|
Université de Gafsa

Institut Supérieur des Sciences Appliquées et de
Technologie de Gafsa
Département Informatique et
Télécommunications
Année universitaire : 2018/2019
|
|
Automatisation de fonctionnement du carrousel de
livraison
des bagages à l'arrivée de l'aéroport
international Tunis-
Carthage
|
|
Présenté et soutenu par :
Zarai Rayen
En vue de l'obtention de
Licence Appliquée en informatique industrielle
Sous la Direction de :
Mme Chorfi Haïfa
Soutenu le 29/06/2019
Devant le jury composé de :
Président : Mr Jmal Wasim
Rapporteur : Mme Alyaoui Nouha
Je dédie ce modeste travail à tous ce
qui me sont chers, à toutes les personnes qui
m'entourent avec l'amour et l'encouragement .
A mes chers parents , Mohamed et Chadlia que je ne
trouve pas les mots pour exprimer mes sentiments de gratitude et
d'amour .Je vous souhaite une bonne santé et une longue vie
.
A ma soeur Tasnim et mon Frère Sami qui sont ma
source d'optimisme.
Zarai Rayen
Dédicace
Remerciements
|
Je tiens tout d'abord à remercier vivement mes
enseignants à l'institut supérieur des sciences
appliquées et de technologie de Gafsa pour leurs
formations académiques, leurs qualités
professionnelles et leurs rigueurs.
En seconde lieu, je veux exprimer mes' reconnaissances et mes
respects les plus sincères pour mon encadrant monsieur
Laagueb Ahmed qui a veillé le bon déroulent
de mon stage, pour son sens
pédagogique, et ses conseils
précis. En outre, Je remercie ma encadrant madame Chorfi Haïfa pour
son aide et pour ses précieux conseils qui m'ont permis
l'accomplissement de ce travail. je n'oublie pas de remercier tous
qui m'ont aidé pour terminer ce stage avec
succès.
|
Keywords: automation, baggage handling system, programmable
logic controller, X-ray machine.
Résumé :
Le traitement des bagages ,c'est-à-dire scannage par
rayon-X et livraison de ces derniers à l'arrivé de
l'aéroport internationale de Tunis-Carthage se fait par un
système de type manuelle ce qui provoque beaucoup de problèmes .
ce rapport a été rédigé au cours d'une
période de stage effectuée à l'Office de l'aviation civile
et des aéroports de la Tunisie dans le cadre du projet de fin
d'étude, dans le but de résumer les travaux effectués et
requis dans le cahier des charges. Le projet consiste à faire une
étude et de proposer une solution d'automatisation du fonctionnement du
système de traitement des bagages à l'arrivée de
l'aéroport international Tunis-Carthage pour remédier aux
problèmes qu'il cause.
Mots clés : automatisme, système de traitement
de bagages, automate programmable industrielle, machine à rayon-X.
Summary:
Baggage handling, that is to say X-ray scanning and delivery
of the latter to the arrival of the international airport of Tunis-Carthage is
done by a manual type system which causes a lot of problems. This report was
written during a probationary period carried out at the Tunisian Civil Aviation
and Airports Office as part of the end of study project, in order to summarize
the work done and required in the specifications. The project is to study and
propose a solution to automate the operation of the baggage handling system on
arrival at Tunis-Carthage International Airport to remedy the problems it
causes.
Liste des figures
Figure 1:Convoyeur à bande 6
Figure 2:Machine à rayon-x 6
Figure 3:Table à rouleaux 7
Figure 4:Volet d'isolation 7
Figure 5:Carrousel 8
Figure 6:Cycle de traitement de bagage (a) 9
Figure 7:Cycle de traitement de bagage (b) 10
Figure 8:principe de fonctionnement en mode
semi-automatique 15
Figure 9:principe de fonctionnement en mode automatique
17
Figure 10:Machine asynchrone triphasé 20
Figure 11:Moteur asynchrone à cage
d'écureuil 21
Figure 12:raccordement d'une machine asynchrone au
réseau triphasé 22
Figure 13:dispositif en connexe avec la machine asynchrone
23
Figure 14:Variateur de vitesse et machine asynchrone
23
Figure 15:Principe de la variation de fréquence
24
Figure 16:Courant et tension en sortie du variateur
24
Figure 17:Mise en oeuvre d'un variateur 25
Figure 18:Motoréducteur brancher au machine
asynchrone 26
Figure 19:Roue motrice et roue menée d'un
motoréducteur 26
Figure 20:Illustration des avantages du variateur par
rapport au motoréducteur 28
Figure 21:Capteurs à faisceau direct 29
Figure 22:Capteurs
rétroréfléchissants 29
Figure 23:Capteurs à réflexion 30
Figure 24:Aspect extérieur d'un automate S7-200
CPU222 34
Figure 25:Structure interne d'un automates programmables
industriels 35
Figure 26:CPU 1511c-1 PN 37
Figure 27:Vue générale de tia portal
39
Figure 28:Armoire électrique de puissance
48
Figure 29:Porte de l'armoire électrique de
puissance 49
Figure 30:Armoire électrique de commande 50
Figure 31:Porte de l'armoire électrique de commande
51
Figure 33:Entré alimentation triphasé
76
Figure 34:Moteur du convoyeur d'injection et moteur de la
machine à rayon-X 76
Figure 35:Moteur du convoyeur transporteur et moteur de
carrousel 76
Figure 36:Les moteurs des deux volets 76
Figure 37:Le stabilisateur(transformateur + redresseur)
76
Figure 38:Schéma de commande numéro1
76
Figure 39:Schéma de commande numéro 2
76
Figure 40:Schéma de commande numéro 3
76
Figure 41:Schéma de commande numéro 4
76
Figure 42:Circuit de commande numéro 5 76
Figure 43:Schéma de commande numéro 6
76
Figure 44:Schéma de commande numéro 7
76
Figure 45:Schéma de commande numéro 8
76
Liste des tableaux
Tableau 1:Avantages et inconvénients des
différents types de photocellule 31
Tableau 2:Tableau d'inventaire 33
Tableau 3:Tableau des conditions d'activation et
désactivation des étapes 44
Tableau 4:Nomenclature des composants des schémas
électriques 45
Sommaire
Chapitre 1 : Contexte du stage et
problématique
I. Introduction 4
II. L'aéroport internationale Tunis-Cartage 4
III. L'OACA 4
III.1 Mission 4
III.2 Activités de l'OACA 4
III.3 Direction DSEEA 4
IV. Analyse fonctionnelle et descriptive du système
existant 5
IV.1 Description du système actuelle 5
IV.2 Constituant actuel du système de traitement de
bagages 5
IV.2.1 Le convoyeur a bande d'injection 5
IV.2.2 La machine à rayon-x 6
IV.2.3 Table à rouleaux 6
IV.2.4 Les volets d'isolation 7
IV.2.5 Le carrousel 8
IV.3 Principe de fonctionnement 8
V. Critique de cet ancien système 10
VI. Cadre du projet 11
VII. Travail demandé 11
VIII. Contrainte à respecter 12
IX. Produit attendu 12
X. Conclusion 12
Chapitre 2 : Méthodologie
I. Introduction 14
II. Description du nouveau Système 14
II.1 Présentation du nouveau système 14
II.2 Principe de fonctionnement 14
II.2.1 Mode semi-automatique 14
II.2.1.1 Critique de ce mode 16
II.2.2 Mode automatique 16
II.2.2.1 Avantage du nouveau système et importance de
résolution du problème 19
III. Etude électrique du nouveau système 20
III.1 Les machines électriques 20
III.1.1 Les moteurs asynchrones triphasées 20
III.1.1.1 présentation des moteurs asynchrone
triphasée 21
III.1.1.2 Le variateur du fréquence (variateur du
vitesse) 23
III.1.1.2.1 Principe de la variation de vitesse 23
III.1.1.2.2 Principe de la variation de fréquence 23
III.1.1.2.3 Choix d'un variateur 24
III.1.1.2.4 Mise en oeuvre d'un variateur 25
III.1.1.3 Les motoréducteurs 25
III.1.1.3.1 Fonctionnement et description 26
III.1.1.3.2 Explication et calcul 26
III.1.1.4 Avantage du variateur de vitesse par rapport aux
motoréducteurs 27
III.1.2 Les capteurs de présence (photocellule) 28
III.1.2.1 Présentation des capteurs photocellules 28
III.1.2.2 Choix des types des capteurs photocellule 30
IV. Etude automatique du nouveau système 31
IV.1 Tableau d'inventaire 31
IV.2 L'automate programmable industriel 33
IV.2.1 Présentation de l'automate programmable industriel
33
IV.2.2 Structure et composant des automates programmables
industriels 33
IV.2.3 Choix de l'automate programmable industriel 35
IV.3 Programmation 37
IV.3.1 Choix du langage de programmation 37
IV.3.2 Logiciel de programmation 38
IV.3.2.1 Présentations de tia portal 38
IV.3.2.2 Avantage de tia portal par rapport au step7 39
IV.3.3 Tableau des variables de l'API 40
IV.3.4 Grafcet 42
IV.3.5 Tableau des conditions d'activation et
désactivation des étapes 43
IV.3.6 Ladder 44
IV.3.6.1 Ladder des étapes 44
IV.3.6.2 Ladder des actions associés aux étapes
44
V. Conception électrique 44
V.1 Logiciel utilisé 44
V.2 Schéma électrique complet 45
V.2.1 Les schémas électriques du circuit de
puissance 45
V.2.2 Les schémas électriques du circuit de
commande 45
V.2.3 Nomenclature 45
VI. Conception d'une armoire électrique 46
VI.1 méthodologie de conception d'une armoire
électrique 46
VI.2 Logiciel utilisé (Autocad electrical) 46
VI.3 La compatibilité électromagnétique
46
VI.4 Les schémas des deux armoires électriques
(puissance et commande) 47
VII. Conclusion 52
Chapitre 3 : Résultats et commentaires
I. Introduction 54
II. Simulation du Nouveau système 54
III. Résultat et commentaire 69
IV. Conclusion 69
2018/2019 2 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
Introduction générale
L'automatisme industriel est l'ensemble des technologies
utilisant l'électronique, l'électrotechnique, la
mécanique, la télécommunication afin de concevoir des
machines ou des processus automatisés qui peuvent fonctionner sans
intervention humaine.
On retrouve l'automatisme industriel dans plusieurs secteurs
comme l'agroalimentaire avec les lignes de conditionnement et les machines
spéciales, la chimie, l'industrie pétrolière, les usines
de production d'électricité, l'industrie pharmaceutique etc....
L'automatisme industriel correspond aux automatismes séquentiels et
couvrent l'ensemble des systèmes de contrôle-commande permettant
de superviser ou de piloter une chaine de production.
En bref, automatisé un système industriel
consiste à transférer la totalité ou une partie des taches
des coordinations auparavant exécuté par l'opérateur
humain à un cerveau électronique.
L'avantage d'une telle procédure est d'accroitre la
production, améliorer la qualité d'un produit et permettre une
adaptation aux différents milieux. En outre, ces automatismes sont d'une
telle rapidité et d'une précision, qu'ils réalisent des
actions impossibles pour un être humain. Dans ce contexte que l'OACA
s'est investi et qu'elle a mis au point des projets de rénovations et de
mise à niveau de ses équipements. Dans ce projet, on
s'intéresse à l'automatisation du fonctionnement du carrousel du
livraison des bagages à l'arrivé de l'aéroport
international de Tunis-Carthage. Et pour effectuer ce projet il y a tout une
démarche à suivre. selon le cahier des charges et le guide de
rédaction du mémoire mon mémoire sera divisé en
trois chapitres. Le premier chapitre sera consacré à la
présentation de l'organisme qui m'a accueilli , le diagnostic du
système existant et le contexte su stage. le deuxième concernera
l'étude , la simulation et la réalisation du nouveau
système et la conception électrique Tandis que le 3éme
chapitre sera consacré à la présentation des
résultats obtenues par une simulation.
Chapitre 1 :
contexte du
stage et
problématique
2018/2019 4 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
I. Introduction
L'objective de ce chapitre est de présenter l'organisme
qui m'a accueilli , le diagnostic du
système de traitement de bagages existant et
l'elaboration du cahier des charges.
II. L'aéroport internationale
Tunis-Cartage
L'aéroport internationale de Tunis-Carthage est
situé à huit kilomètres au nord-est de
Tunis, il est mis en exploitation en 1940.
Comme la grande majorité des aéroports Tunisiennes,
l'aéroport est géré par l'OACA. Ce projet de fin
d'étude est effectué au sein de l'Aéroport International
Tunis-Carthage.
III. L'OACA
III.1 Mission
L'Office de l'Aviation Civile et des Aéroports (OACA) est
un établissement public à caractère
industriel et commercial doté de la personnalité
civile et de l'autonomie financière. Il est sous tutelle du
ministère de transport qui est chargé de gérer, de
développer et d'exploiter les 7 Aéroports internationaux de la
Tunisie (Tunis Carthage, Monastir Habib Bourguiba, Djerba-Zarzis, Tozeur-Nafta,
Tabarka, Sfax-Thyna et Gafsa-Ksar) ayant une capacité totale d'accueil
de 13 millions de passagers par an.
III.2 Activités de l'OACA
L'OACA à principalement trois objectifs à atteindre
:
· Accomplir la mission de la navigation aérienne
conformément aux normes internationales.
· Maintenir au plus haut niveau la sureté et la
sécurité des aéroports conformément aux
dispositions de la règlementation nationale et internationales.
· Veiller à l'adaptation des installations et des
infrastructures aéroportuaires au besoin du Traffic.
III.3 Direction DSEEA
La direction des services électriques et des
équipements aéroportuaires (DSEEA) est
considérée
comme étant l'une des plus importantes directions qui se
trouvent au sein de l'OACA. Cette direction assure la gestion de
l'énergie dans toutes ses formes électrique, hydraulique,
électromécanique, etc. Elle étudie, assiste et
réalise des extensions pour répondre aux besoins de
l'aéroport et des bureaux administratifs. Cette direction comporte trois
divisions :
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
Ø Division de la maintenance électrique : elle
assure la maintenance des équipements relatifs aux installations de la
moyenne tension.
Ø Division de la maintenance de climatisation : elle
s'occupe de réseau de climatisation dans les aéroports et dans
les bâtiments.
Ø Division de la maintenance des équipements
aéroportuaires : elle assure la maintenance ainsi que le bon
fonctionnement des équipements tels que la passerelle
télescopique, surpression d'eau les stations de pompages,etc...
IV. Analyse fonctionnelle et descriptive du
système existant
IV.1 Description du système actuelle
Le système de traitement des bagages à
l'arrivée du terminal I de l'Aéroport International
de Tunis-Carthage est conçue d'un convoyeur d'injection
de bagages, une machine à Rayon-X (MRX),une table à rouleaux,
deux volets d'isolation et un carrousel.
L'activation et désactivation de chacune de ces
composant se fait manuellement par un ouvrier permanant ce qui rend le
système lent et primitive. En outre ce système nécessite
des ouvriers de manutention pour mettre les bagages dans leurs places, soit sur
le convoyeur injecteur, soit sur le carrousel , soit sur une place
réservée pour les bagages suspects ce qui rend le travail trop
dur et ennuyeux.
IV.2 Constituant actuel du système de traitement de
bagages
IV.2.1 Le convoyeur a bande d'injection
Le convoyeur à bande d'injection est un convoyeur
motorisé situé au début de système,
les bagages sont mis sur lui par des agents de manutention
puis un autre agent fais le démarrage et l'arrêt de cette machine
manuellement par des boutons poussoirs.
2018/2019 5 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage

Figure 1:Convoyeur à bande
IV.2.2 La machine à rayon-x
La machine à rayon-x est placée juste
après le convoyeur à bande d'injection elle assure
la sureté dans l'aéroport permettant de
visualiser les objets contenus dans les bagages pour le contrôle
douanes.

Figure 2:Machine à rayon-x
IV.2.3 Table à rouleaux
La table à rouleaux est située juste après
la machine à rayon-x, il sert à porter les bagages
et les organiser en attendant à être
transporté sur le carrousel par un agent.
2018/2019 6 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage

Figure 3:Table à rouleaux
IV.2.4 Les volets d'isolation
Les volets d'isolation sont situés dans les
côtés gauche et droite du carrousel, et ils
servent à séparer la partie intérieure ou
s'effectue le scan des bagages et la partie extérieure où se
trouve les passagers en attente de prendre leurs bagages.

Figure 4:Volet d'isolation
2018/2019 7 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
IV.2.5 Le carrousel
Le carrousel est placé à la fin du
système, il assure la circulation des bagages devant les
yeux des passagers, qui sont venu de descendre de l'avion et
leurs permettre de collecter leurs bagages aisément.

Figure 5:Carrousel
IV.3 Principe de fonctionnement
Le cycle de traitement de bagages à l'arrivée de
l'aéroport internationale de Tunis-
Carthage est comme suit :
2018/2019 8 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
|
1-Un agent de manutention met les bagages sur le convoyeur
à bande d'injection, démarrage du convoyeur et
ouverture des volets
manuellement.
|
|
|

5- Les bagages tournent sur la carrousel en attendant
d'être collecter par les passagers.

3- Les bagages sortent du MRX
vers la table à
rouleaux où ils
seront organisés en attendant
d'être stransportés au
carrousel par un agent.
2- Le bagage est transporté par le convoyeur vers le
MRX pour les scans de douanes après le démmarage du MRX par un
policier.

|
4- Le bagage est
transpoerté au carrousel par un agent apès
l'appui sur le bouton marche du carrousel.
|
Figure 6:Cycle de traitement de bagage (a)
|
Remarque : si la
MRX détecte
quelque chose
interdite la
machine à rayon-X se met en arrêt
pour repasser une deuxième fois le bagage suspect dans la MRX par un
bouton qui
inverse le sens de rotation du moteur de l'MRX.
|
2018/2019 9 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage

Les bagages tournent sur le carrousel en attendant d'être
collecter par les passagers.
Organiser les
bagages sur la table à rouleaux en
attendant d'être
injecter au
carrousel par un agent.
Les volets sont ouverts lorsque le système est en
marche et fermés à l'arrêt manuellement par des boutons
poussoirs.
Scanner les bagages puis les transporter vers la table à
rouleaux.
Intervention d'un agent pour mettre du bagage sur le convoyeur
à bande d'injection, puis appuis sur le bouton marche du moteur M1
dédié au convoyeur d'injection et bouton marche
dédié au MRX.


MRX
Figure 7:Cycle de traitement de bagage (b)
V. Critique de cet ancien système
Le système de traitement de bagage à
l'arrivé de l'aéroport international Tunis-Carthage
est un système ancien commandé manuellement.
2018/2019 10 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
Sa commande est difficile et ennuyeuse, aussi elle
nécessite de charger des poids lourds par les agents de manutention.
En outre Les nouvelles exigences matérielles qui sont
fixées par les normes de la qualité imposants à l'OACA de
suivre ces normes et mettre à niveau ces équipements.
En ce qui suit une graphique illustrant les différents
problèmes de ce système.
Système de traitement de bagages
actuel
|
Augmentation de nombre de passagers
|
Bagages lourd
Pertes du temps des
passagers
Dégradation de la santé
des agents
de
manutention
VI. 2018/2019 11 Zarai Rayen
Cadre du projet
Le système de traitement de bagages à
l'arrivé de l'aéroport international Tunis-Carthage
est de type manuelle et l'injection du bagage sur le carrousel
se fait par un agent permanent. Afin d'améliorer le service on propose
d'automatiser ce système.
VII. Travail demandé
· Analyse fonctionnelle et descriptive du système
existant.
· Elaboration d'un cahier de charge répondant
à leurs besoins.
· Etude (electrique, automatique...), simulation et
réalisation du nouveau système en tenant compte du
sous-système installé.
· Elaboration d'un schéma électrique
complet (partie commande et partie puissance) et conception d'une armoire
électrique.
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
VIII. Contrainte à respecter
Le produit attendu doit être économe
d'énergie.
IX. Produit attendu
Système de traitement de bagages automatisé.
X. Conclusion
Dans ce chapitre j'ai présenté l'organisme qui m'a
accueilli en deuxième lieu, j'ai réalisé
l'analyse fonctionnel et descriptif du système de
traitement du bagage existant en montrant les caractéristiques de
chacune de ses constituants ainsi que le principe de fonctionnement du
système en tant qu'une seule unité et on a fini par critiquer ce
système. Vers la fin, on a mis notre
projet dans son cadre en élaborant le cahier des
charges.
2018/2019 12 Zarai Rayen
|
Chapitre 2 :
Méthodologie
|
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
I. Introduction
Dans ce chapitre on va étudier, simuler et
réaliser la solution proposée qui consiste à
automatiser le système de traitement de bagages en
tenant compte de l'ancien système. Premièrement, on va faire une
description du nouveau système puis on va étudier l'aspect
électrique et automatique de ce dernier, dernièrement on va
réaliser la conception électrique . Faire une étude de
l'aspect électrique est indispensable car il faut connaitre les machines
électriques pour commencer le processus de l'automatisation de notre
système ensuite on va réaliser la démarche
nécessaire pour automatiser l'ancien système.
II. Description du nouveau Système
II.1 Présentation du nouveau système
Le nouveau système sera constitué presque des
mêmes équipements (convoyeur à bande
d'injection, la machine à rayon-X, carrousel, volet
d'isolation) que l'ancien système avec la différence qu'on va
remplacer la table à rouleaux par un convoyeur à bande
transporteur qui sert à transporter les bagages vers le carrousel. Il
est comparable à le convoyeur à bande d'injection et il
opère de la même façon.
Le nouveau système opèrera de deux
manières soit semi-automatique c'est-à-dire solution
câblée à technologie électrique ou automatique
c'est-à-dire Solution programmée à technologie
électronique (API), le choix est à partir d'un commutateur comme
illustré dans l'annexe dans les schémas électriques.
II.2 Principe de fonctionnement
II.2.1 Mode semi-automatique
Dans ce mode tous les équipements sont commandés
par des boutons poussoirs (marche
ou arrêt). La figure suivante illustre leur principe de
fonctionnement.
2018/2019 14 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
|
|
Convoyeur à
bande d'injection
|
|
|
1-Mettre le bagage sur le convoyeur à bande d'injection
par un agent de manutention.
|
|
7- Démarrer le Moteur M1 du convoyeur à bande
d'injection par un bouton poussoir.
|
|
|

Volet d'isolation numéro 1
6- Démarrer la machine à rayon-X par un bouton
poussoir.
5- Démarrer le Moteur M3 du convoyeur à bande
transporteur par un bouton poussoir.
4- Démarrer le moteur M4 du carrousel par un bouton
poussoir.
Convoyeur à
bande
transporteur
Carrousel
MRX
3- Sirène d'alarme et gyrophare pendant 3 secondes.
Volet d'isolation numéro 2
2- Ouvrir les deux volets simultanément par un bouton
poussoir.
Figure 8:principe de fonctionnement en mode
semi-automatique
Remarque :
Ø Pour éviter la collision des bagages au
niveau de la point de convergence du convoyeur transporteur et le carrousel,
l'agent de commande doit vérifier si le carrousel est chargé ou
pas tant que le carrousel est chargé le convoyeur à bande
transporteur est dans l'état d'arrêt.
2018/2019 15 Zarai Rayen
2018/2019 16 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
Ø Si la machine à rayon-X détecte
quelque chose interdite le convoyeur à bande d'injection et la machine
à rayon-X se mettent en arrêt pour repasser une deuxième
fois le bagage suspect dans la MRX par un bouton qui inverse le sens de
rotation du moteur de l'MRX.
Ø La machine à rayon-X ne peut scanner qu'un
seul bagage à la fois.
Ø Cet ordre de démarrage est dû aux
faites que chaque équipement ne peut pas se mettre en marche que si
l'équipement qui le suive est en marche.
Pour le cycle de l'arrêt du système en mode
semi-automatique, il est comme suit : 1-Arrêter le convoyeur
à bande d'injection par un bouton poussoir.
2-Arrêter la machine à rayon-X par un bouton
poussoir.
3- Arrêter le convoyeur à bande transporteur par un
bouton poussoir.
4- Arrêter le carrousel par un bouton poussoir.
5-Sirène d'alarme et gyrophare.
6-Fermer les deux volets d'isolation.
Remarque :
Ø Cet ordre d'arrêt est dû aux faites
qu'on ne peut pas arrêter un équipement et l'équipement qui
la précède est en marche.
II.2.1.1 Critique de ce mode
Ce mode est trop antique et primitif. La solution et
d'intégré le mode automatique en parallèle.
II.2.2 Mode automatique
En mode automatique nous allons utiliser une automate
programmable industriel dont le choix
est précisé plus tard. Lorsque on tourne le
commutateur vers ce mode et on clique sur le bouton d'initialisation puis le
bouton départ de cycle à partir du système de supervision,
tout le système se met en marche d'une façon autonome. Le
principe de fonctionnement de ce mode est illustré par la figure
suivante.
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage

Capteur photocellule cp3 donne l'information à l'api
que le bagage est traité et sortie de l'MRX et que ce dernier est
capable d'accepter un autre bagage.
Deux capteurs photocellules cph1 et cpb1 qui détectent
la position du volet, soit haute ou basse.
Capteur photocellule cp2, lorsqu'il détecte un bagage,
l'api donne l'ordre d'arrêter le moteur du convoyeur à bande
d'injection M1 pour attendre le bagage afin qu'il sorte de l'MRX puisque ce
dernier ne peut traiter qu'un seul bagage à la fois.
Capteur photocellule cp4 au niveau du convoyeur à bande
transporteur et capteur photocellule cp5 au niveau du carrousel permettent
d'éviter les collisions au niveau du point de convergence.
Capteur photocellule cp1 qui détecte les bagages
posés sur le convoyeur à bande d'injection pour donner l'ordre de
départ de cycle ou bien s'il ne détecte aucun bagage pendant 5
min et le capteur situé au niveau du carrousel cp5 ne détecte
aucun bagage pendant 2 min et 48 s avec la condition qu'il n'existe aucun
bagage au niveau de cp2, cp3 et cp4, l'api donne l'ordre d'arrêter le
système.
Deux capteurs photocellules cph2 et cpb2 qui détectent
la position du volet, soit haute ou basse.
Figure 9:principe de fonctionnement en mode
automatique
2018/2019 17 Zarai Rayen
2018/2019 18 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
Cycle de démarrage du nouveau système
:
1-tourner le commutateur vers le mode automatique.
2-cliquer sur le bouton d'initialisation puis le bouton de
départ de cycle d'après l'écran de supervision.
3-les deux volets s'ouvre automatiquement en tournant les deux
moteurs M5 et M6 dans le sens de l'ouverture.
4-Sirène d'alarme et gyrophare pendant 3 secondes
5-le carrousel se met en rotation automatiquement par le
moteur M4.
6-synchronisation de démarrage des trois
équipements (le convoyeur à bande transporteur, la machine
à rayon-X et le convoyeur à bande d'injection ). Il est comme
suit :
Lorsque l'agent de manutention met le premier bagage sur le
convoyeur à bande d'injection ou bien il n'a un bagage qu'au niveau du
capteur cp1 le capteur cp1 détecte la présence du bagage, les
deux moteurs M2 et M1 se mettent en marche pour amener le bagage vers la
machine à rayon-x où le bagage se scanne , si le policier
n'appuie pas sur le bouton BMA(bouton marche arrière de l'MRX) donc le
bagage ne contient pas de l'interdit et il est amené vers le convoyeur
à bande transporteur est reste un certain temp bloqué au niveau
du capteur cp4 pour éviter son collision lorsqu'il s'injecte dans le
carrousel . Si le policier appuie sur le bouton BMA(bouton marche
arrière de l'MRX) c'est-à-dire le bagage est suspect donc il doit
se passer une deuxième fois dans la machine à rayon-X (MRX) en
tournant le moteur M2 de L'MRX dans le sens inverse, après le
deuxième scannage si l'MRX détecte pour la deuxième fois
un interdit le policier doit appuyer sur le bouton BSC (bouton stop convoyeur)
dans ce cas le bagage est transporté vers le convoyeur à bande
transporteur ou il sera bloqué un certain temp au niveau du capteur cp4
afin d'être enlevé par un agent de manutention , dans l'autre cas
si le policier n'appuie pas sur le bouton BSC (bouton stop convoyeur) le bagage
est amené vers le convoyeur à bande transporteur est reste un
certain temp bloqué au niveau du capteur cp4 pour éviter son
collision lorsqu'il s'injecte dans le carrousel. Lorsque le capteur CP5
situé au niveau du carrousel ne détecte aucun bagages pendant 4.8
s (le temp d'éloigner le bagage au niveau du carrousel pour
éviter la collision) et il y a un bagage au niveau des capteurs c4 ou
cp3 ou cp2, le moteur M3 du convoyeur à bande transporteur se met en
marche pour transporter le bagage vers le carrousel s'il existe .Après
le bagage en train d'être scanner au niveau de l'MRX s'il existe est
2018/2019 19 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
traité comme mentionné auparavant
c'est-à-dire (si le policier n'appuie pas sur le bouton BMA `bouton
marche arrière de l'MRX' donc le bagage ne contient pas de l'interdit et
il est amené vers le convoyeur à bande transporteur est reste un
certain temp bloqué au niveau du capteur cp4 pour éviter son
collision lorsqu'il s'injecte dans le carrousel . Si le policier appuie sur le
bouton BMA 'bouton marche arrière de `l'MRX' c'est-à-dire le
bagage est suspect donc il doit se passer une deuxième fois dans la
machine à rayon-X `MRX' en tournant le moteur M2 de L'MRX dans le sens
inverse après le deuxième scannage si l'MRX détecte pour
la deuxième fois un interdit le policier doit appuyer sur le bouton BSC
`bouton stop convoyeur' dans ce cas le bagage est transporté vers le
convoyeur à bande transporteur ou il sera bloqué un certain temp
au niveau du capteur cp4 afin d'être enlevé par un agent de
manutention , dans l'autre cas si le policier n'appuie pas sur le bouton BSC
(bouton stop convoyeur) le bagage est amené vers le convoyeur à
bande transporteur est reste un certain temp bloqué au niveau du capteur
cp4 pour éviter son collision lorsqu'il est transporté vers le
carrousel). Après s'il existe un bagage au niveau du capteur cp2 il sera
transporter vers l'MRX qui vient d'être libre en tournant les deux
moteurs M2 de l'MRX et M1 du convoyeur à bande transporteur,
après le bagage qui existe au niveau du capteur CP1 est transporter au
niveau du capteur CP2 situé tous les deux au niveau du convoyeur
à bande d'injection et ainsi de suite jusqu'à l'arrivé de
la condition d'arrêt qui est le suivant « il n y a pas de bagage ni
au niveau du capteur CP5, ni au niveau du capteur CP4, ni au niveau du capteur
CP3,ni au niveau du capteur CP2, ni au niveau du capteur CP1 avec passage du
7minute et 48 seconde » .
Le cycle d'arrêt est comme suit :
1- Arrêter le convoyeur à bande d'injection en
stoppant le moteur M1.
2- Arrêter la machine à rayon-X en stoppant le
moteur M2.
3- Arrêter le convoyeur à bande transporteur en
stoppant le moteur M3.
4- Arrêter le carrousel en stoppant le moteur M4.
5- Sirène d'alarme et gyrophare pendant 3 seconde.
6- Fermer les deux volets en tournant les deux moteurs M5 et M6
dans le sens de fermeture. II.2.2.1 Avantage du nouveau système
et importance de résolution du problème
Le nouveau système de traitement de bagages qui est
automatisé possède beaucoup d'avantages, les principaux avantages
sont présentés par la graphique suivante.
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage

Gain de temps et de personnel
Démarrage de tout
le système par un
seul
bouton
Arrivé de bagages
plus rapide au
passagers
rendre
moins pénibles les tâches répétitives
et opérationnelles.
Système de
traitement de
bagage
automatisé
Facilement gérez
les
équipements
décentralisées
III. Etude électrique du nouveau
système
III.1 Les machines électriques
Notre nouveau système sera constitué de deux
principales machines électriques qui sont, les
moteurs asynchrones triphasés et les capteurs de
présence dite les photocellules. III.1.1 Les moteurs asynchrones
triphasées

Figure 10:Machine asynchrone triphasé
Le nouveau système de traitement de bagages
automatisé sera constitué de six moteurs asynchrones
triphasés qui seront consacrées aux équipements de la
manière suivante. Un moteur pour le convoyeur d'injection, un autre
opérant dans deux sens pour la machine à rayon-X, un
2018/2019 20 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
autre pour le convoyeur transporteur, un moteur
dédié au carrousel et deux moteurs pour les deux volets
permettant leurs ouvertures et leurs fermetures.
III.1.1.1 présentation des moteurs asynchrone
triphasée
Le moteur asynchrone triphasé est largement utilisé
dans l'industrie, sa simplicité de
construction en fait un matériel très fiable et
qui demande peu d'entretien. Il est constitué d'une partie fixe, le
stator qui comporte le bobinage, le rotor qui est bobiné en cage
d'écureuil. Les circuits magnétiques du rotor et du stator sont
constitués d'un empilage de fines tôles métalliques pour
éviter la circulation du courant.

Figure 11:Moteur asynchrone à cage
d'écureuil
Le rotor ne peut pas tourner à la même vitesse
que le champ magnétique crée par les trois enrôlements
statoriques, sinon la cage ne serait plus balayée par le champ tournant
et il y'aurait disparition des courants induits et donc des forces de Laplace
et du couple moteur. Les deux fréquences de rotation ne peuvent donc pas
être synchrones d'où le nom moteur asynchrone.
· Le moteur est relié au réseau par
un certain nombre de dispositifs de sécurité et de commande
:
2018/2019 21 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage

Figure 12:raccordement d'une machine asynchrone au
réseau triphasé
-Le sectionneur d'isolement avec fusibles permet de
déconnecter le moteur du réseau pour les opérations de
maintenances par exemple. Il protège également le dispositif en
aval contre les risques de court-circuit grâce aux fusibles.
-Le contacteur permet d'alimenter le moteur avec une commande
manuelle ou automatique avec un automate programmable.
-Le relais thermique protège le moteur contre les
surcharges de courant, l'intensité maximale admissible est
réglable. Son action différentielle permet de détecter une
différence de courants entre les phases en cas de coupure d'une liaison
par exemple.
-Le transformateur abaisse la tension secteur à une
valeur de 24V pour garantir la sécurité des utilisateurs sur la
partie commande.
2018/2019 22 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage

Figure 13:dispositif en connexe avec la machine asynchrone
III.1.1.2 Le variateur du fréquence (variateur du
vitesse)

Figure 14:Variateur de vitesse et machine asynchrone
III.1.1.2.1 Principe de la variation de vitesse
La vitesse de synchronisme d'un moteur asynchrone
triphasé est fonction de la fréquence (alimentation) et du nombre
de paires de pôles : NS = f /p Pour un moteur tétrapolaire
à 50 Hz : NS = 50 / 2 = 25 tr/s soit 1500 tr/mn Le moteur aura une
vitesse de rotation inférieure à NS . Pour exprimer
l'écart entre vitesse de synchronisme et vitesse rotor, on
définit le glissement : g = (NS - N) / NS g est voisin de 5% Pour varier
la vitesse du moteur asynchrone, on pourra faire varier la fréquence des
courants d'alimentation.
III.1.1.2.2 Principe de la variation de
fréquence
Pour faire varier la fréquence et la valeur efficace
entre phases de la tension, on utilise la procédure suivante:
2018/2019 23 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage

Figure 15:Principe de la variation de
fréquence
L'onduleur découpe la tension continue
intermédiaire suivant le principe MLI (Modulation de Largeur
d'Impulsions) de façon que le courant moteur soit quasi
sinusoïdal.

Figure 16:Courant et tension en sortie du variateur
Cette technique assure une rotation des moteurs
régulières et sans à-coups, même à basse
vitesse. Avec les variateurs de dernière génération, on
peut fonctionner dans des gammes de fréquence (si le moteur et la charge
le permettent...) de 0,1Hz à 500Hz.
III.1.1.2.3 Choix d'un variateur
On choisit la gamme de variateurs suivant les
fonctionnalités recherchées, par exemple l'ALTIVAR ATV61
permettra de fonctionner dans les 4 quadrants, avec des fonctions de dialogue
évoluées et une protection thermique intégrée.
2018/2019 24 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
Le choix du variateur se fait principalement en fonction de la
tension réseau et de la puissance (utile) du moteur.

III.1.1.2.4 Mise en oeuvre d'un variateur

Figure 17:Mise en oeuvre d'un variateur
III.1.1.3 Les motoréducteurs
2018/2019 25 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage

Figure 18:Motoréducteur brancher au machine
asynchrone III.1.1.3.1 Fonctionnement et description
Ns<Ne (tr/min)

Ne (tr/min)

Pertes (par effet joule...)

Fp :réduire la vitesse de rotation du
moteur
Motoréducteur
III.1.1.3.2 Explication et calcul
R(ration) = Ns/Ne = Z menantes/ Z menées avec Z : nombre
des dents
Exemple :

Figure 19:Roue motrice et roue menée d'un
motoréducteur
2018/2019 26 Zarai Rayen
2018/2019 27 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
Supposons qu'on a Z1=30 et Z2=10 et Ne=3000 tr/min , Ns= ?
Et supposons que la roue motrice est 2 c'est dire qu'elle est
branchée à l'arbre du moteur tandis
que l'arbre du réducteur est branché à la
roue menée 1.
En appliquant le rapport de transmission en aura
Ns/Ne = Z2/Z1
Donc : Ns = 1000 tr/min
III.1.1.4 Avantage du variateur de vitesse par rapport aux
motoréducteurs
Le variateur convertisseur de
fréquence
· Avantages
-Vitesse variable
-Accélération et ralentissement
réglables
-Inversion de sens très aisée
-A-coups mécaniques maîtrisés
(longévité mécanique) -Surintensité de
démarrage contrôlée
-Protections moteurs programmables
-Gestion du freinage : récupération
d'énergie possible -Retour d'information (intensité,
vitesse...)
-Possibilité de dépasser la vitesse nominale (f
> 50 Hz) -Compensation du glissement (asynchrone)
-Economies d'énergie (process à vitesse variable)
-Maître/esclave possible (tapis entraîné par 2 moteurs)
-Variation de vitesse sans à coup, sans maintenance -Moins de pertes
dans la variation que si mécanique
· Inconvénients
-Surcoût à l'achat
-Perturbations électromagnétiques (CEM)
-Refroidissement du variateur
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage

Figure 20:Illustration des avantages du variateur par
rapport au motoréducteur III.1.2 Les capteurs de
présence (photocellule)
L'autre machine electrique indispensable est le capteur de
présence dite photocellule ,elles appartiennent à la partie
opérative de notre système leurs rôle est de capter et de
transmettre les informations à l'API . On est obligé d'avoir neuf
photocellules leurs montages et leurs types sont illustrés
ultérieurement.
III.1.2.1 Présentation des capteurs
photocellules
Les capteurs photoélectriques détectent et
mesurent des objets physiques ou des quantités en émettant un
champ ou faisceau de rayonnement électromagnétique. Un objet est
détecté en mesurant les modifications dans le signal de retour.
Il existe 3 principaux types de capteurs photoélectriques : capteur
à faisceau direct, rétroréfléchissant et à
réflexion. La fonction de base de chacun est de détecter la
présence ou l'absence d'objets, ou de mesurer la distance jusqu'à
l'objet.
Capteurs à faisceau direct
Les capteurs à faisceau direct dépendent de deux
boîtiers séparés, un pour l'émetteur et l'autre pour
le récepteur, avec l'émetteur fournissant un faisceau de
lumière continue au récepteur. Chaque fois qu'un objet passe
à travers le faisceau, le signal entre l'émetteur et le
récepteur est interrompu, ce qui force le récepteur à
envoyer un signal électrique à la sortie. Les capteurs à
faisceau direct sont adaptés à la détection longue
distance. Ils sont capables de détecter pratiquement tous les objets,
sans tenir compte de la couleur ou du déplacement angulaire.
2018/2019 28 Zarai Rayen
2018/2019 29 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage

Figure 21:Capteurs à faisceau direct
Capteurs
rétroréfléchissants
L'émetteur et le récepteur des capteurs
rétroréfléchissants sont tous deux logés dans le
même boîtier, mais requièrent un réflecteur face au
capteur. Le réflecteur renvoie le faisceau lumineux à
l'émetteur jusqu'à ce qu'un objet traverse le faisceau. Les
objets hautement réfléchissants, tels que l'aluminium,
requièrent des capteurs avec filtres polarisants. Le filtre permet au
capteur de reconnaître que la lumière réfléchie des
matériaux réfléchissants est différente de celle du
réflecteur.

Figure 22:Capteurs
rétroréfléchissants
Capteurs à réflexion
2018/2019 30 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
Les capteurs à réflexion sont plus faciles
à installer, car un seul dispositif doit être monté. Ceci
est dû au fait que l'émetteur et le récepteur sont contenus
dans un seul boîtier. Les capteurs à réflexion utilisent la
réflexion de l'objet cible dans une plage de détection
prédéterminée. L'émetteur envoie un faisceau de
lumière continue. Une fois que ce faisceau atteint la cible, la
lumière est diffusée dans toutes les directions. Une partie de
cette lumière est réfléchie et reconnue par le
récepteur. Le récepteur envoie alors un signal électrique
à la sortie.

Figure 23:Capteurs à réflexion
III.1.2.2 Choix des types des capteurs photocellule
Les distances de détection des objets des trois types
de capteurs photocellules sont
différentes, aussi la manière de mise en oeuvre
de chacune sont différents. Le tableau suivant illustre les avantages et
les inconvénients de chaque type.
Type de photocellule
|
Avantages
|
Inconvénients
|
Capteurs à faisceau direct
|
-Distance de détection de 20m.
|
-Emetteur et récepteur sont placés dans deux
boîtiers séparés.
|
Capteurs rétroréfléchissants
|
-l'émetteur et le récepteur sont dans un
même boîtier (un seul câble d'alimentation).
|
-Coup élevé
- Distance de détection faible par rapport au Capteurs
à faisceau direct (8m). -nécessitant un réflecteur.
|
Capteurs à réflexion
|
-l'émetteur et le récepteur sont dans un
même boîtier (un seul câble d'alimentation). - le
réflecteur n'est plus nécessaire.
-plus facile à installer
|
- la distance de détection de ce système est
faible (jusqu'à 2 m) De plus elle varie avec la couleur de l'objet
à « voir » (pour un réglage donné, la distance
de détection est plus grande pour un objet blanc
|
|
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
|
|
que pour un objet gris ou
|
|
|
noir).
|
|
Tableau 1:Avantages et inconvénients des
différents types de photocellule
Selon notre cas, la description des différents types de
photocellule et le tableau précédent, on conclue qu'on doit
utiliser neuf capteurs rétroréfléchissants qui sont trop
facile à mettre en oeuvre.
IV. Etude automatique du nouveau système IV.1
Tableau d'inventaire
Nom d'élément
|
Description
|
Vitesse
désirée
en
Tr/min
|
Intensité
|
Puissance
|
Nombre
de paires
de pôles
|
Tension
|
Nombre
E/S
|
Type
|
Moteur asynchrone Triphasé
|
Une machine asynchrone M1 pour le convoyeur à bande
d'injection opérant dans un seul sens donc comportant un seul contacteur
KM1
|
24
|
1.04A
|
0.55kw
|
4
|
380v AC
|
1 sortie
|
TOR
|
Moteur asynchrone Triphasé
|
Une machine asynchrone M2 pour la machine à rayon-X
opérant dans deux sens donc comportant deux contacteurs KM21 et KM22
|
24
|
0.7A
|
0.37kw
|
4
|
380v AC
|
2
sorties
|
TOR
|
Moteur asynchrone Triphasé
|
Une machine asynchrone M3 pour le convoyeur à bande
transporteur opérant dans un seul sens donc comportant un seul
contacteur KM3
|
24
|
1.04A
|
0.55kw
|
4
|
380v AC
|
1 sortie
|
TOR
|
Moteur asynchrone Triphasé
|
Une machine asynchrone M4 pour le carrousel opérant dans
un seul sens donc comportant un seul contacteur KM4
|
50
|
4.17A
|
2.2kw
|
4
|
380v AC
|
1sortie
|
TOR
|
Deux moteurs asynchrones triphasés
|
Deux machines asynchrones M5 et M6 pour les deux volets,
montés en parallèle et opérant dans les deux sens donc
comportant deux contacteurs KM51 et KM52
|
|
0.94A
|
0.5kw
|
4
|
380v AC
|
2 Sortie
|
TOR
|
Une sirène d'alarme et un gyrophare
|
Une sirène d'alarme et un gyrophare
(abrévié SEG) s'allume au début de cycle
|
-
|
0.41A
|
10w
|
-
|
24v DC
|
1 Sortie
|
TOR
|
|
2018/2019 31 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
|
pendant 3s et s'allume en fin de cycle pendant 3s aussi.
|
|
|
|
|
|
|
|
Un
gyrophare
|
Un voyant GBS (gyrophare bagage suspect) s'allume lorsque le
bagage qui contient l'interdit est au niveau du capteur cp4 en attendant
d'être enlevé par un agent.
|
-
|
0.41A
|
10w
|
-
|
24v DC
|
1 Sortie
|
TOR
|
Capteur photocellule
|
Un capteur photocellule CP1 au niveau du convoyeur à
bande d'injection
|
-
|
0.1A
|
2.4w
|
-
|
24v DC
|
1 entrée
|
TOR
|
Capteur photocellule
|
Un capteur photocellule CP2 au niveau du convoyeur à
bande d'injection
|
-
|
0.1A
|
2.4w
|
-
|
24v DC
|
1 entrée
|
TOR
|
Capteur photocellule
|
Un capteur photocellule CP3 au niveau de la machine à
rayon-X
|
-
|
0.1A
|
2.4w
|
-
|
24v DC
|
1 entrée
|
TOR
|
Capteur photocellule
|
Un capteur photocellule CP4 au niveau du convoyeur à
bande transporteur
|
-
|
0.1A
|
2.4w
|
-
|
24v DC
|
1 entrée
|
TOR
|
Capteur photocellule
|
Un capteur photocellule CP5 au niveau du carrousel
|
-
|
0.1A
|
2.4w
|
-
|
24v DC
|
1 entrée
|
TOR
|
Capteur photocellule
|
Un capteur photocellule CPB1 qui détecte que le premier
volet est au niveau bas
|
-
|
0.1A
|
2.4w
|
-
|
24v DC
|
1 entrée
|
TOR
|
Capteur photocellule
|
Un capteur photocellule
CPH1 qui détecte que le premier volet est au niveau
haut
|
-
|
0.1A
|
2.4w
|
-
|
24v DC
|
1 entrée
|
TOR
|
Capteur photocellule
|
Un capteur photocellule CPB2 qui détecte que le
deuxième volet est au niveau bas
|
-
|
0.1A
|
2.4w
|
-
|
24v DC
|
1 entrée
|
TOR
|
Capteur photocellule
|
Un capteur photocellule
CPH2 qui détecte que le deuxième volet est au
niveau haut
|
-
|
0.1A
|
2.4w
|
-
|
24v DC
|
1 entrée
|
TOR
|
Nombre d'entrées (Tor) totale
|
9
|
|
|
2018/2019 32 Zarai Rayen
2018/2019 33 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
Nombre de sorties (Tor) totale
|
9
|
|
Tableau 2:Tableau d'inventaire
IV.2 L'automate programmable industriel
IV.2.1 Présentation de l'automate programmable
industriel
L'automate programmable industriel est une machine
électronique programmable par un personnel non informaticien et
destiné à piloter en ambiance industrielle et en temps
réel des procédés industriels , elle est la base de notre
système automatisé, elle est le cerveau de notre système
et elle constitue la partie commande du système son rôle est de
traiter les informations (les données d'entrés) reçu des
capteurs et à travers un programme informatique stocké dans sa
mémoire elle envoie les ordres vers les préactionneurs, il y a
beaucoup de constructeur d'API comme les sociétés Siemens,
Schneider, Omron, allen bradelly...Mais, la structure externe et interne des
API est la meme et elle est présentée dans les deux figures
suivantes.
IV.2.2 Structure et composant des automates programmables
industriels
Structure externe des API
La figure suivante présente la structure externe des
API. Tous les API ont presque cette meme aspect .
2018/2019 34 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage

Figure 24:Aspect extérieur d'un automate S7-200
CPU222
Structure interne des API
Les API comportent quatre principales parties :
Une unité de traitement (un processeur CPU);
Une mémoire ;
Des modules d'entrées-sorties ;
Des interfaces d'entrées-sorties ;
Une alimentation 230 V, 50/60 Hz (AC) - 24 V (DC).
La structure interne d'un automate programmable industriel
(API) est assez voisine de
celle d'un système informatique simple, L'unité
centrale est le regroupement du processeur et de
la mémoire centrale. Elle commande l'interprétation
et l'exécution des instructions programme.
Les instructions sont effectuées les unes après
les autres, séquencées par une horloge.
Deux types de mémoire cohabitent :
- La mémoire Programme où est stocké le
langage de programmation. Elle est en général figée,
c'est à dire en lecture seulement. (ROM : mémoire
morte)
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
- La mémoire de données utilisable en
lecture-écriture pendant le fonctionnement c'est la RAM (mémoire
vive). Elle fait partie du système entrées-sorties. Elle fige les
valeurs (0 ou 1) présentes sur les lignes d'entrées, à
chaque prise en compte cyclique de celle-ci, elle mémorise les valeurs
calculées à placer sur les sorties.

Figure 25:Structure interne d'un automates programmables
industriels
IV.2.3 Choix de l'automate programmable industriel
Selon le cahier des charges on est obligé de choisir
l'une des deux marques d'API soit
Siemens ou Schneider, On ne peut pas faire de comparaison
directement vu que ce sont deux marques d'automates bien différentes.
Chacune a ses propres atouts. Mais aussi le logiciel de programmation de l'api
cité dans le cahier des charges est tia portal, ce qui justifie la
tendance de l'équipe de l'OACA vers les APIs siemens. En outre, parmi
les avantages de cette marque on peut citer que La marque de l'api la plus
utilisé et la plus populaire dans notre pays est siemens, aussi l'api
siemens est facile à maitriser encore certains automates comme celle de
la marque
2018/2019 35 Zarai Rayen
2018/2019 36 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
Siemens ont des logiciels de programmation plus aboutis
comparés à d'autres. Cela permet un gain de temps énorme
lors des développements.
En plus, La disponibilité en termes de SAV et de
composants de rechange, certaines marques d'automates comme Siemens ont plus
d'autorité ce qui leur permet d'offrir des services après ventes
et d'accompagnement clients meilleurs. Autre, certaines marques d'automates
comme Siemens sont plus connues que d'autres ce qui témoigne de leur
qualité de service. Après avoir choisir la marque Siemens on a un
autre critère à prendre en compte, c'est le critère du
coup, pour de petit projet d'automatisation, il est préférable de
choisir des micro ou mini automates ce qui va nous empêcher "d'acheter un
char pour tuer une moustique". En résumé, A part le
critère de prix qui fait partie des critères les plus
considérés lors du choix d'un automate, le choix définitif
dépendra du cahier des charges et des spécificités
techniques du projet. La plupart des fabricants d'automates proposent plusieurs
gammes d'automates allant du micro, mini jusqu'au méga ce qui permet de
couvrir une diversité de projets.
On doit tenir compte de plusieurs critères
:
-Nombres d'entrées/sorties intégrés.
- Temps de traitement (scrutation).
-Capacité de la mémoire.
-Le nombre et la nature des fonctions d'automatisme comme
(Nombre de compteurs, nombre de
temporisateurs...)
Finalement le choix tombe sur la gamme s7-1500 et plus
précisément sur la cpu 1511c-1 PN qui
satisfait nos besoins et dont la description est la
suivante :
CPU avec écran ;
mémoire de travail 175 Ko code et 1 Mo données
;
temps d'opération sur bits 60 ns ;
concept de sécurité à 4 niveaux, fonctions
technologiques intégrées : Motion Control,
Régulation, Comptage et Mesure ;
traçage ;
contrôleur PROFINET IO, prise en charge de RT/IRT,
Performance Upgrade PROFINET V2.3,
2 ports, périphérique I, MRP, MRPD, protocole de
transport TCP/IP, secure Open User
2018/2019 37 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
Communication, communication S7, serveur Web, client DNS, OPC
UA Server Data Access,
mode synchrone, routage ;
options Runtime, firmware V2.5 avec DI16/DQ16, AI5/AQ2 module
d'entrées TOR DI
16xD4V, par groupes de 16 ;
module de sorties TOR DQ 16xD4V/0,5A, par groupes de 16 ;
module d'entrées analogiques AI 4xU/I, AI 1xRTD, 16
bits, par groupes de 5 ; module de sorties
analogiques AQ 2xU/I, 16 bits, par groupes de 2 ;
6 voies de comptage et de mesure avec codeurs
incrémentaux 24V (jusqu'à 100kHz) ;
4 voies pour PTO, modulation de largeur d'impulsion, sortie
de fréquence (jusqu'à 100kHz)

Figure 26:CPU 1511c-1 PN
IV.3 Programmation
Après avoir câbler et installer les
différents équipements selon l'armoire électrique
conçu
et les schémas électriques présenter dans
l'annexe, il reste qu'à programmer et charger le programme dans
l'API.
IV.3.1 Choix du langage de programmation
Il existe différents langages de programmation
définis par la CEI 61131-3 :
IL (Instruction List), le langage List est
très proche du langage assembleur on travaille au plus près du
processeur en utilisant l'unité arithmétique et logique, ses
registres et ses accumulateurs. ST (Structured Text), Ce
langage structuré ressemble aux langages de haut niveau utilisés
pour les ordinateurs.
2018/2019 38 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
LD (Ladder Diagram), le langage Ladder
(échelle en anglais) ressemble aux schémas électriques et
permet de transformer rapidement une ancienne application faite de relais
électromécaniques en un programme. Cette façon de
programmer exploite une approche visuelle du problème longtemps
appréciée en industrie, mais qui s'appuie sur une logique de
moins en moins adaptée mais toujours utilisée (2013). On parle
également de langage à contacts ou de schéma à
contacts pour désigner ce langage Ladder.
Boîtes fonctionnelles (FBD), le FBD se
présente sous forme diagramme : suite de blocs, connectables entre eux,
réalisant des opérations, simples ou très
sophistiquées.
Dans la programmation d'un automate, il est possible
également de choisir de programmer en SFC, dérivé du
grafcet. À chaque action élémentaire est associé un
programme écrit en IL, ST, LD ou FBD.
Puisque j'ai des connaissances sur les deux langage LD et
SFC, j'ai décidé de les utiliser pour programmer l'API.
IV.3.2 Logiciel de programmation
Le logiciel de programmation cité dans le cahier des
charges et utilisé est tia portal précisément sa
dernière version numéro 15.
IV.3.2.1 Présentations de tia portal
Le TIA PORTAL est la clé ouvrant l'accès au
potentiel intégral de la Totally Integrated Automation. Le logiciel
optimise l'ensemble des procédures au niveau planification, machine et
processus. Son interface utilisateur intuitive, ses fonctions simples et sa
transparence totale des données le rendent extrêmement
convivial.
Le TIA PORTAL de Siemens représente la nouvelle
génération des logiciels d'automatisation industrielle. Les
premiers logiciels d'automatisation se satisfaisant d'un seul environnement, un
seul projet logiciel pour toutes les taches d'automatisation.
Le logiciel met à disposition les applications
suivantes :
- Le gestionnaire de projet
- La configuration des appareils
- L'éditeur de mnémoniques
- L'éditeur de programmes avec plusieurs langages de
programmation (CONT, LIST, S7-GRAPH, SCL)
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage

Figure 27:Vue générale de tia portal
IV.3.2.2 Avantage de tia portal par rapport au step7
SIMATIC STEP7 est depuis de nombreuses années le
standard de fait et le premier système de programmation d'automates.
SIMATIC STEP7 permet de configurer, de programmer, de tester et de
diagnostiquer des automates modulaires et des automates basés sur PC
SIMATIC. Ce standard est désormais intégré dans un
environnement de développement d'automatisation TIA PORTAL pour assurer
les avantages suivants :
· Utilisation d'un seul environnement pour tous les
besoins d'automatisation, avec prise en charge aisée de tous les
automates SIMATIC.
· Gain de temps grâce à des éditeurs
intelligents et extrêmement performants accélérant la
programmation des automates.
· Accroissement de la qualité des produits par
l'enregistrement des composants d'automatisation modulaire
éprouvé dans une bibliothèque et la possibilité de
les réutiliser dans des projets futurs.
· Protection des ressources de valeurs par
l'intégration parfaite des exigences de sécurité des
machines.
2018/2019 39 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
· Possibilité de configurer, de programmer et de
tester les nouveaux automates SIMATIC S7-1200 et S7-1500.
· L'intégration de SIMATIC WINCC dans TIA PORTAL
apporte une réduction de temps de développement de l'interface
homme machine.
IV.3.3 Tableau des variables de l'API

2018/2019 40 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage


2018/2019 41 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
Ø

IV.3.4 Grafcet
Remarque : vue que la grafcet n'est pas claire elle est mise dans
le CD sous format PNG.
2018/2019 42 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
IV.3.5 Tableau des conditions d'activation et
désactivation des étapes
0 Init X1.Init
1 X0.D_ cyc .Init X2+Init
2 X1.cph1.cph2.Init X3+Init
3 X2.X2/t/3s.Init X4+Init
|
4 [X3+(X7.cp4.cp3)+(X10.cp4.cp3)+(X12.cp4)
|
X5+X13+X27 +Init
|
|
(X26.cp2)+(X25. cp1)+(X32.cpb1.cpb2)].Init
|
5 X4.cp1.cp2.cp3.cp4.Init X6+Init
6 X5.cp3.Init X7+X8+Init
7 X6.BMA.X6/t/7s.Init X4+Init
8 X6.BMA.Init X9+Init
9 X8.cp3.Init X10
+X11+Init
10 X9.BSC.X9/t/7s .Init X4+Init
11 X9.BSC.Init X12+Init
12 X11.cp4.cp3.Init X4+Init
13 X4.cp5/t/4.8s.(cp4+cp3+cp2).Init X15+X14+
Init
14 X13.cp4 .Init X15+Init
15 (X13.cp4)+(X14.cp4).Init X16+X23+
Init
16 X15.cp3.Init X17+X18+Init
17 X16.BMA.X16/t/7s.Init X23+Init
18 X16.BMA.Init X19+Init
19 X18.cp3.Init X20+X21+Init
20 X19.BSC.X19/t/7s.Init X23+Init
2018/2019 43 Zarai Rayen
|
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
|
|
|
|
|
21
|
|
X22+Init
|
|
X19.BSC.Init
|
|
22
|
|
X23+Init
|
|
X21.cp4.cp3.Init
|
|
23
|
[(X17.cp4.cp3)+(X20.cp4.cp3)+(X22.cp4)+(X15.cp3
|
X24+X25+Init
|
|
)].Init
|
|
24
|
|
X25+Init
|
|
X23.cp2.Init
|
|
25
|
X26+X4+Init
|
|
[(X24.cp3.cp2)+(X23.cp2)].Init
|
|
26
|
X4+Init
|
|
X25.cp1.Init
|
|
27
|
X28+Init
|
|
X4.cp4.cp2.cp3.(cp5.cp1/t/468s).Init
|
|
28
|
X29+Init
|
|
X27.Init
|
|
29
|
X30+Init
|
|
X28.Init
|
|
30
|
X29.Init
|
X31+Init
|
|
31
|
|
X32+Init
|
|
X30.Init
|
|
32
|
|
X4+Init
|
|
X31/t/3s.Init
|
Tableau 3:Tableau des conditions d'activation et
désactivation des étapes
IV.3.6 Ladder
IV.3.6.1 Ladder des étapes
Un abstract des ladders des étapes est présent dans
l'annexe .
IV.3.6.2 Ladder des actions associés aux
étapes
Un abstract des ladders des actions associés aux
étapes est présent dans l'annexe .
V. Conception électrique
V.1 Logiciel utilisé
Le logiciel AutoCAD Electrical, composant de la solution de
Digital Prototyping, intègre
toutes les fonctionnalités du fameux logiciel AutoCAD,
ainsi qu'un jeu complet de fonctionnalités de CAO pour la conception
électrique.
Le logiciel d'ingénierie AutoCAD Electrical comprend
toutes les fonctionnalités d'AutoCAD, ainsi que des
fonctionnalités d'ingénierie électrique telles que les
bibliothèques de symboles, la génération de rapports de
nomenclature et la conception E/S API qui accélèrent et
renforcent l'efficacité de la conception de commandes.
2018/2019 44 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
V.2 Schéma électrique complet
V.2.1 Les schémas électriques du circuit de
puissance
Les schémas électriques du circuit de puissance
sont présents dans l'annexe .
V.2.2 Les schémas électriques du circuit de
commande
Les schémas électriques du circuit de puissance
sont présents dans l'annexe .
V.2.3 Nomenclature
|
Désignation
|
Symbole
|
Commentaire
|
|
Voyant signalant la marche du moteur M1
|
V1
|
Marche M1
|
|
Voyant signalant la marche avant du moteur M2
|
V2
|
Marche avant M2
|
|
Voyant signalant la marche arrière du moteur M2
|
V2
|
Marche arrière M2
|
|
Voyant signalant la marche du moteur M3
|
V3
|
Marche M3
|
|
Voyant signalant la marche du moteur M4
|
V4
|
Marche M4
|
|
Voyant signalant la marche du moteur M5
|
V5
|
Marche avant M5
|
|
Voyant signalant la marche du moteur M6
|
V5
|
Marche arrière M5
|
|
Voyant signalant le défaut du moteur M1
|
R1
|
Défaut M1
|
|
Voyant signalant le défaut du moteur M2
|
R2
|
Défaut M2
|
|
Voyant signalant le défaut du moteur M3
|
R3
|
Défaut M3
|
|
Voyant signalant le défaut du moteur M4
|
R4
|
Défaut M4
|
|
Voyant signalant le défaut du moteur M5
|
R5
|
Défaut M5
|
|
Voyant signalant le défaut du moteur M6
|
R5
|
Défaut M6
|
|
Voyant signalant la présence de tension 24 V cc
|
V
|
Tension DC=24v de commande
|
|
Bouton d'arrêt d'urgence
|
AU
|
Bouton d'arrêt d'urgence pour chaque machine
|
|
Commutateur de sélection de mode
|
C
|
Automatique -arrêt- semi-automatique
|
|
Contacteur du moteur M1
|
KM1
|
|
|
Contacteur du moteur M2 marche avant
|
KM21
|
|
|
Contacteur du moteur M2 marche arrière
|
KM22
|
|
|
Contacteur du moteur M3
|
KM3
|
|
|
Contacteur du moteur M4
|
KM4
|
|
|
Contacteur des deux moteurs M5 et M6 ouverture
|
KM51
|
|
|
Contacteur des deux moteurs M5 et M6 fermeture
|
KM52
|
|
|
Relais auxiliaire
|
RAU
|
Pour l'arrêt d'urgence
|
|
Relais auxiliaire
|
CYRB
|
Pour la réception de bagage
|
|
Relais auxiliaire
|
AD
|
Accord de démarrage
|
|
Gyrophare
|
SEG
|
Ouverture des volets ou arrêt carrousel
|
|
Temporisateur KM4
|
La2-D22
|
Temporisateur au repos
|
|
Temporisateur KM51
|
La2-D22
|
Temporisateur au repos
|
|
Transformateur
|
T
|
Transformateur de tension 380 v AC-110 v AC
|
|
Redresseur
|
R
|
Redresseur de tension 110 v AC - 24 v DC
|
|
Variateur de fréquence
|
VRF
|
|
Tableau 4:Nomenclature des composants des schémas
électriques
2018/2019 45 Zarai Rayen
2018/2019 46 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
VI. Conception d'une armoire
électrique
VI.1 méthodologie de conception d'une armoire
électrique Jean-François Sarcia, du département Grands
projets de Balas (93)
« Lors du dimensionnement de l'armoire, il faut aussi
songer au raccordement des câbles »
« Lorsqu'on conçoit une armoire électrique
de distribution d'énergie, il faut penser à la place
laissée pour le raccordement des câbles dans l'armoire, surtout
lorsqu'il s'agit de câbles de forte section. Comment sur le chantier
allons-nous introduire les câbles ? Par le haut, par le bas,
latéralement ? Dans l'enveloppe elle-même, y a-t-il assez de place
pour effectuer les raccordements dans de bonnes conditions ? Plus nos logiciels
de conception deviennent puissants et faciles à utiliser, plus le
concepteur doit penser à des considérations de base de ce genre.
»
VI.2 Logiciel utilisé (Autocad electrical)
Le logiciel de CAO Autocad electrical nous permet de faire des
simples dessins avec les
fameux outils(cercle ,rectangle, ligne ...) .C'est à
travers desquels que j'ai dessiné la structure des deux armoires
électriques en illustrant leurs dimensions et la places des
différents
composants qu'elles contiennent.
VI.3 La compatibilité
électromagnétique Séparation des courants forts et
faibles
Dans la mesure où les armoires électriques
reçoivent un contenu de plus en plus hétérogène :
courants forts, courants faibles, comptages, automates, parfois variateurs de
tension et variateurs de fréquence pour le pilotage de certains
équipements courants, la Compatibilité
électromagnétique (CEM) et la séparation entre courants
forts et courants faibles deviennent des impératifs forts.
Les perturbations électromagnétiques sont des
sources potentielles de dysfonctionnement pour tous les matériels
électroniques contenus dans les armoires, qu'ils traitent des signaux
analogiques (compteurs, régulateurs), ou des signaux numériques
(automates, interfaces de communication). Ces perturbations sont fugitives et
apparaissent dans des conditions particulières de fonctionnement des
équipements, difficiles à identifier. Le meilleur moyen de s'en
protéger consiste à respecter les règles de conception et
de mise en oeuvre des armoires et de leurs équipements.
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
La Directive européenne CEM2004/108/CE est
entrée en vigueur le 20 janvier 2005, étendant l'obligation de
conformité aux exigences de CEM (Compatibilité
électromagnétique), aux installations fixes, dont les armoires
électriques. Les ensembles d'appareillages et d'automatismes « en
enveloppe » - dans des armoires électriques - sont
concernés. La compatibilité électromagnétique d'une
armoire et du ou des tableaux qu'elle contient représente leur
capacité à fonctionner dans un environnement perturbé,
tout en limitant leurs propres émissions perturbatrices. Deux
caractéristiques sont à traiter :
l'équipotentialité et l'efficacité de blindage.
· L'équipotentialité, à ne pas
confondre avec le raccordement à la terre pour la protection des
personnes, consiste en la création d'une référence de
potentiel commune à tous les éléments de l'armoire
électrique. La conception des armoires électriques
métalliques facilite la réalisation de cet objectif :
- l'utilisation de la structure métallique crée
une référence de potentiel fiable ;
- les systèmes de montage des équipements
doivent assurer une bonne continuité avec cette référence
de potentiel. Ainsi, l'emploi de plaques et châssis de montage
galvanisés assure un contact direct avec les équipements
possédant un châssis métallique conducteur.
Par perçage du revêtement, les vis et
écrous doivent assurer un bon contact sur les surfaces peintes ou
traitées.
· Le blindage des armoires. À proximité de
sources de rayonnement électromagnétiques de fortes puissances -
fours, variateurs de fréquence, ventilateurs, etc. - certains appareils
peuvent mal fonctionner de manière erratique. La protection de ces
appareils par l'emploi d'une armoire blindée ne doit être
envisagée qu'après avoir tenté de résoudre les
difficultés de manière traditionnelle : séparation des
sources, respect des distances d'éloignement minimales, etc.
VI.4 Les schémas des deux armoires
électriques (puissance et commande)
2018/2019 47 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
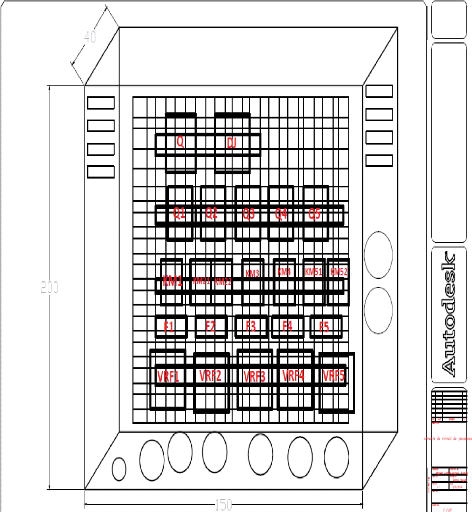
2018/2019 48 Zarai Rayen
Figure 28:Armoire électrique de puissance
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage

Figure 29:Porte de l'armoire électrique de
puissance
2018/2019 49 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage

Figure 30:Armoire électrique de commande
2018/2019 50 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage

2018/2019 51 Zarai Rayen
Figure 32:Porte de l'armoire électrique de
commande
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
VII. Conclusion
Dans ce deuxième chapitre j'ai réalisé le
troisième objectif qui est l'étude du coté
électrique ainsi la coté automatique du
système et j'ai réalisé le programme permettant de
commander le processus du traitement de bagages en outre nous avons
abordé la conception électrique en élaborant les
différents schémas électriques de notre nouveau
système, ainsi on a
conçu son armoire électrique.
2018/2019 52 Zarai Rayen
|
Chapitre 3 :
Résultats et
Commentaires
|
2018/2019 54 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
I. Introduction
Dans ce chapitre nous allons réaliser la simulation du
fonctionnement de notre nouveau
système dans son mode automatique à l'aide du
logicielle en connexe avec le Tia portal nommé PLC SIM. C'est le lieu de
préciser mon contribution personnelle et l'apport original
éventuel de ma méthode .
II. Simulation du Nouveau système
La simulation industrielle permet de modéliser sur
ordinateur tout ou partie de la chaîne
de production industrielle et logistique d'un produit et
d'effectuer diverses modifications virtuelles qui permettront d'étudier
toutes les possibilités de scénarios . En outre il permet de
détecter les erreurs s'ils existent.
La simulation et trop simple , il suffit de visualiser
l'état des contact ou bobine ou bloc de temporisation ou bien les
liaisons dans notre cas , s'ils sont de couleurs verts donc on a la valeur
logique 1 et s'ils sont de couleur bleue cela signifie la valeur logique 0.
Aussi on change l'état de contact manuellement par la boite qui s'ouvre
lors de la simulation.

en ce qui suit la simulation de notre
système:

1-on sélectionne la cpu
2- on appuie sur l'icône simuler

3-on ouvre la table de simulation
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage

4-on ajoute les noms des contacts à activer ou
désactiver

5-les capteurs cp1,cp2,cp3,cp4 et cp5 sont initialement
à la valeur logique 1 puisqu'il n'y a pas

de bagages

6- activer la visualisation du programme par cette icone
7-on met notre cpu dans le mode marche

8-on force le bit init à 1 pour activer l'étape
0
2018/2019 55 Zarai Rayen

Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage

9-l'étape 0 est active

10-mettre le bit cp1 à 0 pour signifier que l'agent met le
premier bagage
11 - on force le bit D_cyc à 1 pour activer l'étape
1 et désactiver l'étape 0
2018/2019 56 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage

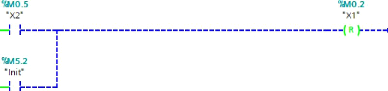
12-maintenant l'étape 1 est active et l'étape
précédente `0' est désactivé

2018/2019 57 Zarai Rayen
13- l'action lié à l'étape 1 est
actionné tant que l'étape est active donc les volets s'ouvrent
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage


14-l'étape 2 est activé pendant 3s pour la
sirène d'alarme et le gyrophare puis elle est
désactivée



2018/2019 58 Zarai Rayen
15-l'étape 3 est active puis désactivé mais
avant la désactivation il met l'action lié à elle en
mode
set
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage

16-action lié à l'étape 3 en mode set ce qui
signifie que le carrousel est en marche


17-l'étape 5 est active ce qui signifie que les deux
moteurs M1 et M2 sont en marche pour transporter le bagage de cp1 vers cp3


2018/2019 59 Zarai Rayen
18-les deux contacteurs km1 et km21 sont actionnés tant
que l'étape 5 est active
2018/2019 60 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage

19-on met le bit cp3 à 0 pour exprimer que le bagage
atteint le niveau de cp3 puis on considère que le bagage n'est pas
suspect donc on n'appuie pas sur le bouton BMA autrement on laisse le
bit BMA à 0


20-l'étape 7 est maintenant active ce qui signifie que les
deux moteur M3 et M2 sont en marchent pour amener le bagage au niveau de cp4
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage

2018/2019 61 Zarai Rayen
21- les deux moteur M3 et M2 sont en marchent pour amener le
bagage au niveau de cp4

22-on met le bit cp4 à 0 ce qui signifie que le bagage
est au niveau de ce dernier capteur et on
retourne vers l'étape 4



23-L'étape 14 est active ce qui signifie que le moteur
M3 est en marche pour transporter le
bagage de cp4 au carrousel
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage


24-l'action lié à l'étape 14 est
actionné

25-maintenant on met le bit cp4 est à 1 ce qui signifie
que le bagage est transporté au carrousel

26-on suppose que l'agent met un autre bagage sur le convoyeur
injecteur cela est traduit par cp1
à l'état 0
2018/2019 62 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage


27- maintenant l'étape 26 est active pour amener le bagage
de cp1 à cp2


2018/2019 63 Zarai Rayen
28-le contacteur KM1 est actionné

2018/2019 64 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage


29-l'étape 24 est maintenant active pour transporter le
bagage de cp2 à cp3
30-les actions liés à l'étape 24 sont
actionné (KM1 et KM21)

2018/2019 65 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage


31-on appuie sur le bouton BMA, l'étape 18 est active
32-l'action lié à l'étape 18 est
actionné ce qui met l'MRX en marche arrière jusqu'à mettre
le bit cp3 à 1 pour rescanner le bagage et on force le bit BSC à
1 pour exprimer que le bagage contient
l'interdire
33-on met le bit cp3 à 1 puis on se trouve dans
l'étape 21
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage


34-l'étape 21 est active pour amener le bagage qui
contient l'interdire jusqu'à cp4 et reste là jusqu'à
l'enlever par un agent
35-on met le bit cp4 à 0 pour signifier que le bagage est
maintenant au niveau de cp4 en attendant d'être enlevé par un
agent
2018/2019 66 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage



2018/2019 67 Zarai Rayen
36-l'étape 22 est active ce qui provoque une sirène
d'alarme et gyrophare jusqu'à l'enlèvement du bagage qui contient
l'interdit
37-on met le bit cp4 à 1 ce qui signifie que le bagage qui
contient l'interdit est enlevée en passe vers le cycle d'arrêt
après 468s précisément à l'étape 27
38-les reset des contacteurs s'effectue rapidement et on a un
gyrophare d'arrêt du système puis les deux volets se ferment
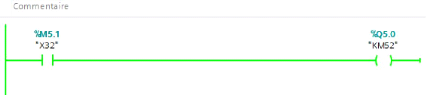
2018/2019 68 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage


39-finalement l'étape 32 est active pour fermer les deux
volets
40-l'action lié à l'étape 32 est
actionnée jusqu'à mettre les deux bit cpb1 et cpb2 à 0

41-metrre les deux bits cpb1 et cpb2 à 0 pour signifier
que les deux volets sont fermés

42-finalement en appuie sur le bouton stopper la CPU
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
III. Résultat et commentaire
D'après la simulation, le nouveau système marche
parfaitement comme j'ai espéré . La
méthode adoptée constitut une solution
suffisante et satisfaisante au problème posé et répond aux
exigences demandées dans le cahier des charges .
IV. Conclusion
Dans ce dernier chapitre j'ai simulé le fonctionnement
de notre nouveau système ce qui
nous permet de vérifier l'exactitude de la méthode
adoptée et garantir son rendement. Avec cette objective mon travail est
achevé.
2018/2019 69 Zarai Rayen
Automatisation du fonctionnement de carrousel de livraison de
bagages à l'arrivé de l'aéroport international de
Tunis-Carthage
Conclusion générale et perspectives
Au cours de ce projet de fin d'étude j'ai
découvert deux branches scientifiques trop important dans le domaine de
l'industrie qui sont l'électricité industrielle et l'automatisme.
Non pas seulement les découverts mais en plus acquérir des
expertises et de savoir-faire. Ce sont deux branches que chaque technicien de
maintenance industrielle doit les connaitre .
Le projet réalisé Recueilli entre mes
connaissances théoriques et pratiques et facilite mon insertion dans le
monde professionnel en passant 3 mois de stage dans une des plus grosses
institutions du pays.
L'objectif de ce projet est le développement d'une
application d'automatisation par vision industrielle. Ce type d'application
peut être destiné à toutes industrie appliquée au
domaine.
En rédigeant cette mémoire de fin
d'étude, on a présenté l'entreprise d'accueil et
diagnostiqué le système de traitement des bagages existant. On a
conçu un nouveau système de traitement des bagages et on a fini
par une réalisation pratique de la solution proposée.
En perspectives, beaucoup de travail reste à faire pour
améliorer la réalisation pratique du nouveau système de
traitement de bagages et mettre en place une supervision du système
automatisé.
2018/2019 76 Zarai Rayen
Bibliographie
[1]. Adel SAID et Yassine JEMAI ,Support de cours installation
industrielle
[2]. Awatif ELBANANI, Rapport AUTOMATISATION DE LA STATION DE
TRAITEMENT D'EAU
[3].
https://fr.wikipedia.org/wiki/Schéma_électrique
[4].
https://www.tecnipass.com/cours-materiels-controle-
parametrage.variateur?page=2&fbclid=IwAR247tF42b28ylMKRpaXP41Nu_e1GS2
dqFK4AjroEFicR4mCCTk9uylIt1c
[5].
www.oaca.nat.tn
[6].
http://stephane.genouel.free.fr/FT/0%20Dossier%20technique/1%20Texte
/Scenari%20capteurs/co/module_DT_8.html
[7].
http://www.technologuepro.com/cours-automate-programmable-industriel/Les-automates-programmables-industriels-API.htm
[8].
https://www.uvt.rnu.tn/resources-
uvt/cours/Automates/chap2/co/Module_chap2_14.html
[9].
https://www.uvt.rnu.tn/resources-
uvt/cours/Automates/chap2/co/Module_chap2_4.html
[10]. Solution technique ,Armoires électriques, de la
répartition électrique à l'exploitation des
réseaux.
Annexe
· Caractéristique du carrousel :
Caractéristique tambour de moteur
Diamètre = 160mm
Périmètre = 3.14 * 160 = 502.4mm
N = nombre de tour / cycle
N = distance de la bande de carrousel / période
N = 70 000/502.4
N = 139.33 ~ 139 tours / cycle
T = temp = Distance de bande carrousel / vitesse
T = D / V = 70 / 25 = 2.8 min
Tours / min = ?
139 Tours / cycle > 2.8 min
? < 1 min
N = 1 * 139 / 2.8 = 49.64 tours / min ~ 50 tours / min Nombre de
paires de pole du moteur = 4
· Caractéristique convoyeur à bande
transporteur :
Diamètre du tambour = 160 mm
Périmètre du tambour = ð * diamètre =
3.14 * 160 = 502.4 mm
N = nombre de tours par cycle
N = distance / période
N = 1500 / 502.4 = 2.98 ~ 3tours / cycle
T = Temps = D / V = 1500 / 12 000 = 0.125 min
3 tours / cycle > 0.125 min
? < 1 min
N = tours / min = 3 * 1 / 0.125 = 24 tours / min Nombre de
paires de pole est 4
· Caractéristique moteur de la machine à
rayon-X Périmètre du tambour = ð * diamètre =
3.14 * 160 = 502.4 mm N = Nombre de tours / cycle = Distance / période =
5500 / 502.4 = 10.94 tours Temps pour un cycle = distance / vitesse = 5.5 / 12
= 0.458 min
10.94 tours / cycle > 0.458 min
? < 1 min
10.94 / 0.458 = 23.886 tours / min ~ 24 tours / min
· Caractéristique moteur convoyeur à
bande d'injection Périmètre du tambour = ð *
diamètre = 3.14 * 160 = 502.4 mm N = nombre de tours par cycle =
distance / période = 2500 / 502.4 = 4.976 ~ 5 tours / cycle T = temps =
distance / vitesse = 2500 / 12000 = 0.208 min
5 tours / cycle > 0.208 min
? < 1 min
N = tours / min = 5 / 0.208 = 24 tours / min
·

Choix des relais thermiques
-Entre 4A et 6A le relais thermique est de
référence : LR1-D09310 TELEMECANIQUE/Schneider Electric (c'est le
cas du carrousel).
- Entre 1A et 1.6A le relais thermique est de
référence : LR1-D09306 TELEMECANIQUE/ Schneider Electric(c'est le
cas des deux convoyeurs).
- Entre 0.63A et 1A le relais thermique est de
référence : LR1-D09305 TELEMECANIQUE/ Schneider Electric(c'est le
cas de la machine à rayon-X).
- Entre 0.63A et 1A le relais thermique est de
référence : LR1-D09305 TELEMECANIQUE/ Schneider Electric (c'est
le cas des deux volets).
· Choix des sectionneurs portes fusible
10mm
-Le sectionneur porte fusible générale
I(convoyeur injecteur)+I(MRX)+I(convoyeur
transporteur)+I(carrousel)+I(deux volets) = 1.04 + 0.7 + 1.04 + 4.17 + 0.95 =
7.9A
38mm
Choix du fusible : 7.9 * 1.5 = 11.85 A ~ 12 A
Donc le référence du sectionneur est :
TELEMECANIQUE/ Schneider Electric LS1-D2531
+LAB-D254
-Choix du sectionneur porte fusible de moteur du convoyeur
à bande d'injection
Imax = 1.04 * 1.5 = 1.56 A
Donc le référence du sectionneur est :
TELEMECANIQUE / Schneider Electric LS1-D2531
-Choix du sectionneur porte fusible de la machine à
rayon-X
Imax = 0.7 * 1.5 = 1.05 A
Donc le référence du sectionneur est :
TELEMECANIQUE Schneider Electric LS1-D2531
-Choix du sectionneur porte fusible de moteur du convoyeur
à bande transporteur
Imax = 1.04 * 1.5 = 1.56 A
Donc le référence du sectionneur est :
TELEMECANIQUE /Schneider Electric LS1-D2531
-Choix du sectionneur porte fusible de moteur du
carrousel
Imax = 4.17 * 1.5 = 6.25 A
Donc le référence du sectionneur est :
TELEMECANIQUE /Schneider Electric LS1-D2531
-Choix du sectionneur porte fusible de moteur du
volet
Imax = (2 * 0.475) * 1.5 = 1.425 A
Donc le référence du sectionneur est :
TELEMECANIQUE /Schneider Electric LS1-D2531
· Choix des contacteurs (voire l'intensité dans
le tableau d'inventaire ci-dessus)
-carrousel :
section câble : 6mm2
Contacteur : LC1-D16 + un contact auxiliaire de réf :La1
-D22
-convoyeur d'injection :
section câble : 2.5mm2
Contacteur : LC1-D12 + un contact auxiliaire de réf :La1
-D22
-convoyeur transporteur :
section câble : 2.5mm2
Contacteur : LC1-D12 + un contact auxiliaire de réf :La1
-D22
-Machine à rayon-X :
section câble : 2.5mm2
Contacteur inverseur : L-D099 + deux contacts auxiliaires de
réf :La1 -D22
-deux volets :
section câble : 2.5mm2
Contacteur inverseur : L-D099 + deux contacts auxiliaires de
réf :La1 -D22
· Choix des contacteurs auxiliaires On a besoin de deux
auxiliaires sans bobine : -une de référence : LA1-D11 pour
CYRB
-une de référence : LA1-D22 pour QD
En outre on a besoin de trois auxiliaires avec bobine (pour
RAU,CYRB,AD):
-CA2-DN222
- CA2-DN222
- CA2-DN222
· Choix des temporisateurs
Nous avons besoin de deux blocs de contacts auxiliaires
temporisés de type au repos , de référence TELEMECANIQUE
LA3-D22
Programmation
Ladder des étapes :





Ladder des Actions liées au étapes
:
Figure 33:Entré alimentation triphasé
Les Schémas électriques de
puissance

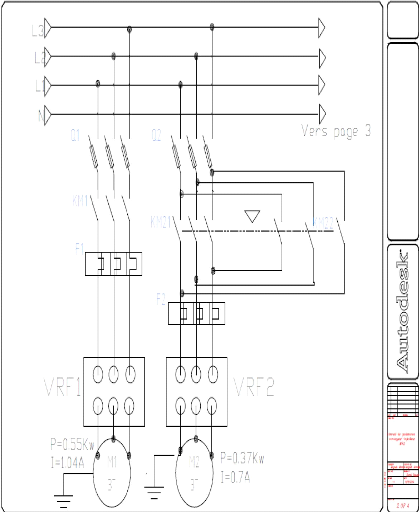
Figure 34:Moteur du convoyeur d'injection et moteur de la
machine à rayon-X
Figure 35:Moteur du convoyeur transporteur et moteur de
carrousel


Figure 36:Les moteurs des deux volets
Les schémas électriques de commande
:

Figure 37:Le stabilisateur(transformateur +
redresseur)
Figure 38:Schéma de commande numéro1


Figure 39:Schéma de commande numéro 2
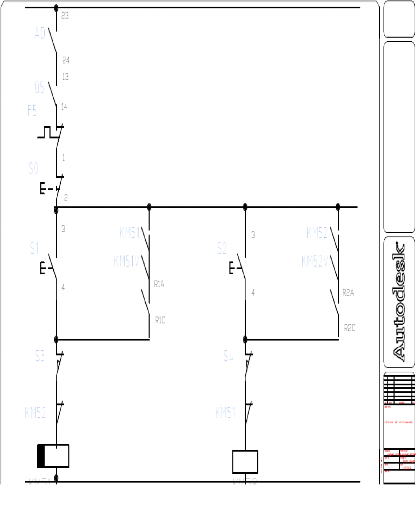
Figure 40:Schéma de commande numéro 3

Figure 41:Schéma de commande numéro 4

Figure 42:Circuit de commande numéro 5

Figure 43:Schéma de commande numéro 6

Figure 44:Schéma de commande numéro 7

Figure 45: Schéma de commande numéro 8
IoF
oô000000000 00
cc)
00000100
H KM3
· 11 SEG
q
RD
J
f
01 ..!
·
}
0
| 

