2.2.2.1 SPI Schnittstelle
DasSerial Peripheral Interface, abgekürzt SPI,
wurde im Jahr 1987 von der Firma Motorola entwickelt und verfügt über
drei Leitungen für eine serielle synchrone Datenübertragung zwischen
verschieden ICs.
(Serial Peripheral Interface - Mikrocontroller.net, 2019)
Es handelt sich um ein Master-Slave-Zugriffsverfahren,was
bedeutet, dass es einen Master, also Befehlenden, gibt (hier den Raspberry Pi),
der zyklisch die Verbindung mit anderen Teilnehmern bzw. Slave, also
Ausführenden,erstellt. Diesgeschieht mit Hilfe einer weiteren
CS - Leitung (Chip Select),die dazu dient, einzelne Teilnehmer zu
adressieren. Durch MOSI- und
MISO-Datenleitungen können Daten in beide Richtungen
gleichzeitig übertragen werden. Die Kommunikation erfolgt in Vollduplex
oder imGegenbetrieb. Der direkte Nachrichtaustausch zwischen einzelnen Slaven
ist nicht möglich. Das folgende Diagramm zeigt eine SPI-Bus-Kommunikation
mit zwei Slaves. Der Slave kann ein beliebiges Bauteil mit SPI Schnittstelle
sein.
(Kofler, Kühnast, & Scherbeck, 2018)
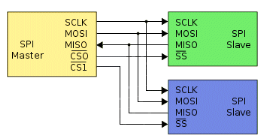
Abbildung 6: SPI-Bus mit einem
Master und zwei Slaven(Hochschule München, FK 04, Prof. Jürgen Plate,
2017).
SCLK: Serial Clock
MOSI: Master Out Slave In
MISO: Master In Slave Out
CS/SS: Chip Select/Slave Select
2.2.2.2 MCP-2515
1
2
13
12
3
5
11
8
9
10
4c
6
7
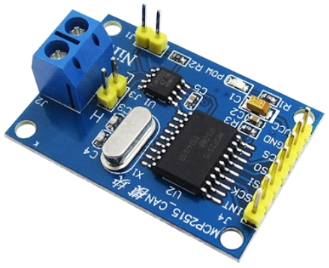
Abbildung7: Der MCP2515
CAN-Controller mit TJA1050 CAN-Transceiver(42project, 2019).
1:INT (Interrupt)
2: SCK (Serial Clock)
3: MOSI (Master Output Slave Input) SPI-Schnittstelle
4: MISO (Master Input slave Output)
5: CS (Chip Select)
6: GND (Ground)
7: VCC
8:MCP2515 Controller
9: TJA1050 CAN Transceiver
10: 8MHz Crystal
11: Jumper für120 Ohm Abschlusswiderstand
12: CAN High
13: CAN Low
Der MCP2515 (mit TJA1050 Transceiver)ist ein CAN-Bus-Modulmit
SPI-Schnittstellen. Dieser Baustein besteht aus einem CAN Controller(MCP2515)
und einemTransceiver (TJA 1050). Die Aufgabe der CAN Controllerbesteht
darin,das CAN-Protokoll zu implementieren, indem er dafür sorgt, dass
Daten rechtzeitig gesendet bzw. empfangen werden.Daten können mit einer
Bitrate von biszu1Mbits/s übertragen werden. DerTransceiver dagegen
wandelt das Signal von Steuergerät (Hier der Raspberry Pi) in die
Datenbusleitungen und empfängt die Daten von Slaven und wandelt sie
für den CAN-Controller um.(Wiesinger, 2018)
2.2.3 UART-Bus
Die UART-Schnittstelle bietet eine serielle asynchrone
Datenübertragung. Asynchron bedeutet, dass es kein-Tack Signal für
das Senden bzw. den Empfang einer Nachricht gibt. Dieses Bussystem dient zur
Kommunikation mit der RS232- und Rs485-Schnittstelle und benutzt für die
Kommunikation zwei Leitungen TxD (Transceiver Data) und RXD (Receiver Data).Die
UART-Schnittstelle istaktuell wegen ihres einfachen Aufbausund
ihrerZuverlässigkeitder Standard serieller Schnittstellen an PCs und
Mikrocontrollers.Damit der Datenaustausch erfolgreich funktioniert, ist es
erforderlich, dass Sender und Empfänger die gleiche
Übertragungsgeschwindigkeit (Baudrate)aufweisen.Der Aufbau einer Nachricht
mit der UART-Schnittstelle besteht aus bis zu 11 Bits. Die Nachricht beginnt
mit einem Startbit (dieser wird mit 0, Dominat Bit,gekennzeichnet), danach
folgen fünf bis max. acht Datenbits und sie endet mit einem Stoppbit, das
immer eine logische Eins erhält. Diese Start- und Stoppbits am Anfang und
Ende der Nachricht bilden dasKennzeichen für die Synchronisation
derDatenübertragung bei dem Universal Asynchronous Receiver
Transceiver.Damit Fehler erkannt werden, kann nach den Datenbits ein
Parität-bit gesendet werden(Schnell & Wiedemann, 2018).
Die folgende Abbildung zeigt einenausführlichen Aufbau
eines UART Frame.
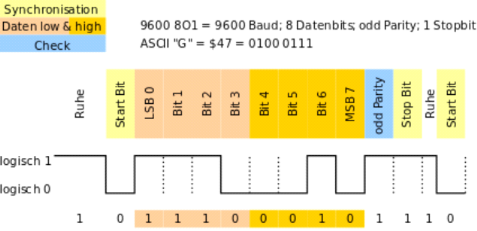
Abbildung 8: UART Frame
(buyzero, 2019)
| 

