3-4 Elément fini barre
3-4-1 Définition
Géométriquement, une barre correspond
à un solide orienté dans la direction x (repère local).
Les dimensions dans le plan (y--z) normal à x sont
relativement petites par rapport à la
dimension longitudinale (figure 3-2). Un
élément fini barre (figure 3-3) schématise un composant
d'une structure qui travaille uniquement en traction ou compression. C'est
généralement un élément à 2 noeuds, qui
comporte 3 inconnues ou degrés de liberté (d.d.l.) par noeud
représentant les composantes de son déplacement dans
l'espace.

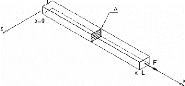
Figure 3-2 : géométrie d'un élément
barre
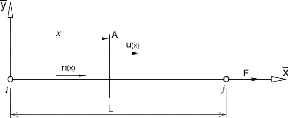
Figure 3-3 : modélisation d'un élément
barre
Les principales hypothèses pour un
élément barre rectiligne qui ne travaille qu'en traction ou
compression sont :
- Petits déplacements
,
U
|
,
(M, t) = u
|
(x, t) x
|
( 3-7)
|
|
- Déformations en petits déplacements
:
- Loi de Hooke dans un milieu isotrope homogène
élastique :
avec a, la contrainte dans la barre et E
est le module de Young du matériau. En intégrant les contraintes
sur la section A, nous obtenons la loi de comportement intégrée
des barres:
n(x) = E A E (3-1 0)
Où n(x) est l'effort normal dans la barre dû
à la force nodale F.
3-4-2 Formulation de l'élément barre dans le
plan
3-4-2-1 Identification du problème
Considérons un élément barre dans le
plan défini par deux noeuds i et
j, de longueur L et de section uniforme A (figure
3-4).
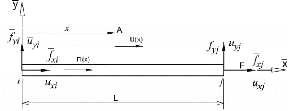
Figure 3-4 : élément barre dans le plan (i
,x,y)
Dans le repère local (i,.,~ y),
on note par uxi et
1~xj les déplacements aux noeuds i
et j, et
|
~
|
~
|
|
par f xi
et f
|
xj les forces aux noeuds i et
j. Le vecteur force relatif à
l'élément e est donné par
:
|
xj f~yj] (3-11)
~
~
~
Fe= [ f
xi fyi f
Le vecteur déplacement est donné
par:
U~e=
[Uxi
Uyi
Uxj
Uyj] (3-12)
~ ~
Dans le cas qui nous occupe,
fyi fyj,
Uyj et
Uyj sont nuls puisque
l'élément barre ne travaille qu'en traction ou
compression.
3-4-2-2 Fonction d'interpolation
Pour un problème statique, lorsque
l'élément est chargé au niveau de ses noeuds, l'effort
normal est uniforme. Compte tenu des relations (3.8) et (3.10), la solution
u(x) sera linéaire. Pour chercher cette solution, nous allons utiliser
une approximation polynomiale linéaire de la forme :
u(x) = N1 fixi
+ N2 fixj
(3-13)
où N1 et N2 sont les coordonnées
naturelles.
Nous identifions aux noeuds i
(x=0) et j (x=L) la valeur de
l'approximation des déplacements axiaux. Nous en déduisons
:
N1= 1- xi et N2=
xi (3-14)
Sous forme matricielle nous écrivons :
U(x)=Nt Ue = [1- A B A
B]C9A~
9A~D (3-15)
La matrice N d'interpolation reliant les
déplacements d'un point intérieur de l'élément aux
déplacements nodaux est donc :
N= [1- x x]t
(3-16)
/ /
| 

