2.3. La programmation
2.3.1. Définition de programme
Pour faciliter la programmation, nous allons créer des
fonctions au lieu que les répéter à chaque fois.
Le robot reçoit la commande, selon cette
dernière il fonctionne soit automatiquement ou manuellement. Dans le
fonctionnement automatique il vérifie si il y a une flamme ou non, si
oui il va se dirigé vers la source puis il avancer jusqu'à qu'il
elle arrive, puis éteint la flamme, si non il continue à marcher.
Mais avant de faire n'importe quelle action, il assure qu'il n'y a pas
d'obstacles ou de forage. En ce qui concerne le fonctionnement manuel, il
reçoit l'ordre puis il agir selon lui. Les ordres sont: avancer,
reculer, marcher à droite ou à gauche, mise à jour de la
valeur nominale pour les capteurs infrarouge, le capteur de température
ou le niveau d'eau dans le réservoir, ici aussi il assure toujours qu'il
n'y a pas d'obstacles ou de forage. Thermistance
2.3.2. L'algorithme de programme
Dans le programme on a crée les fonctions suivant :
reception() : pour la réception des ordres de télécommande
marcher_manu() : pour commander le robot manuellement marcher_auto() : pour le
robot marche automatiquement Verifier_obstacle() : pour vérifier les
obstacles et les forage devant le robot
Verifier_flamme() : pour la confirmation de l'existence
de la flamme
64
faire(String action) : pour faire les différents
actions
Mise_a_jour(String capteur) : pour la mise à jour les
valeurs des capteurs et le niveau de réservoir Positionner(String
direct) : pour positionner vers la source de la lumière infrarouge
Et pour beaucoup de détail voir l'annexe B
3. La réalisation
3.1. La réalisation des circuits
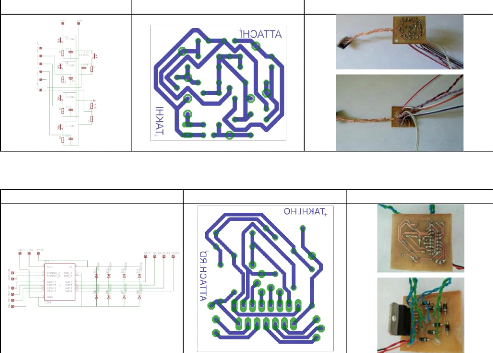
? Le circuit de commande de moteur
Le schéma de circuit
Le circuit imprimé
Le circuit réalisé
Le circuit réaliser
Le schéma de circuit
Le circuit imprimé
? Le circuit des capteurs
65
? Le circuit de commande de la pompe :
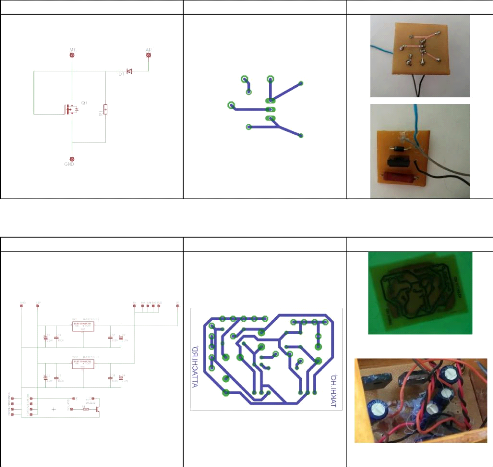
Le circuit réalisé
Le circuit imprimé
Le schéma de circuit
? Le circuit d'alimentation :
Le schéma de circuit
Le circuit imprimé
Le circuit réalisé
Tableau 4.7 Les circuits de robot
3.2. La réalisation de carcasse du robot
Avant de commencer la construction, il est nécessaire
de concevoir un design que nous allons réaliser. Pour sa nous avons
utilisé le logiciel Solid Edge qui nous permet de crée des
différentes pièces et les assembler.

66
Figure 4.23 Solid Edge
Au début, nous avons choisi la forme sous laquelle il
sera le robot, ceci est illustré dans la figure ci-dessous.
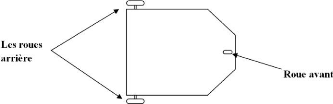
Figure 4.24 La forme sous du robot
Et maintenant, selon nos matières premières,
nous avons divisé la structure en trois parties principales: le
côté droit, le côté gauche et le côté
arrière, comme illustré dans la figure suivante:
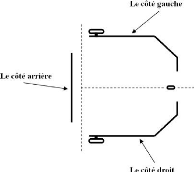
Figure 4.25 Les cotés principales du robot

Support de roulement
Roulement
roue avant
La coté de
droit et de
la
gauche
La coté de
arrière et
de
milieu
Plaque du bas
Plaque du coté
Plaque du haut
Plaque de l'avant
La pièce
pignon
Axe
La pièce conçue
La pièce réalisée
67
Parce que la forme devient maintenant claire, nous pouvons
commencer à la concevoir sous le logiciel et aussi les autres
pièces.
Après le processus de conception, nous pouvons commencer
à réalise les pièces selon le plan.
| 

