3.2 La carte à PIC 16F877
3.2.1. Principe
Indépendamment de ce qu'on veut faire (chapitre 02) de
40 lignes de PIC (que l'on définit par lignes d'entrée/sortie) et
quelle que soit l'application à laquelle on le destine, un
microcontrôleur PIC 16F877, pour pouvoir fonctionner, a
nécessairement besoin de :
- Une alimentation de 5 Volts.
- Un quartz et deux condensateurs (si un pilotage précis
par base de temps à quartz est nécessaire), ou une
résistance et un condensateur (pour une base de temps de type RC,
économique, utilisable dans les cas ne demandant pas une extrême
précision de cadencement) - Un condensateur de découplage (pour
réduire les transitoires se formant inévitablement dans tout
système impulsionnel).
- Un bouton poussoir et une résistance, pour la mise en
place d'une commande de Reset.
Ces éléments (qu'il convient de
considérer comme des invariants devant nécessairement figurer
dans tout montage) représentent le cortège obligatoire de tout
microcontrôleur PIC 16F877, de la même façon un transistor
demande, pour fonctionner, une résistance de Base et une
résistance de Collecteur.
Les applications type sont les suivantes :
1
13
PIC
16F8XX

1
13
14
PIC
16F8XX
C1
R
GND

R
X1
C1
GND
1) Pilotage par quartz 2) Pilotage par
oscillateur RC
Figure 4.3 : Les deux types de pilotage
Chapitre 04
Réalisation pratique
43
Pour notre robot nous avons choisi l'oscillateur par quartz pour
ce qu'il ce type est simple et plus utilisé.
3.2.2. Schéma électronique
Le schéma électronique de la PIC avec son
oscillateur est présenté dans la figure suivante :
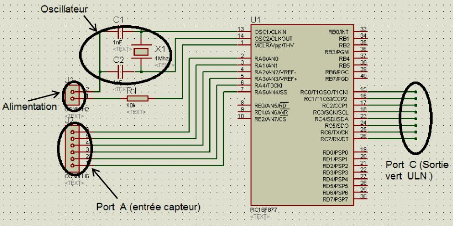
Figure 4.4 : Schéma électronique
de la PIC avec oscillateur. 3.3. Commutateur de puissance
ULN2803
Le circuit intégré ULN2803 (Figure 4.5) qui a le
rôle de transformer les signaux numériques en des signaux pouvant
effectivement alimenter les deux moteurs.
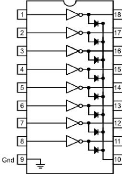
Le circuit intégré ULN2803 est à la base
de ce commutateur, il est composé de 8 darlington (deux transistors NPN
montés en cascade) de puissance et de diodes de protection. Chaque
étage d'amplification inverseur qui adapte le niveau de tension et
d'intensité TTL de l'entrée pour fournir une intensité
jusqu'à 500mA sous une tension pouvant aller jusqu'à 50V en
sortie, Afin d'alimenter les huit phases de deux moteurs, on a utilisé
les huit Darlington. Les impulsions attaquant les Darlington commutent les
bobines des deux moteurs à la masse.
La Figure 4.6 donne le schéma interne de l'ULN2803

Figure 4.5: ULN 2803
Chapitre 04
Réalisation pratique
44
Figure 4.6: schéma interne de l'ULN2803
La structure interne du Darlington est donnée sur la Figure 4.7:

Figure 4.7: Montage d'un Darlington
Pour bien comprendre le fonctionnement de ce circuit
intégré dans notre montage visualiser la Figure 4.8.

ULN2803
M2
M1

Figure 4.8 : Bloc de commutateur de puissance
avec les moteurs
Chapitre 04
Réalisation pratique
45
| 

