|
|
République Algérienne
Démocratique et Populaire
Ministère
de l'Enseignement Supérieur et de la Recherche
Scientifique
Université Abderrahmane Mira de
Bejaia
Faculté de Technologie
Département de Génie Electrique
MEMOIRE DE MASTER
En vue de l'obtention du diplôme de
Master en
Electrotechnique
Option : Automatisme Industriel
Thème
|
|
Stratégies de Commande d'un Véhicule
Hybride
|
|
Réalisé
par : Encadré par :
· Mr AOUZELLAG Haroune
· Mr GHEDAMSI Kaci
Année
Universitaire : 2012/2013
|
|
|
REMERCIMENTS
Après avoir rendu grâce à
dieu, je ne saurais au terme de ce travail
d'adresser ma profonde gratitude
à tous ceux
qui ont eu la bonté et la patience de satisfaire
ma curiosité et qui ont apporté leurs
contribution à
l'aboutissement de ce présent travail.
Je tiens à remercier
particulièrement :
· M
r
|
K. GHEDAMSI (Promoteur).
|
Pour son bon encadrement, sa disponibilité,
ses conseils fructueux qu'ils m'ont cessé de me prodiguer et ses
remarques pertinentes pour la pérennité de cet
écrit.
Je tiens aussi à remercier profondément
tous les enseignants du département de génie électriques
qui m'ont donné de leurs savoir et m'ont soutenu tout au long de mon
parcours universitaire.
Que les membres du Jury trouvent aussi mes hautes
considérations pour avoir accepté d'évaluer mon travail
dont leurs jugements me seraient certainement d'un grand
profit.

Avec ma profonde gratit
A l'homme qui a
été mon
a veillé tout au long
de
protéger, le plus fab uleux
vie à
m
encourager, à me
donner
'
l'
ma
ude et grand amour
; je dédie ce modeste travail :
ombre durant toutes m es
années d' études
et qui
aide et à
me
et le plus merveilleux des pères, pour toi
mon
père.
A celle qui m'a donné la vie, le symbole de
la tendresse, elle qui s'est sacrifiée pour mon bonheur
et ma réussite, à la merveilleuse femme et
la
A mes grands - mères et
mes grands - pères.
A mes oncles et mes tantes.
A mes cousins et mes
cousines. A mes amis (es) sans exception.
A toute
A tous ceux que j'aime.
A
douce m ère que j'ai.
les
Que dieu
gardes et les protèges.
A mes adorables frères, ainsi
ma chère soeur.
la promotion de Génie
Electrique.
tous ceux qui m'aiment.
Haroune.
TABLES DES MATIERES
LISTE DES SYMBOLES ET ABRIVIATIONS I
LISTE DES FIGURES IV
LISTE DES TABLEAUX VI
Introduction générale 01
Chapitre I : Etat de l'Art des Véhicules Hybrides
Existants
I. Introduction 03
II. Historique 03
III. Fonctionnement du véhicule hybride
05
III.1. Définition 05
III.2. Phases de fonctionnement d'un VH : 06
III.3. Classification des véhicules hybrides 07
III.3.1. Selon le taux d'hybridation 07
III.3.2. Selon l'architecture de véhicule hybride 10
III.4. Comparaison des différentes structures de
propulsion 12
IV. Conclusion 13
Chapitre II: Représentation
Macroscopique d'un Véhicule Hybride Série
I. Introduction 15
II. Description du modèle série
15
II.1. Sous système de traction 16
a) Machine électrique 16
b) Convertisseurs DC/AC (Onduleur) 17
c) Boîte de vitesses 17
d) Différentiel 18
II.2. Stockeur d'énergie 18
a) Batterie 18
b) Convertisseur associé (Hacheur) 21
II.3. Groupe électrogène 22
a) Moteur thermique 22
b) Génératrice 23
II.4. Bus continu (noeud du couplage énergétique)
24
III. Conclusion 24
Chapitre III: Modélisation d'un Véhicule
Hybride Série
I. Introduction 26
II. Modèle mécanique du véhicule
26
III. Modélisation des éléments
internes du véhicule 28
III.1. Groupe électrogène 28
III.2. Modélisation du MSAP 28
III.3. Modélisation de la batterie 30
III.4 . Modélisation de l'onduleur de tension 31
III.5. Modélisation du Hacheur 33
IV. Conclusion 34
Chapitre IV: Techniques de Commande d'un Véhicule
Hybride Série
I. Introduction 35
II. Stratégies de commande basées sur une
minimisation instantanée 35
II.1. Commandes de l'ensemble Convertisseur / Machine
électrique 35
II.1.1. Commande MLI 36
II.1.2. Commande vectorielle pour un asservissement de vitesse
38
II.2. Commandes de l'ensemble Convertisseur / Batterie 43
II.3.1. Régulation par boucle de courant (CMC) 43
II.3. Stratégie de commandes de l'ensemble Convertisseur
/Groupe Electrogène 43
II.4.1. Commande du redresseur par la méthode MLI à
bande d'hystérésis (HBCC) 43
II.4.2. Configuration des circuits de contrôle 44
II.5. Application de la technique intelligente sur la commande de
la MSAP 46
II.5.1. La commande Vectorielle avec régulateur PI flou de
vitesse 46
III. Système de gestion d'énergie du
modèle du véhicule 50
III.1. Présentation 50
III.2. Tehcnique de contrôle avec State-flow 51
IV.. Résultats de simulation et validation des
commandes 53
IV.1. Introduction 53
IV.2. Schémas globale réalisé 53
IV.3. Validation des stratégies de commande
55
IV.3.1. Validation des commandes liées à la machine de
traction et au système de stockage
d'énergie 55
IV.3.2. Validation de la commande de groupe
électrogène 59
IV.3.3. Validation du modèle globale du véhicule
série réalisé durant un cycle 61
IV.4. Bilan de puissance 64
V. Conclusion 66
Conclusion générale 67
REFERENCES ANNEXES
I
Liste des symboles
E~ Energie impulsionnelle [J] ;
E~ Energie transitoire [J] ;
E Energie permanente [J] ;
E Energie à fournir par les deux moteurs [J]
;
TH Taux d'hybridation ;
Cmth Couple du moteur thermique [N. m] ;
Fext Force extérieur au véhicule [N]
;
Fair Force équivalente à la
résistance de l'air [N];
F~ Composante de la force de traction [N]
;
Fr Résistance des roues sur le sol
[N] ;
v Vitesse du véhicule [m/s] ;
M Masse du véhicule [kg] ;
Pair Masse volumique de l'air;
S Surface frontale du véhicule
[m2] ;
C Coefficient de pénétration dans l'air
;
Cr Coefficient de roulement ;
[N] ;
r Réaction du sol sur les roues
P Poids du véhicule [N] ;
ar Angle formé par la route et
l'horizontale [degré] ;
!~ Puissance mécanique nécessaire à
l'avancement du véhicule [Watt] ;
[vs] Tension des enroulements statoriques de
la machine de traction [V];
[is] Courants dans les enroulements
statoriques de la machine de traction [A];
[ a]
Résistances statoriques [.12] ;
[L**] Inductances statoriques [H] ;
[ Çs] Composantes du flux statorique
dans le repère triphasé (abc) [Wb];
2 0345 Composantes du flux statorique dans le
repère triphasé (dq) [Wb] ;
2065 Composantes du flux d'entre fer de la MSAP
[Wb];
II
9 Position électrique du rotor par rapport au
stator [rad] ;
[P(9)] Matrice de Park ;
id, i Courants statoriques de la machin de traction dans
le repère tournant (d-q) [A] ;
vd, va Composantes des tensions rotoriques
dans le repère tournant (d-q) [V] ;
Let, La Inductances directe et quadratique de
la MSAP [H] ;
Ce Couple électromagnétique de
la MSAP [N. m] ;
12 Pulsation des grandeurs rotorique [radis]
;
coe Pulsation des grandeurs
électriques [radis];
f Coefficient de frottement ;
J Moment d'inertie [kg. m2] ;
P Nombre de paires de pôles ;
Cr Couple résistant [N. m]
;
Eb Tension à vide de la batterie [V]
;
R Résistance interne de la batterie [12]
;
b
lb Courant de la batterie [A] ;
Ub Tension à la sortie de la batterie [V]
;
Yb Rendement de la batterie ;
K Constante de polarisation [Ah-1] où
résistance de polarisation [12] ;
i* Courant dynamique en basse fréquence [A]
;
i Courant de batterie [A] ;
it Capacité extraite [Ah];
Q Capacité maximum de batterie [Ah];
A Tension exponentielle [V] ;
B Capacité exponentielle [Ah]-1 ;
ic Courant qui traverse la capacité du
bus continu [A] ;
VL Tension au borne de l`inductance du
hacheur [V] ;
iga, igb , igc Courants statoriques de la
génératrice [A] ; vga, vgb , vgc Tensions
statoriques de la génératrice [V].
III
Liste des Abréviations
MSAP Moteur synchrone à aimants permanents ;
MCI Moteur à combustion interne ;
VEH Véhicule électrique hybride ;
PHEV Véhicule électrique hybride particulier
(Particular hybrid Electric Vehicle) ;
AC Courant alternatif (Alternative Current) ;
DC Courant continu (Direct Current) ;
F.E.M. Force Électro-Motrice ;
PI Proportionnel Intégral ;
GES Gaz à effet de serre ;
VE Véhicule électrique ;
SOC Etat de charge (State Of Charge).
IV
LISTE DES FIGURES
Figure I.1 : La puissance de la charge en
deux composantes : moyenne et dynamique 08
Figure I.2 : Architecture série du
véhicule hybride 10
Figure I.3 : Architecture parallèle du
véhicule hybride double et simple arbre 10
Figure I.4 : Schéma véhicule
à double hybridation 11
Figure II.1 : Schéma
détaillé d'un véhicule hybride série
15
Figure II.2 : Schéma
détaillé d'un onduleur 16
Figure II.3 : Différentiel
17
Figure II.4 : Vue interne d'une batterie
18
Figure II.5 : Courbe de décharge d'une
batterie Li-Ion pour différentes charges en Ah 18
Figure II.6 : L'énergie massique en
fonction de la puissance massique pour différents types
d'accumulateurs 19
Figure II.7 : Schéma
détaillé d'un convertisseur DC/DC 20
Figure II.8 : Moteur thermique Diesel
à quatre temps 21
Figure II.9 : Carthographie d'un moteur
Diesel Renauld K9K 22
Figure III.1 : Bilan des forces sur le
véhicule 26
Figure III.2 : Schéma d'une machine
synchrone à amants permanents 28
Figure III.3 : Modèle
équivalent électrique de la batterie 29
Figure III.4 : Schéma
équivalent de l'onduleur 30
Figure III.5 : Hacheur
élévateur-abaisseur bidirectionnel 31
Figure IV.1 : Principe de la technique MLI
Intersective (sinus-triangle) 35
Figure IV.2 : Schéma bloc d'une
commande MLI 36
Figure IV.3 : Principe de la commande
vectorielle 37
Figure IV.4 : Schéma global de la
commande vectorielle en vitesse 38
Figure IV.5 : Schéma bloc de
découplage 39
Figure IV.6 : Boucle de régulation de
la vitesse 40
Figure IV.7 : Boucle de régulation du
courant Id 41
Figure IV.8 : Schéma de principe de la
commande par boucle de courant 42
Figure IV.9 : Schéma de principe de la
commande par Hystérésis 42
Figure IV.10 : Schéma de
contrôle du convertisseur MLI 44
Figure IV.11 : Modèle en boucle
fermé de la boucle de tension du bus continu 45
Figure IV.12 : Schéma principe d'un
contrôleur flou de type PI 46
Figure IV.13 : Structure interne d'un
régulateur flou 46
Figure IV.14 : Fonction d'appartenance des
variables d'entrées et sortie 46
Figure IV.15 : Surface de la fonction
d'appartenance I = fuzzy(E, LIE) 48
V
Figure IV.16 : Diagramme de contrôle
d'énergie 51
Figure IV.17 : Circuit de puissance
réalisé avec logiciel Psim 53
Figure IV.18 : Circuit de commande
réalisé avec logiciel Matlab/Simulink 54
Figure IV.19 : Référence de
vitesse imposée à la machine de traction 55
Figure IV.20 : Vitesse mesurée du
moteur électrique avec PI comme régulateur
55
Figure IV.21 : Courant 1d de la motorisation
électrique de traction 56
Figure IV.22 : Courant 1q de la
motorisation électrique de traction 56
Figure IV.23 : Couple Ce de la
motorisation électrique de traction 56
Figure IV.24 : Tension à la sortie de
la batterie 57
Figure IV.25 : Tension du bus continu
57
Figure IV.26 : Courants statoriques de la
machine électrique de traction 57
Figure IV.27 : Zoom sur les courants
statoriques de la machine de traction 58
Figure IV.28 : Tensions statoriques de la
machine de traction 58
Figure IV.29 : Zoom sur l'allure des tensions
statorique de la machine de traction 58
Figure IV.30 : Vitesse de la machine de
traction avec régulateur PI flou 59
Figure IV.31 : Référence
généré et vitesse de la génératrice
59
Figure IV.32 : Courant fournis par la
génératrice au bus continu 60
Figure IV.33 : Courant fournit par la
batterie 60
Figure IV.34 : Tension de bus continu durant
le test 61
Figure IV.35 : Cycle de conduite
proposé et la poursuite de la machine de traction 61
Figure IV.36 : Le couple
développé par la machine de traction durant le cycle
62
Figure IV.37 : Vitesse de la
génératrice et sa référence imposée par la
commande 62
Figure IV.38 : Courant transcrit dans la
batterie durant de cycle 62
Figure IV.39 : Tension sur les bornes de la
batterie durant le cycle 63
Figure IV.40 : Evolution de SOC durant le
cycle 63
Figure IV.41 : Tension sur le bus continu
durant le cycle 63
Figure IV.42 : Puissance en entrée et
en sortie du moteur électrique de traction 64
Figure IV.43 : Puissance
délivrée par la génératrice 64
Figure IV.44 : Bilan de puissance lors de
recharge/décharge de la batterie 65
VI
VI
LISTE DES TABLEAUX
Tableau I.1 : Dénomination usuelle des
véhicules hybrides et fonctionnalité associées
09
Tableau I.2 : Comparaison de diverses
architectures 12
Tableau II.1 : Caractéristique des
différentes batteries pour une application VII 20
Tableau IV.1 : Table d'inférence
47
Page 1
Introduction générale
Dans le contexte énergétique actuel
(pénurie et pollution des énergies fossiles), le désir
humain ne cesse d'améliorer sa qualité de vie en introduisant de
milliers de nouvelles technologies dont l'automobile occupe l'univers quotidien
d'aujourd'hui. En effet, les pollutions sonores et par gaz à effet de
serre ainsi qu'une consommation de carburant en constante augmentation,
impliquant de plus cet objet de consommation au coeur des débats autour
de l'énergie. Plusieurs solutions préconisées par les
constructeurs automobiles et organismes de recherche, pour remplacer peu
à peu les véhicules classiques notamment dans les centres villes.
Le devenir de l'automobile dans les prochaines années est donc un sujet
de recherche d'actualité. Ces dernières années, ce sont la
recherche d'une meilleure qualité de vie, les contraintes
environnementales et économiques ainsi que l'économie de
l'énergie qui constituent les facteurs essentiels de
l'intérêt que suscite le développement dans
l'énergie électrique. La réussite dans ce domaine
proviendra d'un subtil mélange entre une vision scientifique de haut
niveau et une maitrise de la technologie. Dans cette combinatoire,
l'électricité jouera un rôle fondamental et continuera
à atteindre les nouveaux objectifs de l'automobile en termes
d'économie d'énergie et d'environnement. [HUSA03]
Le véhicule tout électrique semble à
priori ne pas être une solution fiable à court et moyen terme de
part sa faible autonomie et son temps important de recharge. [HOEL03]
[KELLY06]
Le véhicule hybride est une solution
intermédiaire très prometteuse. L'intérêt de ce
véhicule est sa capacité de combiner les deux sources
d'énergie (thermique et électrique) et bénéficier
ainsi des avantages du véhicule conventionnel et du véhicule
électrique.
Les véhicules hybrides, s'ils sont très
intéressants, nécessitent aussi d'avoir un contrôle
adapté, par rapport aux objectifs à atteindre, et par rapport
à leur architecture. Le contrôle d'un véhicule hybride est
en effet assez différent de celui d'un véhicule traditionnel,
dans le sens où, celui-ci disposant de deux sources d'énergie, un
contrôleur "haut-niveau" doit déterminer quelle est la puissance
que doit fournir chacun des moteurs. Le contrôle d'un véhicule
hybride doit donc être adapté à son architecture et
à ses fonctionnalités (possibilité de
récupérer de l'énergie au freinage, de couper le moteur
thermique tout en utilisant le moteur électrique pour la traction,
etc.). [EHSA05] [LHOM07]
Page 2
Introduction générale
Un premier chapitre fera un état de l'art sur les
véhicules hybrides ainsi que leurs classifications selon l'architecture
et le taux d'hybridations, un choix sur l'architecture sera justifier par une
comparaison entre les différentes structures selon plusieurs
critères.
Le deuxième chapitre présentera les divers organes
constituant une chaine de traction hybride, chaque organe doit rependre au
besoin de l'architecture choisis.
Le troisième chapitre traitera la modélisation de
ses différents organes électriques, la partie mécanique
n'est pas l'objectif de ce travail.
Le quatrième chapitre est l'oeuvre d'art de ce travail, on
l'a réservé pour les différentes techniques employer dans
ce projet de simulation à fin de réalisé un modèle
qui satisfera chacune des raisons de l'existence d'un hybride. Des
résultats de simulations seront apportés.
Page 3
Chapitre I :
Etat de l'Art des Véhicules Hybrides
Existants
I. Introduction
Les particules et les gaz à effet de serre ont
toujours été un handicap écologique pour le
véhicule conventionnel (moteur à combustion interne), une
solution première été adopté, les véhicule
électrique où l'autonomie reste généralement
trés faible. Parce que, la seule source d'énergie est
stockée dans une batterie, hors que celle-ci prend un temps
énorme pour être rechargée, d'où l'idée de
passer à l'hybridation en introduisant une motorisation
électrique en plus de la motorisation thermique. L'objectif étant
de combiner les avantages du véhicule électrique (zéro
pollution et récupération d'énergie), l'autonomie de la
batterie et les prestations du véhicule thermique.
L'objectif de ce premier chapitre est de
présenter l'état de l'art des véhicules hybrides,
notamment du côté de leurs architectures et leurs taux
d'hybridation, en commençant avec un bref historique sur cette
technologie qui tôt où tard révolutionnera le
monde.
II. Historique
Toute a commencé avec le véhicule
électrique en Europe au début du 19ème
siècle, après l'invention de la batterie primaire par Volta en
1800 et la démonstration du principe du moteur électrique en 1821
par Faraday. La première voiture électrique a été
construit en 1834 à Brandon; en grand Bretagne par un génie
mécanicien nommé Thomas Davenport, le petit véhicule
fonctionnait avec une batterie non rechargeable et réussissait à
parcourir un court trajet sur rail. Puis en 1859, le français G.
Planté, inventait la batterie secondaire plomb/acide rechargeable. En
1869, Gramme construit le premier moteur électrique à courant
continu ayant une puissance de plus d'un cheval. Douze ans plus tard, T.
Gustave réalisait le premier véhicule électrique
alimenté par une batterie secondaire [EHSA05]; le véhicule
était propulsé par un moteur électrique à courant
continu ; en 1885, les allemands Daimler et Benz inventait la première
voiture à essence. Le début du 20ème
siècle a constitué l'âge d'or du VE, en effet c'est un VE
qui pour la première fois a franchi la limite de 100km/h. En 1899, avec
le Belge Camille Jenatzy à bord de sa voiture baptisée (La Jamais
Contente), ce VE avait deux moteurs entrainant les roues arrière, d'une
puissance maximale totale de 50kW (soit 67 chevaux),
Page 4
Chapitre I : Etat de l'Art des Véhicules Hybrides
Existants
alimentés par les 80 éléments de
la batterie Fulmen pesant prés de la moitié du poids total du
véhicule de 1,5 tonne.
Cependant, l'amélioration continue des
performances des véhicules à moteur à combustion interne,
l'apparition de l'essence bon marché et la persistance des limites qui
affectent la capacité des batteries font disparaitre progressivement les
VE du marché; ainsi au début des années 30, la production
de VE est presque complètement interrompu, la période 1921-1960
étant dominé par les véhicules à moteur thermique.
Dés lors les VE n'ont connu que des utilisations spécifiques.
[WAK98]
Après l'invention du transistor et thyristor en
1945, ces découvertes conduisent au développement de commande des
moteurs à courant alternatif à fréquence variable. En
même temps des chocs pétroliers des années 1970-1980, de
nombreux pays commencent à s'intéresser aux VE, les recherches
sont reprises et le VE commence à réapparaitre en petit nombre.
En 1980-1990, quelques véhicules réaliser comme la Peugeot 106
électrique mais leur autonomie et performance reste
insuffisantes.
La question du stockage de l'électricité
a mobilisé les scientifiques depuis déjà deux
siècles et reste encore l'une des clés de l'évolution du
système énergétiques en général et du VE en
particulier. L'autonomie des VE reste généralement faible. En
outre, la recharge des batteries est lente et doit être
généralement effectuée la nuit, ces contraintes
d'utilisation ont bloqué le marché du véhicule
électrique, des batteries plus performantes et plus
légères arrivent sur le marché depuis ces dernières
années, mais elles sont coûteuses et les progrès modestes.
[FUHS09]
Pour palier au problème d'autonomie, d'autres
solutions ont été investiguées. Ainsi, les constructeurs
se sont orientés vers les véhicules hybrides (VH). Leur but est
de diminuer la consommation et la pollution, des véhicules
conventionnels où inversement d'augmenter l'autonomie du VE. Le
véhicule hybride le plus connu est la Prius de Toyota
commercialisée en première lieu au Japon. Aujourd'hui de plus en
plus de voitures hybrides apparaissent,
comme la Ford Espace Hybrid, la lexus etc.
III. Fonctionnement du véhicule hybride
III. 1. Définition
Un véhicule hybride est un véhicule qui
utilise au moins deux sources d'énergie différentes pour la
traction du véhicule, dans l'une doit être réversible.
Généralement, on désigne par
Page 5
Chapitre I : Etat de l'Art des Véhicules Hybrides
Existants
voiture hybride une voiture qui recourt à un
carburant et à l'électricité pour se mouvoir au moyen de
deux moteurs, l'un thermique, l'autre électrique. D'un certain point de
vue, les voitures à hydrogène peuvent être
considérées comme des véhicules hybrides. Elles utilisent
en effet le dihydrogène de leur pile à combustible comme source
d'énergie chimique pour alimenter une batterie et un moteur
électrique. [EHSA05]
L'hybridation actuelle vise à l'optimisation
globale du véhicule particulièrement en milieu urbain. Cette
optimisation est au niveau énergétique et des émissions de
gaz à effet de serre (GES). Elle vise aussi à
améliorée le coté performance (vitesse, couple, gestion
d'énergie...), sans aucune contrainte d'autonomie. Les moteurs
thermiques, trop critiqué pour leurs émissions de CO2, peuvent
fournir un large panel de puissance : la faible (vitesse réduite)
jusqu'à la plus forte (dépassement, démarrage en
côte), mais cela ce fait avec un rendement très faible et une
importante émission du GES. Il est préférable d'utiliser
ce dernier dans sa gamme de fonctionnement optimal et de faire recours au
moteur électrique qui a un rendement élevé et un couple
important.
III.2. Phases de fonctionnement d'un VH
2.1 Phase arrêt
Le moteur thermique peut être automatiquement
coupé, ce qui permet de réduire la consommation en cycle urbain,
c'est la solution la plus simple connu sous le nom
d'alterno-démarreur, le démarrage est assuré par
le moteur électrique. Cette fonctionnalité est destinée
à être utilisée lors d'arrêt aux feux rouges,
où dans des embouteillages.
2.2 Phase de départ où à faible
vitesse
Les roues sont propulsées par le moteur
électrique seul, alimenté par la batterie à
fréquence variable. [HUSA03]
Dans le cas où la batterie est
déchargée, le moteur thermique prendra la relève en
fournissant un couple supérieur au couple de consigne (demandé
par le conducteur), pour entrainer le véhicule et une
génératrice afin de recharger la batterie.
Cette fonctionnalité vise à ce que la
voiture soit propulsée par le moteur électrique dans la zone
urbaine. Comme elle permet d'augmenter légèrement la charge du
moteur thermique en lui permettant de fonctionner dans la plage de son meilleur
rendement. Le supplément d'énergie est ensuite
récupéré par la machine électrique pour recharger
la batterie.
Page 6
Chapitre I : Etat de l'Art des Véhicules Hybrides
Existants
2.3 Phase de condition normale
Les roues sont propulsées à la fois par le
moteur thermique et le moteur électrique, ce dernier
est alimenté par une batterie. Un
générateur assure la recharge de cette batterie, on parle ici de
l'alternateur accouplé au moteur thermique qui constitue ensemble un
groupe électrogène.
Ce mode peut être actionné pour charger
le moteur thermique afin de le placer sur un point de fonctionnement de
meilleure efficacité.
Cette fonction n'existe que dans les véhicules
hybrides où les deux couples peuvent s'additionner (architecture hybride
parallèle et série/parallèle).
2.4 Cas de forte accélération
Les deux moteurs rentrent en jeux, le moteur
électrique est alimenté par la batterie. Pas de
générateur en fonctionnement, afin de
céder toute la puissance du moteur thermique pour la
propulsion.
2.5 Phase de freinage
L'énergie cinétique du véhicule peut
être partiellement récupérée par le moteur
électrique et
stockée dans la batterie.
Si le système de stockage a atteint sa limite
de charge maximale, le frein mécanique prend le relais pour continuer de
décélérer le véhicule jusqu'à l'arrêt
et l'énergie cinétique sera dissipée sous forme de chaleur
dans les freins comme c'est le cas dans les véhicules
conventionnels.
III.3. Classification des véhicules hybrides
3.1 Selon le taux d'hybridation
Cette classification est surtout utilisée par les
constructeurs et équipementiers. Elle ne prend
pas en compte l'architecture du véhicule mais
plutôt les fonctionnalités qu'elle peut réaliser en
fonction de son taux d'hybridation. Cette classification se distingue par
quatre niveaux : le micro hybrid, le mild hybrid, le full
hybrid et le plug-in hybrid.
On appelle taux d'hybridation la part de puissance que
peut fournir la seconde source d'énergie par rapport à la
puissance totale disponible à bord. Pour un véhicule hybride
thermique/électrique, le taux d'hybridation (I.1) est égal au
rapport de la puissance électrique sur la puissance totale
exprimé en pourcentage :
Puissance é~ectrique
TH = X 100 (I.1)
Puissance électrique+Puissance
thérmique
Page 7
Chapitre I : Etat de l'Art des Véhicules Hybrides
Existants
En allant d'un véhicule thermique (TH=0%),
jusqu'au véhicule électrique (TH=100%) plusieurs
nominations peuvent exister, notons que ces nominations sont très
variables selon les auteurs et les constructeurs automobiles.
a) Micro Hybrid
La caractéristique principale du micro hybride
est que l'ancien alternateur et démarreur du
véhicule forment un seul moteur
électrique appelé alterno-démarreur, capable de
remplir les deux fonctions, celles de démarrer le moteur thermique et de
charger la batterie. Cette configuration permet également de remplir la
fonction Stop&Go représentant le premier niveau
d'hybridation. Ainsi, les véhicules qui le sont équipés se
mettent en veille dès que la vitesse tombe au-dessus de 6 km/h, i.e.
à l'approche d'un feu rouge où dans un embouteillage. Au
démarrage, le moteur repart automatiquement dès que le conducteur
relâche la pédale de frein. [GUEN11]
b) Mild Hybrid
La principale différence entre le micro
hybrid et le mild est l'alterno-démarreur,
remplacé par
un moteur électrique plus puissant capable
d'accomplir de nouvelles taches ainsi la batterie étant de taille plus
grande, le moteur électrique assiste le moteur thermique dans la
traction, mais entraine très rarement le véhicule tout seul. Une
autre fonctionnalité importante de l'hybride mild est la
possibilité de récupérer l'énergie cinétique
du véhicule lors du freinage. Le moteur électrique est d'habitude
branché sur le même arbre que le moteur thermique, entre le moteur
thermique et la boite de vitesse. Cette configuration permet un gain de
consommation entre 20 % et 25 % par rapport à une voiture classique de
même catégorie.
c) Full Hybrid
Le full Hybrid est équipé d'un
moteur thermique et d'un moteur électrique d'une puissance
relativement équivalente. Ainsi, par rapport
à la configuration mild le moteur électrique augmente en
importance, le moteur thermique pouvant être diminué de taille. La
batterie devient aussi plus grande et permet grâce au moteur
électrique d'entrainer le véhicule en fonctionnement tout
électrique (zéro émission). Ce mode de fonctionnement peut
être sous le contrôle de la gestion électronique du
véhicule où sous le contrôle direct du conducteur. Dans le
premier cas, le fonctionnement tout électrique couvre des distances
courtes aux vitesses faibles (Toyota Prius, Nissan Tino Hybrid)
laissant la priorité à l'essence sur route où quand la
circulation est fluide. Donc le deuxième cas, le conducteur peut choisir
un mode tout électrique pour des distances plus longues (20 Km où
plus), en général compatibles avec
Page 8
Chapitre I : Etat de l'Art des Véhicules Hybrides
Existants
l'usage urbain. Le contrôle de tel
système est complexe, mais l'amélioration du rendement global
entraine une diminution de consommation de 40 % à 45 %.
[EHSA05]
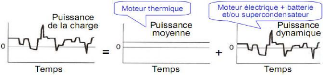
Figure I.1 : Puissance de charge en deux composantes :
moyenne et dynamique
La variété des modes de fonctionnement
d'un véhicule full Hybrid, procure une importante
flexibilité dans la gestion énergétique. La figure I.1
présente une gestion d'énergie sur un VH où la puissance
instantanée est décomposée en puissance moyenne et
dynamique. Cette décomposition s'accorde avec la théorie des
trois énergies (?E = E + E + E1), qui
divise
la fourniture d'énergie en trois
catégories : l'énergie permanente E ,
transitoire E et impulsionnelle E1. Il est donc
avantageux d'optimiser la liaison source et consommation afin
d'améliorer l'efficacité énergétique du
système entier. Dans ce sens, la puissance totale de la charge est
fournie par deux types de sources différentes. Ainsi, l'énergie
thermique provenant d'un moteur thermique est bien adaptée pour fournir
l'énergie permanente, tandis que l'énergie électrique est
bien adaptée pour fournir la puissance dynamique à travers le
moteur électrique alimenté par la batterie.
d) Plug In Hybride
Un plug-in de véhicules électriques
hybrides (PHEV), est un véhicule hybride avec des piles rechargeables
qui peuvent être restaurés à pleine charge en branchant une
fiche à une source externe d'énergie électrique. PHEV
partage à la fois les caractéristiques d'un véhicule
électrique hybride classique, ayant un moteur électrique et un
moteur thermique et celles d'un véhicule tous électrique, tous
ayant également une prise pour se connecter au réseau
électrique. La plupart des véhicules électriques hybrides
rechargeables sur les routes aujourd'hui sont les voitures
particulières, mais il y`a aussi des versions PHEV de véhicules
utilitaires et fourgonnettes, camions utilitaires, autobus, trains, motos,
scooters et véhicules militaires.
Certaines classifications proposent des
désignations où des fonctionnalités
supplémentaires. Par exemple [GUIL08], mentionne l'existence de
Muscle Hybrid, qui emploient l'assistance électrique dans le
seul but d'améliorer les performances du véhicule, sans
downsizing du
Page 9
Chapitre I : Etat de l'Art des Véhicules Hybrides
Existants
moteur thermique. Ce type de conception est assez
éloigné de l'usage premier des véhicules hybrides,
c'est-à-dire limiter les émissions de CO2.
Le tableau (I.1) résume toutes les
fonctionnalités déjà mentionnées selon le type
d'hybridation :
Tableau I.1 : Dénomination usuelle des
véhicules hybrides et fonctionnalité
associées
Micro Mild Full Plug-in
Hybrid Hybrid Hybrid Hybrid
|
Coupure du moteur à l'arrêt du véhicule
Récupération d'énergie au freinage
|
V' V' V' V'
(optionnelle) V' V' V'
|
Assistance électrique et V' V' V'
Downsizing
V' V'
Mode Tout-électrique
|
Autonomie en Mode Tout-électrique (ZEV)
|
V'
|
Recharge batterie via V'
Réseau Domestique
Exemple de réalisation Citroën C3 Honda IMA
Toyota THSII Daimler
Sprinter
3.2. Selon l'architecture du véhicule
hybride
Les VH peuvent être classés en trois
grandes architectures. L'architecture désigne la configuration des
principaux éléments de la chaîne de traction. Dans notre
cas, il s'agit du moteur thermique, machine électrique et d'une
batterie. On peut caractériser trois architectures par la façon
dont les énergies thermique et électrique sont acheminées
jusqu'aux roues : série, parallèle où à
dérivation de puissance (série-parallèle).
[CHAN01]
a) Hybride série
Dans cette configuration (figure I.2), le moteur
thermique entraine un alternateur qui alimente la batterie en cas de
décharge et le moteur électrique en cas de forte demande de
puissance. Ce type de modèle permet une très grande souplesse de
propulsion, elle consiste à faire fonctionner le moteur thermique dans
la plage de son rendement le plus élevé et à augmenter
l'autonomie du véhicule. Par contre le rendement global est très
faible à cause d'une double conversion d'énergie. Puis, elle
nécessite un moteur électrique relativement puissant car il
assure à lui seul l'intégralité de la
propulsion.
Page 10
Chapitre I : Etat de l'Art des Véhicules Hybrides
Existants
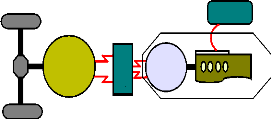
Réservoir
Groupe Electrogène
Génératrice
Moteur thermique
Moteur électrique
Batterie
Figure I.2 Architecture série du véhicule
hybride
Néanmoins cette architecture permet de satisfaire
l'une des contraintes soulevées dans la problématique,
particulièrement une faible émission en cycle urbain et un gain
de 15 à 30% en consommation. [GUEN11] [CHAN01]
b) Hybride parallèle
Dans une structure hybride parallèle, le moteur
thermique fournit sa puissance aux roues
comme pour un véhicule traditionnel. Il est
mécaniquement couplé à une machine électrique qui
permet de l'assister.
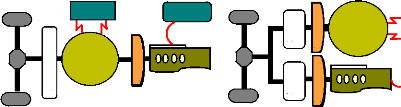
Boite de vitesse
Moteur électrique
Batterie
Embrayage
Moteur thermique
Réservoir
Boite de vitesse
Boite de vitesse
Embrayage
Embrayage
Moteur thermique
Moteur électrique
Batterie
Réservoir
Figure I.3 Configuration hybride parallèle
double arbre et simple arbre
La particularité de son couplage lui donne
aussi le nom d'hybride parallèle à addition de couple où
à addition de vitesse selon la structure et la conception du
véhicule. La structure à addition de couple additionne les
couples de la machine électrique et du moteur thermique afin de
propulser le véhicule (où pour recharger la batterie). Cette
connexion peut se faire par courroies, poulies, où engrenages
(technologie nommée hybride parallèle double arbre). La machine
électrique peut être également placée sur l'arbre
reliant la transmission au moteur thermique (technologie appelée
parallèle simple arbre). La structure à addition de vitesse
additionne les vitesses du moteur thermique et de la machine électrique.
La vitesse résultante est liée à la transmission. Ce type
de couplage permet d'avoir une flexibilité importante au
Page 11
Chapitre I : Etat de l'Art des Véhicules Hybrides
Existants
niveau des vitesses. La connexion est
réalisée mécaniquement par un train planétaire
(appelé également train épicycloïdal).
Cette architecture demande un contrôle plus
complexe que celui de l'architecture série et demande un travail
supplémentaire pour l'intégration physique des sources
d'énergie.
Néanmoins, des gains non négligeables
peuvent être obtenus, même en utilisant des composants
électriques de faible puissance et de faible capacité. Aussi, ces
gains permettent de compenser le surcoût de cette architecture et le
surpoids lié aux batteries et au moteur électrique.
c) Hybride
série-parallèle
Une architecture série-parallèle,
combine les modes de fonctionnement et les avantages des deux architectures
série et parallèle. La plus connue des architectures hybrides
série/parallèle est celle de la Toyota Prius. Cette
dernière utilise un train planétaire et une première
machine électrique qui permet d'amener le moteur sur ses meilleurs
points de rendement, une deuxième machine participe à la
traction.
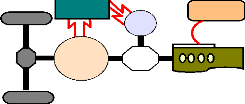
Batterie
Génératrice
Réservoir
Moteur Electrique
Train
Planétaire
Moteur thermique
Figure I.4 : Schéma du véhicule à
double hybridation
Au sein de ces structures, une partie de
l'énergie délivrée par le moteur thermique est transmise
mécaniquement aux roues. Parallèlement, les machines
électriques prélèvent où fournissent de
l'énergie à la transmission pour satisfaire les objectifs
(accélération, charge où décharge de la batterie,
consommation optimale du moteur thermique). Dans la majorité des cas il
y`a deux machines électriques, pouvant chacune être soit motrice
soit génératrice. Cette configuration permet donc au moins 4
modes de fonctionnement ayant chacun certains avantages. Une telle architecture
est décrite sur la figure I.4.
Cette architecture présente l'avantage
d'être très performante, sans l'utilisation d'embrayage où
de variateur de vitesse mais d'une gestion très
délicate.
Page 12
Chapitre I : Etat de l'Art des Véhicules Hybrides
Existants
III.4. Comparaison des différentes structures de
propulsion
Selon la configuration employée, voici quelques
avantages et inconvénients de chacune d'elle
présenter dans le tableau I.2.
Tableau I.2 : Comparaison de diverses
architectures [HOEL03]
|
Type
d'hybride
|
Avantages
|
Inconvénients
|
|
Série
|
Bon rendement énergétique aux faibles
vitesses (mode tout électrique en zone urbaine);
Très bon contrôle du moteur
thermique.
Bonnes performances dynamiques de la
machine électrique (confort
d'utilisation);
Le groupe électrogène n'est pas
nécessairement placé à côté de la machine
électrique de traction : degré de liberté
supplémentaire pour placer les divers composants (exemple du bus
à plancher bas);
Gestion relativement facile (par rapport aux autres
architectures).
Elle est simple à concevoir et à
contrôler.
Elle nécessite très peu
d'équipements
mécaniques (pas d'embrayage ni de boîte de
vitesses).
|
Faible rendement énergétique de
la
chaîne globale (en zone
extra-
urbaine);
Utilisation de 3 machines dont une (la machine
électrique de traction) est au moins de forte puissance (encombrement
maximal) ;
Mode tout thermique impossible.
|
|
Parallèle
|
Bon rendement énergétique ;
Utilisation d'une seule machine
électrique;
Mode tout thermique et tout électrique
(dans
certains cas) possible; Transmission
peu
modifiée (dans certains cas) par rapport au véhicule
conventionnel;
|
Fonctionnement du moteur
thermique plus accru : dynamiques mauvaises ;
La consigne de couple doit être répartie
à chaque instant entre les deux sources de couple.
Couplage mécanique et contrôle
énergétique complexe;
|
|
Mixte
|
Bon rendement énergétique ;
Très bonne répartition de l'énergie
;
Souplesse du véhicule : tous les modes sont
autorisés (thermique, électrique, série, parallèle
où série-parallèle) ;
Pas de rupture de couple à la roue.
|
Utilisation de 3 machines où 2 machines avec 2
embrayages ;
Couplage très complexe et gestion très
délicate ;
Elle nécessite au moins deux
machines électriques en plus du
moteur thermique ce qui la rend
coûteuse et
très lourdes.
|
Page 13
Chapitre I : Etat de l'Art des Véhicules Hybrides
Existants
IV. Conclusion
L'impact positif de l'hybridation des véhicules
sur l'économie de carburant est double. Premièrement, la
présence de batterie permet de faire fonctionner le moteur thermique
à son efficacité optimale. Pour la structure série, cela
est réalisé en concevant le train moteur d'une telle façon
que le moteur thermique travail à une condition de fonctionnement qui
correspond à son efficacité de conversion maximale. Donc, les
sommets dans la demande de puissance sont effectués par la batterie.
Pour la disposition parallèle, le moteur a un fonctionnement meilleur
que dans le cas d'un véhicule conventionnel, principalement à
cause de deux raisons : la minimisation de la masse et l'occasion de
fonctionnement du moteur pendant la conduite urbaine, où
l'économie de carburant du MCI (moteur à combustion interne) est
d'habitude très basse. Dans ce cas, l'épuisement de la charge de
la batterie est indemnisée en allumant le moteur dans des
itinéraires de route et en exigeant plus de puissance pour recharger la
batterie.
Le deuxième avantage important concerne le
freinage régénérateur. Par un tel processus, le
moteur/générateur électrique fournit le moment de torsion
négatif exigé pour ralentir le véhicule, tant dans la
structure série que dans la structure parallèle. Donc,
l'énergie cinétique du véhicule, qui est
généralement perdue sous forme de chaleur dans les
véhicules conventionnels, peut être récupérée
et reconstituée dans la batterie. Le freinage
régénérateur contribue significativement à
l'économie de carburant. Comme par exemple, en conduite urbaine, les
économies de carburant obtenues via le freinage
régénérateur s'étendent jusqu'à 20 % en
respectant les mêmes proportions puissance-poids que les voitures
conventionnelles. D'une vue architecture, l'hybride série, beaucoup plus
implanter dans les bus de transport urbain, me semble assez avantageuse en
terme d'autonomie et de facilité de gestion contrairement au autres
architectures, qui ont besoin d'une gestion très délicate. Elle
présente aussi un bon rendement énergétique en mode tout
électrique en zone urbaine. L'intérêt de cette structure
est de pouvoir utiliser le moteur thermique à son point de
fonctionnement optimal quelle que soit la puissance demandée au niveau
des roues ce qui réduirait les émissions de GES.
Le deuxième chapitre sera consacré au
choix des organes électriques et mécaniques d'un véhicule
hybride série en insistant sur la technologie la plus rependu en termes
de fiabilité, du prix et du rendement.
Page 14
Chapitre II :
Représentation Macroscopique d'un
Véhicule
Hybride Série
I. Introduction
Une fois l'architecture sélectionnée, le
choix de la technologie et le dimensionnement des composants sont essentiels
car ils déterminent non seulement les performances dynamiques du
véhicule (accélération maximale, vitesse et couple
maximale, etc.) mais aussi la consommation moyenne du véhicule et ses
émissions de polluants.
Dans ce chapitre, nous allons décrire le
véhicule hybride série dans son ensemble, ainsi tous les
éléments constituant une chaine de traction série, en
dressant l'oeil sur l'identification et le choix de chaque
élément selon les besoins d'une traction
série.
Le choix de chaque élément ce base sur
le rendement de celui-ci, son impact sur l'environnement, le coût de
fabrication et sa stratégie de commande, le marché offre
certainement plusieurs choix selon le besoin mais dans un système
embarqué tel qu'un véhicule, on cherche toujours à
minimiser son poids totale même si la batterie où l'un des moteurs
offre tous les atouts favorable, reste à le juger sur son poids. Ainsi,
les attentes des consommateurs, les différentes utilisations possibles
du véhicule hybride sont également des facteurs à prendre
en compte.
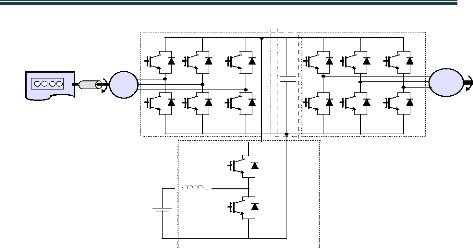
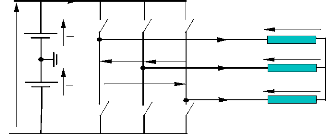
II. Description du modèle série
Dans l'architecture série, le couple transmis
aux roues provient du moteur électrique. Ce dernier est alimenté
par une batterie et/où une génératrice entrainée
par le moteur à combustion. Des convertisseurs de passage seront
définis comme sur la figure II.1. [GUEN11]
Ce système ne fait pas apparaître un
système de commande ni un système de gestion de 1'énergie
de façon à faire fonctionner chacun des moteurs dans sa plage de
haut rendement. Des tels systèmes sont mis en place et décrit au
chapitre IV.
Page 15
Chapitre II : Représentation Macroscopique Véhicule
Hybride Série
REDRESSEUR-ONDULEUR
BUS CC REDRESSEUR-ONDULEUR
Reducteur
GE
MSAP
Moteur Thermique
BATTERIE
HACHEUR
Figure II.1 : Schéma détaillé d'un
véhicule hybride série Pour la suite de l'étude nous
considérerons les sous systèmes suivants :
> Un sous système de
génération (non réversible) : groupe
électrogène constitué d'un moteur thermique, d'un
générateur électrique et d'un convertisseur
électrique ;
> un sous système de traction
(réversible) constitué : d'un convertisseur
électrique,
d'une machine électrique de traction et un
équipement de transmission mécanique ; > un
sous système de stockage d'énergie (réversible)
composé : d'une batterie, d'une
inductance de lissage et d'un convertisseur
électrique.
II.1. Sous système de traction
Le système de traction est composé d'une
machine électrique alimentée par un convertisseur. Un
différentiel mécanique est utilisé pour répartir la
puissance aux roues. Un réducteur permet de coupler le
différentiel à la machine.
a) Machine électrique
Une machine synchrone à aimant permanent est la
plus rependu pour l'entrainement des véhicules hybrides [LHOM07],
grâce aux meilleures performances quelle offre en terme de rendement, du
couple et de la puissance massique, elle présente
l'élément transformant le courant électrique en un couple
(et inversement). Technologie très innovante, aucune alimentation
électrique n'est nécessaire pour le rotor, aucune pollution, peu
de maintenance et relativement facile à commander. Destiné aussi
à faire freiner le véhicule en récupérant de
l'énergie [EHSA05]. Ce qui concerne la mise en marche du moteur
synchrone, peut être
Page 16
Chapitre II : Représentation Macroscopique Véhicule
Hybride Série
réalisée par variation de
fréquence lorsque la fréquence de la tension appliquée
lors du démarrage varie progressivement de zéro jusqu'à sa
valeur nominale.
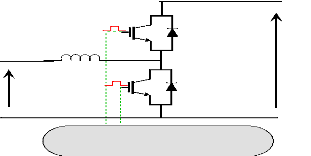
B) Convertisseurs DC/AC (Onduleur)
Il s'agit d'un convertisseur électronique
permettant d'alimenter le moteur électrique en tensions
triphasées, à fréquence variable à partir de la
tension continue de la batterie. Ainsi, la récupération
d'énergie fournis par la machine synchrone qui est en fonction
génératrice en cas de freinage récupératif (figure
II.2).
L'onduleur utilise des valeurs moyennes
intégrées donc des sources de tension et de courant
commandées.
Vbus
K 1 1 K1 2
K 2 1
K 22
K
K 23
1 3
Controle
Figure II.2 : Schéma détaillé d'un
onduleur
L'onduleur peut également fonctionner en mode
saturé. Ce mode est utilisé lorsque la tension du bus n'est plus
suffisante face à la tension interne de la machine synchrone et le
courant demandé ne peut être fourni. Alors, deux sources de
tension sont utilisées (batterie +
génératrice).
C) Boîte de vitesses
En sortie de l'arbre du moteur électrique, un
couple est disponible. Ce couple est transmis aux
roues par l'intermédiaire de plusieurs
éléments mécaniques. Le premier est la boîte de
vitesses dont le rapport de transmission est imposé par un
système hydraulique qui change le diamètre des poulies. Dans ce
travail, on s'affranchit a donner les vitesses sur l'arbre du moteur uniquement
en tour par minute (tr/mn), donc la boite de vitesse ne sera pas
modéliser et son rendement sera pris égal à
un.
Page 17
Chapitre II : Représentation Macroscopique Véhicule
Hybride Série
d) Différentiel
Le second élément mécanique pour
transmettre le couple aux roues est le différentiel (Figure II.3). Cet
élément relie l'arbre de transmission aux roues, permettant
à chacune des roues de tourner à une vitesse différente
l'une par rapport à l'autre.

Figure II.3 : Différentiel [FORU13]
En ligne droite, les roues tournent à la
même vitesse. Cependant dans un virage, afin d'éviter qu'une roue
glisse sur le sol et les efforts de torsion sur les arbres, un dispositif
différentiel est nécessaire. Autrement dit, la puissance
développée sur chaque roue est différente quand le
véhicule tourne. Toutefois la puissance appliquée sur le
châssis du véhicule reste identique (en supposant que la
conversion des roues soit parfaite). En partant de l'hypothèse que le
véhicule roule en ligne droite et que l'on néglige le contact
entre les roues et la chaussée, le différentiel mécanique
n'a aucune utilité d'être représenté. La
modélisation du différentiel mécanique avec les roues du
véhicule peut donc s'apparenter à une seule roue
équivalente. Notons toutefois que son rendement sera pris égal
à 1. [LHOM07]
II.2. Stockeur d'énergie
Pour notre cas, une batterie est utilisée comme
source de stockage d'énergie. Cette batterie est associée
à un hacheur Boost afin de réaliser l'étage de
tension du bus continu. Ce hacheur doit être bidirectionnel,
autrement-dit inverseur en courant.
a) Batterie
C'est l'élément qui assure le stockage
de l'énergie électrique sous forme chimique,
caractérisée par sa capacité et son énergie
massique, afin d'alimenter le véhicule d'une façon permanente.
Les principales technologies utilisées pour les véhicules
hybrides sont : Lithium-ion, Ni-MH, Lithium-polymère ce dernier
présente les meilleures performances mais sa gestion est très
délicate et son prix est élevé. [EHSA05]
Page 18
Chapitre II : Représentation Macroscopique Véhicule
Hybride Série
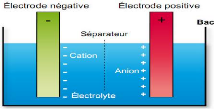
Figure II.4 : Vue interne d'une batterie
[FRUM13]
Le principe de fonctionnement de celle-ci est que la
réaction chimique entre les électrodes et l'électrolyte
provoque une oxydoréduction. Dans ce cas, l'électrode
négative subit une oxydation, c'est-à-dire que la réaction
chimique libère des électrons, tandis que l'électrode
positive subit elle une réduction, autrement dit elle absorbe des
électrons. Ce déséquilibre des charges électriques
génère la F.E.M (Force Électro-Motrice) de
l'accumulateur.
Nominal Current Discharge Characteristic at 0.2C (3A)
Voltage
200
180
160
140
120

Courbe de décharge Zone nominale
Zone exponentielle
0 5 10 15 20
Ampere-hour (Ah)
E0 = 182.0063, R = 0.28333, K = 2.6563, A = 20.4, B = 1
200
180
160
140
120
Voltage
0 5 10 15 20

30 A 60 A
Ampere-hour (Ah)
Figure II.5 : Courbe de décharge d'une batterie
Li-Ion pour différentes charges en Ah
[MATH13]
L'un des objectifs de contrôle d'énergie,
qui sera développé dans le chapitre IV, est de faire fonctionner
la batterie dans la zone nominale (figure II.5) pour un rendement plus
élevé.
Page 19
Chapitre II : Représentation Macroscopique Véhicule
Hybride Série
Les batteries utilisées actuellement dans un
véhicule hybride doivent rependre aux conditions suivantes :
y' Une bonne puissance massique (rapport puissance/poids
en W/kg) permettant de
bonnes accélérations ;
y' Une bonne énergie massique (Wh/kg) synonyme
d'une bonne autonomie ;
y' Une tension stable engendrant des performances
régulières ;
y' Une durée de vie élevée,
calculée en nombre de cycles de
chargement/déchargement,
conduisant à une diminution du coût pour
l'utilisateur ;
y' Entretien faible et recyclage facile.
180
150
VE : Véhicule électrique
VEH : Véhicule Hybride
Power Assist : Véhicule avec
démarreur
Lithium
VE
VEH
Power Assist
NiMH
NiCd
100 200 300 400 500 600 700 800 900 1000
0
0
Plomb
120
90
60
Energie (Wh/kg)
30
Puissance (W/kg)
Figure II.6 : L'énergie massique en fonction de la
puissance massique pour différents types d'accumulateurs
[GUEN11]
Les batteries Nickel-Hydrure de Métal
possèdent toutes les performances déjà soulignés
sauf que leur durée de vie est encore faible pour une batterie de
traction (à forte profondeur de décharge).
Le tableau II.1 présente les différentes
caractéristiques pour différents types de batteries
utilisées dans les véhicules de tractions.
Il est important de souligner que dans le domaine des
batteries, les évolutions sont toujours lentes du fait de la
complexité des systèmes chimiques mis en oeuvre.
[KELLY02]
Page 20
Chapitre II : Représentation Macroscopique Véhicule
Hybride Série
Tableau II.1 : Caractéristique des
différentes batteries pour une application VH [EHSA05]
|
Batteries
|
Energie
Wh/kg
|
Puissance
W/J.g
|
Rendement
%
|
Cycle de
vie
|
Cout
USD/kWh
|
|
Plomb-Acide
|
35-50
|
150-400
|
80
|
500-1000
|
100-150
|
|
Nickel-Cadmium
|
30-50
|
100-150
|
75
|
1000-2000
|
250-350
|
|
Nickel-Métal-Hydrure
|
60-80
|
200-300
|
75
|
1000-2000
|
250-350
|
|
Aluminium-Air
|
200-300
|
100
|
<50
|
/
|
/
|
|
Zinc-Air
|
100-220
|
30-80
|
60
|
500
|
90-120
|
|
Sodium-Sulfure
|
150-240
|
230
|
85
|
1000
|
200-350
|
|
Sodium-Nickel-Chaloride
|
90-120
|
230
|
80
|
1000
|
250-350
|
|
Lithium-Polymère
|
150-200
|
350
|
|
1000
|
150
|
|
Lithium-Ion
|
80-130
|
200-300
|
>95
|
1000
|
200
|
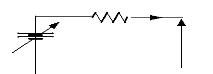
b) Convertisseur associé (Hacheur)
Le convertisseur statique DC/DC, où hacheur, permet
de fournir à partir d'une source de tension fixe une source de tension
de valeur moyenne réglable. La tension d'entrée du convertisseur
DC/DC est la tension de la batterie. La tension de sortie est une tension
régulée et très élevée. Le schéma de
principe de base du convertisseur est représenté dans la figure
II.7. [HIJA10]
1
K
U
bus
L
Ubatterie
K
2
Controle
Figure II.7 : Schéma détaillé d'un
convertisseur DC/DC
Page 21
Chapitre II : Représentation Macroscopique Véhicule
Hybride Série
Le convertisseur DC/DC est un convertisseur
bidirectionnel. En effet, le courant traversant ce système peut circuler
dans les deux sens selon le mode de fonctionnement du véhicule. Dans le
cas où la batterie fournit de 1'énergie, le courant circule de la
batterie vers le moteur électrique et dans le sens inverse si le moteur
fournit de l'énergie à la batterie.
II.3. Groupe électrogène
Ce système est composé du moteur
à combustion interne, de la génératrice et d'un
convertisseur AC/DC. Les différents éléments sont
présentés ci-dessus :
a) Moteur thermique
Le moteur thermique convertit de manière
unidirectionnelle une énergie chimique en une énergie
mécanique (figure II.8). L'énergie chimique provient d'un
réservoir rempli généralement par du gasoil où de
l'essence. L'énergie mécanique résultante de la
conversion, entraîne dans les véhicules traditionnels,
l'alternateur électrique et la traction du véhicule. Dans la
plupart des véhicules hybrides, les chercheurs utilisent des moteurs
classiques à combustion interne et à cycle alternatif : moteur
à allumage commandé (essence) où à allumage par
compression (Diesel).

Figure II.8 : Moteur thermique Diesel à quatre
temps [FORU13]
Notons que d'autres technologies (moteur Stirling,
turbine à gaz, moteur Rankine) peuvent être employées
[BADIN97] mais leurs utilisations sont minimes dans le domaine
hybride.
Deux types de moteur thermique à combustion
interne et cycle alternatif peuvent être utilisés : le moteur deux
temps et le moteur quatre temps. Sans rentrer dans les détails, nous
pouvons dire que le moteur deux temps a été abandonné au
profit du quatre temps en raison d'une consommation élevée et
d'une fumée bleuâtre à l'échappement.
Page 22
Chapitre II : Représentation Macroscopique Véhicule
Hybride Série
La technologie des moteurs diesels a fortement
évolué durant ces dernières années. L'injection
directe remplaçant la préchambre de combustion en est pour
beaucoup. L'amélioration du rendement moteur permet de diminuer ainsi la
consommation des véhicules. Cette raison nous laisse penser qu'un
véhicule électrique hybride devrait nécessairement
utiliser une motorisation thermique de ce type.
Le modèle du moteur thermique utilisé
dans ce mémoire est considéré comme une source mecanique
délivrant un couple (effort) et recevant une vitesse angulaire
(réaction). Le couple demandé est transmis directement au
système (génératrice électrique). On peut dans
certain cas introduire une pseudo-dynamique qui correspond au système
mais qui doit être negligeable devant les autres dynamiques du vehicule.
Il faut pas oublier que l'un des objectifs de hybride est de faire fonctionner
le moteur thermique dans son rendement élever et le situé dans
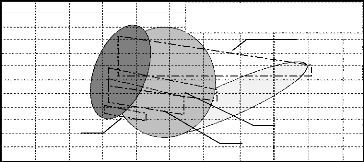
les zones les plus économique [LHOM07]. La figure II.9 présente
un exemple d'une carthographie d'un moteur thermique Renauld K9K qui donne une
idée sur le point de fonctionnement d'un moteur thermique.
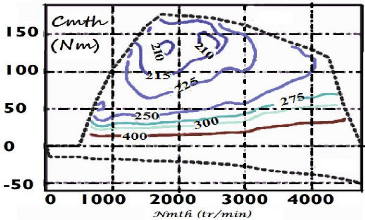
Figure II.9 : Carthographie d'un moteur Diesel Renauld
K9K [LHOM07]
Cette table appelée carthographie (Figure
II.9), correspond à la consommation spécifique Cs
en (g/kWh), en fonction du couple et de la vitesse. Les
caractéristique maximales et minimales sont représentées
par les traits en pointillés. Contrairement au moteur électrique,
un moteur thermique possède plusieurs points de fonctionnement qui se
situent dans la surface delimité par les traits bleus.
Page 23
Chapitre II : Représentation Macroscopique Véhicule
Hybride Série
b) Génératrice
La génératrice électrique
utilisée pour convertir l'énergie mécanique du moteur
thermique en énergie électrique sur le bus continu, est de type
synchrone à aimant permanent. Une machine synchrone à excitation
séparée avec un simple pont de graëtz triphasé est
viable mais ceci requiert l'utilisation du démarreur conventionnel pour
pouvoir démarrer le moteur thermique. [VIDO04]. La
génératrice doit être de même dimension que le moteur
thermique (vitesse nominale et couple nominal).
Dans un système comme le véhicule
hybride, la dynamique d'une machine électrique est beaucoup plus rapide
que celle du véhicule. Comme pour le moteur thermique, une
modélisation énergétique peut être requise dans
certain cas (en néglige le régime dynamique). Le convertisseur
associé (redresseur triphasé) à cette
génératrice, peut être contrôlé de
différentes manières. Selon le choix, la commande peut être
choisie de sorte à minimiser les pertes où à assurer une
bonne qualité des signaux de sortie. Le but de ce mémoire est
d'associer une commande à minimisation de perte, cette commande sera
l'objet dans les chapitres qui suivent.
II.4. Bus continu (noeud du couplage
énergétique)
Le bus continu, matérialisé par un
condensateur de filtrage, est traversé par tous les flux
énergétiques du véhicule (Figure II.1). Des fluctuations
importantes de la tension du bus peuvent diminuer les performances dynamiques
de la traction. Ces fluctuations peuvent donc avoir une influence sur le
rendement énergétique du système. C'est pourquoi le
condensateur est représenté par un élément
d'accumulation d'énergie potentielle (condensateur électrolyte
par exemple).
Pour notre cas d'étude, chaque couplage
électrique représente un noeud de courant. Notre système
en compte trois. Ces couplages étant tous de même nature, la
modélisation du système viserait à représenter ces
couplages en une unité avec le condensateur du bus continu comme tampon
d'énergie. Néanmoins, nous verrons par la suite que le
contrôle de la tension du bus continu ne peut être assuré
que par l'ensemble du système de stockage (par le réglage du
courant du hacheur).
III. Conclusion
Au cours de ce chapitre, nous avons
présenté les éléments de base de la chaine de
traction des véhicules hybrides séries en penchant sur les
technologies disponibles.
Chapitre II : Représentation Macroscopique Véhicule
Hybride Série
Dans notre cas, la chaîne de propulsion
électrique assure seule le déplacement du véhicule, le
MSAP est une solution adaptée pour ses performances technique et en
particulier, sa capacité, son rendement et les valeurs
élevées des rapports couple/masse et puissance/masse. Quoique le
prix des aimants permanents est élevé et ne permet pas, à
ce jour, de satisfaire la contrainte sur le prix de vente.
La batterie constitue l'élément central
de la transmission hybride série vers lequel convergent l'ensemble des
contraintes de puissance, son fonctionnement en tampon permet de
déconnecter la dynamique du moteur thermique de celle du
véhicule.
L'onduleur permet d'alimenter la MSAP en tension
triphasée, comme il peut varier sa vitesse dans une plage bien
définie. Il assure aussi le redressement du courant au mode freinage
afin de le transmettre vers la batterie sous forme continu.
Le convertisseur DC/DC, dit aussi hacheur, permet de
stabilisé la tension sur le bus continu toute en assurant le
réglage progressif et sans perte notable. Il permet aussi de
réguler le couple du moteur et donc du véhicule en traction mais
aussi en freinage électrique.
Nos choix sur les éléments selon
l'architecture série est mis au point. Dans le chapitre suivant, nous
abordons la modélisation de notre système selon la partie
dynamique (couple, vitesse, forces,...) et la partie motorisation (source,
convertisseur, moteurs,...). Seul les éléments qui ont relation
avec notre stratégie de commande seront détaillés
(convertisseurs et machines électriques tournantes).
Page 24
Page 25
Chapitre III :
Modélisation d'un Véhicule Hybride
série
I. Introduction
Afin de pouvoir arriver à simuler un véhicule
hybride série et pourvoir développer une
stratégie de commande, il faut être capable de
déterminer quels sont les couples et les vitesses imposés au
moteur de traction en interaction avec le profil de la route. Pour ce faire,
nous établissons un bilan des efforts appliqués au
véhicule.
Apres avoir élaboré le modèle dynamique,
la seconde étape consiste à modéliser les
éléments internes de chaque sous systèmes à fin de
pouvoir simuler le comportement de ces derniers sur logiciel Matlab/Psim, ce
qui nous donnera une vue approximative de la nature de la stratégie de
commande a réalisé.
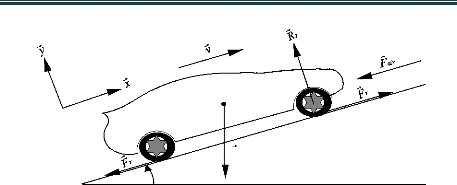
II. Modèle mécanique du
véhicule
Le comportement d'un véhicule en mouvement le long de
son sens de déplacement est déterminé par toutes les
forces qui agissent sur lui dans cette direction. La figure III.1 montre les
forces agissant sur un véhicule en mouvement. L'effort de traction
F~ dans la zone de contact située entre les pneus des roues
motrices et la surface de la route propulse le véhicule vers l'avant.
Elle est produite par le couple de la centrale, et ensuite
transféré à travers la transmission aux roues motrices.
Lorsque le véhicule est mobile, il y'a une résistance qui tente
d'arrêter son mouvement. Elle comprend en général la
résistance au roulement, la traînée aérodynamique et
la résistance en montée.
~~~~
Le modèle mécanique du véhicule doit
permettre de calculer la puissance nécessaire pour propulser ce dernier
en fonction de ses caractéristiques, de sa vitesse et de son
accélération. Afin de calculer la puissance nécessaire
à l'avancement du véhicule, on applique le principe fondamental
de la dynamique (P.F.D.),
M dt = ? F~ext (III.1)
Chapitre III : Modélisation d'un Véhicule Hybride
série.
G
P
á r
Figure III.1 : Bilan des forces sur le
véhicule Le bilan des forces extérieures au véhicule est
illustré par la figure III.1.
dV~ ~ ~~ ~~~~ ~~~
~~~~
MV ~~ =F air + P + Fr + Ft + Rr . (III.2)
Page 26
~
La force équivalente à la résistance de
l'air F air sur le véhicule est donnée par
l'équation :
F~air = -1 ~~ ! V S Cx
~~, (III. 3)
~
La résistance des roues sur le sol Fr
est donnée par la formule :
F~r = -P Cr cos a z, (III.4)
D'après la figure III.1 on peut voir que la composante de
la force de traction F~t suivant ÿ
est nulle, on porte dans ce cas les équations que sur l'axe
z.
dv
Mv
~~ = +- 1 ~~ ! V S Cx - Mv g sin ) -
Mv g C! cos ) + Ft/ ~~ (III.5)
dt ~
L'expression de la force de traction Ft
mécanique est :
dv
Ft = Mv 1
dt + 2 Pair V2S Cx + Mv g
sin a + Mv g Cr cos a, (III.6)
La puissance mécanique (Pm)
nécessaire à l'avancement du véhicule est égale au
produit de la force de traction et de la vitesse,
Pm = Ft, (III.7)
Donc, d'après (III.5) et l'expression de la puissance de
traction du véhicule en fonction de la
vitesse V et de l'accélération
dv est :
dt
Page 27
Chapitre III : Modélisation d'un Véhicule Hybride
série.
~~
1 = ~ +~~ ~~ + ~ ~~ r 2 S C$ + ~~ g sin ) +
~~ g Cr cos )/. (III.8)
2
III. Modélisation des éléments
internes du véhicule
III.1. Groupe électrogène
Comme on ne dispose que de connaissance très
limités à priori du fonctionnement du moteur thermique,
développer un modèle mathématique adéquat serait
délicat. Mais le faite d'avoir une architecture de base série, on
ce permet de remplacer le moteur thermique par un MSAP.
III.2. Modélisation du MSAP
Afin d'aboutir à une formulation plus simple et de
réduire la complexité du modèle, nous optons pour les
hypothèses suivantes :
· Le moteur est à pôles lisse sans
amortisseurs et il possède une armature symétrique non
saturée, les inductances propre et mutuelle sont indépendantes
des courants qui circulent dans les enroulements.
· Les pertes fer sont négligées.
· La perméabilité des aimants est
considérée comme voisine de celle de l'air.
· Le flux d'excitation de l'aimant permanent est
considéré constant.
Equations de tensions et flux :
2v34 = 2R342i34 + at
2534 (III.9)
2 534 = 263342i34 + 7589 (III.10)
cos (è)
2
cos (è -n)
3
4T[
[cos (è ? )
3
Et :
7589 = 538 (III.11)
Equation (III.11) étant l'expression de flux
engendré par les aimants, et 538 la valeur crête (constante)
crée par l'aimant à travers les enroulements statoriques.
On remarque que l'équation (III.9) est non
linéaire et couplée, pour supprimer ce problème on adopte
des changements de variable et des transformations qui réduisent la
complexité du système. Dans ce cas nous procédons à
la transformation de Park, qui consiste à transformer les enroulements
immobiles (a, b, c) par des enroulements (d, q) qui tourne avec le rotor.
Chapitre III : Modélisation d'un Véhicule Hybride
série.
A l'aide de la transformation de Park, on passe des grandeurs
statoriques réelles (tension, flux courant) à leurs composantes
fictives appelées les composantes d-q
d
Axe de reference
Axe rotor
Vas
q
Vcs
Vbs
Figure III.2 : Schéma d'une machine
synchrone à amant permanent
2P(@)4 = A
=
(III.12)
?sin(è) ?sin(è ? ~< = ) ?sin (è +
~< = )
cos (è) cos (è ? = ) cos (è + ~< = )
v~ v~
~ ~ ~< v~ F
~ G
H G G
Page 28
2P(@)4 étant la matrice de la transformation de Park
qui permet le passage des grandeurs statoriques 2I34,
2534 et 2J34 à leurs composantes relatives
7IdK9, 2JdK4 et 25dK4.
L'application de la transformation du Park à
l'équation (III.9) donne après développement : Les
équations électriques :
~ ~
~~ = LM (~~ - ~ ~~ + 6KNO~K) (III.13)
~~
~~
K = (K - ~ K - 6~NO~~
- 58 Q R) (III.14)
~~ LP
Expression de couple électromagnétique :
#O = Q(S6d - 6KTidiK + 58iK) (III.15)
Les équations mécaniques :
|
d
dt
|
~
R = U (#O - V R - #!) (III.16)
|
dt
dW = Q R (III.17)
Page 29
Chapitre III : Modélisation d'un Véhicule Hybride
série.
III.3. Modélisation de la batterie
Ce modèle est en fait une source de tension
contrôlée et branchée en série avec la
résistance interne de la batterie comme sur la figure (III.3). La
tension en circuit ouvert est calculée grâce aux équations
(III.21) et (III.22) à partir de l'état de charge de la batterie
(SOC), selon les équations suivantes :
Rb
Ib
Ub
Eb
Figure III.3 : Modèle électrique
équivalent de la batterie
La tension en charge est déduite directement à
partir de la tension à vide et de la chute de tension due à la
résistance interne série :
Ub = Eb - Rblb (III.18)
Avec :
On appelle état de charge de la batterie SOC (State
Of Charge) le rapport entre la quantité d'électricité
restante à l'instant t (Q(t)) sur sa
capacité nominale (QMAx). Le SOC est souvent
donné en %. [MATH13]
SOC(t) = Q(t) . 100 (III.19)
QMAX
La capacité de la batterie à l'instant t
est donnée par l'équation ci-dessous :
Q(0=
Q(0)-f ot
rib . lb dt
(III.20)
Le model pendant la décharge
(i*>0) :
f1(it, i*, i) = Eb -
K. Q
Q- t . i* - K. Q
Q-it.it - A. e(-e.t.t) (III.21)
Le
model pendant la charge (i*<0) :
f2(it, i*, i) = Eb -
K. QQ . i* - K. Q- Q .t . i. ~ - j. ~(-k. .t)
(III.22)
| t|mo.~
(III.23)
Page 30
Chapitre III : Modélisation d'un Véhicule Hybride
série.
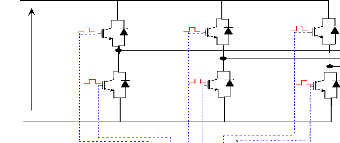
III.4. Modélisation de l'onduleur de tension
L'onduleur de tension qui alimente la MSAP peut être
idéalement représenté selon la figure (III.4), où
Ki et Kin (i=a, b, c) sont des
transistors IGBT monter en antiparallèle avec des diodes, Si et S'i sont
les commandes logiques qui leurs sont associées telle que :
o si Si = 1 : l'interrupteur Ki est passant et
Kin est ouvert,
o si Si = 0 : l'interrupteur Ki est ouvert et
Kin est passant.
On suppose que l'alimentation de l'onduleur est comme une source
parfaite, constituée par deux générateurs de f.é.m.
égale à vpqr connectés entre
eux par un point noté n0.
~
Ias
Vas
K2 K3
Ubc
2
K'1 K'2 K'3
n0
U0
2
U0
K1
Ibs
Vbs
Ics
Vcs
Vbus
Uab
Uca
Figure III.4 : Schéma équivalent
de l'onduleur
L'onduleur est constitué de trois bras, chaque bras est
constitué de deux transistors dont la commande est
complémentaire. Chaque bras de l'onduleur peut être
présenté par un interrupteur à deux postions comme
l'indique la figure III.4. La machine synchrone est connectée en
étoile, Vbus est la tension de bus continu alimentant
l'onduleur de tension.
Les tensions de lignes délivrées par l'onduleur
sont :
Uab = Vas - Vbs = Vbus(Sa - Sb) t Ubc = Vbs - Vcs = Vbus(Sb
- Sc) Uca = Vcs - Vas = Vbus(Sc - Sa)
Les tensions Vas , Vbs et Vcs
forment un système de tension triphasées
équilibrées :
Vas + Vbs + Vcs = 0 (III.24)
Page 31
Chapitre III : Modélisation d'un Véhicule Hybride
série.
|
D'où :
I3 = {|}~
xz = (2" - "Y - "u)
IY3 = {|}~ = (2"Y -
"a - "u)
y xIa3 = {|}~
= (2"u - "Y - "a)
w
Donc :
|
(III.25)
|
|
Ia3
IY3 €
Iu3
|
=
|
{|}~
|
2
-1
-1
|
-1
2
-1
|
-1 "a
-1 € "Y €
2 "u
|
(III.26)
|
|
=
|
III.5. Modélisation du Hacheur
Le convertisseur DC/DC employé dans notre travail est
composé de deux transistors IGBT (K1 et K2) et d'une
bobine (L) branchés comme à la figure III.5.
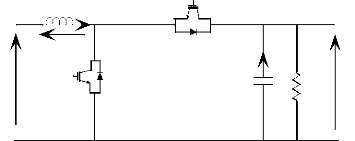
L
K2
iL
vL
K1
iC
C R
Vb
Vbus
Figure III.5 : Hacheur élévateur
bidirectionnel
· Analyse en régime permanant du convertisseur
élévateur :
Pour contrôler l'ondulation du courant dans
l'inductance L, il faut étudie les deux états de
l'interrupteur K1.
a. K1 fermé :
En négligent les ondulations dans le convertisseur, il
est établi que :
v I (III.27)
Dans ce cas, la tension aux bornes de l'inductance et le
courant traversant le condensateur sont égaux à :
IL = IY (III.28)
iu = - {|}~ (III.29)
Page 32
Chapitre III : Modélisation d'un Véhicule Hybride
série.
b. K1 ouvert :
Encore une fois, en négligeant les oscillations, il est
établi que :
v I (III.30)
iL JL (III.31)
Lorsque le transistor K1 devient ouvert, la tension
au borne de l'inductance et le courant traversant le condensateur sont
égaux à :
IL = IY - IYs3 (III.32)
iÉ = L - {|}~ (III.33)
Donc :
IL = IY - IYs3 (III.34)
iu = JL - {|}~ (III.35)
Au finale, on peut déduire des équations
précédentes la tension aux bornes de l'inductance au cours d'une
période de commutation :
e IL() = IY . ).... + (IY - IYs3). )n....
(III.36)
f
). ... = ...†‡ et )n. ... = ...†88:
Respectivement temps d'ouverture et de fermeture du transistor k1.
En égalisant l'expression (III.37) à
zéro et en groupant les termes, la formule suivante est obtenue :
IY. () + )n) - IYs3. )n = 0 (III.37)
Or:
() + )n) = 1 (III.38)
L'expression (III.38) donne
:
IYs3 = {| (III.39)
à%o
Le même principe sera employé pour obtenir le
courant traversant le convertisseur. Le courant sur une période de
commutation est égal à :
e u() = - {|}~
. ). ... + +1 - {|}~
/ . )n. ... (III.40)
f
En regroupant les termes semblables et en égalant la
dernière équation à zéro, l'équation
suivante est obtenue :
Page 33
Chapitre III : Modélisation d'un Véhicule Hybride
série.
- {|}~ . () + )n) + J. )n = 0
(III.41)
La résolution de l'équation
précédente nous donne le courant traversant le convertisseur :
{|}~
J = (III.42)
.à%o
IV. Conclusion
A travers ce chapitre nous avons présenté les
équations mathématiques utilisées pour la
modélisation de chaque élément du véhicule hybride
série séparément. Tous ces modèles permettent
d'établir et de valider les lois de commandes. Ainsi, cette validation
s'effectuera par des simulations qu'on présentera dans le dernier
chapitre. La partie mécanique a était modélisé avec
un modèle quasi statique.
Dans le chapitre qui suit, nous allons présenter les
divers techniques de commande utiliser dans les véhicules en
générale, soit hybride où électriques, et des
résultats de simulations seront a l'issus de valider les techniques
proposés.
Page 34
Chapitre IV :
Techniques de Commande pour Véhicule Hybride
Série
I. Introduction
On s'attend à ce que les véhicules
hybrides aient une consommation de carburant inférieure à celle
de leur homologue conventionnel tout en conservant les mêmes
performances. La principale différence concerne la gestion de deux
sources d'énergie : si les stratégies de commande doivent aller
dans le sens de la réduction de la consommation moyenne de carburant, il
est nécessaire d'y intégrer la gestion de la deuxième
source d'énergie et c'est ce qu'on va chercher à
développer dans ce chapitre.
L'autonomie du véhicule en mode tout
électrique, moteur thermique éteint, est très souvent
petite. Dans ce cas, la gestion de la batterie peut revenir, par exemple,
à maintenir l'état de charge dans des limites acceptables.
Cependant, l'état de charge doit rester assez bas pour pouvoir profiter
du freinage récupératif sans surcharger la batterie et
suffisamment haut pour assurer, à tout moment, une autonomie minimale en
mode électrique pur.
La suite de ce chapitre présente quelques
stratégies de commande qui ont été appliqué sur des
véhicules hybrides. Elles sont regroupées en deux classes. L'une
d'elle correspond aux stratégies dont la synthèse fait appel
à des connaissances empiriques. Dans ce contexte, un des formalismes
fait appel à des régulateurs à base de règle
nombreuse pour la synthèse de ces derniers. La deuxième classe
concerne des stratégies basées sur l'analyse des échanges
énergétiques entre les différents organes du groupe
motopropulseur et le véhicule [CALLA01].
II. Stratégies de commande basées sur
une minimisation instantanée de pertes
II.1. Commandes de l'ensemble convertisseur / machine
électrique
Dans le contexte de la traction électrique, le
rendement énergétique de l'ensemble de la chaîne de
traction est primordial. En effet, la source d'énergie étant
limitée, la consommation énergétique doit être
réduite autant que possible. Nous nous intéresserons à
établir différentes stratégies maximisant le rendement de
l'ensemble convertisseur / machine électrique. Ainsi, pour une machine
donnée, l'obtention du couple désiré par l'utilisateur
peut être obtenue pour différents états magnétiques
du stator et du rotor.
Page 35
Chapitre IV : Techniques de commande d'un Véhicule Hybride
Série
II.1.1. Commande MLI
La commande souvent adaptée aux convertisseurs
statiques est la stratégie MLI. Plusieurs méthodes ont
été développées avec l'objectif de
générer à la sortie de l'onduleur une tension
sinusoïdale ayant le moins d'harmonique possible. Le principe de cette
stratégie est la détermination des portions de temps
(durée de modulation) qui doivent être allouées à
chaque vecteur de tension durant la période d'échantillonnage.
Cette commande rapprochée permet de déterminer les
séquences des allumages et des extinctions des composants du
convertisseur et de minimiser les harmoniques des tensions appliquées au
moteur. Pour un entraînement à courant alternatif performant, on
préfère une stratégie de commande évoluée.
Le contrôle par flux orienté est une méthode
appropriée pour satisfaire des performances élevées.
[CAPI02]
La réduction des pertes, dans le cadre de la
variation de vitesse, a été traitée depuis longtemps, de
plusieurs points de vue :
· La réduction des pertes de la machine,
liée en général à la qualité des courants
imposés par une certaine commande de l'onduleur
· la réduction des pertes dans l'onduleur
: par commutation et par conduction.
a) La MLI Intersective (sinus-triangle)
C'est la modulation la plus classique, les ordres de
commande des interrupteurs de puissance sont générés
à partir de la comparaison des signaux de référence
sinusoïdaux Vma , Vmb
et Vmc ,
appelées modulantes, de fréquence égale à
f, et du signal de modulation
triangulaire Vi,,
appelé porteuse de haute fréquence
fc. La figure suivante illustre le
principe de ce type de modulation. [LABR09]
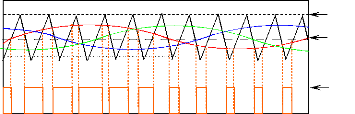
)
vp ( t
)
vma ( t
Sa
Figure IV.1 : Principe de la technique MLI Intersective
(sinus-triangle) Deux paramètres caractérisent ce type de
modulation :
· L'indice de réglage : défini par le
rapport m = fc/f.
Page 36
Chapitre IV : Techniques de commande d'un
Véhicule Hybride Série
· Le coefficient de réglage :
défini par le rapport des amplitudes des modulantes et de la porteuse
r = 1Tm/Vpmax . Généralement, ce coefficient est
compris entre 0 et 1 (l'amplitude de la référence reste
inférieure à celle de la porteuse).
Le fondamental des trois tensions simples
(mesurées par rapport au neutre du réseau) à
l'entrée du pont redresseur triphasé est représenté
par les expressions ci-dessous :
|
va(t) = ~ ~ Vbus r sin(ùt)
~ vb(t) = z Vbus r sin(ùt - ~.!"
# ~
~ ~vc(t) = ~ sin~ùt + ~.!"
~ ~ ~~~~ ~ # ~
|
,
|
(IV.1)
|
Dans notre cas, la porteuse est supposée
comprise entre 0 et 1, comme le montre la figure IV.1, les modulantes ont les
expressions suivantes :
|
~vina(t)= 1
+ 1 r sin(ùt)
~
~vmb(t) = 2 + ~ ~ sin~ùt - ~.!"
# ~
~
~
~~
~ ~~~~~~ = ~ ~ + ~ sin(ùt+ ~.!"
# ~
~
|
(IV.2)
|
Dans le cadre de cette étude, nous utilisons la
MLI Intersective (sinus-triangle). Dans ce cas, une porteuse délivrant
un signal triangulaire alternatif de haute fréquence (27kHz) fixe la
fréquence de commutation des interrupteurs de l'onduleur de tension. Ce
signal triangulaire
*
d'amplitude crête
Vbus/2, est comparé
à trois tensions instantanées de référence
vn' (signal
modulante) sortant des régulateurs du type PI. Les
intersections de ces deux signaux génèrent les ordres de commande
des bras de l'onduleur. La figure IV.2 illustre le principe de cette
méthode de commande en monophasé.
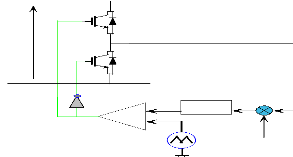
*
I
S1
S1'
*
Vs
a
PI
+
+
Vbus
-
-
Ia
Porteuse
Figure IV.2 : Schéma bloc d'une commande
MLI
Page 37
Chapitre IV : Techniques de commande d'un
Véhicule Hybride Série
II.1.2. Commande vectorielle pour un asservissement de
vitesse
a) Principe
La technique de la commande vectorielle est
utilisée pour établir un modèle linéaire et
transformer la machine synchrone à aimants à une structure
équivalente à une machine à courant continu à
excitation séparée, c.-à-d. un modèle
linéaire et découplé, ce qui permet d'améliorer son
comportement dynamique. [NABT10]
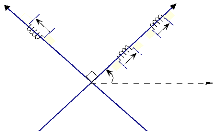
q
=
id
0
Vq
iq
Vd
d
if
Vf
è
a
Figure IV.3 : Principe de la commande
vectorielle
Par conséquent, le flux rotorique est
situé à un angle téta ()) par rapport
à l'axe réel de la phase a. L'application de la commande
vectorielle nécessite que l'axe des courants *+ soit en
quadrature par rapport au flux rotorique, ce qui conduit à ce que la
composante *, du courant statorique soit colinéaire au
flux rotorique, si le courant *, est dans la même
direction que le flux rotorique, le flux statorique suivant l'axe d
s'ajoute aux flux des aimants ce qui donne une augmentation au flux
d'entrefer, d'autre part si le courant -, est négatif
le flux statorique sera en opposition à celui du rotor ce qui donne une
diminution du flux d'entrefer (défluxage), les machines synchrones
à aimants permanents sont conçues de telle façon que les
aimants puissent donner un flux d'entrefer nécessaire jusqu'à la
vitesse nominale.
Normalement le courant *,doit être
nul lorsque le système travaille à couple constant. Donc
:
Si le courant *, est forcé
à zéro i égale à *+, la
composante ., du flux statorique devient :
., = ./ (IV.3)
Et la forme de couple électromagnétique
sera :
12 = 3 ./ *+ = 4 *+ (IV.4)
Page 38
Chapitre IV : Techniques de commande d'un
Véhicule Hybride Série
Nous constatons que l'équation du couple est
analogue à celle du couple de la machine à courant continu
à excitation séparée et qu'un contrôle
indépendant du couple et du flux est établi (découplage)
[REKI91].
La référence de la composante directe
des courants statoriques est égale à zéro
(id* = 0). Cette composante est nulle
afin d'obtenir un facteur de puissance unitaire (la puissance réactive
créée et les pertes associées sont donc nulles). De plus
les inductances sur les axes q et d étant
égales ( Ld = Lq ), la composante
id n'affecte pas le calcul du couple
électromagnétique (équation IV.4).
La figure IV.4 représente le schéma
global de la commande vectorielle d'une machine synchrone à aimants
permanents dans le repère d-q qui a été
réalisé dans ce mémoire.
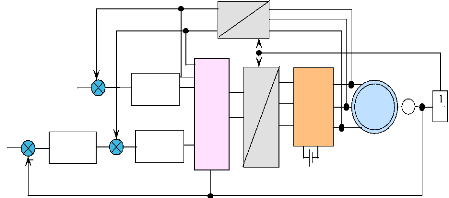
? *
?
+
id * =0
PI
+
i q
id
-
+
*
i q
-
PI
PI
Bloc de découplage
dq
vd *
v q
*
abc
dq
abc
Onduleur MLI
Vbus
MSAP
devitesse
Capteur
C
S
è
Figure IV.4 : Schéma global de la commande
vectorielle
La référence du courant direct
id* est fixée égale
à zéro et la sortie du régulateur de vitesse
iq* constitue la référence
du couple C2* . Les
références des courants
iq* et
id* sont comparées
séparément avec les courants réels mesurés de la
machine id et iq. Les
erreurs des courants sont appliquées à l'entrée des
régulateurs classiques de type PI. Un bloc de découplage
génère
*
les tensions de références
vd et
vq* .
Les sorties du bloc de découplage
vd* et
vq* passent par une transformation
biphasée vers triphasée se qui nous donne les trois tensions de
référence.
Page 39
Chapitre IV : Techniques de commande d'un
Véhicule Hybride Série
b) Découplage
Comme il est loisible de le remarquer, les courants
*, et *+ dépendent
simultanément des grandeurs d'entrées v, et
v+. Nous avons ici un système multi variable
à deux entrées et deux sorties coupler. Afin de pourvoir mettre
en place des commandes mono variables, on va rechercher à partir des
équations qui régissent le régime dynamique du moteur une
contre réaction qui découple le système.
En reprenant les équations électriques
(III.13 et III.14) de la MSAP et en mettant :
7
, 8 = ~, + 9+
~IV.5~
~+8 = v+ + 9,
Avec :
*+ (IV.6)
*, + ;2 ./ (IV.7)
7
v, = V,8 - 9+ (IV.8)
v+
= V+8 +9, On peut conclure le schéma bloc
de la compensation par la figure IV.5
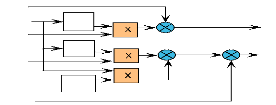
'
d
v
e
ù
i
q
id
v
' q
e q
+
-
vd
ed
+
-
+ +
L q
vq
? f
L d
Figure IV.5 : Schéma bloc de
découplage
c) Calcul des régulateurs
Comme on l'a déjà mentionné, la
régulation est effectuée à l'aide des régulateurs
de type PI (proportionnelle, intégrale). Les algorithmes, même les
plus performants, sont toujours une combinaison de ces actions. Nous avons
adopté un régulateur PI dont le coefficient intégral
4' sert de réduire l'écart entre la consigne et
la grandeur régulée donc de réduire le dépassement.
Comme le terme proportionnel 4p permet le
réglage de la rapidité du système et donc le temps de
réponse.
Chapitre IV : Techniques de commande d'un
Véhicule Hybride Série
v Régulateur de vitesse :
Dans un système embarqué telle qu'un
véhicule, on ne s'attend pas à ce qu'il aura des oscillations,
autrement, on va chercher une régulation adapté à un
régime critique.
La situation est devenue similaire à celle de
la machine à courant continu. La vitesse est mesurée directement
et il est possible de former sa régulation en utilisant un
régulateur PI (figure IV.6). Au niveau du calcul des paramètres
du régulateur. Le processus à commander est
décomposé en deux sous système.
> Sous système du réglage de courant
*+ donc du couple aussi.
> Sous système de la partie
mécanique.
La boucle de régulation de la vitesse est
représentée par la figure IV.6 :
C r

? *
+
-
K K iw pw+
s
i q
*
+
-
KK i p
+
S
1
Rs
+Lq.s
iq
p.?f
Ce *
-
Js. +
1
f
?
Figure IV.6 : Boucle de régulation de la
vitesse.
?(3) =B
@A.s (IV.9)
1@A.s@ sF
CDE
Avec :
H =
IJE
(IV.10)
IDE
Sachant que la fonction de transfert d'un système
de second ordre est :
|
~
L(3) = 1@ FM s@
|
|
|
(IV.11)
|
|
P
|
sF
|
NO NO
Par analogie, on essayera de trouver les
paramètres du régulateur (PI)
|
IDE Q
|
= ;R,H =
|
2T . UO
|
(IV.12)
|
Page 40
Pour un amortissement critique
Chapitre IV : Techniques de commande d'un
Véhicule Hybride Série
WQ
4'V = , 4V = 4'V. H.
~IV.13~
AF
On prendra H = 0.8X, sachant que la
constante du temps électrique doit être inferieur à la
constante du temps mécanique.
· Régulateur du courant :

K i
K +
p
s
1
R + Ld .s
s
id*
+
_
Figure IV.7 : Boucle de régulation du courant
id
id
Page 41
La fonction de transfert en boucle fermée, nous
donne un système de type 1er ordre avec une constante du
temps électrique :
YX
H9 = ~IV.14~
4*
?(X) = ~ (IV.15)
A[.s@1
Le temps de réponse t\2p est
défini par l'instant où la grandeur de sortie vaut 95 % de la
valeur finale donnée lorsque le temps t devient infini,
soit :
t\2p
4 =
4' =
|
= 3. H2
]^
|
3.~IV.17~
(IV.16)
(IV.18)
|
|
|
|
II.3. Stratégie de commande de l'ensemble
Convertisseur / Batterie
Le contrôleur du convertisseur DC/DC asservit la
tension du bus continu de 500V. Son rôle est de maintenir la tension
à ce niveau, peu importe les perturbations.
II.3.1. Régulation par boucle de courant
(CMC)
Cette méthode permet d'augmenter les performances
de régulation en apportant des informations concernant le montage. La
grandeur utilisée est le courant dans la self. Il est important de
contrôler le courant parcourant l'inductance afin de le limiter lors de
la charge
Page 42
Chapitre IV : Techniques de commande d'un
Véhicule Hybride Série
où de la décharge de la batterie. Ce
courant sera donc utilisé pour modifier la loi de commande MLI. En
réalité deux boucles seront réalisées : une boucle
de tension et une boucle de courant. L'erreur en tension va alors servir de
référence en courant virtuel.
Vbus *

+
-
PI
iL *
+
-
PI
á
diL dá
iL
dvs dá
Vbus
Figure IV.8 : Schéma de principe de la commande
par boucle de courant
Cette stratégie a l'avantage de
contrôler la tension et le courant. Elle semble donc tout à fait
indiquée pour notre application, elle va nous servir aussi dans le
contrôle énergétique.
II.4. Stratégie de commande de l'ensemble
convertisseur/groupe électrogène
Nous avons proposé un modèle qui va
s'occupé de fournir le surplus de puissance demandé par la
machine de traction qui va ce comporter comme un moteur thermique, en rappelant
que la batterie est limitée à 20 kW. Ce modèle est
semblable à un MSAP commandé en vitesse. La vitesse de
référence est calculé de manière a situé la
machine dans un point de fonctionnement (figure II.8). Cette MSAP est
raccordé, par un système qui traduit le fonctionnement d'un
embrayage, à une autre MSAP qui va servir d'une
génératrice de 30kW. Un redresseur MLI est rajouté pour
fixé la tension de bus continu à 500V lorsque le système
de stockage électrique est déconnecté de reste du
système.
II.4.1. Commande du redresseur par la méthode
MLI à bande d'hystérésis (HBCC)
La méthode de la bande
d'hystérésis permet la commutation des interrupteurs du
redresseur lorsque l'erreur entre le signal et sa consigne excède une
amplitude fixée. Cette amplitude est communément appelée
fourchette où bande d'hystérésis cette technique ne
demande qu'un comparateur à hystérésis par
phase.
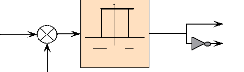
-
H
2
H
2
i
+
*
-
i
Sci
Sci
1
0
Figure IV.9 : Schéma de principe de la commande
par Hystérésis
Page 43
Chapitre IV : Techniques de commande d'un
Véhicule Hybride Série
Le comparateur à hystérésis
fonctionne selon le principe expliqué dans la Figure IV.9,
l'interrupteur s'ouvre si l'erreur devient inférieure à -H/2, il
se ferme si cette dernière est supérieure à +H/2,
où H représente la fourchette (où largeur)
d'hystérésis. Si l'erreur est maintenant comprise entre -H/2 et
+H/2 (c.-à-d., qu'elle varie à l'intérieur de la
fourchette d'hystérésis), l'interrupteur ne commute
pas.
Scl et Scl sont les
commandes logiques qui sont associées aux interrupteurs du redresseur.
II.4.2. Configuration des circuits de contrôle
Diverses méthodes ont été
proposées par les auteurs pour déterminer les courants de source
de référence. Dans notre travail, la méthode
utilisée consiste à employer un détecteur de crête.
L'amplitude des courants de source est générée par une
boucle de régulation de la tension du bus continu en utilisant un
régulateurs PI. [MARI01]
Les courants de référence
iga
* , igb*
et igc* sont calculés
à partir de la multiplication de trois
sinus unitaires (1. sin(cot),1. sin(cot
- 2n-/3),1. sin(cot + 2n-/3)) par la valeur crête de courant
de référence de la source Imax. Les trois
sinus unitaires sont obtenus à partir de la division de trois tensions
de la génératrice par leur amplitude
Vgmax. A partir de la
méthode de détecteur de crête, Vsmax
est obtenue à l'aide de cette équation :
z
Vgmax = 3 (Vga z + ~gb
z + vgcz )
(IV.19)
Les trois courants de références seront
comparés aux courants iga,
igbet igc. L'erreur obtenue
passe sur un comparateur à hystérésis pour fournir les
ordres de commutations des interrupteurs du convertisseur à
MLI.
En effet, cette méthode de détecteur de
crête exige que la tension à la sortie de la
génératrice quelle soit saine (sinusoïdale et
équilibrée), sinon l'utilisation de la boucle à
verrouillage de phase (phase-locked-loop PLL) est indispensable pour
la synthèse des trois sinus unitaires [KEND12]. Dans notre travail, on
s'arrange à ce que les tensions générer par le groupe
électrogène soit sinusoïdale et équilibrée. La
détermination des courants de référence sinusoïdaux
nécessite une régulation de la tension du bus comme le montre la
figure IV.10.
Page 44
Chapitre IV : Techniques de commande d'un
Véhicule Hybride Série
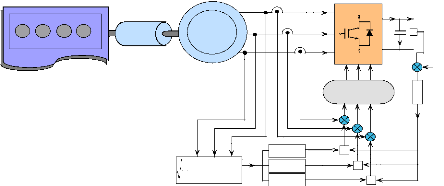
Moteur
thermique
Réducteur
2 2
( + v 2 2
v gb + v
gc
ga
3
v ga
GE
vgb
vgc
)
Vsm
vgc /Vg
vgb /Vg
vga /Vgmax
igb igc
max
max
iga
iga
igb
igc
Commande MLI
ia*
X
ib *
X
ic *
X
Is Ich
C
ic
Vbus
P
I
Imax*
Vbus*
Figure IV.10 : Schéma de contrôle du
convertisseur MLI a) Boucle de régulation de la tension
Le rôle de la boucle de régulation de la
tension du bus continu est de maintenir cette tension à une valeur de
référence constante, en contrôlant le processus de
chargement et de déchargement du condensateur, un contrôleur PI
est utilisé pour régulé cette tension, il est
définit par la formule suivante :
·
G(s) = Kp + S`
(IV.20)
En négligeant les pertes actives dans le
convertisseur et dans les inductances de couplage, l'application du principe de
conservation de la puissance donne la relation entre la puissance active
débitée par le système éolien et celle reçue
à la sortie du pont. Elle s'écrit sous la forme suivante
:
Pg = Pbus
(IV.21)
#
VbusIDc = d2 . Vg. Imax
(IV.22)
IDC = LC + Ich
(IV.23)
Avec :
dt p(LC = C. dVbus
IV.24)
Vbus
Ich =
Rch
Chapitre IV : Techniques de commande d'un
Véhicule Hybride Série
Ainsi, la structure du système en boucle
fermée est représentée :

3. V g 2Vbus
Imax
IDC
+
-
_
1 C.s
Vbus* +
Vbus
Ich
Figure IV.11 : Modèle en boucle fermé de
la boucle de tension du bus continu La fonction de transfert en boucle
fermée du système est :
P.
Wn2S2+WnS.+1
F(s) = 1+K S
(IV.25)
Page 45
Donc :
con
KL = 2C wxy
3q con, Kp = 2.T
(IV.26)
II.5. Application de la technique intelligente sur la
commande de la MSAP
La théorie de la logique flou a été
mise au point durant les années soixante par le professeur Lotfi ZADEH.
Elle reproduit des modes de raisonnement humain et son domaine d'application
est très vaste. [CHIK08]
Les régulateurs flous utilisent
généralement une expertise exprimée sous forme
règles. La forme générique pour un régulateur
à deux entrées et une sortie est la suivante :
Si {x1est A1et x2 est
A2} alors{y est B} (IV.27)
II.5.1. Commande vectorielle avec régulateur PI
flou de vitesse
Cette partie établit un régulateur flou PI
de vitesse, qui applique les principes et la méthode de la logique flou
pour ajuster le coefficient proportionnel
Kp et le coefficient intégral
Ki du régulateur PI à chaque
instant.
II.5.1.1. Conception du régulateur
flou
Dans le cas de la régulation de vitesse, on
utilise habituellement l'erreur e = co; - cd, et la
variation de l'erreur De et parfois
l'intégration d'erreur.
Chapitre IV : Techniques de commande d'un
Véhicule Hybride Série
...
9(†) = ;2*(†) - ;2~†~
(IV.28)
?9(†) = 9(†) - 9(† - 1)
La sortie du régulateur de vitesse est la
valeur du courant de référence -+* dans le
schéma de la commande vectorielle de la machine synchrone. On peut
écrire :
-+* = L‡àà(9, ?9)
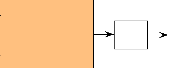
Controle
flou
I*
q
ki f
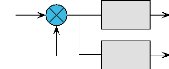
+ e
-
?e
Gain de réglage
Gain de réglage
(Oe *
(Oe
Page 46
Figure IV.12 : Schéma principe d'un
contrôleur flou de type PI
On remarque que cette structure de commande floue de
type PI figure (IV.12) est en fait une association en série d'un
contrôleur flou de base réalisé avec le bloc Fuzzy
Logic Control sous Matlab/Toolbox et d'une structure d'un
régulateur de type PI.
Comme les fonctions d'appartenance sont
normalisées entre [-1,1], les variables sont multipliées avec des
gains de réglages. La structure interne de ce régulateur flou est
représentée dans le diagramme fonctionnel suivant :
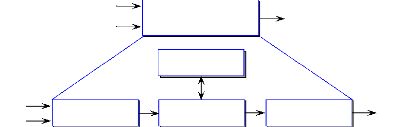
e
Régulateur
flou
?e
?iq
Fuzzyfication
Inférence
Règles
Défuzzyfication
e ?e
?iq
Figure IV.13 : Structure interne d'un régulateur
flou
Où trois blocs appelés fuzzification,
inférence et défuzzification sont utilisés et dont la
fonctionnalité est décrite dans ce qui suit.
a) Interface de fuzzification
C'est une opération qui consiste à
transformer les données numériques d'un phénomène
à des valeurs linguistiques sur un domaine normalisé qui facilite
le calcul. A partir de ces domaines
Page 47
Chapitre IV : Techniques de commande d'un
Véhicule Hybride Série
numériques appelés univers de discours
et pour chaque grandeur d'entrée où de sortie, on peut calculer
les degrés d'appartenance aux sous-ensembles flous de la variable
linguistique correspondant. [MINH97]
Dans notre cas, les fonctions d'appartenance des
variables d'entrée et de sortie sont illustrées par la figure
(IV.14)
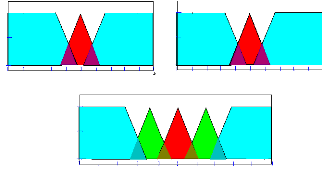
i *
q
Fuzzy
variable
N EZ P
1 .0
0.5
0
N EZ P
- 1 .0 - 0.8 - 0.6
- 0.4 -0.2 0 0.2 0.4 0 .6 0.8 1
- 1 . 0 - 0.8 - 0.6
- 0.4 - 0.2 0 0 .2 0.4 0.6 0.8 1
Fuzzy variable e Fuzzy variable
?e
NG NM EZ PM PG
1 .0
0.5
0
- 1 . 0 -0.8 - 0.6
- 0.4 - 0.2 0 0.2 0.4 0.6 0 .8 1
.0
1 .0
0 .5
0
Figure IV.14 : Fonction d'appartenance des variables
d'entrées et sortie
b) Mécanisme d'inférence floue
Les règles floues, qui permettent de
déterminer le signal de sortie du régulateur en fonction des
signaux d'entrées, sont déduites à partir de la table de
MacVicar (tableau IV.1). Ainsi, on obtient la table d'inférence suivante
:
Tableau IV.1 : Table
d'inférence
e
?e
|
N
|
EZ
|
P
|
N
|
NG
|
NM
|
EZ
|
EZ
|
NM
|
EZ
|
PM
|
P
|
EZ
|
PM
|
PG
|
|
Les valeurs linguistiques : NG : Négatif
Grand, NM : Négatif Moyen, N : Négatif, ZE : Zéro (nulle),
P : Positif, PM : Positif Moyen et PG : Positif Grand.
Dans le tableau (IV.1), chaque élément
formalise une règle comme, par exemple : Si (e (k) est NM) et
(Le (k) est ZE), alors (dI (k) est NM).
Page 48
Chapitre IV : Techniques de commande d'un
Véhicule Hybride Série
Une condition précédée du
symbole `SI` appelée prémisse, et d'une conclusion (action,
décision, opération où commande)
précédée du symbole `alors'.
Cet ensemble de règle regroupe toutes les
situations possibles du system évaluées par les
différentes valeurs attribuées à 9 et
à sa variation ?9 et toutes les valeurs correspondantes
de la variation de la commande *+*.
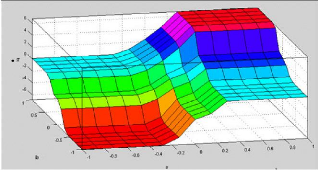
i
q
*
?e
e
Figure IV.15 : Surface de la fonction d'appartenance
*+* = f‡àà(9, ?9)
L'évaluation des gains proportionnels provient de
l'expérience, pour le gain 42, par exemple
on peut commencer avec un facteur qui dépend de l'erreur maximale.
Effectivement ces valeurs font partie de la procédure
d'évaluation par simulation.
c) Interface de défuzzification
Comme le système à asservir ne peut
accepter que une commande définie et nette, cette fonction
d'appartenance doit être traduite en une commande non floue, nette et
précise. Ce processus est connu sous le nom de
défuzzification.
Ils existent plusieurs méthodes de
défuzzification dans la littérature dont une méthode qui
est le plus souvent plus efficace que les autres, celle de la
défuzzification par centre de gravité.
La défuzzification par centre de gravité :
Cette méthode calcule la loi de commande non floue -+*
en tant que l'abscisse du centre de gravité la fonction
d'appartenance de la loi de
commande -\2S?*+'.
P
™ D oe`[b?'D.,' ùP
*+ * = ~IV.29~
P
™ oe`[b?'D.,' ùP
Page 49
Chapitre IV : Techniques de commande d'un Véhicule Hybride
Série
III. Système de gestion d'énergie du
modèle du véhicule III.1. Présentation
Le problème majeur dans l'architecture que
nous avons choisis est d'avoir un rendement de la chaine global faible par
rapport aux autres architectures. Ce rendement faible est dut certainement
à la disposition série des éléments de la chaine de
traction. L'objectif de ce système est de minimisé les pertes
dans la chaine globale.
L'utilisation de la batterie comme source
d'énergie électrique nous donne le choix de définir deux
modes de contrôle :
· Mode de contrôle avec maintien de
charge
Dans ce mode de contrôle [PISU05], la charge du
moteur thermique essaye de suivre la charge du moteur électrique. Cette
stratégie n'améliore pas vraiment le rendement global mais elle
augmente la durée de vie de la batterie.
· Mode de contrôle avec épuisement de
charge
Par contre dans celui-ci, le moteur thermique est
éteint jusqu'à ce que la batterie atteigne un niveau bas de
charge [ANDR11]. Une fois que ce niveau est atteint, il sera allumé pour
arriver à un niveau de charge élevé. L'avantage de ce mode
de contrôle est qu'il permet au moteur thermique de fonctionner à
un seul point de fonctionnement, le plus efficace. Ceci améliore
considérablement son rendement d'où le rendement
global.
Cependant, on remarque des grandes pertes de charge
de la batterie dues au taux de recharge/décharge élevés.
En outre, la durée de vie de la batterie diminue à cause de cette
utilisation agressive.
Notons pour conclure, nous allons prendre comme choix
le deuxième type de contrôle, puisque l'un de nos objectifs est
inclus dans celui-ci.
III.2. Technique de contrôle avec State-flow
State-flow est un outil de conception graphique
interactif qui fonctionne avec Matlab/Simulink pour modéliser et simuler
des systèmes pilotés par les événements.
Event-Driven : transition des systèmes d'un mode de fonctionnement
à un autre en réponse à des événements et
des conditions. Ces systèmes sont souvent utilisés à la
logique de modèle pour contrôler dynamiquement un
périphérique physique tel qu'un ventilateur où un moteur.
Ces
Page 50
Chapitre IV : Techniques de commande d'un Véhicule Hybride
Série
systèmes peuvent être
modélisés comme des machines à états finis. Par
exemple, un ventilateur de maison peut avoir des états tels que la
haute, moyenne, basse et éteint. Ce système de contrôle
nous conviendrait énormément d'après cet exemple pour le
contrôle de notre modèle. Et pour construire des machines à
états finis, State-flow fournit des objets graphiques que vous pouvez
déposer à partir d'une palette de conception pour créer
des graphiques dans lesquels une série de transitions dirige un flux de
la logique d'un état à un autre. State-flow vous permet
également d'ajouter des entrées et des data-Events de sortie
(transition par front) pour déclencher State-flow graphiques actions et
conditions, vous pouvez attacher à états et les transitions afin
de mieux définir le comportement de l'organigramme State-flow.
[MATH13]
La gestion de l'énergie entre différent
organe du véhicule est réalisée par State-flow. Ce
contrôle permet de manoeuvrer le transit de puissance dans la chaine de
traction (figure IV.16). Donc, on peut développé une unité
de contrôle qui transite dans le bus continu notant qu'un filtre
passe-bas doit être dimensionné pour éliminer le bruit
présent dans les mesures pour avoir un contrôle
stable.
Dans le cadre de ce projet, seulement quelques
paramètres ont été pris en considération dans le
système de contrôle des flux d'énergie des trois moteurs.
L'utilisation des différents moteurs dans ce projet est fonction des
paramètres suivants :
· la vitesse actuelle du véhicule
;
· la position de la pédale de frein
;
· état de charge de la batterie
;
En réalité, beaucoup d'autres facteurs
peuvent être pris en compte tel que la position de la boîte de
vitesses. Cependant, prendre en compte ces paramètres, compliquerait
beaucoup la stratégie de commande. De plus, ils ne sont pas
nécessaires pour montrer le comportement du système dans son
ensemble.
Page 51
Chapitre IV : Techniques de commande d'un Véhicule Hybride
Série
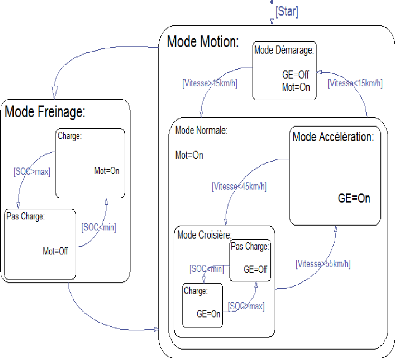
Figure IV.16 Diagramme de contrôle
d'énergie
Les fonctionnalités selon et les contraintes
sur les organes de la chaine de traction du véhicule hybride sont
surveillées par ce diagramme (figure IV.16), comme telles :
> Limitation de la charge sur la batterie à un
certain seuil min-max selon le SOC ;
> Servir le moteur électrique par une puissance
suffisante selon les différents modes ;
> Récupération d'énergie au mode
freinage ;
> Lorsque la batterie a atteint sa limite maximum, la
puissance récupérée par le freinage
sera dissiper dans une résistance de dissipation
installé en parallèle de la batterie ;
Ce diagramme doit rependre à toute les phases
de fonctionnement d'un VH série déjà souligner dans le
chapitre I.
Page 52
Chapitre IV : Techniques de commande d'un Véhicule Hybride
Série
IV. Résultats de simulation et validation des
commandes
IV.1. Introduction
Le modèle est testé sur un cycle de 10
secondes pendant lequel tous les modes de fonctionnement sont couverts,
à savoir le démarrage, la conduite normale, le cas d'une forte
accélération, le freinage et la recharge de la batterie. Les
résultats montrés pour chacun de ces modes mettent en
évidence les transferts de puissance entre les différents
sous-systèmes et particulièrement entre la batterie, la
génératrice et le moteur électrique. Avant ça, des
résultats qui permettent de valider les commandes appropriées
à chacun des systèmes qui constituent le modèle seront
présentés.
IV.2. Schéma global simulé
La figure IV.17 présente le circuit de
puissance réalisé avec Psim, il regroupe le système global
d'un véhicule hybride série dans son ensemble : groupe
électrogène, batterie et moteur électrique de traction. La
commande du hacheur été réaliser sur Psim pour des raisons
de régulation.
La figure IV.18 donne le circuit de commande
réalisé avec Matlab/Simulink, qui est couplé au circuit de
puissance à l'aide d'un composant appelé SimCoupler disponible
sur librairie Simulink. Un composant appelé mémoire devrait
être rajouté à chaque grandeur sortant de SimCoupler pour
mémoriser la grandeur ce qui permet d'accélérer le temps
de simulation.
La batterie utilisée est celle de Psim, mais
celle-ci ce comporte comme une source d'énergie parfaite, pour cette
raison nous avons rajouté la batterie du Matlab à qui nous avons
injecté le courant transitant dans la self pour observé la charge
et décharge de la batterie, en particulier l'évolution de
l'état de charge (SOC).
Un système électrique, similaire
à la fonction d'un embrayage, été rajouté pour
coupler le groupe électrogène avec le reste du système,
après que celui-ci atteindrait le régime voulu.
Page 53
Chapitre IV : Techniques de commande d'un Véhicule Hybride
Série
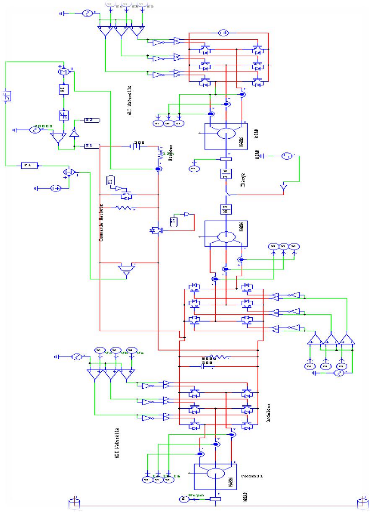
|
Figure IV.17
|
: Circuit de puissance réalisé avec
logiciel Psim
|
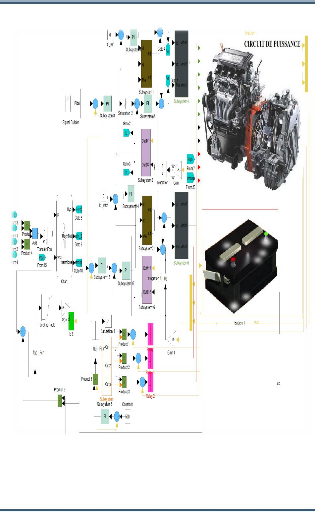
Figure IV. 18: Circuit de commande réalisé
avec logiciel Matlab/Simulink
Page 54
Chapitre IV : Techniques de commande d'un Véhicule Hybride
Série
Chapitre IV : Techniques de commande d'un Véhicule Hybride
Série
IV.3. Validation des stratégies de commande
IV.3.1. Validation des commandes liées à
la machine de traction et au système de stockage d'énergie
Chaque système doit rependre aux exigences de
chaque commande qui lui ont été appropriée. La
référence étant un échelon de vitesse fixé
à 1000 tr/mn jusqu'à 2 secondes puis subir une rampe descendante
jusqu'à 3 secondes. Le temps de simulation est réglé
à 3 secondes avec un pas de 1 us.
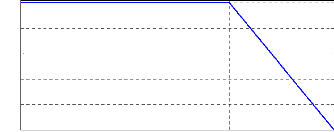
vitesse de référence (tr/mn)
1000
900
800
600
700
500
0 0.5 1 1.5 2 2.5 3
t (s)
Figure IV.19 : Référence de vitesse
imposée à la machine de traction
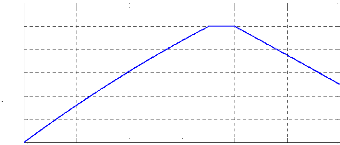
vitesse ( tr/m n)
1200
1000
400
800
600
200
0
Page 55
0 0.5 1 1.5 2 2.5 3
Figure IV.20 : Vitesse mesurée du moteur
électrique avec PI comme régulateur
La figure (IV.19) étant la
référence de vitesse imposée au système de
traction, la machine de traction atteint cette vitesse au bout de 1.7 secondes
avec un temps de repense de 1.5 seconde. L'erreur de vitesse étant
égale à zéro selon la figure (IV.20) et le système
est parfaitement réguler. Comme on peut le constater ainsi, la vitesse
de la machine évolue d'une façon linéaire avec ce type de
régulateur. Comme prévus, il ne y'a aucune oscillation dans le
système et le régime est critique.
Chapitre IV : Techniques de commande d'un Véhicule Hybride
Série
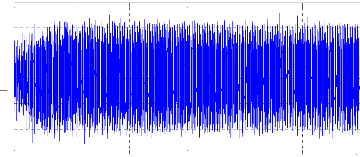
id (A)
-0.5
-1.5
0.5
1.5
-1
0
1
Page 56
0 0.5 1 1.5 2 2.5 3
t (s)
Figure IV.21 : Courant 1d de
la motorisation électrique de traction
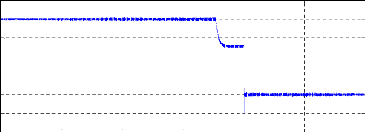
150
100
50
courant iq (A)
Ce (N.m)
0
-50
-100
-150
-2000 0.5 1 1.5 2 2.5 3
t(s)
Figure IV.22 : Courant 1q de
la motorisation électrique de traction
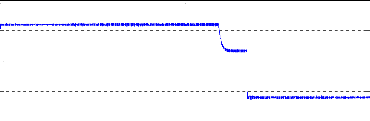
100
50
0
-50
-100 0 0.5 1 1.5 2 2.5 3
t (s)
Figure IV.23 : Couple
Ce de la motorisation électrique de
traction
Les figures (IV.21 et IV.22) présentent le
courant direct et en quadrature de la machine de traction. Comme la commande
l'exige, le courant direct est fixé à zéro et le couple
électromagnétique observé dans la figure IV.23 est l'image
du courant en quadrature.
Chapitre IV : Techniques de commande d'un Véhicule Hybride
Série
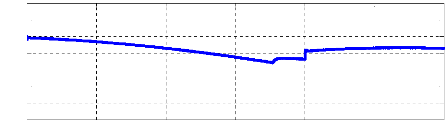
Vb (V)
230
229
228
226
225
22
224
227
3 0
0.5 1 1.5 2 2.5 3
t(s)
Figure IV.24 : Tension à la sortie de la
batterie
La figure IV.24 montre que la batterie subi une charge
où une décharge, selon le mode de fonctionnement. Comme elle subi
aussi des chutes de tension en fonction du courant absorbé.
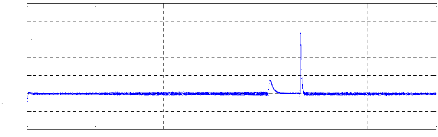
tension de bus continu (V)
500
490
48
550
530
520
540
510
0 0
0.5 1 1.5 2 2.5 3
Page 57
t (s)
Figure IV.25 : Tension du bus continu
La figure IV.25 présente l'allure de la tension
au niveau du bus continu. Cette tension est maintenue à 500V par le
hacheur, d'un temps de repense de 0.05s. Des dépassements qui
excèdent les 10% sont prévisibles, de faite d'imposer un temps de
repense très petit pour le hacheur.
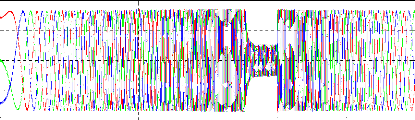
100
Courant statorique (A)
50
0
-50
-100 0 0.5 1 1.5 2 2.5 3
t(s)
Figure IV.26 : Courants statoriques de la machine
électrique de traction
Chapitre IV : Techniques de commande d'un Véhicule Hybride
Série
Courant statorique (A)
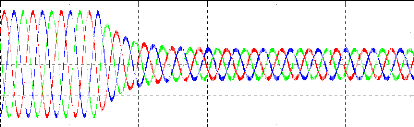
100 50 0 -50
-1001.7 1.75 1.8 1.85 1.9 1.95 2
Figure IV.27 : Zoom sur les courants statoriques de la
machine de traction
Les courants statoriques, de la machine de traction,
sont présentés par la figure IV.26 et un zoom lorsque la vitesse
de la machine se stabilise par la figure IV.27. Notons que la fréquence
des courants évolue avec le profile de la vitesse. On peut admettre
aussi que les allures des courants sont saines.
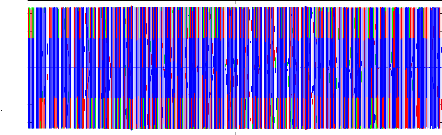
tensions à la sortie de l'onduleur (V)
-100
-200
-300
200
300
100
0
0 0.5 1 1.5 2 2.5
t (s)
Figure IV.28 : Tensions statoriques de la machine de
traction
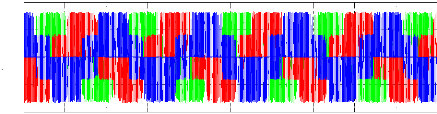
vabc (V)
-200
-400
400
200
0
Page 58
1.5 1.51 1.52 1.53 1.54 1.55 1.56 1.57 1.58 1.59
1.6
t (s)
Figure IV.29 : Zoom sur l'allure des tensions
statorique de la machine de traction
Chapitre IV : Techniques de commande d'un
Véhicule Hybride Série
Les figures (IV.28 et IV.29) présentent les
tensions à la sorties des bras de l'onduleur qui
alimente la machine
de traction. Ces résultats confirment que la technique MLI
Intersective
est satisfaisante pour la commande de l'onduleur.
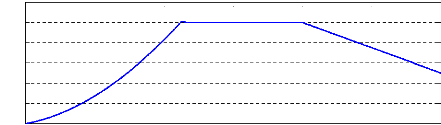
vitesse (tr/mn)
1200
1000
400
800
600
200
0
Page 59
0 0.5 1 1.5 2 2.5 3
t (s)
Figure IV.30 : Vitesse de la machine de traction avec
régulateur PI flou
La vitesse de référence est similaire
à celle donnée dans la figure IV.19, mais cette fois-ci le
régulateur de vitesse de la machine de traction été
remplacé par un régulateur non linéaire (PI flou), on peut
même distinguer la non-linéarité sur la figure (IV.30).
C'est clair que le temps de repense soit plus court avec un régulateur
PI flou que son homologue PI classique puisqu'il est classé parmi les
régulateurs robustes.
IV.3.2. Validation de la commande de groupe
électrogène
Dans cette partie, nous allons expliquer le
fonctionnement de groupe électrogène. Ainsi le contrôle
develloper avec l'effectuation d'un un test sur une charge résistive
qu'on va varié durant la simulation.
Au début, nous avons inséré une
charge de 13 kW. Après 0.2s de simulation, nous avons augmenté la
charge à 50 kW.
vitesse génératrice (tr/mn)
1000
1200
400
200
800
600
0
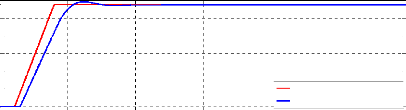
Référence (tr/mn)
Vitesse de la génératrice (tr/mn)
0 0.5 1 1.5 2 2.5 3
t ( )
Figure IV.31 : Référence
généré et vitesse de la
génératrice
Chapitre IV : Techniques de commande d'un Véhicule Hybride
Série
La figure IV.31 montre qu'une référence
a été fournie à la génératrice après
avoir augmenter la charge. La génératrice suit cette
référence et elles se stabilisent à une valeur de 1150
tr/mn.
25
20
15
10
5
courant de redresseur (A)
0
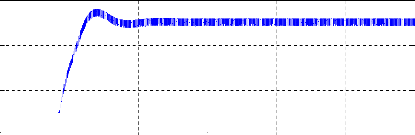
-5 0
0.5 1 1.5 2 2.5 3
t (s)
Figure IV.32 : Courant fournis par la
génératrice au bus continu
La figure IV.32 montre que le courant de la
génératrice redressé prend un certain retard de 0.2 s pour
être générer par rapport à la
référence, cela est dû au temps de réponse du
redresseur à MLI qui est égale à 0.2s. Nous admettons que
le courant de la génératrice est bruité à cause des
harmoniques générer par le redresseur.
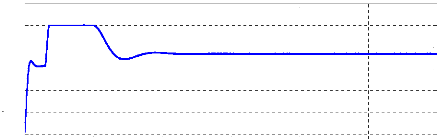
Courant de la batterie (A)
100
120
20
80
60
40
0
Page 60
0 0.5 1 1.5 2 2.5 3
t (s)
Figure IV.33 : Courant fournit par la
batterie
Dans cette figure IV.33, nous observons mieux le
principe d'où nous avons eu l'idée de développer ce
modèle. Entre 0 s et 0.2 s, la batterie fournis la puissance
nécessaire pour que la tension dans le bus continu soit stabilisé
à 500V, ce temps qui correspond a la charge de 20kW. Mais, dès
que nous avons augmenté la charge à 50 kW, la batterie ne peut
plus fournir la puissance nécessaire a cause de la saturation du courant
qui limite le courant à 100 A (la puissance à 20kW). Ce qui va
permettre de fournir une erreur de tension sur le bus continu qui va activer le
redresseur à MLI autrement-dis le groupe
électrogène.
Page 61
Chapitre IV : Techniques de commande d'un Véhicule Hybride
Série
Tension de bus continu (V)
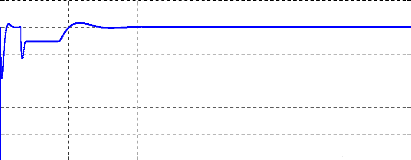
600 500 400 300 200 100
0 0 0.5 1 1.5 2 2.5 3
t (s)
Figure IV.34 : Tension de bus continu durant le
test
Comme nous le remarquons sur la figure IV.34 que le
hacheur Boost n'arrive plus à fixé la tension de bus
continu à 500 V lorsque y'avait une augmentation de la charge à
50 kW jusqu'à ce que le groupe électrogène ce mis en
marche pour fournir la puissance manquante.
IV.3.4. Validation du modèle globale du
véhicule série réalisé durant un cycle
t (s)
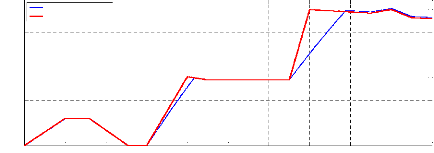
vitesse (tr/mn)
3000
2000
2500
1000
1500
500
0 0 1 2 3 4 5 6 7 8 9 10
vitesse mesurée (tr/mn) vitesse de référence
(tr/mn)
Figure IV.35 : Cycle de conduite proposé et la
poursuite de la machine de traction en vitesse
Ce cycle de vitesse fusionne les phases de
fonctionnement énoncées dans le chapitre I et la réponse
en vitesse de la machine de traction. Ce qu'on peut distinguer dans cette
figure (IV.35) est que le temps de réponse de la machine de traction
augmente au fur et à mesure que la consigne appliqué est
très grande, cela est explique de faite d'avoir mit une limitation dans
la commande pour que le couple électromagnétique ne
dépasse pas la valeur nominale.
Chapitre IV : Techniques de commande d'un Véhicule Hybride
Série
|
Ce (N.m)
|
150
100
50
0
-50
|
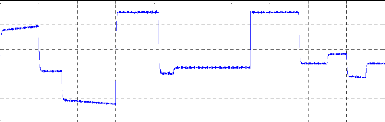
-10
00
1 2 3 4 5 6 7 8 9 10
t (s)
Figure IV.36 : Le couple développé par la
machine de traction durant le cycle
La figure (IV.36) présente le couple
développé par la machine de traction le long du cycle
parcouru.
vitesse de la génératrice
(tr/mn)
3000
2500
2000
1500
1000
500
0
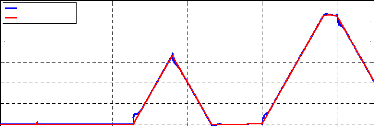
vitesse mesurée (tr/mn) vitesse réference
(tr/mn)
0 1 2 3 4 5 6 7 8 9 10
t (s)
Figure IV.37 : Vitesse de la génératrice
et sa référence imposée par la commande
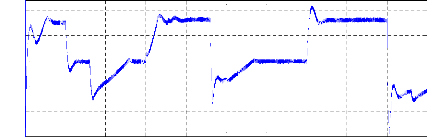
courant de la batterie (A)
-100
-150
-50
100
50
0
Page 62
0 1 2 3 4 5 6 7 8 9 10
t (s)
Figure IV.38 : Courant transcrit dans la batterie
durant de cycle
Chapitre IV : Techniques de commande d'un Véhicule Hybride
Série
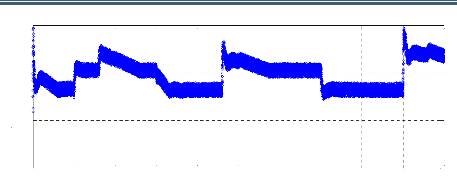
200
tension de la batterie (V)
150
100
50
0 1 2 3 4 5 6 7 8 9 10
t (s)
Figure IV.39 : Tension sur les bornes de la batterie
durant le cycle
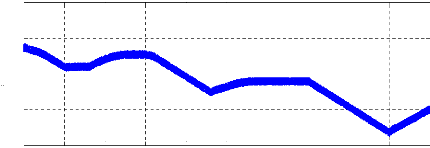
SOC (%)
41.8
41.6
41.4
41.2
41
0 1 2 3 4 5 6 7 8 9 10
t (s)
Figure IV.40 : Evolution de SOC durant le
cycle
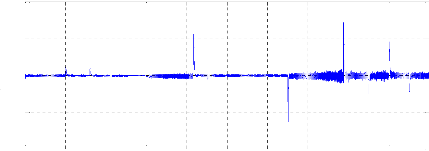
Vbus (V)
480
460
540
520
500
Page 63
0 1 2 3 4 5 6 7 8 9 10
t (s)
Figure IV.41 : Tension sur le bus continu durant le
cycle
Chapitre IV : Techniques de commande d'un
Véhicule Hybride Série
IV.3.3. Bilan des puissances
Pour chacun des modes de fonctionnement, le bilan des
puissances des différents organes du système doit être
respecté. Ce bilan doit valider l'équation (IV.30) durant toute
la simulation. Cette équation stipule que la puissance en entrée
du moteur électrique est égale à celle
délivrée par la génératrice plus celle fournie par
la batterie.
Pmoteur = Pgénératrice + Pbatterie
(IV.30)
Les figures (IV.42, IV.43 et IV.44) montrent ces
différentes puissances. On peut se rendre compte à partir des
figures, durant tout le cycle de simulation, la puissance du moteur
électrique est l'addition des deux autres puissances. Les courbes se
superposant parfaitement, 1'équation (IV.33) est alors
vérifiée.
4
|
4 2 0 -2
|
x 10
|
|
Puissance du moteur électrique (Watt)
|
|
0 1 2 3 4 5 6 7 8 9 10
t (s)
Figure IV.42 : Puissance en entrée et en sortie
du moteur électrique de traction
4
x 10
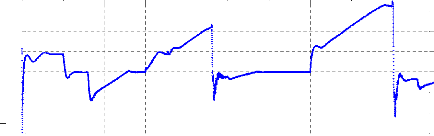
Puissance de la génératrice
(Watt)
- 1
- 2
- 3
2
0
3
1
Page 64
0 1 2 3 4 5 6 7 8 9 10
t (s)
Figure IV.43 : Puissance délivrée par la
génératrice
Chapitre IV : Techniques de commande d'un Véhicule Hybride
Série
4
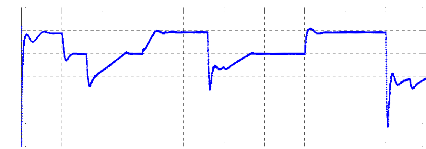
puissance de la batterie (Watt)
-1
-2
-3
-4
2 x 10
0
1
Page 65
0 1 2 3 4 5 6 7 8 9 10
t (s)
Figure IV.44 : Bilan de puissance lors de
recharge/décharge de la batterie
On peut distinguer les quatre phases de fonctionnement
décrites dans le chapitre I durant le cycle de conduite proposé,
et le comportement de chaque élément suivant le contrôle
donner dans la figure IV.16.
La phase de départ et à basse vitesse
est observée entre 0 s et 3.5 s. Durant cette période, le
véhicule est mû uniquement par le couple lié à la
puissance délivrée par la batterie, le groupe
électrogène au repos.
Phase de condition normale compris entre 3.5 s et 6 s,
il y'à demande d'un surplus de puissance, une référence
pour la génératrice est généré à 3.6
s.
La durée entre 7 s et 9 s correspond à
la phase de forte accélération (plain puissance), tous les
éléments du système de traction son en jeu, la puissance
fournie par la batterie s'additionne à la puissance de la
génératrice pour alimenter la machine de traction. Après
la 9ième seconde, il y'à
diminution de la vitesse, la batterie lâche prise. La
référence pour la génératrice est toujours fournie
pour alimenté le moteur de traction et recharger la
batterie.
La recharge de la batterie autrement-dit, la phase
freinage, est observée lorsqu'il y'à diminution de la vitesse
comme entre 1.6 s et 2.6 s, aussi entre 4.7 s et 5.7 s.
Le SOC évolue selon la charge où la
décharge de la batterie (figure IV.40). Le SOC nous donne une meilleure
idée sur l'état de charge de la batterie que de mesuré sa
tension de sortie, puisque celle-ci est erronée par la chute de tension
présente dans la résistance interne de la batterie.
Page 66
Chapitre IV : Techniques de commande d'un Véhicule Hybride
Série
V. Conclusion
Dans la suite de ce chapitre, on a utilise le
modèle de la machine électrique MSAP choisi dans le chapitre
précédant pour définir une stratégie de commande
vectorielle qui permet le découplage du système de la machine. La
modélisation du moteur synchrone à aimants permanents dans le
référentiel (dq) nous a été très
bénéfique.
Le choix des PI pour la régulation
été très conformes, taud que les paramètres du
système à réguler sont connus. Pour la régulation
de la vitesse, un régulateur intelligent non-linéaire
été proposé. Ce dernier offre une bonne robustesse en
termes de rapidité et de précision.
Trois techniques de commande ont été
appropriées pour chacun des convertisseurs. La commande CMC pour le
hacheur permet aussi l'accès au courant de la batterie et limité
son module à une valeur maximale pour protéger la batterie d'un
fort courant.
Un mode de contrôle des sous-systèmes
selon les phases de fonctionnement été proposé. Ce mode de
contrôle a pour objectif de déterminer, selon la vitesse du
véhicule, le transit d'énergie dans la chaine de traction. Ceci
vise à augmenter le rendement énergétique du
véhicule. La détection du mode hybride permet de faire
fonctionner le moteur à combustion où non, selon la puissance
requise par le moteur de traction.
A la fin, une simulation sur une durée de 10
secondes, permettant de couvrir les différents modes de fonctionnement,
a été effectuée. Les résultats ont montré
que le comportement du système hybride série était
respecté et notamment que les écoulements de puissance entre
chacun des différents sous systèmes étaient conformes aux
prévisions selon la phase de fonctionnement parcourue.
REFERENCES
A
[AMAR01] Y. AMARA, « Contribution à la
Conception et à la Commande des Machines Synchrones à Double
Excitation : Application au Véhicule Hybride », Thèse de
doctorat, Université, Paris XI, 2001.
[ANDR11] A. ANDREAS, « Stochastic Optimal Control
for Series Hybrid Electric Vehicles », Article, US Department of Energy,
USA, 2011
B
[BOUQ08] D. BOUQUAIN, « Contribution à la
modélisation et à l'optimisation des architecture de
véhicule hybride », Thèse doctorat, Université de
Technologie de Belfort-Montbéliard, France, 2008.
[BERE05] J. BERETTA, « Le génie
électrique automobile, la traction électrique »,
H.
Science, Edition LAVOISIER, France, 2005.
[BADI97] F. BADIN. « Contribution à la
modélisation des transmissions hybrides
thermiques électriques séries.
Réalisation d'un bilan énergie-pollution en usage
réel, » Thèse de doctorat de
l'Université de Savoie, France, 1997.
C
[CHAN01] C. C. CHAN, K. T. CHAU, « Modern
Electric Vehicle Technology », Oxford U.K, Oxford University, USA,
2001.
[CALLA01] L. CALLAGHAN, S. LYNCH, T. BALON, «
Hybrid-Electric Drive Transit Bus Chassis and Engine Emission Evaluation
Programs, Electric Vehicle » Symposium EVS 18, Berlin, Germany,
2001.
[CAPI02] S. L. CAPITANEANU, « Optimisation de la
fonction MLI d'un onduleur de
tension deux-niveaux », Thèse de doctorat,
Institut National Polytechnique de Toulouse, France, 2002.
[CHIK08] A. CHIKHI, « Commande Directe du Couple
du Moteur Asynchrone-Apport de la Logique Floue», Mémoire de
Magister, Université de Batna, Algérie, 2008.
F
[FUHS09] A. FUHS, « Hybrid Vehicles and the Future
of Personal Transportation »,
Édition CRC Press, USA, 2009.
[FORU13] Site:
http://www.forum-auto.com/marques/opel/sujet244-70.htm
G
[GUEN11] S. F. GUENUDI. « Modélisation,
Commande et Gestion de l'Energie d'un Véhicule Electrique Hybride
». Mémoire de Magister, Ecole National Polytechnique, Alger,
Algérie.
[GUIL08] A. GUILLAUME. « Comparaison de Concepts de
Moteur Diesel en Vue de
leur Hybridation : Bilan des émissions de CO2
suivant l'usage en véhicule ». Thèse de doctorat, Ecole
Centrale de Lyon, France, 2008
H
[HOEL03] D. HOELSCHER, M. EHSANI and others, «
Impact of hybrid electric Vehicles on the world's petroleum consumption and
supply », Society of Automotive Engineers (SAE) Future Transportation
Technology Conference, Paper No.2003-01-2310, 2003.
[HUSA03] I. HUSAIN, « Electric and hybrid
vehicles ». CRC PRESS Boca Raton London New York Washington D.C, USA,
2003.
[HIJA10] A. HIJAZI. « Modélisation
électrothermique, commande et dimensionnement
d'un système de stockage d'énergie par
super-condensateurs avec prise en compte de son vieillissement ».
Thèse de doctorat. Ecole Doctorale Electrique, Electrotechnique,
Automatique de Lyon, France, 2010.
J
[JANI12] N. JANIAUD. « Modélisation du
système de puissance du Véhicule Éclectique
en régime transitoire en vue de l'optimisation
de l'autonomie, des performances et des couts associes ». Thèse de
Doctorat. Université Paris Sud, France, 2012.
K
[KHAL10] N. KHALIL. «Stratégie de commande
et techniques intelligentes appliquées aux machines de type synchrone
». Mémoire de Magister. Université MENTOURI Constantine,
Algérie, 2010.
[KERM09] S. KERMANI. « Gestion Energétique
des Véhicules Hybrides : de la Simulation à la Commande Temps
Réel ». Thèse de Doctorat, Université de Valenciennes
et du Hainaut Cambrésis, France, 2009.
[EHSA05] M. EHSANI, Y. GAO, S. Gay, A. EMADI, «
Modern Electric, Hybrid Electric and Fuel Cell Vehicles-Fundamentals Theory and
Design ». Édition CRC Press, USA, 2005
[KELLY06] K. J. KELLY, M. MIHALIC, M. ZOLOT, «
Battery usage and thermal performance of the Toyota Prius and Honda Insight
during chassis dynamometer testing », Battery Conference on Applications
and Advances. Long Beach, U.S.A., 2002.
[KEND12] F. KENDOULI, « Centrale Eolienne et
Qualité de l'Energie Electrique », Thèse de Doctorat,
Université de MENTOURI, Constantine, Algérie, 2012.
L
[LHOM07] W. LHOMME. « Gestion d'Énergie de
Véhicules Électrique Hybrides Basées sur la
Représentation Énergétique Macroscopique »,
Thèse de doctorat en Génie Électrique, Université
des Sciences et Technologies de Lille, France, 2007.
[LABR09] F. LABRIQUE, S. GUSIA «
Modélisation des systèmes électroniques de puissance
à commande MLI», Université catholique de Louvain, France,
2009.
M
[MEST07] V. MESTER. « Conception Optimale
Systématique des Composants des Chaines de Traction Electrique ».
Thèse de Doctorat. Ecole Centrale de Lille, France, 2007.
[MINH97] T. C. MINH, « Commande Numérique
de Machines Asynchrone par Logique Flou », Thèse de Doctorat de
l'Université Laval, Québec, Canada, 1997.
[MATH13] Site:
http://www.mathworks.com/help/physmod/powersys/ref/battery.html
[MARI01] M. Sc. MARIUSZ MALINOWSKI, « Sensorless
Control Strategies for Three - Phase PWM Rectifiers », Ph.D. Thesis,
Warsaw University of Technology, Poland, 2001.
N
[NOUH08] A. NOUH. « Contribution au
développement d'un simulateur pour les véhicules
électrique routiers ». Thèse doctorat, Université de
Franche-Comté, France, 2008.
[NABT10] K. NABTI, « Stratégies de
commande et techniques intelligentes appliquées aux machines de type
synchrone», Thèse de Doctorat de l'Université MENTOURI,
Constantine, 2010.
P
[PISU05] P. PISU, G. RIZZONI, « A supervisory
control strategy for series hybrid
electric vehicles with two energy storage systems
», Vehicle Power and Propulsion, 2005 IEEE Conference, Ohio State
University, Columbus, USA, 2005.
R
[REKI91] T. REKIOUA. «Contribution à la
modélisation et à la commande vectorielle des MSAP».
Thèse de Doctorat, Institut National Polytechnique, Lorraine, France,
1991.
[ROUS08] G. ROUSSEAU. «Véhicule Hybride et
Commande Optimale». Thèse Doctorat, Ecole Nationale
Supérieure des Mines de Paris, France, 2008.
S
[SEIL98] J. SEILER, D. SCHRODER, « Hybrid vehicle
operating strategies, Electric
Vehicle », Symposium EVS15, Bruxelles,
1998.
V
[VIDO04] L.VIDO. «Étude d'actionneurs
électriques à double excitation destinés au
transport : dimensionnement de structures
synchrones». Thèse de doctorat en Électronique
Électrotechnique Automatique, École Normale Supérieure
(ENS) de Cachan, France, 2004.
W
[WAKE98] E. H. WAKEFIELD, «History of the
Electric Automobile: Hybrid Electric Vehicles», Society of Automotive
Engineers (SAE), Pennsylvania, U.S.A., 1998.
ANNEXE 1
DIMENSIONNEMENT
1. Calcul des paramètres du DC/DC
BOOST
a) Inductance du lissage
Reprenant l'équation du courant qui circule dans la self
:
d?I~ n'-1
?~~ = ~~ aT , et en remplaçant
Vb par son expression : ~
= Lf V~~~
~~
Ce qui implique que ?~Lest maximale
dans le cas où
?~bmax = ~~~~
4Lf
Ainsi l'inductance minimale est donnée par :
~~~~
min = ~ ?~bm !~
b) Capacité de filtrage
?Vbusmax = 4"f
Ainsi la capacité minimale est donnée par :
On suit le même résonnement que celui de
l'inductance du lissage
'b
I.-
#m = ~ ?~busm !~
ANNEXE 2
PARAMÈTRES DU MODÈLE 2. Le
sous-système du stockage électrique
2.1. Modèle de la batterie
|
Grandeurs
|
Valeurs
|
|
SOC initial
|
100 %
|
|
Tension à vide
|
202 V
|
|
Résistance interne
|
0.01 fi
|
2.2. Convertisseur CC/CC
Valeurs des composants
|
Grandeurs
|
Valeurs
|
|
R
|
01 kfi
|
|
C
|
850 tF
|
|
L
|
09 01
|
Valeurs des gains des régulateurs
|
Grandeurs
|
Valeurs
|
|
Régulateur de tension
|
K1
|
0.007
|
|
K4
|
0.1
|
|
Régulateur de courant
|
K1
|
0.007
|
|
K4
|
01
|
|
Tension de référence
|
Elévateur
|
500 V
|
|
Abaisseur
|
210 V
|
|
Fréquence en dents de scie
|
09 *15
|
3. Sous-système de traction
3.1. Machine synchrone à aimants
permanents
Valeurs des composants
|
Grandeurs
|
Valeurs
|
|
Résistance statorique
|
0.05 fi
|
|
Inductance sur l'axe d
|
0.00065 1
|
|
Inductance sur l'axe q
|
0.00065 1
|
|
Flux induit des aimants
|
0.2 78
|
|
Inertie
|
0.1 kg. 02
|
|
Coefficients de friction
|
0.005 Nm. s
|
|
Nombre de paires de pôles
|
03
|
Valeurs des gains des régulateurs
|
Grandeurs
|
Valeurs
|
|
Régulateur de la vitesse
|
K1>
|
1.5
|
|
K4>
|
0.25
|
|
Régulateur de courant 'd
|
K1
|
50
|
|
K4
|
100
|
|
Régulateur de courant 'q
|
K1
|
50
|
|
K4
|
100
|
| 

