|
République Algérienne Démocratique
et Populaire
Ministère de l'enseignement Supérieur
et de la
Recherche scientifique


Université Echahid Hamma
Lakhdar-
El-Oued
Faculté des Sciences et de
Technologies

2014/2015
Mémoire de Fin d'Etude
En vue de l'obtention du diplôme de
MASTER ACADEMIQUE
Domaine : Sciences et de
Technologies
Filière: Génie Électrique
Spécialité: Réseaux
Électriques
Thème

Étude de la stabilité d'un
système
électro-énergétique par
différentes
techniques avancées
Diriger par : Réaliser par :
Mr.Touil Slimane Ben Abdelhamid Oualid
Année universitaire :

Remerciement
Nous remercions particulièrement notre promoteur
Mr.
Touil Slimane, pour son dévouement exceptionnel,
sa
précieuse directive et son suivi constant.
Nos sincères et chaleureux remerciement
à
Haga Oualid pour son aide, son appuis moral, et
ses
qualités humaines.
Nous remercions également Lappi
Moussab
pour son aide.
Nous tenons également à remercier le
président et les
membres du jury pour nous avoir fait
l'honneur
d'évaluer notre travail.
Que tous les professeurs ayant contribué à
notre
formation trouvent ici notre profonde reconnaissance.
Dr et Mr : Meada idris ,Lappi
yacine,Kechida
Reda,Zelouma laid,Mesbahi nedhir,Merrazga
azeddine,Bekakra
youcef,Allag abdelkrim,Guia
housame,Ben Atous djelani,Gasmi.
Dédicace
Nous consacrons ce modeste travail a:
Nos chers parents
Nos soeurs et nos frères
A toute
la famille :Ben abdelhamid
A toute la famille :Daoudi
Tous nos amis
A touts mes camarades de la promotion 2013/2015 pour les bons
moments passés ensemble.
Tous les enseignants qui m'ont aidé
de proche ou de
loin.
III
Liste des figures

Liste des figures
Figure. I.1. Système standard IEEE type SMIB avec
commande d'excitation 20
du générateur synchrone puissant 20
Figure I.2. Classification des différents types de la
stabilité de système électro-énergétique.
22
Figure I.3. Variation d'angle de rotor. 24
Cas 1 : instabilité de première oscillation. Cas
2 : instabilité de multi-oscillations. 24
Figure 1.4. Machine synchrone connectée à un jeu
de barre infini. 25
Figure I.5. Relation puissance- angle de rotor. 25
Figure I.6. Variation d'angle de rotor. 26
Figure I.7. Courbes (a : puissance-angle) et (b : variation
d'angle de rotor) du générateur suite à
un défaut de transmission. 28
Figure I.8. Zone de la stabilité D. 34
Figure I.9. Caractéristiques de la réponse
indicielle d'un système. 36
Figure II.1. Circuit équivalent de la machine synchrone
connectée a un jeu de barre infini 42
Figure II.2.Modèle classique de
générateur. 43
Figure II.3. La relation (puissance-angle) du
générateur et le coefficient 44
de couple synchronisant 44
Figure II.4. Couple mécanique et électrique
agissant sur l'axe d'un générateur. 45
Figure II.5. Schéma bloc du système (mono
machine-jeu de barre infini) avec le 47
Modèle classique. 47
Figure II.6. Circuits équivalents relatifs de
l'enchainement du flux de la machine et courant. 48
Figure II.7. Représentation de schéma
fonctionnel avec la constante Efd 52
Figure II.8. Structure générale d'un
système de force motrice-générateur. 54
Figure II.9. Structure d'un système d'excitation
statique avec son AVR 56
Figure II.10. système d'équitation statique
(thyristor) avec AVR. 57
Figure II.11. Représentation du schéma bloc avec
l'excitateur et AVR. 59
Figure II.12. Représentation du schéma bloc avec
AVR et PSS. 60
Figure II.13. Système d'excitation statique avec AVR et
PSS. 61
Figure III.1. Modèle simplifie de liaison entre un PSS
et le système. 67
Figure III.2. Modèle d'un PSS avance/retard. 67
Figure III.3. Modèle de Heffron-Philips d'un
système (mono-machine-jeu de barre infini) 69
Figure III.4. Déplacement de valeur propre par la
rotation du résidu associe. 71
Figure III.5. L'ensemble (systeme-PSS) en boucle fermee. 73
iv
Liste des figures
Figure III.6. Représentation du réseau SMIB+PSS
sur MATLAB/Simulink. 75
Figure III.7. Présente la variation du position
angulaire. 76
Figure III.8. Présente la variation de la vitesse
angulaire. 76
Figure III.9. Présente la variation du couple
électrique. 76
Figure III.10. Présente la variation de la tension
terminale. 77
Figure III.11. Représentation du réseau SMIB+AVR
sur MATLAB/Simulink. 77
Figure III.12. Présente la variation du position
angulaire 78
Figure III.13. Présente la variation de la vitesse
angulaire. 78
Figure III.14. Présente la variation du couple
électrique. 78
Figure III.15. Présente la variation de la tension
terminale. 79
Figure III.16. Présente la variation de la vitesse
angulaire par rapport la variation d'angle. 79
Figure IV.1. Comparaison d'un ensemble classique et d'un
ensemble flou 85
Figure IV.2. Fonction caractéristique. 85
Figure IV.3. Fonction d'appartenance. 86
Figure IV.4. Fonction d'appartenance, variable et terme
linguistique. 86
Figure IV.5. Fonctions d'appartenance linéaires par
morceaux 87
Figure IV.6. Fonction d'appartenance singleton. 88
Figure IV.7. Fuzzification. 88
Figure IV.8. Traitement flou. 91
Figure IV.9. Implication. 93
Figure IV.10. Fuzzification. 93
Figure IV.11. Activation. 94
Figure IV.12. Implication. 94
Figure IV.13. Agrégation des règles 95
Figure IV.14. Défuzzification par centre de
gravité. 96
Figure IV.15. Structure de base d'un contrôleur flou.
97
Figure VI.16. Fonctions d'appartenance pour
l'accélération. 100
Figure VI.17. Fonctions d'appartenance pour la variation de
vitesse. 100
Figure VI.18. Fonctions d'appartenance pour la tension.
100
Figure IV.19. Exécution de contrôleur de logique
floue. 102
Figure IV.20. Représentation du réseau
SMIB+FuzzyPSS sur MATLAB/Simulink. 103
Figure IV.21. Présente la variation de la position
angulaire1. 104
Figure IV.22. Présente la variation de la vitesse
angulaire. 104
Figure IV.23. Présente la variation du couple
électrique 104
Figure IV.24. Présente la variation de la tension
terminale. 105
Liste des figures
Figure IV.25. Présente la variation de la vitesse
angulaire par rapport l'angle. 105
Figure IV.26. Présente la variation de la position
angulaire. 106
Figure IV.27. Présente la variation de la vitesse
angulaire. 106
Figure IV.28. Présente la variation du couple
électrique 106
Figure IV.29. Présente la variation de la tension
terminale. 107
Figure IV.30. Présente la variation de la position
angulaire. 108
Figure IV.31. Présente la variation de la vitesse
angulaire. 108
Figure IV.32. Présente la variation du couple
électrique 108
Figure IV.33. Présente la variation de la tension
terminale. 109
Figure IV.34. Présente la variation de la vitesse
angulaire par rapport l'angle. 109
Figure V.1. Représentation schématique des deux
régions du système étudié. 114
Figure V.2.Exemple mécanique analogue aux oscillations
inter-régions 115
Figure V.3. Configuration d'un générateur
équipé supplémentaire stabilisateur. 116
Figure V.4. Représentation du réseau test sur
MATLAB/Simulink. 117
Figure V.5. Présente la variation des tensions des
bus(1 et 2) . 117
Figure V.6. Présente la variation de Puissance active
de ligne(B1 à B2). 118
Figure V.7. Présente la variation des angles de rotors
des générateurs vs G4. 118
Figure V.8. Présente la variation de Vitesses
angulaires des générateurs. 118
Figure V.9. Présente la variation des Puissances
actives des générateurs. 119
Figure V.10. Présente la variation des Tensions
terminale des générateurs. 119
Figure V.11. Présente la variation des tensions des
bus(1 et 2) . 120
Figure V.12. Présente la variation de Puissance active
de ligne(B1 à B2). 121
Figure V.13. Présente la variation des angles de rotors
des générateurs vs G4. 122
Figure V.14. Présente la variation de Vitesses
angulaires des générateurs. 123
Figure V.15. Présente la variation des Puissances
actives des générateurs. 124
Figure V.16. Présente la variation des Tensions
terminale des générateurs. 125
V
Liste des tableaux

Liste des tableaux
Tableau III.1. Comparaison des critères temporels
instantanés du système avec et sans PSS. 79
Tableau III.2. Comparaison des critères temporels
intégraux du système avec et sans PSS 80
Tableau IV.1. Base de règles floues et base de
règles classiques. 91
Tableau IV.2. Implication représentée en
tableau. 96
Tableau IV.3. Variables floues pour la fonction
d'appartenance. 99
Tableau IV.4. Base de règles de contrôleur a
logique floue. 101
Tableau IV.5. Comparaison des critères temporels
intégraux 105
Tableau IV.6. Comparaison des critères temporels
instantanés. 109
Tableau IV.7. Comparaison des critères temporels
intégraux. 110
vi
vii
Notation

Liste des notations
Acronymes:
SMIB Single Machine Infinite Bus (machine unique reliée
à un noeud infini)
IEEE Institute of Electrical and Electronics Engineers, en
français l' Institut des
ingénieurs électriciens et
électroniciens.
CFF Chemins de fer fédéraux suisses
IAE Critère, Intégrale de l'Erreur Absolue
(Intégral of Absolute Error)
ISE Critère, Intégrale du Carrée de
l'Erreur (Intégral of Square Error)
ITAE Critère, Intégrale de l'Erreur Absolue
pondérée par le Temps (Intégral
Time multiplied by Absolute Error)
SVCs (Static Var Compensator systèmes)
HVDC High-voltage direct current, en française Le
courant continu haute tension
(CCHT)
RNA Réseau de neurones artificiel
FACTS Flexible AC Transmission System
AVR Automatic Voltage Regulator (régulateur automatique
de tension)
PSS Power System Stabilizer (stabilisateur du système
de puissance)
Mamdani Le mécanisme d'inférence le plus couramment
utilisé dans fuzzy (Ebrahim
Mamdani )
FLPSS Fuzzy logic PSS
FUZZY La logique floue (fuzzy logic, en anglais)
trimf Mode triangulaire
trapmf Mode trapézoïdale
gaussmf Mode gaussienne
VIII
Notation
gauss2mf Mode gaussienne
psigmf Mode sigmoïdes
Symboles:
E = fem Force électromotrice du
générateur (pu)
EB ? E0 La tension du
jeu de barre infini(pu)
Et impédance externe de réseau(pu)
Efd La tension de sortie d'excitation(pu)
X Réactance synchrone et réactance
transitoire(pu)
Xe ? XE
Réactance de ligne.(pu)
Xg Réactance de
générateur (pu)
Pe Puissance électrique (pu)
Pm Puissance mécanique (pu)
Pe Puissance électrique (pu)
S Puissance apparent(pu)
Te Couple électrique(pu)
TA Le couple d'amortissement(pu)
Ts Le couple synchronisant(pu)
Tm Couple mécanique fourni par la
turbine(pu)
Te Couple
électromagnétique(pu)
Ks Coefficient de couple synchronisant(pu)
KA Coefficient de couple d'amortissent(pu)
KD Coefficient d'amortissement du
générateur(pu)
ix
Notation
KPSS Le gain de stabilisateur avance retard de
phase(pu)
S?fd Flux de circuit de
générateur synchrone(pu)
?d Flux de stator(pu)
Lads Inductances propres d'un enroulement du
stator(pu)
id Courant du générateur axe
direct (pu)
iq Courant du générateur axe
quadratique (pu)
Ra Résistance par phase
statorique(pu)
w0 Vitesse de synchronisme.(pu)
?w Variation da vitesse de rotor
w n Pulsation naturel
wi Fréquence du mode A i
en rad/sec
H Constante d'inertie
?cr Valeur critique du facteur d'amortissement
8 Angle de rotor
?cr Marge de stabilité absolue
?f Variation de la la fréquence du jeu de
barre
Dp % Dépassement maximum en pour
cent
t p Temps de pic
tr ?5%? Temps de réponse (temps
d'établissement)
e?t? L'erreur dynamique associée a la
réponse indicielle du système
x
Sommaire

Sommaire
Remerciement:................................................................................................................................i
Dédicace : ii
Listedes figures : iii
Listedes tableaux
:.........................................................................................................................vi
Notations:......................................................................................................................................vii
Résumé : viii
Introductiongénérale : xiv
Chapitre1 : Stabilisation d'un Système
Électro-énergétique
I.1.Introduction : 18
I.2. Définitions: 19
I.2.1. Système électro-énergétique:
19
I.2.2. Réseau infini: 19
I.2.3. Synchronisme: 19
I.2.4. Stabilité d'un système
électro-énergétique : 19
I.3.Description générale du système
électro-énergétique étudie : 19
1.4.Les causes d'instabilité: 20
I.5. Les différents types de stabilité : 21
I.5.1.La stabilité de l'angle de rotor : 23
I.5.1.1. Stabilité angulaire aux grandes perturbations
(stabilité transitoire) : 23
I.5.1.2. Stabilité angulaire aux petites perturbations
(stabilité dynamique) : 29
I.5.2. La stabilité de tension : 30
I.5.3. La stabilité de fréquence : 32
I.6.Introduction aux contrôleurs: 33
I.6.1. Nouveaux types de PSS: 33
I.7. Analyse de la performance et critères de bonne
régulation : 33
I.7.1 Critères d'analyse du modèle linéaire
: 33
I.7.2. Critères de simulation : 35
I.8. Conclusion : 39
Chapitre2 : Modélisation du Système
Électro-énergétique
II.1.Introduction : 41
xi
Sommaire
II.2. Modèle du générateur: 42
II.2.1.Équations électriques : 43
II.2.2.Équations mécaniques : 45
II.2.3.l'effet dynamique du circuit de champ : 48
II.3.Régulation du générateur : 53
II.3.1.Régulateur de fréquence et modèle de
la turbine : 53
II.3.2.Régulateur de tension et modèle du
système d'excitation : 55
II.4.Modèle de power system stabiliser PSS: 59
II.4.1.Modèle du système d'excitation avec PSS:
60
II.5.Conclusion : 63
Chapitre3 : Stabilisateur de puissance (PSS
conventionnel)
III.1. Introduction : 65
III.2.Fonctionnement et modèle de PSS: 66
III.3.Réglage des paramètres de PSS: 69
III.3.1.Méthode de compensation de phase : 69
III.3.2.Méthodes du résidu : 71
III.3.3.Méthode de placement des pôles : 73
III.4. Emplacement optimal des PSSs: 74
III.5.Résultat et discussion : 75
III.5.1.Exécution du système étudié
avec PSS : 75
III.5.2.Etude comparative entre la mise en oeuvre du
système étudié avec, et sans PSS : 77
III.6. Conclusion : 81
Chapitre4 : PSS a basé sur la logique floue
IV.1.Introduction : 83
IV.2.Apparition de la logique floue : 84
IV.3.Utilisation de la logique floue pour le contrôle :
84
IV.4.La théorie des ensemble floue : 84
IV.4.1.Notion d'appartenance partielle : 84
IV.4.2.Fonction d'appartenance (FA) : 85
IV.4.2.1.Fuzzification "Degré d'appartenance" : 88
IV.4.3.Opérateurs logiques flous : 88
IV.4.3.1.Choix des opérateurs : 89
IV.4.4.Règles floues : 90
xii
Sommaire
IV.4.4.1.La logique floue et l'intelligence artificielle : 12
IV.4.4.2.Mécanisme d'inférence de Mamdani : 10
IV.4.4.3.Défuzzification : 13
IV.4.4.4.Règles « libres » et « en tableau
» : 10
IV.5.Contrôleur flou : 11
IV.5.1.Les différentes étapes de la commande floue
: 11
IV. 6.PSS basés sur la logique floue : 11
IV.6.1. Sélection de variables d'entrée et de
sortie : 11
IV.6.2.Fonction d'appartenance : 11
IV.6.3. La base de règles floues : 822
IV.6.4.Défuzzification : 828
IV.6.5.la mise en oeuvre de la logique floue : 820
IV.7.Résultat et discision : 822
IV.7.1.Exécution du système avec les
différents fonctions d'appartenances : 822
IV.7.2.Étude comparative entre la mise en oeuvre du
système aux différentes cas : 821
:Stabilisation d'un Système
multi-machines
IV 8.Conclusion : 888
Chapitre5
V.1.Introduction : 882
V.2. Description du réseau étudié : 881
V.3. Amortissement des oscillatoires inter-régions:
881
V.4.. Intérêt de l'amortissement des oscillations
inter-régions: 880
V.5. Résultats de simulation et discision : 880
V.5.1. Système sans stabilisateur : 881
V.5.2. Evaluation de performance et comparaison : 881
V.5.2.1. Résultats de simulation: 802
V.6.Conclusion : 801
Conclusion générale : 128
Bibliographie: 130
XIII
Résumé
Résumé :
Un système électro énergique
consisté d'une machine synchrone lié par une ligne de
transmission à un jeu de barre infini est une source d'énergie
électrique souvent soumis à de petites perturbations lors de
variations brusques de la charge ou lors de l'occurrence de défauts sur
le réseau. Le problème de stabilité des systèmes
électro- énergique sont principalement ceux des machines
synchrones fournissant la quasi-totalité de cette énergie
Le régulateur automatique de tension AVR et le
régulateur de vitesse ou Gouverneur sont les deux compensations
conventionnelles des réseaux électriques. Ceux deux
régulateurs sont conçus Séparément pour
différent plages de fréquences. Ils fonctionnent donc de
façon non cordonnées. La sortie du régulateur de tension
dépend uniquement de la tension terminale et agit sur l'excitation du
générateur tandis que celle du Gouverneur est fonction uniquement
de la vitesse de rotor et actionne indirectement l'ouverture du vannage de la
turbine. Il est désormais indésirable que cette structure est
incapable d'assurer de façon efficace la stabilité de
réseau. Elle ne pas amortir les oscillations interzones.
Le AVR et Gouverneur ne peuvent donc pas garantir
à eux seuls le bon fonctionnent des réseaux électriques
sans l'aide d'un stabilisateur. Ce dernier appelé stabilisateur de
puissance PSS ajoute un amortissement supplémentaire à
traverse l'excitions. Cette nouvelle structure a une meilleure performance et
amortit relativement bien les oscillations locales et interzones.
La techniques de détermination de paramètres de
PSS et le caractère linéaire de ce dernier ne
garantissent pas une bonne performance sur toute la plage de fonctionnent du
réseau.
Plusieurs travaux ont alors été proposés
en vue d'accroître la performance de l'ensemble AVR, Gouverneur
et PSS. Ils consistent à l'amélioration de la conception
du PSS par l'application des techniques modernes.
L'objectif de ce travail est de proposer des méthodes
robustes pour améliorer la stabilité d'un système
électro-énergétique à l'aide des :
? Stabilisateurs de puissance conventionnel « PSS
». ? Logique floue « FUZZY ».
xiv
Introduction générale
Introduction générale :
Depuis une vingtaine d'années, les systèmes
électro-énergétiques doivent faire face à des
défis très importants. La libération du marché de
l'électricité crée des scénarios de fonctionnement
beaucoup plus complexes que par le passé. L'augmentation permanente de
la dépendance électrique de la société moderne
implique un fonctionnement des systèmes
électro-énergétiques à 100% de leur capacité
et une sûreté maximale. En outre, la qualité de la
puissance électrique est devenue actuellement un grand souci pour les
consommateurs et les fournisseurs. Par conséquent, des critères
rigoureux de développement et de fonctionnement sont de plus en plus
exigés.
Dans ces conditions, la stabilité des systèmes
électro-énergétiques devient une des préoccupations
majeures pour les fournisseurs d'électricité. Ces systèmes
doivent rester stables pour toutes les petites variations au voisinage des
points de fonctionnement ainsi que pour des conditions sévères.
Les nouvelles méthodes et les nouvelles technologies permettant
d'améliorer la stabilité des systèmes font par
conséquent l'objet de travaux de recherche extrêmement
important.
Plusieurs des méthodes modernes ont déjà
fait l'objet d'applications industrielles dans des domaines de pointe tels que
l'aéronautique et la robotique. On est alors en droit de s'interroger
sur leur efficacité quant au problème de la conception des
régulateurs de tension et de vitesse qui assurent la stabilité
des réseaux électriques.
Le Régulateur Automatique de Tension (AVR) et le
Régulateur de Vitesse ou Gouverneur sont caractérisées par
un échange faiblement amorti de puissance électrique entre deux
ou plusieurs zones du réseau.
Le AVR et le Gouverneur ne peuvent donc pas garantir
à eux seuls le bon fonctionnement des réseaux électriques
sans l'aide d'un stabilisateur. Ce dernier communément appelé
Stabilisateur de Réseaux Électriques (PSS) ajoute un
amortissement supplémentaire à travers l'excitation du
générateur à partir de l'erreur de vitesse ou de la
variation de la puissance électrique. Il ajoute donc une boucle
indépendante supplémentaire.
Cette nouvelle structure a une meilleure performance et
amortit relativement bien les oscillations locales et inter zones. Cependant.
Le PSS et le AVR agissent simultanément, de
façon indépendante et non coordonnée sur l'excitation du
générateur. Un compromis est donc effectué afin d'assurer
le bon fonctionnement de l'ensemble. Ainsi. Avec l'ajout du PSS, on
note généralement une certaine détérioration de la
qualité de la régulation de tension.
xv
Introduction générale
Une autre méthode de PSS basé sur la
logique floue. Ceci est due à la possibilité d'introduire des
connaissances exprimées sous forme de règle d'inférence
pour déterminer les fonctions d'appartenances, on se basent sur
l'expérience humaine dans le domaine. En particulier, l'application de
théorie des ensembles flous dans la commande des processus. Par
simulation, nous allons visualiser et comparer le temps d'atténuation
des oscillations liées aux systèmes électrique (machine
synchrone reliées à un réseau infini) quand ils sont
soumis à une perturbation, donc voir l'effet de l'intelligence
artificielle sur le système par rapport au conventionnel,
c'est-à-dire l'amélioration davantage de la stabilité du
système de puissance.
Le PSS et logique floue sont toujours
considérés comme un moyen efficace pour l'amortissement des modes
électromécaniques locaux, mais en même temps son rôle
dans l'amortissement des modes interrégionaux reste toujours
considéré comme faible. L'objectif de notre travail est ainsi
d'assurer un amortissement maximum des modes interrégionaux aussi bien
que des modes locaux. Pour atteindre cet objectif, nous proposons un
réglage optimal des PSS et logique floue « FUZZY
». Ceci permet d'assurer un amortissement satisfaisant des
oscillations rotoriques et de garantir la stabilité globale du
système pour différents points de
fonctionnement[1].
Notre thème est composé de cinq chapitres :
? Le premier chapitre donne, au début, les
différentes définitions de base puis l'étude d'un
système électro-énergétique constitué d'une
machine synchrone liée par ligne de transmission à un jeu de
barres infini, les différents types de stabilité et introduction
aux contrôleurs PSS, et leurs nouveaux types, dans la fin du
chapitre on a analysé de la performance et critères de bonne
régulation.
? Dans le deuxième chapitre, nous avons
présenté la modélisation du système
électro-énergétique et modèle de PSS(Power
System Stabilizer) pour les études de la stabilité angulaire.
? Le troisième chapitre concerne une
présentation théorique et la fonctionnement du stabilisateur
PSS ,En outre, Le réglage de paramètres des PSSs
et leurs emplacements sont des facteurs critiques pour pouvoir assurer
convenablement le bon fonctionnement des PSSs.
? Le quatrième chapitre concerne une
présentation théorique de la logique floue qui est une
méthode basé sous forme de règles d'inférence pour
assurer une bonne amélioration de la stabilité de système
électro-énergétique.
Introduction générale
? Enfin, le cinquième chapitre, nous abordâmes
à problème de la stabilité transitoire dans les
systèmes multi-machines par méthodes PSS et logique
floue « FUZZY », et on conclure qui le FUZZY est
meilleur méthode pour assurer une bonne amélioration de la
stabilité de système multi-machines.
xvi

Chapitre 1
Stabilisation d'un Système
Électro-énergétique
CHAPITRE I Stabilisation d'un Système
Électro-énergétique
18
I.1.Introduction :
Les systèmes électriques ont connu ces
dernières décennies des développements
considérables. Leur fonctionnement et leur exploitation sont devenus de
plus en plus complexes. La stabilité d'un système
électro-énergétique est un facteur essentiel pour
préserver le matériel et assurer la continuité du service.
Le régime de fonctionnement doit rester stable en marche normale ainsi
que pendant les périodes troubles dues aux modifications
aléatoires dans la topologie du système. Ces modifications
peuvent être des charges, des défauts, ...etc.
Les perturbations peuvent entraîner la rupture de
synchronisme entre une machine et le réseau , ou des oscillations entre
machine. Les perturbations sont à l'origine de l'apparition d'une
différence entre la puissance mécanique (la production) et la
puissance électrique (la consommation) .
L'écart en termes de puissance va se traduire par une
modification de la vitesse de rotation de l'alternateur ou en d'autres termes
par des variations de sa vitesse autour de la vitesse de synchronisme. Dans ce
cas, nous pouvons faire intervenir les stabilisateurs après
l'élimination de la perturbation et le réseau sera
stabilisé. Nous pouvons définir trois types de stabilité :
la stabilité dynamique, la stabilité statique et la
stabilité transitoire[1].
Dans ce chapitre, nous voulons traiter les titres suivants :
? La définition de stabilité des réseaux
électriques.
? Les différents types de stabilité.
? Introduction aux contrôleurs PSS, et leurs
nouveaux types. ? Analyse de la performance et critères de bonne
régulation.
CHAPITRE I Stabilisation d'un Système
Électro-énergétique
19
I.2. Définitions:
I.2.1. Système
électro-énergétique:
On appelle un système
électro-énergétique un ensemble d'installations
électriques destinées à produire, transporter et à
la fois distribuer l'énergie électrique aux consommateurs.
I.2.2. Réseau infini:
Un réseau est dit infini ou de grande puissance lorsque
sa tension et sa fréquence sont fixes et une perturbation sur une
machine n'affecte pas le réseau.
I.2.3. Synchronisme:
On dit qu'une machine fonctionne en synchronisme, si sa
fréquence est égale à la fréquence de
réseau. On dit qu'un système fonctionne en synchronisme, si
toutes les machines reliées à ce réseau ont la même
fréquence du réseau[1].
I.2.4. Stabilité d'un système
électro-énergétique :
Pendant des années, des recherches diverses et
complexes étaient effectuées pour comprendre les problèmes
de stabilité des systèmes de puissance. Ainsi de nombreuses
définitions de la stabilité de systèmes de puissance
étaient proposées en insistant sur les divers aspects qui
reflètent la manifestation de l'état stable de système. La
définition la plus récente, que nous adopterons, est le
résultat d'un groupe de travail conjoint
IEEE/CIGRE[2].
« La stabilité d'un système de
puissance est la capacité d'un système d'énergie
électrique, pour une condition de fonctionnement initiale donnée,
de retrouver le même état ou un autre état
d'équilibre âpres avoir subi une perturbation physique, en gardant
la plupart des variables de système dans leurs limites, de sorte que le
système entier reste pratiquement intact ».
Ainsi un système de puissance possédant un
état d'équilibre est considéré comme stable, si
suite a une perturbation, le système peut encore retrouver une position
d'équilibre. Le système est également
considéré comme stable s'il tend vers une autre position
d'équilibre située dans la proximité du point
d'équilibre initial[3].
I.3.Description générale du
système électro-énergétique étudie :
Un réseau SMIB (Single Machine Infinity Bus System) est
constitué d'une machine synchrone qui alimente un réseau
électrique de puissance infinie (c'est-à-dire dont la puissance
est largement supérieure à celle de la génératrice
synchrone) au travers de lignes et d'un
CHAPITRE I Stabilisation d'un Système
Électro-énergétique
20
transformateur. La machine synchrone est modélisée
par une force électromotrice constante E derrière une
réactance . Le noeud infini est un point où la tension est
constante et fixée en
module et en phase (inertie très grande des autres
machines).
La figure(I.1) représente un système standard
IEEE type SMIB (Single Machine Infinity Bus System) avec la
commande d'excitation du Générateur Synchrone Puissant
(GSP) [4].
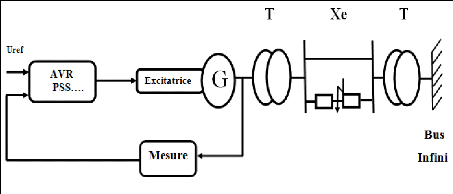
Figure. I.1. Système
standard IEEE type SMIB avec commande d'excitation
du générateur synchrone puissant.
1.4.Les causes d'instabilité[5]:
Les causes sont diverse et variés dans les
différents blackout. Ces causes peuvent provoquer directement le
blackout ou aggraver la condition du système qui pourra mener
indirectement au blackout.
? Le court-circuit :un court-circuit provoque un
déséquilibre important entre le couple moteur et le couple
résistant.
? La surcharge :à charge nominale, les alternateurs ont
un faible couple synchronisant car la valeur de l'angle interne se rapproche de
90°.Si l'angle dépasse 90° le système devient
instable.
? La défaillance d'une protection.
Ces trois causes sont des causes initiaux, il ya des autres
causes comme la perte d'un générateur, le vieillissement des
équipements, l'insuffisance de réserve de puissance
réactive, peuvent aussi parfois être causses initiales.
Exemples :
CHAPITRE I Stabilisation d'un Système
Électro-énergétique
21
Panne de courant nord américaine de 2003 :
Son origine provient essentiellement de l'arrêt de
plusieurs centrales électriques les 12 et 13 aout, ainsi que la coupure
de plusieurs ligne de 345V dans l'Ohio, par négligence de la
société First Energie. Par effet de cascade en cette
période de fort consommation, la panne s'étend en quelque heures
sur 256 centrales électriques.
Panne suisse du 22 juin 2005 sur le réseau
ferroviaire : Un court-circuit s'est produit à 17h08 sur
une ligne de transport de CFF entre Amsteg et Rotkreuz , ce qui à
conduit au décrochement de plusieurs centrales électriques et a
provoqué une réaction en chaine, ont annoncé jeudi 23 juin
les CFF.
Blackout en Algérie le 03 février
2003 à 17h04 : Un manque générale de tension
a touché le réseau interconnecté nord du système
électrique algérien, entrainant la coupure de l'alimentation de
l'ensemble de la clientèle raccordée au réseau Nord du
pays, durant une période comprise en 12 minutes et 4 heures 30 minutes.
Cet incident avait pour causes une succession d'évènements avec
à l'origine le déclenchement de deux groupes turbines à
gaze à 350MW par minimum de pression gaz(disfonctionnement du poste
gaz).
L'incident s'est produit au moment de la demande maximale de
charge en points soir, moment où le système production-transport
fonctionnait à sa limite et sans réserve de production avec des
transits maximums sur certaines ligne de transport.
I.5. Les différents types de stabilité
:
Pour analyser et résoudre les problèmes
d'instabilité dans les systèmes
électro-énergétique, il est indispensable de regrouper les
différents groupes de stabilité. Cette classification de la
stabilité est basée sur les considérations
suivantes[6]:
· la nature physique de l'instabilité
résultante.
· l'amplitude de la perturbation.
· la plage de temps nécessaire pour assurer la
stabilité.
· les dispositifs et les processus nécessaires pour
assurer la stabilité.
Habituellement, la stabilité est divisée en trois
groupes, a savoir[3]:
· la stabilité de l'angle de rotor.
· la stabilité de tension.
· la stabilité de fréquence.
La figure(I.2) présente ces principales
catégories de stabilité d'un système de puissance et leurs
sous-catégories.
CHAPITRE I Stabilisation d'un Système
Électro-énergétique
Traditionnellement, le problème de la stabilité
a été de maintenir le fonctionnement synchrone des
générateurs du système. Ainsi, pour avoir une production
satisfaisante de la puissance électrique, toutes les machines synchrones
du système doivent fonctionner en synchronisme. Cet aspect de la
stabilité est influencé par les dynamiques de l'angle de rotor de
générateur et de la relation puissance-angle.
L'instabilité peut également avoir lieu sans
perte de synchronisme. Par exemple, un système composé d'un
générateur alimentant un moteur à induction peut devenir
instable en raison de l'effondrement de la tension de la charge. Dans ce cas,
c'est la stabilité et le contrôle de la tension qui créent
le problème, plutôt que le maintien du synchronisme. Ce type
d'instabilité peut aussi se produire dans le cas de charges couvrant une
vaste zone dans un grand système.
Un autre type d'instabilité peut avoir lieu : dans
l'éventualité d'un fort écart entre la puissance de la
charge et la puissance de la génération, les contrôleurs
principaux des générateurs et de la charge deviennent importants.
S'ils ne sont pas bien coordonnés, il est possible que la
fréquence du réseau devienne instable. Des unités de
générations et/ou de charges peuvent finalement être
déclenchées en entraînant une panne du système. Dans
ce cas, les générateurs peuvent rester en synchronisme mais le
système devient instable[3].
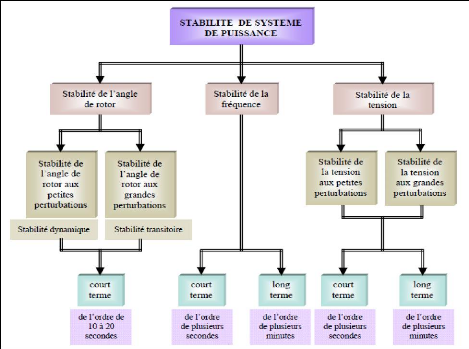
Figure I.2. Classification des
différents types de la stabilité de système
électro-énergétique.
22
CHAPITRE I Stabilisation d'un Système
Électro-énergétique
23
CHAPITRE I Stabilisation d'un Système
Électro-énergétique
I.5.1.La stabilité de l'angle de rotor :
Etant donne que la génération de puissance
électrique dépend principalement des machines synchrones, un
aspect important est le fonctionnement de ces générateurs au
synchronisme[7]. Au synchronisme, les rotors de chaque machine
synchrone du système tournent à la même vitesse
électrique et les angles entre les champs magnétiques, rotoriques
et statoriques, restent constants.
En fonctionnement nominal équilibre, la puissance
électrique fournie par le générateur aux charges est
égale, en négligeant les pertes, a la puissance mécanique
fournie par la turbine. Quand le système est perturbe, la puissance
électrique de la machine varie rapidement, mais la variation de
puissance mécanique fournie à la machine est relativement lente.
En raison de cette différence de vitesse de réponse, un
écart temporaire d'équilibre de puissance a lieu. Par
conséquent, ce déséquilibre de puissance entraine une
variation des couples agissant sur le rotor. Ceci entraine une
accélération ou décélération du rotor selon
le sens du déséquilibre, voire un glissement du champ de
synchronisme en entrainant une perte de synchronisme du
générateur avec le reste du système[8].
Si l'équilibre de puissance n'est pas rétabli, la machine est
mise hors service par une protection de survitesse ou de perte de synchronisme,
et la stabilité du Système est mise en danger.
Suite à une perturbation au système, le facteur
principal qui détermine l'évolution de l'état du
système est l'écart entre les angles de rotor. (Les angles sont
mesures par rapport à une référence tournante au
synchronisme). Nous pouvons dire que les angles de rotor d'un système de
puissance peuvent évaluer selon deux scenarios[9]:
? Soit, les angles de rotor s'accroissent ensemble et
oscillent à l'unisson. Ils peuvent éventuellement atteindre de
nouvelles valeurs stables. Tant que les écarts entre les angles de rotor
restent constants, le Système reste stable et il demeure au
synchronisme.
? Soit, un ou plusieurs angles de rotor s'accroissent plus
rapidement que les autres. Alors, les écarts entre les angles de rotor
divergent dans le temps. Le système devient par conséquent
instable et il perd le synchronisme.
Suivant l'amplitude de la perturbation, nous pouvons
caractériser la stabilité de l'angle de Rotor en deux
sous-catégories :
I.5.1.1. Stabilité angulaire aux grandes
perturbations (stabilité transitoire) :
« Elle concerne la capacité du
système de puissance de maintenir le synchronisme après avoir
subi une perturbation sévère transitoire tel un court-circuit sur
une ligne de transmission ou
24
une perte d'une partie importante de la charge ou de la
génération. La réponse du système implique de
grandes variations des angles de rotor. Elle dépend de la relation
non-linéaire couples- angles ».
? ? ??
La stabilité transitoire dépend non seulement de
l'amplitude des perturbations et du point de fonctionnement initial mais elle
dépend également des caractéristiques dynamiques du
système. Elle se manifeste à court terme sous forme d'un
écart croissant de façon apériodique de certains angles de
rotor. Si l'instabilité se manifeste directement suite à la
perturbation (plus précisément dans la première seconde
qui suit l'élimination du défaut), elle est appelée
instabilité de première oscillation (First Swing Instability),
(cas 1, figure (I.3)), et elle s'étend sur 3 à 5 secondes.
L'instabilité transitoire peut aussi se manifester
autrement. Elle peut résulter de la superposition des effets de
plusieurs modes d'oscillation lents excités par la perturbation,
provoquant ainsi une variation importante de l'angle de rotor au-delà de
la première oscillation (instabilité de multi oscillations), (cas
2, figure (I.3)). La gamme de temps associée va de 10 à 20
secondes[3].
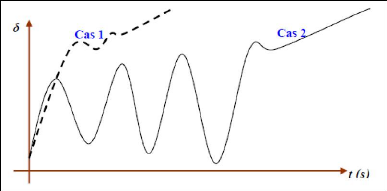
Figure I.3. Variation d'angle de
rotor.
Cas 1 : instabilité de première
oscillation. Cas 2 : instabilité de
multi-oscillations.
Le concept de stabilité transitoire peut
être expliqué par une approche graphique simple, à
savoir
le critère d'égalité des aires (Equal Area
Criterion). Cette approche regroupe l'équation du
mouvement et la courbe traditionnelle représentant la
relation entre la puissance produite
par le générateur et
l'angle de rotor [8].
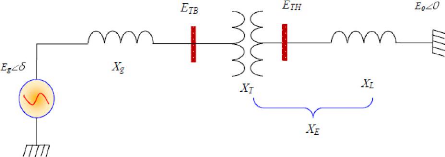
Pour expliquer cette approche, nous prenons un système
de puissance simple constitué d'un générateur synchrone
connecté à un jeu de barre infini via une ligne de transmission,
figure (I.4)
[3]. Le générateur est
modélisé par une source de tension idéale en série
avec une réactance
Xg
(modèle classique). La ligne et le transformateur sont
représentés par la réactance .
CHAPITRE I Stabilisation d'un Système
Électro-énergétique
25
Figure 1.4. Machine synchrone
connectée à un jeu de barre infini. a. Relation
puissance-angle de rotor :
Dans l'état équilibré, la puissance produite
par le générateur est donnée par l'équation
suivante :
(I.1)
Où, , l'angle de rotor (dit ici, l'angle de puissance),
est le déphasage entre la tension interne du
générateur et la tension du jeu de barre infini
.L'équation (I.1) est représentée
graphiquement à la figure (I.5).
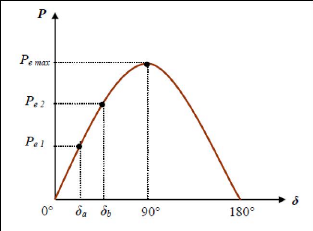
Figure I.5. Relation puissance-
angle de rotor.
Lors de l'équilibre, la puissance électrique est
égale à la puissance mécanique appliquée
CHAPITRE I Stabilisation d'un Système
Électro-énergétique
26
pour l'angle correspondant .
Un brusque changement sur la charge du générateur
entraîne une variation de la puissance
mécanique, et par conséquent de la puissance
électrique, par exemple de à , figure (I.5).
Le rotor va donc accélérer de sorte que l'angle de
puissance augmente, de à , pour pouvoir
fournir une puissance supplémentaire à la charge.
Cependant, l'accélération du rotor ne peut pas
s'arrêter instantanément. Ainsi, bien que la
puissance développée pour l'angle soit suffisante
pour la charge, le rotor va dépasser l'angle
jusqu'à ce qu'un couple opposé suffisant soit
développé pour arrêter cette
accélération. L'énergie supplémentaire va
entraîner le ralentissement du rotor et la diminution de l'angle de
puissance. Suivant l'inertie et l'amortissement du système, les
oscillations de l'angle de rotor résultant vont ou s'amortir, et la
machine restera stable (cas 1, figure (I.6)), ou diverger, et la machine
deviendra instable en perdant le synchronisme avec le système (cas 2,
figure (I.6)) [3].
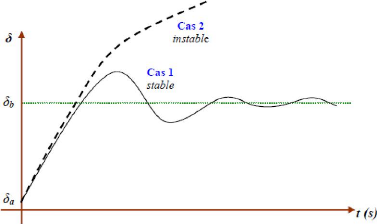
Figure I.6. Variation d'angle de
rotor.
b. Critère d'égalité des aires
:
Considérons un défaut, tel un défaut sur
la ligne de transmission, appliqué au système
précédent disparaissant après quelques périodes du
système. Ceci va modifier l'écoulement de puissance et,
par conséquent, l'angle de rotor ä.
Retraçons la courbe en tenant compte de ce défaut,
figure (I.7). En dessous de cette courbe, nous pouvons
considérer deux zones[10]:
27
CHAPITRE I Stabilisation d'un Système
Électro-énergétique
d28 Co
?
dt2 2H
(Pm Pe)
? La première zone (zone , zone
d'accélération) se situe au-dessous de la droite
horizontale correspondante au point de fonctionnement initial
(la droite de charge). Elle est limitée par les deux angles de rotor (
et ) correspondants à l'apparition et à la disparition de
défaut. Cette zone est caractérisée par l'énergie
cinétique stockée par le
rotor du fait de son accélération : .
? La deuxième zone (zone , zone de
décélération), qui commence après
l'élimination du défaut, se situe en dessus de la droite de
charge : elle est caractérisée par la
décélération
du rotor : .
Si le rotor peut rendre dans la zone toute l'énergie
cinétique acquise durant la première phase,
le générateur va retrouver sa stabilité.
Mais si la zone ne permet pas de restituer toute
l'énergie cinétique, la
décélération du rotor va continuer jusqu'à la perte
de synchronisme.
d
2 .
d
La relation entre les aires des zones ( et ) et la
stabilité transitoire peut être
mathématiquement
expliquée comme suit :
Rappelons tout d'abord que l'équation du mouvement de
générateur est donnée par la relation suivante :
0
?
(I.2)
: la constante d'inertie.
: la vitesse de synchronisme.
: la puissance mécanique fournie au
générateur. : la puissance électrique du
générateur.
En multipliant cette équation par ,en intégrant
par rapport au temps et en faisant un
2 s 2
? d s ? ? 0
?? ? ? ? ? ?
cte ? P P ? . d
s
m e
dt ?H
?2
changement de variables, nous obtenons :
s0 (I.3)
?0
: l'angle de rotor, initial, à l'instant de l'application
de défaut. : l'angle de rotor à la fin de la période
transitoire.
CHAPITRE I Stabilisation d'un Système
Électro-énergétique
28
Ainsi, lorsque: la constant
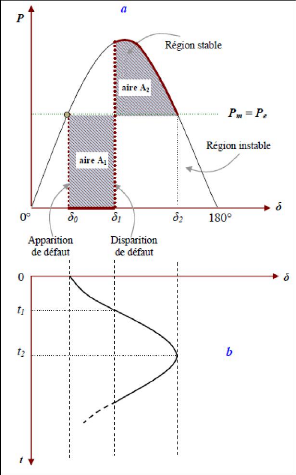
Figure I.7. Courbes (a
: puissance-angle) et (b : variation d'angle de
rotor) du générateur suite à un défaut de
transmission.
d? ? 0.
Après l'élimination du défaut, l'angle
ä va s'arrêter de varier et le générateur va
retrouver sa
dt
vitesse de synchronisme, lorsque
( P - P ) .
d = 0
m e
Par conséquent, l'équation (91) s'écrit
comme suit :
(I.5) CHAPITRE I Stabilisation d'un Système
Électro-énergétique
29
Où : est l'angle de rotor à l'instant de
l'élimination de défaut.
(I.6)
Ainsi, la limite de la restauration de la stabilité
transitoire se traduit mathématiquement par
l'égalité des aires de la zone A1 et de la zone
: cette condition est appelée critère d'égalité
des
aires (Equal Area Criterion).
Par conséquent, les contrôleurs de la
stabilité transitoire peuvent améliorer la stabilité soit
en diminuant la zone d'accélération (zone ), soit en augmentant
la zone de décélération (zone)
Cela peut être réalisé soit en augmentant
la puissance électrique, soit en diminuant la puissance
mécanique.
En outre, un système statique d'excitation avec une
tension maximale élevée et d'un régulateur de tension
possédant une action "puissante" et rapide représente un moyen
très efficace et économique pour assurer la stabilité
transitoire[11]. Enfin, une amélioration signifiante de
la stabilité transitoire est obtenue avec des systèmes
très rapides de détection des défauts et de
disjoncteurs.
I.5.1.2. Stabilité angulaire aux petites
perturbations (stabilité dynamique) :
« Elle se définie par la capacité du
système de puissance de maintenir le synchronisme en présence des
petites perturbations. L'instabilité résultante se manifeste sous
forme d'un écart croissant, oscillatoire ou non-oscillatoire, entre les
angles de rotor »
La stabilité aux petites perturbations dépend du
point de fonctionnement d'équilibre initial du système ainsi que
des caractéristiques dynamiques du système. Contrairement
à la stabilité transitoire, elle ne dépend pas de niveaux
de perturbations, car celles-ci sont arbitraires et infiniment petites
[7].
La relation puissance-angle (I.1) est une relation
non-linéaire en sinus. Mais pour des petites perturbations, la variation
de puissance reste approximativement proportionnelle à la variation de
l'angle ä. Des exemples typiques des petites perturbations
peuvent être donnés par des variations de niveau de 10 % de la
puissance mécanique appliquée à une machine du
système ou sur sa charge,... [9].
CHAPITRE I Stabilisation d'un Système
Électro-énergétique
30
La stabilité transitoire, comme nous l'avons vu, est
associée à la présence d'un couple synchronisant
suffisant, immédiatement après la perturbation. Si le
système est transitoirement stable, la stabilité aux petites
perturbations sera associée à la présence d'un couple
d'amortissement à la suite de la première oscillation. Si ce
couple est suffisant, les oscillations s'amortiront (amortissement positif).
Par ailleurs, si l'amortissement n'est pas suffisant, les oscillations vont
continuer, ou même elles vont augmenter (amortissement négatif
c.-à-d. manque de couple d'amortissement).
La perte de synchronisme peut avoir lieu entre une machine et
le reste du système (provoquant une instabilité locale), ou bien
entre des groupes des machines, dans lesquels chaque groupe peut garder son
synchronisme (désignant une instabilité globale).
L'instabilité aux petites perturbations se manifeste
à court terme, la gamme de temps associée étant de l'ordre
de 10 à 20 secondes.
I.5.2. La stabilité de tension :
« La stabilité de tension, par
définition, se rapporte à la capacité d'un système
de puissance, pour une condition de fonctionnement initiale donnée, de
maintenir des valeurs de tensions acceptables à tous les noeuds du
système après avoir subi une perturbation. La stabilité de
tension dépend donc de la capacité de maintenir/restaurer
l'équilibre entre la demande de la charge et la fourniture de la
puissance à la charge. L'instabilité résultante se produit
très souvent sous forme de décroissance progressive de tensions
à quelques noeuds ».
Suite à une perturbation, certaines charges ont
tendance à restaurer la puissance consommée avant perturbation.
C'est le cas des moteurs asynchrones, des charges dont la tension est
contrôlée par un régleur en charge automatique, des
chauffages électriques commandé par thermostat, ... . Il existe
une puissance maximale transmissible entre les centres de production et ceux de
consommation. Cette puissance maximale disponible dépend non seulement
des caractéristiques du réseau de transport (distances
électriques) mais également de celles des
générateurs (possibilité de maintenir la tension
grâce à une réserve de puissance réactive
suffisante). Par conséquent, si la puissance que les charges tendent
à restaurer devient supérieure à la puissance maximale
transmissible, le mécanisme de restauration des charges va contraindre
le réseau haute tension en augmentant la puissance réactive
consommée et en faisant donc baisser progressivement la tension du
réseau jusqu'à des valeurs inacceptables .
Généralement, l'instabilité de tension se produit
lorsqu'une perturbation entraîne une augmentation de puissance
CHAPITRE I Stabilisation d'un Système
Électro-énergétique
31
réactive demandée au-delà de la puissance
réactive possible. Plusieurs changements dans le système de
puissance peuvent contribuer à l'instabilité de tension, ce sont
par exemple :
· une augmentation de charge.
· des générateurs, des condensateurs
synchrones, ou des SVCs (Static Var Compensator systèmes) qui
atteignent les limites de puissance réactive.
· une tentative d'un régleur automatique en
charge ayant échouée de restaurer la tension de charge à
son niveau initial avant la perturbation.
· une panne de générateur, une perte d'une
charge importante ou un déclenchement de ligne.
· une perte d'une source de puissance réactive
(condensateurs, machines synchrones,...).
La plupart de ces changements ont des effets significatifs
sur la production, la consommation et la transmission de puissance
réactive, ainsi sur la stabilité de tension. Par
conséquent, des mesures peuvent être utilisées pour
améliorer la stabilité de tension, tels [12]:
· un contrôle automatique des condensateurs
shunts.
· un blocage des régleurs en charge automatique.
· une nouvelle répartition de la
génération.
· une replanification du fonctionnement des
générateurs et des noeuds de commande.
· une régulation de tension secondaire.
· un plan de délestage.
La gamme de temps de l'instabilité de tension
s'étend de quelques secondes à plusieurs minutes. Ainsi,
l'instabilité de tension peut être considérée comme
un phénomène à court terme (de l'ordre de plusieurs
secondes) ou, dans l'autre cas limite, comme un phénomène
à long terme (de l'ordre de plusieurs minutes).
Pour l'instabilité de tension à court terme
l'effondrement de tension se produit immédiatement après la
perturbation. Dans ce type d'instabilité, les charges et les
dispositifs, qui ont des caractéristiques spéciales de puissance
réactive tels les moteurs asynchrones sont souvent impliqués. Les
moteurs asynchrones consomment, juste après la perturbation, beaucoup de
puissance réactive pour assurer leur stabilité vis-à-vis
leurs charge. D'autres éléments peuvent aussi participer à
cette instabilité : les charges commandées
électroniquement, les convertisseurs HVDC ,... .
L'instabilité de tension à long terme se
développe lors d'un manque graduel de puissance réactive d'un
noeud ou une partie du système. Elle implique, quant à elle, des
équipements ayant
CHAPITRE I Stabilisation d'un Système
Électro-énergétique
32
CHAPITRE I Stabilisation d'un Système
Électro-énergétique
une action plus lente tels les régleurs en charge
automatique, les charges commandées thermostatiquement,... .
Il est aussi important de noter que l'instabilité de
tension ne se produit pas toujours toute seule. Souvent, l'instabilité
de tension et l'instabilité de l'angle de rotor se produisent ensemble,
l'une pouvant entraîner l'autre.
Enfin, la stabilité de tension peut être
classée en deux catégories ; la stabilité de tension aux
grandes perturbations et aux petites perturbations :
? Stabilité de tension aux grandes perturbations. Le
souci dans ce cas est de maintenir des tensions normales aux noeuds de
réseau électrique après une grande perturbation. La
stabilité est déterminée ici par les
caractéristiques du système et de charge, et par les interactions
entre les différents dispositifs de commande de tension dans le
système [13].
? Stabilité de tension aux petites perturbations. Dans
ce cas, les caractéristiques de la charge et des dispositifs de commande
déterminent la capacité du système à maintenir les
tensions équilibrées.
I.5.3. La stabilité de fréquence :
« La stabilité de la fréquence d'un
système de puissance se définit par la capacité du
système de maintenir sa fréquence proche de la valeur nominale
suite à une perturbation sévère menant par
conséquent à un important déséquilibre, entre les
puissances produite et consommée ».
Le maintien de la fréquence à une valeur
nominale dans un système de puissance est lié à
l'équilibre global entre les puissances actives produites et
consommées (y compris les pertes). Autrement dit, suite à
certaines perturbations, l'équilibre global des puissances produite
consommée peut être déséquilibré : ce
déséquilibre entraîne alors une variation de
fréquence. L'énergie cinétique stockée dans les
pièces tournantes des machines synchrones et autres machines
électriques tournantes peut éventuellement compenser ce
déséquilibre. Si ce dernier n'est pas trop grand, les
générateurs participant à la commande de fréquence
régleront la puissance active fournie à travers leurs
réglages secondaires fréquence-puissance et ramèneront
ainsi l'écart de fréquence à des valeurs acceptables. Par
ailleurs, si le déséquilibre est trop grand, l'écart de
fréquence sera significatif avec des graves conséquences
(effondrement complet du système), [14].
Lorsque la fréquence varie, les caractéristiques
de temps des processus et des différents dispositifs activés vont
varier de quelques secondes à quelques minutes. La stabilité de
fréquence peut donc être classifiée en
phénomènes à court terme et à long terme.
33
Dans un grand système de puissance et suite à un
incident sévère et, par la suite, à l'action de
protections (par exemple, un déclenchement de plusieurs lignes de
transmission), l'instabilité de la fréquence est
généralement associée à l'îlotage où
un scénario typique peut avoir lieu. Un ou plusieurs sous-réseaux
se retrouvent isolés du reste du système. Les
générateurs de chaque sous-réseau résultant
essayent de garder le synchronisme entre eux, mais la réserve tournante
est nettement insuffisante pour faire face à la charge connectée
au sous-réseau. La fréquence décroît ainsi
rapidement et l'instabilité produite est donc à court terme.
L'instabilité de fréquence peut également
se manifester à long terme, lorsqu'elle provient d'une mauvaise
réponse en puissance des centrales ou d'une mauvaise coordination entre
des régulations et protections [7].
I.6.Introduction aux contrôleurs:
Le contrôle supplémentaire auxiliaire du
système d'excitation AVR, vaguement connu sous le nom du
Stabilisateur type PSS(Power System Stabiliser) est devenu le moyen le
plus répandu pour l'amélioration de l'amortissement des
oscillations basse fréquence dans les réseaux électriques
(i.e. l'amélioration de stabilité dynamique et statique).
La puissance de sortie d'un générateur est
déterminée par le couple mécanique. Cependant cette
dernière peut varier par l'action du champ d'excitation de
l'alternateur. Le PSS étant ajoute, il détecte la
variation de la puissance de sortie électrique et contrôle
l'excitation de manière a amortir rapidement les oscillations de
puissance[15].
I.6.1. Nouveaux types de PSS:
Avec le développement de la technologie des semi
conducteurs, de nouveaux algorithmes sont maintenant implantes, et ceci pour
remplacer les PSSs analogiques (classique or conventionnel) par des
dispositifs a commande intelligente, a titre d'exemple[15]:
? Remplacement du PSS par un réseau de
neurones artificiel (RNA).
? Remplacement du PSS par un contrôleur
flou.
? PSS optimise par l'algorithme
génétique.
? PSS optimise par essaims de particules (swarm
intelligence based PSS).
? PSS hybrides.
I.7. Analyse de la performance et critères de
bonne régulation :
I.7.1 Critères d'analyse du modèle
linéaire :
CHAPITRE I Stabilisation d'un Système
Électro-énergétique
Rappelons que le facteur d'amortissement B d'un mode
représente par sa valeur propre complexe C est donne par :
(I.7)
Avec :
? Un facteur d'amortissement B important aboutit à une
réponse dynamique bien amortie. Pour cela, toutes les valeurs propres
doivent se trouver dans la zone gauche du plan complexe limite par deux
demi-droites issues de l'origine. Pour une valeur critique du
facteur d'amortissement : on impose alors une marge de
stabilité relative[16].
? La partie réelle de la valeur propre D
détermine la rapidité de décroissance/croissance des
exponentielles composant la réponse dynamique du système. Ainsi,
très négatif aboutit à une réponse dynamique
rapide. Pour cela, toutes les valeurs propres doivent se trouver dans la zone
gauche du plan complexe limite par une verticale passant par une valeur
critique de la partie réelle : on définit ainsi la
marge de stabilité absolue.
Lors du réglage des paramètres des
PSSs, il est souhaitable que ces deux critères soient pris en
compte pour permettre une bonne régulation. La combinaison entre ces
deux critères aboutit à une zone appelée zone de
stabilité D [17], figure (I.8). Le
déplacement des valeurs propres dans cette zone garantit une performance
robuste pour un grand nombre de points de
fonctionnement[18].
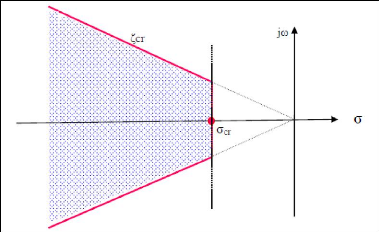
Figure I.8. Zone de la
stabilité D.
34
CHAPITRE I Stabilisation d'un Système
Électro-énergétique
35
Considérons par exemple un mode d'une fréquence
naturelle de , les oscillations associées à
ce mode s'amortissent en 13 secondes pour et en 6.5 et 3
secondes pour et
respectivement. Quelle est alors la valeur minimale
adéquate d'amortissement pour un
bon fonctionnement du Système de puissance ?
La littérature ne présente pas de valeurs
critiques rigoureuses admises par tous. Généralement, un facteur
d'amortissement de 0.05 n'assure qu'une petite marge de sécurité
tandis que
doit être accepte avec réserve. Les valeurs
d'amortissement entre 0.05 et 0.15 sont globalement
les plus utilisées dans la littérature. Nous
avons choisi comme facteur d'amortissement
critique. Ainsi, nous considérons que l'amortissement
des oscillations est suffisant si tous les
modes du système présentent des facteurs
d'amortissement plus grands que .
D'une façon similaire, la littérature donne une
gamme de variation de la valeur critique de la partie réelle des valeurs
propres, comprise entre de -0.5 et -1. Nous avons choisi
comme partie réelle critique a respecter par tous les
modes.
Enfin, d'autres spécifications peuvent être
utilisées telles les spécifications de la réponse du
système dans le domaine temporel (le dépassement maximum, le
temps d'établissement, l'erreur statique, ...)[17].
I.7.2. Critères de simulation :
La performance d'un contrôleur nécessite des
critères pour évaluer le "bon" comportement du système.
Elle peut être spécifiée dans le domaine temporel et/ou
fréquentiel[19].
Les caractéristiques dynamiques peuvent être
décrites en examinant la réponse a une entrée typique (tel
un échelon unité, ...). Ainsi, les spécifications de la
réponse transitoire (tels le dépassement maximum, le temps de
réponse, le temps de pic, ...) tout comme les critères
intégraux (tels IAE,ISE,ITAE,...) peuvent être utilises
comme indicateurs de performance des boucles de régulation[20]
.
a. Critères temporels instantanés
:
La réponse indicielle (réponse à un
échelon unité) d'un système oscillant du deuxième
ordre est donnée à la figure (I.9) [16].
Nous définissons les paramètres critiques
apparaissant sur cette figure :
? Dépassement maximum :
CHAPITRE I Stabilisation d'un Système
Électro-énergétique
36
Il est la mesure de la valeur maximale atteinte par la
réponse indicielle lors de son premier dépassement. Cette valeur
est souvent pondérée par la valeur finale : on parle alors de
dépassement maximum en pour cent, note( )et calcule par la
relation suivante :
(1.8)
Le dépassement maximum s'exprime en fonction du facteur
d'amortissement comme suit :
(I.9)
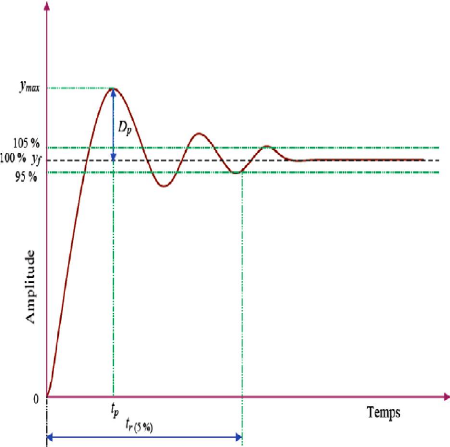
Figure I.9.
Caractéristiques de la réponse indicielle d'un
système.
CHAPITRE I Stabilisation d'un Système
Électro-énergétique
37
? Temps de pic :
Ce paramètre correspond à l'abscisse du
dépassement maximum. Ce paramètre de temps peut être
détermine analytiquement en fonction du facteur d'amortissement et de la
pulsation naturelle d'oscillation, comme suit :
(I.10)
? Temps de réponse (temps d'établissement)
:
Il correspond au temps nécessaire à la
réponse indicielle pour atteindre sa valeur finale avec une
tolérance de prés. La tolérance 5% est la
plus communément utilisée. Ce
paramètre
caractérise la rapidité relative de la
réponse du système. La relation approximative entre le temps de
réponse, le facteur d'amortissement et la pulsation naturelle
d'oscillation est donnée comme suit :
,
avec : (I.11)
La valeur critique du temps de réponse de la
stabilité dynamique (dite aussi stabilité dynamique) varie d'un
operateur de système de puissance a l'autre. Généralement,
elle s'étend de 10 à 20 secondes[19].
Finalement, nous pouvons remarquer qu'une augmentation du
facteur d'amortissement aboutit à une diminution du dépassement
maximum et du temps de réponse.
b. Critères temporels intégraux
:
Soit l'erreur dynamique associée à la
réponse indicielle du système. Différents
critères
typiques peuvent être utilises pour caractériser
la performance du système régule. Nous les définissons
ci-dessous
? t?
? Critère IAE,
Intégrale de l'Erreur Absolue (Intégral of Absolute
Error) : Le critère de performance est le suivant :
Etant donne que ce critère prend en compte tous les
éléments de la réponse harmonique, il donc
CHAPITRE I Stabilisation d'un Système
Électro-énergétique
38
important lorsque la réponse du système est
oscillatoire ; les faibles amortissements ne sont pas ainsi conseilles.
? Critère ISE, Intégrale du
Carrée de l'Erreur (Intégral of Square Error) : Le
critère de performance est alors le suivant :
(I.13) En général, le fait de travailler avec le
carre de l'erreur amplifie l'importance des valeurs de sortie qui
s'écartent le plus de la valeur finale.
? Critère ITAE, Intégrale de
l'Erreur Absolue pondérée par le Temps (Intégral Time
multiplied by Absolute Error) :
Le critère de performance est le suivant :
(I.14)
Puisque la valeur du critère ITAE est
pondérée par le temps, l'erreur statique est fortement
pénalisée : les systèmes a réponse très
oscillatoire sont ainsi pénalises.
En règle générale, le système sera
d'autant mieux règle que le critère intégral choisi sera
minimal.
CHAPITRE I Stabilisation d'un Système
Électro-énergétique
39
I.8. Conclusion :
Dans ce chapitre, nous avons présente les
définitions et les caractéristiques des différents types
de stabilité d'un système
électro-énergétique.
Le concept général de la stabilité peut se
synthétiser en trois groupes :
? stabilité de l'angle de rotor. ? stabilité de la
tension.
? stabilité de la fréquence.
L'amélioration de la stabilité angulaire par les
régulateurs, en particulier PSS est donc devenue un objectif
prioritaire : elle sera développée dans les suivants
chapitres.

Chapitre 2
Modélisation du
Système
Électro-énergétique
CHAPITRE II Modélisation du
Système Électro-énergétique
41
II.1.Introduction :
Étape l'importance, lorsqu'on veut analyser et
commander un système d'énergie électrique, consiste
à trouver un bon modèle mathématique.
Généralement, un modèle, dans l'analyse des
systèmes, est un ensemble d'équations ou de relations, qui
décrit convenablement les interactions entre les différentes
variables étudiées, dans la gamme de temps
considérée et avec la précision désirée,
pour un élément ou un même système physique, peut
donner lieu à des modèles différents.
Généralement, pour établir un
modèle de réseau électrique pour les études
dynamiques, on tient compte uniquement des équipements en
activité pendant la plage temporelle du phénomène
dynamique considéré. Le résultat est donc le modèle
de connaissance complet du système : il se compose d'équations
différentielles ordinaires non-linéaires et d'équations
algébriques[18].
Les modèles présentés dans ce chapitre
concernent les éléments suivants :
? Modèle de la machine synchrone. ? Régulation du
générateur.
o Régulateur de fréquence et modèle de la
turbine .
o Régulateur de tension et modèle du
système d'excitation . ? Modèle de PSS(Power System
Stabilizer).
CHAPITRE II Modélisation du
Système Électro-énergétique
42
II.2. Modèle du générateur:
L'énergie électrique est
généralement produite par les machines synchrones. Ces
dernières sont caractérisées par une vitesse de rotation
de l'arbre de sortie de chaque machine égale à la vitesse de
rotation du champ tournant. Pour obtenir un tel fonctionnement, un couple
mécanique issu d'une énergie primaire source, comme
l'énergie hydraulique, l'énergie nucléaire ou
l'énergie chimique, est appliqué à l'axe de la machine
synchrone via un lien mécanique intermédiaire, à savoir la
turbine. Le champ magnétique rotorique est généré
habituellement par un circuit d'excitation alimenté par courant continu.
La position du champ magnétique rotorique est alors fixe par rapport au
rotor : ceci impose en fonctionnement normal une vitesse de rotation identique
entre le rotor et le champ tournant statorique. Ainsi, les enroulements du
stator sont
soumis à des champs magnétiques qui varient
périodiquement. Une de courant alternatif est
donc induite dans le stator[3].
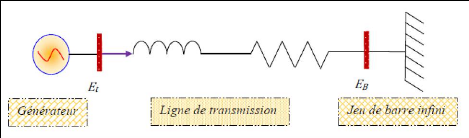
Figure II.1. Circuit
équivalent de la machine synchrone connectée a un jeu de barre
infini. fem E
? ' ?
Le modèle du générateur et de ses
contrôles se limite habituellement aux équations
différentielles ordinaires couplées entre elles. Il existe
plusieurs modèles, allant du plus simple, le modèle classique
représentant seulement les caractéristiques
électromécaniques du
générateur[9].
Les grandeurs de machine (générateur) sont
représentées sur la figure (II.1)
EB
?
: du générateur induite.
: La tension du jeu de barre infini.
: Réactance synchrone et réactance transitoire.
: La variation d'oscillation de rotor en .
Ce modèle néglige l'amortissement produit par les
courants de Foucault dans le corps de
rotor(on suppose que la est constant).
CHAPITRE II Modélisation du
Système Électro-énergétique
43
II.2.1.Équations électriques :
Nous allons déterminer les équations
algébriques du stator de cette machine. Le courant de la ligne est
exprimé par l'expression suivant :
(II.1)
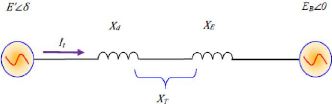
Figure II.2.Modèle
classique de générateur.
Les puissances électriques (apparente S, active
P, réactive Q) de la machine sont donnée par
:
E E
e e
(II.2)
Étant donné que les phénomènes
transitoires dans le stator sont négligés, le couple
électrique est
dons égale à la puissance électrique active
en per-unit. Ainsi .
sinG (II.3)
'
B
X
T P
e s
Un déséquilibre entre les couples
mécanique et électromagnétique agissant sur le rotor,
provoque une variation du mouvement du rotor, par rapport à une
référence synchrone tournante. Ainsi le couple
électromagnétique joue un rôle important dans la
stabilité angulaire. Ce couple est généralement produit
par les interactions entre les trois circuits du stator de
générateur, le circuit d'excitation et d'autres circuits tels les
enroulements amortisseurs[9].
AT = T +
TA = KsA? +
KAAO
Suit à une perturbation, les variations du couple
électromagnétique peuvent s'exprimer en
fonction des variations d'angle de rotor et de vitesse , suivant
l'équation (II.4), [21] :
(II.4)
CHAPITRE II Modélisation du Système
Électro-énergétique
: Coefficient de couple synchronisant.
: Coefficient de couple d'amortissent.
Le couple synchronisant est donnée par la composante ,
il représente la variation
de couple électromagnétique en phase avec la
variation d'angle de rotor .
Le couple synchronisant est produit par les interactions les
enroulements du stator et la composante fondamentale du flux de l'entrefer. Ce
couple tend à accélérer le rotor pour le ramener à
sa position initiale. Il agit comme un couple de rappel d'un ressort d'un
système mécanique, masse-ressort[22].
Pour des petites déviations du point de fonctionnement, le
coefficient de couple synchronisant est représenté par la pente
de la courbe de la relation (puissance-angle), comme le montre la
figure (II.3).
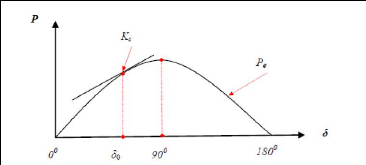
Figure II.3. La relation
(puissance-angle) du générateur et le coefficient
de couple
synchronisant
Si est l'angle de puissance à l'état
équilibré, entre la tension interne du générateur
et la
tension du jeu de barre infini la pente de courbe à est
simplement la dérivée de la fonction
puissance-angle :
Ks
a P e
a
8
80
cos80
EE'
B
X (II.5)
44
Le couple synchronisant détermine alors la
capacité du système de supporter une grande perturbation sans
perdre le synchronisme : il est un facteur important pour la stabilité
transitoire. En cas des petites perturbations, le couple synchronisant
détermine la fréquence des oscillations.
CHAPITRE II Modélisation du Système
Électro-énergétique
Le couple d'amortissement est donné par la composante,
, il représente la
variation de couple électromagnétique en phase
avec la variation da vitesse de rotor .
II.2.2.Équations
mécaniques :
Les propriétés mécaniques des machines
synchrones se modélisent généralement à l'aide de
l'équation, du mouvement basée sur le théorème du
moment cinétique[14] .Cette équation
présente une importance fondamentale dans l'étude des
oscillations électromécaniques, car ces oscillations
représentent un phénomène important dans la plupart des
systèmes électro-énergétiques, en particulier ceux
qui contiennent de lignes de transmission longues[14]. Dans le
fonctionnement à l'état d'équilibre, toutes les machines
synchrones du système tournant à la
même vitesse angulaire électrique. Le couple
mécanique est de même sens que le sens de
l'axe du générateur. Le couple électrique
. est de sens opposé à la rotation et ce couple
mécanique[8] , figure (II.4). Lors
d'une perturbation, un ou plusieurs générateurs peuvent
être accélérés ou ralentis et il y a donc risque de
perdre le synchronisme. Ceci peut avoir impact important sur la
stabilité du système et les générateurs perdant le
synchronisme doivent être débranchés, sinon ils pourraient
être sévèrement endommagés.
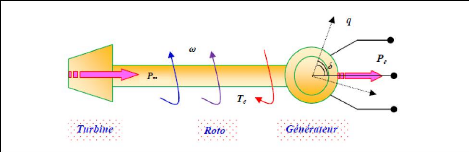
Figure II.4. Couple
mécanique et électrique agissant sur l'axe d'un
générateur.
r ( T m T
e )
- H ?
S'il y a un déséquilibre des couples agissants sur
le rotor de la machine, cette dernière va
accélérer ou ralentir selon l'équation du
mouvement suivant :
1
2
(II.6)
.
?
LÛ)
45
H
Avec constant d'inertie (en secondes) représentant
l'inertie totale de toutes les masses
tournantes connectées à l'arbre du
générateur.
CHAPITRE II Modélisation du Système
Électro-énergétique
46
Pour des oscillations à faibles fréquences, le
courant induit dans les enroulements amortisseurs est négligeable. Par
conséquent les enroulements amortisseurs peuvent être
complètement négligés dans la modélisation du
système. Si les enroulements amortisseurs sont ignorés, le couple
d'amortissement produit par ces enroulements amortisseurs est donc
également négligeable. Pour tenir compte de la composante du
couple négligée, on introduit dans l'équation
du mouvement un terme de compensation (nommé aussi
coefficient d'amortissement) enpu
[23].Ce coefficient représente
l'amortissement naturel du système :
il empêche l'accroissement des oscillations, à
moins qu'une source d'amortissement négatif soit introduite (tel le
régulateur de tension du système d'excitation).
L'équation du mouvement peut être donc
réécrite comme suit :
(II.7)
(II.8)
L'équation de l'angle de rotor est donnée par :
Avec :
Awr : Déviation de la vitesse
angulaire du rotor, en .
c n : vitesse de synchronisme (vitesse de base), en ,
( = 2,f , f Fréquence nominale,
en ).
Tm : Couple mécanique fourni par la
turbine, en .
Te : Couple électromagnétique
associée à la puissance électrique produite du
générateur,
(Te ? Pe ) ,en .
?r
KD: Coefficient d'amortissement du
générateur, en .
8 : Angle de rotor, en .
D'après transformation de LAPLACE des équations
(II.7) et (II.8), après on remplace . on
trouve :
(AT --K A8--K Aco
)
?I
?
Il
SA
cor
1
2H
m s D r
SA8 = co
Aco
0 r
(II.9)
CHAPITRE II Modélisation du Système
Électro-énergétique
On va réécrire l'équation
précédente sous forme matricielle :
(II.10)
L'équation (II.10) à la forme ( ),les
éléments de matrice dépendant des paramètres de
système et la condition initial est
présentée par la valeur de et .
Cet équation (II.10) décrire le signale de
performance est représenté dans le schéma de bloc
ci-dessous :
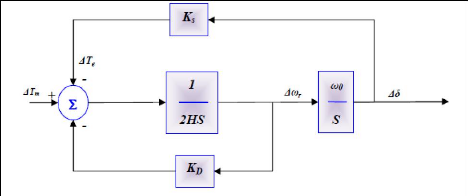
Figure II.5. Schéma bloc
du système (mono machine-jeu de barre infini) avec le
Modèle
classique.
? ? ? ? ? ? ? ?
? 1 ? ? ? 1 ? ?
S ? ? ? ? ?
0 0
? ?? K ? K ?
T ? ? ? ?? ?? ? K ? ? ? K
??? ? T ?? ??
s D r m s D m
S HS
? 2 ?S HS
? 2 ? ? ? 0 ? ? ?
K K ?
D'après le schéma bloc précédent,
on est formé notre système sous forme équation
différentiel à deuxième ordre.
2 D s
S 0
? S ? ?
2H 2H
(II.11)
On faire simplifier d'équation afin d'obtenir le
résultat suivant :
(II.12)
47
A l'aide d'équation (II.12), On peut déterminer
pulsation naturel et aussi le facteur
d'amortissement.
CHAPITRE II Modélisation du Système
Électro-énergétique

K5
?0
?n
2H
1
2 2HK5
KD
?
?0
(II.13)
II.2.3.l'effet dynamique du circuit de champ :
L'équation de flux de circuit de générateur
synchrone est donne :
(II.14)
i? (II.16)
Où : est la tension de sortie d'excitation.
Les circuits équivalents reliant le flux de la machine
et leurs courants sont montrés la figure suivant :
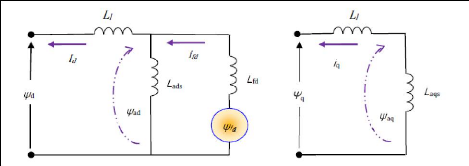
Figure II.6. Circuits
équivalents relatifs de l'enchainement du flux de la machine et courant.
Le flux de stator et de rotor sont données par :
? d
? ? L i ? L
l d ads
? q
??i? i ?
q fd
?? i q ? ?
i ? L
i q
i d
? ? ad
? ? aq

? ? ? ? ? ? fd
fd L fd
? ? ?
?
Lads
q aqs
?? i ? i ?
d fd
Ll
fd ad
?
Lfd
ifd
?
Lfd
Ll
Ll
ifd
? ? ad
(II.15)
On peut trouver a partir l'équation (II.15) :
48
CHAPITRE II Modélisation du Système
Électro-énergétique
Le flux mutuel dans l'axe peut être écrite en termes
de et :
(II.17)
Où:
e ? ? R
d a
Puisque il n'y a pas de circuits rotorique pris en compte dans
l'axe , la liaison de flux mutuelle est donnée par :
i ? ? ? ? R
d q a
R i
? d
i q
?
?L i ? ? ? l q
aq
? ? L i ? ? ? l d
ad
(II.18)
Le couple d'entrefer (le couple électromagnétique)
est :
(II.19)
L'équation suivant est montré de la tension de
stator avec on néglige le terme et la variation
de vitesse :
??
???
eq
La tension aux bornes de la machine et du jeu de barre infini
exprimé en termes d'axe et d'axe composants est donnée comme suit
:
E ? e ? je
t d q
? jEBq
E E t
? ? ? ?? EB ?? E ?
E ? R ? jX I
_ _ _
t B ? ?
EBd
(II.21)
L'équation de contraintes de réseau pour le
système représenté sur le figure (II.1).
?? ? ? ?
e ? je ?
E ? jE ? ? ? R ?
jX ?? i ? ji ?
d q Bd Bq E E d q
|
?
Résolution en composants de et dedonnés :
e ? R
d E
i ? X
d E
R i
i q i d
|
(II.22)
|
??
???
eq
? Eq
?
XE
(II.23)
49
CHAPITRE II Modélisation du Système
Électro-énergétique
Où :
On détermine l'expression des et , a partir des
équations (II.23) et (II.20) :
? ?
? ??
Ai = m A8 +
m A`F
d 1 2fd
|
EB
|
cos
|
?
?
|
?
?
|
|
RTEB
|
sin
|
?
|
? ?L ?
ads
??Lfd
???
? ? ? ?
i ?R
q T
?
id XTq
fd

D
? ? ?? ?? ? E cos ? ? ? X
E
Td B sin ?
? ?
Lads ? Lfd ? ??
D (II.24)
?
Lads
? ?
? ? L ? ?
+ (L + L )= X + X
aqs 1 E qs
+ (Lads +L1)
X X
E + ds
R = R + R
T a E
X = X
Tq E
XE
?
?
Tel que :
XTd
|
ads
fd B
D = RT +
XTdXTq
On veut poser l'équation (II.24) sous forme
linéaire
|
(II.25)
|
A8+n A`Ffd
2
n1
Aiq =
(II.26)
Avec :
EB
?X ? ? R ? ?
Tq
sin 0 T cos 0
D
EB
T sin 0 Td cos 0
D
?
XTq Lads
?
m2
?
D
Lads
?R ? ? X ?
?
Lfd
?
n2
Lads
(II.27)
RT
D
Lads
Lfd

?
m L '
?
?
2 ads
(II.28)
? ?? 1
' fd
L ads ?? ? ? ?
id L L
? fd fd
?
?
n 2
n L
? ?
?? ?? m L ?? '
? ? ? ??
2 ads fd
? ? ?
? ? ? ? ?
?? ad
?? aq
?
?
?
? iq
1 aqs
?? fd
L aqs
L aqs
Par linéarisation de l'équation (II.17) et (II.18)
on a :
50
CHAPITRE II Modélisation du Système
Électro-énergétique
Par linéarisation de l'équation (II.16) et
substituant de l'équation (II.28) donnée :
(II.29)
La forme linéaire d'équation est:
(II.30)
En remplace , Aiq , A`Pad et . dans les
équations (II.26), (II.28) et (II.29) nous obtenons :
(II.31)

Tel que : ? ?
('Pad0 + Laqsid0)
m1('Paq0 + Laqsiq0 )
n1
L'
aqs
0
+
iq
Lfd
(II.32)
'
('P + L i )--m ('P +L i
)
ad0 aqs d 0 2 aq0 aqs
q0
n2
A
Te
??T ? K? ?
? K ?? ? K ?? ?
te
K1
c
A
m 1 2 fd D r
i
A'P fd
8
A
?
?
Te
te
A
c
8 A8
?
?
lK2
Et remplace l'équation (II.31) dans l'équation
(II.20), qu'il devient :
1
?r 2H
?
??
S?
S?
Par équation (II.16) et substituant l'expression à
de l'équation (II.29) et en utilisant
l'équation (II.33) les équations de système
final désirée obtenons sont :

?
?
?
? ?
?
1
? ?
? ?
? ? ?
? ? ?
J
?
b11
0
a12 1
0 0 A8
a32
?
?A
A
?
0 0
b32
?
(II.34)
0
a13
a33
?
?
A
1
J
Tm
1 ? J??
AEfd
?
8
A
?
A?
?
a11
a21
0
1
?
J?
?
A?
51
Avec:
CHAPITRE II Modélisation du Système
Électro-énergétique
?
2
?
2
?
2
KD
H
K1
H
K2
H
a11
a12
a13
a32 ?
?0
Rfd
Lfd
a33
L L
fd ? fd ?
Ladu
?
?0
Rfd
b32
(II.35)
52
a ? ? ? 2?f
21 0 0
m L '
1 ads
? ? ?? ?
? R L ' ?
0 fd ads '
?? 1 m L ??
2 ads
Avec et dépends des commandes de moteur et
d'excitation. L'inductance mutuelle
Laas Laas ,dans les
équations ci-dessus sont saturés valeur.
La figure (II.7) montre la représentation de
schéma fonctionnel de la petite exécution de signal du
système.
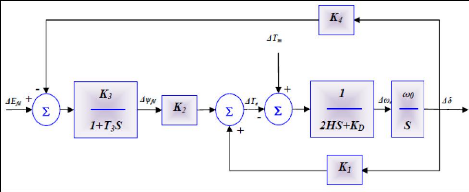
Figure II.7.
Représentation de schéma fonctionnel avec la
constante fd
La variation 0'P fd est
déterminée par équation dynamique de circuit de champ :
SAW fd = a32A8 +
a33AW fd + b32Efd
(II.36)
Par des limites groupant K2AW fd et
réarrangeant :
CHAPITRE II Modélisation du Système
Électro-énergétique
(II.37)
1 ?
a33
K4
T3 ?
(II.38)
Tel que :
a32
b32
K T ' 3 0
d L id Ladu
53
II.3.Régulation du générateur
:
Si l'équilibre des puissances actives n'est plus
assuré, la fréquence de synchronisme dans le système sera
changée, alors qu'un déséquilibre des puissances
réactives entraînera une variation des tensions du système
par rapport à leurs valeurs de référence.
Pour assurer une génération satisfaisante
d'énergie électrique, pour un grand nombre de points de
fonctionnement, le couple mécanique appliqué au
rotor et la tension d'excitation doivent
être réglés systématiquement pour
s'accommoder de toute variation du système.
Le système responsable de la génération
du couple mécanique et ainsi de l'entraînement du rotor du
générateur est appelé "système de force motrice".
Le contrôle de la fréquence (ou contrôle de la puissance
active) associé à ce système maintient la vitesse nominale
des générateurs en assurant de ce fait une fréquence
constante. Par ailleurs, le système d'excitation est responsable de la
tension d'excitation fournie au générateur. Les valeurs du
système d'excitation pour enfin obtenir les tensions
désirées aux bornes du
générateur[9].
II.3.1.Régulateur de fréquence et
modèle de la turbine :
Un système de force motrice, figure (II.8), se compose
de la source d'énergie primaire, de la turbine (équipé
d'un servomoteur) et du régulateur de fréquence (gouverneur)
[24].
La turbine transforme l'énergie potentielle de la
source en énergie de rotation de l'arbre (rotor) sur lequel est
placé l'alternateur. L'alternateur convertie la puissance
mécanique fournie par la turbine en puissance électrique de
sortie. La vitesse de l'arbre de la turbine est mesurée
précisément et comparée à la vitesse de
référence. Le régulateur de fréquence (vitesse)
agit ensuite sur le servomoteur pour ouvrir et fermer les vannes de
contrôle et modifier par
CHAPITRE II Modélisation du Système
Électro-énergétique
54
conséquent la vitesse de générateur.
Ainsi le rôle de la turbine est d'entraîner le rotor du
générateur à la vitesse synchrone correspondant à
la fréquence du système
électro-énergétique.
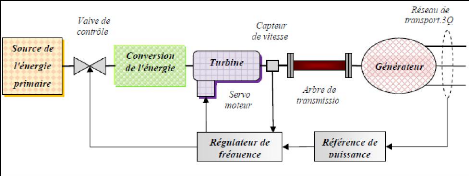
Figure II.8. Structure
générale d'un système de force
motrice-générateur.
Les turbines à vapeur utilisées dans les
centrales thermiques (charbon, gaz, pétrole, nucléaire) sont
constituées d'un certain nombre de roues, successivement fixes et
mobiles, portant des ailettes le long desquelles la vapeur se déplace.
Au fur et à mesure que la vapeur progresse axialement dans la turbine,
sa pression diminue et la taille des ailettes augmente. Ces différentes
roues sont généralement groupées en plusieurs
étages, particulièrement dans les centrales de grande puissance.
La division de la turbine en étages permet de réchauffer la
vapeur entre les étages en assurant, par conséquent, un meilleur
rendement au cycle thermique[25].
Le gouverneur forme une boucle de retour qui surveille la
vitesse du rotor à chaque instant. Considérons par exemple une
perturbation de l'équilibre des puissances actives. Dans les toutes
premières secondes, l'énergie correspondante va être
prélevée sur l'énergie cinétique des masses
tournantes des unités de production. Ceci va entraîner une
perturbation de la vitesse de rotation de ces unités. Cet écart
de vitesse doit être détecté et corrigé
automatiquement par les gouverneurs. Ces gouverneurs doivent changer
l'admission de fluide (vapeur, gaz ou eau) dans les turbines de manière
à ramener les vitesses et donc la fréquence du réseau,
autour de leurs valeurs nominales.
Dans l'analyse de la stabilité transitoire ou
dynamique, la réponse temporelle du système de la force motrice
à une perturbation est considérée comme plus lente que la
plage de l'étude de la force motrice peut être extrêmement
simplifiée. Pour une analyse de stabilité transitoire d'une
durée de quelques secondes, le modèle du système de la
force motrice peut être supprimé en considérant que le
couple mécanique de la turbine reste constant[24].
CHAPITRE II Modélisation du
Système Électro-énergétique
55
II.3.2.Régulateur de tension et modèle du
système d'excitation :
Le système d'excitation est un système
auxiliaire qui alimente les enroulements d'excitation de la machine synchrone
afin que cette dernière puisse fournir le niveau de puissance
demandé. En régime permanant, ce système fournit une
tension et un courant continu mais il doit être capable également
de faire varier rapidement la tension d'excitation en cas de perturbation sur
le réseau[25].
Actuellement, des systèmes d'excitation variés sont
employés. Trois principaux types peuvent être
identifiés[26].
? Les systèmes d'excitation à courant continu
« CC »:
Ils utilisent une génératrice à courant
continu avec collecteur comme source de puissance du système
d'excitation.
? Les systèmes d'excitation à courant alternatif
« CA »:
Ils utilisent un alternateur et des redresseurs statiques ou
tournants pour produire le courant continu nécessaire dans l'enroulement
d'excitation de la machine synchrone.
? Les systèmes d'excitation statiques «
système ST » :
Dans ce cas, le courant d'excitation est fourni par un
redresseur commandé. Sa puissance est fournie soit directement par le
générateur à travers un transformateur donnant le niveau
approprié de tension, soit par des enroulements auxiliaires
montés dans le générateur.
Le système d'excitation sont équipés de
contrôleurs, appelés habituellement régulateurs de tension
(Automatic Voltage Regulator : AVR), figure (II.9). Ces derniers sont
très important pour l'équilibre de la puissance réactive
qui sera fournie ou absorbée selon les besoins des charges. En outre ces
contrôleurs représentent un moyen très important pour
assurer la stabilité transitoire du système
électro-énergétique. Le régulateur de tension agit
sur le courant d'excitation de l'alternateur pour régler le flux
magnétique dans la machine et "ramener" la tension de sortie de la
machine aux valeurs souhaitées. Une caractéristique très
importante d'un régulateur de tension est sa capacité à
faire varier rapidement la tension d'excitation.
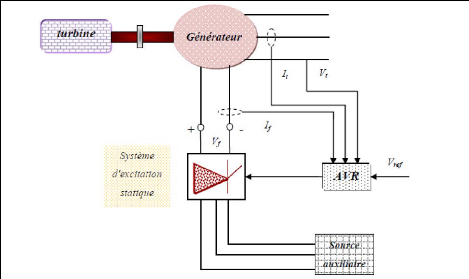
CHAPITRE II Modélisation du Système
Électro-énergétique
56
Figure II.9. Structure d'un
système d'excitation statique avec son AVR.
E + A E =
e + A + e + A
e
Le groupe IEEE task forces présente
périodiquement des recommandations pour la modélisation des
éléments d'un système de puissance dont les
systèmes d'excitation. Plusieurs modèles sont
suggérés pour chaque type de système
d'excitation[26]. Les systèmes d'excitation statiques
étant les plus installés actuellement, nous avons donc choisi
dans notre étude d'utiliser le modèle du système
IEEE-STIA, modèle le plus utilisé dans la
littérature. Ce type de système d'excitation se
caractérise par sa rapidité et sa
sensibilité[22].
La tension aux bornes de générateur peut
être exprimée en forme complexe :
? ?
E? e ? je
t d q
E e
2 2
?
t d
? e 2
2
( ) ( e ) ( )2
2
t 0 t d 0 d q 0
q

?
??
q
E t 0?E t ?
ed0?ed ? eq0?eq
(II.39)
D'appliquer une petite perturbation, on peut écrire :
(II.40)
En négligeant plus haut limites d'ordre d'expression
l'équation ci-dessus réduite à :
(II.41)
Donc :
CHAPITRE II Modélisation du Système
Électro-énergétique
(II.42)
En termes de valeur perturbée, équation(II.20) peut
être écrit :
(II.43)
En utilisant les équations (II.26) et (II.28), nous
obtenons :
Où :
(II.44)
? ? ? ? ? ?
?
K 6
e e
d 0
? ? ? ? ? ? ? ? ?
K R m L n L n R n ? L m ?
L m ?

5 a 1 1 1 aqs 1 a 1 1 1
ads 1
E E
t 0 t 0
?? R m ? L n ?
L n ? a 2 1 2 aqs 2
0
ed
?
0
Et
0
eq
?
0
Et
q 0 '
? ?
? R n L m L
? ? ? ?
' 1 m
? ? ?? ?
a 2 1 2 ads ?? 1
? ?

(II.45)
? ? Lfd ? ?
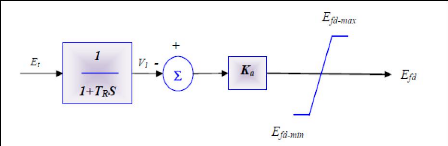
Pour l'analyse à échelle réduite, le
système d'excitation de thyristor comme montré dans la figure
(II.10) est considéré la non linéarité
associée avec le plafond sur l'excitateur produire la
tension représenté prés et ce qui est
ignoré pour des études de petit perturbation.
Figure II.10. système
d'équitation statique (thyristor) avec AVR. À partir du bloc
de la figure (II.10), en utilisant perturbé valeurs, nous avons:
|
?v1
|
?
|
1
|
|
Et
|
|
|
1?TR
|
S
|
(II.46)
|
57
D'où :
58
CHAPITRE II Modélisation du Système
Électro-énergétique
Co 0 R fd
(II.47)
On remplace dans l'équation (II.44), nous obtenons :
a ? ? b K ? ?
K
34 32 A A
L adu
(II.48)
D'après le bloc 2 de la figure (II.10), nous obtenons :
(II.49)
En termes de valeurs perturbées, nous avons :
(II.50)
L'équation dynamique du circuit de champ montrée
dans l'équation (II.36), devient :
L'expression de rester sans changement, nous avons premier ordre
commande le
modèle pour l'excitateur, l'ordre du système global
est augmenté prés 1 ; la nouvelle variable
d'état supplémentaire est .
(II.53)
Avec:
|
a41
|
|
|
a42
|
?
0
|
K5
T R
|
|
a43
|
K6
T R
1
|
a44 ? T R (II.54)
CHAPITRE II Modélisation du Système
Électro-énergétique
L'espace d'état complet de modèle pour le
système d'alimentation, incluant le système d'excitation de la
figure (II. 7) à la forme suivante :
?
??
?
?
?
?
??fd ? ? ? ? ? ? ?
?
??
?v1
a 0 ? ? ? ? ? ?
b
13 0
? ? ? ?
? 0
a21
0
0
? ? ? ? ? ?
a a ? ? ?? ? ? 0
a 32
a 42
33 34 fd
? ?? ?? ?
a a ? ? ? v ?
? 0
a a
11 12
43 44 1
0 0 0 ? ? ? ? ? ?
59
La figure (II.11) montre le schéma fonctionnel obtenu
en bloc de la figure (II.7) pour inclure le capteur de tension et le
régulateur automatique de tension avec excitateur. La
représentation est
applicable à n'importe quel type d'excitateur, avec
représentation de la fonction de
transfert de AVR et excitateur. Pour un
thyristor-excitateur .
Le signal terminal d'erreur de tension, qui forme le bloc de
capteur de tension d'entrée est donné
par : . (II.56)
R E ? jX E
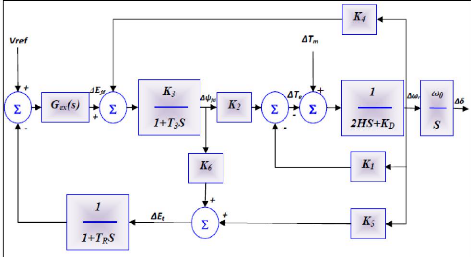
Figure II.11.
Représentation du schéma bloc avec l'excitateur et AVR.
K6
Le coefficient est toujours positif tandis que peut être
dépendre positif ou négatif de la
condition. Et impédance externe de réseau . La
valeur de a un significatif portant
sur l'influence de AVR sur
l'amortissement de l'oscillation de système[27].
II.4.Modèle de power system stabiliser PSS[27]
:
CHAPITRE II Modélisation du Système
Électro-énergétique
60
La fonction de base du stabilisateur de système de
puissance est d'ajouter l'atténuation à l'oscillation de rotor de
générateur en commandant son excitation, utilisant les signaux
stabilisants auxiliaires. A fourniture atténuant, le stabilisateur doit
produire un composant de la base théorique de PSS est
illustrée par du schéma fonctionnel, comme le montre la figure
ci-dessous.
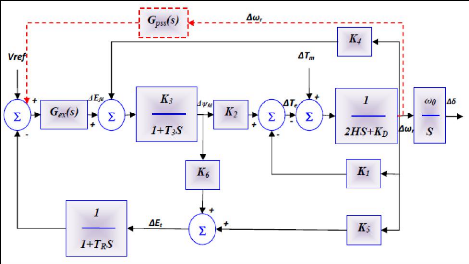
Figure II.12. Représentation du schéma bloc
avec AVR et PSS. II.4.1.Modèle du système d'excitation avec PSS
[27]:
Puisque le but de PSS est d'introduire un composant
de couple d'amortissement. Un signal logique pour employer pour l'excitation de
contrôle de générateur est la déviation de
vitesse
La fonction de transfert de , devrait avoir les circuits
appropriés de compensation
de phase pour compenser le retard de phase entre
l'entrée d'excitateur et le couple électrique. Ce qui suit est
une brève description de la base de la configuration PSS et de
considération dans la sélection des paramètres.
CHAPITRE II Modélisation du Système
Électro-énergétique
K PSS
S A v = a A +
A + A'T! +
51 co 52 8 53
a a a v + A T
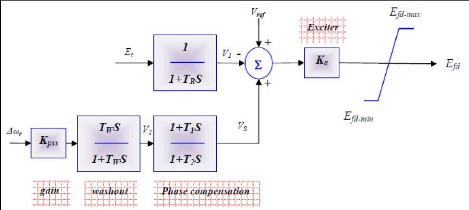
Figure II.13. Système
d'excitation statique avec AVR et PSS.
2 r fd 54 2 m
Du bloc 4 de la figure (II.13), d'emploi des valeurs
perturbées, nous avons :
(II.57)
Remplacer donné par l'équation (II.34), nous
obtenons l'expression suivant pour en
|
termes de variables d'état :
2H
Avec:
|
(II.58)
|
a ? K a
51 PSS 11
|
a52
a53
v = A v ?
? S A v = S A v
+ A v A v
s 2 I s 2 2
s
|
K a
PSS 12
K a
PSS 13
( 1 + ST ? T 1
1
|
|
a54
|
?
|
1
T W
|
(II.59)
|
Du bloc (5) :
? 1 + ST ? T T T
61
L'équation (II.61) est résulte par substitution
donné par l'équation (II.55).
62
CHAPITRE II Modélisation du Système
Électro-énergétique
? 0 Rid K
a ?
36 A
L adu
(II.61)
Avec :
|
a61
|
?
|
T1
T 2
|
a51
|
|
a62
|
|
|
|
a63
|
?
T1
T 2
|
T1
a52
T 2
|
a53
|
|
|
a65
|
?
|
T1
T 2
|
a55
1
|
1
?
T1
|
|
a66
|
? ?
|
T 2
|
(II.62)
|
Du bloc 2, nous obtenons . (II.63)
L'équation de circuit de champ, avec PSS inclus,
devient :
L'équation (II.59) récapitule le modèle
complet du l'état-espace, où on inclure le PSS, avec
.
?
?
?
?
?
?
0 0 0
0 0 0 0 0
0 a a a 0
32 33 34
0 a a a 0 0
42 43 44
a 0 a 0
53 55
a a
61 62
a21
a36 ? ? ? ?
a a
51 52
?
?
?
??
?
??? ? ? ?
?v1
?
?v2
?
?
?vs
??
a13
a a
11 12
0
a66 ? ? ?? ?
a65
a63
??
?
?
??
?
?v
1
?v
2
?v
s
?
?
?
?
?
?
?
?
? ?
?
?
(II.65)
CHAPITRE II Modélisation du
Système Électro-énergétique
63
II.5.Conclusion :
Dans ce chapitre, nous avons présenté la
modélisation du système électro-énergétique
pour les études de la stabilité angulaire.
Nous avons abordé ici, les points ci-dessous :
? Le modèle choisi pour machine synchrone du
système est du troisième ordre. Les
équations différentielles de la machine sont
décrites par les trois variables . Ce
modèle convient bien pour les études de
stabilité angulaire.
? Le modèle du système de la force motrice (la
turbine et leurs régulateurs ...) peut être supprimé en
considérant que le couple mécanique de la turbine reste
constant.
? Le système d'excitation et leurs régulateurs sont
aussi modélisés.
? Le modèle complet du l'état-espace, incluant le
PSS, avec .
Après présenté les modèles du
système, nous présentons dans le chapitre suivant, le
fonctionnement et modèle d'un contrôleur côté
générateur PSS.
Chapitre 3
La stabilisateur de puissance
(P55 conventionnel)
CHAPITRE III Stabilisateur de puissance (PSS
conventionnel)
III.1. Introduction :
La stabilité peut être considérablement
améliorée en utilisant des systèmes en boucle
fermée avec des systèmes de contrôle adaptés. Au fil
des années, un effort de recherche important était affecté
pour une meilleure conception de tels contrôleurs. Il y a principalement
deux moyens rapides permettant d'améliore la stabilité :
? L'utilisation d'un contrôleur côté
générateur (PSS) : signal de contrôle
supplémentaire dans le système d'excitation du
générateur.
? L'utilisation d'un contrôleur coté de lignes de
transmission: signal de contrôle supplémentaire dans le
système FACTS (Flexible AC Transmission System).
Ces systèmes restent très chers pour être
installés uniquement pour une raison d'amortissement des
oscillations.
Les contrôleurs PSSs qui sont des
systèmes simples et faciles à installés, pratiques,
efficaces et moins chers, sont les systèmes les plus utilisés
pour améliorer la stabilité aux petites perturbations. Nous
allons donc les utiliser dans notre étude.
65
CHAPITRE III Stabilisateur de puissance (PSS
conventionnel)
III.2.Fonctionnement et modèle de PSS:
Un PSS permet d'ajouter un signal de tension
proportionnel à la variation de vitesse de rotor dans l'entrée du
régulateur de tension (AVR) du générateur, figure
(III. 1). Un couple électrique en phase avec la variation de vitesse de
rotor est ainsi produit dans le générateur. Par
conséquent, avec un système d'excitation rapide et fort,
l'avantage présenté par un couple synchronisant important est
toujours assuré et le problème de la décroissance du
couple d'amortissement est corrigé [28,22]. Le PSS
va s'opposer à toutes les faibles oscillations en forçant le
système d'excitation à varier au plus juste et au bon moment.
Par conséquent, l'ensemble du système de
contrôle d'excitation (AVR et PSS) doit assurer les
points suivants[29]:
· supporter les premières oscillations faisant
suite à une grande perturbation ; c.-à-d. assurer la
stabilité transitoire du système.
· maximiser l'amortissement des oscillations
électromécaniques associées aux modes locaux ainsi qu'aux
modes interrégionaux sans effets négatifs sur les autres
modes.
· minimiser la probabilité d'effets
défavorables, à savoir :
o les interactions avec les phénomènes de
hautes fréquences dans le système
électro-énergétique telle la résonance dans le
réseau de transport.
o les instabilités locales dans la bande de l'action
désirée du système de contrôle.
· être suffisamment robuste pour permettre au
système de contrôle d'assurer ses objectifs pour divers points de
fonctionnement probables du système
électro-énergétique. Le choix du signal d'entrée de
PSS représente une étape critique dans la conception du
PSS. Plusieurs considérations interviennent dans ce choix,
telles :
· la sensibilité du signal d'entrée aux
oscillations électromécaniques (autrement dit, les modes
oscillatoires doivent être "observables" dans le signal choisi).
· l'insensibilité du signal d'entrée du
PSS à son propre signal de sortie. D'une façon
similaire, la sensibilité doit être très la plus faible
possible pour les signaux de sortie d'autres PSS.
Un bon résultat peut être obtenu si l'entrée
du PSS est la variation de la vitesse de rotor ( ), la
variation de puissance produite du générateur (
) ou la fréquence du jeu de barre ( ). Etant
donné que le PSS est utilisé pour produire
un couple électrique proportionnel à la variation de
vitesse, il apparaît donc plus convenable d'utiliser la
variation de vitesse ( ) comme entrée du
PSS. Cependant, quel que soit le signal d'entrée,
la fonction de transfert du PSS doit compenser les
caractéristiques de phase du système d'excitation, des parties
électriques du générateur et des autres parties
électriques du système. L'ensemble de ces dernières
déterminent la fonction de
66
CHAPITRE III Stabilisateur de puissance (PSS
conventionnel)
transfert entre l'entrée du système d'excitation (
) et le couple électrique du générateur
( ),[30]. Cette fonction de transfert est
dénotée GEP(s), figure (III.1).
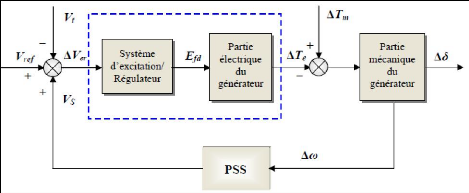
Figure III.1. Modèle
simplifie de liaison entre un PSS et le système.
Le type de PSS le plus utilisé est connu sous
le nom de PSS conventionnel (ou PSS avance/retard). Ce type a
montré sa grande efficacité dans le maintien de la
stabilité aux petites perturbations. Ce PSS utilise la
variation de vitesse de rotor comme entrée. Il se compose
généralement de quatre blocs, figure (III.2) :
? un bloc d'amplificateur.
? un bloc de filtre passe-haut "filtre washout". ? un bloc de
compensation de phase.
? un limiteur.
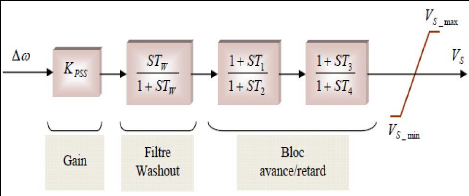
Figure III.2. Modèle d'un
PSS avance/retard.
67
a) CHAPITRE III Stabilisateur de puissance (PSS
conventionnel)
L'amplificateur :
Il détermine la valeur de l'amortissement introduit
par le PSS. Théoriquement, sa valeur (KPSS) doit
correspondre à l'amortissement maximal. Toutefois, la valeur du gain
doit satisfaire l'amortissement des modes dominants du système sans
risquer de dégrader la stabilité des autres modes ou la
stabilité transitoire[29]. Généralement,
KPSS varie généralement de 0.01 à
50[4].
b) Le filtre passe-haut "filtre washout":
Il élimine les oscillations à très basse
fréquence (inférieure à 0.2 Hz )
présentées dans le signal d'entrée. Il supprime
également la composante continue de la vitesse (la composante "DC"
correspondant au régime statique) : le PSS ne
réagit donc que lorsqu'il y a des variations de
vitesse. La constante de temps de ce filtre () doit
être suffisamment grande pour permettre aux signaux, dont la
fréquence est située dans la bande utile, d'être transmis
sans atténuation. Mais, elle ne doit pas être trop grande pour
éviter de mener à des variations indésirables de tension
de
générateur pendant les conditions
d'îlotage. Généralement, varie de 1 à 20 secondes
. Une
amélioration remarquable sur la stabilité de la
première oscillation est obtenue avec une valeur
fixée à 10 secondes[19] .
c) Le filtre compensation de phase :
L'origine de l'amortissement négatif est, comme nous
l'avons vu, associée au retard de phase
introduit entre le couple électrique du
générateur ( ) et l'entrée du système
d'excitation( ).
Par conséquent, le PSS fournit l'avance de
phase nécessaire pour compenser le retard de phase de la fonction de
transfert GEP. Pratiquement, un bloc de phase d'avance pure ne suffit
pas pour réaliser la compensation de phase nécessaire ; ainsi, un
bloc d'avance/retard de phase est souvent utilisé. Pour mieux garantir
la stabilité du système, deux étages (au moins) de
compensations de phase sont nécessaires. La fonction de transfert de
chaque étage est une simple combinaison de pole-zéro, les
constantes de temps d'avance et de retard étant réglables. La
gamme de chaque constante de temps s'étend généralement de
0.01 à 6 secondes . Mais pour des considérations
de réalisation physique, les constantes de temps de retard sont
considérées fixes et généralement autour de la
valeur de 0.05 secondes[31] .
d) Le limiteur :
Le PSS est conçu pour améliorer
l'amortissement du système en cas de petites variations autour d'un
point d'équilibre. Son objectif n'est pas de restaurer la
stabilité du système aux perturbations sévères (la
stabilité transitoire). Le PSS a parfois tendance à
perturber le bon fonctionnement du
68
CHAPITRE III Stabilisateur de puissance (PSS
conventionnel)
régulateur de tension en le saturant lorsque ce dernier
essaye de maintenir la tension lors des conditions transitoires. Ainsi, le
PSS doit être équipé d'un limiteur afin de
réduire son influence indésirable durant les phases
transitoires[30].Les valeurs minimales et maximales du
limiteur s'étendent de 0.02 à 0.1 per-unit[32]
.
III.3.Réglage des paramètres de PSS:
Le problème de la conception d'un PSS est de
déterminer les valeurs de ses paramètres pour : ? augmenter
l'amortissement des modes du système.
? assurer une stabilisation robuste.
La minimisation des risques probables des interactions
défavorables et des effets négatifs sur les autres modes
oscillatoires du système représente aussi un point critique
important qui influence le réglage de PSS. En outre, les
valeurs des paramètres du PSS doivent être
réglées sans entraîner d'effet négatif dans la
restauration de la stabilité transitoire. De nombreuses méthodes
sont proposées dans la littérature pour le réglage des
paramètres de PSS. Généralement, la plupart de
ces méthodes sont basées sur l'analyse des valeurs propres du
système.
III.3.1.Méthode de compensation de phase :
Pour expliquer le réglage des paramètres de
PSS par la méthode de compensation de phase, nous prenons un
système simple consistant en un générateur connecté
à un jeu de barre infini, figure (III.3). Le modèle
linéaire de ce système peut être graphiquement
illustré par la représentation de Heffron-Philips[19]
, comme le montre la figure (III.3).
Les termes K1 K6 sont les constantes de
linéarisation.
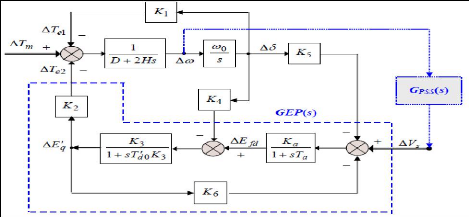
Figure III.3. Modèle de
Heffron-Philips d'un système (mono-machine-jeu de barre infini).
69
CHAPITRE III Stabilisateur de puissance (PSS
conventionnel)
L'objectif principal d'un PSS est d'introduire une
composante d'un couple électrique sur le rotor de la machine synchrone ,
ce couple est proportionnel à l'écart entre la vitesse actuelle
du rotor et la vitesse de synchronisme.
Lorsque le rotor oscille, ce couple agit comme un couple
d'amortissement pour atténuer les oscillations. La fonction de transfert
GEP(s) et le retard de phase de la boucle électrique peuvent
être dérivés du modèle de Heffron-Philips. Ils sont
donnés par les deux relations suivantes[32].
? 1 1
G s ? K
PSS ( ) PSS 1 ? 1 2
sT ? ? sT ?
? ? ? K ? G
s
PSS f (
? sT ? ? sT ?
(III.1)
(III.2)
Avec : est la valeur propre calculée pour le
système sans signal de stabilisation Pour
simplifier, nous considérons que les paramètres
à régler du PSS sont le gain et les
constantes de temps T1 et T3 (avec
T1=T3) , les autres paramètres sont fixés (avec
T2=T4) Ainsi, la fonction de transfert de PSS peut se
réécrire comme suit :
T= T =
1 3
w--axtan(/3
2 )
(III.3)
Étant donné que l'avance de phase du PSS(
)est égale à la phase ( ) la constante
de temps T1 est donnée, tout calcul fait, par la
relation suivante :
? ? ? ? ? ? T ? ?
T ? ?
1 ? 1 ? ?
1 2
? PhiGEP ? tan ?
? ?? tan ? ?? ?? ? ? ? ?
? ? ?? ? 2 tan
Avec :
|
?
|
1
2
|
1 ? ? T ? ? 1 ? ?
T 2 ? ?
|
(III.5)
|
GEP(s
f
(III.6)
K
2
Le gain du PSS, quant à lui, est donné par
la relation suivante :
K PSS
4? n
? H
) G ( s )
s ?? ?? ?
j ?
70
CHAPITRE III Stabilisateur de puissance (PSS
conventionnel)
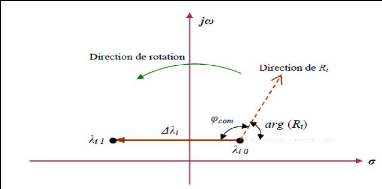
71
Avec:
(III.7)
: La vitesse de synchronisme du système, en rad/s. : La
pulsation naturelle d'oscillation en rad/s.
La valeur représente la solution de l'équation
caractéristique de la boucle mécanique figure
(III.1). Elle est définie par l'équation suivante
(coefficient d'amortissement négligée).
sT
? 1 ? sT ?
? 1
H ? s ? ? K
PSS ??
1 ? sT ? 1 ?
sT
? 2 ?
, Avec: (III.8)
III.3.2.Méthodes du résidu :
Nous avons vu que le filtre avance/retard du PSS est
utilisé pour compenser le retard de phase de la fonction de transfert
GEP(s). En déterminant la valeur du retard de phase, nous
pouvons ainsi calculer les constantes de temps (avance/retard)
nécessaires pour assurer la compensation demandée. Pour ce faire,
l'angle de phase de résidu peut être
utilisé[1,33].
Considérons la forme suivante de la fonction de transfert
du PSS pour un système à une entrée/une sortie
:
m
(III.9)
Où : est le nombre d'étages de compensation
(généralement )
La figure (III.4) montre l'effet du résidu sur le
déplacement de valeur propre dans la partie gauche du plan complexe.
Figure III.4. Déplacement
de valeur propre par la rotation du résidu associe.
CHAPITRE III Stabilisateur de puissance (PSS
conventionnel)
L'angle de phase , nécessaire pour diriger la direction du
résidu de sorte que la valeur
propre associée se déplace parallèlement
à l'axe réelle, peut être calculé par
l'équation
suivante :
(III.10)
Où : est l'angle de phase du résidu .
Par conséquent, les constantes de temps T1 et
T2, du bloc avance/retard nécessaires pour obtenir
l'angle , peuvent être calculées comme suit:
,
(III.11)
|
Avec :
|
a
|
?
|
1?sin
|
? ? ?
com
? ?
? m ?
|
|
|
|
|
|
|
1? sin
|
? ? ?
com
? ?
? m ?
|
(III.12)
|
Où : est la fréquence du mode en rad/sec.
Pour calculer le gain , nous pouvons réécrire la
fonction transfert du PSS comme suit :
(III.13)
Le déplacement des valeurs propres est donné
ci-dessous :
2 2
i 1 - 0
. H f
(III.14)
En remplaçant l'équation (III.13) dans la
dernière équation, nous obtenons pour gain la
K PSS
( i )
valeur littérale suivante :
i
?
2
Ri
(III.15)
72
Une autre méthode peut être utilisée pour
régler le gain : la méthode traditionnelle de
Ziegler et Nichols basée sur l'étude du
régime critique de la réponse harmonique du système en
boucle fermée. On cherche ainsi le gain produisant l'instabilité.
Le test consiste à augmenter lentement le gain de stabilisateur
jusqu'à l'observation de l'instabilité. Pour un signal
d'entrée de type variations de vitesse, ce test doit être
effectué avec une charge maximale et des conditions
73
CHAPITRE III Stabilisateur de puissance (PSS
conventionnel)
1--G(s)H(s)=0
de transport d'énergie satisfaisantes. Le savoir-faire
montre, en général, que le gain désiré
représente le tiers du gain à l'instabilité
: [34].
III.3.3.Méthode de placement des pôles :
Cette méthode consiste à déterminer les
valeurs des paramètres d'un PSS de sorte que tous les
pôles du système en boucle fermée se trouvent placés
en des positions spécifiées préalablement dans le plan
complexe. Cette méthode peut être mathématiquement
décrite en considérant la représentation suivante du
système [31,10] figure (III.5).
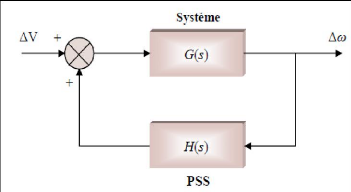
Figure III.5. L'ensemble
(système-PSS) en boucle fermée.
Où : est la fonction de transfert du système entre
le signal de référence du régulateur de
tension de générateur, où le PSS
doit être installé, et la variation de vitesse de rotor .
est la fonction de transfert de PSS.
? i ? 1,2 . . . n
Les pôles de G(s) sont justement les valeurs
propres du système linéarisé en boucle ouverte.
La fonction de transfert du système entier en boucle
fermée F(s) devient :
=H(s)=
G(s )
(III.16)
1
(III.17)
Si ,sont les valeurs propres spécifiées
préalablement, l'équation (III.17) peut ainsi se
réécrire comme suit :
CHAPITRE III Stabilisateur de puissance (PSS
conventionnel)
74
(III.18)
(III.19)
Par conséquent, nous obtenons un ensemble
d'équations algébriques linéaires. En résolvant ces
équations, nous pouvons déterminer les valeurs des
paramètres désirés du PSS qui assurent le
placement précis des valeurs propres.
III.4. Emplacement optimal des PSSs:
Tous les générateurs du système ne
participent pas aux modes dominants : tous les générateurs n'ont
donc pas besoin d'être équipés des PSSs. En outre,
il faut tenir compte des interactions négatives entre les PSSs
qui augmentent avec le nombre de ces derniers. Enfin, il faut tenir compte
des critères économiques.
Ainsi, la première étape de la mise en oeuvre
des PSSs ,est de trouver les emplacements optimaux des PSSs
nécessaires et de déterminer leur nombre. Ce problème
a fait l'objet, depuis une dizaine d'années, d'un grand nombre de
recherche[35 ; 37 ; 38 ; 39 ; 40 ; 41]. Les approches les plus
efficaces proposées sont basées sur l'analyse modale du
système linéarisé :
? Le mode Shape.
? Les facteurs de participations. ? Les résidus.
Comme nous l'avons vu, les amplitudes des résidus
associés aux modes dominants de la fonction de transfert du
système en boucle ouverte peuvent être utilisées pour
déterminer les placements les plus efficaces pour installer les
PSSs. Les amplitudes des facteurs de participation ou du mode Shape
permettent de déterminer l'influence de chaque variable d'état
dans les modes oscillatoires associés. Ces méthodes peuvent donc
nous fournir des indications importantes sur l'emplacement optimal des PSSs
dans le système pour réaliser un meilleur amortissement par
rapport à des critères donnés.
Sachant que des emplacements différents des PSSs
entraînent des oscillations totalement différentes, des
PSSs "mal placés" peuvent donc ne pas répondre aux
objectifs. Pour cela, il faut bien choisir la méthode qu'il faut
appliquer pour déterminer les bons emplacements des PSSs .Les
méthodes mentionnées ci-dessus donnent généralement
de bons résultats, mais la recherche de méthodes plus efficace
reste toujours actuelle.
CHAPITRE III Stabilisateur de puissance (PSS
conventionnel)
75
III.5.Résultat et discussion :
III.5.1.Exécution du système
étudié avec PSS :
D'après le chapitre (II) précédent, on peut
utiliser MATLAB/simulink pour l'application du modèle de la figure
(II.12).
? Paramètre schéma bloc de simulation
K1=0.7635, K2=0.8643, K3(exciter gain)=0.3230, K4=1.4188, K5 =
0.1462, K6=0.4166.
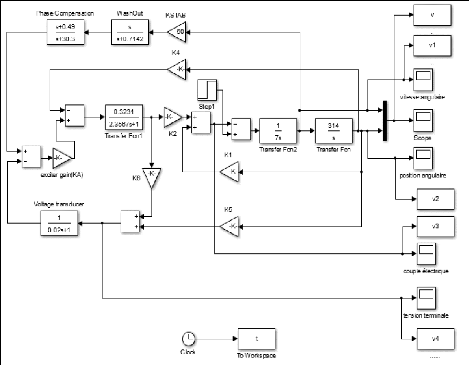
Figure III.6.
Représentation du réseau SMIB+PSS sur
MATLAB/Simulink.
Les résultats de simulation pour chacun d'angle de
charge, de la vitesse angulaire, du couple électrique et de la tension
terminale montré au-dessous.
CHAPITRE III Stabilisateur de puissance (PSS
conventionnel)
3
2.5
2
1.5
1
0.5
0
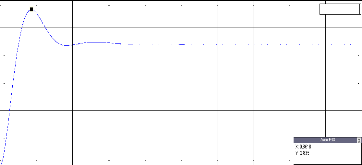
Avec PSS
76
0 1 2 3 4 5 6 7 8 9 10
temps (s)
Figure III.7. Présente la
variation du position angulaire.
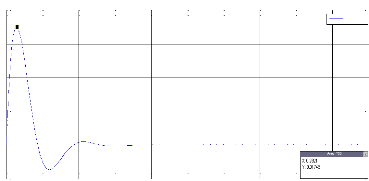
15
10
.5
5
0
Avec PSS
0 1 2 3 4 5 6 7 8 9 10
temps(s)
Figure III.8. Présente la
variation de la vitesse angulaire.
1.4
1.2
1
0.8
0.6
0.4
0.2
0
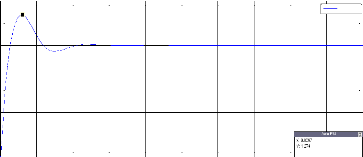
Avec PSS
0 1 2 3 4 5 6 7 8 9 10
temps(s)
Figure III.9. Présente la
variation du couple électrique.
CHAPITRE III Stabilisateur de puissance (PSS
conventionnel)
-0.05
0.25
0.15
0.05
-0.1
0.3
0.2
0.1
0
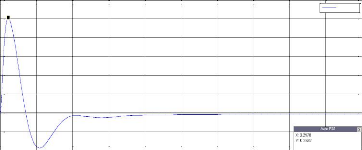
Avec PSS
0 1 2 3 4 5 6 7 8 9 10
temps(s)
Figure III.10. Présente la
variation de la tension terminale. III.5.2.Etude comparative entre
la mise en oeuvre du système étudié avec, et sans PSS
:
Nous avons comparé entre les deux cas suivants, où
notre système est connecté avec le régulateur PSS
conventionnelle et l'autre sans régulateur, puis choisissez le
choix le plus efficace et le meilleur selon le critère de performance
qui permettent à la bonne exploitation du système. D'après
le chapitre (II) précédent, on peut utiliser MATLAB/simulink pour
l'application les deux schémas blocs dans la figure (II.12), et la
figure (II.11).
Cette représentation du réseau SMIB+AVR dans la
figure(III.11).
? Paramètre schéma bloc de simulation:
K1=0.7635, K2=0.8643, K3(exciter gain)=0.3230, K4=1.4188, K5 =
0.1462, K6=0.4166.
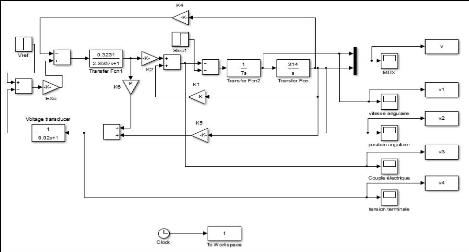
Figure III.11.
Représentation du réseau SMIB+AVR sur
MATLAB/Simulink.
77
CHAPITRE III Stabilisateur de puissance (PSS
conventionnel)
78
Les résultats de simulation dans les figures (III.12),
(III.13), (III.14), (III.15), et (III.16) est montré au-dessous, pour
chacun d'angle de charge, de la vitesse angulaire, du couple électrique
et de la tension terminale, avec PSS est sans PSS.
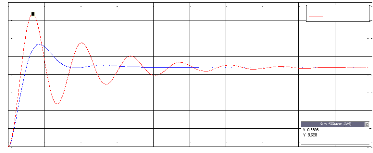
3.5
2.5
0.5
1.5
4
3
2
0
0 1 2 3 4 5 6 7 8 9
1
Avec PSS
Sans PSS(avec AVR)
10
temps(s)
Figure III.12. Présente la
variation du position angulaire.
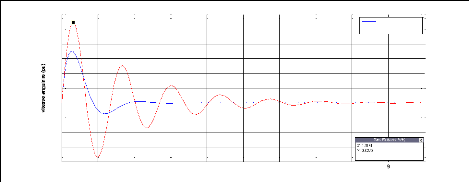
-0.005
-0.015
0.025
0.015
0.005
-0.01
-0.02
0 1 2 3 4 5 6 7 8
0.03
0.02
0.01
0
temps(s)
Avec PSS
Sans PSS(avec AVR)
10
Figure III.13. Présente la
variation de la vitesse angulaire.
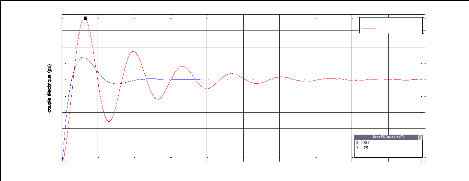
0.8
0.6
0.4
0.2
1.8
1.6
1.4
1.2
0
1
temps(s)
Avec PSS
Sans PSS(avec AVR)
10
0 1 2 3 4 5 6 7 8 9
Figure III.14. Présente la
variation du couple électrique.
CHAPITRE III Stabilisateur de puissance (PSS
conventionnel)
0.3 0.25 0.2 0.15 0.1 0.05 0 -0.05 -0.1
|
|
|
|
|
|
|
|
|
PSS
PSS(avec AVR)
|
|
Avec
Sans
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 1 2 3 4 5 6 7 8 9 1
temps(s)
79
Figure III.15. Présente la
variation de la tension terminale.
angle de charge (pu)
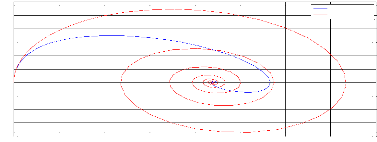
-0.005
-0.015
0.025
0.015
0.005
-0.01
-0.02
0 0.5 1 1.5 2 2.5 3 3.5 4
0.03
0.02
0.01
0
|
|
|
|
|
|
Avec PSS
Sans PSS(avec AVR)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Figure III.16. Présente la
variation de la vitesse angulaire par rapport la variation d'angle.
Afin de connaître l'effet de la stabilisateur
PSS, on peut appliquer des quelques critères dans les deux cas,
où le système était avec PSS conventionnelle et
sans PSS.
Premièrement, Nous définissons les
paramètres «des critères temporels instantanés«
sur le tableau (III.1), pour chacun courbe d'angle de charge, de la vitesse
angulaire et du couple électrique :
|
Les cas
|
Sans PSS
|
Avec CONV PSS
|
|
La courbe
|
8
|
w
|
Te
|
8
|
w
|
Te
|
|
Dp
|
1.419
|
0.0271
|
0.0271
|
0.638
|
0.01833
|
0.304
|
|
t p
|
0.6734
|
0.314
|
0.6331
|
0.8358
|
0.2658
|
0.5604
|
|
tr?5%?4.752
|
|
|
4.753
|
1.385
|
|
1.606
|
Tableau III.1. Comparaison des
critères temporels instantanés du système avec et sans
PSS.
CHAPITRE III Stabilisateur de puissance (PSS
conventionnel)
Lors nous faisons déplacer le PSS au
système, ce dernier va à la stabilité tôt (1.385s
pour l'angle de charge, et 1.606s pour le couple électrique). Par
contre, dans le cas sans PSS le système devient stable à
4.752s, et à 4.753s pour l'angle et le couple électrique,
respectivement.
Deuxièmement, les différents critères
typiques peuvent être utilisés pour caractériser la
performance du système régulé les paramètres des
critères temporels intégraux ( [IAE]Integral of Absolute
Error, [ISE] Intégral of Square Error, et aussi [ITAE]
Intégral Time multiplied by Absolute Error), on peut montrer sur le
tableau (III.2).
|
Les cas
|
Sans PSS
|
Avec CONV PSS
|
|
IAE
|
0.1495
|
0.1169
|
|
ISE
|
0.007102
|
0.007336
|
|
ITAE
|
0.3273
|
0.2232
|
Tableau III.2. Comparaison des
critères temporels intégraux du système avec et sans
PSS.
Nous avons connait d'après les chapitres
précédents, le système sera d'autant mieux
réglé lors le critère intégral choisi sera
minimal.
Du tableau au-dessus on peut vérifier que le
système avec PSS conventionnelle mieux réglé,
parce que l'intégrale de l'erreur absolue est minimale par rapport le
cas sans PSS
( ), aussi l'intégrale de l'erreur absolue
pondérée par le temps
est minimale ( ).
80
CHAPITRE III Stabilisateur de puissance (PSS
conventionnel)
III.6. Conclusion :
Dans ce chapitre, nous avons présenté d'une
façon générale le modèle et la fonctionnement du
stabilisateur PSS. En outre, Le réglage de paramètres
des PSSs et leurs emplacements sont des facteurs critiques pour
pouvoir assurer convenablement le bon fonctionnement des PSSs.
En termes de la simulation, nous exécutons du
système étudié sans PSS et dans autre cas on
ajoute le PSS conventionnelle. Ainsi qu'on peut étudier
comparative entre la mise en oeuvre du système avec, et sans
PSS.
Enfin, les stabilisateurs de puissance (PSSs)
conventionnelle, par leur efficacité et leur coût réduit,
sont les moyens habituels non seulement pour éliminer les effets
négatifs des régulateurs de tension, mais aussi pour amortir les
oscillations électromécaniques du système, dans le
chapitre suivant nous présentons quelque aspects théoriques de la
logique floue , ainsi que les bases de son application pour la commande de
processus.
81

Chapitre 4
P55 a basé sur la logique
floue
(Fuzzy)
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
IV.1.Introduction :
Au départ théorie, la logique
floue(FUZZY) s'affirme comme une technique opérationnelle.
Utilisée à côté d'autres techniques de
contrôle avancé, elle fait une entrée discrète mais
appréciée dans les automatismes de contrôle industriel. En
outre, la logique floue ne remplace pas nécessairement les
systèmes de régulation conventionnels. Elle est
complémentaire[42].
L'utilisation de la commande floue est particulièrement
intéressante lorsqu' on ne dispose pas de modèle
mathématique précis du processus à commander ou lorsque ce
dernier présente de trop fortes non linéarités ou
imprécision.
Dans ce chapitre, nous présenterons quelque aspect
théorique de la logique floue, ainsi que les bases de son application
pour la commande de processus.
83
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
84
IV.2.Apparition de la logique floue :
Le terme d'ensemble flou apparaît pour la
première fois en 1965 lorsque le professeur Lotfi A. Zadeh, de
l'université de Berkeley aux USA, publie un article intitulé
« Ensembles flous » (Fuzzy sets). Il a réalisé depuis
de nombreuses avancées théoriques majeures dans le domaine et a
été rapidement accompagné par de nombreux chercheurs
développant des travaux théoriques. Parallèlement,
certains chercheurs se sont penchés sur la résolution par logique
floue de problèmes réputés difficiles. Ainsi en 1975, le
professeur Mamdani à Londres développe une stratégie pour
le contrôle des procédés et présente les
résultats très encourageants qu'il a obtenus sur la conduite d'un
moteur à vapeur. En 1978, la société danoise F.L.Smidth
réalise le contrôle d'un four à ciment. C'est là la
première véritable application industrielle de la logique
floue[42].
IV.3.Utilisation de la logique floue pour le
contrôle :
La logique floue est bien connue des automaticiens pour ses
applications dans le contrôle-commande de procédés,
appelé alors couramment « contrôle flou ». Tout comme un
contrôleur (ou correcteur) classique, le contrôleur flou
s'insère dans la boucle de régulation et calcule la commande
à appliquer au procédé suivant une ou plusieurs consignes
et une ou plusieurs mesures effectuées sur
celui-ci[42].
Les bases de règles floues sont intéressantes en
commande car elles permettent :
? de prendre en compte une expertise existante de nature
qualitative.
? de prendre en compte des variables que l'on sait difficilement
intégrer dans la boucle. ? d'améliorer le fonctionnement de
contrôleurs classiques, par :
o autoréglage hors ligne ou en ligne des gains de ces
contrôleurs,
o modification de leur sortie en fonction
d'événements qui ne peuvent pas être pris en compte par une
technique classique.
IV.4.La théorie des ensemble floue :
IV.4.1.Notion d'appartenance partielle :
Dans la théorie des ensembles, un élément
appartient ou n'appartient pas à un ensemble. La notion d'ensemble est
à l'origine de nombreuses théories mathématiques. Cette
notion essentielle ne permet cependant pas de rendre compte de situations
pourtant simples et rencontrées fréquemment. Parmi des fruits, il
est facile de définir l'ensemble des pommes. Par contre, il sera plus
difficile de définir l'ensemble des pommes mûres. On
conçoit bien que la pomme mûrit progressivement... la notion de
pomme mûre est donc graduelle. C'est pour prendre en compte de telles
situations qu'a été créée la notion d'ensemble
flou. La théorie des ensembles flous
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
85
repose sur la notion d'appartenance partielle : chaque
élément appartient partiellement ou graduellement aux ensembles
flous qui ont été définis. Les contours de chaque ensemble
flou Figure (IV.1) ne sont pas « nets », mais « flous » ou
« graduels » [42] .
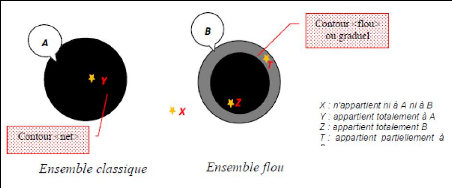
Figure IV.1. Comparaison d'un
ensemble classique et d'un ensemble flou.
IV.4.2.Fonction d'appartenance (FA) :
Un ensemble flou est défini par sa « fonction
d'appartenance », qui correspond à la notion de « fonction
caractéristique » en logique classique. Supposons que nous voulions
définir l'ensemble des personnes de « taille moyenne ». En
logique classique, nous conviendrons par
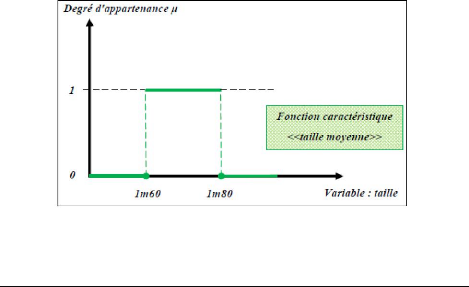
Figure IV.2. Fonction
caractéristique.
exemple que les personnes de taille moyenne sont celles dont
la taille est comprise entre et
. La fonction caractéristique de
l'ensemble Figure (IV.2).
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
86
Donne «0» pour les tailles hors de l'intervalle [ ]
et «1» dans cet intervalle.
L'ensemble flou des personnes de « taille moyenne »
sera défini par une « fonction d'appartenance » qui
diffère d'une fonction caractéristique par le fait qu'elle peut
prendre n'importe quelle valeur dans l'intervalle [0, 1]. A chaque taille
possible correspondra un «degré d'appartenance » à
l'ensemble flou des « tailles moyennes » Figure (IV.3), compris entre
0 et 1.
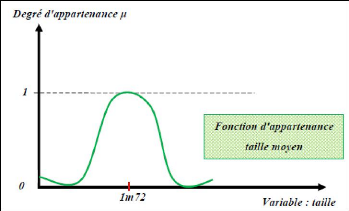
Figure IV.3. Fonction
d'appartenance.
Plusieurs ensembles flous peuvent être définis
sur la même variable, par exemple les ensembles « taille petite
», « taille moyenne » et « taille grande », notions
explicitées chacune par une fonction d'appartenance Figure (IV.4).
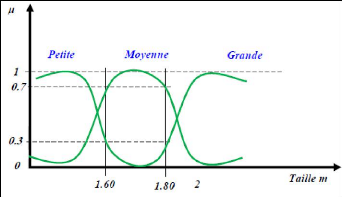
Figure IV.4. Fonction
d'appartenance, variable et terme linguistique.
1 . 80m
Cet exemple montre la gradualité que permet
d'introduire la logique floue. Une personne de appartient à l'ensemble
« taille grande » avec un degré 0.3 et à l'ensemble
« taille
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
87
moyenne » avec un degré de 0.7. En logique
classique, le passage de moyen à grand serait
brusque. Une personne de serait par exemple de taille moyenne
alors qu'une personne de
serait grande, ce qui choque l'intuition. La variable (par
exemple : taille) ainsi que les termes (par exemple : moyenne, grande)
définis par les fonctions d'appartenance portent respectivement les noms
de variable linguistique et de termes linguistiques. Comme cela sera vu plus
loin, variables et termes linguistiques peuvent être utilisés
directement dans des règles[42].
Les fonctions d'appartenance peuvent théoriquement
prendre n'importe quelle forme (FA triangulaire, FA
trapézoïdale, FA gaussienne...etc.) Toutefois, elles
sont souvent définies par des segments de droites, et dites «
linéaires par morceaux » Figure (IV.5).
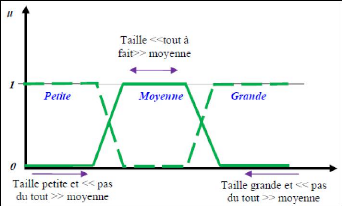
Figure IV.5. Fonctions
d'appartenance linéaires par morceaux. Les fonctions d'appartenance
« linéaires par morceaux » sont très utilisées
car :
? elles sont simples,
? elles comportent des points permettant de définir les
zones où la notion est vraie, les zones où elle est fausse, ce
qui simplifie le recueil d'expertise.
Dans certains cas, les fonctions d'appartenance peuvent
être égales à 1 pour une seule valeur de la variable et
égales à 0 ailleurs, et prennent alors le nom de « fonctions
d'appartenance singletons ». Un singleton flou Figure (IV.6) défini
sur une variable réelle (taille) est la traduction dans le domaine flou
d'une valeur particulière (taille de Paul) de cette variable
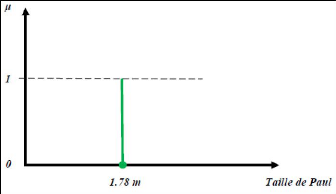
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
88
Figure IV.6. Fonction
d'appartenance singleton. IV.4.2.1.Fuzzification "Degré
d'appartenance" :
L'opération de fuzzification permet de passer du
domaine réel au domaine du flou. Elle consiste à
déterminer le degré d'appartenance d'une valeur (mesurée
par exemple) à un ensemble flou. Par exemple Figure (IV.7), si la valeur
courante de la variable « entrée » est de 2, le degré
d'appartenance à la fonction d'appartenance « entrée faible
» est égal à 0.4 qui est le résultat de la
fuzzification[42] .
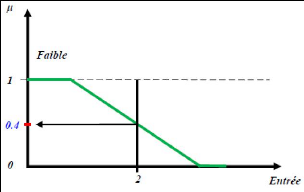
Figure IV.7.
Fuzzification.
On peut aussi dire que la proposition « entrée
faible » est vraie à 0,4. On parle alors de degré de
vérité de la proposition. Degré d'appartenance et
degré de vérité sont donc des notions similaires.
IV.4.3.Opérateurs logiques flous :
Ces opérateurs permettent d'écrire des combinaisons
logiques entre notions floues, c'est-à dire
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
89
de faire des calculs sur des degrés de
vérité. Comme pour la logique classique, on peut définir
des opérateurs (ET),(OU),(négation)
[42].
Exemple : Appartement Intéressant = Loyer Raisonnable
ET Surface Suffisante.
IV.4.3.1.Choix des opérateurs :
Il existe de nombreuses variantes dans ces opérateurs (cf.
annexe). Cependant, les plus répandus sont ceux dits «de
Zadeh» décrits ci-dessous. Leur utilisation sera reprise dans
l'exemple didactique d'utilisation d'une base de règles
floues[42]. Dans ce qui suit, le degré de
vérité d'une
proposition A sera noté .
a) Intersection :
L'opérateur logique correspondant à l'intersection
d'ensembles est le ET. Le degré de vérité de la
proposition (A ET B) est le minimum des degrés de
vérité de A et de B :
Exemple :
« Température Basse » est varie à
0.7
<ET>
« Pression Faible » est varie à
0.5
est donc varie à 0.5 = MIN(0.7 ,0.5)
Remarque : l'opérateur ET de la
logique classique est bien respecté : 0 ET 1 donne bien 0.
b) Union :
L'opérateur logique correspondant à l'union
d'ensembles est le OU. Le degré de vérité de la
proposition « A OU B » est le maximum des degrés de
vérité de A et de B :
Exemple :
« Température Basse » est varie à
0.7
<OU>
« Pression Faible » est varie à 0.5
est donc varie à 0.7 = MAX(0.7 ,0.5)
Remarque : l'opérateur OU de la
logique classique est bien respecté : 0 OU 1 donne bien 1.
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
90
c) Complément :
L'opérateur logique correspondant au complément
d'un ensemble est la négation.
Exemple :
<NON>
« Température Basse » est varie à
0.7
est donc varie à 0.3 = (1-0.7)
Remarque : l'opérateur négation
de la logique classique est bien respecté : NON(0) donne bien 1
et NON(1) donne bien 0.
IV.4.4.Règles floues :
IV.4.4.1.La logique floue et l'intelligence
artificielle :
La logique floue a pour objectif de formaliser et de mettre en
oeuvre la façon de raisonner d'un être humain. En cela, elle peut
être classée dans le domaine de l'intelligence artificielle.
L'outil le plus utilisé dans les applications de logique floue est la
base de règles floues. Une base de règles floues est
composée de règles qui sont généralement
utilisées en parallèle, mais peuvent également être
enchaînées dans certaines applications[42].
Une règle est du type :
SI« prédicat »ALORS« conclusion
»
Par exemple : « SI température
élevée et pression forte ALORS ventilation forte et soupape
grande ouverte».
Les bases de règles floues, tout comme les
systèmes experts classiques, fonctionnent en s'appuyant sur une base de
connaissance issue de l'expertise humaine. Il y a néanmoins de grandes
différences dans les caractéristiques et le traitement de cette
connaissance Tableau (IV.1). Une règle floue comporte trois
étapes fonctionnelles résumées dans la Figure (IV.8).
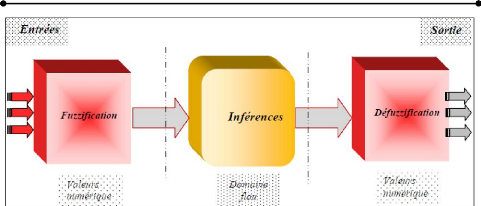
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
91
Figure IV.8. Traitement
flou.
|
Base de règles floues
|
Base de règles classiques (système expert)
|
|
Peu de règles
|
Beaucoup de règles
|
|
Traitement graduel
|
Traitement booléen
|
|
Enchaînement possible mais peu utilisé
|
Règles enchaînées A OU B C
|
|
C D
|
|
D ET A E
|
|
Règles traitées en parallèle
|
Règles utilisées une par une,
séquentiellement
|
|
Interpolation entre règles pouvant se contredire
|
Pas d'interpolation, pas de contradiction
|
Tableau IV.1. Base de
règles floues et base de règles classiques.
IV.4.4.1.1.Prédicat :
Un prédicat (encore appelé prémisse ou
condition) est une combinaison de propositions par des opérateurs
ET,OU,NON. Les propositions « température
élevée » et « pression forte » de l'exemple
précédent sont combinées par l'opérateur ET
pour former le prédicat de la règle[42].
IV.4.4.1.2.Inférence :
Le mécanisme d'inférence le plus couramment
utilisé est celui dit « de Mamdani ». Il
représente une simplification du mécanisme plus
général basé sur « l'implication floue » et le
« modus ponens généralisé ». Seules les bases de
règles « de Mamdani » sont utilisées dans ce
qui suit[42].
IV.4.4.1.3.Conclusion :
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
La conclusion d'une règle floue est une combinaison de
propositions liées par des opérateurs (ET).
Dans l'exemple précédent, « ventilation
forte » et « soupape grande ouverte » sont la conclusion de la
règle.
On n'utilise pas de clauses (OU) dans les
conclusions, car elles introduiraient une incertitude dans la connaissance
(l'expertise ne permettrait pas de déterminer quelle décision
prendre). Cette incertitude n'est pas prise en compte par le mécanisme
d'inférence de Mamdani, qui ne permet de gérer que des
imprécisions. Les règles floues « de Mamdani »
ne sont donc a priori pas adaptées à du diagnostic de type «
diagnostic médical » pour lequel les conclusions sont incertaines.
La théorie des possibilités, inventée par Lotfi Zadeh,
apporte dans ces cas une méthodologie adéquate.
De même, la négation est a priori interdite dans
les conclusions pour des règles de Mamdani. En effet, si une
règle avait par exemple la conclusion « Alors ventilation non
moyenne », il serait impossible de dire si cela signifie «
ventilation faible » ou « ventilation forte ». Ce serait encore
un cas d'incertitude[42].
IV.4.4.2.Mécanisme d'inférence de Mamdani
:
Une base de règles floues de Mamdani comprend
donc des règles linguistiques faisant appel à des fonctions
d'appartenance pour décrire les concepts utilisés Figure (IV.9).
Le mécanisme d'inférence comprend les étapes
suivantes[42]:
? Fuzzification
La fuzzification consiste à évaluer les
fonctions d'appartenance utilisées dans les prédicats des
règles, comme illustré par la Figure (IV.10) :
92
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
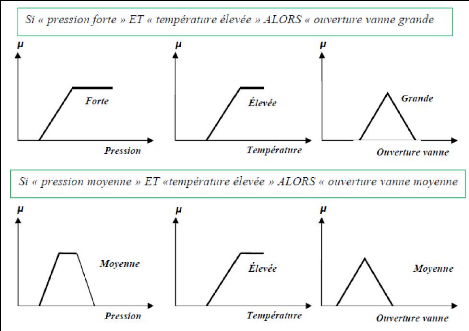
93
Figure IV.9. Implication.
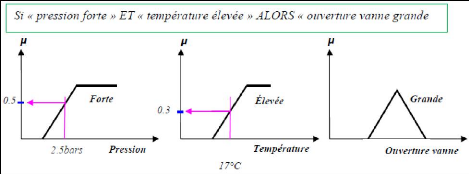
Figure IV.10.
Fuzzification.
? Degré d'activation :
Le degré d'activation d'une règle est
l'évaluation du prédicat de chaque règle par combinaison
logique des propositions du prédicat, comme illustré figure
(IV.11). Le (ET) est réalisé en effectuant le minimum
entre les degrés de vérité des propositions.
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
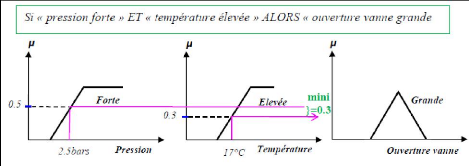
94
Figure IV.11. Activation.
? Implication :
Le degré d'activation de la règle permet de
déterminer la conclusion de la règle, c'est l'implication. Il
existe plusieurs opérateurs d'implication, mais le plus utilisé
est le «minimum ». L'ensemble flou de conclusion est construit en
réalisant le minimum entre le degré d'activation et la fonction
d'appartenance, sorte d'«écrêtage» de la fonction
d'appartenance de conclusion Figure (IV.12).
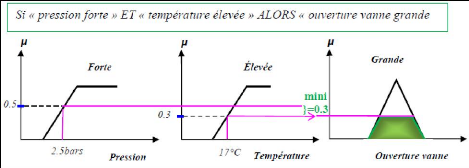
Figure IV.12.
Implication.
? Agrégation :
L'ensemble flou global de sortie est construit par
agrégation des ensembles flous obtenus par chacune des règles
concernant cette sortie.
L'exemple suivant présente le cas où deux
règles agissent sur une sortie. On considère que les
règles sont liées par un (OU) logique, et on calcule donc le
maximum entre les fonctions d'appartenance résultantes pour chaque
règle Figure (IV.13).
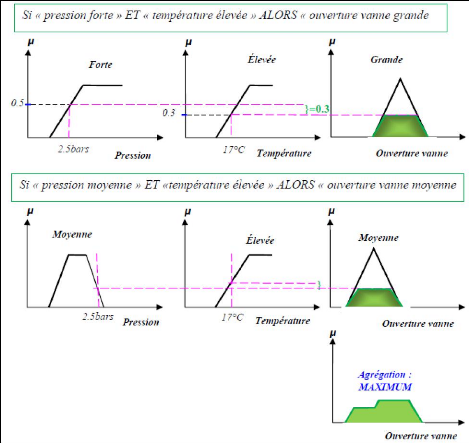
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
95
Figure IV.13. Agrégation
des règles.
IV.4.4.3.Défuzzification :
A la fin de l'inférence, l'ensemble flou de sortie est
déterminé mais il n'est pas directement utilisable pour donner
une information précise à l'opérateur ou commander un
actionneur. Il est nécessaire de passer du « monde flou » au
« monde réel », c'est la défuzzification. Il existe
plusieurs méthodes, la plus souvent rencontrée étant le
calcul du «centre de gravité» de l'ensemble flou Figure
(IV.14) [42] .
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
96
Figure IV.14.
Défuzzification par centre de gravité.
IV.4.4.4.Règles « libres » et « en tableau
» [42]:
Les bases de règles floues, dans leur cas
général, sont donc définies par des fonctions
d'appartenance sur les variables du système, et par des règles
qui peuvent être écrites textuellement. Chaque règle fait
appel à des entrées et des sorties qui peuvent être
différentes, comme le montre l'exemple qui suit :
R1 : SI « température élevée
» ALORS « sortie élevée »
R2 : SI « température moyenne » ET
« pression basse » ALORS « sortie moyenne
»
R3 : SI « température moyenne » ET
« pression élevée » ALORS « sortie
basse »
R4 : SI « température basse » ET
« pression élevée » ALORS « sortie
très basse » Schématiquement, on peut représenter les
« zones d'action » des règles et leur recouvrement dans le
tableau du tableau (IV.2).
|
Pression/Température
|
Basse
|
Moyenne
|
Élevée
|
|
Élevée
|
Sortie très basse
|
Sortie basse
|
Sortie élevée
|
|
Basse
|
|
Sortie moyenne
|
Sortie élevée
|
Tableau IV.2. Implication
représentée en tableau.
On constate que :
? tout l'espace n'est pas forcément couvert ; la
combinaison « température basse et pression basse » n'est pas
ici prise en compte ; l'explication est par exemple que cette combinaison n'est
physiquement pas possible pour cette machine, ou qu'elle ne nous
intéresse pas ; il est préférable de le vérifier
car il peut s'agir d'un oubli .
? la première règle ne prend en compte que la
température ; cette situation est tout à fait normale dans la
mesure où elle reflète correctement l'expertise existante.
Beaucoup d'applications définissent cependant des « tableaux »
de règles. Dans cette optique ,
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
97
l'espace est « quadrillé », et à
chaque « case » correspond une règle. Cette approche a
l'avantage d'être systématique, mais :
o elle ne permet pas toujours de traduire simplement (en un
minimum de règles) l'expertise existante,
o elle n'est applicable que pour deux voire trois
entrées, alors que des bases de règles «libres »
peuvent être bâties avec un nombre important de variables.
Remarques :
o Une base de règles floues a un comportement statique
non linéaire par rapport à ses entrées.
o Les bases de règles floues ne sont pas dynamiques en
elles-mêmes, bien qu'elles utilisent souvent comme entrées des
variables traduisant la dynamique du système (dérivées,
intégrales, ...) ou le temps.
IV.5.Contrôleur flou :
La figure ci-dessous illustre le structure schématique
du contrôleur de logique floue qui se compose d'une interface de
Fuzzification, une base de connaissances, la prise de décision logique,
et interface défuzzification[43,27] .
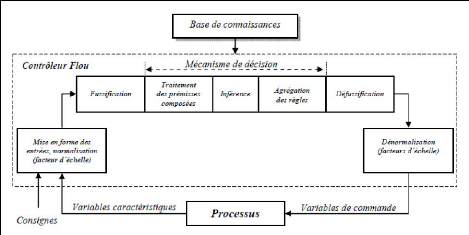
Figure IV.15. Structure de base
d'un contrôleur flou.
IV.5.1.Les différentes étapes de la commande
floue :
On distingue classiquement les étapes ci-dessous dans la
structure d'un contrôleur flou[27]:
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
98
? l'identification des variables pour d'entrée et de
sortie.
? la construction de règles de contrôle.
? établir l'approche pour décrire l'état du
système en termes de sous-ensembles flous, soit
établir méthode de Fuzzification et fonctions
d'appartenance floues.
? sélection de la règle compositionnel
d'inférence.
? méthode La défuzzification est l'étape qui
permet de transformer l'ensemble flou, obtenu
par le calcul précédent, en une grandeur de
commande à appliquer au processus.
Dans la section suivant, on peut expliquer les étapes
précédentes avec PSS basés sur la logique
floue.
IV 6.PSS basés sur la logique floue :
Le stabilisateur de système de puissance est
utilisé pour améliorer le rendement du générateur
synchrone. Cependant, il en résulte dans la mauvaise performance dans
diverses conditions de chargement qui a mis en oeuvre avec PSS
classiques. A cet effet, le besoin de logique floue PSS se pose.
Le contrôleur flou utilisé dans stabilisateur système
électro-énergétique est normalement une deux
entrées et une composante de sortie unique. C'est
généralement un système MISO. Les deux
entrées sont changement de vitesse angulaire et le taux de variation de
la vitesse angulaire tandis que la sortie du contrôleur logique floue est
un signal de tension. Une modification de la tension de la rétroaction
au système d'excitation en fonction de la puissance
accélération sur une unité est utilisée pour
améliorer la stabilité du système. Les signaux de
stabilisation sont calculés en utilisant les fonctions d'appartenance
floue standard en fonction de ces variables[27].
IV.6.1. Sélection de variables d'entrée et de
sortie :
On fait définir les variables d'entrée et de
contrôle, c'est-à-dire, déterminer quels états du
processus doivent être observées et doivent être
considérées comme des mesures de contrôle. Pour les
modèles FLPSS, l'accélération et la
déviation de vitesse du générateur peuvent être
observés et ont été choisis comme le signal
d'entrée du PSS floue. Les performances dynamiques du
système pourraient être évaluées par l'examen de la
courbe de réponse de ces deux variables. La tension est à la
sortie du contrôleur logique floue[27].
Pratiquement, la vitesse d'axe seulement est facilement
disponible. Le signal d'accélération peut être
dérivé des signaux de vitesses mesurées à deux
instants successifs d'échantillonnage à l'aide d'équation
au-dessous :
? ? ? ? ? ? ? ?
? ? k ? ? ? k ?
1
? ? k ?
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
IV.6.2.Fonction d'appartenance :
Les variables choisies pour ce contrôleur sont la
déviation de vitesse, d'accélération et de tension, en
cela, la déviation de la vitesse et l'accélération sont
les variables d'entrée et la tension est variable de sortie. Le nombre
de variables linguistiques décrivant les sous-ensembles flous d'une
variable varie en fonction de la demande (l'application).
Généralement, un nombre impair est utilisé. Un nombre
raisonnable est sept. Toutefois, la multiplication des sous-ensembles flous
entraîne une augmentation correspondante du nombre de règles.
Chaque variable linguistique a sa fonction d'appartenance floue. La fonction
d'appartenance mappe les valeurs nettes dans des variables de floues. Les
fonctions d'appartenance triangulaires sont utilisées pour
définir le degré d'appartenance. Il est important de ne pas que
le degré d'adhésion joue son rôle important dans la
conception[27] .
Un contrôleur flou. Chacune des variables
d'entrée et de sortie de flous est affecté sept sous-ensembles
flous linguistiques variant de grand négatif (NB) à grand positif
(PB). Chaque sous-ensemble est associé à la fonction de
d'appartenance triangulaire à partir d'un ensemble de sept fonctions
d'appartenance pour chaque variable floue.
|
NB
|
NECATIVE BIG
|
|
NM
|
NECATIVE MEDIUM
|
|
NS
|
NECATIVE SMALL
|
|
ZE
|
ZERO
|
|
PS
|
POSITIVE SMALL
|
|
PM
|
POSITIVE MEDIUM
|
|
PB
|
POSITIVE BIG
|
Tableau IV.3. Variables floues
pour la fonction d'appartenance.
Les variables sont normalisées en multipliant avec des
gains respectifs de K1, K2,K3, afin que leur valeur comprise entre -1
et 1. Les fonctions d'appartenance des variables d'entrée et de sortie
ont 50% de chevauchement entre les sous-ensembles flous adjacents
[27]. La fonction d'appartenance pour
l'accélération, la vitesse et la tension sont indiquées
à la figure suivant :
99
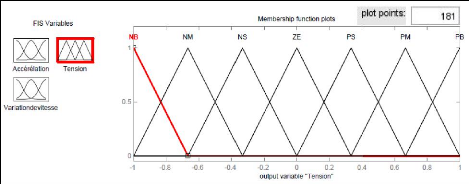
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
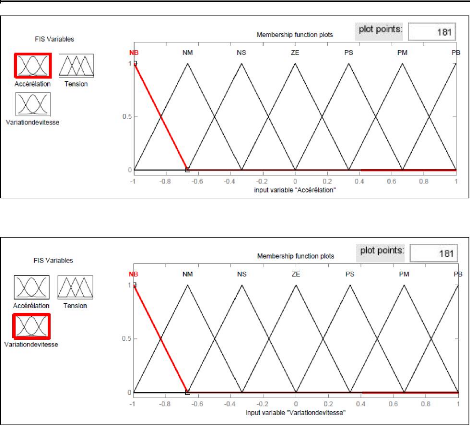
Figure VI.16. Fonctions
d'appartenance pour l'accélération.
Figure VI.17. Fonctions
d'appartenance pour la variation de vitesse.
100
Figure VI.18. Fonctions
d'appartenance pour la tension.
IV.6.3. La base de règles floues [48]:
Un ensemble de règles qui définissent la relation
entre l'entrée et la sortie de du contrôleur à
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
101
logique floue peut être trouvé utilisant la
connaissance disponible dans le domaine de concevoir PSS[27]
. Ces règles sont définies en utilisant les variables
linguistiques. Les deux entrées, la vitesse et
l'accélération, se traduisent (49) règles pour chaque
machine. Les règles typiques ont la structure suivante :
? Règle(1):
si la variation de vitesse est NB (NECATIVE BIG), ET
l'accélération est NB ALORS la tension (la sortie
de PSS floue) est NB.
? Règle(2): si la variation
de vitesse est ZE (ZERO), ET l'accélération est
NS (NECATIVE SMALL) ALORS la tension (la sortie de PSS
floue) est NS.
? Règle(3) : si la variation
de vitesse est PB (POSITIVE BIG), ET
l'accélération est NM (NECATIVE MEDIUM) ALORS
la tension (la sortie de PSS floue) est PM (POSITIVE
MEDIUM). Et ainsi de suite...
Toutes les 49 règles régissant le
mécanisme sont expliquées dans le tableau (IV.4), où tous
les symboles sont définis dans la terminologie de base de logique
floue.
|
Variation
de vitesse
|
Accélération
|
|
NB
|
NM
|
NS
|
ZE
|
PS
|
PM
|
PB
|
|
NB
|
NB
|
NB
|
NB
|
NB
|
NM
|
NM
|
NS
|
|
NM
|
NB
|
NM
|
NM
|
NM
|
NS
|
NS
|
ZE
|
|
NS
|
NM
|
NM
|
NS
|
NS
|
ZE
|
ZE
|
PS
|
|
ZE
|
NM
|
NM
|
NS
|
ZE
|
PS
|
PS
|
PM
|
|
PS
|
NS
|
ZE
|
ZE
|
PS
|
PS
|
PM
|
PM
|
|
PM
|
ZE
|
PS
|
PS
|
PM
|
PM
|
PM
|
PB
|
|
PB
|
PS
|
PM
|
PM
|
PB
|
PB
|
PB
|
PB
|
Tableau IV.4. Base de
règles de contrôleur a logique floue.
La sortie de stabilisateur est obtenue en appliquant une
règle particulaire exprimée sous forme de fonctions
d'appartenance. Finalement l'appartenance de sortie de la règle est
calculée. Cette procédure est suivie pour toutes les
règles et avec chaque règle un résultat est obtenu.
Nous utilisons le mécanisme d'inférence le plus
couramment utilisé est celui dit « de Mamdani ».
Précédemment, on peut connaître les étapes
(Fuzzification, dégrée d'activation, implication et
agrégation).
IV.6.4.Défuzzification :
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
Généralement, la solution d'un problème
utilisant les ensembles flous, est un résultat exprimé en termes
de valeurs floues (fonctions d'appartenance). D'autre part, pour exploiter ou
appliquer physiquement ces résultats, on doit utiliser des valeurs
ordinaires. Cette opération qui consiste à convertir les valeurs
floues en valeurs ordinaires, s'appelle la défuzzification.
La méthode de défuzzification la plus
utilisée est certainement, la méthode du centre de
gravité, dont le principe est de prendre l'abscisse du centre de
gravité de la surface de la fonction d'appartenance
résultante.
Dans le cas d'un univers de discoures discret, cette
méthode donne :
avec : (IV.2)
Cependant, cette méthode de défuzzification est
parfois complexe et demande des calculs importants. C'est pour cette raison
qu'on utilise souvent une autre méthode plus simple qui est la
méthode du maximum, dont le principe est de prendre l'abscisse du
maximum de la fonction d'appartenance résultante
[43].
IV.6.5.la mise en oeuvre de la logique floue[48]:
La représentation de diagramme bloc du contrôleur
à logique floue mise en application sur simple machine
(générateur synchrone) a connecté au réseau infini.
Comme dans la figure suivante :
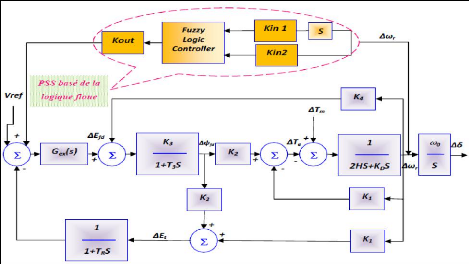
Figure IV.19. Exécution de
contrôleur de logique floue.
102
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
IV.7.Résultat et discision :
On prend dans cette partie le système
(générateur a connecté au réseau infini), pour
faire la simulation. Les paramètres du système et des
régulateurs existent dans l'annexe.
IV.7.1.Exécution du système avec les
différentes fonctions d'appartenances :
A l'aide de programme MATLAB/sumulink, nous exécutons le
modèle de la figure (IV.19) pour les différents fonctions
d'appartenance.
Les fonctions d'appartenances qui ont été choisis
sont les suivants :
· triangulaire (trimf).
· trapézoïdale (trapmf).
· gaussienne (gaussmf).
· gaussienne (gauss2mf).
· sigmoïdes (psigmf).
Cette représentation du réseau SMIB+FuzzyPSS dans
la figure (IV.20).
> Paramètre schéma bloc de simulation:
K1=0.7635, K2=0.8643, K3(exciter gain)=0.3230, K4=1.4188, K5 =
0.1462, K6=0.4166, Kin1=1.6 , Kin2=29.56
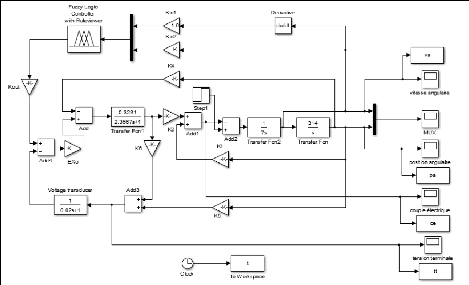
Figure IV.20.
Représentation du réseau SMIB+FuzzyPSS sur
MATLAB/Simulink.
103
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
104
Les résultats de simulation pour chacun d'angle de charge,
de la vitesse angulaire, du couple électrique et de la tension terminale
montré au-dessous.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
trimf
|
|
|
|
|
|
|
|
|
|
|
psigmf
gaussmf
gauss2mf
|
|
|
|
|
|
|
|
|
|
|
trapmf
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 1 2 3 4 5 6 7 8 9 10
temps(s)
4
3.5
3
2.5
2
1.5
1
0.5
0
Figure IV.21. Présente la
variation de la position angulaire1.
|
|
|
|
|
|
|
|
|
trimf
|
|
|
|
|
|
|
|
|
|
psigmf
gausmf
|
|
|
|
|
|
|
|
|
|
gauss2mf
trapmf
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 1 2 3 4 5 6 7 8 9 10
temps(s)
0.03 0.025 0.02
0.015 0.01 0.005 0
-0.005 -0.01 -0.015 -0.02
Figure IV.22. Présente la
variation de la vitesse angulaire.
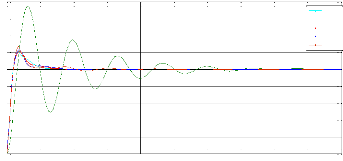
1.8
trimf psigmf gaussmf
gauss2mf trapmf
1.2
1
0.8
0.6
0.4
0.2
0
0 1 2 3 4 5 6 7 8 9 10
1.6
1.4
temps(s)
Figure IV.23. Présente la
variation du couple électrique.
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
0.4
0.35
0.3
0.25
0.2
0.15
0.1
0.05
0
-0.05
-0.1
0 1 2 3 4 5 6 7 8 9 10
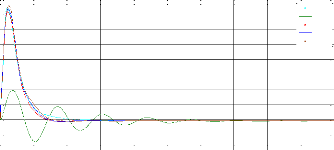
trimf psigmf gaussmf
gauss2mf trapmf
temps(s)
105
Figure IV.24. Présente la
variation de la tension terminale.
|
|
|
|
|
|
trimf
|
|
|
|
|
|
|
|
psigmf
gaussmf
|
|
|
|
|
|
|
|
gauss2mf
trapmf
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 0.5 1 1.5 2 2.5 3 3.5 4
temps(s)
0.03 0.025 0.02
0.015 0.01 0.005 0
-0.005 -0.01 -0.015 -0.02
Figure IV.25. Présente la
variation de la vitesse angulaire par rapport l'angle.
La fonction d'appartenance meilleure est
déterminée par l'application des critères temporels
intégraux.
D'après le tableau (IV.5), on peut dire que la
fonction d'appartenance triangulaire (trimf) est meilleur des autres,
puisque le système est d'autant mieux réglé et le
critère intégral est minimal.
Types de FA
|
trimf
|
psigmf
|
gaussmf
|
gauss2mf
|
trapmf
|
IAE
|
0.09975
|
0.1495
|
0.103
|
0.101
|
0.1066
|
ISE
|
0.008198
|
0.007102
|
0.007607
|
0.007546
|
0.008411
|
ITAE
|
0.1715
|
0.3273
|
0.1924
|
0.1986
|
0.2054
|
|
Tableau IV.5. Comparaison des
critères temporels intégraux
Au-dessous, nous représentons les résultats de
simulation pour la fonction d'appartenance triangulaire seulement.
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
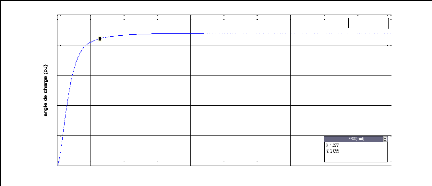
2.5
0.5
1.5
2
0
0 1 2 3 4 5 6 7 8 9 10
1
temps(s)
FPSS(trimf)
106
Figure IV.26.
Présente la variation de la position
angulaire.
14
x 10-3
12
10
8
6
4
2
0
-2
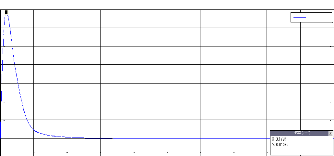
FPSS (trimf)
0 1 2 3 4 5 6 7 8 9 10
temps(s)
Figure IV.27. Présente la
variation de la vitesse angulaire.
1.4
1.2
1
0.8
0.6
0.4
0.2
0
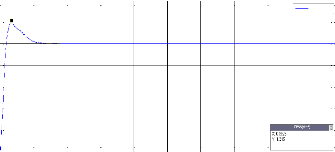
FPSS(trimf)
0 1 2 3 4 5 6 7 8 9 10
temps(s)
Figure IV.28. Présente la
variation du couple électrique.
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
0.4
0.35
0.3
0.25
0.2
0.15
0.1
0.05
0
-0.05
0 1 2 3 4 5 6 7 8 9 10
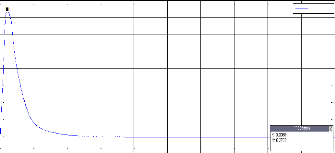
FPSS(trimf)
temps(s)
Figure IV.29.
Présente la variation de la tension terminale.
IV.7.2.Étude comparative entre la mise en oeuvre du
système aux différents cas : Nous avons comparé
entre les trois cas : où notre système est :
? sans régulateur PSS.
? connecté avec régulateur PSS
conventionnelle. ? connecté avec régulateur FLPSS
(PSS flou).
Simultanément, nous exécutons les schémas
blocs des figures (II.12), (II.11) et de la figure(IV.19), pour les mêmes
paramètres.
A partir des critères de performance, nous obtenons le
bon choix qui permettre à la bonne exploitation du système.
Les résultats de simulation dans les figures (IV.30),
(IV.31), (IV.32), (IV.33) et (IV.34) montré au-dessous, pour chacun
d'angle de charge, de la vitesse angulaire, du couple électrique et de
la tension terminale.
107
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
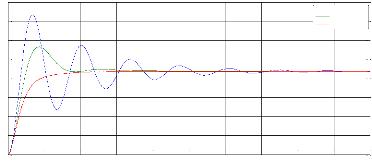
3.5
2.5
0.5
1.5
4
3
2
0
0 1 2 3 4 5 6 7 8 9
1
Sans PSS
Avec PSS
Avec FUZZY PSS
10
108
temps(s)
Figure IV.30. Présente la
variation de la position angulaire.
0 1 2 3 4 5 6 7 8 9 10
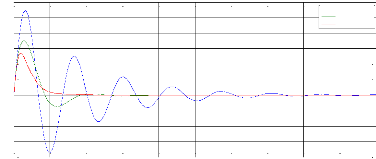
-0.005
-0.015
0.025
0.015
0.005
-0.01
-0.02
0.03
0.02
0.01
0
Sans PSS
Avec PSS
Avec FUZZY PSS
temps(s)
Figure IV.31. Présente la
variation de la vitesse angulaire.
0 1 2 3 4 5 6 7 8 9 10
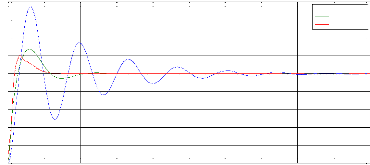
0.8
0.6
0.4
0.2
1.8
1.6
1.4
1.2
0
1
Sans PSS
Avec PSS
Avec FUZZY PSS
temps(s)
Figure IV.32. Présente la
variation du couple électrique.
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
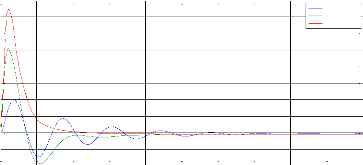
0 1 2 3 4 5 6 7 8 9 10
0.4 0.35 0.3 0.25
0.2 0.15 0.1 0.05
0
-0.05 -0.1
Sans PSS
Avec PSS
Avec FUZZY PSS
109
temps(s)
Figure IV.33. Présente la
variation de la tension terminale.
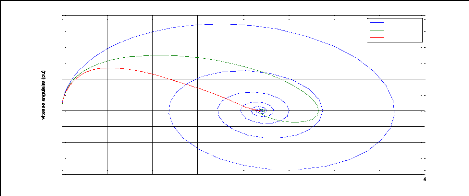
-0.005
-0.015
0.025
0.015
0.005
-0.01
-0.02
0.03
tr (5%)4.752
0.02
0.01
0
0 0.5 1
1.5
angle de charge (pu)
2
2.5 3 3.5
Sans PSS
Avec PSS
Avec FUZZY PSS
Figure IV.34. Présente la
variation de la vitesse angulaire par rapport l'angle.
Les deux tableaux ci-dessous montrent les paramètres
des critères, l'un des critères temporels instantanés et
l'autre des critères temporels intégraux.
Les cas
|
Sans PSS
|
Avec PSS
|
Avec FUZZY PSS
|
Les
courbes
|
8
|
w
|
T
|
8
|
w
|
T
|
8
|
w
|
T
|
Dp
|
1.419
|
0.0271
|
0.743
|
0.638
|
0.01833
|
0.304
|
0
|
0.01381
|
0.223
|
t p
|
0.6734
|
0.314
|
0.6331
|
0.8358
|
0.2658
|
0.5604
|
|
0.1822
|
0.3443
|
|
|
|
4.753
|
1.385
|
|
1.606
|
1.28
|
|
0.8491
|
|
Tableau IV.6. Comparaison des
critères temporels instantanés.
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
Les cas
|
Sans PSS
|
Avec PSS
|
Avec FUZZY PSS
|
IAE
|
0.1495
|
0.1169
|
0.09975
|
ISE
|
0.007102
|
0.007336
|
0.008198
|
ITAE
|
0.3273
|
0.2232
|
0.1715
|
|
Tableau IV.7. Comparaison des
critères temporels intégraux.
Lors nous déplaçons le FLPSS au
système, ce dernier va à la stabilité tôt ( pour
l'angle de
charge). Par contre, les courbe d'angle pour les cas sans
PSS et avec PSS conventionnel sont
stable au ( et ) respectivement.
Du tableau (IV.7) on peut vérifier que le système
avec FLPSS mieux réglé, parce que l'intégrale
de l'erreur absolue est minimale par rapport les autres cas (
),
aussi l'intégrale de l'erreur absolue
pondérée par le temps est minimale ).
Le régulateur floue est utilisé pour pouvoir
ajuster le système rapidement (temps de réponse très
court) par rapport au régulateur classique et de maintenir la tension
proche de sa référence
avec un minimum de dépassement.
110
CHAPITRE IV PSS a basé sur la logique
floue(FUZZY)
111
IV 8.Conclusion :
Parmi les techniques de l'intelligence artificielle, la logique
floue permet de modéliser puis de remplacer l'expertise de conduite de
processus, expertise en provenance du concepteur ou de l'utilisateur.
Dans ce chapitre, nous présentons la théorie des
ensembles floue et nous également expliquons le principe du
contrôleur flou.
En termes de la simulation, nous exécutons du
système avec différents fonctions d'appartenances :
· triangulaire (trimf).
· trapézoïdale (trapmf).
· gaussienne (gaussm).
· gaussienne (gauss2mf).
· sigmoïdes (psigmf).
Ainsi nous avons comparés entre la mise en oeuvre du
système :
· sans régulation PSS.
· avec régulation PSS conventionnel.
· avec régulation PSS basé de la
logique floue.
Il peut être conclu que la performance de la FPSS
proposé est beaucoup mieux et les oscillations sont amorties
beaucoup plus rapide.

Chapitre 5
Stabilisation d'un Système
multi-machines
CHAPITRE V Stabilisation d'un
Système multi-machines
113
V.1.Introduction :
L'un des problèmes les plus importants, lors de
l'étude d'un système électro-énergétique
complexe, est celui de sa stabilité. Ceci est dû au
développement important des systèmes. L'étude et l'analyse
du comportement des systèmes face à de faibles ou importantes
perturbations ont été l'objet de nombreuses recherches utilisant
différentes méthodes, indirectes ou directes et récemment
par l'emploi de nouvelles techniques telles que les logique floue, en
l'occurrence les réseaux de neurones artificiels « RNA
».
Le but principal de ce chapitre consiste à traiter le
problème de la stabilité transitoire dans les systèmes
multi-machines par deux méthodes différentes, à savoir la
méthode logique floue (FUZZY) et celle de PSS et
comparer avec sans PSS.
La validation des 2 méthodes proposées sera
effectuée par voie de simulation basée sur le logiciel MATLAB
13.
A la fin de ce chapitre nous avons déterminé la
meilleur méthode pour obtenir l'amortissement des oscillations.
CHAPITRE V Stabilisation d'un Système
multi-machines
114
V.2. Description du réseau étudié
:
Le réseau test se compose de deux zones totalement
symétriques reliés entre-elles par deux lignes en
parallèle de 220 km de longueur avec une tension nominale de
230 kV, figure (V.1). Il a été spécifiquement
conçu [6] pour étudier les oscillations
électromécaniques de basse fréquence dans les grands
systèmes électriques interconnectés. Malgré sa
petite taille, il imite très bien le comportement des systèmes
typiques en fonctionnement réel. Chaque zone est équipée
de deux générateurs identiques de 20 kV/900 MVA. Les
machines synchrones ont des paramètres identiques sauf pour les inerties
qui sont H = 6.5 s dans la zone 1 et H = 6.175 s dans la zone
2. La charge est représentée par une impédance constante
partagée entre les zones de telle manière que la zone 1 exporte
400 MW vers la zone 2. Vu que la charge maximale d'une seule ligne est
d'environ 140 MW, le système est un peu stressé,
même dans l'état statique. Le jeu de barres auquel est
connecté le générateur G1 est
considéré comme le jeu de barres de référence. Des
batteries de condensateur sont installées dans chaque zone afin
d'améliorer le profil de tension pour qu'elle soit proche de
l'unité relative dans les deux zones.
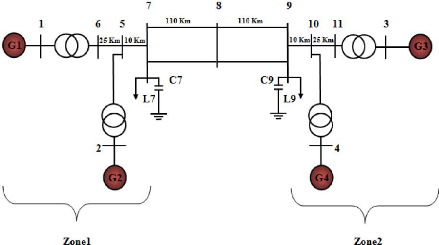
Figure V.1.
Représentation schématique des deux
régions du système étudié.
V.3. Amortissement des oscillatoires
inter-régions[44]:
Les échanges croissants d'énergie font
apparaître des oscillations de puissance, nommées «
oscillations inter-régions ». Ces oscillations
électromécaniques sont visibles par l'oscillation de la vitesse
ou l'angle des arbres des générateurs d'au moins deux
régions mais aussi par l'oscillation de la puissance transitant sur les
lignes du réseau [45]. Les oscillations
inter-régions limitent la
CHAPITRE V Stabilisation d'un Système
multi-machines
115
production d'énergie par les machines ainsi que le
transport d'énergie, entre autre à cause de l'écart des
oscillations qui dépasse la capacité de production des
générateurs, et augmentent les risques d'instabilité.
Pour mieux représenter ce phénomène
d'oscillations inter-régions, on prend souvent un exemple
mécanique analogue figure (V.2): celui de deux chariots reliés
par un ressort, oscillants en opposition de phases, chaque chariot
représentant un groupe de machines cohérentes (c'est à
dire avec des angles internes «en phases ») et le ressort
représentant les lignes [46].
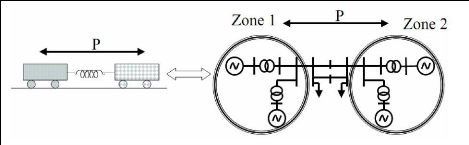
Figure V.2.Exemple
mécanique analogue aux oscillations inter-régions. Rappelons
que sur un réseau électrique il existe trois principaux types de
mode d'oscillation:
· Les modes dits sous-synchrones où les
oscillations se font à une fréquence relativement
élevée, sujet non traité dans notre étude (21,5 Hz)
;
· Les modes dits locaux où une machine oscille
seule contre une autre machine du même site ou contre le reste du
réseau (2 l,0 Hz) ;
· Les modes dits inter-régions (ou interzones)
où un groupe de machines cohérentes oscille contre un autre
groupe (de 0,1 à 1 Hz).
L'amortissement des oscillations inter-régions peut se
faire de trois façons principales:
· Soit par des lignes THT (Très Hautes
Tensions) en ajoutant des lignes supplémentaires, c'est la solution la
plus coûteuse;
· Soit par des dispositifs FACTS (Flexible
AC Transmission System), placés sur les lignes les plus
contraintes, ce sont des injecteurs de puissance réactive
[47]; nous ne nous intéresserons pas à ce type
d'amortissement dans cette thèse.
· Soit par des PSS (Power System
stabilizer) [30] couplés à des AVR
(Automatic Voltage Regulator) qui agissent sur la tension d'excitation de la
machine synchrone : c'est la solution conventionnelle.
CHAPITRE V Stabilisation d'un Système
multi-machines
116
Nous pouvons également amortir les oscillations
inter-régions par les correcteurs non linéaires : c'est cette
solution que nous testons ici.
V.4.. Intérêt de l'amortissement des
oscillations inter-régions[44]:
Dans les réseaux électriques, les marges de
transmission de la puissance (la différence entre la limite thermique et
l'utilisation « normale ») sont amenées à être de
plus en plus réduites, la consommation augmentant, et les structures de
production et de transport se développant peu, pour des raisons de
rentabilité économiques mais aussi écologiques. On
perçoit dès lors l'intérêt de nouvelles technologies
permettant de se rapprocher des limites thermiques des réseaux
déjà en places.
L'augmentation de la stabilité des réseaux
électriques par l'amortissement des oscillations inter-régions,
permet tout en gardant une marge de sécurité équivalente,
de réduire les marges de transmission de puissance.
V.5. Résultats de simulation et discision :
Le modèle de système de puissance de quatre
machines montré dans la figure (V.1) a été choisi pour
évaluer la performance et l'efficacité du stabilisateur
proposé pour l'amortissement des oscillations locales et
interzones[44]. La performance obtenue avec le stabilisateur
proposé PSS est comparée à celles obtenues en
utilisant un logique floue (FUZZY), sous différentes
contingences. Une représentation schématique du diagramme d'un
générateur est montrée dans la figure (V.3).
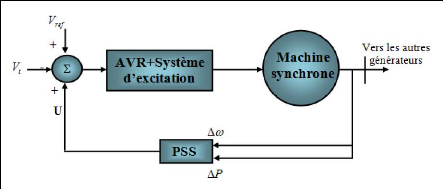
Figure V.3. Configuration d'un
générateur équipé supplémentaire
stabilisateur.
La représentation du système multi-machines
été faite en utilisant l'environnement MATLAB-Simulink version
8.1.0(R3112a), comme figure(V.4) suite .
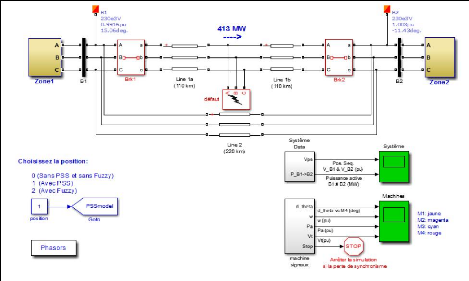
CHAPITRE V Stabilisation d'un Système
multi-machines
117
Figure V.4. Représentation
du réseau test sur MATLAB/Simulink. V.5.1. Système
sans stabilisateur :
Nous étudions en premier lieu le fonctionnement du
système sans PSS. La perte de stabilité du
système aux grandes perturbations conduit évidemment à la
présence de modes d'oscillations électromécaniques
fortement instables. Nous appliquons un défaut triphasé sur la
ligne 7-8 suivi par une élimination du défaut. les tensions des
bus(1 et 2) , puissances électriques, les réponses des angles de
rotor , la variation de vitesse des générateurs et les tensions
terminale des générateurs suite au défaut choisi sont
montrées dans les figures suivant .
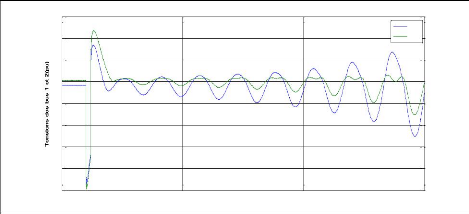
0.95
0.85
0.75
1.15
1.05
0.9
0.8
1.1
1
0 5 10 15
Sans PSS
Temps(s)
Bus 1
Bus 2
Figure V.5. Présente la
variation des tensions des bus(1 et 2) .
800
700
600
500
400
300
200
100
0
-100
CHAPITRE V Stabilisation d'un Système
multi-machines
Sans PSS
Pa
0 5 10 15
Temps(s)
118
Figure V.6. Présente la
variation de Puissance active de ligne(B1 à B2).
Sans PSS
Générateur 1
Générateur 2
Générateur 3
0 5 10 15
Temps (s)
100
80
60
40
20
0
-20
Figure V.7. Présente la
variation des angles de rotors des générateurs vs G4.
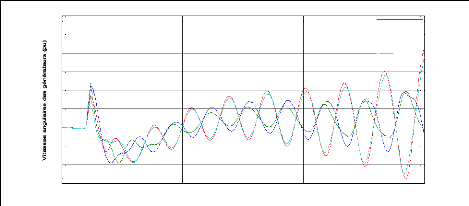
0.998
0.996
0.994
1.012
1.008
1.006
1.004
1.002
1.01
1
0 5 10 15
Sans PSS
Temps (s)
Générateur 1
Générateur 2 Générateur 3
Générateur 4
Figure V.8. Présente la
variation de Vitesses angulaires des générateurs.
CHAPITRE V Stabilisation d'un Système
multi-machines
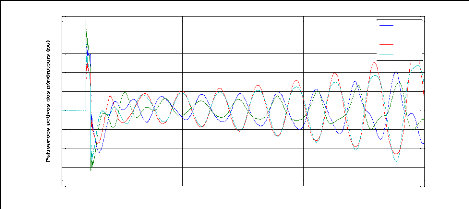
-0.1
-0.2
-0.3
-0.4
0.5
0.4
0.3
0.2
0.1
0
0 5 10 15
Sans PSS
Temps (s)
Générateur 1
Générateur 2 Générateur 3
Générateur 4
119
Figure V.9. Présente la
variation des Puissances actives des générateurs.
Sans PSS
Générateur 1
Générateur 2 Générateur 3
Générateur 4
0 5 10 15
Temps (s)
1.3
1.25
1.2
1.15
1.1
1.05
1
0.95
0.9
0.85
0.8
Figure V.10. Présente la
variation des Tensions terminale des générateurs.
La figure (V.7) montre bien que les modes instables
mènent à un écart croissant des angles de rotor et par
conséquent à la perte de la stabilité du
système.
Pour rétablir la stabilité du système et
améliorer l'amortissement des modes électromécaniques, les
stabilisateurs (PSS et FUZZY) sont maintenant ajoutés
aux générateurs.
V.5.2. Evaluation de performance et comparaison :
Pour évaluer la performance des différents
stabilisateurs des simulations temporelles du système sont
effectuées en considérant le modèle non linéaire
pour ces différents méthodes en présence d'une grande
perturbation transitoire[44], même travail dans la
partie précédente , nous devrons dans cette partie en y ajoutant
les stabilisateurs PSS et FUZZY et Il note avec satisfaction
que
CHAPITRE V Stabilisation d'un Système
multi-machines
120
nous les méthodes sont dus à la stabilité
du système sur la situation moins longtemps moindre perturbation.
V.5.2.1. Résultats de simulation:
? Les tensions des bus(1 et 2) :
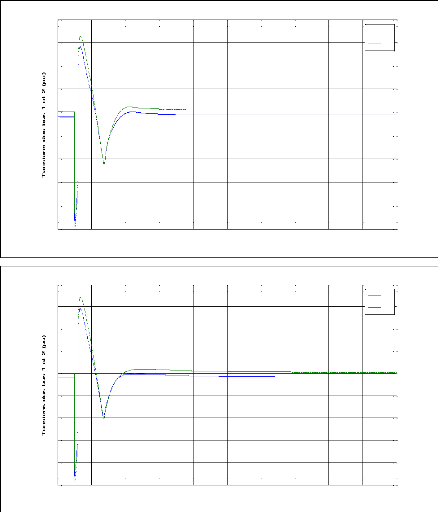
Avec PSS
1.2
1.15
1.1
1.05
1
0.95
0.9
0.85
0.8
0.75
Bus 1
Bus 2
0 2 4 6 8 10 12 14 16 18 20
Temps(s)
Avec Fuzzy
1.2
1.15
1.1
1.05
1
0.95
0.9
0.85
0.8
0.75
Bus 1
Bus 2
0 2 4 6 8 10 12 14 16 18 20
Temps(s)
Figure V.11. Présente la
variation des tensions des bus(1 et 2) .
CHAPITRE V Stabilisation d'un Système
multi-machines
121
? Puissance active de ligne(Bus1 à Bus2)
:
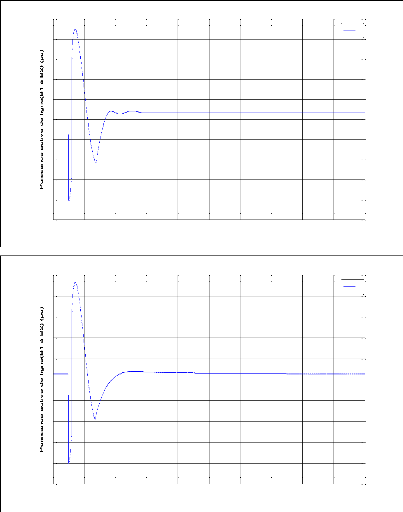
Avec PSS
650
600
550
500
450
400
350
300
250
200
150
Pa
0 2 4 6 8 10 12 14 16 18 20
Temps(s)
Avec FUZZY
650
600
550
500
450
400
350
300
250
200
150
Pa
0 2 4 6 8 10 12 14 16 18 20
Temps(s)
Figure V.12. Présente la
variation de Puissance active de ligne(B1 à B2).
CHAPITRE V Stabilisation d'un Système
multi-machines
122
? Angles de rotors des générateurs
vs générateur n°4 :
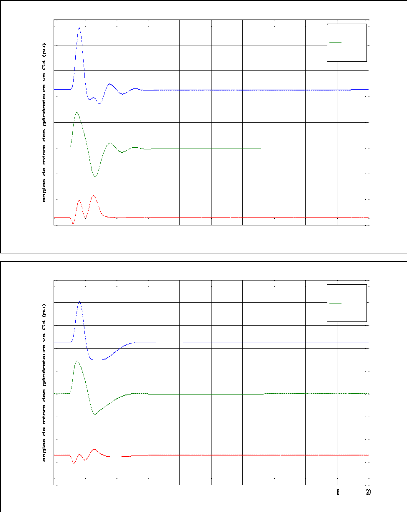
Avec PSS
50
45
40
35
30
25
20
15
10
Temps(s)
0 2 4 6 8 10 12 14 16 18 20
Générateur 1
Générateur 2
Générateur 3
Avec FUZZY
0 2 4 6 8 10 12 14 16 1
50
45
40
35
30
25
20
15
10
5
Générateur 1
Générateur 2
Générateur 3
Temps(s)
Figure V.13. Présente la
variation des angles de rotors des générateurs vs G4.
CHAPITRE V Stabilisation d'un Système
multi-machines
123
? Vitesses angulaires des
générateurs :
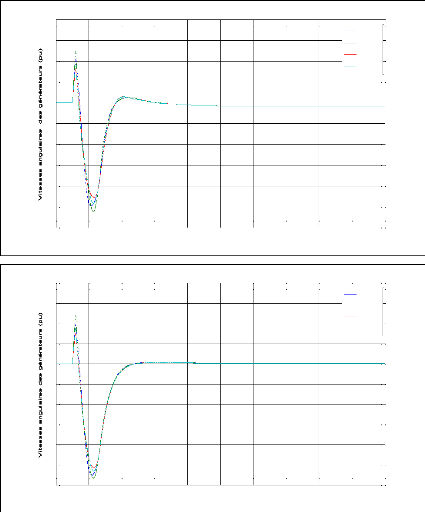
Avec PSS
1.008
1.006
1.004
1.002
1
0.998
0.996
0.994
0.992
0.99
0.988
Générateur 1
Générateur 2 Générateur 3
Générateur 4
0 2 4 6 8 10 12 14 16 18 20
Temps(s)
Avec FUZZY
1.008
1.006
1.004
1.002
1
0.998
0.996
0.994
0.992
0.99
0.988
Générateur 1
Générateur 2 Générateur 3
Générateur 4
0 2 4 6 8 10 12 14 16 18 20
Temps(s)
Figure V.14. Présente la
variation de Vitesses angulaires des générateurs.
CHAPITRE V Stabilisation d'un Système
multi-machines
124
? Puissances actives des
générateurs :
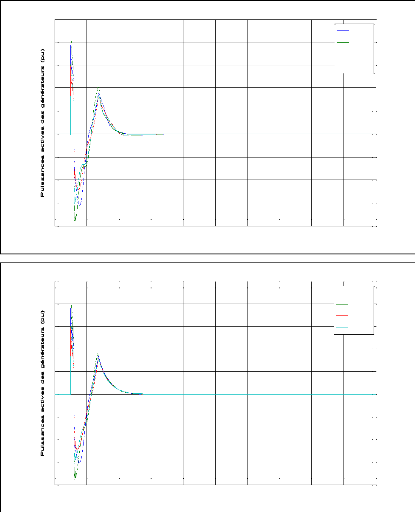
Avec PSS
générateur 1
générateur 2 générateur 3
générateur 4
0 2 4 6 8 10 12 14 16 18 20
Temps(s)
0.5
0.4
0.3
0.2
0.1
0
-0.1
-0.2
-0.3
-0.4
Avec FUZZY
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Générateur 1
Générateur 2
|
|
|
|
|
|
|
|
|
|
|
Générateur 3
Générateur 4
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 2 4 6 8 10 12 14 16 18 20
Temps(s)
0.5
0.4
0.3
0.2
0.1
0
-0.1
-0.2
-0.3
-0.4
Figure V.15. Présente la
variation des Puissances actives des générateurs.
CHAPITRE V Stabilisation d'un Système
multi-machines
125
? Tensions terminale des
générateurs :
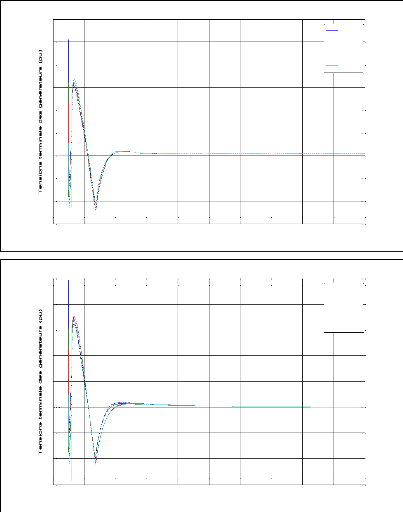
Avec PSS
Générateur 1
Générateur 2 Générateur 3
Générateur 4
0 2 4 6 8 10 12 14 16 18 20
Temps(s)
1.3
1.25
1.2
1.15
1.1
1.05
1
0.95
0.9
0.85
Avec FUZZY
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Générateur 1
Générateur 2
|
|
|
|
|
|
|
|
|
|
|
Générateur 3
Générateur 4
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 2 4 6 8 10 12 14 16 18 20
Temps(s)
1.25
1.2
1.15
1.1
1.05
1
0.95
0.9
0.85
Figure V.16. Présente la
variation des Tensions terminale des générateurs.
CHAPITRE V Stabilisation d'un Système
multi-machines
126
On constante clairement que le temps critique du réseau
étudié avec logique floue « FUZZY » est
supérieur au temps critique du système étudiée avec
PSS c'est-à-dire le FUZZY augmente le temps critique
du réseau avec maintenir du synchronisme des générateurs
après une perturbation, on remarque aussi dans les
figures(V.11,V.12,V13,V14 ,V.15,V.16),l'amortissement des oscillations dans le
cas de réseau étudié avec FUZZY par contre le cas
du réseau avec PSS on remarque des oscillations , durant la
première oscillation (pendant le défaut) , le
générateur est soumis à une variation considérable
de sa puissance électrique et l'accélération (ou
décélération) du son rotor.
Le PSS et FUZZY se produisent un signal
supplémentaire qui est la tension de stabilisation , ce signal est un
entrée à système d'excitation puissance peut faire varier
très rapidement la tension interne du générateur , durant
cette. Ceci va augmenter la puissance électrique et le couple
synchronisme produits pendant la première oscillation. Par
conséquent ,la puissance électromagnétique disponible va
entrainer une diminution importante de l'accélération du rotor et
de l'angle de rotor bien avant d'atteindre la limite de la stabilité
transitoire : la marge de stabilité sera donc
augmentée[5].
CHAPITRE V Stabilisation d'un Système
multi-machines
127
V.6.Conclusion :
Dans ce chapitre nous abordâmes à problème
de la stabilité transitoire dans les systèmes multi-machines par
deux méthodes différentes est un :
? Stabilisateurs de puissance conventionnel PSS(Power
System Stabilizers). ? Logique floue (Fuzzy logic).
après les résultats obtenus , on conclure qui
le FUZZY augmente la stabilité transitoire et réalise
l'objectif principal de la stabilité transitoire qui est la maintien
synchronisme des générateurs et permet le réseau pour
supporter les défauts le plus grand laps de temps possible , cela nous
permet la continuité du service.
128
Conclusion générale
Conclusion générale :
Les systèmes électro-énergétiques
ne cessent de se développer. L'extension des réseaux
interconnectés rend les systèmes fortement sensibles aux
oscillations interrégionales. Ces oscillations peuvent
sérieusement restreindre le transport de l'énergie
électrique. Elles peuvent également conduire à des
perturbations s'étendant à tout le système
électro-énergétique si, par exemple, une cascade de fautes
de lignes de transmission se produit. Dans ces nouvelles conditions, les
opérateurs des réseaux électriques se trouvent souvent
obligés à faire fonctionner les systèmes aux limites de la
stabilité. Par conséquent, l'amélioration de la
stabilité aux petites perturbations, en particulier l'amortissement des
oscillations interrégionales, représente un objectif
prioritaire.
Le travail présenté dans ce mémoire
concerne l'étude de la stabilité d'un système
électro-énergétique par méthodes stabilisateur de
puissance « PSS » et logique floue. Les PSS
représentent toujours un moyen efficace pour l'amortissement des modes
électromécaniques locaux, mais leur rôle dans
l'amortissement des modes interrégionaux est toujours
considéré comme de faible importance. Dans cette étude
nous avons montré que le méthode logique floue satisfaire aussi
bien l'amortissement des modes interrégionaux et l'amortissement des
modes locaux. Ainsi, l'optimisation simultanée de la localisation et des
paramètres des PSS et FUZZY permet installé
dans le système de participer, outre l'amortissement du mode local
associé à son générateur, à l'amortissement
des modes des autres régions.
Notre travail de recherche s'est articulé autour des
points suivants :
? la modélisation d'un système de puissance,
modélisation adaptée pour l'étude de stabilité aux
petites perturbations.
? les méthodes classiques de réglage et
d'emplacement des stabilisateurs PSS et les méthodes d'analyse
de la performance du système.
? L'application de la théorie des ensembles flous pour
l'amélioration de la stabilité du système, mini-machines
et multi-machines.
Dans la partie modélisation, nous avons
présenté les modèles mathématiques non
linéaires des éléments du système
électro-énergétique. Nous avons également
développé le modèle linéaire associé.
129
Conclusion générale
Nous avons aussi rappelé la théorie de la
stabilité, les problèmes de la stabilité aux petites
perturbations d'un système électro-énergétique et
le principe du stabilisateur PSS.
Les systèmes flous qui sont des approximations
universelles sont utilisés pour approximer le comportement dynamique non
linéaire inconnu du système de puissance en utilisant les
variables d'états mesurées directement comme des
entrées.
Afin d'évaluer les performances du stabilisateur
proposé face aux différents contingents couramment
rencontrés dans le réseau, deux systèmes
électro-énergétique, un réseau mono machine
reliée à un jeu de barre infini (SMIB) et un le
réseau test multi-machines comportant quartes machines et deux
régions on fait l'objet de simulation pour différents points de
fonctionnement.
Les résultats obtenus après élimination
de défaut montre que la logique floue « FUZZY »
assure une bonne tenue en stabilité et permet l'amortissement rapide et
efficacité des oscillations locales et interzones.
130
Bibliographie
[1]

Bibliographie
(Emira NECHADI, 2013)
«Commande et stabilité d'un Système
électro-énergétique» Doctorat en Science de
université Ferhat Abbas -- Setif UFAS (ALGERIE).
[2] (IEEE/CIGRE, 2004)
IEEE/CIGRE Joint Task Force on Stability Terms and
Definitions, « Definition and Classification of Power System Stability
», IEEE Trans. On Power Systems, vol. 19, n°. 2, pp.
1387-1401, May 2004.
[3] (Hasan ALKHATIB, 2008)
«Etude de la stabilité aux petites perturbation
dans la grands réseaux électriques» Doctorat de
l'université paul-Cézanne D'aix Marseille.
[4] (Djamel Eddine GHOURAF and Abdellatif NACERI,
3103).
Commande par PSS pour améliorer la stabilité du
système électro-énergétique, Acta
électrotechnica , Volume 54, Number 1, 2013.
[5] (Abdelwahab Smatti, 2012)
«Analyse de l'influence du PSS sur la stabilité
du réseau électrique sous Matlab simulink» Mémoire de
master de université Mohamed Kheider Biskra.
[6] (Kundur, 1994)
Kundur P., Power System Stability and Control. The
EPRI Power System Engineering Series, McGraw-Hill. Inc.1994.
[7] (Custem, 2002, II)
Custem T.V., Systèmes électriques de Puissance
II. Cours ELEC 047, Département d'Electricité, Electronique et
Informatique : Institut Montefiore, Université de Liège, 2002.
[8] (Basler et al., 2005)
Basler M.J. and Schaefer, R.C., « Understanding power
system stability », Proceedings of the 58th Annual Conference for
Protective Relay Engineers, pp. 46-67, April 2005.
[9] (Anderson et al., 2003)
Anderson P.M. and Fouad A.A., Power System Control and
Stability, IEEE. Press. 2003.
[10] (Gholipour Shahraki, 2003)
« Gholipour Shahraki E., Apport de l'UPFC à
l'amélioration de la stabilité transitoire des réseaux
électriques » Thèse de doctorat, Faculté des Sciences
& Techniques, Université Henri Poincaré, Nancy-I, 2003.
[11] (CIGRE, 1999)
CIGRE Task Force 38.02.17, 1999, Advanced Angle Stability
Controls, A Technical Brochure for International Conference on Large High
Voltage Electric Systems (CIGRE), December 1999.
[12] (IEEE/PES, 2002)
IEEE/PES Power systems stability subcommittee special
publication, Voltage Stability Assessment: Concepts, Practices and Tools,
technical report, sp101pss, Aug. 2002.
[13] (Passelergue, 1998)
Passelergue J.C., Interactions des dispositifs FACTS dans les
grands réseaux électriques, Thèse de doctorat, Institut
Nationale Polytechnique de Grenoble, 1998.
[14] (Andersson, 2006)
Andersson G., Modeling and analysis of Electric Power
Systems, Lectures 227-526, EEH Power Systems Laboratory, ETH, Zurich, March
2006.
[15] (M. Karim Sebaa, 2008).
«Commande intelligente pour l'amélioration de la
stabilité dynamique des réseaux d'énergie
électrique». Doctorat de Université des Sciences & des
Technologies Houari Boumediene(USTH) ALGER.
131
Bibliographie
[16] (Allenbach, 2005, I)
Allenbach J.M., Systèmes Asservis, Volume 1,
Asservissements linéaires classiques, Ecole d'Ingénieurs de
Genève, 2005.
[17] (Yee et al,2004)
Yee S.K. and Milanoviæ J.V., « Comparison of the
optimisation and linear sequential method for tuning of multiple PSSs ».
IEEE Power Engineering Society, General Meeting Denver, CO, June.
2004.
[18] (Singh, 2004)
Singh R., A Novel Approach for Tuning of Power System
Stabilizer Using Genetic Algorithm, Ph.D. Thesis, Faculty of Engineering,
Indian Institute of Science, Bangalore, July 2004.
[19] (Pal et al., 2005)
Pal B. and Chaudhuri B., Robust Control in Power
Systems, Springer Science + Business Media, Inc, 2005.
[20] (Aström et al., 1995)
Aström K. and Hägglund T., PID Controllers:
Theory, Design, and Tuning, Instrument Society of America, 1995.
[21] (DeMello et al., 1969)
DeMello F.P. and Concordia C., « Concepts of synchronous
machine stability as affected by excitation control », IEEE Trans. on
PAS, vol. PAS-88, pp. 316-329, 1969.
[22] (IEEE, 2003)
IEEE Task Force on Power System Stabilizers, « Overview
of Power System Stability Concepts », IEEE Trans. On Power
Systems, pp. 1762-1768, 2003.
[23] (Sauer et al., 1998)
Sauer P. and Pai M., Power System Dynamics and
Stability, Upper. Saddle River, NJ: Prentice-Hall, 1998.
[24] (Farmer, 2006)
Farmer R.G., Power System Dynamics and Stability, The
Electric Power Engineering Handbook, 2nd edition, CRC Press, Talyor &
Francis Group, LLC, 2006.
[25] (Custem, 2002, I)
Custem T.V., Systèmes électriques de Puissance
I. Cours ELEC 029, Département d'Electricité, Electronique et
Informatique : Institut Montefiore, Université de Liège, 2002.
[26] (IEEE, 2005)
IEEE, IEEE recommended practice for excitation system models
for power system stability studies, Institute of Electrical and Electronics
Engineers, Inc. USA, Std.421.5, 2005.
[27] (Neeraj gupta, 2008)
«fuzzy logic based power system stabilizer» Thesis
submitted in partial fulfillment of the drives university patiala-14704.
[28] (Rogers, 2000)
Rogers G., Power System Oscillations. Kluwer
Academic Publishers, Norwell, Massachusetts 2000.
[29] (Kundur et al., 1989)
Kundur P., Klein M., Rogers G.J. and Zywno M.S., «
Application of Power System Stabilizers for Enhancement of Overall System
Stability », IEEE Transaction on Power System, vol. 4, n°.
2, pp. 614-626. May, 1989.
[30] (Larsen et al., 1981, I)
Larsen E.V. and Swann D.A., « Applying power system
stabilizers part-I: General concepts », IEEE Trans. Power App.
Sys., vol.100, n°. 6, pp. 3017-3024, Jun. 1981.
[31] (Fleming et al., 1981).
Fleming R.J., Mohan M.A. and Parvatisam K., « Selection
of parameters of stabilizers in multi-machine power systems », IEEE
Transactions on Power Apparatus and Systems, vol. PAS-100, pp. 2329-2333,
1981.
[32] (Yu, 1983)
132
Bibliographie
Yu Yao-Nan, Electric Power System Dynamics, Academic
Press 1983.
[33] (Cai, 2004)
Cai L.J., Robust Coordinated Control of FACTS Devices in
Large Power Systems, Ph.D. Thesis, University of Duisburg-Essen, February
2004.
[34] (Larsen et al., 1981, III)
Larsen E.V. and Swann D.A., « Applying power system
stabilizers part-III: Practical considerations », IEEE Trans. Power
App. Sys., vol.100, n°. 6, pp. 3034-3046, Jun. 1981.
[35] (Pérez-Arriaga et al., 1982)
Pérez-Arriaga I.J., Verghese G.C. and Schweppe F.C.,
« Selective Modal Analysis with Applications to Electric Power Systems,
Part I: Heuristic Introduction », IEEE Trans. Power Apparatus and
Systems, vol. 101, pp. 3117-3125, Sept. 1982.
[36] (Hsu et al., 1987)
Hsu Y.Y. and Chen C.L., « Identification of Optimum
Location for Stabilizer Applications Using Participation Factors »,
IEE Proc., Pt. C, vol. 134, n°. 3, pp. 238-244, May 1987.
[37] (Tse et al., 1988)
Tse C.T. and Tso S.K., « Design optimization of power
system stabilizers based on model and eigenvalue-sensitivity analysis »,
IEE Proc. C. Gen. Trans. & Distrib., 135, (5), pp. 406-415,
1988.
[38] (Ostojic, 1988)
Ostojic D.R., « Identification of optimum site for power
system stabiliser applications ». IEE Proc, Pt. C, vol. 135,
n°. 5, pp. 416-419, September 1988.
[39] (Pagola et al., 1989)
Pagola F.L., Pérez-Arriaga I.J. and Verghese G.C.,
« On sensitivities, residues and participations: Applications to
oscillatory stability and control », IEEE Trans. Power Sys., vol.
4, n°. 1, pp. 278- 285, Feb. 1989.
[40] (Jin Lu et al., 1990)
Jin Lu, Hsiao-Dong Chiang and James S. Thorp, «
Identification of optimum site for power system stabilizer applications »,
IEEE Transactions on Power Systems, vol. 5, n°. 4, pp. 13021308,
November 1990.
[41] (Feliachi, 1990)
Feliachi A., « Optimal Siting of Power System
Stabilizers », IEE Proceedings, Pt. C, vol. 137, n°.2, pp.
101-106, March 1990.
[42] (F.Ghevri, et F.Guély, 1998)
Cahier technique Schneider n° 191.«La logique
floue».
[43] (Slimane Touil, 2010)
«Apport de PSS à la amélioration de la
stabilité transitoire d'un système électro
énergétique par différentes techniques
avancées» Mémoire de magister, Centre universitaire d'
eloued.
[44] (Kamel SAOUDI, 2014)
«Stabilisateurs intelligents des systèmes
électro-énergétiques» Doctorat en Science en
Electrotechnique de université Ferhat Abbas -- Setif 1 UFAS
(ALGERIE).
[45] (Lamine Mili,1997)
Opportunity study on the use of phasor measurement in an
interconnected power system, 1997.
[46] (Olof Samuelsson,1997)
Power System Damping : Structural aspects of controlling
active power, thèse à Lund, 1997.
[47] (N.G. Hingorani,1993)
Flexible AC Transmission, IEEE spectrum, vol. 30, pp. 40-45,
1993.
[48] (Oualid Haga, Lazhari Chekima,
2012)
«L'effet de l'intelligence artificielle sur le
système de puissance par rapport au conventionnel» Mémoire
de Master ,Université El'oued.

| 

