II.4. ESPACE DE COULEURS:
La couleur est une donnée importante pour une image, elle
modifie la perception que l'on a de l'image. L'espace de représentation
standard décompose une image en trois plans de couleur:
RGB. Les couleurs finales sont obtenues par synthèse
additive de ces trois couleurs primaires.
Il existe cependant des problèmes qui peuvent
nécessité de changer d'espace de couleur pour percevoir
différemment l'image. Il y a des Images où la couleur importe
peu, par exemple des photographies de cellules vivantes (pseudo-transparentes),
des images

28
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre II : Traitement D'images
Numérique-Navigation
radar, des images satellites... Dans ce cas, l'espace
RGB n'est plus utilisé. On lui préfère
d'autres espaces comme HSV ou YCbCr
[14].
II.5. ACQUISITION: ECHANTILLONNAGE / QUANTIFICATION:
II.5.1. Effets de l'échantillonnage:
-Pixellisation [16] :
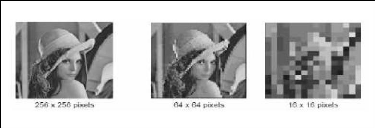
Figure. II.4 : Pixellisation.
Contours en marche d'escalier.
Perte de netteté.
Détails moins visibles/ moins précis.
Perte de résolution.
II.5.2. Effets de la quantification à l'acquisition
: [16]
CAN sur les systèmes d'acquisition d'images.
Codage de la valeur de chaque pixel sur N bits (En
général 8 bits).
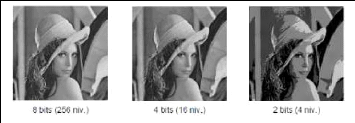
Figure .II.5 : Effets de la quantification
à l'acquisition.
Apparition de faux contours.
Bruit de quantification.
Effet visible à l'oeil en dessous de 6/7 bits.
Quantification sur 8 bits pour l'affichage.

29
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre II : Traitement D'images
Numérique-Navigation
II.5.3. Bruits lies à l'acquisition : Les images
sont souvent entachées de bruit, parfois non visible à l'oeil, et
qui perturberont les traitements [16].

Figure. II.6 : Les images sont prises dans
différent de bruits.
+ Optimiser les conditions d'éclairage.
+ Attention à l'éclairage ambiant.
+ Diaphragme ouvert = faible profondeur de champ. + Eclairage
important = dégagement de chaleur.
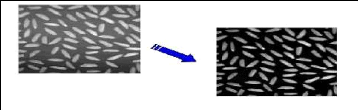
Figure. II.7 : Comparaison entre un
éclairage non uniforme et correction de l'éclairage.
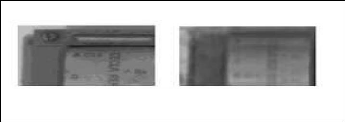
Figure .II.8 : Flou de
bougé/filé dû à un temps de pose/intégration
trop long.

30
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre II : Traitement D'images
Numérique-Navigation
Figure .II.9 : Effet de lignage dû au
balayage entrelacé des caméras vidéo.
Une bonne acquisition Des traitements
facilités
II.6.RECONNAISSANCE DE FORMES:
II.6.1. Définition : A partir
d'un nuage de points (pixels) obtenu après une phase de traitement, on
cherche à retrouver une forme connue a priori qui décrit «au
mieux» les points extraits [17].
II.6.2. Méthode approximation d'une droite
: Méthodes basées sur une approche par moindres
carrés obtenue à partir de la minimisation d'une distance.
Il existe de nombreuses méthodes pour résoudre ce
problème apparemment simple.
Approximation d'une droite
|
|
|
|
Approches Exactes
|
Approches par
Estimation
|
|
|
|
|
Figure. II.10 : Schémas
présente d'approximation d'une droite.
II.6.2.1. Méthodes exactes : On
considère que tous les points extraits participent avec le même
poids à la description de la droite.
II.6.2.2. Approximation par estimation robuste
: Recherche de la meilleure droite représentant au mieux
l'ensemble des points sous l'hypothèse d'un bruit entachant la position
des points [17].

31
Robot Mobile Avec Suivi Visuel De Ligne
II.7. Chapitre II : Traitement D'images
Numérique-Navigation
DOMAINES D'APPLICATION: Permet ces domaines [16]
:
* Contrôle industriel.
* Robotique.
* Télédétection.
* Multi media.
* Médecine.
II.8. TRAITEMENT D'IMAGE ET PERCEPTION
VISUELLE:
Une difficulté fondamentale de la vision artificielle
vient du manque de connaissance profonde des mécanismes qui
régissent la compréhension des images dans la nature. La vision
humaine est en effet extrêmement performante (déplacement,
lecture, reconnaissance), mais nous n'avons aucun retour conscient sur les
mécanismes mis en jeu (à la différence du jeu
d'échec par exemple).
En cela l'étude des mécanismes physiologiques
et psychologiques de la vision est une source très importante
d'information, et d'inspiration [13].
II.9. LES DIFFERENTS TYPES DE NAVIGATION:
II.9.1 Guidage: Cette capacité
permet d'atteindre un but qui n'est pas un objet matériel
directement visible, mais un point de l'espace
caractérisé par la configuration spatiale d'un ensemble d'objets
remarquables, ou amers, qui l'entourent ou qui en sont voisins [12] .
Ø La stratégie de navigation, souvent une
descente de gradient également, consiste
alors à se diriger dans la direction qui permet de
reproduire cette configuration. Ø Cette capacité semble
utilisée par certains insectes, comme les abeilles, et a
été
utilisée sur divers robots.
Ø Cette stratégie utilise également des
actions réflexes et réalise une navigation locale qui requiert
que les amers caractérisant le but soient visibles.
II.9.2. Action associée à un lieu
: Cette capacité est la première capacité
réalisant une navigation globale, c'est-à-dire qui permette de
rejoindre un but depuis des positions pour lesquelles ce but ou les amers qui
caractérisent son emplacement sont invisibles [12].
ü Elle requiert une représentation interne de
l'environnement qui consiste à définir des lieux comme des zones
de l'espace dans lesquelles les perceptions restent similaires, et à
associer une action à effectuer à chacun de ces lieux.

32
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre II : Traitement D'images
Numérique-Navigation
V' L'enchaînement des actions associées
à chacun des lieux reconnus définit une route qui permet de
rejoindre le but.
V' Ces modèles permettent donc une autonomie
plus importante mais sont limités à un but fixé.
V' Une route qui permet de rejoindre un but ne pourra
en effet pas être utilisée pour rejoindre un but
différent.
V' Changer de but entraînera l'apprentissage d'une
nouvelle route, indépendante des routes permettant de rejoindre les
autres buts.
II.9.3. Navigation topologique: Cette
capacité est une extension de la précédente qui
mémorise dans le modèle interne les relations spatiales entre les
différents lieux [12].
· Ces relations indiquent la possibilité de se
déplacer d'un lieu à un autre, mais ne sont plus associées
à un but particulier. Ainsi le modèle interne est un graphe qui
permet de calculer différents chemins entre deux lieux arbitraires.
· Ce modèle ne permet toutefois que la planification
de déplacements parmi les lieux connus et suivant les chemins connus.
II.9.4. Navigation métrique:
Cette capacité est une extension de la précédente car elle
permet au robot de planifier des chemins au sein de zones inexplorées de
son environnement. Elle mémorise pour cela les positions
métriques relatives des différents lieux, en plus de la
possibilité de passer de l'un à l'autre.
Ces positions relatives permettent, par simple composition de
vecteurs, de calculer
une trajectoire allant d'un lieu à un autre, même si
la possibilité de ce déplacement n'a pas été
mémorisée sous forme d'un lien [12].
II.10. CARACTÉRISTIQUE:
En robotique mobile, comme pour l'homme ou certains animaux,
l'utilisation de cartes est quasiment indispensable pour permettre d'effectuer
des tâches de navigation dans des conditions environnementales complexes,
qui ne sont pas spécialement adaptées pour le robot.
La construction et l'utilisation de telles cartes posent
cependant de nombreux
problèmes, notamment pour garantir l'adéquation
entre la carte et le monde réel. Pour cette raison, la plupart des
robots trouvent aujourd'hui un compromis entre une approche

33
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre II : Traitement D'images
Numérique-Navigation
réactive et une approche utilisant une carte afin de
bénéficier de la rapidité et de la
robustesse de la première et de la capacité de
déplacement à long terme de la seconde [12].
II.11. LES REPRÉSENTATIONS DE
L'ENVIRONNEMENT: II.11.1. Carte
topologique:
II.11.1.1. Description:
Représenter l'environnement du robot sous forme de graphe: Les noeuds du
graphe correspondent à des lieux, c'est-à-dire des positions que
le robot peut atteindre et Les arêtes liant les noeuds marquent la
possibilité pour le robot de passer directement d'un lieu à un
autre et mémorisent en général la manière de
réaliser ce passage.
La détection et la mémorisation des lieux reposent
en général sur deux procédures qui utilisent les
perceptions : La première permet simplement de comparer deux perceptions
et donc de reconnaître un lieu de la carte ou de détecter un lieu
nouveau et La seconde procédure permet de mémoriser un nouveau
lieu ou d'adapter la définition d'un lieu lors des passages successifs
du robot en ce lieu.
La première procédure peut donner des
résultats erronés. Par exemple, un lieu déjà
visité peut ne pas être reconnu, ou un lieu nouveau peut
être confondu avec un lieu déjà mémorisé.
Pour résoudre ces problèmes, la reconnaissance des lieux fera
donc appel aux données proprioceptives en plus des perceptions [12].
II.11.1.2. Avantage : Un avantage important des
cartes topologiques est qu'elles ne
requièrent pas de modèle métrique des
capteurs pour fusionner les données proprioceptives et les perceptions
au sein d'une représentation unifiée de l'environnement.
Le bruit sur les mesures des capteurs influe principalement sur
la reconnaissance des lieux, tandis que le bruit sur les données
proprioceptives influe principalement sur la position associée à
chaque lieu.
La mémorisation de l'environnement sous forme d'un
ensemble de lieux distincts autorise en général une
définition des lieux plus directement reliée aux capacités
perceptives du robot.
Il n'y a pas de limitation au type de capteurs utilisables, Cette
utilisation directe des perceptions permet meilleure mise en relation du robot
avec son environnement.

34
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre II : Traitement D'images
Numérique-Navigation
La discrétisation de l'environnement correspondant au
choix des lieux représentés dans la carte est un autre point fort
des cartes topologiques. Cette discrétisation est en effet très
utile pour la planification des mouvements du robot, qui se réduit alors
à la recherche de chemin dans un graphe [12].
II.11.1.3. Inconvénient :
Nécessitent en général une exploration
très complète de l'environnement pour le représenter avec
précision.
Représentant des lieux avec une assez grande
densité spatiale, cela peut être un inconvénient, car
l'exploration complète de l'environnement demandera un temps
important.
La reconnaissance des lieux de l'environnement peut
également être difficile dans le cas de capteurs très
bruités, ou d'environnements très dynamiques. Il devient alors
très difficile d'estimer correctement la position du robot au sein de
cette carte et de lui ajouter de nouvelles informations sans erreurs.
La représentation de l'environnement peut être assez
proche des données brutes des capteurs du robot, ce qui peut être
un avantage du point de vue de l'autonomie du robot [12].
| 

