3. méthodologie :
Sujets et essais de sauts :
Notre population se compose de dix sept joueurs de
volley-ball, jouant en moyenne au niveau national du championnat de France,
dont 8 garçons (de taille 1,84 #177; 0,05 m, de masse 74,42 #177; 6,83
kg et âgés de 24,6 #177; 5,6 ans) et 9 filles (de taille 1,71
#177; 0,05 m, de masse 64,67 #177; 10,30 kg et âgées de 21,8 #177;
3,0 ans). Tous les sujets ont donné leur libre consentement pour
participer à cette expérience. Avant le début de la
session expérimentale, les sujets ont comme consigne de
s'échauffer pendant 5 minutes (trottinement et mobilisation articulaire)
et de réaliser quelques sauts à des petites hauteurs. Chaque
sujet réalise successivement 5 « sauts de contre mouvement »,
puis 5 « sauts de contre haut » de 30 centimètres et finit par
5 « sauts de contre haut » de 60 centimètres (figure.8). La
seule instruction donnée aux sujets est de : « sauter le plus haut
possible ».
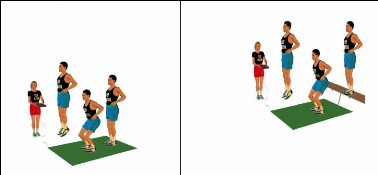
mouvement »
« Saut de contre
« saut de contre haut »
(figure.8)
Saut de contre-mouvement et saut de contre-haut
Matériels et acquisition des données
:
Dans cette étude, le corps humain a été
représenté par 4 segments : pied, cheville, cuisse et «
tete-bras-tronc », suivant un modèle bidimensionnel du corps humain
(Farley et Morgenroth 1999). (voir fig.9 et fig.10)
|
Université Paris-Sud XI UFR STAPS
|
|
|
|
Figure 9 : [Acquisition latérale
bidimensionnelle d'un CMJ (flexion)]
|
|
|
|
|
|
19
|
Figure 10 : [Acquisition latérale bidimensionnelle
d'un CMJ (extension)]
La force de réaction au sol a été
mesurée en util
isant une plate forme de force (figure.11).
La
fréquence a été réglée
à 1kH
z afin d'enregistrer la force verticale et les moments de
forces qui permettent l'estimation des moments
articulaires.
Figure 11
: plate forme de force « AMTI »
(rectangulaire)
Simultanément, on a enregistré les
données cinématiques en utilisant 6 caméras infrarouges
« VICON » (figure.12)
à une fréquence de 500Hz, le volume de
l'espace de calibration étant de 2m de largeur x 1m de
profondeur x 2.80m d'hauteur (calibration standard selon la procédure
recommandé par le constructeur des caméras).
L'erreur moyenne associée aux points de reconstruction a
été inférieur à 1mm (SD
: 0.1 mm) suivant les axes X, Y et Z. Des marqueurs
réfléchissants ont été placés sur
les emplacements suivants
: l'articulation du premier métatarse, la
malléole externe, l'épicondyle
(voir annexe).
latéral du fémur, le grand trochanter et
l'épine acromiale Les données cinématique et
de la plate forme de force, en utilisant un minuteur
électronique externe.

Figure.12: caméra Vicon
La vitesse verticale du centre de masse (VVCM) est
obtenue par l'intégration de la force de
réaction au sol (VGRF). La VVCM initiale au moment du toucher du sol a
été estimé [6, 3b] :
par la méthode de l'énergie
potentielle
v = (-2g x h drop)
1/2
(Avec g
: accélération gravitationnelle, h
drop
: hauteur initiale = hauteur du contre
haut.)
En partant du fait que la position initiale du CM des
sujets sautant à partir d'un contre haut peut
être différente de la hauteur réelle, on a utilisé
les données cinématiques pour
al du centre de
évaluer plus précisément la hauteur
réelle de chute. Le déplacement vertic
masse est calculé à partir de la double
intégration de l'accélération [9, 11, 12]. Pour
calculer les données absolues relatives à la position, on
observe la hauteur du centre de masse du sujet à un
point donné dans le temps. Le point zéro correspond à la
hauteur du CM au moment du contact initial [10].
Le taux de développement de la force (RFD) est
obtenu par le calcul de la dérivée de la force
de réaction au sol. La puissance mécanique est obtenue par
la
multiplication de la force verticale de réaction au sol
par la vitesse verticale durant le temps de contact du sol. La performance en
saut a été calculée à partir du temps d'envol
(d'après Komi et al.), en utilisant : h = (g x
t2)/2 , où t est l'équivalent
de 1/2 temps de vol et g est l'accélération
gravitationnelle. L'impulsion a été obtenue par
l'intégration de la VGRF sur la période du contact avec le
sol.
La raideur des membres inférieurs est
considérée comme un concept mécanique
général du comportement global du corps durant le saut. Durant la
phase de contact, la longueur des membres inférieurs est définie
comme la distance qui sépare la centre de masse corporelle et le pied,
considéré comme le centre de rotation durant le contact du sol.
La raideur des membres inférieurs est définie comme le rapport de
force maximale de réaction au sol Fmax durant le pic actif
sur l'abaissement Är au moment de la flexion maximale des membres
inférieurs [1,5] :
kleg =F max
Ar max

Outil statistique : Analyse de la variance
:
On a utilisé une analyse de la variance « ANOVA
» avec mesures répétées à un facteur pour
tester l'effet et la hauteur du contre-haut sur les paramètres
biomécaniques de saut (facteurs intragroupes, dépendants), et
l'effet du genre (comparer les facteurs intergroupes, dépendants), avec
un seuil de signification : p<0,05.
| 

