorithme
d'ordonnancement adapté aux réseaux de capteurs dépend
généralement de la nature de l'application. Pour les applications
ayant des exigences temps réel, un algorithme d'ordonnancement en temps
réel doit être utilisé. Pour d'autres applications, les
algorithmes d'ordonnancement non temps réel sont suffisants. Les
capteurs pour réseau sont utilisés dans des environnements
à la fois
Chapitre 3 Description de l'architecture de la
plateforme TinyOS
en temps réel et non temps réel, Le
système d'exploitation pour capteur en réseau doit fournir des
algorithmes d'ordonnancement qui répondent aux exigences des
applications. Par ailleurs, l'algorithme d'ordonnancement à un impact
sur la gestion de la mémoire et l'efficacité de la consommation
énergétique. Il existe deux catégories d'ordonnancement
des taches :
? l'ordonnancement en temps réel
Ce mode de fonctionnement permet de répondre aux
besoins d'application en temps réel pour la surveillance d'environnement
de manière périodique
? l'ordonnancement en temps partagé
L'ordonnancement des tâches en mode
événementiel, convient pour des évènements
asynchrones
2.8 Tâches, événements et
applications
TinyOS est basé sur la gestion de tâches et
d'événements. Une tâche est un bloc d'instruction, un
événement est l'équivalent logiciel d'une interruption
matérielle et a priorité sur les tâches. Chaque tâche
est activées ou interrompue en fonction de l'apparition d'un
'événement et TinyOS n'étant pas préemptif les
tâches ne peuvent pas s'interrompre entre elles, mais peuvent
l'être par un événement.
Gestion des tâches
Chaque tâche active est mise en attente dans une file
d'attente de type FIFO (First In First Out : première arrive
première sortie), lorsque la file des tâches est vide le
système se met en veille en attendant le prochain
événement. Ce mécanisme de tâches a pour avantage
d'empêcher une tâche d'en interrompre une autre, pouvant bloquer le
système, mais il a aussi pour inconvénient de ne pas permettre
une gestion en temps réel.
Pour les tâches de longue durée TinyOS
possède un mécanisme permettant de fragmenter l'exécution
d'une tâche nomme split-phase qui permet de ne pas bloquer le
système. Ce mécanisme est utilise dans l'initialisation de
composants qui demandent du temps au démarrage, comme la radio par
exemple.
Les Evénements
Lorsqu'une interruption matérielle a lieu,
l'événement correspondant reçoit un signal et prend la
main de manière asynchrone, c'est à dire qu'il n'attend pas la
fin de la
Chapitre 3 Description de l'architecture de la
plateforme TinyOS
tache courante pour s'exécuter. Des
événements peuvent être Signalés ne correspondant
pas directement a une interruption matérielle. Il existe
également des événements synchronises : ils sont mis en
attente dans la liste des tâches, avec une priorité
supérieure aux tâches en attente mais n'interrompent pas la
tâche courante (cas de certains Timers).
Les applications basées sur TinyOS sont formées
de composants réutilisables et portables, (comme les Timers, les
convertisseurs de signal ou la radio) qui sont relies entre eux. Ces composants
peuvent être directement lies au matériel (composant gérant
les LED par exemple) ou un regroupement de plusieurs composants de bas niveau
(composants gérant les envois de données par la radio). Les
composants sont implémentés en utilisant les tâches, les
événements et des commandes qui permettent de faire appel aux
fonctions n'alitent d'autres composants auxquels ils sont lies. Exemple
d'application
Une application devant mesurer la température d'une
pièce régulièrement et transmettre les données
à un ordinateur utilisera plusieurs composants :
- un composant de mesure de température
- un composant qui se chargera de l'envoi des données par
le port USB
- un composant de mesure du temps
- un composant de gestion des LED pour afficher la
fréquence des mesures
2.9 Package TinyOS
TinyOS est prévu pour fonctionner sur une multitude de
plateformes, disponibles dès l'installation, TinyOS peut être
installé à partir d'un environnement Windows (2000 et XP) ou bien
GNU/Linux (Red Hat essentiellement, mais d'autres distributions sont
également possibles). Deux principales versions de TinyOS sont
disponibles : la version stable (v. 1.1.0) et la version actuellement en cours
de tests (v.1.1.15); la première présente moins de risques mais
est nettement moins récente.
Windows : un guide propose l'installation de tous les
principaux outils nécessaires au bon fonctionnement du système,
notamment Cygwin (couche d'émulation de l'API Linux) qui permet d'avoir
une interface Unix sous Windows. Le JDK Java 1.4 de Sun est nécessaire
an d'exécuter la procédure d'installation.
GNU/Linux : des packages RPM sont proposés au
téléchargement, un guide explique la marche à suivre. Les
distributions Linux ayant un autre gestionnaire de paquet peuvent
Chapitre 3 Description de l'architecture de la
plateforme TinyOS
utiliser un programme (comme Alien) pour installer les packages,
ou compiler directement à partir des sources. Le JDK de IBM est
nécessaire.
Par la suite, des packages supplémentaires peuvent
être ajoutés en passant par le site Source Forge, qui met à
disposition le code open source de TinyOS et d'un ensemble de programmes
dédiés.
3. Description du langage NesC
Il doit exister un environnement de développement logiciel
afin d'importer des applications sur les capteurs. Le langage utilisé
pour le développement dans TinyOS est le nesC.

Figure III. 3:symbole de langage
NesC
3.1 Présentation
Le langage NesC a une architecture basée sur des
composants. Cela permet de réduire la taille mémoire du
système et de ses applications, chaque composant correspondant à
un élément matériel du type LED ou timer par exemple. Les
composants peuvent être réutilisés dans n'importe quelle
application. L'implémentation des composants, dans le but
d'élaborer des applications, s'effectue en déclarant des
tâches, des commandes ou des évènements.
Les tâches sont utilisées pour effectuer la
plupart des blocs d'instruction d'une application. A l'appel d'une tâche,
celle-ci va prendre place dans une file d'attente de type FIFO pour y
être execute.
3.2 Concepts principaux dans NesC
Application: un ou plusieurs composants
reliés ensemble pour former un exécutable Composant
: un élément de base pour former une application nesC.
Il existe deux types de composants: modules et configurations
V' Module : composant qui implémente une
ou plusieurs interfaces
V' Configuration : composant qui relie d'autres
composants ensemble
Chapitre 3 Description de l'architecture de la plateforme
TinyOS
Interface : définie d'une manière
abstraite les interactions entre deux composants
3.3 Développement
Les interfaces spécifient un ensemble de fonctions,
appelées commandes, qui doivent être implémentées
par le fournisseur de l'interface et un ensemble de fonctions, appelées
évènements, qui doivent être implémentées par
l'utilisateur de l'interface. Afin de distinguer les fonctions concernant un
évènement de celles concernant une commande, les en-têtes
des fonctions sont précédés des mots-clés
respectifs event ou command. Voici un exemple simple
d'interface :
interface Timer {
command result_t start(char type, unit32_t
interval): command result_t stop();
event result_t fired();
}
TinyOS n'autorise pas les pointeurs de fonctions. Afin de
néanmoins proposer un mécanisme alternatif, NesC utilise des
interfaces paramétrées. Celles-ci permettent à
l'utilisateur de créer un ensemble d'interfaces identiques et d'en
sélectionner une seule à appeler grâce à un
identifiant.
interface SendMsg[unit8 t id]
Dans la pratique, NesC permet de déclarer deux types de
fichiers: les modules et les Configurations. Les configurations, permettent de
décrire les composants composites c'est-à-dire des composants
composés d'autres composants c'est à dire de granularité
supérieure. Une configuration permet donc de décrire
l'architecture. Une configuration est donc constituée de modules et/ou
d'interfaces ainsi que de la description des liaisons entre ces composants.
configuration NonModule {}
implementation {
//liste des modules et configurations utilises, ex :
components Main,Modulel ModuleN,Configl,
,ConfigiM ;
//descriptifs des liaisons
//Interface fournie <- Interface requise ou //Interface
requise -> interface fournie, ex : Main.StdControl -> Modulel.StdControl
; }
Chapitre 3 Description de l'architecture de la plateforme
TinyOS
Détaillons ici, quelques caractéristiques
concernant les configurations. La première d'entre elles concerne une
simplification. Lors du descriptif des liaisons, il est en effet possible de ne
pas préciser l'interface fournie par un module. Dans ce cas, elle
possédera le même nom que celle requise. L'autre
caractéristique concerne le composant Main. En effet, il est à
noter que ce composant est obligatoirement présent dans la configuration
décrivant l'ensemble de l'application car son rôle est de
démarrer l'exécution de l'application.
Les modules sont eux les éléments de base de la
programmation. Ils permettent en effet d'implémenter les composants et
sont stockés dans un fichier possédant la structure suivante :
module NomModuleM {
provides {
//liste des interfaces fournies, ex : interface
NominterfaceFourniel ; I
uses {
//liste des interfaces requises, ex :
interface NomlnterfaceRequisel ;
I
I
implimentation {
//déclarations des variables, ex :
int state ;
//implementations des fonctions décrites par les
interfaces fournies :
}
3.4 Types des données
Les types de données qui peuvent être
utilisés en NesC sont tous ceux que fournit le langage C standard plus
quelques autres qui n'apportent pas de puissance de calcul mais qui sont
très utiles pour la construction de paquets puisqu'ils fournissent
à l'utilisateur le nombre de bits qu'ils occupent (ceci est important au
moment de la
Chapitre 3 Description de l'architecture de la
plateforme TinyOS
transmission des informations par l'intermédiaire des
ondes radio). Ces types additionnels sont :
- uint16_t : entier non signé sur 16 bits.
- uint8_t : entier non signé sur 8 bits.
- result_t : utilisé pour savoir si une fonction a
été exécuté avec succès ou non, c'est comme
un booléen mais avec les valeurs SUCCESS et FAIL. (Retour de fonction) -
bool : valeur booléenne qui peut être TRUE ou FALSE.
En NesC il est possible de faire une utilisation dynamique de
la mémoire mais ce n'est pas très recommandé (à
moins que cela ne soit absolument nécessaire). Pour pouvoir l'utiliser
il existe un composant spécial appelé MemAlloc qui permet une
gestion dynamique de la mémoire [6].
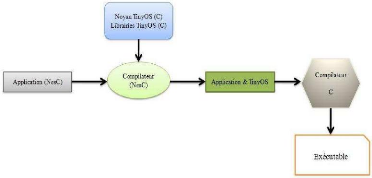
3.5 Compiler et exécuter une application nesC
La première étape de ce processus consiste
à compiler les fichiers nécessaires à l'application et au
système d'exploitation. Celle-ci est réalisée via le
compilateur NesC fourni par TinyOS. Son rôle est premièrement de
transformer les fichiers NesC en fichier C et deuxièmement d'y
intégrer les fichiers du noyau de TinyOS. Ce qui permet d'obtenir un
fichier source C unique. Une fois cette étape accomplie, il ne reste
alors qu'à utiliser un compilateur C traditionnel qui va utiliser le
fichier précédemment créé afin de
générer une application exécutable. Celle-ci sera donc
constituée par la «fusion» du système d'exploitation et
du code applicatif. Ces différentes phases peuvent être
synthétisées comme l'illustre la figure 3.4 Pour effectuer une
compilation, les fichiers doivent se situer dans le même
répertoire contenant aussi un makefile.
Chapitre 3 Description de l'architecture de la
plateforme TinyOS
Figure III. 4: Etapes de compilation d'une
application sous TinyOS
4. Conclusion
Le système TinyOS est un système
embarqué, dédié spécialement pour les
réseaux de capteurs, qui présente un environnement de calcul
particulier soumit a plusieurs contraintes tel que l'énergie, l'espace
mémoire, etc.
TinyOS permet le développement d'application
simplifiée par la mise en relation de composants cibles, tout en offrant
des primitives ainsi que des bibliothèques réseaux qui le rondent
complet. Il est classé parmi les systèmes temps réel,
préemptif, événementiel.
Dans le chapitre suivant, nous allons implémenter,
analyser un algorithme de localisation nommé DV-Hop pour les RCSF dans
la plate forme TinyOS en utilisant le
langage NesC.
Chapitre 4
Implémentation et
Evaluation de
L'Algorithme de
Localisation DV-Hop
Chapitre 4 Implémentation et Evaluation de
DV-Hop
1. Introduction
Avant sa mise en place, le déploiement d'un
réseau de capteurs nécessite une phase de simulation, afin de
s'assurer du bon fonctionnement de tous les dispositifs. En effet, pour de
grands réseaux le nombre de capteurs peut atteindre plusieurs milliers
et donc un coût financier relativement important. Il faut donc
réduire au maximum les erreurs de conception possibles en
procédant à une phase de validation.
Dans ce chapitre, nous allons en premier lieu,
présenter la plate-forme logicielle que nous avons utilisée pour
les simulations TOSSIM, ensuite, nous allons présenter les contextes de
simulation et les résultats pour le protocole de localisation
étudié avec discussion de résultat.
2. Simulateur de réseaux de capteur
2.1 Définition
Afin d'évaluer les protocoles de localisation, TOSSIM a
été utilisé.TOSSIM est le simulateur de TinyOs. Il permet
de simuler le comportement d'un capteur (envoie/réception de messages
via les ondes radios, traitement de l'information, etc...) au sein d'un
réseau de capteurs. Pour une compréhension moins complexe de
l'activité d'un réseau, TOSSIM peut être utilisé
avec une interface graphique, TinyViz, permettant de visualiser de
manière intuitive le comportement de chaque capteur au sein du
réseau.
2.2Description
a.TinyViz
TinyViz est une interface graphique Java. Elle permet de
donner un aperçu des capteurs à tout instant ainsi que des divers
messages qu'ils émettent. Elle détermine un délai entre
chaque itération des capteurs afin de permettre une analyse pas à
pas du bon déroulement des actions en activant différents modes
comme Radio, CPU, etc. [15]
Chapitre 4 Implémentation et Evaluation de
DV-Hop
b. PowerTOSSIM
Le simulateur TOSSIM n'a pas la capacité de
vérifier le taux d'énergie dissipée pendant
l'exécution des applications. Cependant, le besoin de vérifier la
consommation énergétique dans un RCSF a un intérêt
primordial. L'université de Harvard a conçu le simulateur
PowerTOSSIM qui surmonte ce problème. Ce nouveau simulateur est
intégré dans TOSSIM. Il permet de générer un
fichier de l'extension .trace qui enregistre les
détails de la simulation comme l'énergie consommée dans le
réseau. [16]
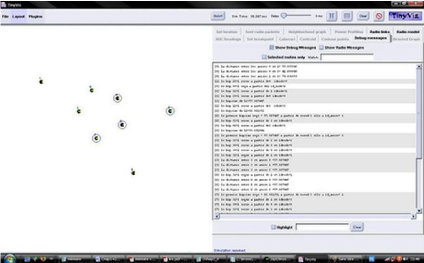
Figure IV. 1: Fenêtre graphique
TinyViz de notre application
3. Estimation des coordonnées
DVHOP est un algorithme de localisation. Son but est de
permettre aux capteurs de trouver leurs positions à l'aide des positions
connues de quelques capteurs spécifiques appelés (ancres).
En plus, la localisation par moyens propres est donc
indispensable. Elle se fait en deux étapes : premièrement
l'estimation de la distance aux autres noeuds, et deuxièmement la
multilatiration.
Chapitre 4 Implémentation et Evaluation de
DV-Hop
Noeud
Ancre
Figure IV. 2: Figure représentant le
modèle réel.
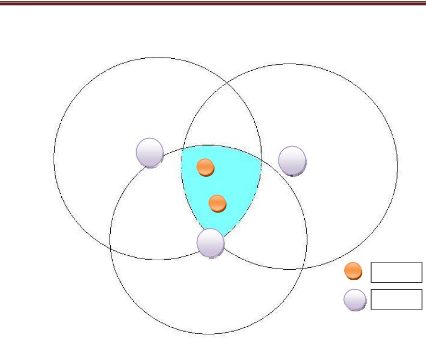
Figure IV.2 illustre un modèle de réseaux des
capteurs sans fil en utilisant la méthode de multilatiration pour
estimer les positions des noeuds, les boules violées représentent
les ancres (leur position est connue) et les oranges représentent les
noeuds (leur position est inconnue).
Les cercles représetnent les zones de couvertures des
ancres, pour que l'erreur d'estimation soit minimale, il faut placer les noeuds
dans la zone d'intersection des cercles (zone bleu)
A- Estimation de la distance
L'estimation de distance peut se faire sur base de
différents indicateurs :
? Le temps de propagation d'une onde.
? La puissance du signal à la réception.
? Le taux d'erreurs corrigées lors des transmissions.
? Le nombre de saut.
Chapitre 4 Implémentation et Evaluation de
DV-Hop
B- Multilatération
La Multilatération est une méthode relativement
simple et intuitive, en utilisant plus que trois points de
référence (ancres). La position d'un noeud est calculée en
connaissant les positions d'un certains ancres et les distances estimées
de ce noeuds aux différents ancres.nous formons le système
suivant :
Soit une cible a dont on veut trouver la position Xa, et soit m
ancres i dont
nous connaissons les positions xi, 1 < i <m,
Nous
supposons que nous connaissons aussi une estimation des distances Dai 1
< i <m entre chaque ancre i et le noeud a.
Nous pouvons alors poser :
(x11 - xa1)2 + (x12 - xa2)2 + . . . + (x1p
- xap)2 = d21a ...
(xm1 - xa1)2 + (xm2 - xa2)2 + . . . + (x1p
- xap)2 = d2 ma
Le système peut être linéaire en soustrayant
la dernière équation des m - 1 équations
précédentes.
x2 11 - x2 m1 - 2(x11 - xm1)xa1
+x2 12 - x2 m2 - 2(x12 - xm2)xa2
+. . .
+x21p - x2 mp - 2(x1p - xmp)xap = d2 1a - d2
ma
...
...
x2(m-1)1 - x2 m1 - 2(x(m-1)1 - xm1)xa1
+x2(m-1)2 - x2 m2 - 2(x(m-1)2 - xm2)xa2
+. . .
+x2(m-1)p - x2 mp - 2(x(m-1)p - xmp)xap =
d2(m-1)a - d2 ma
En réordonnant les termes, nous obtenons un système
d'équations linéaires de la forme Ax = b où :
2(x11 - xm1) . . . 2(x1p - xmp)
Chapitre 4 Implémentation et Evaluation de
DV-Hop
...
2(x(m-1)1 - xm1) . . . 2(x(m-1)p - xmp)
x2 11 - x2 m1 + . . . + x2 1p - x2 mp + d2 ma - d2 1a
B= ...
...
x2 (m-1)1 - x2 m1 + . . . + x2 (m-1)p - x2 mp + d2 ma - d2
(m-1)a
Comme nous avons des erreurs dans les estimations de
distances, nous ne pouvons pas trouver de solution exacte à ce
système d'équationsEt donc :
Xa = = (ATA)
-1ATb.
xa1
xa2
Où xa=
C'est-à-dire notre estimation de la position du noeud
a.
xap
Le processus peut être recommencé avec tous les
noeuds inconnus du réseau. Nous obtenons ainsi les positions de tous les
noeuds dans le réseau. Cette méthode sera
implémentée par Delphi.
4. Objectifs et métriques de la simulation
Le but général de ce chapitre est
d'implémenter et d'analyser DVHOP (détaillé en chapitre 2)
un algorithme de localisation sur les réseaux de capteurs sans fil en
particulier:
? Evaluer la précision de la
localisation.
Ces métriques sont évaluées en fonction du
nombre de noeuds ordinaires dans le réseau ainsi que le nombre des
ancres.
Cette formule représente la précision de
localisation de l'algorithme lors d'estimation des distances entre les noeuds
et les ancres. Nous supposons que
Chapitre 4 Implémentation et Evaluation de
DV-Hop
nous connaissons également les vraies positions des
noeuds. La précision d'un noeud Ni est calculée comme suivant:
Erreur totale= *100% [13]
Tel que :
Xr, Yr : les positions réelles d'un noeud.
Xi, Yi : les positions d'un noeud trouvées par
DV-hop.
N : le nombre des noeuds ordinaires.
Erreur Ni : l'erreur d'un noeud
Erreur totale: la Moyenne d'erreur de tous les noeuds de
réseau
? La consommation d'énergie.
Ces métriques sont évaluées en fonction
de la taille du réseau
(changement du nombre de noeuds dans le réseau).
5. Version amélioré de DV-hop (Improved
DV-hop )
Le même principe pour la version DV-hop, cependant, on
recalcule les distances entre les noeuds et les ancres, si un noeud
reçoit un hop inférieur à l'ancien hop du même
ancres [14]
6. Résultat de la simulation
6.1 La métrique précision de
localisation
Cette évaluation montre l'efficacité de la phase de
calcule de distance entre chaque noeuds avec tous les autres ancres.
Le but est de savoir la précision de localisation d'un
noeud par rapport à sa position exacte.
La précision de la localisation est évaluée
en fonction de deux paramètres : le nombre de noeuds ordinaires et le
nombre des ancres.
On a utilisé deux versions d'algorithme : la
première est la version basique DV-hop et la
deuxième est la version ameliorée IDV-hop
a. Erreur d'estimation pour la version basique
Scénario 1
Chapitre 4 Implémentation et Evaluation de
DV-Hop
En fonction de densité des noeuds ordinaires, on a obtenu
les résutats suivants avec une topologie constitué en 3 ancres et
5 puis 10 puis 20 noeuds ordinaires
|
Nombre de noeuds
|
5
|
10
|
20
|
|
Erreur (%)
|
54.08
|
50.26
|
34.57
|
Tableau IV. 1: précision de
l'algorithme dvhop en foction de densité de noeuds
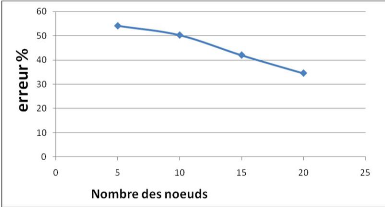
Figure IV. 3: estimation d'erreur de localisation en
fonction de nombre des noeuds Observation et discussion : On remarque
clairement dans le graphe de la
Figure IV.1, que l'errer diminue lorsque le nombre des noeuds
ordinaires augmente. Ceci s'explique par le fait que algorithme DVHOP n'est pas
adapté pour un réseau qui contient un grand nombre de noeuds.
Scénario 2
En fonction de densité des ancres, on a obtenu les
résutats suivants avec une topologie constituée en 5 noeuds et 3
ancres puis 4, 5, 6 et 7 ancres
|
Nombre d'ancres
|
3
|
4
|
5
|
6
|
7
|
|
Erreur (%)
|
54.08
|
40.1
|
36.71
|
30
|
24.73
|
Tableau IV. 2: précision de
l'algorithme dvhop en foction de densité d'ancres
Chapitre 4 Implémentation et Evaluation de
DV-Hop
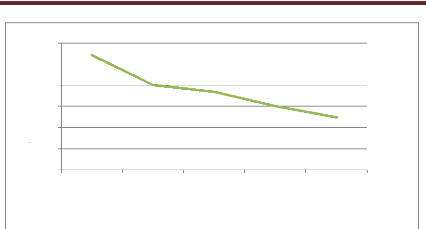
3 4 5 6 7
60
50
erreur %
40
30
20
10
0
Nombre des ancres
Figure IV. 4: estimation d'erreur de localisation en
fonction de nombre des ancres
Observation et discussion :
On remarque clairement dans le graphe de la Figure IV.2, que
l'erreur diminue lorsque le nombre des ancres augmente car dans
la
phase de multilateration, la zone d'intersection des cercles
qui
representent les zones de couvertures, va dimunuer et les
coordonnées X et Y sont inclus dans cette zone, donc l'erreur va
dimunuer.
b. Erreur d'estimation pour la version ameliorée
Scénario 1
En fonction de densité des noeuds ordinaires, on a obtenu
les résutats suivants avec une topologie constituée de 3 ancres
et 5 puis 10 puis 20 noeuds ordinaires
|
Nombre de noeuds
|
5
|
10
|
20
|
|
Erreur (%)
|
30.22
|
27.31
|
23.76
|
Tableau IV. 3: Précision de
l'algorithme dvhop en foction de densité de noeuds
Chapitre 4 Implémentation et Evaluation de
DV-Hop
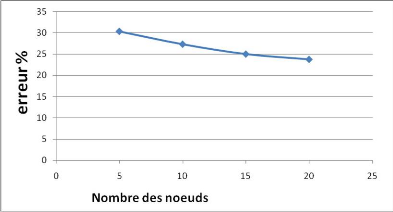
Figure IV. 5 : estimation d'erreur de localisation en
fonction de nombre de noeuds
Observation et discussion : On remarque
clairement dans le graphe de la Figure IV.3, que l'errer diminue lorsque le
nombre des noueds ordinaires augmente. Ceci s'explique par le fait que
algorithme DVHOP n'est pas adapté pour un réseau qui contient un
grand nombre de noeuds.
Scénario 2
En fonction de la densité des ancres, on a obtenu les
résutats suivants avec une topologie constituée en 5 noeuds et 3
ancres puis 4, 5, 6 et 7 ancres.
|
Nombre d'ancres
|
3
|
4
|
5
|
6
|
7
|
|
Erreur (%)
|
30.22
|
27.33
|
24.45
|
23.25
|
22.15
|
Tableau IV. 4: précision de
l'algorithme IDV-hop en foction de la densité d'ancres
Chapitre 4 Implémentation et Evaluation de
DV-Hop
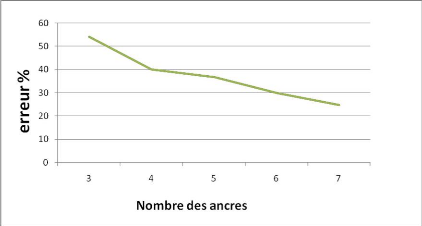
Figure IV. 6: estimation d'erreur de localisation en
fonction de nombre des ancres
Observation et discussion : On remarque
clairement dans le graphe de la Figure IV.4, que l'erreur diminue lorsque le
nombre des ancres augmente, car dans la phase de multilateration la zone
d'intersection des cercles qui representent les zones de couvertures va
dimunuer et les coordonnées X et Y sont inclues dans cette zone, donc
l'erreur va dimunuer
c. compraison entre DV-hop et IDV-hop en fonction
d'erreur d'estimation
En fonction de la densité des ancres, on a obtenu les
résutats suivants avec une topologie constituée en 3 ancres et 5
puis 10 puis 15 puis 20 noeuds ordinaires en utilisant le matlab, on a obtenu
les courbes suivantes
Chapitre 4 Implémentation et Evaluation de
DV-Hop
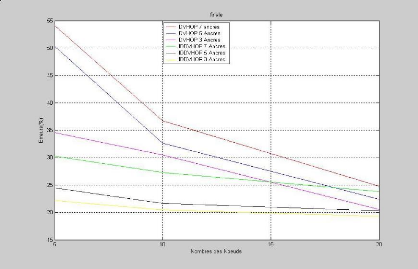
Figure IV. 7 :
Observation et discussion : on remarque
clairement dans le graphe de la Figure IV.,
que l'erreur diminue lorsque le nombre des ancres ou le nombre de
noeuds ordinaires augmente. On remarque aussi que l'erreur dans le IDV-hop est
moins que le DV-hop soit en fonction de nombre de noeuds ordinaire ou de nombre
d'ancre.
En effet, pour que l'erreur d'estimation soit minimale, il faut
utiliser le IDV-hop avec un nombre important d'ancres.
6.2. La métrique de consommation
d'énergie
Pour évaluer cette métrique, on a utilisé
pour chaque simulation les paramètres de configuration propres aux
réseaux de capteurs du tableau 4.2:
|
IDV-hop
|
Dvhop
|
Nombre d'ancres
|
|
11.35
|
11,23
|
3
|
|
|
4
|
|
|
5
|
|
|
6
|
|
|
7
|
Tableau IV. 5 :
Chapitre 4 Implémentation et Evaluation de
DV-Hop
Observation et discussion :
A partir du graphe de la Figure 4., on remarque que
l'énergie totale consommée augmente avec l'augmentation de
nombres de noeuds dans le réseau. L'augmentation d'énergie totale
consommée est expliquée par l'augmentation de nombre de noeuds en
échangeant de différents messages entre eux. On constate aussi
que l'énergie consommée dans IDV-hop est
légèrement supérieure à celle du DV-hop ;
cela est dû au fait que dans IDV-hop, un noeud fait plus
d'emmision /réception des messages par rapport au DV-hop.
7. Conclusion
Dans ce chapitre, nous avons présenté
l'environnement de simulation avec lequel nous avons travaillé :
simulateur TOSSIM et sa caractéristique.
Ensuite, on a décrit en détail le protocole de
localisation DV-hop ainsi que sa version améliorée IDV-hop
où le but a été d'étudier et d'évaluer
leurs performances sous deux métriques à savoir :
L'erreur de localisation ainsi que l'énergie totale
consommée par ses derniers.
Nous avons également défini les paramètres
de simulation ainsi que les métriques d'évaluation prise en
compte dans notre étude.
Par ailleurs, nous avons constaté que l'alogorithme de
localisation IDV-hop plus efficace que DV-hop en terme de précision de
localisation mais il consomme plus d'energie
Conclusion générale
Les réseaux de capteurs sans fil (RCSFs) sont une nouvelle
technologie qui a surgit après les grands progrès technologiques
concernant le développement des capteurs intelligents capables de
detecter des évenements et de préciser sa position,
c'est-à-dire la localisation.Plusieurs recherches qui ont
été faites pour la conception de l'algorithme tiennent compte de
cette contrainte et en plus minimisent la consommation d'énergie.
En effet, c'est dans le cadre de ce thème que s'oriente
l'objectif de notre projet de fin d'étude.
Dans ce projet, nous avons donné un aperçu sur les
réseaux de capteurs et
présenté certaines de leurs applications. Nous
avons aussi exposé les différents défis qui doivent
surmonter la conception des protocoles de communication dans ces
réseaux. Nous nous sommes intéressés aux protocoles
liés à la localisation, et en particulier DV-hop et sa version
améliorée IDV-hop.
Dans ce projet nous avons étudié les deux
algorithmes de localisation dans les RCSFs (DV-hop, IDV-hop) dans le
but de faire une comparaison entre eux à l'aide de simulateur
TOSSIM.
Après avoir effectué plusieurs simulations et
analysé les résultats obtenus, nous avons constaté que le
DV-hop est plus précis que le IDV-hop . En
effet, en augmentant le nombre de noeuds dans le réseau,on
obtient des resultats plus
précis ,donc ils introduisent un lourd surcoût de
communication ce qui entraîne une consommation
d'énergie très importante.
Comme perspective, il serait très intéressant de
joindre les avantages des
algorithmes range-based en terme de précision aux
algorithmes range-free. Par exemple rajouter le RSSI à l'algorithme
DVHOP afin de minimiser l'erreur de précision tout en gardant sa
simplicité. Une bonne hybridation permettra d'avoir un algorithme de
géolocalisation
ayant comme avantage une meilleure précision, à
moindre coût.
|
Chapitre 4 Implémentation et Evaluation de
DV-Hop
Chapitre 4 Implémentation et Evaluation de
DV-Hop
Chapitre 4 Implémentation et Evaluation de
DV-Hop
Chapitre 4 Implémentation et Evaluation de
DV-Hop
Chapitre 4 Implémentation et Evaluation de
DV-Hop
Chapitre 4 Implémentation et Evaluation de
DV-Hop
Annexe1
Code source de notre application :
//Développeurs Rais Hichem & Mekidiche Mohamed
//cet algorithme traite 3 ancres (les ancres sont 0 et 1 et 2) et
n noeuds tq n>=1
//lancer le shell et taper les cammandes suivantes
// cd /opt/tinyos-1.x/apps/dvhop3_n pour accéder
au
répertoire qui contient notre application
//make pc pour compiler l'application
//export DBG=usr1 pour afficher notre message
//export
PATH="$TOSROOT/tools/java/net/tinyos/sim:$PATH"
//TinyViz -run build/pc/main.exe 8 pour lancer la
simulation
avec 8 noeuds
//cliquer sur le menu "Layout" puis "file load" et
sélectionner un fichier qui prend l'extention ".mps" (c'est une
topologie déja créée)
//pour un capteur qui envoie des messages seulement aux capteurs
qui ont dans sa zone de couverture: cliquer sur le menu plugins et
sélectionner "radio Model" puis décocher "out edges" puis cliquer
sur "update"
//cocher debug messages dans le menu plugins pour visualiser les
messages
includes DvhopMsg;//appler le fichier DvhopMsg.h qui contient la
structure de notre message
module DVhopM {
provide interface StdControl;//interface fournie
//interface utilisée
uses {
interface Timer;
interface Leds;
interface SendMsg as envoiMsg;
interface ReceiveMsg as RecoieMsg;
}
}
implémentation
{
float premier_hop_arriver;
DVhopMsg * pemission;//pointeur sur le message emis
DVhopMsg * poi;//pointeur sur le message reçu
TOS_Msg msg;//message emis
int hop[3][2];//tableau utilisé par chaque ancre pour
stoquer les hop d'autres ancres
bool ancre_recu[3][2];//tableau des boolean chaque ancre
reçoit les hop d'autre ancres
DVhopMsg * p;//pointeur sur le message emis aprés la
réception d'un message
bool noeud_reçu_avant[3];//par exemple si un noeud
reçoit un
message d'ancre 1 neud_reçu_avant[1] devient true(avant
de
calculer le hopsize)
bool affiche1,v,vv,vvv,r;//variable utilser pour afficher un
message une seule fois
float tab[3][2];//tableau pour stoquer les x et les y des
ancres
float hopsize[3];//tableau pour stoquer les hopsizes
int hop_noeud[3];//tableau utiliser par les noeuds pour
stoquer les hop des ancres
float L1L2,L0L2,L0L1;//les distances entre les ancres
int i,j,k;
bool neud_recu_apres[3];//par exemple si une noeud recoi un
message d'ancre 1 neud_recu_apres[1] devient true(apres de
calculer le hopsize)
command result_t StdControl.init() {
// initialisation des noeuds
pemission =( DVhopMsg* ) msg.data;// pointer sur le
message emis qui est de type TOS_Msg sur le champs data
switch(TOS_LOCAL_ADDRESS) {
case 0 : //si l'adreese du capteur=0 (TOS_LOCAL_ADDRESS=0)
pemission->id_ancre = 0; pemission->hop =0;
pemission->x = 81.75;
pemission->y = 41;
pemission->id_node=TOS_LOCAL_ADDRESS; pemission->hopsize=
0; break;
case 1 : //si l'adreese du capteur=1
(TOS_LOCAL_ADDRESS=1)
pemission->id_ancre = 1; pemission->hop =0;
pemission->x = 16.54; pemission->y = 33.01;
pemission->id_node=TOS_LOCAL_ADDRESS; pemission->hopsize=
0;
break;
case 2 : //si l'adreese du capteur=2 (TOS_LOCAL_ADDRESS=2)
pemission->id_ancre =2;
pemission->hop =0;
pemission->x = 47.76;
pemission->y = 66.02;
pemission->id_node=TOS_LOCAL_ADDRESS;
pemission->hopsize= 0;
break;
default: pemission->id_node=TOS_LOCAL_ADDRESS;
pemission->id_ancre =100;// les autres noeuds prends la
valeur 100 par exemple
pemission->hopsize= 0;
call Leds.init(); return SUCCESS;
}
}

command result_t StdControl.start() {
v=TRUE;vv=TRUE;vvv=TRUE;
//stocker les x et les y des ancres dans un tabeau
tab[0][0]=81.75;
tab[0][1]=41;
tab[1][0]=16.54; tab[1][1]= 33.01;
tab[2][0]=47.76; tab[2][1]=66.02;
//le calcule des distances entres les ancres
L0L1= sqrt(pow((tab[0][0]-tab[1][0]),2)+
pow((tab[0][1]-tab[1][1]),2));
L0L2= sqrt(pow((tab[0][0]-tab[2][0]),2)+
pow((tab[0][1]-tab[2][1]),2));
L1L2= sqrt(pow((tab[1][0]-tab[2][0]),2)+
pow((tab[0][1]-tab[2][1]),2));
if(TOS_LOCAL_ADDRESS==0){
dbg(DBG_USR1, "La distance entre les ancres 0 et 1=
%f\n",L0L1);
dbg(DBG_USR1, "La distance entre les ancres 0 et 2=
%f\n",L0L2);
dbg(DBG_USR1, "La distance entre les ancres 1 et 2=
%f\n",L1L2);
}
for(i=0;i<=2;i++) for(j=0;j<2;j++)
ancre_recu[i][j]=FALSE;
for(i=0;i<=2;i++){ neud_recu_avant[i]=TRUE;
neud_recu_apres[i]=FALSE;
}
affiche1=TRUE;
k=0;r=FALSE;
premier_hop_arriver=0;
call Timer.start(TIMER_REPEAT, 2000);// envoyer un
message apres chaque 2 secondes
return SUCCESS;
}
command result_t StdControl.stop() { call Timer.stop();
return SUCCESS;
}
event result_t envoiMsg.sendDone(TOS_MsgPtr sent, result_t
success) {
call Leds.redOff();
return SUCCESS;
}
event result_t Timer.fired() {
atomic {
if( k<15){
k=k+1;
//dbg(DBG_USR1, "bien envoyer\n");
if (call envoiMsg.send(TOS_BCAST_ADDR, sizeof( DVhopMsg),
&msg)== SUCCESS)
{
call Leds.yellowToggle(); }else {call Leds.redToggle();
dbg(DBG_USR1, "echec\n");
}
}
}
return SUCCESS;
}
event TOS_MsgPtr RecoieMsg.receive(TOS_MsgPtr m) {
// reception d'un message
call Leds.greenToggle();
atomic {
poi = (DVhopMsg*) m->data;// pointeur sur le message
reçu
p =( DVhopMsg* ) msg.data;// pointeur sur le message emis
switch(TOS LOCAL ADDRESS) {
_
_
case 0 :
atomic{
if( (ancre_recu[0][0]==FALSE) && (poi->id_ancre==1)
){//si
l'ancre 0 reçoit un message d'ancre 1
ancre_recu[0][0]=TRUE;
hop[0][0]=poi->hop+1;
dbg(DBG_USR1, "le hop 00=%d reçu a partir de%d
id_node=%d\n", hop[0][0],poi->id_ancre,poi->id_node);
}
else if( (ancre_recu[0][1]==FALSE)
&&(poi>id_ancre==2)){ //si l'ancre 0 reçoit
un message
d'ancre 2
ancre_recu[0][1]=TRUE;
hop[0][1]=poi->hop+1;
dbg(DBG_USR1, "le hop 01=%d recue a partir de%d idnode=%d\n",
hop[0][1],poi->id_ancre,poi->id_node); }
if( (ancre_recu[0][0]==TRUE)
&&(ancre_recu[0][1]==TRUE)&& (v==TRUE)){//si l'ancre 0
reçoit un message d'ancre 1 et 2 alors on calcule le hopsize
v=FALSE;
hopsize[0]=((L0L1+L0L2)/(hop[0][0]+hop[0][1]));
dbg(DBG_USR1, "le hopsize de L0=%f\n",hopsize[0]);
//envoyer un broadcast avec les info suivants
p->hopsize= hopsize[0];
//p->hop=0;
p->id_ancre=0;
for(i=0;i<12;i++)
if (call envoiMsg.send(TOS_BCAST_ADDR, sizeof( DVhopMsg),
&msg)== SUCCESS)
call Leds.redOn();
}
}
break;
case 1 :
atomic{
if( (ancre_recu[1][0]==FALSE) && (poi->id_ancre==0)
){
ancre_recu[1][0]=TRUE;
hop[1][0]=poi->hop+1;
dbg(DBG_USR1, "le hop 10=%d recue a partir de %d
idnode=%d\n", hop[1][0],poi->id_ancre,poi->id_node);
}
else if( (ancre_recu[1][1]==FALSE)
&&(poi->id_ancre==2)){ ancre_recu[1][1]=TRUE;
hop[1][1]=poi->hop+1;
dbg(DBG_USR1, "le hop 11=%d recue a partir de%d idode=%d\n",
hop[1][1],poi->id_ancre,poi->id_node);
}
if( (ancre_recu[1][0]==TRUE)
&&(ancre_recu[1][1]==TRUE)&& (vv==TRUE)){
vv=FALSE;
hopsize[1]=((L0L1+L1L2)/(hop[1][0]+hop[1][1])); dbg(DBG_USR1, "le
hopsize de L1=%f\n",hopsize[1]); p->hopsize= hopsize[1];
//p->hop=0;
p->id_ancre=1;
for(i=0;i<8;i++)
if (call envoiMsg.send(TOS_BCAST_ADDR, sizeof( DVhopMsg),
&msg)== SUCCESS)
call Leds.redOn();
}
}
break;
case 2 :
atomic{
if( (ancre_recu[2][0]==FALSE) && (poi->id_ancre==0)
){
ancre_recu[2][0]=TRUE;
hop[2][0]=poi->hop+1;
dbg(DBG_USR1, "le hop 20=%d recue a partir de%d idnode=%d\n",
hop[2][0],poi->id_ancre,poi->id_node);
}
else if( (ancre_recu[2][1]==FALSE)
&&(poi->id_ancre==1)){ ancre_recu[2][1]=TRUE;
hop[2][1]=poi->hop+1;
dbg(DBG_USR1, "le hop 21=%d recue a partir de %d idnode=%d\n",
hop[2][1],poi->id_ancre,poi->id_node); }
if( (ancre_recu[2][0]==TRUE)
&&(ancre_recu[2][1]==TRUE)&& (vvv==TRUE)){
vvv=FALSE;
hopsize[2]=((L0L2+L1L2)/(hop[2][0]+hop[2][1])); dbg(DBG_USR1, "le
hopsize de L2=%f\n",hopsize[2]); p->hopsize= hopsize[2];
// p->hop=0;
p->id_ancre=2;
for(i=0;i<12;i++)
if (call envoiMsg.send(TOS_BCAST_ADDR, sizeof( DVhopMsg),
&msg)== SUCCESS)
call Leds.redOn(); }
}
break;
default :
atomic{
if( poi->hopsize!=0 ){// si le hopsize est calculer
if((r==FALSE) && (poi->id_ancre<3) ){
r=TRUE;
premier_hop_arriver=poi->hopsize;
dbg(DBG_USR1, "le premier hopsize reçu = %f a partir de
noeud %d elle a id_ancre= %d\n",premier_hop_arriver,poi-
>id_node,poi->id_ancre);
}
if( (neud_recu_avant[0]==TRUE) && (poi->id_ancre==0)
){// si le message reçue a id_ancre=0 neud_recu_avant[0]=FALSE;
hop_noeud[0]=poi->hop+1;
//dbg(DBG_USR1, "le hopsize reçu=%f a partir de %d et
idnode=%d\n",poi->hopsize,poi->id_ancre,poi->id_node);
dbg(DBG_USR1, "le hop 30=%d recue a partir de %d et
idnode=%d\n",
hop_noeud[0],poi->id_ancre,poi->id_node);
hopsize[0]=poi->hopsize;
p->hopsize= poi->hopsize;
p->id_ancre=0;
p->id_node=TOS_LOCAL_ADDRESS;
p->hop=poi->hop+1;
for(i=0;i<8;i++)
if (call envoiMsg.send(TOS_BCAST_ADDR, sizeof( DVhopMsg),
&msg)== SUCCESS)
call Leds.redOn();
}
else if( (neud_recu_avant[1]==TRUE)
&&(poi->id_ancre==1)){ neud_recu_avant[1]=FALSE;
hop_noeud[1]=poi->hop+1;
dbg(DBG_USR1, "le hop 31=%d reçue a partir de %d et
idnode=%d\n", hop_noeud[1],poi->id_ancre,poi->id_node);
p->hopsize= poi->hopsize;
hopsize[1]=poi->hopsize;
p->id_ancre=1;
p->id_node=TOS_LOCAL_ADDRESS;
p->hop=hop_noeud[1];
for(i=0;i<12;i++)
if (call envoiMsg.send(TOS_BCAST_ADDR, sizeof( DVhopMsg),
&msg)== SUCCESS)
call Leds.redOn();
}
else if( (neud_recu_avant[2]==TRUE)
&&(poi->id_ancre==2)){
neud_recu_avant[2]=FALSE;
hop_noeud[2]=poi->hop+1;
//dbg(DBG_USR1, "le hopsize reçu=%f a partir de %d et
idnode=%d\n",poi->hopsize,poi->id_ancre,poi->id_node);
dbg(DBG_USR1, "le hop 32=%d recue a partir de %d et
idnode=%d\n", hop_noeud[2],poi->id_ancre,poi->id_node);
hopsize[2]=poi->hopsize; p->hopsize= poi->hopsize;
p->id_ancre=2; p->hop=hop_noeud[2]; p->id_node=TOS_LOCAL_ADDRESS;
for(i=0;i<12;i++)
if (call envoiMsg.send(TOS_BCAST_ADDR, sizeof( DVhopMsg),
&msg)== SUCCESS)
call Leds.redOn();
}
if(affiche1==TRUE && neud_recu_avant[0]==FALSE &&
neud_recu_avant[1]==FALSE && neud_recu_avant[2]==FALSE ){//si on a
reçoit les hop de tous les ancres
affiche1=FALSE;//variable pour afficher le min une seule fois
dbg(DBG_USR1, "la distance entre %d et ancre 0
=%f\n",TOS_LOCAL_ADDRESS,premier_hop_arriver*hop_noeud[0]); dbg(DBG_USR1, "la
distance entre %d et ancre 1
=%f\n",TOS_LOCAL_ADDRESS,premier_hop_arriver*hop_noeud[1]); dbg(DBG_USR1, "la
distance entre %d et ancre 2
=%f\n",TOS_LOCAL_ADDRESS,premier_hop_arriver*hop_noeud[2]); }
}
else if (poi->hopsize==0) {//le hopesize n'est pas encore
calculer
if(poi->id_ancre<3) {
if((poi->id_ancre==0)&&(neud_recu_apres[0]==FALSE)){
neud_recu_apres[0]=TRUE;
p->hopsize=0;
p->id_ancre=poi->id_ancre;
p->hop=poi->hop+1;
p->id_node=TOS_LOCAL_ADDRESS;
for(i=0;i<12;i++)
call envoiMsg.send(TOS_BCAST_ADDR, sizeof( DVhopMsg),
&msg);
}
else
if((poi>id_ancre==1)&&(neud_recu_apres[1]==FALSE)){
neud_recu_apres[1]=TRUE;
p->id_ancre=poi->id_ancre;
p->hopsize=0;
p->id_node=TOS_LOCAL_ADDRESS;
p->hop=poi->hop+1;
for(i=0;i<8;i++)
call envoiMsg.send(TOS_BCAST_ADDR, sizeof( DVhopMsg), &msg);
}
else
if((poi>id_ancre==2)&&(neud_recu_apres[2]==FALSE)){
neud_recu_apres[2]=TRUE;
p->id_ancre=poi->id_ancre;
p->hopsize=0;
p->id_node=TOS_LOCAL_ADDRESS;
p->hop=poi->hop+1;
for(i=0;i<12;i++)
call envoiMsg.send(TOS_BCAST_ADDR, sizeof( DVhopMsg),
&msg);
}
}
}
}
break;
}
}
return m;
}
}
Annexe 2
Procédure d'installation sous Windows XP et
exemple d'execution
Ce guide propose l'installation du principal outil
nécessaire au bon fonctionnement du système, notamment Cygwin
(couche d'émulation de l'API Linux) qui permet d'avoir une interface
Unix sous Windows. Cygwin est un environnement d'émulation Linux qui
permet d'avoir un shell et de compiler et exécuter les programmes Linux
(On dispose ainsi de gcc, apache, bash, etc.).
1- Télécharger le fichier
tinyos-1.1.0-1is.exe de la source
http://www.tinyos.net/dist-1.1.0/tinyos/windows/
.
2- Exécuter ce fichier pour installer la version 1.1.0
sous windows XP. L'installation se fait automatiquement. Un raccourci de Cygwin
est sauvegardé sur le bureau.
3- Accéder à
C:\tinyos\cygwin\opt\tinyos-1.x\doc\tutorial\verifyhw.html
et suivre les étapes que contient cette page afin de
vérifier si l'installation est bien réussie.
4- Accéder à: cd
/opt/tinyos-1.x/tools/java ET taper : make
5- Installer les mises à jour de NesC1.1.1 and
TinyOS1.1.15.
Pour se faire, rechercher sur le net
http://www.tinyos.net/dist-1.1.0/tinyos/windows/
ces
mises à jour en téléchargeant le
rpm et le mettant dans
C:\tinyos\cygwin\home\Nom
de votre répertoire
Et taper dans le shell:
rpm -ivh --ignoreos
nesc-1.1.2b-1.cygwin.i386.rpm
rpm -ivh --ignoreos --force
tinyos-1.1.15Dec2005cvs-1.cygwin.noarch.rpm
6- Aller à
opt/tinyos-1.x/tools/java/net/tinyos/sim et verifier si ces
fichiers sont presents:
SimObjectGenerator.java et
MoteSimObjectGenerator.java
S'ils existent, alors les supprimer de ce répertoire.
7- Editer le makefile qui est dans
C:\tinyos\cygwin\opt\tinyos-1.x\tools\java\net\tinyos\sim
et écrire cette instruction si elle n'existe pas :
net/tinyos/message/avrmote/*.class
Le makefile
.....
.....
net/tinyos/sim/plugins/plugins.list \ net/tinyos/sf/*.class \
net/tinyos/util/*.class \ net/tinyos/packet/*.class \
net/tinyos/message/*.class \
net/tinyos/message/avrmote/*.class \
org/apache/oro/text/regex/*.class \ org/python/compiler/*.class \
org/python/core/*.class \ org/python/modules/*.class \
org/python/parser/*.class \ org/python/parser/ast/*.class \
org/python/rmi/*.class \
.....
.....
8- Aller à shell et taper:
cd /opt/tinyos-1.x/tools/java/net/tinyos/sim make
clean
make
10- Accéder à l'application qui va être
simulée. On prend par exemple, l'application Blink.
Accéder au shell et faire:
cd /opt/tinyos-1.x/apps/blink
make pc
puis
export
PATH="$TOSROOT/tools/java/net/tinyos/sim:$PATH"
puis
TinyViz -run build/pc/main.exe 20
///Insérer le nombre de noeuds. Par exemple 20
Liste de Figures
Liste des Tableaux
Tableau II. 1: Comparaison entre algorithmes
centralisés et distribués. .. Erreur ! Signet non
défini.
References :
[1] Ian F. Akyildiz, Weilian Su, Yogesh Sankarasubramaniam, and
Erdal Cayirci A Survey on Sensor Networks.Georgia Institute of Technology.
Pages 102-114,IEEE Communications Magazine. August 2002
[2] Benahmed Khelifa. La sécurité dans les
réseaux de capteurs sans fil. Centre universitaire de Béchar,
Institut des sciences exactes BP: 417-08000 Béchar 2005.
Chapitre 4 Implémentation et Evaluation de
DV-Hop
[3] Mokhtar Aboelaze, Fadi Aloul. Current and Future Trends
in Sensor Networks:A Survey. IEEE 2005
[4] Mounir Achir. Technologies basse consommation pour
les réseaux Ad Hoc.
Thèse pour obtenir le grade de Docteur de
l'INPG.
Institut National Polytechnique de Grenoble. juillet 2005.
[5] memoire de sahraoui
[6] Wassim ZNAIDI , « Modélisation
formelle de réseaux de capteurs à partir de
TinyOS »,projet fin d'etude, école polytechnique de
tunisie,2006.
[7] Mr. fares Abdelfatah, « Développement d'une
bibliothèque de capteur sans fil »,
diplôme de master en informatique, université
Montpellier 2, avril 2008
[8]: KAREL Heurtefeux, FABRICE Valois. Localisation
collaborative pour reseaux capteurs. Lyon (France).
[9]: ARONDEL Olivier, PONPARDIN Thomas. Systeme de
positionnement Galileo/Glonass. Ecole superieur d'ingenieurs 01/09.
[10]: ROCH Jonas. Le Global Positioning System(GSM)
:structure et fonctionnement. Travail de maturité 2009.
[11]: MAKHOUL Abdallah. Reseaux de capteurs: localization
couverture et fusion de données. These Doctorat. Université de
Franche-comté :14-11-2008.
[12]: SAAD Clement. Quelques contributions dans les
réseaux de capteurs sans fil : Localisation et Routage . These Doctorat
École Doctorale 166 « I2S Mathématiques et Informatique
» Laboratoire d'Informatique (EA 4128). présentée à
l'Université d'Avignon et des Pays de Vaucluse. 10-07-2008.
[13] Haiyang Zhang.A S elective Anchor Node
Localization Algorithm for
Wireless Sensor Networks
[14] An Iterative Boundary Node Localization Algorithm based on
DV-hop Scheme in WSN
Nan Jiang, Xiao Xiang, Chen Huan
Journal of Convergence Information Technology, Volume6, Number
7, July 2011
[15] H. Alatrista, J. Mathieu, K. Gouaïch S. Aliaga,
« Implémentation de protocoles sur une plateforme de
réseaux de capteurs sans fil », TER master 1 informatique,
Université de Montpellier II, 29 Avril 2008.
[16] Borrong Chen, Geoff Werner Allen, Mark Hempstead, Matt
Welsh, Victor Shnayder,
Chapitre 4 Implémentation et Evaluation de
DV-Hop
« Simulating the Power Consumption of LargeScale
Sensor Network
Applications», Proceedings of the 2nd
international conference on Embedded
networked sensor systems, Pages: 188 - 200, Harvard University,
2004.
| 

