|

1
République Algérienne Démocratique et
Populaire
Ministère de l'Enseignement Supérieur et de la
Recherche Scientifique
Université de Béchar
Institut des
sciences exactes
Département d'Informatique
Promotion :
2009/2010
Mémoire Pour l'obtention
Du Diplôme de
Licence En Informatique
Etat de l'art sur les réseaux de
capteurs sans fil.
Réalisé par :
· KABOU Salaheddine
· Belgourari Abdessamed
? Encadreur : Mr. BENAHMED Khelifa.
Année Universitaire : 2009/2010

Université de Béchar
Institut des sciences
exactes
Département d'Informatique
Etat de l'art sur les réseaux de
capteurs sans fil.
Kabou Salaheddine
Kabou.salaheddine@yahoo.fr

Juin 2010

3
DEDicAcEs
Merci au dieu
Je dédie ce modeste travail à tous ceux qui me sont
chers au coeur
A mon cher pre Ehladj, qui m'a beaucoup aidé par son
soutien et encouragement tout au long de mes études, qui m'accompagner
durant tous les moments avec ses prières.
A mes chers frères et cheres soeurs
A toute la famille de prés et de loin.
A mon cher ami Abdessamed et à sa famille, je le souhaite
les meilleurs voeux. A tous mes amis (ies).
A mes respectables professeurs.
A mes collègues de promotion.
A tous ceux qui m'aiment et ceux que j'aime.
A tous ceux qui comptent pour et que je compte pour eux.
Enfin à tous ceux qui sentent participant dans ma
réussite, et à toute personne qui reconnaîtra son empreinte
sur ce modeste travail,
Je dédie ce travail.
Que la paix d'ALLAH soit avec tous...Que dieux nous
réunisse dans son vaste paradis inchALLAH.
SALAHEDDiNE

REMERCIEMENTS
Au terme de ce projet de fin d'étude et en
préambule au mémoire rédigé nous tenons à
adresser nos remerciements à tous les professeurs qui nous ont
enseignés au cours des trois années du cursus universitaire pour
l'obtention du diplôme de licence.
Nous remercions particulièrement avec gratitude tous
les membres du jury qui nous ont fait l'honneur de prendre notre modeste
travail en considération et en suite de le juger.
Nous exprimons notre reconnaissance et nos plus vifs
remerciements à notre encadreur « Mr. BENAHMED Khelifa
» pour ses conseils, son aide, pour son soutient moral et
scientifique efficace et constant durant toute cette année.
Nous remercions l'administration universitaire de
Béchar et nous tenons à remercier tous ceux qui nous ont
prêté main forte, et ceux qui ont contribué de prés
ou de loin à l'élaboration de ce travail.
SALAHEDDINE ET ABDESSAMED
SommAirE

5
DédicAcEs 03
REmErciEmENT 04
LisTE dEs FiGurEs 09
LisTE dEs TABlEAuX 11
LisTE dEs ABréviATioNs 12
INTroducTioN GéNérAlE 13
I- Généralité sur les
réseaux de capteurs sans fils
I.1 Introduction 16
I.2 Les réseaux ad hoc 16
I.2.1 Description détaillé 16
I.2.2 Les problèmes de l'ad hoc 17
I.3 Les réseaux de capteurs sans fil
18
I.3.1 Définitions 18
I.3.2 Caractéristiques des RCSF 19
I.3.3 Comparaison entre les RCSF et Ad hoc 20
I.3.4 Architecture d'un capteur 20
I.3.4.1 Modèle d'un capteur 21
I.3.4.2 Description 21
I.3.5 Architecture des RCSF 22

I.3.5.1 RCSF plats 25
I.3.5.2 RCSF hiérarchiques 25
I.4 Pile protocolaire 26
I.4.1 Rôles des couches 27
I.4.2 Plan de gestion 27
I.5 Applications des RCSF 28
I.5.1 Applications orientées temps 28
I.5.2 Applications orientées événements
30
I.5.3 Applications orientées requêtes
30
I.5.4 Applications hybrides 30
I.6 Facteurs et contraintes des RCSF 31
I.6.1 Durée de vie du réseau 31
I.6.2 Ressources limitées 31
I.6.3 Bande passante limitée 31
I.6.4 Facteur d'échelle 31
I.6.5 Topologie dynamique 32
I.6.6 Agrégation de donnée 32
I.7 Conclusion 32
II Economie d'énergie, la couverture et
la
connectivité dans les RCSF
II.1 Introduction 35
II.2 Consommation d'énergie dans les RCSF
35
II.2.1 Facteurs intervenants dans la consommation
d'énergie 37
II.2.1.1 Etat du module radio 37
II.2.1.2 Accès au médium de transmission
38
II.2.2 Techniques de minimisation de la consommation
d'énergie 40
II.2.2.1 Technique de Duty-Cycling 41
II.2.2.2 Protocoles du niveau MAC 42
II.2.2.3 Techniques orientées données
43
II.3 Connectivité du RCSF 44
II.3.1 Définition 44
II.3.2 Représentation graphique d'un réseau de
capteurs sans fil 44
II.3.3 Problèmes de connectivité et les solutions
dans les RCSF 46
II.3.3.1 Algorithme de détection d'un point d'un point
d'articulation dans un 47
graphe unidirectionne
II.3.3.2 Algorithme d'auto-organisation 48
II.4 Couverture dans les RCSF 49
II.4.1 Définitions 49
II.4.2 K-couverture 50
II.4.3 Problème de la couverture de surface et les
solutions 51
II.4.3.1 Algorithme de ZHONG.G et CHENG.J 52
II.4.3.2 Mise en veille alternative 53

7
II.5 Conclusion 53

III Le routage et la sécurité dans les
RCSF
III.1 Introduction 55
III.2 Le routage dans les RCSF 55
III.2.1 Taxonomie des protocoles de routage
56
III.2.2 Exemples des protocoles de routage dans les RCSF
57
III.2.2.1 SPIN 57
III.2.2.2 Directed Diffusion 59
III.2.2.3 LEACH 63
III.2.2.4 TEEN et APTEEN 63
III.3 La sécurité dans les RCSF
64
III.3.1 Vue globale des problèmes de
sécurité dans les RCSF 64
III.3.2 Attaques sur les protocoles de routage dans les RCSF
65
III.3.2.1 Attaques actives 66
III.3.2.2 Attaques passives 69
III.3.3 Les mécanismes de défense
69
III.3.3.1 La cryptographie 69
III.3.3.2 IDS 74
III.4 Conclusion 75
CoNcLusioN GENERALE 77
BiBLioGRApHiE 78

9
LIsTE DEs FIGUREs
Figure1.1 Les échanges dans les modes
Infrastructures et Ad hoc 17
Figure1.2 Exemple d'un capteur
20
Figure1.3 Architecture générale
d'un capteur 21
Figure1.4 Ensembles des capteurs
22
Figure1.5 Architecture d'un RCSF
23
Figure1.6 Collecter les informations à la
demande 23
Figure1.7 Collecter les informations Suite
à un événement 24
Figure1.8 Les types d'architecture des
RCSF 24
Figure1.9 Architecture plate
25
Figure1.10 Architecture
hiérarchique 26
Figure1.11 La pile protocolaire des RCSF
26
Figure1.12 Classifications des applications des
RCSF 29
Figure1.13 Utilisation des RCSF dans
l'agriculture 29
Figure1.14 Un service militaire utilisant les
RCSF 30
Figure2.1 Modèle de consommation
d'énergie 37
Figure2.2 Consommation d'énergie en
acquisition, traitement, et communication 37
Figure2.3 Diagramme de transition d'état
du modèle du noeud capteur 38
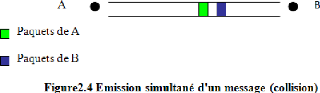
Figure2.4 Emission simultané d'un message
(collision) 39
Figure2.5 La surécoute dans une
transmission 39
Figure2.6 Classifications des techniques de
conservation d'énergie 41
Figure2.7 Porté de la radio des noeuds
46

10
Figure2.8 Topologie avec le point
d'articulation 46
Figure2.9 Les algorithmes proposées aux
problèmes de connectivité 47
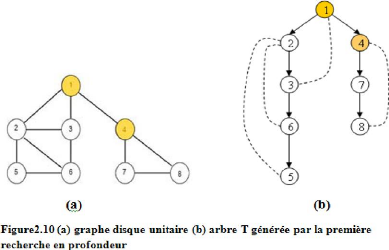
Figure2.10 (a) graphe disque unitaire et
(b) arbre T générée par la
première recherche en 48 profondeur
Figure2.11 Auto-organisation autour du point
d'articulation 49
Figure2.12. (a) couverture d'une région.
(b) couverture de point 50
Figure2.13 points 1,2,3,4-couvert
50
Figure2.14 Représentation graphique de la
couverture 51
Figure2.15 Les algorithmes proposés aux
problèmes de couverture 52
Figure3.1 Classification des protocoles de
routage 56
Figure3.2 Le fonctionnement de SPIN
59
Figure3.3 Propagation des intérêts
et établissement des gradients 60
Figure3.4 Renforcement des chemins
62
Figure3.5 Le Clustering dans un RCSF
63
Figure3.6 Classifications des problèmes
dans les RCSF 64
Figure3.7 Classification des attaques sur les
protocoles de routage dans les RCSF 66
Figure3.8 Attaque de
«jamming>> 67
Figure3.9 Attaque «
sinkhole >> 67
Figure3.10 Attaque
«Wormhole>> 68
Figure3.11 Chiffrement
asymétrique 70
Figure3.12 Chiffrement symétrique
70
Figure3.13 Intégrité des
données 71
Figure3.14 Authentification de l'origine des
données 72
Figure3.15 Signature numérique
73
Figure3.16 Architecture de base pour un
IDS 75
LIsTE DEs TABLEAUx

Tableau1.1 Comparaison entre les RCSF et les
réseaux Ad hoc20
LiSTS DES ABREviATioNS
>

12
RCSF : Réseau de
Capteurs Sans Fil.
> WSN : Wireless Sensor
Networks.
> MAN: Mobile Ad hoc
Network.
> MAC: Méthode
d'Accès au Canal.
> TDMA: Time Division
Multiple Access.
> SPIN: Sensor Protocols
for Information via Negotiation
> ADV: Adversting.
> REQ: Request.
> DD: Directed
Diffusion.
> LEACH: Low Energy
Adaptive Clustering
Hierarchy.
> TEEN: Threshod sensitive
Energy Efficient Network
protocol.
> ATEEN: Adaptive Threshod
sensitive Energy Efficient
Network protocol.
> CAM: Code
d'Authentification de Message.
> IDS : Intrusion Detection
System.
> CHs : Cluster Heads.

Introduction générale
Depuis quelques années, on remarque que de plus en plus
d'applications multimédias sont proposées sur des
périphériques éventuellement nomades (PC, Portable,
Téléphone, PDA). Cependant ces applications ne sont pas capables
de rendre compte de leur environnement proche (localisation, proximité
géographique). Les récentes avancées technologiques dans
le domaine de la micro-éléctronique ont permis la
démocratisation et l'accroissement du développement de capteurs
éventuellement mobiles à l'aide de moyens de communication
sans-fil.Ces capteurs peuvent permettre à ce type d'application de
prendre et rendre compte de leur environnement proche.Ces capteurs forment ce
que n'appellent les réseaux de capteurs sans fil.
Les réseaux de capteurs ont fait naître de
nombreuse problématique de recherche, de par les applications qu'ils
permettent d'entrevoir et les nombreuses contraintes qu'elles supposent. Les
capteurs que nous considérons sont de petits objets
équipés de modules de communication et d'acquisition
d'information, particulièrement contraints en énergie.
Déployés sur une zone sensible à surveiller, ces objets
doivent économiser leur énergie tout en observant correctement
leur environnement.
L'auto configuration de ces réseaux et les
mécanismes à organisation automatique est nécessaire dans
des réseaux de capteurs en raison de la surveillance dans les
environnements incertains et dynamiques. Une certaine attention a
été donnée à se développer localisé,
distribué, mécanismes de auto-configuration des réseaux de
capteurs sont caractérisés par des contraintes graves
d'énergie parce que les noeuds fonctionneront souvent avec les
ressources finies de batterie et la recharge limitée.
Les avancées technologiques récentes confortent
la présence de l'informatique et de l'électronique au coeur du
monde réel. De plus en plus d'objets se voient ainsi équiper de
processeurs et de moyens de communication mobiles leur permettant de traiter
des informations mais également de les transmettre.Cette
évolution s'inscrit dans le cadre de l'information
pervasive, plus connue sous le nom d'ubiquitous
computing. Un des objectifs de ce domaine est de combler le
fossé entre les mondes réel et virtuel en rendant les objets
<<Intelligents>>.Pour cela, ceux-ci doivent être capables de
détecter un changement dans leur environnement et d'y réagir en
fonction notamment des besoins de l'utilisateur.

14
Donc, notre objectif est d'économiser au maximum
l'énergie et d'augmenter la durée de vie du réseau, les
capteurs doivent pouvoir fréquemment alterner entre des modes de veille
et des modes actifs. Une première étude théorique sur les
gains en énergie potentiellement atteignables sera menée.
CHApITRE I

GENERALITE suR LEs
REsEAuX DE cApTEuRs
sANs FIL
|

16
I.1 Introduction
Depuis quelques années, Internet suscite un engouement
croissant, tant dans les domaines de recherche, de l'éducation et celui
des affaires. Ainsi, le nombre de personnes qui accèdent á
Internet pour leurs travaux, leurs études ou leurs loisirs augmente
considérablement, de même que les services offerts sur ce
réseau (messagerie électronique, e-commerce,
elearning, etc.). Cette diversité de services et d'utilisateurs
est principalement due au fait qu'Internet regroupe un grand nombre de
réseaux différents.
De l'autre côté, le progrès
réalisé dans le domaine sans fils a contribué à
l'évolution de l'Internet en facilitant l'accès aux usagers.
L'évolution dans le domaine des communications sans fils et
l'informatique mobile gagne de plus en plus de popularité et les
composants mobiles deviennent de plus en plus fréquents (PDA,
laptops, handsets). Ceci a permis l'apparition d'un nouveau
type de réseaux sans fils appelé réseaux de capteurs sans
fil.
Dans ce chapitre, nous présenterons les réseaux
de capteurs sans fil, leurs architectures de communication, leurs applications.
Nous discuterons également les principaux facteurs et contraintes qui
influencent la conception des réseaux de capteurs sans fil.
I.2 Les réseaux Ad hoc
Les réseaux Ad hoc (en latin : « qui va
vers ce vers quoi il doit aller », c'est-á-dire «
formé dans un but précis », telle qu'une commission
ad hoc, formée pour régler un problème
particulier sont des réseaux sans fil capables de s'organiser sans
infrastructure définie préalablement.
Les réseaux ad hoc, dans leur configuration mobile, sont
connus sous le nom de MANet (pour Mobile Ad hoc NET Works)
[1].
I.2.1 Description détaillée
Chaque entité ((node) noeud)
communique directement avec sa voisine. Pour communiquer avec d'autres
entités, il lui est nécessaire de faire passer ses données
par d'autres qui se chargeront de les acheminer. Pour cela, il est d'abord
primordial que les entités
se situent les unes par rapport aux autres, et soient capables de
construire des routes entre elles : c'est le rôle du protocole de
routage.
Ainsi, le fonctionnement d'un réseau ad hoc le
différencie notablement d'un réseau comme le réseau GSM,
les réseaux Wi-Fi avec des points d'accès : là où
une ou plusieurs stations de base sont nécessaires à la plupart
des communications entre les différents noeuds du réseau
(mode Infrastructure), les réseaux ad hoc s'organisent
d'eux-mêmes et chaque entité peut jouer différents
rôles.

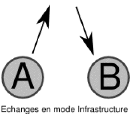

Figure1.1 Les échanges dans les modes
Infrastructure et Ad-hoc [1].
L'utilisation la plus simple et la plus courante des
réseaux ad hoc est faite par les réseaux sans fil Wi-Fi en
permettant une mise en place rapide d'une connexion réseau entre deux
ordinateurs.
I.2.2 Les problèmes de l'ad hoc
Les principaux problèmes des réseaux ad hoc, et les
problématiques à gérer sont [1] :
· Absence d'infrastructure
· Bande passante limitée
· Perte de données
· Perte de routes
· Contraintes de consommation d'énergie
· Sécurité limitée
· Erreur de transmission
· Interférences
· Noeuds cachés


18
? Auto-configuration et détection d'adresses
dupliquées
I.3 Les réseaux des capteurs sans fil
Grâce au progrès fait dans le domaine de la
miniaturisation des systèmes de microélectro-mécanique
(MEMS) et dans le marché des réseaux et des applications sans
fil, s'est créée une nouvelle branche de réseaux mobile
afin d'offrir des solutions économiquement intéressantes pour la
surveillance à distance et le traitement des données dans des
environnements complexes : les réseaux de capteurs sans fil (Wireless
Sensor networks).
Les nouvelles technologies permettent de réduire
l'encombrement, le coüt et la consommation d'énergie et d'augmenter
la précision et les performances des capteurs, des processeurs et des
circuits spécifiques. Un nombre très important de capteurs peut
donc être envisagé, intégré et organisé en
réseau.
Le capteur sans fil a été fabriqué au moyen
d'une première génération de circuits commerciaux
appelés <mote» en raison du système de détection
à distance [2].
Le développement des ces réseaux de capteurs
constitue donc très certainement une prochaine étape dans
l'évolution des technologies de l'information.
I.3.1 Définitions Définition1
Les réseaux de capteurs utilisent un grand nombre de
dispositifs très petits, nommés < noeuds capteurs », pour
former un réseau sans infrastructure établie. Dans ces
réseaux, chaque noeud est capable de détecter son environnement
et de traiter l'information au niveau local ou de l'envoyer à un ou
plusieurs points de collecte, à l'aide d'une connexion sans fil
[3].
Définition2
Un réseau de capteurs sans fil, est un réseau
composé de nombreux petits noeuds indépendants, qui peuvent
s'auto organiser. Les noeuds capteurs sont de taille d'une boite de film de
35mn, se composant d'une batterie, d'une unité radio, d'une unité
de capture et d'une unité de calcul [4].

Définition3
Les réseaux de capteurs sont, par définition,
des systèmes à milliers de noeuds ayant une zone de couverture
extrémement réduite (de l'ordre de 3m), déployés
d'une manière dense dans un environnement
hétérogène. De plus, chaque noeud du réseau dispose
d'une réserve énergétique (ex.pile) ayant une durée
de vie limitée et dont le remplacement peut s'avérer impossible
[4].
I.3.2 Caractéristique des RCSF [5]
Ces réseaux sont caractérisés par :
> Les noeuds capteurs sont limités en puissance de
calcul, les capacités de traitement et en taille de mémoire.
> Consommation électrique faible.
> Faible débit.
> L'absence d'infrastructure Auto configurabilité.
> Topologie dynamique à cause des changements
fréquents (ajout, déplacement, suppression de capteurs à
cause de défaillances ou autre,...) pour cela ils doivent
s'auto-organiser.
> Evolutivité du nombre de capteurs.
> Forte densité de noeuds : Le nombre de capteurs est
bien plus élevé que dans un réseau traditionnel (les
capteurs sont déployés densément).
> Manque de sécurité.

20
I.3.3 Comparaison entre les RCSF et les réseaux Ad
hoc
Le tableau 1.1 présente une comparaison entre les
réseaux de capteurs et les réseaux ad hoc [6]
:
|
Capteurs
|
Ad hoc
|
|
1. Objectif ciblé
|
1. Générique/ communication
|
|
2. Les noeuds collaborent pour remplir un objectif
|
2. Chaque noeud a son propre objectif
|
3. Flot de données «many-to-one»
|
|
3. Flot «Any-to-many»
|
|
|
4. Energie est un facteur déterminant
|
4. Débit est un majeur
|
|
5. Utilisation du broadcast
|
5. Communication point á point
|
Tableau1.1 Comparaison entre les RCSF et les
réseaux Ad hoc.
I.3.4 Architecture d'un capteur
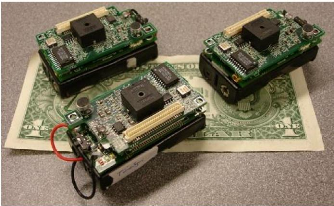
Figure1.2 ( [ H' SUeTOIKnTRSIIKILI

1.3.4.1 Modèle d'un capteur [7]
Les capteurs que l'on trouve actuellement sur le marché
sont composés en règle générale de la façon
suivante (Fig. 1.3) : un noyau central auquel viennent se greffer
différents composants. Un capteur (Mote) est composé d'un
processeur, une mémoire pour les données et une mémoire
système (RAM et Flash), d'une radio dotée d'une antenne, d'une
batterie et de détecteurs (capteur) dotés d'une diode
électroluminescente (LED) et d'une interface [Wiki, 2006].
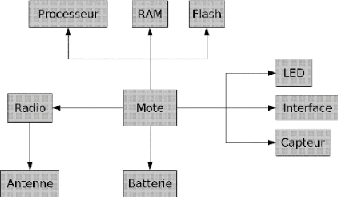
Figure1.3 Architecture générale d'un
capteur
1.3.4.2 Description [7]
L1
· Mote, processeur, RAM et Flash
: On appelle généralement Mote la carte physique
utilisant le système d'exploitation pour fonctionner. Celle-ci a pour
coeur le bloc constitué du processeur et des mémoires RAM et
Flash. Get ensemble est à la base du calcul binaire et du stockage,
temporaire pour les données et définitif pour le système
d'exploitation.
? Radio et Antenne : Un capteur est
conçu pour mettre en place des réseaux sans fils, les
équipements étudiés sont donc généralement
équipés d'une radio ainsi que d'une antenne afin de se connecter
à la couche physique que constitue les émissions hertziennes.
L1
· LED, Interface, capteur :
Prévus pour mettre en place des réseaux de capteurs, on
retrouve donc des équipements bardés de différents types
de détectrices et autres entrées.


22
?? Batterie : Comme tout dispositif
embarqué, ils disposent d'une alimentation autonome telle qu'une
batterie, et parfois d'un panneau solaire pour permettre de recharger cette
batterie, ce qui lui permet d'être disposé dans un endroit parfois
inaccessible.
Cependant quelques différences existent suivants les
fabricants, chacun d'eux développe son type de capteurs, ces types
peuvent être mica, mica2, ou telosb par
exemple.
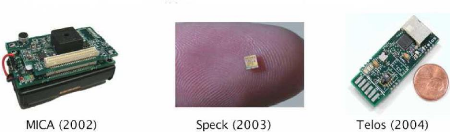
Figure14 Ensembles des capteurs.
I.35 Architecture des RCSF
Les noeuds de ce type des réseaux consistent en un
grand nombre de micro-capteurs capables de récolter et de transmettre
des données environnementales d'une manière autonome. La position
de ces noeuds n'est pas obligatoirement prédéterminée. Ils
sont dispersés aléatoirement à travers une zone
géographique, appelée champ de captage, qui définit le
terrain d'intérêt pour le phénomène capté.
Les données captées sont acheminées grâce à
un routage multi-saut à un noeud considéré comme « un
point de collecte », appelé noeud puits (ou sink). Ce dernier peut
être connecté à l'utilisateur du réseau via Internet
ou un satellite. Ainsi, l'usager peut adresser des requêtes aux autres
noeuds du réseau, précisant le type de données requises et
récolter les données environnementales captées par le
biais du noeud puits [8].
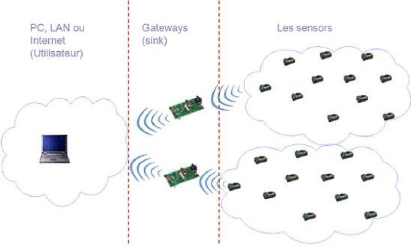

Figure1.1 $ U4 uT &6) . [9]
Collecter les informations
Il y a deux méthodes pour collecter les informations d'un
réseau de capteurs.
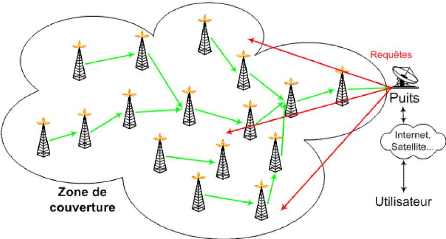
Figure1.6 Collecter les informations à la
demande. [10]

24
Lorsque l'on souhaite avoir l'état de la zone de
couverture à un moment T, le puits émet des brodcasts vers toute
la zone pour que les capteurs remontent leur dernier relevé vers le
puits. Les informations sont alors acheminées par le biais d'une
communication multi-sauts.
Suite à un événement
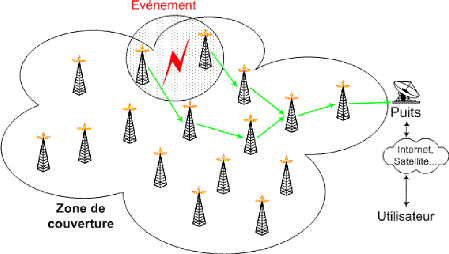
Figure1.7 Collecter les informations Suite à un
événement. [10]
Un événement se produit en un point de la zone
de couverture (changement brusque de température, mouvement...), les
capteurs situés à proximité remontent alors les
informations relevées et les acheminent jusqu'au puits.
Il existe deux types d'architectures pour les réseaux de
capteurs sans fil
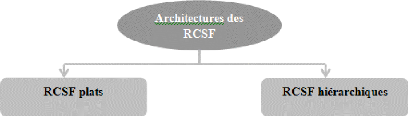
Figure1.8 Les types d'architecture des RCSF

I.3.5.1 Les réseaux de capteurs sans fil plats
:
Un réseau de capteurs sans fil plat est un
réseau homogène, ou tous les noeuds sont identiques en termes de
batterie et de complexité du matériel, excepté le Sink qui
joue le rôle d'une passerelle et qui est responsable de la transmission
de l'information collectée à l'utilisateur final. Selon le
service et le type de capteurs, une densité de capteurs
élevée (plusieurs noeuds capteurs/m2) ainsi qu'une communication
multi-saut peut être nécessaire pour l'architecture plate. En
présence d'un très grand nombre de noeuds capteurs, la
scalabilité devient critique. Le routage et le contrôle
d'accès au médium (MAC) doivent gérer et organiser les
noeuds d'une manière très efficace en termes d'énergie.

Figure1.9 Architecture plate [11]
I.3.5.2 Les réseaux de capteurs
hiérarchiques :
Une architecture hiérarchique était
proposée pour réduire le coût et la complexité de la
plus part des noeuds capteurs en introduisant un ensemble de noeuds capteurs
plus coüteux et plus puissant, ceci en créant une infrastructure
qui décharge la majorité des noeuds simples a faible coüt de
plusieurs fonctions du réseau. L'architecture hiérarchique est
composée de multiples couches : une couche de capteurs, une couche de
transmission et une couche de point d'accès.


26
Figure1.10 Architecture hiérarchique
[11]
I.4. Pile protocolaire
Le rôle de ce modèle consiste à
standardiser la communication entre les composants du réseau afin que
différents constructeurs puissent mettre au point des produits
(logiciels ou matériels) compatibles. Ce modèle comprend 5
couches qui ont les mêmes fonctions que celles du modèle OSI ainsi
que 3 couches pour la gestion de la puissance d'énergie, la gestion de
la mobilité ainsi que la gestion des tâches (interrogation du
réseau de capteurs). Le but d'un système en couches est de
séparer le problème en différentes parties (les couches)
selon leur niveau d'abstraction. Chaque couche du modèle communique avec
une couche adjacente (celle du dessus ou celle du dessous). Chaque couche
utilise ainsi les services des couches inférieures et en fournit
à celle de niveau supérieur [9].
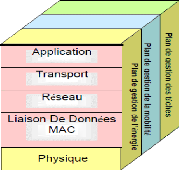
Figure1.11 La pile protocolaire des RCSF
[9]

I.4.1 Rôle des couches [9]
> La couche physique :
Spécifications des caractéristiques matérielles, des
fréquences porteuses, etc.
> La couche liaison : Spécifie
comment les données sont expédiées entre deux
noeuds/routeurs dans une distance d'un saut. Elle est responsable du
multiplexage des données, du contrôle d'erreurs, de l'accès
au media,... Elle assure la liaison point à point et multi-point dans un
réseau de communication.
> La couche réseau : Dans la couche
réseau le but principal est de trouver une route et une transmission
fiable des données, captées, des noeuds capteurs vers le puits
"sink" en optimisant l'utilisation de l'énergie des capteurs. Ce routage
diffère de celui des réseaux de transmission ad hoc sans fils par
les caractéristiques suivantes:
· il n'est pas possible d'établir un système
d'adressage global pour le grand nombre de noeuds.
· les applications des réseaux de capteurs exigent
l'écoulement des données mesurées de sources multiples
à un puits particulier.
· les multiples capteurs peuvent produire de mêmes
données à proximité d'un phénomène
(redondance).
· les noeuds capteur exigent ainsi une gestion soigneuse
des ressources. En raison de ces différences, plusieurs nouveaux
algorithmes ont été proposés pour le problème de
routage dans les réseaux de capteurs.
> La couche transport : Cette couche est
chargée du transport des données, de leur découpage en
paquets, du contrôle de flux, de la conservation de l'ordre des paquets
et de la gestion des éventuelles erreurs de transmission.
> La couche application : Cette couche
assure l'interface avec les applications.
Il s'agit donc du niveau le plus proche des utilisateurs,
géré directement par les logiciels.
I.4.2 Plans de gestion [9]
Les plans de gestion d'énergie, de mobilité et
de tâche contrôlent l'énergie, le mouvement et la
distribution de tâche au sein d'un noeud capteur. Ces plans aident les
noeuds capteurs à coordonner la tâche de captage et minimiser la
consommation d'énergie. Ils sont donc nécessaires pour que les
noeuds capteurs puissent collaborer ensemble, acheminer les

28
données dans un réseau mobile et partager les
ressources entre eux en utilisant efficacement l'énergie disponible.
Ainsi, le réseau peut prolonger sa durée de vie.
> Plan de gestion d'énergie :
contrôle l'utilisation de la batterie. Par exemple, après
la réception d'un message, le capteur éteint son récepteur
afin d'éviter la duplication des messages déjà
reçus. En outre, si le niveau d'énergie devient bas, le noeud
diffuse à ses voisins une alerte les informant qu'il ne peut pas
participer au routage. L'énergie restante est réservée au
captage.
> Plan de gestion de mobiité :
détecte et enregistre le mouvement du noeud capteur. Ainsi, un
retour arrière vers l'utilisateur est toujours maintenu et le noeud peut
garder trace de ses noeuds voisins. En déterminant leurs voisins, les
noeuds capteurs peuvent balancer l'utilisation de leur énergie et la
réalisation de tâche.
> Plan de gestion de tâche : balance
et ordonnance les différentes tâches de captage de données
dans une région spécifique. Il n'est pas nécessaire que
tous les noeuds de cette région effectuent la tâche de captage au
même temps ; certains noeuds exécutent cette tâche plus que
d'autres selon leur niveau de batterie.
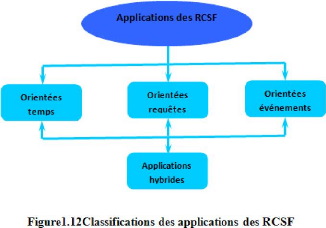
I.5. Applications des RCSF
Les réseaux de capteurs sans fil ont été
classés parmi les 21 technologies les plus importantes du 21éme
siècle [12]. En effet, la recherche dans le domaine des
capteurs est en train de vivre une révolution importante, ouvrant des
perspectives d'impacts significatifs dans de nombreux domaines. Ainsi, nous
classifions les applications des RCSF en quatre classes d'applications :
orientées temps (time driven), orientées
événements (event driven), orientées
requêtes (query driven) et hybride [13].

I.5.1 Applications orientées temps
Cette classe représente les applications où
l'acquisition et la transmission des données capturées sont
liées au temps : instant précis, période d'acquisition.
Cette période d'acquisition peut être plus au moins longue selon
l'application (de quelques secondes jusqu'à quelques heures voire des
jours). Ainsi, la quantité de données échangée dans
le réseau dépend de la périodicité des mesures
à effectuer sur l'environnement local. La collecte de données
environnementales peut représenter un bon exemple de cette classe
d'application dans des domaines variés : agriculture,
expérimentation scientifique, etc. [14].

Figure1.13 Utilisation des RCSF dans
l'agriculture.

30
I.5.2 Applications orientées
événements
Dans ce cas, les capteurs envoient leurs données
seulement si un événement spécifique se produit. On peut
citer l'exemple de surveillance des feux dans les forets où un capteur
envoi des alarmes à la station de base dés que la
température dépasse un certain seuil. Au départ, cette
classe d'application était conçue à des fins militaires,
comme la surveillance du déplacement d'objets dans le champ de bataille.
Par la suite, cette classe a rapidement trouvé, de nouvelles
perspectives comme le contrôle industriel, le contrôle
médical des patients, la surveillance d'édifices (barrages,
ponts, voies de chemins de fer, etc.) [15].

Figure 1.14 Un service militaire utilisant les
RCSF
I.5.3 Applications orientées requêtes
Dans ce cas, un capteur envoi de l'information uniquement
suite à une demande explicite de la station de base. Cette classe
d'application est destinée aux applications adaptées à
l'utilisateur. Ce dernier peut requérir des informations à partir
de certaines régions dans le réseau ou interroger les capteurs
pour acquérir des mesures d'intérêts. Dans ce cas, des
connaissances sur la topologie du réseau et l'emplacement des capteurs
sont nécessaires [14].
I.5.4 Applications hybrides
Ce type d'application met en oeuvre les trois modes de
fonctionnement décrits précédemment. Par exemple, dans un
réseau conçu pour le suivi d'objets, le réseau peut
combiner entre un réseau de surveillance (time driven) et un
réseau de collecte de données par événements
(event driven). Par exemple, pendant les longues périodes
d'inactivité des

capteurs et lorsque aucun objet n'est présent, le
réseau peut assurer une fonction de surveillance
[14].
I.6. Facteurs et contraintes des RCSF [14].
La conception et la réalisation des réseaux de
capteurs sans fil sont influencées par plusieurs paramètres. Ces
facteurs servent comme directives pour le développement des algorithmes
et protocoles utilisés dans les RCSF.
I.6.1 Durée de vie du réseau
C'est l'intervalle de temps qui sépare l'instant de
déploiement du réseau de l'instant où l'énergie du
premier noeud s'épuise. Selon l'application, la durée de vie
exigée pour un réseau peut varier entre quelques heures et
plusieurs années.
I.6.2 Ressources limitées
En plus de l'énergie, les noeuds capteurs ont aussi
une capacité de traitement et de mémoire limitée. En
effet, les industriels veulent mettre en oeuvre des capteurs simples, petits et
peu coûteux qui peuvent être achetés en masse.
I.6.3 Bande passante limitée
Afin de minimiser l'énergie consommée lors de
transfert de données entre les noeuds, les capteurs opèrent
à bas débit. Typiquement, le débit utilisé est de
quelques dizaines de Kb/s. Un débit de transmission réduit n'est
pas handicapant pour un réseau de capteurs où les
fréquences de transmission ne sont pas importantes.
I.6.4 Facteur d'échelle
Le nombre de noeuds déployés pour une application
peut atteindre des milliers. Dans ce cas, le réseau doit fonctionner
avec des densités de capteurs très grandes. Un nombre aussi

32
important de noeuds engendre beaucoup de transmissions inter
nodales et nécessite que la station de base soit équipée
de mémoire suffisante pour stocker les informations reçues
[16].
I.6.5 Topologie dynamique
La topologie des réseaux de capteurs peut changer au
cours du temps pour les raisons suivantes :
· Les noeuds capteurs peuvent être
déployés dans des environnements hostiles (champ de batail par
exemple), la défaillance d'un noeud capteur est, donc très
probable.
· Un noeud capteur peut devenir non opérationnel
à cause de l'expiration de son énergie.
· Dans certaines applications, les noeuds capteurs et les
stations de base sont mobiles.
I.6.6 Agrégation de donnée
Dans les réseaux de capteurs, les données
produites par les noeuds capteurs voisins sont très
corrélées spatialement et temporellement. Ceci peut engendrer la
réception par la station de base d'informations redondantes.
Réduire la quantité d'informations redondantes transmises par les
capteurs permet de réduire la consommation d'énergie dans le
réseau et ainsi d'améliorer sa durée de vie. L'une des
techniques utilisée pour réduire la transmission d'informations
redondantes est l'agrégation des données. Avec cette technique,
les noeuds intermédiaires agrégeant l'information reçue de
plusieurs sources. Cette technique est connue aussi sous le nom de fusion de
données.
I.7 Conclusion
Les réseaux de capteurs sans fil présentent un
intérêt considérable et une nouvelle étape dans
l'évolution des technologies de l'information et de la communication.
Cette nouvelle technologie suscite un intérêt croissant vu la
diversité de ces applications : santé, environnement, industrie
et même dans le domaine sportif.

Dans ce premier chapitre, nous avons présenté
les réseaux de capteurs sans fil, leurs architectures de communication,
la pile protocolaire des capteurs et leurs diverses applications. Cependant,
nous avons remarqué que plusieurs facteurs et contraintes compliquent la
gestion de ce type de réseaux. En effet, les réseaux de capteurs
se caractérisent par une capacité énergétique
limitée rendant l'optimisation de la consommation d'énergie dans
des réseaux pareils une tâche critique pour prolonger la
durée de vie du réseau.
CHApITRE II

34
L'ÉcoNoMiE D'ÉNERGiE,
LA CouvERTuRE ET LA
CoNNECTIvITÉ DANS LES
RCSF

II.1 Introduction
Les capteurs sont conçus pour fonctionner durant des
mois voire des années. Ainsi, la capacité
énergétique des capteurs doit titre utilisée efficacement
afin de maximiser la durée de vie du réseau. A noter qu'une fois
qu'un noeud capteur a épuisé son énergie, il est
considéré comme défaillant. Ainsi, il y a une forte
probabilité de perdre la connectivité du réseau.
Dans ce chapitre, nous décrirons la
problématique de la consommation d'énergie, ainsi les
problèmes concernent la couverture et la connectivité dans les
réseaux de capteurs. Nous présenterons aussi les principales
solutions proposées dans la littérature pour ces
problèmes
II.2 Consommation d'énergie dans les RCSF
L'énergie consommée par un noeud capteur est due
essentiellement aux opérations suivantes : la capture, le traitement et
la communication de données [17].
Energie de capture
L'énergie de capture est dissipée pour accomplir
les tâches suivantes : échantillonnage, conversion
analogique/numérique et activation de la sonde du capture. En
général, l'énergie de capture représente un faible
pourcentage de l'énergie totale consommé par un noeud.
Energie de traitement
L'énergie de traitement se divise en deux parties :
l'énergie de commutation et l'énergie de fuite. L'énergie
de commutation est déterminée par la tension d'alimentation et la
capacité totale commutée au niveau logiciel (en exécutant
un logiciel).
Par contre l'énergie de fuite correspond à
l'énergie consommée lorsque l'unité de calcul n'effectue
aucun traitement. En général, l'énergie de traitement est
faible par rapport à celle nécessaire pour la communication.

36
Energie de communication
L'énergie de communication se décline en deux
parties :
L'énergie de réception et l'énergie de
l'émission. Cette énergie est déterminée par la
quantité des données à communiquer et la distance de
transmission, ainsi que par les propriétés physiques du module
radio. L'émission d'un signal est caractérisée par sa
puissance.
Quand la puissance d'émission est élevée,
le signal aura une grande portée et l'énergie consommée
sera plus élevée. Notons que l'énergie de communication
représente la portion la plus grande de l'énergie
consommée par un noeud capteur.
Modèle de consommation
d'énergie
Heinzelman et al [17] proposent un
modèle radio de consommation d'énergie (voir figure). Ainsi, les
énergies nécessaires pour émettre ETx(s,d) et
recevoir ERx(s) des messages sont données par :
. Pour émettre un message de s bits vers un
récepteur loin de d mètres, l'émetteur
consomme:
ETx(s, d) = ETx elec(s) + ETx amp(s, d)
ETx(s, d) =
(Eelec * s) + ( Eamp * s *d2 )
. Pour recevoir un message de s bit, le récepteur
consomme :
ERx(s) = ERx elec(s)
ERx(s) = Eelec * s
Eelec et Eamp représentent respectivement l'énergie
de transmission électronique et d'amplification (voire figure 2.1).
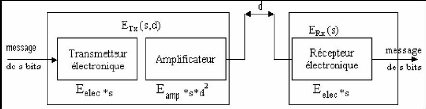

Figure2.1 Modèle de consommation
d'énergie.
L'histogramme présenté par la figure 1.23, illustre
la consommation de l'énergie par les différentes unités
d'un noeud capteur.
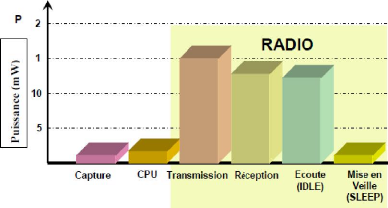
Figure2.2 Consommation d'énergie en acquisition,
traitement, et communication. [8]
II.2.1 Facteurs intervenants dans la consommation
d'énergie II.2.1.1 Etat du module radio
Le module radio est le composant du noeud capteur qui consomme
le plus d'énergie, puisque c'est lui qui assure la communication entre
les noeuds. On distingue quatre états des composants radio (transmetteur
et récepteur) : actif, réception, transmission et sommeil
[18]:
? ?Etat actif (run) : la radio est
allumée, mais elle n'est pas employée. En d'autres
termes, le noeud capteur n'est ni en train de recevoir ni de
transmettre. Cet état
provoque une perte de l'énergie suite à
l'écoute inutile du canal de transmission.

38
Pour éviter cette perte d'énergie, un capteur doit
s'activer qu'en cas de nécessitée, et le reste du temps il doit
se mettre dans l'état sommeil.
n Etat sommeil : la radio est mise hors
tension.
n Etat transmission : la radio transmet un
paquet.
n Etat réception : la radio
reçoit un paquet.
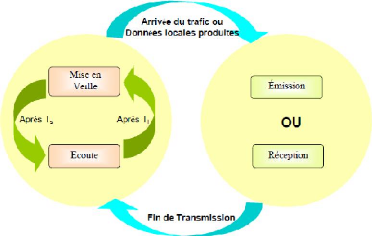
Figure2.3 Diagramme de transition d'état du mod~le
du noeud capteur [7]
Il est aussi à noter que le passage fréquent de
l'état actif à l'état sommeil peut avoir comme
conséquence une consommation d'énergie plus importante que de
laisser le module radio en mode actif. Ceci est dû á la puissance
nécessaire pour la mise sous tension du module radio. Cette
énergie est appelée l'énergie de transition. Il est ainsi
souhaitable d'arrêter complètement la radio plutôt que de
transiter dans le mode sommeil.
II.2.1.2 Accès au medium de transmission
La sous couche MAC assure l'accès au support de
transmission, la fiabilité de transmission, le contrôle de flux,
la détection d'erreur et la retransmission des paquets.
Puisque les noeuds partagent le même médium de
transmission, la sous-couche MAC joue un rôle important pour la
coordination entre les noeuds et la minimisation de la consommation
d'énergie. En effet, minimiser les collisions entre les noeuds permet de
réduire la perte d'énergie. [13]

· La retransmission
Les noeuds capteurs possèdent en général
une seule antenne radio et partagent le méme canal de transmission. Par
ailleurs, la transmission simultanée des données provenant de
plusieurs capteurs peut produire des collisions et ainsi une perte de
l'information transmise.
La retransmission des paquets perdus peut engendrer une perte
significative de l'énergie.
· L'écoute active
L'écoute active (idle listening) du canal
pour une éventuelle réception de paquet qui ne sera pas
reçu peut engendrer une perte importante de la capacité des
noeuds en énergie. Pour éviter ce problème, il faut
basculer les noeuds dans le mode sommeil le plus longtemps possible.
· La surécoute
Le phénomène de surécoute
(overhearing) se produit quand un noeud reçoit des paquets qui
ne lui sont pas destinés (voir figure 2.5). La surecoute conduit
à une perte d'énergie additionnelle à cause de
l'implication des autres capteurs dans la réception des
données.
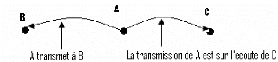
Figure2.5 La surécoute dans une transmission
[14].

40
? La surcharge
Plusieurs protocoles de la couche MAC fonctionnent par
échange de messages de contrôle (overhead) pour assurer
différentes fonctionnalités : signalisation, connectivité,
établissement de plan d'accès et évitement de collisions.
Tous ces messages nécessitent une énergie additionnelle.
? La surémission
Le phénomène de surémission
(overemitting) se produit quand un noeud capteur envoie les
données à un destinataire qui n'est pas prêt à les
recevoir. En effet, les messages envoyés sont considérés
inutiles et consomment une énergie additionnelle
? La taille des paquets
La taille des messages échangés dans le
réseau a un effet sur la consommation d'énergie des noeuds
émetteurs et récepteurs. Ainsi, la taille des paquets ne doit
être ni trop élevée ni trop faible. En effet, si elle est
petite, le nombre de paquets de contrôle (acquittement)
généré augmente l'overhead.
Dans le cas contraire, une grande puissance de transmission est
nécessaire pour des paquets de grande taille [14].
II.2.2 Techniques de minimisation de la consommation
d'énergie
Des mesures expérimentales ont montré que,
généralement, c'est la transmission des données qui est la
plus consommatrice en énergie, et de façon significative, les
calculs, eux, consomment très peu [19]. La consommation
d'énergie du module de détection dépend de la
spécificité du capteur. Dans de nombreux cas, elle est
négligeable par rapport à l'énergie consommée par
le module de traitement et, par dessus tout, le module de communication.
Le graphe suivant classifie quelques techniques de minimisation
de la consommation d'énergie.
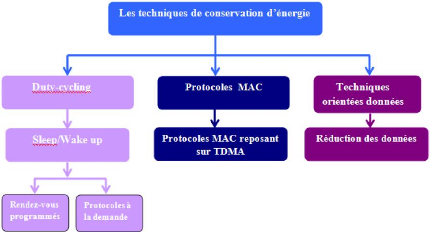
Figure2.6 Classifications des techniques de conservation
d'énergie

Cette technique est principalement utilisée dans
l'activité réseau. Le moyen le plus efficace pour conserver
l'énergie est de mettre la radio de l'émetteur en mode veille
(low-power) à chaque fois que la communication n'est pas
nécessaire. Idéalement, la radio doit être éteinte
dès qu'il n'y a plus de données à envoyer et ou à
recevoir, et devrait être prête dès qu'un nouveau paquet de
données doit etre envoyé ou reçu. Ainsi, les noeuds
alternent entre périodes actives et sommeil en fonction de
l'activité du réseau. Ce comportement est
généralement dénommé Duty-cycling. Un Duty-cycle
est défini comme étant la fraction de temps où les noeuds
sont actifs ITE].
1717171=S1=171 EEM
Comme mentionné précédemment, un
régime sleep/wakeup peut être défini pour un composant
donné (i.e. le module Radio) du noeud capteur.
Les protocoles sleep/wakeup sont divisés en deux grandes
catégories : à la demande, rendez-vous programmés.

42
· Les protocoles à la demande utilisent
l'approche la plus intuitive pour la gestion d'énergie. L'idée de
base est qu'un noeud devrait se réveiller seulement quand un autre noeud
veut communiquer avec lui. Le problème principal associé aux
régimes à la demande est de savoir comment informer un noeud en
sommeil qu'un autre noeud est disposé à communiquer avec lui.
À cet effet, ces systèmes utilisent généralement
plusieurs radios avec différents compromis entre énergie et
performances (i.e. un radio à faible débit et à faible
consommation pour la signalisation, et un radio à haut débit mais
à plus forte consommation pour la communication de données). Le
protocole STEM (Sparse Topology and Energy Management) [21]
par exemple utilise deux radios.
· Une autre solution consiste à utiliser une
approche de rendez-vous programmés. L'idée est que chaque noeud
doit se réveiller en méme temps que ses voisins. Typiquement, les
noeuds se réveillent suivant un ordonnancement de réveil et
restent actifs pendant un court intervalle de temps pour communiquer avec leurs
voisins. Ensuite, ils se rendorment jusqu'au prochain rendez-vous.
II.2.2.2 Protocoles du niveau MAC [20]
Plusieurs protocoles MAC pour les réseaux de capteurs
sans fil ont été proposés, Nous nous concentrons
principalement sur les questions de gestion d'énergie. La plupart
d'entre eux mettent en oeuvre un régime avec un faible duty-cycle pour
gérer la consommation d'énergie.
Protocoles MAC reposant sur TDMA
Dans les protocoles MAC fondés sur la méthode
TDMA (Time Division Multiple Access) le temps est divisé en trames
(périodiques) et chaque trame se compose d'un certain nombre de slots de
temps. A chaque noeud est attribué un ou plusieurs slots par trame,
selon un certain algorithme d'ordonnancement. Il utilise ces slots pour
l'émission/réception de paquets de/vers d'autres noeuds. Dans de
nombreux cas, les noeuds sont regroupés pour former des clusters avec un
clusterhead qui est chargé d'attribuer les slots de temps pour les
noeuds de son cluster (par exemple: Bluetooth, LEACH.)
[20].
Les protocoles TDMA sont par nature efficaces en
énergie, puisque les noeuds n'allument leur radio que lors de leurs
propres slots et s'endorment le reste du temps.

Toutefois, dans la pratique, les protocoles TDMA ont plusieurs
inconvénients qui compensent les avantages en terme d'économie
d'énergie. .
En effet, dans un véritable réseau de capteurs,
les changements de topologie sont fréquents (conditions variables du
canal, défaillances de noeuds, . . .) et la répartition des slots
peut être problématique donc dans de nombreux cas une approche
centralisée peut être adoptée (LEACH).
II.2.2.3 Techniques orientées
données
Généralement, les plans Duty-cycling ne
tiennent pas compte des données prélevées par les noeuds.
Par conséquent, des approches orientées données peuvent
être utiles pour améliorer l'efficacité en énergie.
En fait, la détection (ou prélèvement de données)
affecte la consommation d'énergie de deux manières [20]
:


Des échantillons inutiles : les
données échantillonnées ont souvent de fortes
corrélations spatiales et/ou temporelle [22], il est
donc inutile de communiquer les informations redondantes à la Station de
Base. Un échantillonnage inutile implique une consommation
d'énergie à son tour inutile. En effet, même si le
coût de l'échantillonnage est négligeable, cela induit
aussi des communications tout le long du chemin qu'emprunte le message.
La consommation électrique du module de
détection : réduire la communication ne suffit pas
lorsque le capteur est lui-même très consommateur.
Réduction des données [20]
Réduire les données en terme de volume ou de
nombre de paquets, dans le réseau peut avoir un impact majeur sur la
consommation d'énergie due à la communication. Parmi les
méthodes de réductions de données, nous trouvons le
In-network processing qui consiste à réaliser de
l'agrégation de données (par exemple, calculer la moyenne de
certaines valeurs) au niveau des noeuds intermédiaires entre la source
et le Sink. Ainsi, la quantité de données est réduite tout
en parcourant le réseau vers le Sink. Une agrégation de
données appropriée est spécifique à
l'application.
La compression de données peut être
appliquée également pour réduire la quantité
d'informations transmises par les noeuds sources. Ce régime implique
l'encodage

44
d'informations au niveau des noeuds qui engendrent des
données, et le décodage au niveau du Sink.
II.3 Connectivité du RCSF
La connectivité est un problème majeur dans les
réseaux de capteurs (composés d'entités fixes ou
mobiles).
II.3.1 Définition
Un réseau de capteur est dit connecté si et
seulement s'il existe au moins une route entre chaque paire de noeud
[23].
La connectivité dépend essentiellement de
l'existence des routes. Elle est affecté par les changements de
topologie dus à la mobilité, la défaillance des noeuds,
les attaques, etc....
Ce qui a pour conséquence : la perte des liens de
communication, l'isolement des noeuds, le partitionnement du
réseau,...etc.
Bien comprendre la connectivité d'un réseau permet
d'adapter les mécanismes de communication afin d'assurer le bon
fonctionnement des applications.
Ainsi, la découverte du voisinage d'un noeud capteur
est un élément important. Dans leur activité
périodique, les pertes de connectivité sont principalement dues
à la mobilité des noeuds et aussi aux mécanismes
liés à l'économie d'énergie.
La densité élevée des noeuds dans les
réseaux de capteur les empêche d'être complètement
isolés les uns des autres. Par conséquent, il est exigent que les
noeuds de capteurs soient fortement connectés.
On peut considérer un réseau de capteurs sans fil
de communication à saut multiple, où tous les noeuds
coopèrent dans le but d'assurer des communications entre chacun.
II.3.2 Représentation graphique d'un réseau
de capteurs sans fil
Un réseau de capteurs sans fil peut être
représenté de la manière suivante :
Soit un graphe G = (V, E) représentant le RCSF, avec V
l'ensemble des noeuds et E est inclus à
V2 les arcs donnant les communications directes
possibles : (u, v) appartient à E si
et seulement si u peut envoyer directement un message à
v (on dit alors que v est voisin de
u).

Les couples appartenant à E
dépendent de la position des noeuds et de leur porté de
communication. Nous prenons l'hypothèse que la portée R
de chaque noeud est identique. Soit d (u, v) la
distance entre les noeuds u et v. l'ensemble
E peut être défini comme suit [24]
:
E = {(u, v) appartient à V2dist (u,
v) =R}.
Ce graphe est connu sous le nom de graphe disque unitaire
[25], avec R comme rayon de transmission.
Dans ce graphe, G = (V, E) nous définissons n=
| V | comme le nombre de noeuds dans le réseau. Le voisinage
N(u) d'un noeud u représente
l'ensemble des noeuds voisins de u, défini par
{v(u,v) E}.
Un graphe G est dit a k-(arc) connectés s'il y a au
moins k disjoint chemins entre deux noeuds quelconque, v
appartient V. la connectivité est une mesure de
tolérance aux fautes ou de diversité de chemins dans le
réseau.la 1- connectivité
est une condition fondamentale pour que le réseau soit
opérationnel. En effet la connectivité d'un réseau
s'exprime de la façon suivante [26] :
Où :
· R est le rayon de transmission d'un
noeud.
· N le nombre de noeuds situé dans
l'aire A.
· A l'aire de calcul.
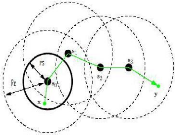
Exemple [4]
Modélisation de la connectivité dans un
réseau de capteurs sans fil.
· Soit un déploiement de N capteurs,
uniformément distribués dans une zone de taille S.
· Deux noeuds capteurs n1 et n2 de coordonnées
respectives (x1,y1) et (x2 ,y2), seraient
reliés si et seulement si d(n1,n2)=R d, étant la
distance euclidienne, elle est définie par la formule suivante
[20] :
d(n1,n2) =((x1 #177;x2 )2 +(y1 #177;y2
)2)1/2

46
Figure2.7 Porté de la radio des noeuds
II.3.3 Problèmes de connectivité et les
solutions dans les RCSF
A cause de déploiement aléatoire des noeuds, il
existe des noeuds critiques influents sur la connectivité du
réseau lorsqu'elles tombent en panne, par conséquent
impossibilité de trouver une route entre une source et une
destination.
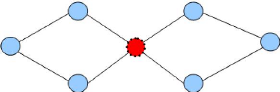
Figure2.8 Topologie avec le point d'articulation
[27]
Le graphe suivant simplifie deux algorithmes :
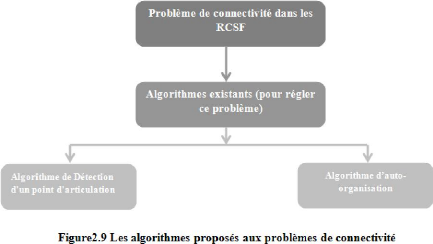

47
II.3.3.1 Algorithme de Détection d'un point
d'articulation dans un graphe unidirectionnel [27]
Données : G (V, E).
Résultat : Ensemble de
points d'articulation
n parcourir le graphe G afin de générer arbre
T, (les arcs de retour sont représentés par lignes
pointées).
n un noeud x n'est pas un point d'articulation si ce
dernier n'admet un successeur, ou si chaque successeur admet un descendant qui
admet arc de retour vers un prdcesseur de x dans l'arbre.
n cas particulier la racine est un point d'articulation si
ce dernier admet plus d'un successeur dans l'arbre.
II.3.3.2 $ 0I41%1CP 1109u%I-organisation [27]

Données : G(V,E), avec
l'ensemble des points d'articulations prcdemment dtectes
Résultat : G(V, E), avec un
ensembles des points d'articulations r~duits, G devient au moins
biconnectée
Pour tout point d'articulation
(AP) faire
n si le point d'articulation AP
admet un voisin redondant Alors le tourner et aller vers AP
(pas 1).
n sinon rechercher des voisins de AP à un
saut.
o si les voisins ont des noeuds redondants, sPlectionner au
moins un noeud avec
la plus grande capacité d'énergie et le
déplacer vers les coordonnés (x, y) de
AP ou augmenter sa porté de radio (communication)
Aller à (pas 1). o sinon
«pas de solution pour AP»; aller pas 1.
Fin pour

49
Get algorithme est appliquée afin d'auto-organise le
réseau et augmente la connectivité autour du point
d'articulation.
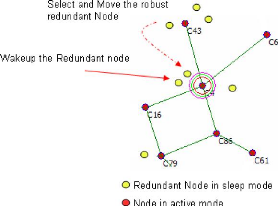
Figure2.11 Auto-organisation autour du point
d'articulation
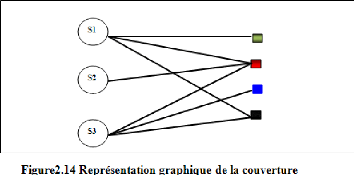
II.4 Couverture dans les RCSF
II.4.1 Définitions
1. Couverture : c'est la surface totale se
trouvant en dessous de la porté de capture des données au moins
d'un noeud [28].
2. Couverture d'un point : on dit qu'un capteur
Si couvre un point q si et seulement si la distance d(q, si ) =
ri.
3. Couverture d'une région : on dit
qu'un capteur Si couvre une région A si et seulement si pour chaque
point q dans A , la distance d(q, si ) = ri [29].
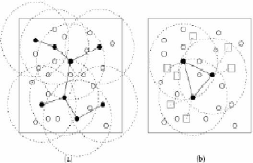

Figure2.12. (a) couverture d'une région. (b)
couverture de point [8].
II.4.2 K-couverture Définition
Soit un réseau de capteurs constitue de n capteurs et une
région d'intérêt A, On dit qu'on a une K-couverture si et
seulement si les deux conditions suivantes sont vérifies [30,31]
:
· Satisfaction des conditions de couverture pour un maximum
de temps de la vie du réseau.
· Chaque point q dans A est couvert par au moins k
distinctes capteur.
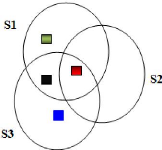
Figure2.13 points 1,2,3,4-couvert.


51
Remarque :
On remarque que le noeud rouge est couvert par les trois S.
Alors on dit que le noeud rouge est bien couvert par apport aux autres
noeuds.
II.4.3 Problème de la couverture de surface et les
solutions
Le problème de la couverture de surface consiste
à décider de l'activité des noeuds, qui peuvent être
en état actif ou de veille, tout en conservant une couverture aussi
complète que possible de la zone sur laquelle le réseau a
été déployé.



Algorithme de ZHONG.G et CHENG.J [38]
· Tous les noeuds sont en mode passif.
· Chaque capteur s'active pour envoyer un message de
sondage.
· Tous les noeuds actifs dans un rayon de communication
Rc (identique pour chaque noeud) le reçoivent.
· Chacun observe alors si sa distance par rapport
à l' MINIM
inferieure à une distance Rs, egalement identique
pour chaque noeud.
o EmiThir[NI
mtNIml1$1111171nrimifNIieuNIeilm rtNI mi17
à l'emetteur, lui permettant ainsi de repasser en
mode passif.
o Sinon, aucun message n'est envoye
et le capteuNI rirNI
decide devenir actif. Il le reste alors jusqu'à
epuisement total de
imilieNImT

53

|
Mise en veille alternative [38]
|
n Dans une première phase de découverte du
voisinage, des messages HELLO sont ~mis tour à tour par chacun des
noeuds
· Ensuite, chacun dcide d'un temps d'attente alpatoire
au bout duquel il calcule la couverture fournie par ses voisins.
· S'il dPcide de rester actif, aucun message n'est
envoyp.
· en cas de couverture totale de sa propre zone de
surveillance, il dcide d'être inactif et envoie un message de retrait
à ses voisins Ceux n'ayant pas encore dPcid~ mettent à jour leur
table de voisinage.
Les résultats validés ont montré que
cet algorithme permet de diminuer consid~rablement le nombre de noeuds actifs
tout en conservant une couverture totale du réseau.
II.5 Conclusion
Contrairement aux réseaux traditionnels qui se
préoccupent de garantir une bonne qualité de service, les
réseaux de capteurs doivent, en plus, donner de l'importance à la
conservation d'énergie. Ils doivent intégrer des
mécanismes qui permettent aux utilisateurs de prolonge la durée
de vie du réseau en entier, car chaque noeud est alimenté par une
source d'énergie limitée et généralement
irremplaçable.
Par conséquent on peut dire que les grands
problèmes qui limitent les RCSF sont, le problème de la
connectivité et de la couverture, contrainte d'énergie et la
panne des noeuds capteurs.
Nous avons également étudié les travaux
existants et des solutions proposées pour les problèmes de la
couverture d'un réseau de capteurs.
CHApITRE III

LE RouTAGE ET LA
sECuRITE DANs LEs
REsEAuX DE CApTEuRs
sANs FIL

55
III.1 Introduction
Les protocoles de routage au sein des WSN sont
influencés par un facteur déterminant à savoir : la
minimisation de la consommation d'énergie sans une perte
considérable de l'efficacité. Dans les réseaux de
capteurs, chaque noeud joue le rôle de source et de relais. De ce fais,
la défaillance énergétique d'un capteur peut changer
significativement la topologie du réseau et imposer une
réorganisation coûteuse de ce dernier.
De l'autre côté, la sécurité a une
très grande importance pour plusieurs applications intéressantes
des réseaux de capteurs sans fil telle que la surveillance des champs de
bataille, la détection des feux de forêts ou la mesure de la
température et de la pression dans les canalisations d'huile. La
fiabilité de ces systèmes est un enjeu majeur, et l'existence des
failles de sécurité représente un risque non
toléré.
Dans ce chapitre on va mettre en évidence quelques
protocoles de routages et leurs classifications. Par la suite on va expliquer
les problèmes de la sécurité dans les WSN, ainsi les
menaces contre les RCSF. Puis nous étudierons les moyens pour combattre
ces dangereux menaces.
III.2 Le routage dans les RCSF
La propagation et la délivrance des données
dans un RCSF représentent la fonctionnalité la plus importante du
réseau. Elle doit prendre en considération toutes les
caractéristiques des capteurs afin d'assurer les meilleures performances
du système : durée de vie, fiabilité, temps de
réponse, ... etc.
Vu la spécificité des RCSF, un nombre important
de recherches sont orientées vers une violation du découpage en
couches protocolaires indépendantes, et introduisent la notion de cross
layer optimisation. Par exemple, en utilisant des mécanismes
d'agrégation, les routeurs intermédiaires doivent accéder
à la donnée afin d'établir des résumés des
lectures de la région [9].

III.2.1 Taxonomie des protocoles de routages
Taxonomie
Récemment, les protocoles de routage pour les RCSF ont
été largement étudiés, et différentes
études ont été publiées. Les méthodes
employées peuvent être classifiées suivant plusieurs
critères comme illustré sur la figure suivante :
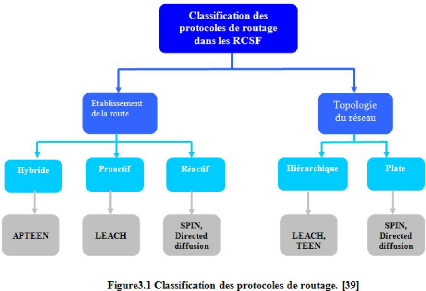
Topologie du réseau [9]
La topologie détermine l'organisation des capteurs dans
le réseau. Il existe deux principales topologies dans les protocoles de
routage pour les RCSF.
> Topologie plate : dans une topologie
plate, tous les noeuds possèdent le même rôle. Les noeuds
sont semblables en termes de ressources.
> Topologie hiérarchique : afin
d'augmenter la scalabilité du système, les topologies
hiérarchiques ont été introduites en divisant les noeuds
en plusieurs niveaux de responsabilité. L'une des méthodes les
plus employées est le clustering, où le réseau est
partitionné en groupes appelés "clusters". Un cluster est
constitué d'un chef (cluster-head) et de ses membres.

57
Etablissement de la route
Suivant la manière de création et de
maintenance des routes lors de l'acheminement des données, les
protocoles de routage peuvent être séparés en trois
catégories : les protocoles proactifs, les protocoles réactifs et
les protocoles hybrides. [32]
> Protocole proactif : Ces protocoles de
routage essaient de maintenir les meilleurs chemins existants vers toutes les
destinations possibles au niveau de chaque noeud du réseau. Les routes
sont sauvegardées mêmes si elles ne sont pas utilisées.
Chaque noeud du réseau maintient une table de routage pour toutes les
destinations indépendamment de l'utilité des routes. Les
protocoles proactifs sont adaptés aux applications qui
nécessitent un prélèvement périodique des
données. Et par conséquent, les capteurs peuvent se mettre en
veille pendant les périodes d'inactivité, et n'enclencher leur
dispositif de capture qu'à des instants particuliers.
> Protocole réactif : Ces
protocoles (dits aussi, les protocoles de routage à la demande)
créent et maintiennent des routes selon les besoins. Lorsque le
réseau a besoin d'une route, une procédure de découverte
de route est lancée. Ce type de protocoles est pratique pour des
applications temps réel où les capteurs doivent réagir
immédiatement à des changements soudains des valeurs
captées. En effet, un prélèvement périodique des
données aurait été inadapté pour ce type de
scénarios.
> Protocole hybride : Ces protocoles
combinent les deux idées des protocoles proactifs et réactifs.
Ils utilisent un protocole proactif pour apprendre le proche voisinage (par
exemple le voisinage à deux ou à trois sauts), ainsi, ils
disposent de routes immédiatement dans le voisinage. Au-delà de
la zone du voisinage, le protocole hybride fait appel à un protocole
réactif pour chercher des routes.
III.2.2 Exemples des protocoles de routages dans les RCSF
III.2.2.1 SPIN [9]
Heinzelman et al ont proposé une famille de protocoles
appelée SPIN (Sensor Protocols for Information via Negotiation),
reposant sur un modèle de négociation afin de propager
l'information dans un réseau de capteurs. Le but de SPIN est de pallier
aux problèmes de l'inondation, qui sont :

· L'implosion due à la duplication inutile des
réceptions d'un même message.
· Le chevauchement lié au déploiement dense
des capteurs. En utilisant l'inondation, les capteurs d'une zone
émettrons tous la même donnée (ou presque).
· L'ignorance des ressources, car d'inondation ne prend pas
en considération les ressources des noeuds.
Ces trois problèmes affectent grandement la durée
de vie et les performances du réseau. Pour les résoudre, SPIN
adopte deux principes :
o La négociation : pour éviter le
problème d'implosion, SPIN précède l'émission d'une
donnée par sa description, en utilisant la notion de
métadonnées. Le récepteur aura le choix par la suite
d'accepter la donnée ou non. Ce mécanisme permet aussi de
régler le problème de chevauchement.
o L'adaptation aux ressources : d'une manière
continue, les noeuds contrôlent leur niveau d'énergie. Le
protocole SPIN accommode son exécution suivant l'énergie restante
du capteur, et modifie en conséquence le comportement du noeud.
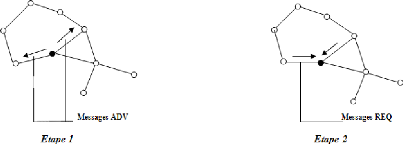
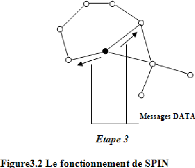
Fonctionnement de SPIN
Les communications dans SPIN se font en trois étapes :
· Lorsqu'un noeud veut émettre une donnée, il
émet d'abord un message ADV contenant une description de la
donnée en question.
· Un noeud recevant un message ADV, consulte sa base
d'intérêt. S'il est intéressé par cette information,
il émet un message REQ vers son voisin.
· En recevant un message REQ, l'émetteur transmet
à l'intéressé la donnée sous forme d'un message
DATA.
La figure suivante illustre ces trois étapes :

59
III.2.2.2 Directed Diffusion [9]
Aperçu
Directed Diffusion est un protocole de propagation de
données, permettant d'utiliser plusieurs chemins pour le routage
d'information. Le puits diffuse un intérêt sous forme de
requête, afin d'interroger le réseau sur une donnée
particulière. Il se base sur le modèle publish/subscribe. DD
repose sur quatre éléments : nomination des données,
propagation des intérêts et établissement des gradients,
propagation des données et renforcement des chemins.
1. Nomination des données
L'adressage dans DD utilise un schéma attribut-valeur
afin de décrire les intérêts et les rapports de
données.

Exemple : Nomination des données
Par exemple, dans une application de protection de forêts,
une requête peut être effectuée sous cette forme :
Type = GetTemperature Zone = [100, 100, 120, 120]
Interval = 10 ms
Durartion = 1 mn
Une réponse d'un capteur pourra être
formulée ainsi :
Type = GetTemperature Location = (110, 115) Temperature
= 32
Timestamp = 11:32:10
2. Propagation des intérêts et
établissement des gradients
Lorsqu'un puits requiert une donnée du réseau,
il propage un intérêt, contenant sa description ainsi que le
débit d'information désiré. Initialement, le puits
spécifie un grand intervalle, dans un but d'exploration. Cela permet
d'établir les gradients et de découvrir d'éventuelles
sources, sans pour autant encombrer le réseau.
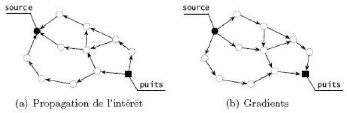
Figure3.3 Propagation des intérêts et
établissement des gradients.

61
Propagation des l'intérêts
Afin de propager l'intérêt, DD emploie l'inondation
globale du réseau. Chaque noeud maintient localement un cache
d'intérêt contenant les informations suivantes :
· La description de l'intérêt, en utilisant le
schéma de nomination.
· Un ensemble de gradients.
Définition : Gradient
Un gradient est un vecteur représentant
l'intérêt. Il est caractérisé par une direction et
une amplitude : la direction est modélisée par le voisin
émetteur de l'intérêt, et l'amplitude est
représentée par le débit de données. En plus,
chaque entrée contient un champ limitant la durée de
validité du gradient.
Méthode : Etablissement des gradients
Lorsqu'un noeud reçoit un intérét, il
parcourt son cache :
· Si le cache ne contient aucune entrée relative
à l'intérêt reçu, une nouvelle entrée est
créée avec un gradient vers le voisin émetteur.
· Dans le cas contraire, le noeud recherche un gradient
vers le voisin émetteur, et met à jour en conséquence
l'entrée en question.
Après le traitement du cache, le noeud relaie
l'intérêt vers ses voisins. La méthode la plus simple est
d'utiliser l'inondation.
3. Propagation des données
Lorsque l'intérêt atteint les sources
ciblées, les capteurs commencent la récolte d'information. Pour
un intérêt donné, un capteur calcule le débit le
plus élevé et prélève les données en
conséquence. En consultant les gradients relatifs à
l'intérêt, le noeud détermine les prochains sauts vers les
puits (chacun avec son propre débit).
Lorsqu'un noeud reçoit une donnée, il recherche un
intérét équivalent dans son cache. Siaucune
entrée n'est trouvée, le paquet est supprimé. Dans le cas
contraire, en consultant la liste des gradients, le noeud relaie la
donnée vers ses voisins, suivant le débit de chacun d'eux.

Remarque : Evitement des boucles
Avant de relayer une donnée à ses voisins, un
noeud utilise son cache de données. Ce cache enregistre les
données récemment émises par les voisins. Cela
évite la création de boucles, en supprimant les données
déjà rencontrées.
4. Renforcement des chemins
? Renforcement positif
Lorsque le puits reçoit les premières
données, il renforce le chemin vers le voisin émetteur, en
augmentant le débit de captage. Cela permet de clôturer la phase
d'exploration, et d'entamer la phase de récolte d'information. Le
renforcement ne doit pas s'arrêter au niveau des voisins du puits, mais
doit se propager éventuellement jusqu'aux sources.
Pour ce faire, lorsqu'un noeud reçoit un message de
renforcement, il consulte son cache d'intérêt. Si le débit
spécifié dans le message est plus grand que tous les autres
débits des gradients présents, le noeud doit renforcer un de ses
voisins. Le voisin est choisi en utilisant le cache de données.

Figure3.4 Renforcement des chemins
? Renforcement négatif
Dans le cas de panne d'un lien (perte de paquet, débit
réduit, etc.) le puits peut envoyer un renforcement négatif sur
le chemin en panne en spécifiant le débit de base (exploratoire),
et en procédant à un renforcement positif d'un chemin
alternatif.

63
III.2.2.3 LEACH (Low-Energy Adaptive Clustering
Hierarchy)
LEACH est un protocole de routage
destiné aux réseaux de capteurs. Son principal avantage est de
minimiser la consommation énergétique des éléments
du réseau. C'est un protocole hiérarchique, car le réseau
est divisé en clusters, et chaque cluster possède un noeud
`maître' (Clusterheads (CHs)), le noeud maître est en charge de la
gestion de sont cluster. Il est élu périodiquement parmi les
noeuds formant le cluster, en fonction de l'état de sa batterie.
Un message qui est émis par un noeud au sein d'un
cluster, est ensuite route par le Clusterheads (CHs) vers la passerelle du
réseau de capteur.
Ce protocole permet ainsi en structuration le réseau de
manière hiérarchique de proposer un protocole qui
économise l'énergie d'un capteur désirant émettre
un paquet [7].
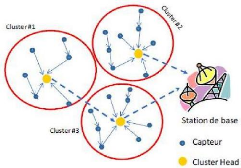
Figure3.5 Le Clustering dans un RCSF
III.2.2.4 TEEN et APTEEN (Threshold sensitive Energy
Efficient sensor Network protocol)
TEEN est un protocole hiérarchique conçu pour
être sensible aux changements soudains des attributs captés tels
que la température. L'architecture du réseau est basée sur
un groupement hiérarchique où des noeuds les plus proches forment
des clusters. Après la construction des clusters, le cluster-head
diffuse deux seuils aux noeuds. Qui sont la valeur minimale d'un attribut pour
pouvoir être transmit et le degré minimal du changement de cet
attribut.

Le TEEN adaptif (APTEEN) est une extension du TEEN
basée sur la capture périodique des données et
réaction aux événements temps-réel. Quand la
station de base forme les clusters, les cluster-heads diffusent les attributs,
les seuils et le plan de transmission à tous les noeuds et effectuent
également l'agrégation des données afin
d'économiser de l'énergie [7].
III.3 La sécurité dans les RCSF
III.3.1 Vue globale des problèmes de
sécurités dans les RCSF
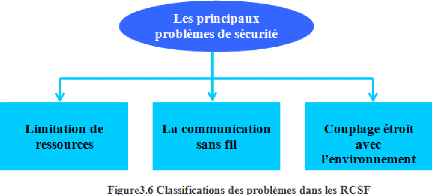
Les principaux problèmes de sécurité dans
les RCSF émergent à partir des propriétés qui les
rendent efficaces et attrayants, qui sont [9]:
> Limitation de ressources:
l'énergie est peut-être la contrainte la plus forte aux
capacités d'un noeud capteur. La réserve d'énergie de
chaque noeud doit être conservé pour prolonger sa durée de
vie et ainsi que celle de l'ensemble du réseau. Dans la plupart du
temps, l'information transmise est redondante vus que les capteurs sont
généralement géographiquement co-localisés. La
plupart de cette énergie peut donc être économisée
par agrégation de données. Cela exige une attention
particulière à détecter l'injection de fausses
données ou la modification défectueuse de données, lors
des opérations d'agrégation au niveau des noeuds
intermédiaires.
> La communication sans fils multi-sauts:
en plus de fournir un déploiement simple, la communication sans
fil a l'avantage d'offrir l'accès à des endroits difficilement
accessibles tels que des terrains désastreux et hostiles.
Malheureusement, la portée de

65
la communication radio des "motes" est limitée en
raison de considérations énergétiques. La communication
multisauts est donc indispensable pour la diffusion des données dans un
RCSF. Cela introduit de nombreuses failles de sécurité à
deux niveaux différents: attaque de la construction et maintenance des
routes, et attaque des données utiles par injection, la modification ou
la suppression de paquets. En outre, la communication sans fil introduit
d'autres vulnérabilités à la couche liaison en ouvrant la
porte à des attaques de brouillage et de style déni de service
par épuisement des batteries.
> Couplage étroit avec l'environnement:
la plupart des applications de RCSF exigent un déploiement
étroit des noeuds à l'intérieur ou à
proximité des phénomènes à surveiller. Cette
proximité physique avec l'environnement conduit à de
fréquentes compromissions intentionnelles ou accidentelles des noeuds.
Comme le succès des applications RCSF dépend également de
leur faible coût, les noeuds ne peuvent pas se permettre une protection
physique inviolable. Par conséquent, un adversaire "bien
équipé" peut extraire des informations cryptographiques des
noeuds capteurs. Comme la mission d'un RCSF est généralement sans
surveillance, le potentiel d'attaquer les noeuds et de récupérer
leur contenu est important. Ainsi, les clefs cryptographiques et informations
sensibles devraient être gérées d'une manière qui
augmente la résistance à la capture des noeuds.
III.3.2 Attaques sur les protocoles de routage dans les
RCSF
Vus les contraintes des RCSF, la plus part des protocoles de
routage sont assez simple, et par conséquent assez vulnérables
aux attaques. Un noeud malicieux peut opérer sur deux niveaux
[9]:
· Les données échangées entre les
noeuds.
· La topologie du réseau créée par le
protocole
Ces attaques peuvent être classées en deux
catégories : actives et passives.
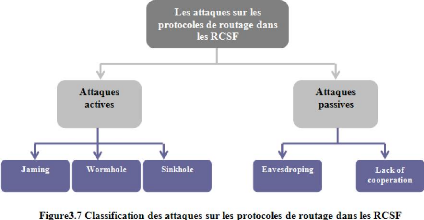
III.3.2.1 Attaques actives

L'adversaire tente de supprimer, ajouter ou modifier les
transmissions sur un canal de communication. Un adversaire actif menace
l'intégrité et l'authenticité des données aussi
bien que leur confidentialité. Afin d'exécuter son attaque, le
noeud malicieux est obligé d'utiliser son énergie, en
émettant un certain nombre de paquets.
1) Attaque de « Jamming »
Vu la sensibilité du média sans fil au bruit, un
noeud peut provoquer un déni de service en émettant des signaux
à une certaine fréquence. Cette attaque peut être
très dangereuse car elle peut être menée par une personne
non authentifiée et étrangère au réseau
[9].

Figure3.8 Attaque de "jamming"

67
1) Attaque de «Sink hole »
Dans une attaque sink hole, le noeud essaye d'attirer vers lui
le plus de chemins possibles permettant le contrôle sur la plus part des
données circulant dans le réseau. Pour ce faire, l'attaquant doit
apparaître aux autres comme étant très attractif, en
présentant des routes optimales [9].
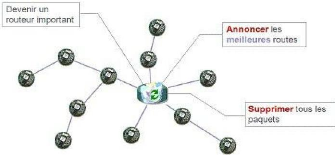
Figure3.9 Attaque « sinkhole »
2) Attaque de « Wormhole »

Dans une attaque wormhole, un attaquant reçoit
des paquets dans un point du réseau, puis les encapsule vers un autre
attaquant pour les réintroduire dans le réseau. Dans ce genre
d'attaque, les adversaires coopèrent pour fournir un canal à
basse latence pour la communication en utilisant une radio pour communiquer
avec une puissance plus élevée et des liens à longue
portée. Ceci favorise les noeuds voisins à acheminer leurs
données à travers l'attaquant [13].
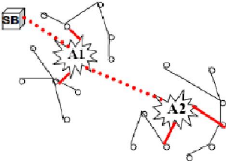
Figure3.10 Attaque « Wormhole »
Une défense pour contrer les wormholes consiste
à utiliser des paquets dans lesquels la distance qu'un message peut
traverser dans un seul saut est limitée. Chaque message comporte une
estampille et l'emplacement de l'émetteur. Le récepteur compare
ces derniers au temps d'arrivée et à son emplacement pour
déterminer si la portée de transmission maximale a
été dépassée. La solution exige une synchronisation
d'horloge et la vérification précise d'endroit, ce qui peut
limiter son applicabilité au RCSF [13].

69
III.3.2.2 Attaques passives [9]
L'adversaire ne fait que surveiller les canaux de
communication. Une écoute se produit lorsqu'un attaquant capture un
noeud et étudie le trafic qui le traverse sans en altérer le
fonctionnement. Un adversaire passif ne fait que menacer la
confidentialité des données.
1. Lack of cooperation ou Selective
ForWarding
Tous les protocoles de routage supposent que les noeuds sont
"honnêtes" et vont relayer normalement les paquets qui transitent par
eux. Cependant, un attaquant peut violer cette règle en supprimant la
totalité ou une partie de ces paquets. De plus, si l'attaquant a
auparavant utilisé une attaque sinkhole, il devient un routeur important
dans le réseau. Donc, en abandonnant son rôle de routeur, les
performances du système seront gravement dégradées.
2. Eavesdropping
Comme le média sans fil est un média ouvert, un
noeud peut entendre toutes les communications de ses voisins. Cela peut
divulguer d'importantes informations, comme la localisation d'un noeud
important. La combinaison avec une attaque sinkhole aggrave d'avantage l'impact
de cette attaque.
III.3.3 Les mécanismes de défense
III.3.3.1. La cryptographie
1. La confidentialité des donné :
la confidentialité empêche les données
d'être consulté par des entités non autorisé
l'approche standard pour sauvegarder leurs sécurité est
d'utiliser des algorithmes de chiffrements. Ces derniers permettent de
transformer un message en claire en un message chiffré. [33].
Il existe deux modes de chiffrement: [34]
· Chiffrement asymétrique :
dans le chiffrement asymétrique le récepteur
génère une partie de clés asymétrique : une
clé publique

qui est diffusé à tous les émetteurs et
une clé privé maintenue secrète chez lui. Tous message
chiffré avec la clé publique ne peut être
déchiffré qu'avec la clé privé qui
correspondante


La cryptographie à clé publique est faiblement
utilisé dans les RCSF car elle est très coûteuse en termes
de ressources et par conséquent, la plus part des protocoles
proposé emploient des méthodes de chiffrements
symétriques. [33]
Chiffrement symétrique : dans le
chiffrement
symétrique une même clé est
partagée entre l'émetteur et le récepteur. Elle est
utilisée par l'émetteur pour chiffrer le message et par le
récepteur pour le déchiffrer.
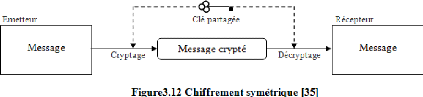
2. / 41EtfrfthfraSliaSIKEfrei :
c'est un service qui garantit que les données n'ont pas
été altérées pendant la transmission. On peut
distinguer les altérations accidentelles liées, par exemple
à une mauvaise couverture des ondes et les altérations
volontaires d'un attaquant.
Une fonction de hachage est typiquement utilisée pour
vérifier l'intégrité des données :
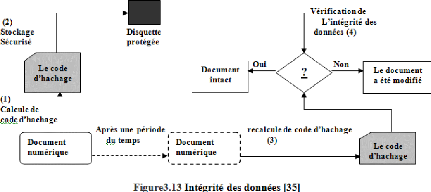
1-

71
Initialement le code d'hachage du document numérique est
calculé.
2- Ce code est stocké dans un emplacement
sécurisé.
3- Ultérieurement ce code est recalculé.
4- Le nouveau code d'hachage est comparé à
celui qui a été stocké. Si les deux valeurs sont
égales alors le document n'a pas été modifié. Sinon
le document a subit une modification [34].
3. /'authentification de l'origine des
données : dans un réseau de capteur, un adversaire peut
facilement injecter des paquets additionnels, ainsi le récepteur doit
s'assurer que les données reçus proviennent effectivement de la
source supposé.
L'authentification des données est assuré
grâce à un mécanisme purement symétrique : Le Code
d'Authentification de Message (CAM), ou MAC en anglais (Message
Authentification Code). Le MAC est aussi utilisé pour vérifier
l'intégrité des données [33].
Pour garantir l'authenticité de l'origine,
l'émetteur et le récepteur doivent partager une clé
symétrique.
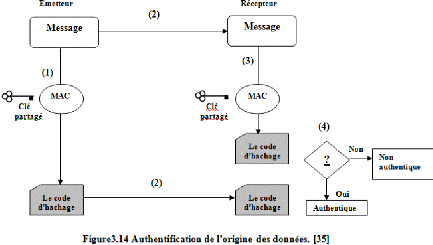
1.

Cette clé sera utilisée par l'émetteur pour
calculer un MAC sur le message à envoyer.
2. Ce MAC (code de hachage) est la preuve d'authenticité
qui accompagnera le message.
3. LE récepteur utilisera la même clé
secrète pour calculer le MAC de nouveau sur le message reçus.
4. Le MAC nouvellement calculé sera comparé au
MAC accompagnant le message. Si les deux valeurs sont égales alors le
message et l'origine sont authentiques. Sinon l'un des deux n'est pas
authentique. [34]
4. Le Q1Q 46X12EMQ 12111411.iQ1 : c'est un
mécanisme destiné à prévenir que la source ou la
destination désavoue ses actions ou nie qu'un échange a eu lieu.
Ce service est assuré grâce à la signature
numérique. [34]
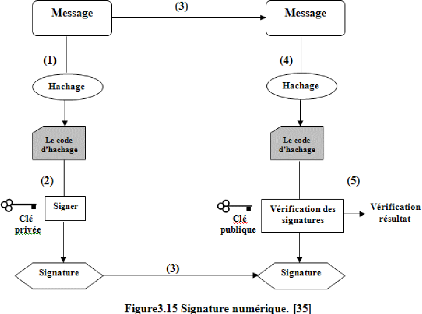
1.

73
L'émetteur commence par calculer le code hachage du
document.
2. L'émetteur signe ce code de hachage avec sa clé
privée.
3. Le résultat de cette dernière opération
est la signature digitale qui accompagnera le document.
4. Quand le récepteur reçoit le message et la
signature digitale, il recalcule le code de hachage.
5. Le récepteur déchiffre la signature avec la
clé publique de l'émetteur et compare les deux codes de hachages.
Si les deux codes sont similaires alors la signature est valide.
5. La fraîcheur des données :
Méme si l'authentification, l'intégrité et la
confidentialité des données sont
assurées. On doit également assurer la fraîcheur de chaque
message. La fraîcheur des données permet de garantir que les
données sont récentes, et qu'aucun vieux message n'a
été rejoué. Cette condition est particulièrement
importante quand on utilise des stratégies de clés
partagées dans la conception. En effet, ces dernières doivent
être

continuellement changées avec le temps. Cependant, pour
que de nouvelles clés se propagent dans tout le réseau, un temps
important s'écoule. Dans ce cas il est facile pour un adversaire
d'employer une attaque de rejeu. Pour résoudre ce problème un
compteur relatif au temps peut être rajouté dans le paquet pour
assurer la fraîcheur des données. [36]
III.3.3.2 IDS (Intrusion Détection System) [37]
Définition
Système combinant logiciel et matériel, qui
permet de détecter en temps réel les tentatives d'intrusion sur
un réseau interne ou sur un seul ordinateur hôte, de neutraliser
ces attaques réseaux ou systèmes et d'assurer ainsi la
sécurité du réseau.
Principes de fonctionnement d'un IDS
Indépendamment de l'approche qu'ils utilisent, de
l'origine de leur source de données ou de tout autre paramètre,
les IDS ont besoin de certaines fonctions répétitives pour
accomplir leurs tâches.
Un IDS, doit disposer de quatre fonctions principales,
générées par les composants suivants:
· Un générateur
d'événements « GE ~: Dont le rôle est de
collecter les événements soit du réseau (capture de trame)
ou d'un hot (analyse des fichiers d'audit), et de les fournir dès leur
apparition aux autres composant. Il représente donc le point de contact
entre l'IDS et le système surveillé.
· L'analyseur d'événement «
AE : C'est l'élément pensant de l'IDS. Il reçoit
des données des autres composants, les analyses et identifie les
comportements « à risque». Plus un système informatique
est complexe, plus les algorithmes de la « AE » doivent être
performants. La connaissance de son comportement constitue une information
déterminante pour les pirates qui souhaitent le contourner.
· La base de données
événementielle « BDE » : Elle assure la
journalisation des événements ce qui permet de conserver une
trace des événements à long terme.
· L'unité de réponse : Elle
a pour vocation de fournir en temps réel ou différé une
réponse aux attaques qu'elle détecte.
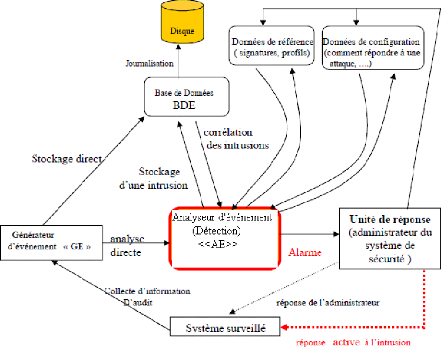
Figure3.16 Architecture de base pour un IDS
[37]

75
III.4 Conclusion
Le routage dans les réseaux de capteurs est un
problème complexe. Ceci est dü, d'une part, à ces protocoles
qui peuvent varier suivant les différentes approches de routage, et
d'une part, les solutions de routage proposées dans le cas des
réseaux ad hoc ne sont pas applicables directement dans les
réseaux de capteurs. Bien que l'objectif principale reste le même,
c'est-àdire : trouver la façon la plus simple d'acheminer les
paquets de données d'une source vers une destination.
En ce qui concerne la sécurité, elle est
très importante pour la réussite de plusieurs applications des
réseaux de capteurs. Cependant assurer la sécurité de ces
réseaux est une tâche très complexe en raison des
possibilités limitées des noeuds capteurs.

Ce chapitre a donnée une vue globale sur les techniques
de routage dans les réseaux de capteurs sans fil et qui ont comme
objectif commun le prolongement de la durée de vie du réseau.
Egalement dans ce chapitre notre but était de fournir une vue
générale du large secteur de la sécurité des RCSF.
Donc, nous avons décrit les principaux problèmes de la
sécurité ainsi les meilleurs mécanismes existent pour les
supporter.

77
Conclusion générale
Les réseaux de capteurs sans fil (RCSF) sont une
nouvelle technologie qui a surgit après les grands progrès
technologie concernant le développement des capteurs intelligents, des
processeurs puissants et des protocoles de communications sans fil. Ce type de
réseau composé de certaines ou de milliers
d'éléments, a pour but de la collecte de données de
l'environnement, leur traitement et leur dissémination vers le monde
extérieur.
Les applications des réseaux de capteurs sans fil sont
nombreuses. Elles comprennent différents domaines : agricole,
militaire,... Pour que ces réseaux puissent mener à bien leurs
missions ils doivent assurer un certain niveau de sécurité qui
différent selon l'application déployée.
Dans ce travail nous avons débuté par une
étude approfondie des RCSF, dans le but de mettre en évidence les
services critiques du réseau. Donc nous avons donné un
aperçu sur les RCSF et présenté certaines de leurs
applications. Nous avons aussi exposé des différents
problèmes qui concernent l'économie d'énergie qui est
considéré comme un facteur principale qui limite la duré
de vie d'un capteur, nous avons également expliqué quelques
travaux existant qui visent à maximiser la durée de vie d'un
réseau.
Ensuite, on a abordé un état d'art sur les
algorithmes proposés pour pallier les problèmes de
connectivité et la couverture.
Puis on a discuté brièvement les
différents défis que doit surmonter la conception des protocoles
de communications dans ces réseaux. Nous nous sommes
intéressés aux problèmes liés à la
sécurité et en particulier du protocole Directed Diffusion. Ce
dernier est l'uns des protocoles les plus réussis qui tend à
être un standard et a été une base pour d'autres
contributions.
Finalement, nous avons cité quelques principaux
problèmes de la sécurité ainsi les meilleurs
mécanismes existent pour les supporter.

BIBLIOGRAPHIE
[1] :
http://fr.wikipedia.org/wiki/R%C3%A9seau_ad_hoc
[2]: Akyildiz, I. F., Su, W.,
Sankarasubramaniam, Y. and Cayirci, E. « Wireless sensor
networks >> a survey. Computer Networks 38: 393-422,
2002.
Cosmos.kaist.ac.kr/gwn/presentations/wireless/4_Leep.ptt
F., Computer Networks, Vol. 38(200), pp.393-422, pdf.
[3] : Louise Lamont, Louise, Centre de
recherches sur les communications Canada CRC. Juin 2006.
http://www.cihr-ircs.gc.ca/f/documents/cihr_aanual_report_2004
[4] : Benahmed Khélifa « Approche
théorie des graphes pour la surveillance d'un Réseau de Capteurs
sans fil >> Magister en Informatique.
[5]:
http://
ares.insa-lyon.fr/tarot/download/EricFleury_10_03.pdf
[6] : G.Chelius, E.Fleury et T.Mignon.
«Broadcast, énergie et réseaux de capteurs
sans fil >>. CITI, Insa de Lyon-ARES, INRIA, 2004.
http://ares.insa
lyon.fr/tarot/download/EricFleury_10_03.pdf
[7] : Alexandre Delye de Mazieux, Vincent
Gauthier, Michel Marot, Monique Becker « Etat de l'art
sur les réseaux de capteurs >> Institut National
des télécommunications, France
http://info.iut-bm.univ-fcomte.fr
[8] : M.Assia et M.Zohra
«Optimisation de la durée de vie des noeuds d'un
réseau de capteurs sans fil>> Ingénieur en
Informatique, université de Béchar.
[9] : Yacine CHALLAL «
réseau de capteur sans fil >>, support
de cours, 17/11/2008
[10] :
http://www-igm.univ-mlv.fr/~dr/XPOSE2006/Bunel/Presentation.html
Présentation des réseaux de capteurs sans fil.
[11] : Yasser Romdhane «
Evaluations des performances des protocoles S-MAC et directed
diffusion dans les réseaux des capteurs >>
rapport de projet de f'in d'étude, école supérieure des
communications de Tunis, 2007.
[12]:
http://www.businessweek.com/datedtoc/1999/9935.htm.21
ideas for the 21st century.
[13]: M. Ilyas and I. Mahgoub, «Handbook
of sensor networks Compact wireless and wired Sensing
Systems>>, ISBN 08493196864. CRC PRESS LLS, USA,
2005.

79
[14] : Sofiane MOAD «
Optimisation de la consommation d'énergie dans les
réseaux de capteurs sans fil >> Master recherche
en 2éme année informatique Université : FSIC-Rennes 1,
Laboratoire de recherche : DYONISOS-IRISA 2008
[15]: A. Manjeshwar and D. P. Agarwal.
«Apteen: A hybrid protocol for efficient routing and
comprehensive information retrieval in wireless sensor
networks>>, Parallel and distributed processing
Symposium. Proceedings International, IPDPS, pp. 195-202, 2002.
[16] : I. Akyildiz, W. Su, E. Cayirci, Y.
Sankarasubramaniam. «A survey on sensor
networks>>, IEEE Communications Magazine, vol. 40, no.
8, pp. 102-114, Georgia Institute of Technology, Atlanta, USA. Août
2002.
[17]: W. Heinzelman, A. Chandrakasan, H. Balakrishnan,
«Energy-Efficient
Communication Protocol for Wireless Micro sensor
Networks>>, In proc of the Hawaii International
Conférence on System Science, vol. 8, pp. 8020, January 2000.
[18]: M. Younis and T. Nadeem. «Energy
efficient MAC protocols for wireless sensor Networks>>,
Technical report, university of Mryland baltimre County, USA, 2004.
[19]: Vijay Raghunathan, Curt Schurgers, Sung Park, and Mani B.
Srivastava. Energy-aware Wireless microsensor networks. IEEE Signal Processing
Magazine, 19(2) :40_50, March 2002.
[20] : Rahim KACIMI «
Techniques de conservation d'énergie pour les réseaux
des capteurs sans fil >> Doctorat de l'université
de Toulouse. Septembre 2009.
[21]: Curt Schurgers, Vlasios Tsiatsis, and Mani B.
Srivastava. STEM: Topology management for energy efficient sensor networks. In
Proceedings of the IEEE Aerospace Conference, volume 3, pages 7889, Big Sky,
Montana, USA, 2002.
[22]: Mehmet C. Vuran, Özgür B. Akan, and Ian F.
Akyildiz. Spatio-temporal correlation: theory and applications for wireless
sensor networks. Computer Networks, 45(3):245259,
2004.
[23] : Rabah Meraihi, «
Gestion de la qualité de service et contrôle de topologie
dans les réseaux ad hoc >>, thèse de
doctorat, Université des Sciences et Technologie de Lille, 2005.
[24] : Michael Hauspie, «
Contributions à l'étude des gestionnaires de services
distributes dans les réseaux ad hoc >>,
thèse de doctorat, Université des Sciences et Technologie de
Lille, 2005.
[25]: B.N Clark, C.J Colbourn, and D.S. Johnson.
« Unit Disk graphs. Discrete
Mathematics>>, 86:165_177, 1990.
[26]:

Kleinrock et Silverster L.Kleinrock and J.Silvester.
« Optimum transmission raddi for packet radio networks or
why six is a magic number. In National Telecommunications Conference,
Birmingham>>, Alabama, pages 4.3.2-4.3.5,
http://www.cs.ucla.edu/lk/PS/paper085.pdf
[27]: Benahmed Khelifa, H. Haffaf, Merabti Madjid and David
Llewellyn-Jones3 «Monitoring Connectivity in Wireless
Sensor Networks>>
[28] : Sameera Poduri, Sundeep Pattem,
Bhaskar Krishnamachari, Gaurav Sukhatme, « A unifying
framework for tunable topology control in sensor>>,
university of Southern california, USA, 2005.
[29]: M. Ilyas and I. Mahgoub. «Handbook
of sensor networks Compact wireless and wired Sensing
Systems>>, Printed in the United States of America,
2005.
[30]: Then-Hwang Lai, Covrage and Connectivity Issues in Sensor
Network, Ohio State University, 2005.
[31]: Zongheng Zhou, Samir Das, Himanshu Gupta,
«Connected K-Coverge Problem in Sensor
Network>> Department of Science, SUNY, Stony Brook.
[32]: Raja Jurdak « Wireless Ad hoc and
sensor Networks: A Cross-Layer Design Perspective>>
University college Dublin 2007.
[33]: Mayank Saraogi « security in
wireless sensor Networks>> research report, University
of Tennessee.
[34] : Yacine CHALLAL, Hattem Bettahar,
« Introduction à la sécurité
informatique>>, support de cours, 15/10/2008.
[35] : Abdelraouf Ouadjaout, Abdelmalik
Bachir, Yacine Challal, Nourredine Lasla, Miloud bagaa et Lyes Khelladi,
« on securing wireless sensor networks: issue, solutions
ans challenges>>, rapport de recherché.
[36]: John Paul Walters, Zhengqiang Liang,
Weisang Shi et Vipin Chandhary, « Wireless Sensor
Networks Security: A Survey>> Department of Computer
ScienceWayne State University, 2006.
[37] : Dr : Benahmed Khelifa «
Introduction générale>>,
Cours-Sécurité Informatique Université de Bechar
[38] : A. Gallais, F.Ingelrest, J.Carle et
D.Simplot, « Maintien de la couverture de surface dans
les réseaux de capteurs avec une couche physique non idéale
>>, IRCICA/LIFL, Univ. Lille 1, CNRS UMR 8022
[39] : B.Djawhara et B.Ahlem «
Sécurité de la dissémination de donnée
dans un réseau de capteur sans fil : Cas du protocole Tiny Diffusion
>> Mémoire pour l'obtention du diplôme

81
d'ingénieur d'état en informatique, Ecole national
supérieur d'informatique (E.S.I), OuedSmar, Alger
| 

