I.5. Les différents types de stabilité
:
Pour analyser et résoudre les problèmes
d'instabilité dans les systèmes
électro-énergétique, il est indispensable de regrouper les
différents groupes de stabilité. Cette classification de la
stabilité est basée sur les considérations
suivantes[6]:
· la nature physique de l'instabilité
résultante.
· l'amplitude de la perturbation.
· la plage de temps nécessaire pour assurer la
stabilité.
· les dispositifs et les processus nécessaires pour
assurer la stabilité.
Habituellement, la stabilité est divisée en trois
groupes, a savoir[3]:
· la stabilité de l'angle de rotor.
· la stabilité de tension.
· la stabilité de fréquence.
La figure(I.2) présente ces principales
catégories de stabilité d'un système de puissance et leurs
sous-catégories.
CHAPITRE I Stabilisation d'un Système
Électro-énergétique
Traditionnellement, le problème de la stabilité
a été de maintenir le fonctionnement synchrone des
générateurs du système. Ainsi, pour avoir une production
satisfaisante de la puissance électrique, toutes les machines synchrones
du système doivent fonctionner en synchronisme. Cet aspect de la
stabilité est influencé par les dynamiques de l'angle de rotor de
générateur et de la relation puissance-angle.
L'instabilité peut également avoir lieu sans
perte de synchronisme. Par exemple, un système composé d'un
générateur alimentant un moteur à induction peut devenir
instable en raison de l'effondrement de la tension de la charge. Dans ce cas,
c'est la stabilité et le contrôle de la tension qui créent
le problème, plutôt que le maintien du synchronisme. Ce type
d'instabilité peut aussi se produire dans le cas de charges couvrant une
vaste zone dans un grand système.
Un autre type d'instabilité peut avoir lieu : dans
l'éventualité d'un fort écart entre la puissance de la
charge et la puissance de la génération, les contrôleurs
principaux des générateurs et de la charge deviennent importants.
S'ils ne sont pas bien coordonnés, il est possible que la
fréquence du réseau devienne instable. Des unités de
générations et/ou de charges peuvent finalement être
déclenchées en entraînant une panne du système. Dans
ce cas, les générateurs peuvent rester en synchronisme mais le
système devient instable[3].
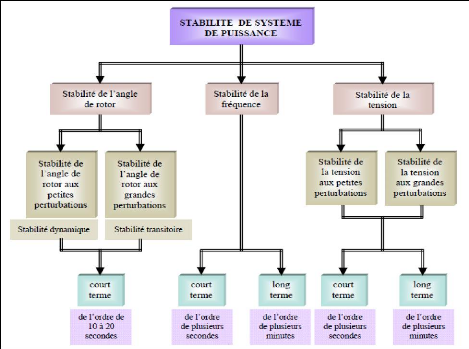
Figure I.2. Classification des
différents types de la stabilité de système
électro-énergétique.
22
CHAPITRE I Stabilisation d'un Système
Électro-énergétique
23
CHAPITRE I Stabilisation d'un Système
Électro-énergétique
I.5.1.La stabilité de l'angle de rotor :
Etant donne que la génération de puissance
électrique dépend principalement des machines synchrones, un
aspect important est le fonctionnement de ces générateurs au
synchronisme[7]. Au synchronisme, les rotors de chaque machine
synchrone du système tournent à la même vitesse
électrique et les angles entre les champs magnétiques, rotoriques
et statoriques, restent constants.
En fonctionnement nominal équilibre, la puissance
électrique fournie par le générateur aux charges est
égale, en négligeant les pertes, a la puissance mécanique
fournie par la turbine. Quand le système est perturbe, la puissance
électrique de la machine varie rapidement, mais la variation de
puissance mécanique fournie à la machine est relativement lente.
En raison de cette différence de vitesse de réponse, un
écart temporaire d'équilibre de puissance a lieu. Par
conséquent, ce déséquilibre de puissance entraine une
variation des couples agissant sur le rotor. Ceci entraine une
accélération ou décélération du rotor selon
le sens du déséquilibre, voire un glissement du champ de
synchronisme en entrainant une perte de synchronisme du
générateur avec le reste du système[8].
Si l'équilibre de puissance n'est pas rétabli, la machine est
mise hors service par une protection de survitesse ou de perte de synchronisme,
et la stabilité du Système est mise en danger.
Suite à une perturbation au système, le facteur
principal qui détermine l'évolution de l'état du
système est l'écart entre les angles de rotor. (Les angles sont
mesures par rapport à une référence tournante au
synchronisme). Nous pouvons dire que les angles de rotor d'un système de
puissance peuvent évaluer selon deux scenarios[9]:
? Soit, les angles de rotor s'accroissent ensemble et
oscillent à l'unisson. Ils peuvent éventuellement atteindre de
nouvelles valeurs stables. Tant que les écarts entre les angles de rotor
restent constants, le Système reste stable et il demeure au
synchronisme.
? Soit, un ou plusieurs angles de rotor s'accroissent plus
rapidement que les autres. Alors, les écarts entre les angles de rotor
divergent dans le temps. Le système devient par conséquent
instable et il perd le synchronisme.
Suivant l'amplitude de la perturbation, nous pouvons
caractériser la stabilité de l'angle de Rotor en deux
sous-catégories :
I.5.1.1. Stabilité angulaire aux grandes
perturbations (stabilité transitoire) :
« Elle concerne la capacité du
système de puissance de maintenir le synchronisme après avoir
subi une perturbation sévère transitoire tel un court-circuit sur
une ligne de transmission ou
24
une perte d'une partie importante de la charge ou de la
génération. La réponse du système implique de
grandes variations des angles de rotor. Elle dépend de la relation
non-linéaire couples- angles ».
? ? ??
La stabilité transitoire dépend non seulement de
l'amplitude des perturbations et du point de fonctionnement initial mais elle
dépend également des caractéristiques dynamiques du
système. Elle se manifeste à court terme sous forme d'un
écart croissant de façon apériodique de certains angles de
rotor. Si l'instabilité se manifeste directement suite à la
perturbation (plus précisément dans la première seconde
qui suit l'élimination du défaut), elle est appelée
instabilité de première oscillation (First Swing Instability),
(cas 1, figure (I.3)), et elle s'étend sur 3 à 5 secondes.
L'instabilité transitoire peut aussi se manifester
autrement. Elle peut résulter de la superposition des effets de
plusieurs modes d'oscillation lents excités par la perturbation,
provoquant ainsi une variation importante de l'angle de rotor au-delà de
la première oscillation (instabilité de multi oscillations), (cas
2, figure (I.3)). La gamme de temps associée va de 10 à 20
secondes[3].
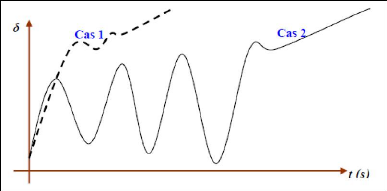
Figure I.3. Variation d'angle de
rotor.
Cas 1 : instabilité de première
oscillation. Cas 2 : instabilité de
multi-oscillations.
Le concept de stabilité transitoire peut
être expliqué par une approche graphique simple, à
savoir
le critère d'égalité des aires (Equal Area
Criterion). Cette approche regroupe l'équation du
mouvement et la courbe traditionnelle représentant la
relation entre la puissance produite
par le générateur et
l'angle de rotor [8].
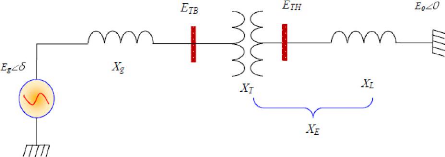
Pour expliquer cette approche, nous prenons un système
de puissance simple constitué d'un générateur synchrone
connecté à un jeu de barre infini via une ligne de transmission,
figure (I.4)
[3]. Le générateur est
modélisé par une source de tension idéale en série
avec une réactance
Xg
(modèle classique). La ligne et le transformateur sont
représentés par la réactance .
CHAPITRE I Stabilisation d'un Système
Électro-énergétique
25
Figure 1.4. Machine synchrone
connectée à un jeu de barre infini. a. Relation
puissance-angle de rotor :
Dans l'état équilibré, la puissance produite
par le générateur est donnée par l'équation
suivante :
(I.1)
Où, , l'angle de rotor (dit ici, l'angle de puissance),
est le déphasage entre la tension interne du
générateur et la tension du jeu de barre infini
.L'équation (I.1) est représentée
graphiquement à la figure (I.5).
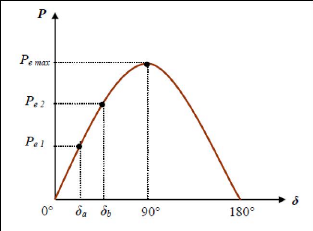
Figure I.5. Relation puissance-
angle de rotor.
Lors de l'équilibre, la puissance électrique est
égale à la puissance mécanique appliquée
CHAPITRE I Stabilisation d'un Système
Électro-énergétique
26
pour l'angle correspondant .
Un brusque changement sur la charge du générateur
entraîne une variation de la puissance
mécanique, et par conséquent de la puissance
électrique, par exemple de à , figure (I.5).
Le rotor va donc accélérer de sorte que l'angle de
puissance augmente, de à , pour pouvoir
fournir une puissance supplémentaire à la charge.
Cependant, l'accélération du rotor ne peut pas
s'arrêter instantanément. Ainsi, bien que la
puissance développée pour l'angle soit suffisante
pour la charge, le rotor va dépasser l'angle
jusqu'à ce qu'un couple opposé suffisant soit
développé pour arrêter cette
accélération. L'énergie supplémentaire va
entraîner le ralentissement du rotor et la diminution de l'angle de
puissance. Suivant l'inertie et l'amortissement du système, les
oscillations de l'angle de rotor résultant vont ou s'amortir, et la
machine restera stable (cas 1, figure (I.6)), ou diverger, et la machine
deviendra instable en perdant le synchronisme avec le système (cas 2,
figure (I.6)) [3].
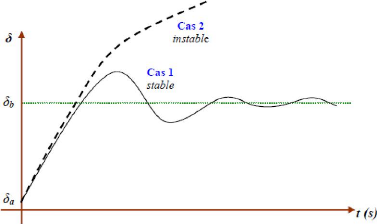
Figure I.6. Variation d'angle de
rotor.
b. Critère d'égalité des aires
:
Considérons un défaut, tel un défaut sur
la ligne de transmission, appliqué au système
précédent disparaissant après quelques périodes du
système. Ceci va modifier l'écoulement de puissance et,
par conséquent, l'angle de rotor ä.
Retraçons la courbe en tenant compte de ce défaut,
figure (I.7). En dessous de cette courbe, nous pouvons
considérer deux zones[10]:
27
CHAPITRE I Stabilisation d'un Système
Électro-énergétique
d28 Co
?
dt2 2H
(Pm Pe)
? La première zone (zone , zone
d'accélération) se situe au-dessous de la droite
horizontale correspondante au point de fonctionnement initial
(la droite de charge). Elle est limitée par les deux angles de rotor (
et ) correspondants à l'apparition et à la disparition de
défaut. Cette zone est caractérisée par l'énergie
cinétique stockée par le
rotor du fait de son accélération : .
? La deuxième zone (zone , zone de
décélération), qui commence après
l'élimination du défaut, se situe en dessus de la droite de
charge : elle est caractérisée par la
décélération
du rotor : .
Si le rotor peut rendre dans la zone toute l'énergie
cinétique acquise durant la première phase,
le générateur va retrouver sa stabilité.
Mais si la zone ne permet pas de restituer toute
l'énergie cinétique, la
décélération du rotor va continuer jusqu'à la perte
de synchronisme.
d
2 .
d
La relation entre les aires des zones ( et ) et la
stabilité transitoire peut être
mathématiquement
expliquée comme suit :
Rappelons tout d'abord que l'équation du mouvement de
générateur est donnée par la relation suivante :
0
?
(I.2)
: la constante d'inertie.
: la vitesse de synchronisme.
: la puissance mécanique fournie au
générateur. : la puissance électrique du
générateur.
En multipliant cette équation par ,en intégrant
par rapport au temps et en faisant un
2 s 2
? d s ? ? 0
?? ? ? ? ? ?
cte ? P P ? . d
s
m e
dt ?H
?2
changement de variables, nous obtenons :
s0 (I.3)
?0
: l'angle de rotor, initial, à l'instant de l'application
de défaut. : l'angle de rotor à la fin de la période
transitoire.
CHAPITRE I Stabilisation d'un Système
Électro-énergétique
28
Ainsi, lorsque: la constant
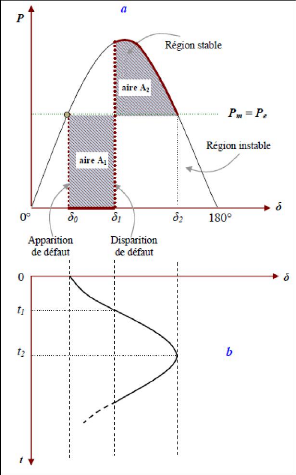
Figure I.7. Courbes (a
: puissance-angle) et (b : variation d'angle de
rotor) du générateur suite à un défaut de
transmission.
d? ? 0.
Après l'élimination du défaut, l'angle
ä va s'arrêter de varier et le générateur va
retrouver sa
dt
vitesse de synchronisme, lorsque
( P - P ) .
d = 0
m e
Par conséquent, l'équation (91) s'écrit
comme suit :
(I.5) CHAPITRE I Stabilisation d'un Système
Électro-énergétique
29
Où : est l'angle de rotor à l'instant de
l'élimination de défaut.
(I.6)
Ainsi, la limite de la restauration de la stabilité
transitoire se traduit mathématiquement par
l'égalité des aires de la zone A1 et de la zone
: cette condition est appelée critère d'égalité
des
aires (Equal Area Criterion).
Par conséquent, les contrôleurs de la
stabilité transitoire peuvent améliorer la stabilité soit
en diminuant la zone d'accélération (zone ), soit en augmentant
la zone de décélération (zone)
Cela peut être réalisé soit en augmentant
la puissance électrique, soit en diminuant la puissance
mécanique.
En outre, un système statique d'excitation avec une
tension maximale élevée et d'un régulateur de tension
possédant une action "puissante" et rapide représente un moyen
très efficace et économique pour assurer la stabilité
transitoire[11]. Enfin, une amélioration signifiante de
la stabilité transitoire est obtenue avec des systèmes
très rapides de détection des défauts et de
disjoncteurs.
| 

