2-Positions et orientations des segments
La définition de la position et de l'orientation d'un
segment distal par rapport à un segment proximal adjacent ne peut se
faire que suite à la construction des repères locaux relatifs
à chaque segment.
La construction de ces repères est effectuée en
accord avec les recommandations de l'ISB [Wu 02, Wu 05]. Cependant, avec un axe
Z horizontal, ces recommandations sont contraires aux conventions
internationales (mécanique, physique, mathématiques
appliquées) ce qui crée des conflits au sein même des
biomécaniciens. Cette normalisation vient suite aux travaux de Grood et
Suntay (1983) qui définissent la séquence des rotations
élémentaires de référence [Groo 83]. Cette
référence est reprise dans les articles de recommandation de
l'ISB.
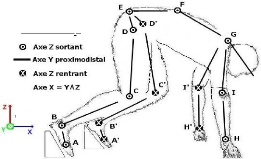
Ainsi, la désignation des axes de rotations articulaires
se fait par rapport à un repère anatomique dont la
définition est la suivante :
§ Oi est l'origine du repère, ce point
coïncide avec le centre fonctionnel de l'articulation,
§ Xi est l'axe antéropostérieur
suivant lequel se font les mouvements d'abduction et d'adduction, il est
orienté en sens opposé pour les deux cotés du corps
§ Yi est l'axe proximodistal (orienté vers
le haut) suivant lequel se font les mouvements
de rotation médiale et latérale
§ Zi est l'axe médiolatéral
orienté en sens opposé pour les deux cotés du corps.
Les
mouvements de flexion et d'extension se font suivant cet axe.
0
0
a0
Definition des Ei :
0
Definition des oriaines des
A, A' : Pieds droit et gauche
B, B' : Jambes droite et gauche
C, C' : Cuisses droite et gauche
D, D' : Pelvis droit et gauche
E : Abdomen
F : Thorax
Figure 78 Positions et orientations des axes de rotations
articulaires
Aussi, afin d'uniformiser les méthodes de calculs et
conduire une analyse comparative des différentes études, l'ISB
recommande l'utilisation des opérateurs homogènes (matrices de
roto-translation).
La description de la position et de l'orientation d'un
segment Si par rapport au repère galiléen de
référence R0 se fait donc suite à la
détermination des éléments de la matrice de
roto-translation i
T0 . Il s'agit d'une matrice 4 x 4 qui
contient un vecteur colonne de translation de l'origine Oi et une
matrice de rotation R0i des axes unitaires.

xi
Ri 0 yi
z i
0 0 0 1
T i
0
~ 0
Éq.VII.1
Afin de déterminer l'orientation d'un repère
segment distal gtsd par rapport à un
repère segment proximal ~sp, il faut
définir la matrice sd
Rsp en fonction de sp
R0 et R0sd
qui
représentent respectivement les orientations de
asp et gtsd par rapport
à g0. La matrice de passage du segment proximal au
segment distal est telle que :
Dsd = R0 sp0 Rsd
Éq.VII.2
'sp
dont Rsp0 est la matrice transposée de
sp
R0 .
2.1-Approximation des repères anatomiques
Afin de contourner le problème d'occlusion de marqueurs,
la construction d'un repère
segmentaire dit repère dynamique / anatomique et
de son opérateur homogène noté Dyn / Anat
T0
est réalisée suite à une procédure
combinant deux types d'enregistrements :
§ enregistrements statiques : l'athlète est
immobile en position anatomique de référence.
Il est équipé des marqueurs techniques et
anatomiques.
§ enregistrements dynamiques : seuls les
marqueurs techniques sont conservés collés sur
le coureur.
Approximation des reperes lors des enregistrements
statiques
La position statique de l'athlète debout bras
écartés évite les problèmes d'occlusion des
marqueurs. Au cours de cette phase, l'athlète est équipé
à la fois de marqueurs techniques et anatomiques.
Les coordonnées de trois marqueurs non
colinéaires (A, B et C) d'un même
segment permettent d'approcher à la fois l'origine du repère
anatomique segmentaire et la direction de
ces axes Xi, Yi, Zi. Un tel
repère est noté R.i Stat/ Anat = (
Oi | Xi ,Yi ,Z i) .
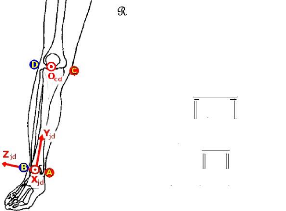
La figure 79 illustre les étapes de construction du
repère statique/anatomique de la
jambe droite R.jd Stat/ Anat à
partir de la position de deux marqueurs anatomique A et C, et
deux
marqueurs techniques B et D.
~~~ ~~ ~~
Ojd milieu de [ AB ]
Ocd milieu de[ CD ]
~~~~~~~~
O jd Ocd
O jd Ocd
~~~~
AB
= ~~~~~~
AB
~~~ ~~ ~~
X jd = Y jd ? Zjd
jd Stat/ Anat
= (O jd| X jd ,Yjd ,Zjd)
~~
=
Yjd
~~
Z jd
Figure 79 Exemple d'approximation du repère
anatomique de la jambe droite (vue antérieure)
Ainsi,
i Stat / Anat
T0
définit l'opérateur homogène associé
à un segment i dont la position
et l'orientation sont définies dans R.0
suite aux enregistrements statiques des marqueurs
anatomiques. Au cours de
ces mêmes enregistrements, la construction d'un deuxième type
de
repère segmentaire appelé repères
statique/technique noté R.i
Stat/Tech est assurée à partir des
seuls marqueurs techniques. L'opérateur homogène
qui y est associé est noté i Stat /Tech
T0 .
Approximation des reperes lors des enregistrements
dynamiques
Rappelons que lors des enregistrements dynamiques, seuls
les marqueurs techniques sont gardés collés sur l'athlète.
La position de ces marqueurs dans 0 permet la construction
d'un repère dynamique/technique ~
iDyn/Tech et sa matrice de roto-translation notéT0
i Dyn/Tech .
i Stat/ Anat
et Ti Stat/Tech lors des
Ayant déjà défini les opérateurs
homogènes 7; 0
enregistrements statiques, il est possible de déterminer
la matrice i Anat
TTech décrivant la situation
du repère anatomique par rapport au
repère technique d'un segment Si comme suit :
,ri Anat T0 T i Stat/ Anat
1Tech =i Stat /Tech· 0 Éq.VII.3
tel que = ( ) -1
T i Stat /Tech T 0
0 i Stat /Tech
La matrice de passage i Anat
TTech
présente l'expression du repère
statique/anatomique
dans le repère statique/technique. Cette
matrice est considérée invariable au cours du temps.
Elle
estime la position et l'orientation du repère anatomique lors
des enregistrements
dynamiques (T0 i Dyn/ Anat) à partir de
la connaissance de la position et de l'orientation du repère
dynamique/technique ( i Dyn / Tech
T0 ). Le calcul se fait comme suit :
T i Dyn/ Anat Tio.
i Dyn/Tech Ti Anat É
0 · 1Tech VII.4
Ainsi, lors des enregistrements dynamiques du geste de
départ, la position et l'orientation de chaque repère
anatomique segmentaire sont définies à chaque instant
dans
par l'opérateur homogène 70 i Dyn/ Anat
.
Il est important de souligner que la position de l'origine du
repère anatomique correspond au centre fonctionnel de
l'articulation en question. Vu l'éloignement de ces points des points
anatomiques palpables (tubérosités), leurs approximation in
vivo est une étape importante qui permet de minimiser l'incertitude
sur les quantités cinématiques et dynamiques calculées
[Crea 07 ; Hold 98 ; Stag 00].
| 

