Mode 1
1
VV;Zj
= - =
; V 0
S1 SVC SVC
B C
I
V = - (IV.6)
C
S B
· Mode 2 VVV;Zj ;VV Ö
1S2 SVCSVCref
SVC
= = ?
XSL
AVAV
C max Lmax
(IV.8)
VS = V ref+ XSL· I
(IV.7)
X= =
L max
SL I
ICmax
Le SVC fonctionne en mode de régulation
· Mode 3
VV; Z=
S 2 SVC
|
j
|
1
() ; V 0
=
SVC
B B
L max Cmax
-
|
|
I
(IV.9)
V- SBB
=(LmaxCmax)
1
· Cas où VV;Z j
= = - =
; V 0
S1 SVC SVC
BC max
I
Cmax
(IV.10)
V= -
S B
Dans ce cas le SVC est fonctionne complètement en
comportement capacitif.
1
· Cas où V V;Zj
= = =
; V 0
S 2 SVC SVC
B L max
I
L max
(IV.11)
V=
SB
Le fonctionnement du SVC est complètement inductif.
IV.3.2 Modèle de contrôle du SVC en
régime dynamique
Cette section décrit les modèles appropriés
pour les études dynamiques [51] [52]
IV.3.2.1 Modèle de contrôle
simplifié
1
1+
sTm
XSL
- KI
s
ed -sT
Tb
1s +
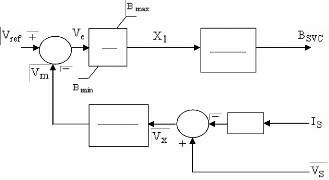
Figure IV.10 : Modèle de contrôle du SVC
Les équations décrivant le contrôleur SVC
sont :
. 1
V= - (IV.12)
m ( x m)
VV
Tm
.
X1 =- VK (IV.13)
eI
. 1
B= - (IV. 14)
(1 SVC)
XB
SVCTb
Où
Ve = Vref - Vm
(IV.15)
Vx =Vs-X SL ·Is (IV.16)
1
X
X1
=BXB = BXB
min 1 min
max 1max (IV.17)
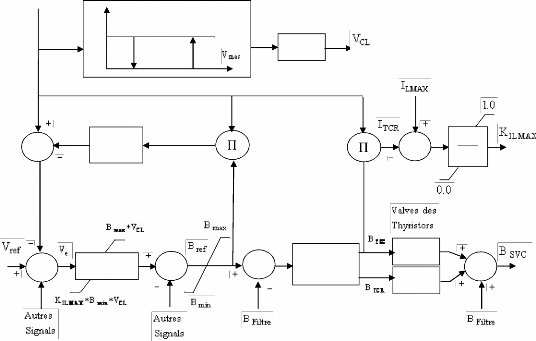
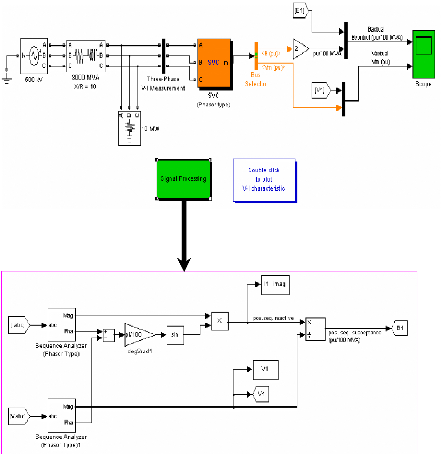
IV.3.2.2 Modèle de contrôle
détaillé
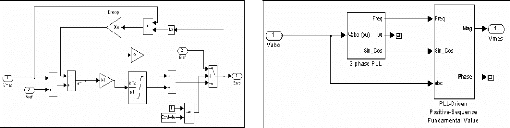
Le circuit de mesure de la tension convertit les trois
tensions fondamentales à une valeur efficace. L'erreur de signal Ve est
la tension intégrée par le régulateur (régulateur
purement intégral). Cela se traduit par un changement de l'angle
d'amorçage à thyristor pour corriger la valeur de susceptance du
SVC, ainsi réguler la tension au noeud où il est connecté
au réseau.
Le régulateur de tension détermine la valeur
Bref pour rendre le signal d'erreur Ve zéro à
l'état d'équilibre. Le courant peut être obtenu par la
multiplication de Bref et Vmes, les limites de
contrôleur de susceptance sont déterminés par la taille
physique du SVC (Bmin et
Bmax) [52].
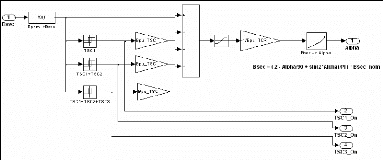
Le modèle du contrôle de phase (contrôle
l'angle d'amorçage des thyristors) est normalement
modélisé par un temps de retard (Tb). Le dispositif SVC pourrait
comporter une stratégie de contrôle qui représente la chute
de régime actuel (contrôle sous-tension) pour renforcer la
susceptance du SVC au niveau le plus bas pour empêcher la contribution de
SVC à la suite d'un défaut. Le paramètre VCL
montré sur la figure (IV. 11) peut devenir zéro
fondée sur les valeurs limites sélectionnées pour Vl (low
voltage) et Vh (high voltage). Un limiteur de courant est normalement
prévues pour réduire le courant inductif actuelle à
l'intérieur d'un temps prédéfini (T4 est d'environ 1
seconde).
e-
s Tb
Distributeur
B
e-s
Tb
e-s
Tb
Régulateur
La pente
XSL
ISVC
F
0.0
1.0
VL
VH
1 sT4
Figure IV.1 1 : Modèle de contrôle du SVC pour
l'étude dynamique (modèle détaillée) [7]
IV.4 Simulation
IV.4.1 Performances du compensateur statique
SVC
Figure (IV.12) illustre un modèle de SVC
connecté à un réseau électrique (voir annexe C). Ce
modèle utilisé pour régler la variation de la tension du
réseau due à une petite perturbation au noeud où il est
connecté. Les paramètres du réseau et du contrôleur
SVC sont donnés comme suit:
- Source de tension : 500 KV, 60 Hz.
- Puissance du court circuit de système : 3000 MVA.
- Puissance de la charge : Pch = 10 MW (Qch = 0 Mvar).
- Compensateur statique SVC : XSL= 0.03 p.u/200 MVA, + 200 Mvar /
-100 Mvar.
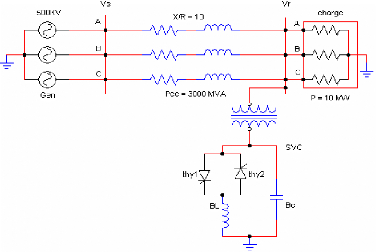
Figure IV.12: Schéma d'un SVC connecter à un
réseau électrique
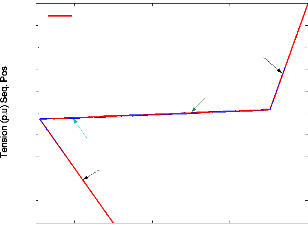
IV.4.1.1 Caractéristique tension-courant en
régime permanent
Figure (IV. 13) illustre les performances de l'état
d'équilibre et dynamique d'un compensateur SVC opérer en mode de
régulation de la tension sur une plage dynamique continue s'étend
de 200 Mvar capacitif à 100 Mvar inductif à 60 Hz.
Caractéristique d'exploitation normale du
compensateur statique
1.5
1.4
1.3
spécifié mesuré
B =1 pu/100 MVA
1.2
1.1
Vref=1 .0 pu
1
0.9
Xs= 0.03 pu/200 MVA
0.8
B =2 pu/1 00 MVA
0.7
0.6
0.5
-2 -1.5 -1 -0.5 0 0.5 1 1.5
Capacitive Inductive
Courant réactif (pu/1 00 MVA)
Figure IV. 13: Caractéristique tension-courant
de compensateur statique SVC
Le compensateur peut fonctionner d'une façon continue
sur toute sa plage de puissance: 200 Mvar capacitif à 100 Mvar inductif.
Les susceptances réactives données ici sont vue du secondaire du
transformateur à une tension de référence (Vref = 1 p.u).
La figure (IV. 12) illustre la caractéristique tension-courant de
compensateur statique SVC.
Sur cette figure, on constate que la pente de la
caractéristique d'exploitation normale du compensateur n'est pas nulle.
En effet, le TCR est commandé de telle sorte que la pente de la
caractéristique, aussi appelée statisme, soit de l'ordre de 0.03
p.u sur la base de puissance du compensateur SVC (200 MVA).
Ce statisme (Slope) assure une certaine stabilité du
compensateur en régime dynamique et transitoire.
Le SVC fonctionne en réglage de tension, le
système de contrôle ajuste le courant dans le SVC de façon
à ce que le courant et la tension suivent la courbe
caractéristique représentée à la figure (IV. 12).
Cette courbe est une droite dont la pente et la tension de
référence peuvent être ajustées par le
système de contrôle.
IV.4.1.2 Contrôle de la susceptance du SVC et
régulation de la tension
Ces essais au simulateur consistaient à produire des
perturbations à la barre où il est installé le
compensateur statique, afin de vérifier s'il était en mesure de
contrôler rapidement les variations de tension à la suite de ces
perturbations.
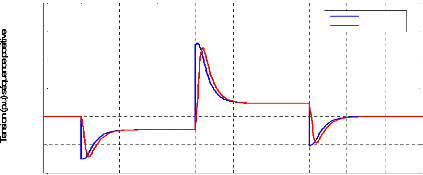
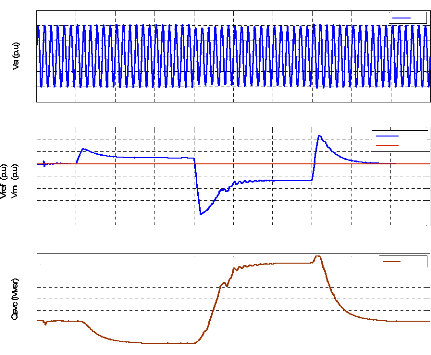
Figure (IV.14-a) illustre la susceptance primaire réel
et la susceptance primaire calculée (contrôlée) par le
compensateur statique SVC. Cette susceptance est une image de la puissance
réactive du compensateur.
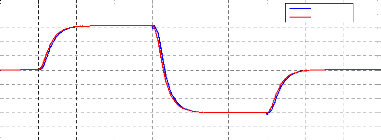
Figure (IV. 14-b) représente la tension réelle
vue de primaire du transformateur et la tension primaire mesuré.
Initialement, la tension est stable (tension nominale 500 KV). Lorsque la
tension du réseau diminue Vm = 0,97 p.u à t = 0.1s (chute de
tension), a cette instant le compensateur statique intervient pour
régler la tension du noeud où il est connecté au
réseau, le régulateur intégral (Ki = 300, Kp = 0)
contrôle la susceptance (Bref) du compensateur de
tel sorte qu'elle devienne purement capacitif, le courant du SVC devient plus
capacitif (en avance par rapport à la tension), le compensateur SVC
génère la puissance réactive au réseau, ce qui tend
à réduire la chute de tension.
(a)
1
0.8
0.6
0.4
0.2
Controle de la susceptance du compensateur statique
0

-0.2
-0.4
-0.6
-0.8
-1
B réel
B controlé
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
(b) Variation de la tension du réseau
1.08
1.06
1.04
1.02
1
0.98
0.96
V réel
V mesuré
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Temps (s)
Figure IV.14 : Résultats de simulation du compensateur
SVC
a) Susceptance Primaire réel et susceptance primaire
contrôlé par le SVC
b) Tension primaire réel et tension primaire
mesuré du réseau
Puis la tension du réseau est brusquement
augmenté à t = 0,4 Vm = 1,03 p.u, le régulateur
contrôle la susceptance Bref du compensateur de façon
à ce que la susceptance devienne purement inductif, le courant du SVC
devient plus inductif (en retard par rapport à la tension), dans ce
moment le compensateur statique absorbe la puissance réactive ce qui
contribue à maintenir la tension à la référence.
Comme nous pouvons le constater, la tension
contrôlée par le régulateur du compensateur statique varie
dans des limites tout à fait acceptables avant de revenir à une
valeur proche de la valeur de consigne Vm = Vref
= 1 p. u àt = 0.7 s.
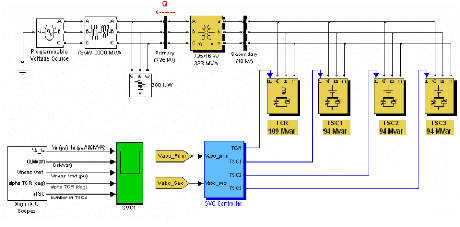
IV.4.2 Contrôle des tensions et des puissances
réactives sur un réseau de transport d'énergie
électrique
Le type de compensateur statique dont il question dans cette
partie de chapitre est utilisé pour régler la tension et la
puissance réactive transit dans un réseau de transport, 6000 MVA
à 735 KV (voir annexe D).
Le dispositif SVC est connecté au réseau
à travers d'un transformateur de couplage 735KV/16KV 333 MVA (XT= 15%),
ce dernier est utilisé pour abaisser la tension de 735 KV au primaire
à 16 KV au secondaire. Cette opération est nécessaire pour
une utilisation adéquate des thyristors de TCR et des TSCs. Le SVC est
composée de trois bancs de condensateurs (3-TSCs) de 94 Mvar chacun
à 16 KV ce qui fait un total de 282 Mvar capacitif, et un banc
d'inductance contrôlée par thyristors (1-TCR) de 109 Mvar inductif
à 16 KV et à 60 Hz.
Une commande appropriée de l'angle d'amorçage
des thyristors de TCR permet une variation continue de l'amplitude de la
composante fondamentale du courant dans le TCR.
Vu du réseau, cette variation de courant inductif est
perçue comme une variation de la susceptance du compensateur. Le
compensateur peut donc opérer sur une plage dynamique continue de 109
Mvar. L'ajout de condensateurs commutables a pour effet de déplacer
cette plage dynamique dans la zone capacitive du compensateur.
Si aucun condensateur n'est en service, la plage dynamique
s'étend de 0 Mvar à 109 Mvar inductif. Si un condensateur de 94
Mvar est en service, la plage dynamique du compensateur est restreinte à
94 Mvar capacitif jusqu'à 15 Mvar inductif. De même, si un
deuxième condensateur est mis en service, la plage dynamique
s'étend de 188 Mvar capacitif jusqu'à 79 Mvar inductif. De cette
façon, le compensateur peut fonctionner d'une façon continue sur
toute sa plage de puissance : 282 Mvar capacitif jusqu'à 109 Mvar
inductif.
La susceptance équivalente du SVC vu de coté
primaire du transformateur, peut être varié en continue de -1.04
(p.u/100 MVA) inductif jusqu'à 3.04 (p.u/100 MVA) capacitif. Cette
susceptance est une image de la puissance effective du compensateur statique
SVC.
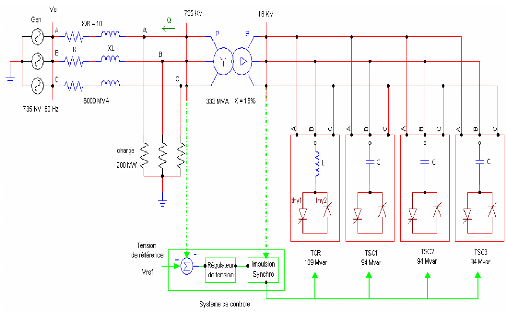
Figure IV.15: SVC +300 Mvar/-100 Mvar connecté sur un
réseau électrique à 735 KV
Le régulateur de la tension envoie des impulsions aux
gâchettes des 24 thyristors (2 thyristors par phase) afin d'obtenir la
susceptance requis par le régulateur.
Le SVC est en mode de réglage de la tension, sa tension
de référence est fixé à 1.0 p.u, la chute de
tension en régime actuel (voltage droop) est de 0.01 p.u/100
MVA (0.03 p.u/300MVA).
Par conséquent, lorsque le SVC change sont point de
fonctionnement de (+3 00 Mvar) capacitif à (-100 Mvar) inductif, la
tension du SVC varie entre 1-0.03 = 0.97 p.u jusqu'à 1+0.0 1 = 1.01 p.u.
Le régulateur de la tension est de type purement intégral (Kp = 0
et Ki = 800), la pente (statisme XSL= 1%).
Chapitre IV : Simulations et analyses des
résultats
Courant de phase A (Seq.Pos).
(a)
2
1.5
Ia
1
0
-1
-1.5
-2
m 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
(c)
1.06
1.04
1.02
Vm Vref
1
0.98
0.96
0.94
0.92
0.9
Tension de référence et Tension mesuré
m 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
(b)
1.5
1
0.5
0
-0.5
-1
-1.5
Tension de phase A (Seq.Pos)
Va
m 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
(d)
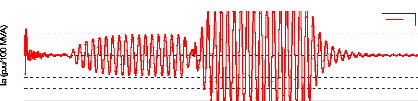
300
Qsvc
250
200
150
100
50
0
-50
-100
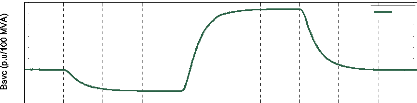
(e)
m 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Qsvc absorber et injecter sur le réseau
Susceptance primaire calculée par le compensateur statique
SVC
3
2.5
Bsvc
2
1.5
1
0.5
0
-0.5
-1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Temps
Figure IV.16: Simulation de la réponse dynamique du
compensateur SVC a) et b) Formes d'ondes du courant et de la tension de la
phase A.
c) Tension primaire mesurée (séquence
positive).
d) Puissance réactive absorber et injecter par le SVC
e) Susceptance primaire contrôlé par le SVC
Au départ de la simulation, la tension de la source est
fixée à 1.004 p.u, la tension mesurée au primaire du
transformateur égale à la tension de référence 1
p.u (figure IV. 16- d), à ce moment le SVC est hors service, le courant
débité est nulle (figure IV. 16-a).
Ce point de fonctionnement est obtenu avec TSC1 en service
(figure IV.17.b) et le TCR presque en pleine conduction á = 96°
(figure IV.17-a).
À t = 0.1s, la tension au primaire est subitement
passé à 1.025 p.u, le SVC réagit en absorbant la puissance
réactive (Q = - 95 Mvar) afin de maintien la tension à 1.0.1
p.u.
Les 95% de temps d'établissement sont d'environ 135 ms. A
ce stade, les trois TSCs sont hors services, et le TCR est presque en pleine
conduction (á = 94°).
À t = 0.4s, la tension est brusquement ramené
à 0.93 p.u, à cette instant, le SVC génère 256 Mvar
de sa puissance réactive, ce qui fait augmenter la tension à
0.974 p.u. A ce stade, les trois TSCs sont en service, et le TCR absorbe
environ 40% de sa puissance réactive nominale á = 120°
(figure IV.18-a).
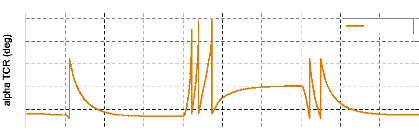
Amorçage de l'angle alpha (deg)
(a)
180
alpha TCR
160
140
120
100
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Nombre TSCs en service
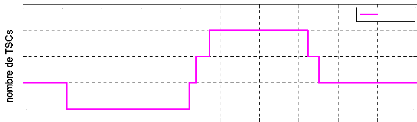
(b)
4
n-TSCs
3
2
1
0
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9

Figure IV.17: Signaux de commande envoyer aux gâchettes
des thyristors de TCR et TSCs
a) l'amorçage de l'angle á.
b) nombres de TSCs en service.
Le circuit de commande des gâchettes des thyristors de
TCR et des TSCs utilise la tension secondaire comme tension de synchronisation.
Comme cette tension est déformée à cause de son spectre en
fréquence complexe, les performances du système de
synchronisation sont dégradées. Ce phénomène,
causé en majeure partie par la saturation magnétique de
transformateur du compensateur (tenant compte de la réactance de fuite
du transformateur XT). Sur la figure (IV.17-b), on observe comment les trois
TSCs sont allumés et éteints (séquentiellement). Chaque
fois qu'un TSC est allumé, l'angle d'amorçage á change de
180° (conduction nulle) à 90° (conduction plein)
illustrée sur la figure (IV.17-a).
Enfin, au temps t = 0.8s, le compensateur statique SVC
à réussi le maintien de la tension du réseau à la
tension de référence (1.0 p.u), et sa puissance réactive
(QSVC) généré au réseau est
réduite à zéro.

(a)
-1
2
0
2
1
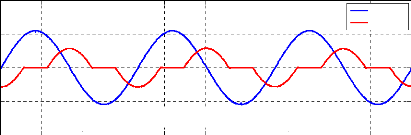
á = 120
Vab sec Iab TCR
0.65 0.655 0.66 0.665 0.67 0.675 0.68 0.685 0.69 0.695 0.7
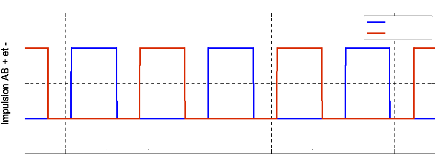
(b)
1.5
Impulsion envoyer aux gachettes des thyristors
impulsion + impulsion -
1
0.5
0
-0.5
0.65 0.655 0.66 0.665 0.67 0.675 0.68 0.685 0.69 0.695
Temps (s)
Figure IV.18: Tension et courant dans le TCR pour un angle
d'amorçage á = 120°
a) courant de TCR dans la branche AB.
b) impulsions (+ & -) généré par le
système de commande.
Chapitre IV : Simulations et analyses des
résultats
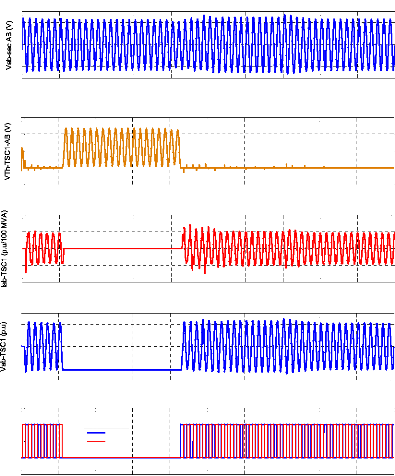
x 104 Tension secondaire max (V) branche AB
3
2
0
-2
-3
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
x 104 Tension aux bornes de thyristors-TSC1 (V) AB
6
4
2
0
-2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Courant généré par TSC1
2
1
0
-1
-2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
1.5
1
0
-1
-1.5
Tension aux bornes de TSC1 (p.u) AB
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Impulsions (+/-)
1.5
1
0.5
0
-0.5
Impul + Impul -
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Temps
Figure IV.19: Résultats de simulation du TSC1 (branche
AB)
Chapitre IV : Simulations et analyses des
résultats
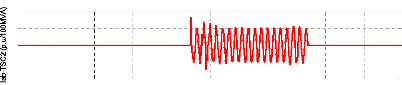
Courant généré par TSC2 (branche AB)
2
1
0
-1
-2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Tension aux bornes de TSC2 (branche AB)

1.5
1
0.5
0
-0.5
-1
-1.5
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Impulsions ( + / - )
1.5
1
0.5
0
-0.5
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9

Impul + Impul -
Temps
Figure IV.20: Résultats de simulation du TSC2 (branche
AB)
Courant généré par TSC3
2
1
0
-1
-2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
1.5
1
0.5
0
-0.5
-1
-1.5
Tension aux bornes de TSC3 (AB)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Impulsion (+/-)
1.5
1
0.5
0
-0.5
Impul + Impul -
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Temps
Figure IV.21: Résultats de simulation du TSC3 (branche
AB)
Courant absorbé par TCR (p.u) branche AB
1.5
1
0.5
0
-0.5
-1
-1.5
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Amorçage de l'angle alpha

180
160
140
120
100
80
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9

Signaux de commande
1.5
1
Impul + Impul -
0.5
0
-0.5
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Temps
Figure IV.22: Résultats de simulation du TCR (branche
AB)
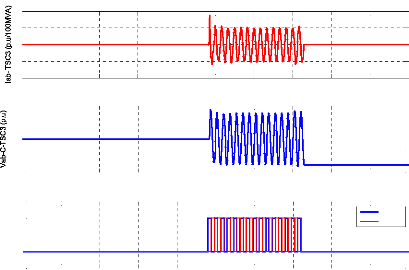
Les tensions et les courants dans les trois TSCs ainsi dans le
TCR et les signaux de commande qui contrôle les gâchettes des
thyristors sont illustrés sur les figures (IV. 19) (IV.20) (IV.21)
(IV.22). On remarque que dans l'intervalle du temps [0,0.1] s, la tension
mesuré par le compensateur statique suivre la tension de
référence, le TSC1 et le TCR sont en service car ils sont en
conduction. TSC2 et TSC3 sont hors service, le TSC1 débit au
réseau un courant capacitif de telle sorte que la puissance
réactive transits sur le réseau reste dans les limites
désirées. A ce moment le TCR opère en parallèle
avec le TSC1 (figure IV.22) en cas d'un dépassement de courant capacitif
sur le réseau.
A l'instant t = 0.135s, une surtension est parvienne sur le
réseau, dans les premiers instants qui suivent l'élimination de
cette perturbation (0.135s à 0.4s), le courant capacitif dépasse
les limites, à ce moment les trois TSCs sont hors service (aucun courant
capacitif est débité au réseau), le TCR fonctionne en
pleine conduction á = 94° (purement inductif) pour maintien la
tension à la référence.
A l'instant t = 0.4s, la tension est brusquent chuté
à 0.93 p.u, à cette instant, le SVC génère 256 Mvar
de sa puissance réactive, ce qui fait augmenter la tension à
0.974 p.u. Durant la simulation de ce problème, les trois condensateurs
commutables sont en service
(courant capacitif maximum débité par ces
derniers), le TCR est faiblement sollicité (á = 120°) de
sorte que le compensateur SVC reste plafonné au voisinage de son niveau
maximum capacitif (282 Mvar).
Les trois TSCs cessent de conduire et la puissance
réactive injecter au réseau dégrade par étape de 94
Mvar (en premier étape en déclenche le TSC3, puis en deux
étape en déclenche le TSC2), alors que le TCR essaie d'amortir
l'oscillation de tension à l'instant t = 0.7 s. Après cette
durée, juste le TSC1 et le TCR restent en service jusqu'à qu'ils
maintiennent la tension à la référence, cette action est
réalisée à l'instant t = 0.8 s. (figure IV.16)
Si par erreur les impulsions d'amorçage ne sont pas
envoyées au bon moment, de très grandes surcharges peuvent
être observés dans les valves de TSCs.
Le système de protection du système de
synchronisation, inclus dans le contrôleur du compensateur, interrompt
les impulsions d'amorçage des thyristors. Dans ces conditions, le
compensateur statique est complètement hors service (QSVC = 0 Mvar). Le
réseau alimente le transformateur du compensateur statique, dont le
secondaire est à vide.
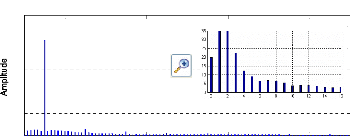
IV.5 Simulation des harmoniques dans le
TCR
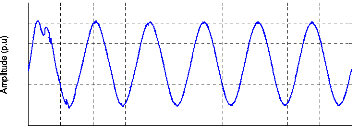
Distorsion de tension aux bornes de TCR-ab ( 6 cycle)
1.5
1
0.5
0
-0.5
-1
-1.5
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1
Temps
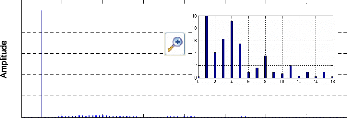
Fondamental (60Hz) = 1.001 , THD = 2.55%
1
0.8
0.6
0.4
0.2
0
0 2 4 6 8 10 12 14 16
Ordre d'harmonique
Figure IV.23 : Distorsion de Tension aux bornes de TCR-AB et
l'ordre d'harmonique
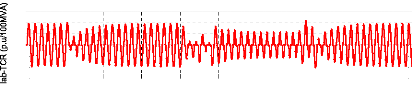
Figures (IV.23), (IV.24) illustrent la déformation des
ondes de tension et du courant, le taux de distorsion d'harmonique de la
tension est de 2.55% et le taux de distorsion d'harmonique du courant est de
9.90%. L'harmonique d'ordre 3 et multiple de 3 est presque
éliminé, car le TCR est branché en triangle (en Delta).
Des filtres d'ordre réduit sont placés sur le réseau en
parallèle avec le compensateur statique SVC à pour but
d'éliminés le 5ème , 7ème et
1 1ème harmoniques. Les autres harmoniques sont
négligeables par rapport à la composante fondamentale.
Courant dans TCR-AB
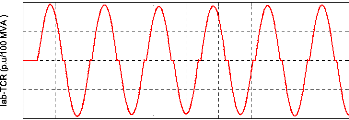
1
0.5
0
-0.5
-1
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1
Temps
Fondamental (60Hz) = 0.8708 , THD = 9.90%
1
0.8
0.6
0.4
0.2
0
0 2 4 6 8 10 12 14 16
Ordre d'harmonique
Figure IV.24 : Distorsion de Courant dans le TCR-AB et l'ordre
d'harmonique
IV.6 Conclusion
Dans ce chapitre, nous avons montré le modèle de
contrôle du SVC, ainsi on a étudiés deux modes de
fonctionnement (mode de contrôle en régime permanent et mode de
contrôle en régime dynamique). Les résultats des
simulations obtenus, montrent que le SVC permet de contrôler la tension
et la puissance réactive du réseau de manière plus
flexible et plus sûre.

Conclusions générales et perspectives
d'avenir
Le travail présenté dans ce mémoire est
une contribution originale au problème de contrôle des puissances
réactives et des tensions dans un réseau de transport
d'énergie électrique.
L'approche proposée s'est concentrée en
particulier sur l'élimination de violation des contraintes de tensions
survenue lors des perturbations et le contrôle des puissances
réactives transmises sur le réseau. L'objectif à un but
d'étudier un dispositif de réglage sur lequel on agit pour
contrôler aussi rapidement la variation de la tension, ainsi le transit
de puissance réactive d'un réseau électrique.
Ce travail a commencé par l'analyse de la tenue de la
tension sur le réseau électrique ainsi l'intérêt de
la compensation des lignes de transport d'énergie électrique.
Dans ce contexte, plusieurs types de dispositifs FACTS ont
été présentés tel que le compensateur statique de
puissance réactive, le compensateur statique synchrone, le compensateur
série à thyristors, les régulateurs de tension, les
dispositifs déphaseurs et le contrôleur de transit de puissance
unifié, ainsi d'autre dispositifs FACTS.
Parmi ces outils de contrôle, on a choisi le
compensateur statique de puissance réactive (SVC) à cause de sa
simplicité de contrôle et son coût dans le marché
(moins cher par rapport aux autres FACTS). L'étude du compensateur
statique SVC, présentée dans ce travail, est constituée de
trois parties, à savoir:
· Description des éléments qui constituent
le dispositif SVC.
· Modélisation du compensateur statique et sont
principe de fonctionnement.
· Contrôle optimal de puissance réactive
compensée sur le réseau électrique par dispositif SVC.
Le réglage des tensions et le contrôle des
puissances réactives d'un réseau électrique au moyen de
dispositifs SVC à été vérifier par des simulations
faites sur des réseaux de transport d'énergie électrique
sous environnement Matlab.
Les résultas obtenues par les simulations, nous
montrent que la tension contrôlée par le régulateur du
compensateur statique SVC varie dans des limites tout à fait acceptables
avant de revenir à une valeur proche de la valeur de
référence, le régulateur de tension contrôle la
susceptance (Bref) du compensateur statique, et comme cette
susceptance est une image de la puissance réactive, cette
dernière sera calculée directement par le compensateur afin de
développer (ou absorber) la puissance réactive
dans la barre où le SVC est connecté au noeud du réseau de
manière à satisfaire la demande de puissance réactive de
la charge de manière plus flexible et plus sûre.
Avant de terminer cette conclusion, il serait
intéressant de proposer quelques thèmes pouvant constituer une
suite à ce travail:
Développements futurs
Afin de compléter les travaux effectués dans ce
mémoire, on peut envisager quelques sujets de recherche suivants:
· Le premier sujet consisterait en une intégration
d'une stratégie de contrôle coordonnée des dispositifs
FACTS dans le réseau électrique.
· Le deuxième sujet consisterait à la
conception d'un système expert, basé sur les méthodes de
l'intelligence artificielle pour l'optimisation des tensions et des puissances
réactive dans un réseau d'énergie électrique, qui
remplace les méthodes conventionnelles basées sur un
modèle complet du réseau pour effectuer une optimisation globale.
Cependant, la modélisation demandes des données complètes
du réseau qui en réalité sont très difficiles
à collecter. Donc il faut développé une technique
basé sur l'optimisation locale. D'où le choix de l'approche
système expert basé sur les algorithmes heuristiques
composés d'une série de règles et qui prennent en
considération les connaissances des opérateurs.
· La considération de l'objectif
économique de l'optimisation des tensions et des puissances
réactives dans l'approche. Celle-ci permettrait d'améliorer
encore plus des décisions prises par le système expert.

Bibliographie
[1] Henri Persoz, Gérard Santucci, Jean-Claude Lemoine,
Paul Sapet « La planification des réseaux électriques »
Editions EYROLLES 1984.
[2] Michel Crappe « Commande et régulation des
réseaux électriques » Chap.2 Traité EGEM série
génie électrique, LAVOISIER 2003.
[3] Hanene Kouara « Application d'un filtre actif
série au contrôle de la tension d'un réseau basse tension
» mémoire de magister, université de batna 28/02/2006.
[4] De Vre R, Jacquet B « Perturbations dans les
installations électriques et électroniques Problèmes et
solutions» Note d'information.
[5] Jacques .C, Guillaume de Preville, Jean-Louis Sanhet «
Fluctuations de tension et flicker - Évaluation et atténuation
(partie I et II) » Techniques de l'ingénieur D 4315.
[6] Philippe Ferracci « La Qualité de
l'énergie électrique » Cahier Technique n° 199.
[7] Nelson David Epp « A Self-Tuning Filter for the
Mitigation of Power System Harmonics » mémoire de master en
science, université de Alberta, Edmonton 2000.
[8] Derek A. Paice « Power Electronic Converter Harmonic
» IEEE Press New York 1996.
[9] T. Gönen « Electric Power System Engineering:
Analysis and Design » John Wiley & Sons, Edition 1988.
[10] Giuseppe Fusco, Mario Russo « Adaptive Voltage
Control in Power Systems; Modeling, Design and Applications » Chap. 1" The
voltage control problem in power systems" Université degli Studi di
Cassino Septembre 2006, Italie.
[11] B.De Metz-Noblat, G .Jeanjean « Stabilité
dynamiques des réseaux électriques industriels» Cahier
Technique n° 185.
[12] P. Kundur « Power System Stability and Control »
IEEE Transactions on Power System 1994.
[13] Richard Gagnon « Étude de la
Ferrorésonance dans les réseaux compensées séries
et
shunt » thèse doctorat université de LAVAL, QUEBEC.
Canada, Mai 1997.
[14] Sami. Repo « On-line Voltage Stability Assessment of
Power system - An approach of Back-box modelling » thèse doctorat
université de Tampere 2001.
[15] CHOKRI Ben Salah Belhadj Ahmed « Contribution à
l'analyse de la stabilité statique de la tension » thèse de
doctorat, Ecole Polytechnique de MONTRÉAL Juin 1996.
[16] J.D. Glover, M. Sarma « Power System Analysis and
Design » PWS Publisher company, 1994.
[17] C.A. Gross « Power System Analysis"; John Wiley &
Sons, Edition 1986.
[18] Daniel J. Sullivan « Improvements in voltage control
and dynamic performance of power transmission systems using Static Var
Compensators (SVC) » mémoire de Master, université de
Pittsburgh, Pennsylvania, USA 5 Avril 2006.
[19] Pierre Alexandre Bohême « Simulation of Power
System Response to Reactive Power Compensation » thèse de Master,
Université de Tennessee, Knoxville 2006.
[20] F. Cherif « Analyse et amélioration de l'indice
de la non-symétrie de tension dans la qualité de l'énergie
électrique » thèse de doctorat, université de
Batna,27 Mai 2006.
[21] E. Acha, V.G. Agelidis, O. Anaya-lara, T.J.E. Miller «
Power Electronic Control in Electrical Systems » Chap.3 "Transmission
system compensation" edition 2002.
[22] Emmanuelle. Catz « Evolutions techniques du
système de transport et de distribution d'électricité
». Supélec 1999, France.
[23] Besanger.Y, Feuillet R « Étude de l'insertion
des FACTS dans les réseaux de transport et d'interconnexion. »
Travaux Universitaires ; Institut national polytechnique de Grenoble, Grenoble,
France 1996.
[24] J. Loughran « ALSTOM relocatable SVCs for National
Grid Company» AREVA T&D, UK 1999.
[25] D. Lachenal, D. Daniel « Nouveaux matériels
pour réguler les flux de puissances: Transformateur déphaseur et
moyens de compensation série » RTE MAG, 2002.
[26] K. Belacheheb « Contribution à l'étude
des systèmes de compensation FACTS en général, UPFC en
particulier, pour le contrôle du transit de puissance dans un
réseau de transport », thèse de doctorat de
l'université de Henri Poincare Nancy1.
[27] N.G. Hingorani, L. Gyugyi « Understanding FACTS
», IEEE Press NewYork,2000.
[28] M. Nadarajah, A. Sode-yome, A. Naresh « Application of
FACTS Controllers in Thailand Power Systems » School of Environment,
Resources and Development Asian Institute of Technology Pathumthani, Thailand
January 2005.
[29] E.S. Gholipour «Apport de l'UPFC à
l'amélioration de la stabilité transitoire des réseaux
électriques » Thèse de doctorat de l'Université Henri
Poincaré, Nancy-I, 13 Octobre 2003.
[30] D.J. Thanson, C. Horwill, J. Loughran «The Application
of a Relecotabale STATCOM-Base SVC on the UK's National Grid system ».
Article IEEE 2003.
[31] J. Dixon, L. Morán, J. Rodriguez, R. Domke «
Reactive Power Compensation Technologies, State-of-the-Art Review »
University of Santiago, CHILE 2005.
[32] M.T. Bina, D.C. Hamill « A Classification Scheme
for FACTS Controllers » School of Electronic Engineering, Information
Technology and Mathematics, University of Surrey, Guildford GU2 5XH, United
Kingdom.
[33] H. M. Tayboun « Etude et Simulation d'un FACTS par le
PSCAD/EMTDC » Mémoire de magister, Département
d'électrotechnique, Faculté des Sciences de l'ingénieur
SBA 2006.
[34] S. Gerbex « Métaheuristique appliquées
au placement optimal de dispositifs FACTS dans un réseau
électrique » Faculté des sciences et Techniques de
l'ingénieur, EPFL- Lausanne 2003, Suisse.
[35] D. Westermann, M. Rahmani, H. Stemmler, A. Beer «
Customized FACTS devices for cost effective system solutions »
International Conference on Power System Technology, Beijing, pp 313-317,
août 18-21 1998.
[36] J.J. Vithayathil « Case studies of conventional and
novel methods of reactive power control on an AC transmission system »
CIGRE paper 3 8-02, 1986.
[37] M.R. Iravani, D. Maratukulam « Review of
Semiconductor-Controlled (Static) Phase Shifters for Power System Applications
» IEEE Trans. Power Systems, 9(4):1833-1839, November 1994.
[38] L. Gyugyi « Unified Power-Flow Control Concept for
Flexible AC Transmission Systems » IEE Proc.-Gener. Transm. Distrib, pp
323-33 1, July 1992.
[39] K. Sreenivasachar « Unified Power Flow Controller:
Modelling, Stability, analysis; control strategy and control system »
Thèse de doctorat, génie électrique, université de
Waterloo, Ontario, Canada 2001.
[40] J. Lemay, J. Brochu, F. Beauregard «
Régulateurs de Puissance Interphases: la Famille des Systèmes
FACTS s'Agrandit » Revue ABB, (1): 65-7 1, 2000.
[41] R.L. Hauth, T. Humann, R.J. Newell, « Application of a
Static Var System to Regulate System Voltage in Western Nebraska » IEEE
Trans., Vol. PAS-97, No.5, pp. 1955-1964, Sept/Oct 1978.
[42] H. Tupia. Ernesto « Modélisation et analyse de
stabilité du circuit compensateur statique variable » diplôme
de maîtrise ès sciences appliquées, École
Polytechnique de Montréal, Canada 2002.
[43] Issarachai. Ngamroo « FACTS and HVDC controllers
» Sirindhorn International Institute of Technology, Thammasat University
December 16, 2004.
[44] K. Iswaran. Sothandara « Flexible Alternating Current
Transmission Systems: Static Synchronous Compensator (STATCOM) » Curtin
university, Australia 04 November 2005.
[45] Y. Besanger « Étude des FACTS et de leur
Comportement dans les réseaux de transport et d'interconnexion »,
thèse de doctorat, Institut National Polytechnique de Grenoble,
laboratoire d'électronique, 1996.
[46] C. E. Lin, T. C. Chen, C. L. Huang « Optimal Control
of a Static VAR Compensator for Minimization of Line Loss » Electric Power
Systems Research, pp 51-61, 1988.
[47] G. Sybille « Steady-state and Dynamic Performance of
the Static Var Compensator (SVC) » Hydro-Québec SimPowerSystems 4
(reference), MathWork, MATLAB Simulink version 7.2.0_2006.
[48] M. Noroozian « Modeling of SVC power system studies
» Information NR 500- 026E, ABB Power Systems AB, Reactive Power
Compensation Division, April 1996, Västerås, Sweden.
[49] H. Boudjella, F.Z Gherbi, S. Hadjeri, F. Ghazal «
Modelling and Simulation of Static Var Compensator (SVC) with Matlab »
International Conference on Modeling And Simulation, AMSE - MS'07 Algiers July,
02-04 2007, Alegria.
[50] S. G. Jalali, R. H. Lasseter, I. Dobson « Dynamic
response of a thyristor controlled switched capacitor » IEEE Trans. Power
Delivery, vol 9, pp. 1609-1615, 1994.
[51] K.R. Padiyar, V. Immanuel « Modelling of SVC for
stability evaluation using Structure preserving energy function »
Scientific paper. Department of Electrical Engineering. Indian Institute of
Science, Bangalore 560 012, India.
[52] M. Noroozian, C.W. Taylor « Benefits of SVC and
STATCOM for Electrical Utility Application » Carson Taylor Seminars,
Portland, Oregon USA 1998.
[53] H. Boudjella, F.Z Gherbi, S. Hadjeri, F. Ghazal «
Modelling and Simulation of
Static Var Compensator (SVC) in Power Systems Studies with
Matlab »
International Conference on Computer Integrated Manufacturing
CIP'2007
November, 03-04, 2007, Setif, Algeria.
[54] P. Giroux, G. Sybille « Demonstration operation of a
Static Var Compensator (SVC) » Hydro-Québec, SimPowerSystems
(Guid's), MathWork, MATLAB Simulink version 7.2.0_2006.
[55] M. Aguet « Sûreté des grands
réseaux électriques » Chef du service de
l'électricité de la Ville de Lausanne, Chargé de cours
EPFL, Forum E'Cité-Genève- SIG, 1 Juillet 2005.

Annexe A
Relation entre le coefficient S et l'angle d'amorçage
á
|
S
|
á
|
S
|
á
|
|
1.000000000
|
0
|
0.040491637
|
46
|
|
0.956164777
|
1
|
0.036280144
|
47
|
|
0.913547039
|
2
|
0.032414939
|
48
|
|
0.872144938
|
3
|
0.028875913
|
49
|
|
0.831954360
|
4
|
0.025643488
|
50
|
|
0.792970836
|
5
|
0.022699526
|
51
|
|
0.755187809
|
6
|
0.020025203
|
52
|
|
0.718597829
|
7
|
0.017602308
|
53
|
|
0.683191597
|
8
|
0.015414826
|
54
|
|
0.648959696
|
9
|
0.013445455
|
55
|
|
0.615890324
|
10
|
0.011678257
|
56
|
|
0.583971202
|
11
|
0.010098130
|
57
|
|
0.553188920
|
12
|
0.008691263
|
58
|
|
0.523529232
|
13
|
0.007443009
|
59
|
|
0.494976401
|
14
|
0.006339857
|
60
|
|
0.467513919
|
15
|
0.005369971
|
61
|
|
0.441124916
|
16
|
0.004520902
|
62
|
|
0.415790766
|
17
|
0.003781117
|
63
|
|
0.391492873
|
18
|
0.003140824
|
64
|
|
0.638211538
|
19
|
0.002589325
|
65
|
|
0.345926344
|
20
|
0.002117207
|
66
|
|
0.324616194
|
21
|
0.001715743
|
67
|
|
0.304260015
|
22
|
0.001377497
|
68
|
|
0.284835339
|
23
|
0.001094576
|
69
|
|
0.266319841
|
24
|
0.000859465
|
70
|
|
0.248690367
|
25
|
0.000666664
|
71
|
|
0.231923699
|
26
|
0.000510063
|
72
|
|
0.215995923
|
27
|
0.000384236
|
73
|
|
0.200883448
|
28
|
0.0002842 12
|
74
|
|
0.186561748
|
29
|
0.000205968
|
75
|
|
0.173006713
|
30
|
0.000146280
|
76
|
|
0.160193652
|
31
|
0.000100897
|
77
|
|
0.148097932
|
32
|
0.000067847
|
78
|
|
0.136695221
|
33
|
0.000043751
|
79
|
|
0.125960454
|
34
|
0.000027700
|
80
|
|
0.115869604
|
35
|
0.000016298
|
81
|
|
0.106397651
|
36
|
0.000009278
|
82
|
|
0.097520754
|
37
|
0.000004648
|
83
|
|
0.089214489
|
38
|
0.000001897
|
84
|
|
0.081454404
|
39
|
0.000000816
|
85
|
|
0.074217819
|
40
|
0.000000408
|
86
|
|
0.067480676
|
41
|
0.000000266
|
87
|
|
0.061219744
|
42
|
0.000000085
|
88
|
|
0.055412412
|
43
|
0.000000009
|
89
|
|
0.050036825
|
44
|
0.000000000
|
90
|
|
0.045070522
|
45
|
|
|
Annexe B
Algorithmes qui décrit le calcul numérique de la
puissance réactive compensé pour les différentes
configurations du SVC
Algorithme (a) : Compensateur statique type
FC-TCR
Etape 1
Calculer Si en utilisant eqn. (III.53).
Etape 2
ð
Si Si < 0 (ou > 1), laissez ái =
(ou 0); autrement, utiliser le tableau présenté dans
2
l'annexe (A) pour obtenir l'angle d'amorçage á.
Algorithme (b) : Compensateur statique type
TCR-TSC
Etape 1
Sélectionner ki tel que 0 = k i C t,
i- C i* < C t, i .
Etape 2
Calculer Si en utilisant eqn. (III.55).
Etape 3
ð
Si Si < 0 (ou > 1), laissez ái =
(ou 0); autrement, utiliser le tableau présenté dans
2
l'annexe (A) pour obtenir l'angle d'amorçage á.
Algorithme (c) : Compensateur statique type
TCR,TSR-FC
Etape 1
Calculer pi + Si en utilisant eqn. (III.57).
Etape 2
Sélectionner pi tel que 0 = Si = 1.
Etape 3
ð
Si Si < 0 (ou > 1), laissez ái =
(ou 0); autrement, utiliser le tableau présenté dans
2
l'annexe (A) pour obtenir l'angle d'amorçage á.
Algorithme (d) : Compensateur statique type
TCR,TSR-TSC
Etape 1
Sélectionner ki, tel que 0 =kiC t, i- C i* <
C t, i .
Etape 2
Calculer pi + Si en utilisant eqn. (III.58).
Etape 3
Sélectionner pi tel que 0 = Si = 1.
Etape 4
ð
Si Si < 0 (ou > 1), laissez ái =
(ou 0); autrement, utiliser le tableau présenté dans
2
l'annexe (A) pour obtenir l'angle d'amorçage á.
Annexe C
Modèle de phase d'un compensateur statique de puissance
réactive SVC
Annexe D
Exemple d'un compensateur statique SVC + 300 Mvar/-100 Mvar
(1TCR-3TSCs) connecté sur un réseau à 735 KV
Static Var Compensator +300Mvar/-100Mvar
Régulateur de tension Circuit de mesure
Unité de distribution
| 

