|
Promotion : 2012/2013
Ministère de l'Enseignement Supérieur et de la
Recherche Scientifique

Oued-Smar Alger, Algérie
Ecole doctorale STIC
Sciences et Technologies de l'Information et de la
Communication
Option : Informatique Répartie et Mobile (IRM)
Mini projet
Thème :
Surveillance de tout point d'une zone
d'intérêt à l'aide d'un
réseau de
capteurs multimédia sans fil
Réalisé par : Mohamed
BENAZZOUZ Proposé par : Dr. Mohamed AISSANI
Résumé :
L'optimisation pour la conservation d'énergie est l'un
des principaux axes de recherche dans les réseaux de capteurs sans fil
(RCSF). Dans l'une des applications des RCSF qui est la surveillance, un grand
nombre de noeuds capteurs est déployé, aléatoirement en
général, pour assurer la couverture d'une zone
d'intérêt, ou on peut intégrer des noeuds caméras
pour former ce qu'on appelle un réseau de capteurs multimédia
sans fil. Puisque l'énergie des batteries des capteurs est
limitée dans les RCSF et étant très difficile de changer
les batteries, on peut profiter de la redondance de couverture des noeuds
déployés en ordonnançant leurs mise en veille et mise
réveil alternée pour utiliser un nombre minimum possible de
noeuds à chaque instant donné afin de couvrir la zone
d'intérêt dans le but de prolonger la durée de vie de
réseau. Dans ce mini-projet, nous allons brasser les domaines
nécessaires pour la problématique citée. Pour cela, nous
présentons les réseaux de capteurs sans fil, un état de
l'art sur les systèmes de surveillance existants, ensuite nous
décrivons quelques algorithmes d'ordonnancement d'activité dans
les RCSF et enfin nous analysons les techniques de détection de la
redondance pour arriver à la fin vers une approche de solution au
problème.
Mots-clés :
Réseaux de capteurs sans fil, Systèmes de
surveillance, Algorithmes d'ordonnancement d'activités, Caméras
sans fil, Réseaux de capteurs multimédia, Redondance, Couverture
de zone.
Table des matières
|
Introduction générale
|
1
|
|
Chapitre 1 : Généralités sur les
réseaux de capteurs sans fil (RCSF)
|
.3
|
|
1.1 Introduction
|
3
|
|
1.2 Présentation des réseaux de capteurs sans fil
|
4
|
|
1.2.1 Définition d'un capteur sans fil
|
.4
|
|
1.2.2 Définition d'un réseau RCSF
|
6
|
|
1.2.3 Historique d'évolution des réseaux de
capteurs sans fil
|
6
|
|
1.2.4 Les réseaux de capteurs multimédia
|
..7
|
|
1.2.5 Domaines d'applications des réseaux de capteurs sans
fil
|
7
|
|
1.2.6 Architecture de communication
|
9
|
|
1.2.7 Systèmes d'exploitation et technologies
utilisées dans les RCSF
|
9
|
|
1.2.8 Aspect sécurité et tolérance aux
pannes dans les RCSF
|
10
|
|
1.3 Caractéristiques et contraintes d'un RCSF
|
...11
|
|
1.4 La redondance dans les réseaux de capteurs
|
11
|
|
1.4.1 Types de la redondance
|
12
|
|
1.4.2 Contribution de la redondance dans les RCSF
|
13
|
|
1.5 Axes et tendances de recherche dans les RCSF
|
13
|
|
1.6 Conclusion
|
14
|
|
Chapitre 2 : Etat de l'art sur les
systèmes de surveillance
|
|
|
2.1 Introduction
|
15
|
|
2.2 Définition d'un système de surveillance
|
15
|
|
2.3 Type de systèmes de surveillance selon le type de
noeuds
|
16
|
|
2.3.1 Systèmes de surveillance à base de capteurs
scalaires
|
16
|
|
2.3.2 Systèmes de surveillance à base de capteurs
multimédia
|
16
|
|
2.3.2.1 Définition d'un capteur multimédia
|
.17
|
|
2.3.2.2 Evolution des systèmes de vidéosurveillance
|
17
|
|
2.3.3Systèmes de surveillance à base de capteurs
hybrides
|
.17
|
|
2.3.3.1 Technique de communications dans les systèmes
hybrides
|
19
|
|
2.4 Caractéristiques des réseaux de capteurs
multimédia
|
19
|
|
2.5 L'effet des systèmes de surveillance
|
.20
|
|
2.6 Conclusion
|
21
|
|
Chapitre 3 : Ordonnancement d'activité de
mise en veille dans les RCSF
|
|
|
3.1 Introduction
|
22
|
|
3.2 Définition d'ordonnancement d'activité de mise
en veille dans les RCSF
|
22
|
|
3.3 Notion de couverture dans l'ordonnancement d'activité
dans les RCSF
|
23
|
|
3.4 Approches de gestion de l'ordonnancement
|
. 23
|
|
3.4.1 Approche centralisée
|
..23
|
|
3.4.2 Approche hiérarchique
|
24
|
|
3.4.3 Approche localisée
|
.24
|
|
3.5 Algorithmes d'ordonnancement d'activité dans les RCSF
|
25
|
3.6 Conclusion .26
Chapitre 4 : Techniques de détection de la
redondance dans les RCSF
4.1 Introduction 28
4.2 Modélisation d'un réseau de capteurs 28
4.3 Notion de couverture de zone dans les RCSF 29
4.4 Définition de la redondance dans les RCSF .30
4.5 Classification des méthodes de détection de la
redondance dans les RCSF 30
4.5.1 L'approche géométrique 30
4.5.2 L'approche analytique 35
4.6 Discussion .36
4.7 Conclusion 37
Conclusion générale .40
Références bibliographies
1
Introduction générale
Depuis quelques décennies, le besoin de surveiller et
de contrôler les phénomènes physiques tels que la
température, la pression barométrique, la luminosité, le
son ou d'autres grandeurs est devenu primordial pour de nombreuses applications
industrielles et scientifiques. Grâce à la miniaturisation
croissante de l'électronique et les progrès des technologies des
télécommunications, qui n'ont cessé depuis
l'émergence de l'informatique, et l'invention de nouveaux
réseaux, appelés Réseaux de Capteurs Sans Fil (RCSF),
permettent aujourd'hui de produire à faible coût des capteurs
communicants peu consommateurs d'énergie pour répondre à
cette demande croissante qui viennent au secours de l'environnement et de
l'industrie, ils sont basés sur la collaboration d'un grand nombre de
noeuds communiquant entre eux via des transmissions à courte
portée.
L'utilisation des capteurs dans notre vie n'est pas une
nouveauté, ce qui est nouveau c'est leur miniaturisation grandissante et
l'abandon d'un jour à l'autre du câblage au profit des
communications radio, ces micro-capteurs sont de véritables
systèmes embarqués, et le déploiement de plusieurs d'entre
eux forme un réseau de capteurs sans fil à grande autonomie et
à infrastructure non prédéfinie. Ces réseaux ont
envahi plusieurs domaines d'application tels que le domaine militaire,
médical, agriculture, environnemental, de précision et bien
d'autres.
Toutefois, les RCSF soulèvent de nombreuses
problématiques de recherche par les applications potentielles qu'ils
couvrent. Ces contraintes concernent la limitation des capacités de
traitement, de stockage et surtout d'énergie parce qu'ils sont
généralement alimentés par des batteries à
capacités limitées. En effet, il est difficilement envisageable
de recharger ces batteries, en raison du déploiement des capteurs dans
des zones hostiles ou difficilement accessibles. Par conséquent, la
limitation énergétique des capteurs joue un rôle important
dans la durée de vie du réseau.
Les RCSF sont considérés comme un type
spécial de réseaux ad hoc et apportent une perspective
intéressante, celle de réseaux capables de s'auto-configurer et
de s'autogérer sans qu'il y ait besoin d'interventions humaines et ou
les données récoltées sont acheminées grâce
à des communications sans fil en multi-saut à une station de base
(ou puits) dont le rôle est entre autre de manipuler les données
récoltées. Les noeuds sont généralement
déployés de manière aléatoire à travers une
zone géographique, appelée zone d'intérêt. Il est
devenu possible de déployer un réseau constitué d'un grand
nombre de capteurs collaboratifs afin de surveiller une zone
d'intérêt comme le cas des systèmes de détection de
feux dans les forêts denses et difficilement accessibles, ou dans le cas
de la surveillance des frontières terrestres comme le projet
européen TALOS.
Les systèmes de surveillance et l'une des applications
les plus importantes des RCSF et peuvent être mis en place dans de
nombreuses domaines, aussi bien sur un site frontalier ou bien dans un site
industriel ou un chantier. On connaît des systèmes de surveillance
qui comportent des tours de surveillance, au sommet desquelles une
caméra balaye de façon large la zone à surveiller, mais ce
type de système ne permet pas d'avoir une visibilité à
longue distance lorsque le relief alentour n'est pas plat, la présence
d'obstacles, comme peuvent l'être des montagnes ou des bâtiments
par exemple, à proximité des tours complique les
opérations de surveillance d'où la nécessité
d'introduire des capteurs de plusieurs types déployées sur toute
la zone d'intérêt qui peut être hostile et inaccessible pour
mettre des systèmes de surveillance standards.
2
Notre Travail intitulé « Surveillance de tout
point d'une zone d'intérêt à l'aide d'un réseau de
capteurs multimédia sans fil » rentre dans le cadre d'un
projet à l'école militaire polytechnique qui consiste à
réaliser un système de surveillance de zone pour détecter
un intrus (similaire à celui des USA ou de UE), éventuellement
assurer sa poursuite, et remonter des alarmes vers l'utilisateur final pour une
prise de décision. Les systèmes de surveillance à base de
RCSF fait partie de la problématique de la couverture d'une zone qui
consiste à profiter de la redondance, issue du déploiement
aléatoire des noeuds sur la zone surveillée, pour procéder
à leur mise en veille alternée. En d'autres termes, il s'agit
d'ordonnancer les noeuds dans des ensembles d'activation disjoints, tout en
respectant les contraintes de couverture et de connectivité pour assurer
la surveillance voulue, donc la problématique consiste donc à
maximiser l'efficacité du réseau dans la détection des
intrus et la transmission des alertes ainsi générées vers
l'utilisateur final tout en minimisant la consommation de l'énergie par
l'application des mécanismes mise en veille dynamique des noeuds
capteurs redondants dans le réseau.
Sachant que l'objectif final de notre magistère est de
déployer une application prototype de surveillance de tout point d'une
zone en utilisant des noeuds capteurs Imote2 disponibles à
l'EMP (Ecole Militaire Polytechnique), dans ce mini projet nous donnons dans le
premier chapitre quelques généralités sur les RCSF, nous
donnons dans le deuxième chapitre un état de l'art sur les
systèmes existants pour la surveillance de tout point d'une zone, et
nous synthétisons dans le troisième chapitre les techniques de
détection de la redondance des noeuds capteurs, nous présentons
dans le quatrième chapitre les mécanismes efficaces de la mise en
veille dynamique et d'ordonnancement pour l'acheminement en temps réel
de l'information sur tout intrus détecté vers le collecteur du
réseau, tout en préservant la durée de vie du
réseau, et enfin nous terminons ce rapport par une analyse et des
discussions.
3
Chapitre 1 :
Généralités sur les
réseaux
de capteurs sans fil (RCSF)
1.1. Introduction
L'apparition des nouvelles technologies ainsi que les
progrès effectués dans le domaine des réseaux et du
traitement de l'information ont entraîné l'apparition de nouveaux
outils et objets tels que les réseaux de capteurs et leurs applications.
Depuis quelques années, les réseaux de capteurs sans fil (RCSF)
s'ouvrent à plusieurs domaines d'applications : militaire,
sécurité civile (surveillance des risques d'incendie, des
catastrophes naturelles, des centrales nucléaires, ...), transport
(automobile, ferroviaire, aéronautique, spatial), industriel
(contrôle de la qualité de production, surveillance des lieux,
...), environnement, etc. L'environnement intègre de plus en plus des
capteurs pour le contrôle, la commande ou la surveillance des lieux ou
des systèmes [2].
Les RCSF constituent une catégorie de réseau
sans fil comportant un très grand nombre de noeuds, ils sont
considérés comme un type spécial de réseaux ad hoc.
Les noeuds de ce type de réseaux consistent en un grand nombre de
micro-capteurs capables de récolter et de transmettre des données
environnementales d'une manière autonome, c'est pour cette raison qu'ils
sont caractérisés par un déploiement très dense et
souvent aléatoire qui engendre un certain degré de redondance.
La redondance induite par ce déploiement
aléatoire représente une caractéristique
intéressante pour ces réseaux, dans le sens où elle peut
être exploitée pour prolonger la durée de vie du
réseau, rétablir la couverture de surface ou encore assurer la
fiabilité de l'application. Cette redondance est une redondance
spatiale, nous verrons dans ce chapitre qu'il existe d'autres types de
redondance, à savoir la redondance temporelle et d'information.
L'objectif de ce chapitre est de donner d'abord une vue
générale sur les réseaux de capteurs, en présentant
leurs domaines d'application, leurs architecture, leurs caractéristiques
et contraintes, et les technologies utilisées. Nous abordons ensuite le
concept de la redondance et explicitons son apport dans certains aspects des
réseaux de capteurs et on parlera enfin sur les axes de recherche.
1.2. Présentation des réseaux de capteurs
sans fil
1.2.1. Définition d'un capteur sans fil :
Un capteur sans fil est un petit dispositif
électronique capable de mesurer une valeur physique environnementale
(température, lumière, pression, humidité, vibration,
etc.), et de la communiquer à un centre de contrôle via une
station de base [3]. Chaque capteur assure les trois principales
4
fonctions de base qui sont : l'acquisition de données,
les traitements sur ces données et leurs communications aux stations de
bases. La figure suivante montre quelques capteurs :
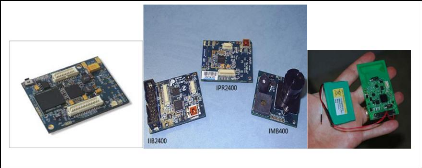
Imote2 (disponible à l'EMP) Capteur WSN430 (de
CTI)
Figure 1.1 Quelques capteurs sans fils
Un noeud capteur est composé de plusieurs
éléments ou modules correspondant chacun à une tâche
particulière d'acquisition, de traitement, ou de transmission de
données. Il comprend également une source d'énergie
[4].
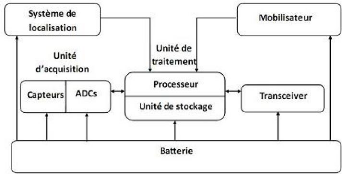
Figure.1.2 : Architecture des capteurs sans fils Un capteur est
composé de quatre unités de base (Fig. 1.2) :
- Unité d'acquisition : est généralement
composée de deux sous-unités (les capteurs et les convertisseurs
analogique-numérique (ADCs). Les capteurs obtiennent des mesures
numériques sur les paramètres environnementaux et les
transforment en signaux analogiques [3]. Les ADCs convertissent ces signaux
analogiques en signaux numériques.
- Unité de traitement : est composée de deux
interfaces, une interface avec l'unité d'acquisition et une autre avec
le module de transmission. Elle contrôle les procédures permettant
au noeud de collaborer avec les autres noeuds pour réaliser les
tâches d'acquisition, et stocke les données collectées.
- Unité de communication (Transceiver) : elle est
responsable de toutes les communications via un support de communication radio
qui relie le noeud au réseau.
5
- Batterie (source d'énergie) : alimente les
unités citées précédemment, et il existe des
capteurs qui sont dotés d'autres composants additionnels : les
systèmes de localisation
comme (Global Positioning System) et un mobilisateur lui
permettant le déplacement.
1.2.2. Définition d'un réseau RCSF :
Un RCSF est un type spécial de réseau ad-hoc
défini par un ensemble coopérant de capteurs
déployés dans une zone géographique appelée zone de
captage ou zone d'intérêt, afin de surveiller un
phénomène quelconque et de récolter des données
d'une manière autonome. Les capteurs utilisent une communication sans
fil (Zig Bee ou Wifi) pour acheminer les données captées avec un
routage multi-sauts vers un noeud considéré comme "point de
collecte", appelé station de base ou noeud puits. Cette dernière
peut être connectée à une machine puissante via internet,
réseaux GPRS ou par satellite (Figure 1.3). L'usager peut adresser ses
requêtes aux capteurs en précisant l'information
d'intérêt [05].
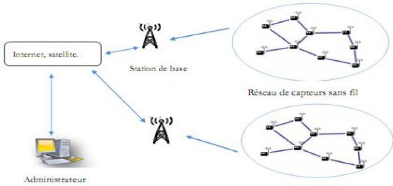
Figure 1.3 Architecture de réseaux de capteurs sans
fil
Le tableau suivant montre une comparaison entre les
réseaux de capteurs et les réseaux Ad-Hoc :
|
Réseaux de capteurs sans fil
|
Réseaux Ad-hoc
|
|
Objectif bien ciblé
|
Objectif général en communication
|
|
Noeuds en collaboration
|
Chaque noeud a son propre objectif
|
|
Flot de données « many to one »
|
Flot «any to any»
|
|
Très grand nombre de noeuds
|
Nombre limité de noeuds avec notion de ID
|
|
Energie comme facteur déterminant
|
Débit majeur
|
|
Communication broadcast
|
Communication point à point
|
Tableau 1.1 Comparaison entre capteurs et A-hoc [06]
1.2.3. Historique d'évolution des réseaux de
capteurs sans fil :
La technologie des réseaux de capteurs sans fil est
devenue l'une des merveilleuses technologies dans le 21ème siècle
; les réseaux de capteurs ont montré leur impact sur notre vie
quotidienne. CHONG, et al [07] ont parlé de trois
générations des noeuds de capteurs.
6
|
Génération
|
Période
|
Taille
|
poids
|
Batterie
|
|
1ère
|
1800 - 1900
|
Taille d'une grande boite de chaussure
|
Quelques Kg
|
Grosse
|
|
2ème
|
2000 - 2003
|
Taille d'une boite de cartes
|
Quelques grammes
|
AA
|
|
3ème
|
A partir de 2010
|
Taille de particule de poussière
|
Négligeable
|
Solaire
|
Tableau 1.2 Génération de noeuds de capteurs
Les capteurs traditionnels mesurant une grandeur physique,
sont présents depuis des décennies dans des domaines comme
l'industrie, l'aéronautique ou l'automobile. Ils sont en
général reliés à la base de traitement filaire mais
la nouveauté des nouveaux réseaux de capteurs est qu'ils ont la
possibilité de communiquer par ondes radio (Wifi ou Zig Bee) avec
d'autres capteurs proches.
La miniaturisation du matériel et la multiplication des
moyens de connexions associées à l'augmentation des
capacités de calcul et de mémoire en informatique ont permis aux
réseaux de capteurs d'exister, et cela à une échelle
très large au point d'accomplir les tâches les plus complexes pour
l'humain. Ainsi, on peut les retrouver désormais dans l'armement, le
nucléaire, le sauvetage, la sauvegarde de l'environnement, la
médecine, etc.
La recherche continue pour perfectionner le fonctionnement des
futurs réseaux de capteurs. De nombreux travaux sont effectués
pour résoudre les trois difficultés majeures auxquelles sont
confrontés les capteurs : l'énergie, la puissance
d'émission, la capacité de stockage et de calcul.
1.2.4. Les réseaux de capteurs multimédia
Les réseaux de capteurs multimédia sont des
réseaux de capteurs sans fil qui se compose de noeuds pouvant
gérer des données non scalaires dites multimédias comme le
cas l'image, la vidéo et le son, pour cela la manière de
détecter et d'acheminer les données vers les collecteurs et
l'utilisateur, diffère de celle des réseaux de capteurs sans fil
standards et cela est due aux espaces volumineux des données
traitées ce qui complique leurs traitement, stockage et transmission.
1.2.5. Domaines d'applications des réseaux de
capteurs sans fil :
La miniaturisation, l'adaptabilité, le faible
coût et la communication sans fil permettent aux réseaux de
capteurs d'envahir plusieurs domaines d'applications. Ils permettent aussi
d'étendre le domaine des applications existantes. Parmi ces domaines
où ces réseaux se révèlent très utiles et
peuvent offrir de meilleures contributions, on peut noter la surveillance, le
militaire, la santé, le scientifique, l'industriel, le médical,
le climatique, l'environnemental etc. Voici quelques exemples d'applications
potentielles dans ces différents domaines [05]:
- Applications militaires : Comme dans le cas
de la majorité des technologies, le domaine militaire a
été un moteur initial pour le développement des
réseaux de capteurs. Le déploiement rapide, le coût
réduit, l'auto-organisation et la tolérance aux pannes des
réseaux de capteurs sont des caractéristiques qui rendent ce type
de réseaux un outil adéquat dans un tel domaine. Comme exemple
d'application dans ce domaine, on peut penser à un réseau de
capteurs déployé sur un endroit stratégique ou difficile
d'accès, comme les zones infectées.
7
Des tests concluants ont déjà été
réalisés dans ce domaine par l'armée américaine
dans le désert de Californie [08], le projet DSN (Distributed Sensor
Network) au DARPA (Defense Advanced Research Projects Agency) était l'un
des premiers projets dans les années 80 ayant utilisés les
réseaux de capteurs pour rassembler des données
distribuées. Un réseau de capteurs peut être
déployé dans un endroit stratégique ou hostile, afin de
surveiller les mouvements des forces ennemies, ou analyser le terrain avant d'y
envoyer des troupes (détection d'intrusions, détection des armes
chimiques, biologiques ou radiations nucléaires).
- Application à la surveillance :
L'application des réseaux de capteurs dans le domaine de
sécurité peut diminuer considérablement les
dépenses financières consacrées à la
sécurisation des lieux et des êtres humains. Ainsi,
l'intégration des capteurs dans de grandes structures telles que les
ponts ou les bâtiments aidera à détecter les fissures et
les altérations dans la structure suite à un séisme ou au
vieillissement de la structure. Le déploiement d'un réseau de
capteurs de mouvement peut constituer un système d'alarme qui servira
à détecter les intrusions dans une zone de surveillance.
- Application environnementale : Les
réseaux de capteurs peuvent être utilisés pour surveiller
les changements environnementaux. Ils servent à déterminer les
valeurs de certains paramètres à un endroit donné, comme
par exemple : la température, la pression atmosphérique, etc. En
dispersant des noeuds capteurs dans la nature, on peut détecter des
événements tels que des feux de forêts, des tempêtes
ou des inondations. Ceci permet une intervention beaucoup plus rapide et
efficace des secours. Dans le domaine de l'agriculture, les capteurs peuvent
être utilisés pour réagir convenablement aux changements
climatiques, par exemple en déclenchant le processus d'arrosage lors de
la détection de zones sèches dans un champ agricole.
- Applications médicales : Dans le
domaine de la médecine, les réseaux de capteurs peuvent
être utilisés pour assurer une surveillance permanente des organes
vitaux de l'être humain grâce à des micro-capteurs qui
pourront être avalés ou implantés sous la peau
(surveillance de la glycémie, détection de cancers, etc.). Ils
peuvent aussi faciliter le diagnostic de quelques maladies en effectuant des
mesures physiologiques telles que : la tension artérielle, battements du
coeur, à l'aide des capteurs ayant chacun une tâche bien
particulière. Les données physiologiques collectées par
les capteurs peuvent être stockées pendant une longue durée
pour le suivi d'un patient pour une ultérieure décision
médicale.
- La domotique : Le déploiement des
capteurs de mouvement et de température dans les futures maisons dites
intelligentes permet d'automatiser plusieurs opérations domestiques
telles que : la lumière qui s'éteint et la musique qui se met en
état d'arrêt quand la chambre est vide, la climatisation et le
chauffage s'ajustent selon les points multiples de mesure, le
déclenchement d'une alarme par le capteur anti-intrusion quand un intrus
veut accéder à la maison.
- Applications commerciales : Il est possible
d'intégrer des noeuds capteurs au processus de stockage et de livraison.
Le réseau pourra être utilisé pour connaître la
position, l'état et la direction d'un paquet ou d'une cargaison. Il
devient alors possible pour un client qui attend la réception d'un
paquet, d'avoir un avis de livraison en temps réel et de connaître
la position actuelle du paquet. Pour les entreprises manufacturières,
les réseaux de capteurs
8
permettront de suivre le procédé de production
à partir des matières premières jusqu'au produit final
livré. Grâce aux réseaux de capteurs, les entreprises
pourraient offrir une meilleure qualité de service tout en
réduisant leurs coûts.
- Applications dans le domaine sportif :
L'évolution des réseaux de capteurs est utilisée
de plus en plus dans le domaine sportif, à savoir les systèmes de
surveillance, les systèmes de calcul de trajectoires (comme dans le
tennis), systèmes de détection d'erreurs d'arbitrage (comme dans
le football indiquent si le balle a franchi la ligne de but) et d'autres
applications des réseaux de capteurs sont illustrées dans la
figure 1.4 qui suit.
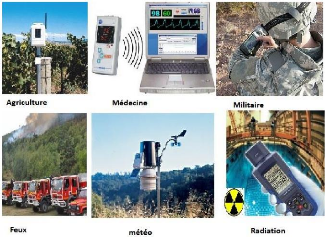
Figure 1.4 Exemples d'applications des RCSF
1.2.6. Architecture de communication
La pile protocolaire utilisée par la station de base
ainsi que tous les autres capteurs du réseau est illustrée par la
figure (1.5). Suivant la fonctionnalité des capteurs, différentes
applications peuvent être utilisées et fondées sur la
couche application. La couche transport aide à gérer le flux de
données si le réseau de capteurs l'exige. Elle permet de diviser
les données issues de la couche application en segments pour les
délivrer. La couche réseau prend soin de router les
données fournies par la couche transport. Le protocole MAC (Media Access
Control) de la couche liaison assure la gestion de l'accès au support
physique. La couche physique assure la transmission et la réception des
données au niveau bit [10].
1.2.7. Systèmes d'exploitation et technologies
utilisées dans les RCSF
Plusieurs systèmes d'exploitation ont été
développés pour répondre aux contraintes
particulières des réseaux de capteurs, le système plus
connu est TinyOS.
TinyOS est un système d'exploitation
open source conçu pour les capteurs sans fils et développé
par l'Université de Berkeley. Il est basé sur une architecture
à base de modules : pilotes pour les capteurs, les protocoles
réseau et les services distribués. Les composants sont
programmés en NesC, un langage de programmation
dérivé du C adapté aux faibles ressources physiques des
capteurs. Un certain nombre de plateformes sont directement programmables comme
par exemple
9
les tmote ou les MicaZ (ces deux modèles sont
compatibles avec ZigBee). TOSSIM est un simulateur de capteurs pour les
programmes TinyOS, tout programme en NesC peut être compilé de
manière à être exécuté dans TOSSIM, ce qui
permet de simuler le comportement d'un ou plusieurs capteurs ainsi de les
programmer.
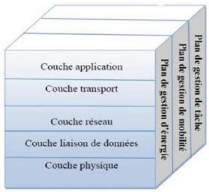
Figure 1.5 Pile protocolaire
Bluetooth / IEEE 802.15.4 Bluetooth
est une spécification de l'industrie des
télécommunications. Elle utilise une technique radio courte
distance destinée à simplifier les connexions entre les appareils
électroniques. Malheureusement, un grand défaut de cette
technologie est sa trop grande consommation d'énergie.
ZigBee Beaucoup moins connue que
Bluetooth, c'est une norme de transmission de données sans fil
permettant la communication de machine à machine. Sa très faible
consommation électrique et ses coûts de production très bas
en font une candidate idéale pour la domotique ou le matériel de
type capteur, télécommande ou équipement de contrôle
dans le secteur industriel. Les débits autorisés sont
relativement faibles, entre 20 et 250 Kbits/s, mais c'est véritablement
sa très faible consommation électrique qui en fait son atout
principal. ZigBee fonctionne sur la bande de fréquences des 2,4 GHz et
sur 16 canaux, sa portée était au début d'une dizaine de
mètres, elle est désormais de 100 mètres.
1.2.8. Aspect sécurité et tolérance
aux pannes dans les RCSF
Les réseaux de capteurs se développant et
faisant partie des infrastructures critiques surtout dans les domaines
sécuritaires et militaires, il est tout à fait naturel de penser
à la menace que posent les attaques, les virus et les vers sur ces
réseaux, pour cela la sécurisation des liens dans les
réseaux de capteurs et l'établissement des clés doivent se
faire une fois que les capteurs sont déployés.
A noter que les mémoires sont souvent physiquement
séparées dans les capteurs, il est alors pratiquement impossible
d'exécuter le code qui serait inséré dans la pile, comme
c'est souvent le cas dans les attaques qui exploitent un dépassement de
buffer pour écraser la pile. Le code application est souvent
protégé en écriture donc un attaquant ne peut pas modifier
les programmes présentés en mémoire.
10
La taille des paquets que peut recevoir un capteur est
très limitée (typiquement 28 octets), ce qui rend l'injection du
code difficile.
Les techniques qu'utilisent les vers pour compromettre une
machine sur internet, ne peuvent donc pas être utilisées
directement sur les capteurs. Cependant des travaux ont montré, en
concevant un des premiers virus/vers pour capteurs de type MicaZ/TinyOS, [10]
que la conception de virus, bien que difficile mais n'est pas impossible.
Toutes les applications des réseaux de capteurs ont des
contraintes de sécurité très différentes.
Cependant, dans la plupart d'entre elles, l'intégrité et
l'authenticité des données doivent être fournies pour
s'assurer que des noeuds non-autorisés ne puissent pas injecter des
données dans le réseau. Le chiffrement des données est
souvent requis pour des applications sensibles telles que les applications
militaires ou les applications médicales.
Une panne au niveau d'un capteur peut se produire à
cause d'une perte de connexions sans fil due à l'extinction du capteur
suite à l'épuisement de sa batterie, ou tout simplement à
une destruction physique accidentelle ou intentionnelle par un ennemi, des
techniques peuvent être conçues pour évaluer le niveau de
la tolérance aux fautes exigé par les réseaux de capteurs,
ce niveau est adapté en fonction de l'hostilité du milieu dans
lequel le réseau est déployé.
1.3. Caractéristiques et contraintes d'un
RCSF
La conception des réseaux de capteurs est
influencée par de nombreux facteurs et représentent la base de la
conception de protocoles ou d'algorithmes pour les réseaux de capteurs.
Il existe plusieurs caractéristiques dans les RCSF dont nous citons les
plus importantes [11] :
- Durée de vie du réseau :
C'est l'intervalle de temps qui sépare l'instant de déploiement
du réseau de l'instant où l'énergie du premier noeud
s'épuise. Selon l'application, la durée de vie exigée pour
un réseau peut varier entre quelques heures et plusieurs
années.
- Bande passante limitée : Afin de
minimiser l'énergie consommée lors de transfert de données
entre les noeuds, les capteurs opèrent à bas débit.
Typiquement, le débit utilisé est de quelques dizaines de Kb/s.
Un débit de transmission réduit n'est pas handicapant pour un
réseau de capteurs où les fréquences de transmission ne
sont pas importantes.
- Média du transport : Dans un
réseau de capteurs, la communication multi sauts entre les noeuds est
réalisée avec des liens sans fil à l'aide de media
optique, infrarouge ou radio. La plus part des réseaux de capteurs
utilisent des circuits de communication à radio fréquence
grâce à leur faible coût ainsi que leur facilité
d'installation [12].
- La topologie du réseau : Elle est en
constante évolution à cause du changement de l'état
d'activité des capteurs (actif, mise en veille et passif). Il faut que
les capteurs soient capables d'adapter leur fonctionnement afin de maintenir la
topologie souhaitée. On distingue généralement trois
phases dans la mise en place et l'évolution d'un réseau :
- Déploiement : Les capteurs sont soit
répartis de manière déterministe soit de manière
aléatoire lancés en masse depuis un avion, par exemple.
- Le passage à l'échelle : La
plupart des protocoles sont conçus pour des réseaux de capteurs
d'une grande taille. Cependant, ces protocoles sont dits efficaces si les
performances des
11
réseaux ne doivent pas chuter d'une manière
drastique quand le nombre de capteurs augmente dans le réseau.
- La consommation d'énergie :
L'économie d'énergie est une des problématiques majeures
dans les réseaux de capteurs. En effet, la recharge des sources
d'énergie est souvent trop coûteuse et parfois impossible. Il faut
donc que les capteurs économisent au maximum l'énergie afin de
pouvoir fonctionner.
- L'auto-configuration : Les réseaux
de capteurs sont généralement déployés
aléatoirement dans des zones d'intérêt hostiles. Par
conséquent, aucune intervention humaine ne peut être requise pour
assurer leur organisation. L'auto-configuration de ces réseaux
s'avère nécessaire pour leur bon fonctionnement.
- Topologie dynamique : Les capteurs peuvent
être attachés à des objets mobiles qui se déplacent
d'une façon libre et arbitraire et le changement d'état des
capteurs entre actif et veille rendant ainsi, la topologie du réseau
fréquemment changeante.
1.4. La redondance dans les réseaux de
capteurs
La redondance représente pour les réseaux de
capteurs une caractéristique qui est à la fois rentable et
pénalisante. Elle peut être utilisée pour améliorer
la fiabilité de la détection, l'exactitude des données
collectées ou encore augmenter la durée de vie du réseau.
Par contre, elle engendre un transfert de données plus important et
implique une charge de trafic supplémentaire. Ce constat motive les
chercheurs à renforcer ses aspects positifs.
Le concept de la redondance n'est pas formellement
défini sous tous ses aspects dans les réseaux de capteurs. De
plus, cette propriété peut être définie de
différentes façons, toutefois nous avons retenu la
définition suivante qui nous semble être la plus appropriée
pour le contexte des réseaux de capteurs : La redondance est l'ajout de
ressources supplémentaires qui peuvent produire des résultats
similaires [13].
1.4.1. Types de la redondance
La redondance peut avoir plusieurs formes suivantes : spatiale
(duplication de composant), temporelle (traitement multiple) et
informationnelle (code et signature).
- La redondance spatiale (physique) :
Signifie la possibilité d'obtenir l'information d'une position
spécifique à partir de différentes sources et elle se base
sur le positionnement géographique des noeuds capteurs dans la zone
d'intérêt et elle implique la réplication des ressources
dans la surface de couverture du réseau.
- La redondance temporelle : Elle est
utilisée pour augmenter la précision des données
collectées par le capteur et à masquer les erreurs dans la
détection ou la communication, en exécutant une action plus d'une
fois dans le temps [13].
- La redondance d'information : Elle
introduit une redondance dans la représentation de l'information, en
ajoutant des données redondantes, tel que les bits de parité qui
permettent de détecter les erreurs ou bien des extra bits qui permettent
de reconstruire l'information perdue.
12
Les réseaux de capteurs sont denses et redondants. En
effet, bien que les noeuds capteurs puissent être placés un
à un de manière déterministe par un humain ou par un
robot, le déploiement aléatoire est adopté dans la
majorité des scénarios pour des raisons pratiques telles que le
coût et le temps.
1.4.2. Contribution de la redondance dans les RCSF
La redondance induite par ce déploiement
aléatoire est mise à profit pour améliorer certains
aspects des réseaux de capteurs, telle que la consommation
d'énergie, la sécurité, la couverture de surface ou encore
la fiabilité de l'application.
- La fiabilité : pour obtenir des
résultats fiables essentiellement lorsque les noeuds sont
défectueux ou rencontrent un dysfonctionnement, ce qui permet la
tolérance aux pannes.
- La sécurité : Pour y
remédier aux attaques, la redondance spatiale peut être
utilisée pour comparer les lectures locales avec celles obtenues des
capteurs redondants, puis un système de décision basé
connaissances est construit pour exclure les noeuds malicieux du
réseau.
- L'économie d'énergie : Comme
les capteurs disposent de ressources énergétiques
limitées, et que de plus cette source d'énergie se tarit et
conditionne donc la durée de vie du réseau, l'optimisation
énergétique doit être prise en considération quel
que soit le problème traité, La majorité des solutions
proposées pour optimiser la consommation d'énergie exploite la
redondance spatiale entrainée par le déploiement
aléatoire, et ce en ordonnançant l'activité des capteurs
redondants. Cet ordonnancement consiste à alterner les charges de
façon à épuiser les noeuds équitablement : pendant
qu'une partie participe à l'application, les capteurs redondants sont
dans un mode passif, économisant ainsi leur énergie.
- Le recouvrement de la couverture de surface
: L'utilisation des capteurs dans des zones sensibles rend impossible
un déploiement déterministe. Une façon de rétablir
la couverture de surface est de déplacer les capteurs redondants les
plus proches de la région non couverte. Cette solution s'applique aux
réseaux de capteurs mobiles. Elle contribue également à
renforcer la tolérance aux défaillances des réseaux de
capteurs [13].
1.5. Axes et tendances de recherche dans les RCSF
L'évolution du nombre d'applications et des travaux sur
les RCSF laisse dire que ce domaine de recherche est résolu d'avance, en
réalité, les problèmes et les contraintes liés
à ce domaine sont loin d'être résolus. Il n'y a aucun
standard spécifique aux RCSF, les problèmes de communications, de
traitement des données et de la gestion du capteur lui-même, sont
partiellement identifiés est les solutions apportées sont souvent
spécifiques à un cas précis. L'essentiel des challenges
techniques lancés par la communauté des chercheurs se
résume aux problèmes de: la découverte du réseau,
le routage, la couverture, la durée de vie, le contrôle du
réseau, le traitement collaboratif des données.
Les caractéristiques intrinsèques des RCSF,
telles que la capacité limitée des batteries, les moyens
limités de calcul et de traitement collaboratif de l'information,
diffèrent de celles d'un réseau TCP/IP traditionnel et des
réseaux ad-hoc en général [14].
Les axes de recherches sont passés ces dernières
années des problèmes généraux liés au
routage des données, au déploiement des capteurs, à la
sécurité et de couverture aux problèmes beaucoup plus
13
spécialisés concernant la
longévité des RCSF, améliorer leurs qualité de
services, augmenter leurs tolérances au pannes et garantie surtout pour
les applications à caractère sensible, d'où l'apparition
des travaux sur les réseaux de capteurs dans des domaines très
spécialisés et qui traitent des problématiques qui n'ont
pas été abordé auparavant comme l'utilisation de la
redondance pour augmenter la durée de vie de ces réseaux en
mettant en veille les capteurs à tour de rôle suivant des
politiques et des algorithmes d'ordonnancement d'activités. On peut
classifier les travaux de recherche dans le domaine des réseaux de
capteurs comme suit :
- Conception des capteurs : Trouver de
nouvelles conceptions adéquates et spécifiques pour des
environnements donnés (Détecteur de chute, vêtement
intelligents, Capteurs multimédia...).
- Protocoles de communication : Trouver de
nouvelles techniques et nouveaux protocoles de communication qui prennent en
compte l'évitement de collisions, les vides, les flux
multimédias...
- Reconnaissance des activités de personne
: Comme application de surveillance, et réseaux satellite pour
les applications de télémédecine...
- Récupération d'énergie et
optimisation : Trouver de nouvelles visions d'optimisations.
- Aspect sécurité : Comme
l'authentification d'information et les algorithmes de chiffrements
optimisés et adaptés pour les RCSF.
- Conception de middleware : Nouvelles
plateforme dédiées au RCSF.
Selon les couches, les défis actuels dans les
réseaux de capteurs se résument dans le niveau matériel
à la miniaturisation (nano-capteur), dans la couche physique à
l'amélioration de la fiabilité d'acquisition, dans la couche MAC
au développement des nouveaux protocoles qui augmente la QoS, au niveau
routage au développement de nouveaux aspects de routage avec
équilibrage de charge pour augmenter la durée de vie, au niveau
transport de trouver de nouveau mécanisme de control de flux plus
efficaces quant au niveau application c'est principalement liés au
développement de logiciels et applications de traitement de
l'information qui garantissent l'organisation et la pertinence de l'information
extraite des données fusionnées[15].
1.6. Conclusion
Dans ce chapitre nous avons parcouru les réseaux de
capteurs sans fil nous avons donné une vue générale en
décrivant leurs architecture, leurs applications, leur évolution
et les technologies de ce domaine, puis nous avons décrit les
caractéristiques de ces réseaux ou on a parlé sur les
réseaux de capteurs multimédias, ensuite nous avons abordé
l'aspect de la redondance et sa contribution dans ce type de réseaux et
enfin nous avons résumé une classification des axes et tendances
de recherches actuelles sur ce domaine. Les RCSF est un domaine de recherche
très répondu, et devient de plus en plus vaste et de nouvelles
tendances de recherches sont apparues surtout de ce qui concerne l'optimisation
d'énergie et l'application de ces réseaux dans domaines
spécialisés.
14
Chapitre 2 :
Etat de l'art sur les
systèmes de surveillance
2.1. Introduction
Le nombre croissant de menaces et d'incidents majeurs
liés à des attaques terroristes ou accidentels ou même
environnemental a fait prendre conscience de ce problème majeur et
d'investir du temps et des ressources dans la lutte contre cette
épreuve. Toutefois, la menace la plus sérieuse qui pèse
sur l'infrastructure d'une entreprise ou établissement
sécuritaire ou d'habitation peut ne pas se présenter sous la
forme d'une attaque extérieure mais même résider au sein
même de l'établissement d'où l'apparition des
systèmes de surveillance au fil des années et son
évolution qui suit l'évolution dans le domaine informatique et
technologique en général.
Des systèmes de surveillance peuvent être mis en
place dans de nombreuses applications, par exemple sur un site frontalier ou
dans un site industriel ou un chantier ou même dans une maison ou banque,
qui peuvent contenir des capteurs multimédia et mobiles pour conduire
à une surveillance furtive, restant efficace à signaler la
présence d'intrus, en général un système de
surveillance ça sous-entend la vidéosurveillance mais en
réalité ce n'est qu'un type des systèmes de surveillance
actuels.
L'objectif principal de cette solution de systèmes de
surveillance est de faciliter l'identification des événements
suspects se produisant sur une zone d'intérêt, qui peuvent
être le signe d'activités malveillantes ou d'erreurs de
procédure ou simplement pour prise de décision.
2.2. Définition d'un système de
surveillance
La surveillance est la fonction d'observer toutes
activités humaines, animales, artificielles ou environnementales dans le
but de superviser, contrôler ou même réagir sur un cas
particulier, on parle dans le domaine technique de supervision ou monitoring.
La surveillance a été toujours présente dans l'histoire
mais de manière différente à celle de nos jours, un livre
de Sun Tzu, écrit il y a 2 500 ans, décrit comment les
espions doivent être utilisés contre les ennemis, mais avec les
avancées technologiques et surtout dans le domaine informatique et
électronique ont apporté des nouveaux champs d'application
à la surveillance et surtout une nouvelle vision d'y procéder.
Ces types de systèmes sont des mécanismes et
procédures de surveillance adaptées à détecter la
présence d'intrus dans une zone déterminée. Contrairement
au radar qui ne fait que générer une simple alerte, l'optronique
permet à l'utilisateur de lever immédiatement le doute sur la
dangerosité de l'intrusion en associant généralement les
informations en provenance d'un capteur optique à un
15
système de traitement d'images et à un
système d'affichage ou de mémorisation des informations
résultant du traitement d'images effectué.
Le système de surveillance comporte un réseau de
postes de surveillance équipés chacun de moyens de
détection de type scalaire ou multimédia, dans lequel ces postes
de surveillance sont disposés selon une configuration du réseau
filaire ou sans fil qui est calculée automatiquement par des moyens
logiciels équipant un centre de gestion qui fait partie du réseau
et qui se trouve en liaison radio permanente avec les postes de
surveillance.
La position initiale de chaque poste de surveillance est
déterminée automatiquement par un calcul prenant en compte des
caractéristiques préenregistrées dans le centre de
gestion. Cette position peut être mise à jour automatiquement par
le centre de gestion sur la base des informations relatives au positionnement
effectif et au fonctionnement des postes de surveillance que le centre de
gestion reçoit en temps réel.
2.3. Type de systèmes de surveillance selon le
type de noeuds
Selon le type des noeuds constituants le réseau du
système de surveillance, on peut classifier les types en trois classes
à savoir les systèmes de surveillance à base de capteurs
scalaires, à base de capteurs multimédia ou une hybridation des
deux types.
2.3.1. Systèmes de surveillance à base de
capteurs scalaires
Les systèmes de surveillance à base de capteurs
scalaires sont des systèmes qui prennent comme moyen de détection
des capteurs de mouvements, de température, de pression
barométrique ou d'autres grandeurs physiques, Un nombre qui mesure une
température, une masse, ou une hauteur est un scalaire, une grandeur
scalaire (température, masse, ou hauteur) est un scalaire muni d'une
unité.
On trouve ce type de systèmes de surveillance dans
plusieurs domaines comme par exemple dans le détection de l'influence de
l'activité sismique sur un pont ou on place généralement
des capteurs de distance pour mesurer les fissures et donc alerter en cas de
risques majeurs, voilà dans la figure qui suit un exemple de
système de surveillance de pont.

Figure 2.1 Système de prévention de catastrophes
dans les ponts
16
2.3.2. Systèmes de surveillance à base de
capteurs multimédia
2.3.2.1. Définition d'un capteur
multimédia
Un capteur sans fil multimédia est celui qui
détecte et véhicule des données multimédia telles
que la vidéo, l'image et le son et donc des capteurs
spécialisés en multimédia comme les caméras Wifi,
les capteurs ultrason et d'imagerie infrarouge forment des réseaux de
capteurs multimédia et sont surtout utilisés dans le domaine de
la surveillance environnementale, sécuritaire et médicale.
Donc un réseau de capteurs multimédia se compose
de noeuds caméra (type de noeud multimédia) comme
présenté dans la figure 2.2. L'un des systèmes de
surveillance multimédia le plus connu est la vidéosurveillance,
et pour cela nous allons décrire dans la section qui suit
l'évolution de ces systèmes.
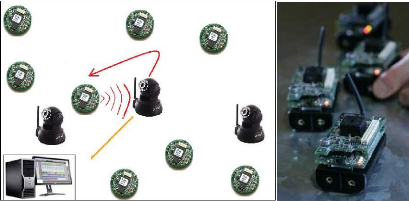
Figure 2.2. Exemple d'un réseau de capteurs
multimédia. 2.3.2.2. Evolution des systèmes de
vidéosurveillance
Les systèmes de vidéosurveillance existent
depuis quelques décennies, ils ont évolué progressivement
vers la technologie numérique alors qu'ils étaient
intégralement analogiques. Les systèmes actuels ne ressemblent
plus aux anciennes caméras analogiques branchées sur des
magnétoscopes traditionnels. Aujourd'hui, ils utilisent les
caméras réseau et les serveurs informatiques pour
l'enregistrement vidéo dans un système entièrement
numérique peuvent être guidés à distance [44].
- Systèmes de vidéosurveillance
classique CCTV utilisant des caméras analogiques avec sorties
coaxiales sont reliées au moniteur. Un opérateur doit être
toujours présent devant la télé pour le contrôle et
l'intervention aux cas anormaux.
- Systèmes de vidéosurveillance
analogique avec magnétoscopes traditionnels : Un multiplexeur
peut être connecté entre la caméra et le
magnétoscope permet alors d'enregistrer le contenu de plusieurs
caméras sur un même magnétoscope, mais selon une
fréquence d'image cependant inférieure. La surveillance
vidéo nécessite un moniteur analogique.
- Systèmes de vidéosurveillance
analogique avec enregistreurs numériques (DVR) : C'est un
système analogique permettant l'enregistrement numérique des
images, l'enregistrement
vidéo ne se fait plus sur bandes magnétiques
mais sur des disques durs, où les séquences sont
numérisées et compressées de manière à
emmagasiner chaque jour un maximum d'images.
- Systèmes de vidéosurveillance
analogique avec enregistreurs numériques réseau : C'est
un système de vidéosurveillance analogique passant par un
enregistreur numérique (DVR) réseau est un système en
partie numérique comprenant un enregistreur numérique
réseau connecté via un port Ethernet. La vidéo
étant numérisée et compressée sur l'enregistreur
numérique, les images peuvent être transportées sur un
réseau informatique à des fins de surveillance sur PC distant.
Certains systèmes permettent à la fois la visualisation des
séquences en direct et des séquences enregistrées;
d'autres se limitent aux images enregistrées. Sur certains
systèmes, la surveillance vidéo requiert en outre un client
Windows spécifique, tandis que d'autres nécessitent un simple
navigateur web standard, plus flexible pour une visualisation à
distance.
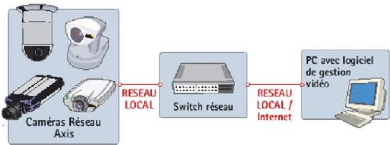
- Systèmes de vidéo sur IP avec serveurs
vidéo Systèmes de vidéo sur IP : Un
système de vidéo sur IP associé à un serveur
vidéo comprend un serveur vidéo, un commutateur réseau et
un PC équipé d'outils de gestion vidéo. La caméra
analogique est branchée sur le serveur vidéo, lequel assure la
numérisation et la compression des séquences vidéo. De son
côté, le serveur vidéo est connecté sur le
réseau qui transporte la vidéo vers un PC ou serveur via un
commutateur réseau. La vidéo est alors enregistrée sur le
disque dur du PC. Il s'agit alors d'un véritable système de
vidéo sur IP.
- Systèmes de vidéo sur IP avec cameras
réseau : Une caméra réseau associe une
caméra et un ordinateur. Permettant la numérisation et la
compression vidéo, elle est en outre équipée d'un
connecteur réseau. La vidéo est acheminée par
réseau IP via les commutateurs réseau, pour être
enregistrée sur un PC/serveur standard à l'aide d'outils de
gestion vidéo. Il s'agit d'un système de vidéo sur IP
à part entière, doublé d'un système
entièrement numérique n'utilisant aucun composant analogique. Les
systèmes de vidéo sur IP reposant sur l'utilisation de
caméras réseau présentent les avantages comme
Caméras haute résolution (mégapixels), alimentation par
câble Ethernet (Power over Ethernet) et réseau sans fil, fonctions
panoramique/inclinaison/zoom, audio, entrées et sorties
numériques sur IP et grandes flexibilité et
évolutivité. La figure suivante y représente un
modèle.
17
Figure 2.3 Réseau de caméra
vidéosurveillance sur IP
18
2.3.3. Systèmes de surveillance à base de
capteurs hybrides
C'est une hybridation entre les deux types car ça
comporte à la fois des capteurs à grandeurs scalaires et des
capteurs multimédia qui peuvent communiquer entre eux, c'est les
nouveaux systèmes récents qui utilisent cette approche, car elle
garantit à la fois la détection rapide fournie par les capteurs
à grandeurs scalaires puisque les données
transférées sont simples (comme la position d'un intrus
détecté par un capteur de mouvement) et aussi une
détection de plus de détails comme la vidéo par des
capteurs multimédia, nous utilisons cette approche pour l'application
que nous voulons concevoir et développer dans notre magistère, et
voilà dans la figure une dessin explicatif à notre application
qu'on veut aboutir.
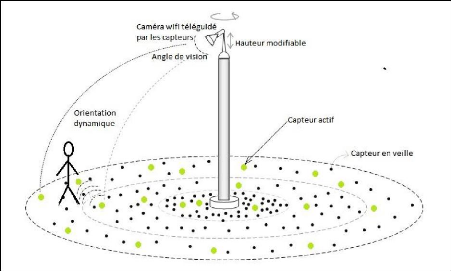
Figure2.3 Exemple illustrant l'objectif de notre application
2.3.3.1 Technique de communications dans les
systèmes hybrides :
Les caméras de surveillance, ou autre noeuds capteurs
multimédia utilisés dans un tel type de réseau communique
avec d'autre type de capteurs à grandeurs scalaires ou stations de bases
(puits) via des communications WiFi ou ZigBee donc
dotés d'un système radio transmission très
évolué. Les noeuds multimédia jouent le rôle de
détection et transmission comme ceux à type de grandeurs
scalaires, la différence réside juste sur le type de
données qui nécessitent dans le cas des capteurs
multimédia un routage et une agrégation particulière de
données, nous allons présenter dans la section qui suit les
caractéristiques des réseaux de capteurs multimédia.
2.4 Caractéristiques des réseaux de
capteurs multimédia
Bien évidemment, les travaux sur les données
multimédia sont différents des travaux sur des signaux
numériques ou analogiques plus simples, comme ceux des premiers
réseaux de capteurs. Ces différences sont dues à la
complexité du signal capturé. En effet, tandis que pour le
codage
19
d'un signal simple tel que le niveau de température ou
la pression, un ou deux octets sont suffisants, le codage d'une donnée
multimédia conduit à l'emploi de plusieurs centaines ou milliers
d'octets. Cette différence de grandeur a des conséquences sur
différents facteurs : capture du signal, besoins en mémoire,
traitement du signal et transmission de données [45].
- Capture du signal : La complexité du
matériel est multipliée par rapport aux captures de
phénomènes simples. En effet, un capteur de caméra CMOS
est normalement composé de nombreux capteurs photosensibles que
capturent les différentes intensités pour chaque pixel. Tandis
que pour la capture d'un signal de lumière un seul photo-capteur est
suffisant pour capturer une image nous avons besoin de beaucoup plus
(normalement un par pixel). Cette évidence entraine avec elle un
coût supplémentaire en énergie et en temps de capture.
- Besoins de mémoire : Comme nous
l'avons dit, tandis que pour le codage d'un signal simple sollicite quelques
bits d'information (de 1 à 8 octets, en fonction de la précision
du capteur), le codage d'une image numérique conduit à l'emploi
de plusieurs centaines ou milliers d'octets. En particulier, la quantité
de m'mémoire n'nécessaire d'dépend principalement de deux
facteurs clés : La résolution de l'image et le format.
- Traitement du signal : Dans les
applications traditionnelles multimédia, il est commun de vouloir faire
des traitements sur les images à la source, afin d'extraire une
information (par exemple : l'emplacement ou la classification d'un objet), ou
de compresser l'image afin de diminuer la quantité de données
n'nécessaires pour la représenter.
- Transmission de données : Comme le
transmetteur radio est l'un des composants les plus gourmands en
énergie, les protocoles de communication ont un rôle important
à jouer pour faire des économies d'énergie.
2.5. L'effet des systèmes de surveillance
Le plus grand effet de la surveillance informatisée est
le grand nombre d'organisations impliquées dans les opérations de
surveillance. L'État et les services de sécurité ont
toujours les systèmes de surveillance les plus performants parce qu'ils
sont protégés par la loi. Le niveau de surveillance
étatique a augmenté, la technologie de nos jours permet de
produire des profils de personnes ou groupes en société à
partir de plusieurs et différentes sources d'information.
Beaucoup de grandes entreprises utilisent des formes
variées de surveillance « passive », dont le rôle
primaire est de surveiller l'activité du personnel qui pourrait avoir un
impact sur leurs opérations et de contrôler les relations
publiques.
Beaucoup d'entreprises vendent ou achètent
l'information, généralement pour des raisons de marketing ou de
publicité.
L'information personnelle est obtenue par surveillance des
petits groupes et individus. La plupart du temps dans un but inoffensif, mais
de plus en plus d'information sensible est obtenue pour des fins criminelles,
comme la carte de crédit et autres types de fraude.
20
2.6. Conclusion
L'émergence des réseaux de capteurs (et
d'actionneurs) sans fil ouvre la voie au déploiement de nouvelles
applications de surveillance et des grands systèmes, notamment ceux qui
s'étendent sur de vastes étendues géographiques et qui
requièrent une configuration à grande échelle.
L'évolution des systèmes de surveillance suit le
rythme de l'évolution technologique en informatique et aux autre
domaines.
Nous avons fait un état de l'art sur les
systèmes de surveillance en général, et
spécialement les systèmes de surveillance multimédia en
les définissant, et en donnant leurs caractéristiques ce qui
montre que c'est un domaine très vaste et très demandé.
Pour notre cas, un système de surveillance hybride nous intéresse
et celui qui comporte des capteurs caméra et capteurs scalaires de
mouvement.
21
Chapitre 3 :
Ordonnancement d'activité de
mise en veille dans les RCSF
3.1. Introduction
Ordonnancement de la mise en veille des capteurs dans un RCSF
est considéré comme étant la technique fondamentale pour
le prolongement de la durée de vie du réseau sans fil, c'est
l'une des problématiques principales dans ce domaine [16], les
réseaux de capteurs sont déployés
généralement d'une façon dense et redondante. En effet,
suivant l'application, on déploiera plus ou moins de capteurs dans le
but d'allonger la durée de vie de l'application. Donc il existe
plusieurs capteurs qui observent une même portion de la zone de
déploiement. Cette redondance est exploitée par l'ordonnancement
d'activité : Ordonnancer l'activité dans un réseau de
capteurs consiste à alterner les charges de façon à
épuiser les noeuds équitablement. Pendant qu'une partie participe
à l'application, les autres sont dans un mode passif ou veille,
économisant ainsi leur énergie [17], et donc la
problématique de redondance dans les réseaux de capteurs est une
partie de celle d'ordonnancement.
3.2. Définition d'ordonnancement
d'activité de mise en veille dans les RCSF
Le déploiement des réseaux de capteurs sur des
zones sensibles ou distantes rend impossible le rechargement des batteries. Il
serait coûteux d'aller renouveler les piles de chaque capteur, et la
source d'énergie conditionne la durée de vie du réseau. Il
existe diverses sources de consommation d'énergie mais les principales
sont liées aux activités de captage et de communication.
L'économie d'énergie obtenue par la mise en
veille alternée des noeuds pour l'observation est variable, alors que le
coût énergétique lié aux communications sans fil est
quant à lui élevé et invariant. Au cours de
l'ordonnancement d'activité, un noeud passif ne communique pas.
Autrement dit, lors des communications radio multi-sauts, les noeuds passifs ne
participent pas aux transmissions, alors que la consommation d'énergie
globale du réseau reste croissante avec le nombre de noeuds actifs.
Lorsqu'un événement se produit sur la zone de
déploiement, il est d'une part inutile d'avoir un nombre
élevé de capteurs qui le surveille et le capte, donc plusieurs
noeuds voulant émettre simultanément pour signaler
l'événement. Il est par conséquent crucial d'ordonnancer
l'activité des capteurs dans le double but d'économiser de
l'énergie et de minimiser les problèmes liés à la
gestion d'une large population d'objets partageant un medium tel que l'air
[17]. Certains noeuds sont donc passifs à un instant donné.
22
3.3. Notion de couverture dans l'ordonnancement
d'activité dans les RCSF
Les rôles de veille et activation sont le plus souvent
alternés de façon à ne pas toujours pénaliser les
mêmes noeuds du réseau. Il se pose souvent la question de la mise
en veille et surtout du réveil. Comment un noeud qui a éteint sa
radio peut-il se réveiller? Si la synchronisation en temps existe, le
noeud peut programmer son réveil ultérieur tandis que d'autres
solutions envisagent de ne réveiller des noeuds que lorsqu'un
événement se produit [18].
La réduction de la redondance est déterminante
mais selon quel critère peut-on ordonnancer l'activité ?
L'ordonnancement ne doit pas mettre en risque l'application en cours. Nous
souhaitons ordonnancer les activités des capteurs de façon
à ce que l'ensemble des capteurs actifs soit capable d'observer une zone
aussi large que celle couverte par l'ensemble des capteurs
déployés. La figure (3.1) nous montre un réseau de
capteurs déployé sur une zone à surveiller. Cette
surveillance ne nécessite pas une activité permanente de la part
de tous les noeuds comme illustré sur la figure où seul un
sous-ensemble des capteurs suffit à une surveillance complète de
la zone.
Non seulement nous souhaitons que la zone
d'intérêt soit totalement couverte par ce sous ensemble mais
également qu'il soit connecté, c'est à dire que les
communications multi-sauts soient possibles entre toute paire
d'éléments du réseau.
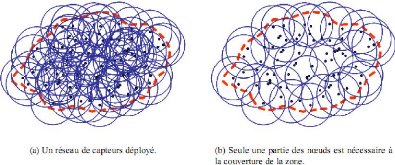
Figure 3.1 Ordonnoncement d'activité avec le
critère de couverture
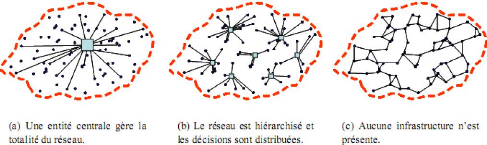
3.4. Approches de gestion de l'ordonnancement
L'ordonnancement d'activité peut se faire de diverses
façons. Nous pouvons les classifier en approches centralisées
où une entité centrale connaît chaque noeud et est
capable gérer chaque noeud pour lui assigner ses tâches, des
approches hiérarchiques, une vision hiérarchisée
du réseau où l'autorité centrale est partagée sur
plusieurs entités responsables d'une sous-partie du réseau et des
approches localisées, par conséquent totalement
décentralisées, dans lesquelles un comportement global
cohérent doit être obtenu à partir de décisions
prises localement [17].
3.4.1. Approche centralisée
Dans les solutions d'ordonnancement centralisées,
l'existence d'une entité centrale qui gère tout le réseau
est primordiale, peut ainsi assigner à chaque noeud un rôle. Les
changements de topologie dus aux éventuelles pannes ou à la
mobilité des noeuds sont conçus de façon à pouvoir
en informer
les noeuds concernés. On trouve ce genre d'utilisation
dans les applications de domotique où les capteurs sont chargés
de fournir des informations au contrôleur central lui-même
chargé de réguler les différents appareils de la maison
(climatisation, Rideaux, lumières, Micro-ondes, douches ...). Ces
solutions d'ordonnancement ne sont donc adaptées que lorsque
l'environnement peut être atteint et qu'une infrastructure existe ou peut
y être déployée.
3.4.2. Approche hiérarchique
Dans une approche hiérarchique, le réseau est
organisé en sous-ensembles qui doivent s'autogérer. Pour cela,
diverses solutions existent telles que l'élection de chefs de ces
sous-ensembles ou ce dernier peut être élu des différents
noeuds du sous-ensemble, de façon à répartir la charge et
à équilibrer les ressources disponibles. Dans ce type
ordonnancement, les informations de changements de topologie ne sont
distribuées qu'au sein des sous-ensembles. Ceci en fait des solutions
plus favorables au passage à l'échelle. Contrairement à
une approche centralisée ou la complexité exponentielle serait
accumulée dans une seule entité, elle serait ici répartie
sur les différents sous-ensembles du réseau. Il reste
néanmoins le problème de gérer les appartenances à
ces sous-ensembles et le passage éventuel de l'un à l'autre
surtout en cas de pannes
3.4.3. Approche localisée
Les approches localisées (plates) ne reposent sur
aucune infrastructure, leurs objectif est d'obtenir un comportement global
homogène à partir de comportements individuels ou chaque noeud
décide de sa propre activité en ne se basant que sur
l'observation de ses propres adjacents (à un saut ou à k-sauts).
Aucune hiérarchie ni infrastructure n'existe et le comportement de
chaque noeud n'est influencé que par ceux de ses voisins directs. Les
changements de topologie du réseau dus à la mobilité ou
aux pannes ne sont par conséquent considérés par les
noeuds que comme de simples modifications de leurs voisinages. Ceci permet
d'obtenir des solutions robustes plus générales, adaptables et
surtout passables à une grande échelle, aspect extrêmement
important dans des réseaux où les densités
évoquées peuvent être d'une centaine de noeuds par zone de
communication. C'est pourquoi nous voyons que ces approches localisées,
totalement décentralisées sont plus généralisables
et plus adéquates à notre objectif, celui de surveiller une large
zone frontalière d'un pays. La figure 3.2 suivante illustre les trois
approches de gestion d'ordonnancement d'activités dans les
réseaux de capteurs sans fils.
23
Figure 3.2 Approches de gestion d'ordonnoncement
d'activité dans les RCSF
24
3.4. Algorithmes d'ordonnancement d'activité
dans les RCSF :
L'activité des capteurs est ordonnancée en
fonction du critère de couverture de surface ou les noeuds doivent
coopérer et s'organiser de façon à ce que ceux qui
décident de se mettre en état actif couvrent une surface en tout
point équivalente à celle couverte par tous des capteurs. Pour ce
faire, les noeuds nécessitent l'évaluation de la couverture de la
zone de surveillance qui soit dans leur rayon de surveillance ou de celui des
leurs voisins. Nous supposons ici qu'un noeud doit calculer le taux de
couverture fourni par des voisins dont il connaît la position et le rayon
de surveillance. Différentes méthodes ont déjà
été proposées dans la littérature et nous en
faisons un résumé.
Les algorithmes d'ordonnancement d'activités
détectent d'abord les capteurs redondants du réseau, leurs
appliquent une stratégie d'ordonnancement, pour les faire passer du mode
actif au mode veille danse le but d'optimiser la consommation d'énergie
et maximiser la durée de vie du réseau. Nous citons dans ce qui
suit quelques algorithmes et techniques de quelques travaux récents :
a) Balanced Energy-based Sleep Scheduling (BS)
:
Dans [19,21], les auteurs ont mis au point une technique
d'ordonnancement de mise en veille équitable basé sur
l'énergie (BS). Le schéma de probabilité d'arrêt est
conçu de façon à répartir la consommation de
l'énergie de la détection et des tâches de transmission
uniformément entre tous les noeuds capteurs sans fil. La consommation de
l'énergie est contrôlée sur la base de la distance des
capteurs du chef du cluster. Par conséquent, la stratégie peut
être considérée comme un cas particulier de la
programmation basée sur la distance. Dans le schéma BS, les
auteurs ont également étudié le coefficient de variation
de la consommation d'énergie par noeud. Les expériences montrent
de meilleurs résultats pour les BS par rapport à la programmation
basée distance, simple.
b) Linear Distance-based Scheduling (LDS) :
Dans [20], la technique d'ordonnancement basé sur une
distance linéaire (LDS) est prévu pour l'adaptation des
périodes de veilles pour les capteurs dans une haute densité ou
redondance. L'idée générale du projet est de mettre les
capteurs en veille avec une probabilité plus élevée que la
distance de la densité la plus proche augmente. La probabilité de
la mise en veille est donc calculée en fonction de la distance d'un
capteur à partir de sa tête de grappe. La simulation donne des
résultats surpassant pour LDS en termes de durée de vie du
réseau par rapport au schéma randomisé (RS). Toutefois, en
gardant la tête du cluster de noeuds éveillé tout le temps
augmente les chances de collision et l'écoute ralenti. Afin de
répondre à ce problème Buddha Singh et K. Lobiyal
[21] ont proposé une nouvelle programmation de mise en veille
basé sur la densité de déploiement Gaussien.
c) Connectivity-based Partition Approach (CPA)
:
Une méthode d'ordonnancement de mise en veille et de
connectivité basée sur l'approche de la partition(CPA), qui est
l'algorithme distribué heuristique, est développée dans
[22]. La méthode d'ordonnancement partitionne les capteurs
déployés en groupes sur la base de la connectivité par
paires (entre les noeuds) des endroits plutôt géographiquement. La
connectivité du réseau est maintenue par les capteurs actifs de
chaque partition à la fois. En outre, les capteurs gardent l'alternation
entre état actif et sommeil périodiquement pour équilibrer
la charge de l'énergie. La
25
simulation des résultats ont montré que CPA a
une meilleure adaptabilité aux environnements où la propagation
radio est généralement non homogène.
d) Data-Coverage Sleep Scheduling (DCS) :
Une nouvelle approche d'ordonnancement de mise en veille pour
assurer la couverture (DCS) est fournie dans [23], ce dernier garantit non
seulement la réduction de la consommation d'énergie mais aussi
tente de récupérer les pertes de données dues à des
noeuds dans l'état de sommeil. Le système permet aux noeuds
actifs de retrouver les données manquantes des noeuds endormis en
exploitant la corrélation spatio-temporelle. En outre, un algorithme de
réduction est utilisé pour sélectionner l'ensemble des
noeuds actifs. Les simulations montrent une amélioration des
performances de DCS à l'égard de régime de couverture
complète de la région.
e) Range Based Sleep Scheduling (RBSS) :
Une autre technique d'ordonnancement de mise en veille est
décrite dans [24] pour conserver l'énergie tout en conservant la
couverture du réseau. Le système RBSS, n'a pas besoin des
informations de localisation des capteurs mais plutôt à la
distance du capteur à capteur. Schéma d'ordonnancement divise le
temps en périodes de longueur fixe appelés Round. Dans chaque
round, un protocole de recrutement pour sélectionner un ensemble de
capteurs co-travailleurs. Tous les autres que le maître, les noeuds
co-travailleurs sont mis en veille pour réduire la consommation
d'énergie. Les résultats montrent que RBSS avec moins de capteurs
actifs est mieux que ceux basés sur la localisation.
f) Garg-Konemann (GK) scheme and linear programming
duality :
Dans [25], l'ordonnancement de la mise en veille est
modélisé comme sous problème de partitionnement en
exploitant la relation de redondance par paires entre les noeuds capteurs.
Cette approche distribuée utilise un algorithme d'approximation qui est
basé sur le schéma Garg - Konemann (GK) et programmation
linéaire. Le schéma GK comprend en outre un algorithme
distribué asynchrone qui permet d'approximation du problème du
sous graphe minimum de valeur supérieur (Problème MWDS).
g) Distributed Sleep Scheduling Algorithm with Range
Adjustment (DSRA) :
Pour éviter la assurer la couverture et de prolonger
durée de vie du réseau, les auteurs de [26] ont
présenté un algorithme d'ordonnancement de mise en veille avec
ajustement d'échelle (CSRD). C'est basé sur l'énergie
résiduelle d'un noeud capteur ainsi que la taille de la région de
entre le noeud et ses voisins. En outre, la communication est assurée
entre les noeuds actifs et ajustés de façon à fournir une
couverture complète. Les résultats de simulation fournissent de
meilleurs résultats par rapport aux techniques de couverture
aléatoire.
3.4. Conclusion
De par leur taille miniaturisée, les capteurs sans fil
sont fortement contraints en énergie, imposant une gestion
raisonnée du réseau qu'ils peuvent former grâce à
leur capacité de communication sans fil. Le déploiement de ces
réseaux sur des zones sensibles ou distantes rend impossible le
rechargement ou le remplacement des batteries. Il est donc crucial
d'ordonnancer l'activité des capteurs ; Pendant qu'une partie des objets
participe à l'application, les autres sont dans un mode
26
passif, peu consommateur de ressources. Le critère de
choix des noeuds actifs est celui de la couverture de surface : l'ensemble des
capteurs actifs doit être capable d'observer une zone aussi large que
celle couverte par l'ensemble des capteurs déployés. Nous avons
présenté dans ce chapitre les approches d'ordonnancement
d'activité dans les RCSF, leurs classifications et quelques travaux de
recherche publiés sur ce sujet.
27
Chapitre 4 :
Techniques de détection de la
redondance dans les RCSF
4.1. Introduction
Les applications des réseaux de capteurs ont tendance
à déployer aléatoirement de plus en plus de noeuds que
nécessaire pour assurer la couverture complète de la zone
d'intérêt. Cet excès conduit à une redondance de
capteurs, c'est-à-dire qu'il y a des régions surveillées
par plusieurs capteurs au même temps, il s'agit de la redondance
spatiale. Il existe d'autres sortes de redondances, notamment la redondance
temporelle qui consiste à exécuter une action plus d'une fois
dans le temps, et la redondance d'information qui introduit une redondance dans
la représentation de l'information, en ajoutant des données
redondantes, tel que les bits de parité qui permettent de
détecter les erreurs.
Le problème de détection de la redondance
n'existe pas dans la littérature de manière singulière car
il est traité comme étant un sous problème des protocoles
de relocalisation dans les réseaux de capteurs mobiles [27, 28, 29] et
surtout d'ordonnancement d'activités des capteurs dans les
réseaux de capteurs statiques [30, 31, 32, 33].
Les algorithmes d'ordonnancement d'activités
détectent d'abord les capteurs redondants du réseau, ensuite, ils
appliquent à ces capteurs un schéma d'ordonnancement, pour les
faire passer du mode actif au mode veille, et ceci dans le but d'optimiser la
consommation d'énergie pour maximiser la durée de vie du
réseau.
Nous avons cité dans le premier chapitre la
contribution de la redondance des capteurs pour le prolongement de la
durée de vie des réseaux de capteurs, nous allons
présenter dans ce chapitre la manière que cette redondance est
évaluée sachant que nous nous intéressons à la
redondance de couverture, qui est engendrée par la présence de
plusieurs capteurs au même endroit de la zone d'intérêt,
nous nous intéressons sur les méthodes de détection de la
redondance proposées avec leurs schémas d'ordonnancement et enfin
nous proposons une classification selon l'approche adoptée pour
l'évaluation de la redondance.
4.2. Modélisation d'un réseau de
capteurs
Cette section présente la modélisation d'un RCSF
adoptée par les travaux présentés dans ce chapitre. Un
réseau sans fil est représenté par un graphe G = (V,
E), avec V l'ensemble des noeuds
du réseau et 2l'ensemble des
arêtes donnant les communications possibles : il existe une
paire ordonnée (u,v) E si le noeud « u
» est capable de transmettre des messages à « v » [34].
Chaque capteur possède une portée de communication notée
Rc, ainsi qu'une portée de couverture
R5.
Il y a plusieurs modèles de couverture proposés
dans la littérature. Dans [35], l'auteur recense les modèles
suivants : le modèle de couverture booléen appelé plus
communément le modèle du disque unitaire (ou bien
déterministe), le modèle de couverture atténué et
le modèle de couverture tronqué. Dans le contexte des travaux
portant sur les problèmes de couverture dans les RCSF, le modèle
le plus utilisé est le modèle du disque unitaire. Dans ce
modèle, il est supposé que deux noeuds peuvent communiquer si la
distance qui les sépare est inférieure à
Rc. D'où, l'ensemble E peut être défini
comme suit :
E = {(u, v) V2 | u?v?dist(u, v) =
Rc }
La zone de surveillance d'un noeud S(i)est la surface
observable par le noeud. La forme de S(i) dépend du capteur
proprement dit et il est difficile de la caractériser car elle
dépend du matériel utilisé [36]. La majorité des
travaux existants dans la littérature considère que S(i)
correspond à un disque de centre « i » et de rayon
R5 :
S(i) = {p A |dist(i, p)
=R5}, où p est un point de la zone de
déploiement notée A.
4.3. Notion de couverture de zone dans les RCSF
La couverture de zone (Figure 4.1) veut dire que nous voulons
déployer un réseau de capteurs pour couvrir tous points de la
zone d'intérêt à couvrir. Cela veut dire que si on prend
n'importe quel point de la zone d'intérêt, ce dernier doit
être couvert par au moins un noeud capteur. Ce type de couverture est
utilisé généralement dans la majorité des
applications, telles que la surveillance de forêts pour détecter
d'éventuels incendies et la surveillance de champs de bataille. Pour
établir une couverture de zone on doit déployer les noeuds soit
de façon aléatoire ou déterministe et, pour cela, il faut
répondre à la question suivante : quel est le nombre minimum de
capteurs faut-il utiliser tout en garantissant un taux de couverture maximum
[37] sans oublier que les noeuds proches des station de bases sont plus
sollicité pour la transmission des donnée que d'autres noeuds
relativement loin donc, il faut déployer plus des noeuds dans des
régions proches des stations de base.
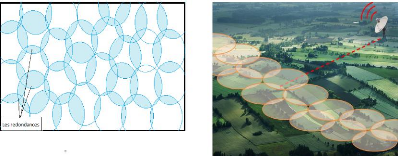
Figure 4.1 Couverture de zone
d'intérêt
28
29
4.4. Définition de la redondance
Chaque méthode de détection de la redondance
emploie une procédure spécifique pour évaluer la
redondance d'un capteur, néanmoins le critère de redondance est
le même pour toutes ces méthodes ; un noeud est redondant si sa
zone de surveillance est couverte par les zones de surveillance de ses voisins.
Ce critère peut être formalisé de la façon suivante
:
Un noeud est complètement redondant si UJN E (
j) S(i) _CS(j) tel que S(i), S(i) est la zone de surveillance
du capteur « i » et « j » respectivement
étant j les voisins de i.
Nous avons remarqué que l'ensemble N(i) est
défini de deux façons dans les travaux portant sur les
problèmes de couverture en tant que la distance séparant le noeud
« i » de ses voisins est inférieure au rayon de
couverture Rs ou bien inférieure à deux fois le rayon
de couverture 2Rs;
Il existe aussi la redondance partielle qui est
utilisée par la classe d'applications qui tolèrent la
présence de quelques régions vides dans la zone
d'intérêt [30].
4.5. Classification des méthodes de
détection de la redondance
Les méthodes que nous allons présenter dans
cette section sont à l'origine intégrées avec des
algorithmes d'ordonnancement d'activités, en tant qu'étape en
début du schéma d'ordonnancement. L'ordonnancement
d'activités dans un réseau de capteurs consiste à alterner
les charges de façon à épuiser les noeuds
équitablement. Pendant qu'une partie participe à l'application,
les capteurs redondants sont dans un mode passif, économisant ainsi leur
énergie.
L'ordonnancement d'activités des capteurs doit
toutefois préserver le but essentiel du réseau, en faisant en
sorte que quel que soit l'état des capteurs la zone
d'intérêt doit être couverte le plus complètement
possible [38, 39]. De plus, l'efficacité d'un algorithme
d'ordonnancement dépend largement de l'efficacité de l'algorithme
de détection de la redondance, c'est pour cette raison que ces derniers
visent à détecter un nombre maximum de capteurs redondants. Etant
donné que nous nous intéressons au problème de
détection de la redondance, nous allons donc étudier les
méthodes utilisées avec les algorithmes d'ordonnancement, et
proposer une classification de ces méthodes selon l'approche
utilisée pour déterminer la redondance des capteurs. Nous
distinguons deux approches, à savoir : l'approche
géométrique et l'approche analytique. Dans chaque approche, nous
avons également catégorisé les travaux proposés
selon la technique employée pour la détection de la redondance
des capteurs, voici dans la figure 4.2 qui suit une classification des
méthodes de détection.
Méthodes de détection de la
redondance dans les réseaux de
capteurs
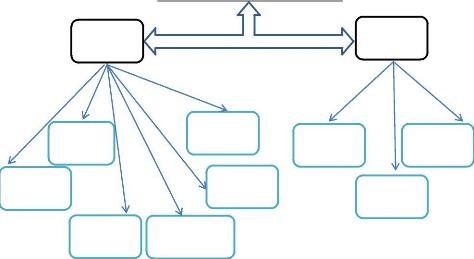
La couverture de périmètre
Les secteurs sponsorisés
Approche géométrique
La méthode des grilles
Couverture des
points
d'intersection
La méthode
de
sectorisation
Les sommets de Voronoi
La méthode de Wu et al
La méthode de Bulut et al
Approche analytique
La méthode LUC
30
Figure 4.2 Classification des méthodes de détection
de redondance dans les RCSF. 4.5.1. L'approche
géométrique
Les techniques de détection de la redondance qui se
base sur la géométrie prennent comme données les
informations de localisation des noeuds capteurs et se basent sur des calculs
géométriques pour formaliser le problème afin de
détecter la redondance :
a) La technique des secteurs sponsorisés
:
Tian et al. [40] proposent le modèle des secteurs
sponsorisés pour la détection des capteurs redondants. Dans ce
modèle, un capteur «Si » est appelé sponsor du capteur
«Sj » si la distance qui les sépare est inférieure au
rayon de surveillance Rs, autrement
d(Si, Sj) =
Rs, ici l'intersection est représentée
sur forme de secteurs car c'est plus facile de calculer sa surface. La
règle de redondance avec les secteurs sponsorisés est comme suit
: Si l'union des secteurs sponsorisés des sponsors d'un capteur atteint
2ð , alors le capteur est redondant. Les auteurs dans [41] soulignent une
limite de la méthode des secteurs sponsorisés dans le fait
qu'elle considère seulement les voisins se trouvant dans la zone de
couverture du capteur voulant évaluer sa redondance.
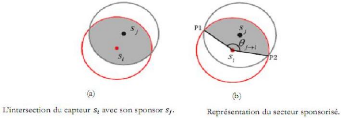
31
Figure 4.3 Représentation des secteurs
sponsorisés.
b) La technique de couverture de périmètre
:
La technique de couverture se base sur la valeur de la
couverture de périmètre des voisins du capteur voulant
évaluer sa redondance ou sur la couverture de périmètre
des segments des voisins, parmi les méthodes qui utilisent cette
technique on cite la méthode de périmètre couvert, la
méthode de Jiang et al et la méthode de Huang et al. La
règle de la redondance dans ce cas est que si la valeur de la couverture
de périmètre des voisins ne change pas en supprimant le capteur
Si alors il est redondant.
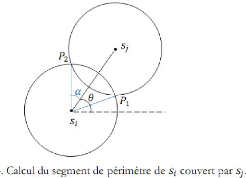
Figure 4.4 Couverture de périmètre
c) La technique des grilles :
Elle constitue une démarche simple de détection
de la redondance des capteurs, dans laquelle chaque capteur maintient une liste
des points de la grille se trouvant dans sa zone de couverture. Si ces points
sont couverts par ses voisins actifs, donc le capteur est redondant. Comme
indiqué sur la figure 4.5, les points de la grille
représentés par des cercles gras sont couverts par le capteur S1
et ces mêmes points sont également couverts par ses voisins. Le
capteur est redondant si ses voisins sont actifs. Parmi les méthodes qui
utilisent cette technique, nous citons la méthode de Bai et al ou il
s'agit de vérifier que chaque point de la grille appartenant à la
zone de surveillance du noeud est couvert par au moins un voisin en comparant
la distance qui sépare chaque point de la grille des capteurs voisins,
si cette distance est inférieure au rayon de surveillance alors le point
est couvert.
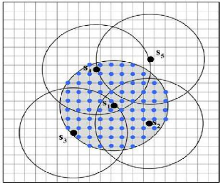
32
Figure 4.5 : Utilisation de l'approche en grilles pour la
détection de la redondance [35].
Nous citons aussi la méthode SCRC (Self Calculated
Redundancy Check) de Sakib qui introduit le concept de la ?-redondance,
qui stipule que si un point qi est couvert par au minimum ?+1 noeuds alors i
est ? redondant.
d) La technique de couverture des points d'intersection
:
Wang et al. se basent sur la couverture des points
d'intersection entre les voisins d'un noeud pour déterminer sa
redondance. L'intersection des zones de couverture de deux capteurs
créent deux points d'intersection sur leurs périmètres de
couverture. Les points d'intersection considérés par cette
méthode sont les points se trouvant à l'intérieur de la
zone de couverture du capteur voulant évaluer sa redondance. Si tous les
points d'intersection se trouvant dans la zone de couverture du capteur sont
couverts, alors il est redondant.
Wueng et al. proposent l'algorithme EKE (Efficient
K-CoverageEligibility) qui permet de réduire la complexité
des calculs en considérant de vérifier la couverture de quelques
points d'intersection candidats au lieu de tous les points se trouvant dans la
zone de couverture du capteur calculant sa redondance, les auteurs proposent
aussi l'algorithme AKCE (Accurate K-CoverageEligibility) basé
sur la découverte d'une petite surface de décision à
l'intérieur de la zone de couverture de chaque capteur.
e) La méthode RSE :
Carbunar et al. [01] utilisent le concept des diagrammes
Voronoi pour détecter la redondance d'un capteur, et formalisent le
problème d'élimination des noeuds redondants (RSE- Redundant
Sensor Elimination) en proposant une solution basée sur le pavage de
Voronoï. Le diagramme de Voronoi, parfois appelé tessellation de
Dirichlet, est une des structures géométriques les plus
importantes en pratique. Il peut être informellement défini comme
étant un partitionnement de l'espace en régions, où
chacune de ces régions est le lieu de points de R2 le plus
proche d'un objet donné P que de tout autre objet Q dans R2.
Le diagramme de Voronoi d'une collection de noeuds partitionne l'espace en
polygones. Les côtés d'un polygone de Voronoi sont définis
par les bissectrices verticales des lignes reliant le noeud enveloppé
par ce polygone aux autres noeuds voisins. La figure 4.7 montre un exemple d'un
polygone de diagramme de Voronoi.
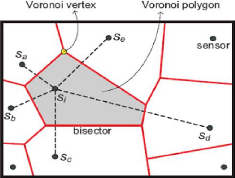
33
Figure 4.6. Diagramme de Voronoi
La règle de redondance de la méthode RSE est
comme suit : Un capteur s est redondant si et seulement si tous ses 2-VV (les
sommets des régions de type 2-Voronoi) et 2-VIP (l'intersection entre
une arête de la région 2-Voronoi de et le périmètre
de la zone de surveillance) sont couverts par ses voisins Voronoi.
f) La technique de sectorisation :
Khedr et al. proposent l'algorithme de découverte de la
redondance (the redundant discovery algorithm), qui détermine la
redondance d'un capteur en effectuant une sectorisation de sa zone de
couverture en six secteurs et en testant la couverture de chaque secteur. La
règle de redondance de cette technique est comme suit : un capteur est
redondant si ses secteurs ( Secti C {1,..,6} (Si) ) sont couverts par la zone
de surveillance de ses voisins.
En divisant la zone de surveillance en six secteurs
égaux d'un angle de 60°, les auteurs ont prouvé qu'un
secteur est couvert s'il contient un capteur à l'intérieur.
Toutefois, il se peut que le secteur soit couvert même s'il ne contient
pas de capteur à l'intérieur, dans ce cas il suffit de
vérifier la couverture de la frontière du secteur (i.e. la
distance entre chaque point de la frontière et le noeud voisin est
inférieure à ). Si les points frontières du secteur sont
couverts par le même noeud, alors le secteur est couvert par ce noeud.
Sinon, le secteur est divisé en deux sous-secteurs égaux et les
mêmes étapes sont répétées jusqu'à
atteindre un secteur avec un angle limite.

Figure 4.8 Méthode de sectorisation
La découverte de la redondance se base sur la
couverture des secteurs. L'algorithme de découverte de la redondance est
exécuté par chaque noeud et passe par trois phases :
? Phase 1 : le noeud envoie un message à ses voisins
contenant sa position ; ? Phase 2 : Le noeud divise sa zone de surveillance en
six secteurs ;
? Phase 3 : Pour chaque secteur, il considère qu'il est
couvert s'il a un capteur à l'intérieur, sinon le noeud
exécute les étapes suivantes :
o
34
Si les points frontières du secteur sont couverts par le
même noeud, alors le secteur est couvert par ce noeud ;
o - Sinon, les étapes suivantes sont
répétées jusqu'à ce que l'angle du secteur atteigne
un seuil :
- Le secteur est divisé en deux sous-secteurs égaux
;
- La couverture des points de la frontières du
sous-secteur est vérifiée ;
- Si tous les points de la frontière sont couverts,
retourner à (i). Sinon le noeud n'est pas redondant.
4.5.2. L'approche analytique
Les méthodes basées sur l'approche analytique
n'utilisent aucune information de localisation pour la détection de la
redondance, et ne requièrent pas non plus la connaissance des
informations directionnelles ni la distance séparant les capteurs. Elles
se basent seulement sur le nombre de voisins à un saut du capteur
voulant évaluer sa redondance, et assument l'existence d'un
mécanisme qui permet aux noeuds de connaitre leur nombre de voisins
à un saut, par exemple en envoyant des messages hello (beacons)
contenant seulement l'identifiant des noeuds.
Ces méthodes se basent sur un modèle de calcul
probabiliste pour décrire la redondance des capteurs. L'utilisation du
calcul probabiliste permet seulement d'estimer la redondance partielle des
capteurs et non pas complète.
a) La méthode de Wu et al. :
Les auteurs dans [30] introduisent une formule simple pour
estimer la redondance des capteurs, en définissant une borne
inférieure et supérieure de la probabilité d'une
redondance complète d'un capteur. Ils estiment également la
probabilité d'une redondance partielle donnent une bonne heuristique
pour l'estimation du nombre de voisins nécessaires pour obtenir une
certaine redondance.
b) La méthode de Bulut et al. :
Cette méthode estime la redondance des capteurs en
calculant le ratio du capteur couvert par ses voisins [33]. Les auteurs
estiment qu'en connaissant seulement le nombre de ses voisins, un capteur est
en mesure de calculer Pn (i).
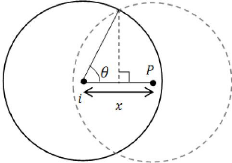
35
Figure 4.9 Méthode de Bulut et al [33]
c) La méthode LUC :
Younis et al. [44] proposent la méthode LUC (Location
Unware Coverage) qui se base sur quatre tests pour vérifier la
redondance d'un capteur. Deux tests (RTest-D1 et RTest-D2) sont
géométriques, tandis que les deux autres tests (RTest-H1 et
RTest-H2) sont destinés à un déploiement dense. Pour
déterminer la redondance d'un noeud, la méthode exploite les
distances séparant ce noeud de ses voisins. Les auteurs assument qu'un
noeud peut estimer les distances le séparant de ses voisins à un
saut en utilisant quelques approches connues, telle que la force du signal RF
reçu minimale parmi ses voisins.
La procédure de vérification de la redondance se
déroule selon l'ordre cité ci-dessus. Si le résultat d'un
test détermine que le noeud est redondant, la procédure de
vérification est terminée et le noeud passe à
l'état passif. Par contre, si tous le résultat de tous les tests
est négatif le noeud n'est pas redondant (état actif).
4.6. Discussion
Les méthodes présentées dans ce chapitre
possèdent toutes le même critère de redondance : Un capteur
est redondant si sa zone de surveillance est couverte par la zone de
surveillance de ses voisins. Néanmoins, chacune de ces méthodes
s'appuie sur une règle, un modèle et des hypothèses
spécifiques pour la détection de la redondance.
La méthode des secteurs sponsorisés suppose que
Rc= Rs, ce qui limite le nombre de capteurs redondants
pouvant être détectés par l'algorithme. Pour cela, toutes
les méthodes qui lui ont succédées se sont basées
sur l'hypothèse que 2Rs= Rc, afin d'augmenter le
nombre de voisins impliqués dans le calcul de la redondance pour
maximiser la couverture des noeuds. Par conséquent, le nombre de
capteurs redondants détectés par ces méthodes est plus
important par rapport à la méthode des secteurs
sponsorisés.
La méthode de couverture de périmètre se
base sur l'évaluation de la couverture de périmètre des
voisins du capteur évaluant sa redondance (Si). Il existe deux variantes
de cette méthode, la première variante évalue la
couverture de tout le périmètre des voisins à un saut de
Si, ce qui rend les calculs géométriques plus complexes. Par
contre, la deuxième variante repose seulement sur la couverture de
périmètre des segments des voisins se trouvant dans la zone de
surveillance de. Cette
36
classe de méthodes offre la possibilité de
détecter la redondance des capteurs tout en répondant au
degré de couverture exigé par l'application.
La précision des méthodes basées sur la
structure en grilles de la zone d'intérêt dépend de la
longueur des cellules de la grille. Plus la taille de la cellule est
réduite plus le nombre de capteurs détectés diminue, car
le calcul de la redondance devient plus restrictif. Nous pouvons dire alors que
ce critère de redondance n'est pas objectif, car la longueur de la
cellule conditionnera le nombre de capteurs détectés par ces
méthodes. De plus, cette approche doit spécifier la couverture de
chaque point de la grille de la zone de couverture du capteur évaluant
sa redondance par chacun de ses voisins, ce qui est couteux en termes de temps,
de calcul et de sauvegarde.
La méthode des points d'intersection ramène le
problème de détection de la redondance au calcul du degré
de couverture des points d'intersection. L'algorithme peut dynamiquement
configurer le réseau pour fournir des degrés de couverture
différents suivant le besoin de l'application. Toutefois, la
complexité de calcul est O(N3), avec le nombre de voisins se
trouvant à une distance 2Rs du noeud évaluant sa
redondance.
La méthode RSE utilise un outil de modélisation
géométrique, les diagrammes Voronoi, pour formaliser le
problème de détection de la redondance. Avec cette
méthode, un noeud détermine sa redondance en communiquant
seulement avec ses voisins Voronoi, ceci fait que l'algorithme RSE
détecte avec précision tous les noeuds redondants du
réseau. Si le nombre des voisins Voronoi est N alors la
complexité de l'algorithme est O(NLogN). En revanche, cette
méthode induit un overhead supplémentaire pour deux raisons ; la
première raison est la maintenance régulière des cellules
Voronoi par les noeuds du réseau, la seconde raison est l'overhead
initial engendré lorsque chaque noeud est contraint à
découvrir ses voisins Voronoi et calculer sa cellule Voronoi.
La classe de méthodes de l'approche analytique aborde
le problème de la redondance d'un point de vue mathématique, en
proposant un modèle qui ne nécessite pas la connaissance des
informations de localisation des capteurs du réseau. Ainsi, la
redondance d'un capteur est déterminée en fonction du nombre de
ses voisins [30, 33] ou bien de la distance le séparant de ses voisins
[44]. Pour cela, ces méthodes ne parviennent à détecter
que la redondance partielle des capteurs. En effet, il est assez difficile de
vérifier la redondance complète d'un capteur donné sans
disposer des informations de localisation, par conséquent cette classe
de méthodes est restreinte à des applications qui ne sont pas
critiques dans lesquelles l'existence de certains points de la zone
d'intérêt non couverts peut être tolérable.
Les auteurs dans abordent le problème
d'interdépendance de la redondance des capteurs redondants du
réseau d'un point de vue différent, en proposant de
sélectionner l'ensemble maximal indépendant (MIS) à partir
du graphe de redondance du réseau. Cette solution emploie une
heuristique pour trouver une approximation de l'ensemble maximal. Cette
heuristique se base sur une intuition simple : le noeud redondant ayant le plus
petit degré dans le graphe de redondance est sélectionné
pour être désactivé ; puisque l'élimination de ce
noeud annulera la redondance d'un nombre minima de noeuds redondants. Cette
solution a l'avantage de ne pas nécessiter une synchronisation en temps
global ni un échange de messages de contrôle.
Nous avons remarqué que la majorité des travaux
utilise une approche géométrique pour la détection des
capteurs redondants, car cette approche se base sur des calculs
géométriques précis et
37
garantit la détection d'une redondance complète,
contrairement à l'approche analytique qui se base sur des heuristiques
pour estimer une redondance partielle des capteurs, ce qui ne permet pas de
préserver la couverture complète de la zone
d'intérêt surtout dans notre cas d'une application de surveillance
militaire qui nécessite une garantie de couverture.
4.7. Conclusion
Dans ce chapitre, nous avons étudié les
méthodes de détection de la redondance des capteurs. Cette
étude nous a permis de dégager deux grandes approches
adoptées par ces méthodes, et de proposer une classification des
techniques employées pour la détection de la redondance. Sur la
base de cette classification, nous avons effectué une comparaison
qualitative de ces méthodes en termes de quelques critères
jugés pertinents. Par ailleurs, la détection de la redondance ne
s'arrête pas à un calcul localisé au niveau de chaque
noeud.
Les noeuds redondants doivent coopérer dans leur
décision de redondance avec la contrainte de préserver la
couverture de surface. Les recommandations tirées de cette étude
constituent une base pour la conception d'une méthode de
détection de la redondance. Dans le cadre du magister, nous voulons
introduire l'idée de mettre en oeuvre une solution basée sur la
théorie de feedback control ; une piste que nous pouvons
creuser davantage. Nous présentons cette théorie comme suit :
a) Définition la théorie du
contrôle:
Le concept de rétroaction vient de la
cybernétique et s'est ensuite propagé dans d'autres domaines car
il est initialement appliqué aux systèmes physiques. On y parle
de boucle de rétroaction (feedback loop) lorsqu'il y a retour
d'une information vers un centre de décision situé en amont, qui
peut ainsi agir sur le processus considéré en connaissance de
cause [46].Dans toute boucle de rétroaction, des informations sur les
résultats d'une action sont renvoyées à l'entrée du
système sous forme de données, donc l'état du
système actuel dépend de son état antérieur. Le
schéma fonctionnel d'un système de contrôle par
rétroaction est représenté dans la figure suivante :
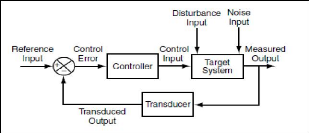
Figure 4.10 Schéma fonctionnel d'un système de
contrôle par rétroaction.
b) Difficulté à faire appliquer la
théorie du contrôle aux systèmes informatiques
:
Malheureusement, la théorie du contrôle est
rarement utilisée par les professionnels de l'informatique. Les
chercheurs voient trois grands domaines de difficultés dans
l'application de la théorie du contrôle sur les systèmes
informatiques : 1) l'élaboration de critères d'évaluation
pour les contrôleurs à rétroaction, 2) la construction des
modèles pour le système cible et le contrôleur, et 3) la
conception des contrôleurs par rétroaction [46].
38
La question fondamentale concerne les critères
d'évaluation des contrôleurs. La recherche met l'accent sur un
contrôle réglementaire, un problème de contrôle
relativement simple avec une large application aux systèmes
informatiques. De plus, la stabilité, l'erreur statique
(précision), et la performance transitoire (en particulier, le temps de
stabilisation et dépassement).
Il y a de nombreux aspects de la modélisation du
système et le contrôleur. Une des considérations la plus
fondamentale est la décision de modéliser en temps discret ou en
temps continu. Temps continu facilite certains types de modélisation,
particulièrement les modèles fluides. Cependant, le temps discret
est conforme à la façon dont les mesures sont obtenues à
partir des systèmes informatiques [47].
c) Notre cas :
Nous pouvons considérer que le système
rétroactif est un noeud capteur ou un cluster de noeuds, et
l'entrée de ce système est l'état de ses voisins que
ça soit en énergie (niveaux de batteries) ou bien leurs
états à savoir en veille ou actif, en se basant aussi sur les
paramètres du systèmes qu'on peut considérer le temps
(rounds), le niveau des batteries du noeud lui-même ou du cluster, le
dégrée de la redondance de sa zone de surveillance, et son
état antérieur actif ou passif pour la suite décider en
temps réel de se mettre en veille ou de se réveiller donc de
rester dans le même état antérieur ou de basculer vers un
état différent. Et cela en se basant pas cette théorie de
control rétroactif.
A ce jour, il n'y pas eu d'approche utilisant cette solution
pour exactement ce problème d'ordonnancement et de redondance dans les
RCSF néanmoins il existe des travaux utilisant cette théorie pour
des problèmes similaire comme l'agrégation de données en
temps réel dans les RCSF ou surtout ceux de Marcel Steine et al
« A Distributed Feedback Control Mechanism forQuality-of-Service
Maintenance inWireless Sensor Networks »
39
Conclusion générale
Depuis quelques années, les avancées
technologiques en termes de miniaturisation des capteurs sans fil, des
systèmes embarqués et des supports de communication ont rendu
envisageable le déploiement et l'exploitation de milliers ou millions de
capteurs, organisés en réseaux de capteurs, et ont
été identifiés comme l'une des dix technologies clefs de
l'avenir et ce en raison de l'incroyable potentiel applicatif qu'elle
renferme.
Cependant, parmi les applications les plus répondues
ces dernières années des réseaux de capteurs sans fil et
spécialement de type multimédia, les systèmes de
surveillance qu'on peut trouver dans une simple maison ou banque comme dans un
site critique comme le cas d'une station nucléaire ou frontières
d'une nation, pour cela les systèmes de surveillance ont connu un essor
incroyable depuis quelques années surtout avec l'émergence de
nouvelles technologie comme les nano-capteurs et les caméras sans fil
très sophistiquées dotées d'une résolution d'image
et de traitement importants.
Après avoir donné une présentation des
généralités sur les réseaux de capteurs sans fil et
un état de l'art sur les systèmes de surveillance, nous avons
présenté dans ce rapport les algorithmes d'ordonnancement
d'activité de mise en veille dynamique des noeuds capteurs qui utilise
surtout la redondance spatiale pour leur mécanisme d'ordonnancement. Les
techniques d'ordonnancement d'activité des noeuds capteurs comporte deux
étapes, à savoir la détection de la redondance qui
sous-entend la découverte de voisinage, et ensuite une prise de
décision sur une politique particulière sur l'alternation
d'états des capteurs entre actifs et passif (dormants ou en veille) tout
en gardant la couverture et la connectivité du réseau. Les
techniques ainsi présentées possèdent toutes le même
critère de redondance : un capteur est redondant si sa zone de
surveillance est couverte par la zone de surveillance de ses voisins.
Néanmoins, chacune de ces techniques s'appuie sur une règle, un
modèle et des hypothèses spécifiques pour la
détection de la redondance.
Toutefois, ces techniques possèdent certaines
exigences, en l'occurrence : la synchronisation en temps du réseau ainsi
que l'échange d'un grand nombre de messages de contrôle. En effet,
étant donné que les schémas d'ordonnancement
d'activités procèdent en rounds, les décisions
d'activités des noeuds doivent être synchronisées à
la fin du round afin qu'il n'y ait pas apparition de régions non
couvertes dans la zone d'intérêt. Cependant, supposer une
synchronisation en temps global dans un réseau de capteurs, qui est
généralement assez dense, est couteux en nombre de messages
échangés et assez difficile à réaliser. De plus,
les mécanismes de back-off aléatoire exigent l'échange
d'un nombre important de messages de contrôle, ce qui constitue une
dépense d'énergie supplémentaire.
Dans notre étude, nous avons remarqué que la
majorité des travaux utilisent une approche géométrique
pour la détection des capteurs redondants, que l'approche analytique
à qui se base sur des heuristiques, car elle se base sur des calculs
géométriques précis et garantit la détection d'une
redondance complète. Donc, les noeuds doivent coopérer dans leur
décision de redondance avec la contrainte de préserver la
couverture de surface complète de la zone d'intérêt surtout
dans notre cas d'une application de surveillance militaire qui nécessite
une garantie de couverture, donc nous allons opter sur une approche
géométrique.
Il est donc primordial d'ordonnancer l'activité des
capteurs et cela pendant qu'une partie des capteurs participe à
l'application, les autres sont mis en veille, et le critère de choix des
noeuds
40
actifs est celui de la couverture de surface, et des niveaux
de batteries des noeuds voisins à un saut ou à k-sauts, sachant
que l'ensemble des capteurs actifs doit être capable de surveiller la
zone d'intérêt aussi large que celle couverte par l'ensemble de
tous les capteurs déployés.
La redondance d'un capteur dépend de l'état de
ses voisins : un capteur peut ne plus être redondant si un de ses voisins
devient passif, s'il s'agit d'une solution d'ordonnancement d'activités.
Dans ce contexte, les protocoles d'ordonnancement d'activités proposent
des mécanismes d'attente aléatoire afin d'éviter les
décisions de désactivation simultanées.
Pour la suite de notre travail de magister, nous avons
l'idée de mettre en oeuvre une technique d'ordonnancement basée
sur le feedback control afin d'avoir une performance voulue pour
prolonger la durée de vie du réseau tout en préservant la
couverture en utilisant des modèles mathématiques utilisés
dans cette approche récente appliquée dernièrement sur des
systèmes informatiques alors qu'ils existaient déjà bien
avant dans le domaine d'automatisme et de l'électronique en
général.
41
Références bibliographies
01 B. Cãrbunar, A. Grama, J. Vitek, O. Cãrbunar,
«Redundancy and coverage detection in sensor networks», ACM
Transactions on Sensor Networks (TOSN), Volume 2, Issue 1, February 2006.
02 I.F. Akyildiz, W. Su, Y. Sankarasubramaniam, and E.
Cayirci, «Wireless Sensor Networks: A Survey,» Computer Networks
Journal (Elsevier), vol. 38, no. 4, pp. 393-422, March 2002.
03 M. LEHSAINI, «Diffusion et couverture basées
sur le clustering dans les réseaux de capteurs: application à la
domotique. » , thèse de doctorat en informatique, Université
A.B Tlemcen Faculté des Sciences pour l'Ingénieur &&
Université de Franche-Comté U.F.R Sciences et Techniques
École Doctorale SPIM, 2009.
04 http ://
www.bluetooth.com/French/,
dernière consultation en septembre 2013.
05 A. Makhoul, «Réseaux de capteurs :
localisation, couverture et fusion de données», Thèse pour
obtenir le grade de docteur de l'Université de Franche-Comté,
novembre 2008.
06 E. Fleury « réseaux de capteurs », 16
décembre 2004.
07 Chee-Yee Chong, Srikanta P. Kumar, «Sensor Networks:
Evolution, Opportunities, and Challenges», 2010.
08 M.J. Brown, «Users Guide Developed for the JBREWS
Project», Technical repport LA-UR-99-4676, Los Alamos National Laboratory
of California University, 1999.
09 R. Kazi Chandrima, «A Survey on Sensor Network»,
International Journal of Computer and Information Technology (IJCIT), Vol. 1,
July 2010.
10 F.Z. BENHAMIDA, "Tolérance aux pannes dans les
réseaux de capteurs sans fil", Mémoire de Magistère, Ecole
nationale Supérieure en Informatique (EZSI), Oued-Smar-Alger, 2009.
11 R. Kacimi, "Techniques de conservation d'énergie
pour les réseaux de capteurs sans fil", Thèse de doctorat en
informatique, Université de Toulouse, France, 2009.
12 I.F. Akyildiz, W. Su, Y. Sankarasubramaniam and E. Cayirci,
«Wireless sensor networks : a survey », IEEE Communications Magazine,
Vol. 40(8), pp. 102-114, August 2002.
13 D. Curiac, V. Constantin, P. Dan, J. Lucian and D. Alexa,
«Redundancy and Its Applications in Wireless Sensor Networks: A
Survey», WSEAS Transactions on Computers, Vol. 8, Issue 4, pp. 705-714,
April 2009.
14 K. Sha, J. Du, and W.S. Wayne, «WEAR: A Balanced,
Fault-Tolerant, Energy-Aware Routing Protocol for Wireless Sensor
Networks,» Int'l Journal of Sensor NETworks (IJSNET), Vol. 1(3), pp.
156-168, November 2006.
15 H. Alemdar and C. Ersoy, «Wireless Sensor Networks for
Healthcare: A Survey,» Computer Networks, Volume 54, Issue 15, pp.
2688-2710, October 2010.
16 K. Wu, Y.Gao, F. Li, and Y. Xiao, «Lightweight
deployment-aware scheduling for wireless sensor networks», ACM/Kluwer
Mobile Networks and applications, December 2005.
17 A. Gallais, "Ordonnancement d'activité dans les
réseaux de capteurs : l'exemple de la couverture de surface",
Thèse doctorat en Sciences mathématiques, Juin 2007.
18 L. Gu and J. A. Stankovic. Radio-triggered wake-up
capability for sensor networks, In Proc. of 10th IEEE Real-Time and Embedded
Technology and Applications Symposium (RTAS), pages 27-37, Toronto, Canada,
2004.
19 J. Deng, Y.S. Han, W.B. Heinzelman, and P.K. Varshney,
«Balanced-energy sleep scheduling scheme for high density cluster-based
sensor networks», Journal of Computer Communications, 28(14), 1631-1642,
2005.
42
20 J.J. Deng, Y.S. Han, W.B. Heinzelman, and P.K. Varshney,
«Scheduling sleeping nodes in highdensity cluster-based sensor
network», Journal of Mobile Networks and Applications, 10(6), 825835,
2005.
21 B. Singh and D.K. Lobiyal, «Traffic-Aware
Density-Based Sleep Schedulingand Energy Modeling for Two Dimensional Gaussian
Distributed Wireless Sensor Network», Published online in Springer
Science+Business Media, LLC. 201214, July 2012.
22 Y. Ding, C. Wang, and & L. Xiao, «A connectivity
based partition approach for node scheduling in sensor networks», In Proc.
of the 3rd IEEE international conference on distributed computing in sensor
systems, pp. 354-367, 2007.
23 X. Xu, Y.H Hu, W. Liu, and J. Bi, «Data-coverage sleep
scheduling wireless sensor networks», In Seventh international conference
on grid and cooperative computing, pp. 342- 348, 2008.
24 L.H Yen and Y.M Cheng, «Range-based sleep scheduling
(RBSS) for wireless sensor networks», Journal of Wireless Personal
Communications: An International Journal, 48(3), 411-423, 2009.
25 A. Schumacher, H. Haanpaa, «Distributed sleep
scheduling in wireless sensor networks via fractional domatic
partitioning», In Proc. of the 11th international symposium on
stabilization, safety, and security of distributed systems, pp. 640-654,
2009.
26 K.C Tung, C.H. Lu, and H.H Lin, «A distributed sleep
scheduling algorithm with range adjustment for wireless sensor networks»,
In Proc. of the second international conference on computational collective
intelligence: Technologies and applications, Part III, 2010.
27 G. Wang, G. Cao, T. L. Porta and W. Zhang «Sensor
Relocation in Mobile Sensor Networks», In Proc. of IEEE INFOCOM, 2005.
28 X. Li and N. Santoro, «ZONER: A ZONE-based Sensor
Relocation Protocol for Mobile Sensor Networks», In Proc. of the 31st IEEE
Conference on Local computer Networks (LCN), 2006.
29 X. Li, N. Santro and I. Stojmenovic, «Mesh-Based
Sensor Relocation for Coverage Maintenance in Mobile Sensor Networks», In
Proc. of the 4th International Conference on Ubiquitous Intelligence and
Computing (UIC), 2007.
30 K. Wu, Y. Gao, F. Li, and Y. Xiao, «Lightweight
deployment-aware scheduling for wireless sensor networks», ACM/Kluwer
Mobile Networks and applications, December 2005.
31 H. Bai, X. Chen and X. Guan, «Preserving coverage for
wireless sensor networks of nodes with various sensing ranges», In Proc.
of the 06th IEEE International Conference on Networking, Sensing and Control
(ICNSC), pp. 54-59, April 2006.
32 C. Huang, Y.C. Tseng and H.L. Wu, «Distributed
protocols for ensuring both coverage and connectivity of a wireless sensor
network», ACM Transactions on Sensor network (ToSN), Vol.3, March 2007.
33 E. Bulut, Z. Wang et K. Szymanski, «The Effect of
Neighbor Graph Connectivity on Coverage Redundancy in Wireless Sensor
Networks». In Proc. Of International Conference on Communications (ICC),
pp.1-5, South Africa, May 23-27, 2010.
34 M. Lehsaini, «Diffusion et couverture basées
sur le clustering dans les réseaux de capteurs : application à la
domotique», Thèse pour obtenir le grade de docteur,
Université de Franche-Comté, 2009.
35 B. Wang, "Coverage Control in Sensor Networks", Springer
Edition, ISBN 978-1-84996058-8, February 2010.
43
36 N. Ahmed, S.S Kanhere and S. Jha, «Probabilistic
Coverage in Wireless Sensor Networks», In Proc. of IEEE Conference on
Local Computer Networks (LCN), pp. 672-681, Sydney, Australia, November
2005.
37 H. Jaleel and M. Egerstedt, «Sleep Scheduling of
Wireless Sensor Networks Using Hard-core Point Processes», American
Control Conference (ACC) Washington, DC, USA, June 2013.
38 M. Hefeead and M. Bagheri, «Randomized K-coverage
algorithms for dense sensor networks», In Proc. of IEEE Info-com, pages
2376-2380, 2007.
39 Y. Li and S. Gao, «Designing K-coverage schedules in
wireless sensor networks», Journal of Combinatorial Optimization, 127-146,
2008.
40 D. Tian and N.D. Georganas, «A Coverage-Preserving
Node Scheduling Scheme for Large Wireless Sensor Network», In Proc. of the
1st ACM International Workshop on Wireless Sensor Networks and
Applications (WSNA'02), Atlanta, Geogia, USA, September, 2002.
41 A. Boukerche, X. Fei and R.B. Araujo, «An optimal
coverage-preserving scheme for wireless sensor networks based on local
information exchange», Journal of Computer Communications (Elsevier), pp.
2708-2720, October 2007.
42 M. Wueng and S. Hwang, «AKCE: An Efficient and
Accurate K-coverage Eligibility Algorithm in Wireless Sensor Networks». In
Proc. Of the IEEE International Symposium on Modeling, Analysis and Simulation
of computers and Telecommunication System (MASCTOS), pp. 1-8, Baltimore,
September 8-10, 2008.
43 B. Cãrbunar, A. Grama, J. Vitek, O. Cãrbunar,
«Redundancy and coverage detection in sensor networks», ACM
Transactions on Sensor Networks (TOSN), Volume 2, Issue 1, February 2006.
44
http://www.technologuepro.com,
"cours vidéo surveillance", consulté en septembre 2013.
45 C. Duran-Faundez, "Transmission d'images sur les
réseaux de capteurs sans fil sous la contrainte de l'énergie",
Thèse Doctorat de l'Université Henri Poincaré, Nancy1,
Traitement du Signal et Génie Informatique, 2009.
46 Tarek Abdelzaher, Yixin Diao, Joseph L. Hellerstein, Chenyang
Lu, and Xiaoyun Zhu
«Introduction to Control Theory And Its Application to
Computing Systems»
47 Joseph L. Hellerstein, Yixin Diao , Sujay Parekh, Dawn M.
Tilbury «Feedback Control of Computing Systems»
| 

