|
*Remerciement*
Tout d'abord, le grand Merci à mon « DIEU» le
plus puissant, qui m'a donné la force Et la volonté pour finir ce
projet.
De nombreuses personnes ont contribué d'une manière
ou d'une autre, à ce projet. J'aimerai remercier en particulier :
Monsieur Kebsissi Badis, pour son assistance et son
encadrement de haut niveau et pour son soutien permanent, je lui remercie
vivement pour avoir accepté de diriger mon travail.
Je remercie également et plus sincèrement Monsieur
Rachid M ehamdi pour son soutien
et ses précieux conseils.
Merci à Monsieur Lagha, mon promoteur, pour ses conseils
méthodologique et son soutien. Je remercie mes professeurs de
l'institut, qui ont encadré nos études pendant 3ans.
Durant mon projet, j'ai passée prés d'un quart de
mon temps à la base de maintenance
d'Air Algérie, précisément dans le
département de planning. J y'ai donc connu de nombreuses personnes, je
les remercie tous, commençant par Monsieur Gamache qui ma donné
la chance de travailler dans un bureau et il m'a aidé aussi avec ses
conseils, de l'autre côté du département je tiens à
remercier Monsieur Abed et Monsieur Lerbess sans oublier
Monsieur Tsabit et Monsieur Zemouri.
Je tiens à remercier particulièrement l'adorable
HAYET, elle a été comme une grande soeur à moi, elle ma
donnée tout ; l'aide, le sourire de chaque matin, le respect et surtout
les
conseils, je lui dis merci infiniment.
J'ai une pensée particulière à l'ensemble du
personnel de département de planning pour leur accueil, et surtout
monsieur Djamel,,,,,
Je remercie également monsieur Kamel benzetta, le
constantinois, il a été comme un père à nous dans
la base de maintenance, j'espère qu'il sera fier de nous.
Avant de terminer, je remercie les constantinois, surtouts I
men, Yacine avec leurs aides et Tarek, Zahra, Imen2, Khaled ,Lokman et naamen,
on a passé ensemble des agréables moments à l'institut, on
a vraiment oublié qu'on est loin de notre ville Constantine.
Je dis merci à mes amies, car ils m'ont
encouragé à faire ce projet. Boubeker, zahra2, yasmine et ma
promo, surtout le groupe AVIONIQUE, on a passé ensemble 2 ans plein de
joie.
Il y a bien d'autres personnes à qui j'ai pensé en
écrivant ces lignes, mais je n'ai malheureusement pas pu citer tout le
monde..... Pardonnez-moi, et merci tout de même.
Pour finir, je remercie celles et ceux qui auront eu l'audace
d'ouvrir ce rapport et d'en lire une quelconque partie. Je me remercie d'avoir
été là pour achever à temps ce mémoire. Cher
lecteur, excuse moi pour ce paragraphe, mais il fallait bien se détendre
un peu après de longues heures de rédaction en solitaire.
Résumé
Notre étude consiste à présenter un
travail de recherche documentaire sur le CMC de l'A330 « central
maintenance computer »/ « l'ordinateur central de la maintenance
», Dans le but de définir son rôle principal, qui est la
mémorisation et la centralisation des pannes détectées par
le BITE de chaque système dans l'avion A330.
Summary
Our study consists in presenting a documentary research task
on the CM C of central A330 «central maintenance computer», with an
aim of defining its principal role, which is the memorizing and the
centralization of the failures detect ed by the BITE of each system on the A330
ai rcraf t.
êØ??
L¾Ø?? Ä?¾?ì??
?à?Þ??? ?ã¾Ô?? Jj f??tËj
ÊÔÁ JAû ??Ú?ÈÁ
¾?Èã?Ù ?È?i
?? Ä?Ú???? J¾ôc?? ??
??ÔÈ??? ??àØÈ?? J?J 'J?
?ä??Þ?? bJJ.J U?Þüi?? ?Ú?Á A330
. A330 Þ?¾ô?? 'q? ß¾?Ï
??ÁL¾Ø?? (BITE) ß¾?Ð??
4Ç3¾??È?? êÔ???
?Þó
SOMMAIRE
Introduction générale
|
Page
CHAPITRE I : présentation de l'entreprise
«AIR ALGERIE &L'AVION A330 -- 200 » ·
I.1 la
présentation de l'entreprise « AIR ALGERIE » 1
|
|
I.1.1 la direction technique
|
2
|
|
II.2 PRESENTATION DE L'AVION A330-200
|
5
|
|
CHAPITRE II : GENERALITES SUR L'OMS & CMS
.
|
|
|
II.1 introduction
|
7
|
|
II.2 fonction principale du système OMS
|
7
|
|
II.2.1 but et composant de l'OMS
|
7
|
|
II.2.2 l'environnement du système OMS
|
.8
|
|
II.3 présentation du système CMS
|
9
|
|
II.3.1 architecture du CMS
|
9
|
|
II.3.2 fonction principale du CMS
|
.10
|
II.3.3 les périphériques du CMS
............................... .............................11
II.3.3.1 ACARS
..............................................................................
11 II.3.2.2 MDDU
................................................................................12
II.3.2.3 imprimante
............................................................................13
II.3.2.4
MCDU.............................................
.................................14
II.4 conclusion ................................
15
CHAPITRE III : ETUDE DESCRIPTIVE & FONCTIONNEMENT DU
CMC CENTRAL MAINTENANCE COMPUTER
III.1 introduction 16
III.2 rôle principal du CMC 16
III.2.1 l'emplacement du CMC 16
III.2.2 architecture extrême du CM 17
III.2.2.1 architecture du CMC 17
III.2.2.2 caractéristiques principales
17
III.2.2.3 caractéristiques environnementales
17
III.2.3 décomposition du hardware du CMC
18
(Matériel de traitement
d'information).
III.2.4 le module OBRM 18
III.2.4.1 dimensions du l'obrm 18
III.2.5 les connexions internes et externes des cartes
.......... 21
III.2.5.1 la commutation de différentes cartes
............. 22
III.2.6 décomposition du software (logiciel ) du
CMC ......... ......................... 22
III.2.7.1 caractéristiques du bite 25
III.2.7.2 fonctionnement du bite 25
III.2.8 les différences types de connexion
externes ............... ................... 26
III.2.8.1 input/ output digitaux 26
III.2.8.1.1 description 26
III.2.8.1.2 support
physique....................................................... 27
III.2.8.1.3 niveau de liaison
.......................................................... 27
III.2.8.2 input : output discret 31
III.2.8.3 différent types de système
............................. 32
III.2.8.4 la liaison ATEC 34
III.3 architecture interne du CMC
............................... .............................34
III.3.1 la carte CPU
............................................................................34
III.3.2 la carte I/O
.............................................................................36
III.3.3 la carte d'ARINC
...................................................................... 36
III.3.4 la carte d'alimentation
...............................................................36 III.3.5 le
module OBRM
.....................................................................37 III.3.6
ensemble de câble
.....................................................................37
|
III.4 l'alimentation du
CMC................................................................
|
...40
|
|
III.4.1 source d'alimentation
........................................................
|
40
|
|
III.4.2 consommation et facteur de puissance
...............
|
....................... 40
|
|
III.4.3 localisation des disjoncteurs (C/B)
40
|
|
|
III.5 la fonction secondaire (rôle) du CMC
.....................
|
....................... 41
|
|
III.5.1 transmission de paramètres
généraux 41
|
|
III.5.1.1 définition
.........................................................................41
III
.5.1.2 phases de vol
....................................................................41
III .5.1.3 les phase de maintenances
...................... .............................43
III .5.1.4 les conditions FLIGHT /GROUND (vol/sol)
.............................44
III .5.1.5 le temps et la date
................................ .............................44
III .5.1.6 configuration de l'avion
......................... .............................46
III .5.1.7 le traitement
d'avertissement................................................47
du CMC --FDIU-DMU .
III .5.1.8 identification de
l'avion,......................................................47
Flight number ,city pair (from/ to ) .
III.5.2 dialogue avec le
BITE...............................................................48
III.5.2.1mode
d'opération...............................................................48
III.5.2.2 le mode normal
................................. ............................49
III.5.2.3 le mode
interactif..........................................................51
III.5.2.3.1 système type
1.........................................................51
III.5.2.3.2système type2 et
3.....................................................51
III.5.3 interfaces
d'utilisateurs ............................
.............................51
III.5.3.1 dialogue CMC/
MCDU....................................................52 III.5.4 le
management de
computer.....................................................53
III.5.4 .1 le management d'activités de computer
... .............................53
III.5.4 .2 le management de données de
maintenance............................53
III.5.4 .3 la fonction d'auto
test..................................................... ..53 III.5.4.4
contrôle de commutation ......................
.............................54 III.5.4.5 traitement des
paramètres................................................
55
de configuration avioniques.
III.5.4. 6 traitement de pannes et d'avertissements .
.............................56
III.5.4.6.1 traitement d'avertissements ............
.............................56
III.5.4.6.2 traitement de pannes ...................
.............................56
III.5.4.6.3 messages
d'avertissements...........................................56
/pannes et l'option de filtrage.
III.5.4.6.4 les fonctions de corrélation
............. .............................56
|
III.5.5 la fonction interactive
............................
|
.............................57
|
|
III.5.5.1.le fer (rapport de vol)
.....................
|
.............................57
|
|
III.5.5.2rapport LRU
................................
|
.............................59
|
|
III.5.5.3 TSD (trouble shooting data)
............
|
.............................59
|
|
III.5.5.4 GND scanning
.............................
|
.............................60
|
|
III.5.5.5 GROUND report
..........................
|
.............................61
|
|
III.5.5.6 panne de classe 3
..........................
|
.............................61
|
III.5.5.7 test
.....................................................................62
III.5.6 le groupe
facultatif..........................................................63
de la maintenance.
III.5.6.1 servicing report ...........................
............................64
( SRR) ( rapport d'entretien ) .
III.5.6.2 rapport de configuration d'avion
...66
III.5.6.3 flag et advisories ........................
..67
III.5.6.4 rapport AIR/SOL de BITE ...........
.............................67
III.5.6.5 la fonction de téléchargement
....... .............................67
CHAPITRE IV : LA MAINTENANCE DE LIGNE « LINE
MAINTENANCE » DU CMC
IV.1 introduction
...................................................................................68
IV.2 généralités de la maintenance
............................................................. .68 IV.2.1
définition généralités
...................................................................68
IV.2.2 les définition formes de maintenance
................... .............................69
IV.2.2.1 la maintenance corrective
........................... .............................69
IV.2.2.2 la maintenance préventive
........................... ......................... 69
IV.2.3 la maintenance embarquée
................................ .............................69
IV.2.3.1 niveaux de maintenance
................................ .............................69
IV.2.4 l'équipement d'essai incorpore ( BITE )
............... ................ ...........70
IV.2.4.1 but du BITE
........................................................................70
IV.2.4
.2 rôle du BITE
......................................................................70
IV.2.4 .3 diverses classes de pannes
......................... .............................71
IV.2.4 .3.1 les pannes de classe 1
......................... .............................71
IV.2.4.3.2 les pannes de classe 2
.......................... .............................71
IV.2.4.3.3 les pannes de classe 3
........................ .............................71
IV.2.5 les tests
.....................................................................................72
IV.2.5.1 le test de démarrage
...............................................................73 IV.2.5 .2
test cyclique
........................................................................73
IV.2.5 .3 test de système
...................................................................... 73
IV.2.5 .4 test spécifique
......................................................................73
IV.3 test de BIE du CMC
.........................................................................74
IV.3.1 pannes internes du CMC
..............................................................74
IV.3.2 définition du contrôle d'interfaces
........................ ............................75
(bus de réception ARINC) .
IV.3.3 structure de message de panne
......................... .............................76
(bus de réception ARINC).
IV.3.4 pannes d'interfaces avec les output discrets
........... .............................77
IV.3.5 pannes d'interfaces : coupure de courant
............. .............................77
IV.3.6 contrôle de système de type 3
............................. .............................78
IV .4 présentation de la maintenance
............................. .............................78
en ligne « line maintenance ».
IV.4.1 configuration de maintenance et pannes
............. .............................79
IV.4.2 particularités identifiantes
............................... .............................80
IV.4.2.1 TSD (trouble shooting data)
....................... .............................80
IV.4.2.1.1 le décollage de TSD
commun................................................81
IV.4.2.1.2 les tableaux de décodage du code erreur
...... 82
IV.4.2.1.3 exemple sur le décodage du TSD
.............. 83
IV.4.3 test rapide 84
IV.4 .4 les donnes spécifiques
............................................................ 84
IV.4 .5 le CMC et la MMEL 85
(master minimunequipement list) idem pour la MEL
.
IV.4.5.1 les réglementations *(voir annexe)
.............. 85
IV.4.6 trucs de line maintenance
................................ 85
IV.4.6.1 to check (vérifier) dans le cockpit
............... .............................85
IV.4.6.2 procédures 86
IV.4.6.3 sommaire d'écran du MCDU 86
IV.4.6.4 tous les renseignements utiles a
prélever ......... .............. 87
IV.4.6.1 Nécessaire
.......................................................................
87
IV.4.6.2 Nécessaire pour un TS facile
..................................................87
IV.4.6.3 Optionnel 88
IV.5 Installation et démontage du CMC (1TM1,1TM2)
..... 88
IV.5 A Démontage du CMC
(1TM1,1TM2)............................................ 89
IV.5 B Installation du CMC (1TM1,1TM2) ..................
........................... 91
CONCLUSION GENERALE
BIBLIOGRAPHIE ET WEBOGRAPHIE. ANNEXE A
ANNEXE B
LISTE DES FIGURES
Page
Figure I.1 : Dimensions de l'A330-200
......................... ...... ............................6
Figure II.1 : Environnement du OMS
............................... ..............................8 Figure II.2 :
Architecture du CMS
................................................................10 Figure II.3
: Présentation de l'ACARS ...............................
.............................12 Figure II.4 :Présentation du MDDU
................................................................13
II.5
:Imprimante.........................................................................................14
FigureII.6 :MCDU
.....................................................................................15
Figure III.1 : Localisation du CMC
.................................................................16 III.2 :
Architecture du CMC
.........................................................................17
Figure III.3 : Dimensions du CMC
..................................................................19 Figure
III.4 : Dimensions du l'OBRM
..............................................................20 Figure III.5
:Localisation des cartes
................................................................20 Figure III.6
:Connexion interne
...................................................................... 21
Figure III.7 : Connexion interne
.....................................................................21 Figure
III.8 :La commutation des cartes .............................
.............................22 Figure III.9 :Diagramme du software
..............................................................24
|
Figure III.10 :Schématisation du BITE
..............................
|
........................... ..26
|
|
Figure III.11 :Architecture du bus ARINC 429
.....................
|
........................... .27
|
|
Figure III.12 :DGO des bus de communication
.....................
|
.............................30
|
|
Figure III.13 : DGO des bus de maintenance
........................
|
.............................31
|
|
Figure III. 15 : bus d'intermodulation (cross
talk)...........................................
|
31
|
|
Figure III. 16.les I/O discrets
.......................................................................
|
31
|
Figure III.17 système de type 1 avec un seul CMC
32
Figure III.18. système de type 1 avec un seul CMC
concentrateur 32
Figure III.19. Système de type 1 avec 2 CMCs
33
FigureIII.20. Système de type 2
33
Figure III.21 Système de type 3 34
Figure III .22. carte d'alimentation 37
|
Figure III .23.différents composants d'ensemble
de câbles ......
|
....................... ......38
|
|
Figure III.24. connexions entre les cartes
..............................
|
............................39
|
|
Figure III.25.phases de
vol............................................................................
|
42
|
Figure III.26. localisation du LEG 43
Figure III.27.la colock du
secours...................................................................45
Figure III 28.iniatialisation du
temps...............................................................46
Figure III.29.le BITE/ système de type 1
49
Figure III.30 le BITE/ système de type 2
............................ 50
Figure III.31 le BITE/ système de type
3..........................................................50
Figure III.32. Connexion du CMC avec ces
périphériques ....... 52
Figure III.33.controle de commutation
............................... 54
Figure III.34 . le
PFR..................................................................................58
Figure III.35. l'accès au rapport LRU
59
Figure III.36. l'accès au rapportTSD
59
Figure III.37 l'accès au GND
scanning.................................................... 60
Figure III.38. L'accès au ground
report.................................................... 61
Figure III.39. L'accès au rapport de classe 3
62
Figure III.40. L'accès au rapport au rapport du
TEST 63
Figure III.41. L'accès à la programmation
du SRR........................................... 65
Figure III.42.partie d'un rapport de configuration
d'avion 66
Figure III.43.exemple sur un FLAG affiché sur le
PFR 67
FigureIV.1configuration de maintenance et pannes du CMC
79
FigureIV.2. TSD du CMC 81
FigureIV.3. l'accès au test du
CMC................................................................84
|
FigureIV.4. l'accès aux données
spécifiques .........................
|
.............................84
|
|
FigureIV.5.l'écran du
MCDU.........................................................................
|
87
|
|
FigureIV.6. schéma présentant l'utilisation
du TSM/CMS...............................
|
88
|
FigureIV.7.l'acces de CONFIG CHANGE du
CMC.............................................89
FigureIV.8.démontage du
CMC...............................................................
....90
FigureIV.9.l'acces au LRU
IDENT.......................................................
.........93
INTRODUCTION GÉNÉRALE
Le transport aérien connaît
actuellement une crise profonde, que les spécialistes considèrent
comme la crise la plus grave depuis la deuxième guerre mondiale,
même si les conséquences sont variables suivant les zones
géographiques, cette dernière trouve son origine dans la
conjonction de 4 principaux événements:
1. le ralentissement de la croissance économique apparue
au début de 2001 aux états unis, touchant l'Europe dans la
même année.
2. les pertes importantes enregistrées par les
compagnies aériennes suite aux attentats du 11 septembre 2001 aux
états unis résultant en la fermeture quasi totale du ciel
américain.
3. la guerre récente en Irak et les derniers
événements au moyen orient.
4. baisse du trafic aérien de et vers l'Asie à
la suite de l'apparition d'épidémie des maladies graves : (le
syndrome respiratoire aigue sévère (SRAS), et la grippe aviaire)
dans ces régions, qui freine brutalement l'essor économique.
Donc, le transport aérien est un secteur
vulnérable sûrement affecté par ces derniers
événements et aussi par le boum pétrolier, s'il affiche de
lourdes pertes dorénavant c'est principalement à cause de la
flambée du prix du Baril (les derniers événements en
Nigeria) ce dernier va agir directement sur la facture du
kérosène.
Certes que cette crise a bouleversé la
croissance du trafic aérien, mais elle a ouvert la porte d'une
concurrence sévère entre les deux grands concepteurs au monde
(AIRBUS et BOEING). Cette concurrence acharnée de tous les instants et
sur tous les fronts, une véritable guerre ou tous les moyens sont bons
pour rafler un contrat ou gagné un marché. Pour AIRBUS, ce sont
les pays à forte population comme ceux d'Asie qui sont visés pour
le transport de masse avec son A 380.Alors que BOEING joue une carte soft avec
son avion sans pilote expérimentale de la NASA, le X-43 qui bat le
record mondial de vitesse à mach 7 et le B787 Dream Liner.
La croissance du trafic et les exigences
accrues en matière de sécurité vont entraîner une
forte augmentation des besoins de maintenances c'est pour cette
dernière, que les compagnies aériennes davantage
concernées par la réduction des coûts, s'orientent vers les
avions de nouvelles générations pour abaisser leurs coûts
d'exploitation et augmenter leurs performance opérationnelle.
La maintenance en aéronautique a donc
ravi sa part de ce changement brutal afin d'atteindre ces objectifs (la
sécurité, la disponibilité, le coût d'exploitation).
Mais ces dernier (objectifs) connaissent des problèmes qui agissent sur
le temps requis pour réparer les défaillances des systèmes
et permettre le retour en service de l'avion. Pour rectifier cette
situation c'est-à-dire résoudre ses
problèmes, le système embarqué de la maintenance vient
à ses buts, on a comme exemple :
· AIMS Aircraft
Information Management
Système du BOEINIG 777.
· Système
Centralisé de Maintenance
CMS d'A330/ A340.
Ce dernier (CMS) a été
inspiré d'un ancien système utilisé dans l'A320 dans les
années 80 c'est le CFDS (Centrelized
Fault Display System), et
AIRBUS a développé et utilisé ce système dans les
avions A330/A340. L'installation de ce système a posé donc les
bases de nouvelles normes en maintenance.
Comme tous les systèmes d'avions le
CMS à un computer qui le commande, c'est le CMC
(Centrelized Maintenance computer), cet ordinateur acquiert et traite
toutes les données de la maintenance, On le nome aussi le
Mouchard.
Alors, Quel est son rôle principal dans le
système CMS particulièrement et dans l'avion
globalement ? Est ce que le CMC a d'autres rôles ?
Lesquels ? Pourquoi on le nome le mouchard ? Est ce que l'installation du
CMC à bord d'un avion est essentielle ou non ?
Autrement dit quels sont leurs avantages ?
Pour tenter à répondre à
ses questions, mon plan de travail s'est décliné en quatre grands
chapitres :
1. La présentation de l'entreprise AIR
ALGERIE ainsi que l'avion A330-200
2. Comme l'OMS et le CMS ont
été déjà traités par la promotion de
l'année 2006, donc le deuxième chapitre va être un flash-
back ou bien un résumé sur ces derniers
3. le troisième chapitre sera l'analyse
complète de la problématique : qui nous a amené une
première sous partie à mettre le rôle principal du
CMC, l'architecture interne et externe de ce computer ainsi
que ces périphériques, et dans une seconde sous partie à
analyser l'exploitation du CMC dans la maintenance ou bien ces
rôles secondaires.
4. finalement dans le quatrième chapitre, on va
présenter un type de la maintenance qui
est la maintenance de ligne du CMC. Pourquoi ce
choix ? on va le voir.
En conclusion, on va essayer de répondre aux questions
posées précédemment par une conclusion
générale.
I.1 PRESENTATION DE L'ENTREPRISE « AIR ALGERIE
»
Le rôle essentiel de l'entreprise "Air Algérie"
dans l'activité économique est considéré dés
le lendemain de l'indépendance comme instrument privilégié
de l'exercice de la politique économique du pays qui devait permettre
à l'Algérie de développer et réaffirmer la
coopération commerciale et culturelle avec ses partenaires.
Du niveau national, la principale préoccupation des
pouvoirs publics consistait à promouvoir l'avion de façon
à répondre à de plusieurs aides géographique,
économique, sociaux et touristiques.
Elle a été en 1947, dans le but d'exploiter un
réseau dense et régulier de lignes aériennes entre
l'Algérie et la France.
Le 23 mai 1953 à la suite de la fusion de deux organismes
qui existait auparavant
la compagnie nationale de transport aérien "Air
Algérie" entra officiellement en activité. Dix ans plus tard, en
Février 1963, à la suite de l'indépendance de
l'Algérie, elle devient une compagnie nationale.
L'année 1971 est une date historique dans la vie de la
compagnie, venant de Seattle (U.S.A) deux Boeing 727-200 dotés d'un
perfectionnement technique et commerciale
par cette acquisition "Air Algérie" devient la
première compagnie en Afrique à utiliser des aéronefs
JET.
Toujours en 1972 en conformément à la politique
de récupération des ressources nationales Air Algérie"
devient une entreprise à 100% Algérienne, mais cette
Algérianisation n'a été effectivement et
définitivement réalisée qu'en 1974.
Grâce aux avions JET, le sud et l'extrême sud sont
désormais directement reliés au nord du pays alors qu'Alger
devient un carrefour aérien ouvrant la voie aux pays lointains d'Afrique
et d'Europe, avec lesquelles l'Algérie entretient des relations
économiques.
Le programme d'exploitation est par ailleurs judicieusement
étudié de telle façon à offrir le maximum de vols
à chaque ligne desservie dans le but de satisfaire le client sur les
deux réseaux exploités (domestique et international) et pour
répondre à la demande, la compagnie a du augmenter et diversifier
ses activités, ainsi le nombre d'avion est passe de 12 en 1970 à
42 en 1992.
A ce jour, AIR ALGERIE compte une flotte de 30
avions composée de :
BEOING 737-80010 Avions
BEOING 737-6005 Avions BEOING 737-2001 Avion BEOING 767-3003
Avions ATR 72 -5006 Avions
AIRBUS A330-2005 Avions
Voir l'organigramme 1 qui présente la direction
générale D'AIR ALGERIE
I.1.1 LA DIRECTION TECHNIQUE
Son rôle est d'assurer la sécurité et de
faire prolonger la durée de vie et d'exploitation des appareils de la
flotte
Elle est divisée en sous directions, comme nous montre
l'organigramme 2
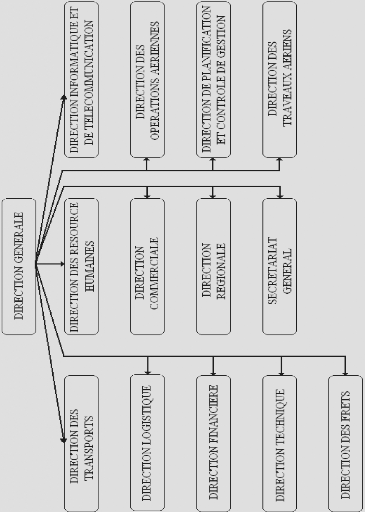
L'ORGANIGRAMME 1 : DIRECTION GENERALE D'AIR
ALGERIE
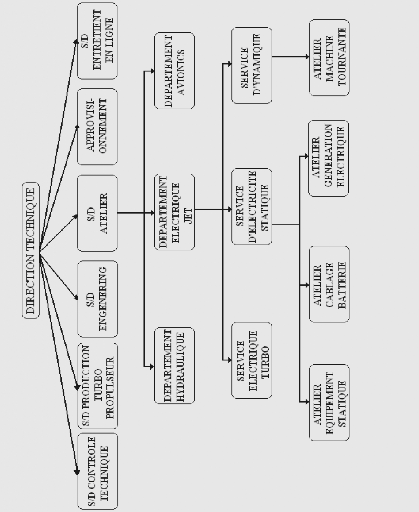
L'ORGANIGRAMME 2 : LA DIRECTION TECHNIQUE
II. 2 PRESENTION DE L'AVION A330-200
L'Airbus A330 est un avion de ligne long-courrier de moyenne
capacité construit par l'avionneur européen Airbus. Il partage
son programme de développement avec l'Airbus A340 avec la
différence qu'il s'attaque directement au marché des avions
biréacteurs. L' A330
partage avec cet appareil le fuselage et les ailes, fuselage qui
lui-même est en grande partie emprunté à l'Airbus A300 tout
comme le cockpit dont la conception est partagée avec l'A320.
Histoire
L'A330-200 a été développé
après le -300, il a effectué son premier vol en 1995.
Comparé au -300, il a un fuselage plus court de 5 mètres
(identique à celui de l'A340-200), ce qui se traduit bien sur par une
réduction de l'emport de passagers, mais l'emport de carburant est par
contre largement accru. L'autonomie y gagne 2000 km. Cet appareil répond
donc à la demande crée par la multiplication des vols directs
intercontinentaux, il répond au 767-300ER de Boeing
Les caractéristiques techniques de cet appareil sont les
suivantes :
Dimensions
Longueur58,8 m
Envergure60,3 m
Hauteur17,4 m
Aire des ailes361,6 m2
Masse et capacité d'emport
Max. à vide120 tonnes
Max. au décollage230 tonnes
Nombre de places295 en 3 classes à 335 en 2 classes
Motorisation
Deux General Electric CF6-80E1, ou Deux Pratt & Deux Whitney
PW4000 ou Rolls-Royce RR Trent 700
Poussée unitaire CF6 : 300,3 kN, PW4000 : 286,7 kN,
Trent700 : 302,5 Kn
Performances
Vitesse de croisière860 km/h
Vitesse maximale880 km/h
Vitessemach 0.86
Autonomie12500km (A330-200)/ 10500km (A330-300)

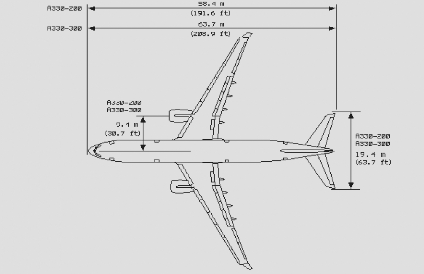
Figure I.1 : Dimensions de l'A330-200
II.1 INTRODUCTION
Dans un secteur en pleine mutation, soumis à une forte
pression économique et où l'externalisation des opérations
d'entretien continue à s'étendre, les activités de
maintenance
sont désormais de plus en plus externalisées afin
d'optimiser des politiques de réduction des coûts toujours plus
drastiques.
L'augmentation de la taille des avions ainsi que le
développent des systèmes électriques impliquent un fort
accroissement dans les besoins de la maintenance c'est pour cela que les grands
concepteurs d'aéronefs AIRBUS et BOEING font évoluer ses
systèmes pour accroître la sécurité, la
fiabilité et surtout la réduction du coût d'exploitation de
la maintenance.
L'un de ses systèmes est celui ; d'aide à la
maintenance embarquée l'OMS (On Board
Maintenance System), qui a été
mis en service sur les A320 dans les années 80, dans le but de minimiser
le temps et le coût d'entretien.
II.2 FONCTION PRINCIPALE DU SYSTÉME OMS
II.2.1. BUT ET COMPOSANTS DE L'OMS
Le but principal de l'OMS est de fournir une aide à
l'équipe de maintenance dans le but d'accomplir le diagnostic de pannes.
L'exécution de ce dernier est faites comme suit :
· Chaque système inclut le BITE «
Built in Test
Equipment » utilisé pour la
détection et l'isolation des équipements défectueux.
· un ordinateur central de maintenance
(CMC) acquiert et traite les données transmises par le
système BITE et les avertissements qui sont provenus pendant le vol.
· le résultat de ce diagnostic est
transféré aux opérateurs d'entretien à travers les
interfaces suivantes : imprimante, MCDU
(Multipurpose Control and
Display Unit), ACARS
(Aircraft Communication and
Reporting System) et le MDDU
(Multi Disk Drive Unit).
II.2. 2 L'ENVIRONNEMENT DU SYSTÉME OMS
L'acquisition, la consolidation, la récupération
et l'analyse de toutes les données à bord d'un avion s'effectuent
par quatre systèmes électroniques majeurs.
E/WD
SD
FDRS
ECAM
ACMS
CMC
Figure II.1 : Environnement du OMS
· ECAM : Electronic
Centralized Aircraft
Monitoring
· FDRS : Flight Data
Recording System
· ACMS : Aircraft
Condition Monitoring System
· CMS : Central
Maintenance System
1. ECAM : ce système affiche la panne
quand elle survient pendant le vol.
2. FDRS : l'installation de ce système
à bord des avions est obligatoire, pour enregistrer les
paramètres de vol, dans le but d'investiguer les incidents qui
surviennent pendant le vol.
3. ACMS : la performance de l'avion est
importante d'où la nécessité d'installer l'ACMS qui
enregistrer les paramètres significatifs et opérationnelles pour
les faire exploités dans le contrôle des moteurs et l'analyse des
problèmes spécifiques de l'avion.
4. CMS : c'est le système éminent
dans l'OMS, il enregistre les données de BITE et les
anomalies de tous les systèmes puis il les affiche sur le MCDU.
II.3 PRESENTATION DU SYSTEME CMS
I.3.1 ARCHITECURE DU CMS
Les composants du CMS sont placés dans le cockpit et dans
la soute électronique comme suit :
- BITEsla soute électronique - CMCsla
soute électronique
Et pour les Interfaces d'utilisateurs :
- 3 MCDUscockpit - MDDUcockpit
- Imprimantecockpit
- ACARSla soute électronique
CMS

MDDU
INTERFACE UTILISATEUR
SOUTE
ELECTRONIQUE
COCKPIT
BITESS
CMCS
3MCDUS
IMPRIMANTE
ACARS
FIGURE II .2 : Architecture du CMS
II.3.2 FONCTION PRINCIPALE DU CMS
Le CMS est basé sur un concept double :
1. Génération de données et intelligence
décentralisées.
2. Commande, stockage et affichage centralisés
Génération de données et intelligence
décentralisées faites par le BITE de chaque système en vol
(surveillance automatique et permanente) et au sol (possibilités d'essai
manuelles).
Commande, stockage et affichage centralisés sont faits
par le CMC et ces périphériques ; en vol
(emmagasinage automatique et permanent à l'intérieur du
CMC puis un affichage de pannes sur les
périphériques) et au sol (activation d'un essais
manuel où son résultat sera affiché sur les
périphériques, mais sans le stocker dans le
CMC).
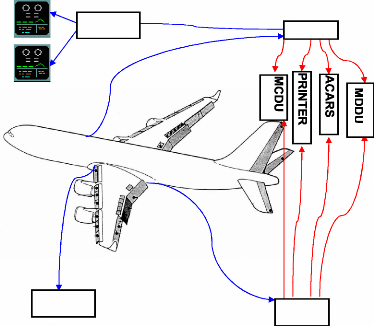
II.3.3 LES PERIPHERIQUES DU CMS
La transmission, le chargement, l'affichage et le tirage de
données de la maintenance s'accomplissent par les
périphériques du CMS qui sont :
- ACARS - MDDU -
Imprimante
- MCDU
II.3.2.1 ACARS
L'ACARS est employé pour transmettre ou recevoir,
automatiquement ou manuellement, des rapports ou des messages via une station
au sol.
Dans le cas du CMS, l'information de maintenance est
envoyée au sol où l'équipe d'entretien peut, selon les
conditions de contenu de rapport et les exigences aériennes:
Préparer les outils requis pour ramener l'avion en
état d'être exploité.
Traiter les données pour faire les statistiques
Contrôler les stocks de pièces de rechanges
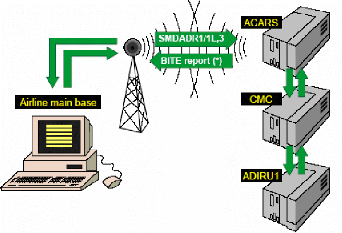
Figure I1.3 : Présentation de l'ACARS
II.3.2.2 MDDU
Le MDDU permet de charger des données à partir d'un
disque ou télécharger le rapport d'entretien du
CMC dans un disque.
On distingue deux modes d'utilisation de MDDU :
1. mode automatique : ou les transferts de fichier se
produisent sans aucune opération sur le MDDU. Le protocole de
transmission est initialisé quand le disque est inséré
dans le chargeur de données et quand le commutateur est placé
à CMC 1 ou à CMC 2.
2. En mode manuel : le téléchargement se produit
quand l'opérateur choisit la touche de DUMP (DÉCHARGE) sur le
MCDU.
Dans les deux cas, le disque doit être configuré
pour un usage de MDDU.

Figure 1I.4 : Présentation du MDDU
II.3.2.3 IMPRIMANTE
L'imprimante est conçue pour réaliser le tirage
des rapports qui viennent de divers systèmes tels que FMGES
(FLIGHT MANAGEMENT
GUIDANCE AND ENVELOP SYSTEM), CMS,
EIVMU (ENGINE INTERFACE AND
VIBRATION MONITORING UNIT ), ACARS
et ACMS.
Ce tirage est possible en vol ou au sol
Deux modes d'activation sont fournis :
1. Action manuelle : pour la commande d'impression de page
2. Contrôle automatique qui est programmée pour
:
Imprimer Le rapport après vol ; ce rapport est transmis
à l'imprimante quand le dernier moteur est arrêté.
Imprimer le Rapport de téléchargement ; à la
fin de l'opération du téléchargeant, un
rapport est automatiquement imprimé.
IMPRIMANTE


Figure II. 5 : Imprimante
II.3.2.4 MCDU
C'est l'interface la plus considérable dans le
système CMS car toutes les fonctions de ce dernier sont
gérées à travers le MCDU, il permet aussi
de dialoguer avec le CMC activé ou avec les
systèmes reliés au CMCs
MCDU

Figure II. 6: MCDU
II. 4 CONCLUSION
Comme il a été reporté dans la partie
précédente, dans chaque partie du système de l'avion le
BITE est destiné à la détection et
l'isolation des pannes, deux ordinateurs centraux et redondants
CMC1 et CMC2) centralisent et
mémorisant ces pannes, ils les ajoutent aux alarmes
générées par le FWCs, en plus de
l'information de défaillance produite par tous les systèmes de
l'avion.
Donc le CMC (Central
Maintenance Computer) est le
cerveau du système CMS qui mémorise les pannes
détectées par le BITE de chaque
système.
III.1 INTRODUCTION
traitements de données comme le FWS
(Flight Warning System)
commandé par le FWC (Flight Warning
Computer) et le CMS par le
CMC.....etc.
Le CMC est donc le cerveau du CMS et ses
ensembles, la majorité des pannes détectées sont
traitées par ce dernier.
En outre, on le nome le mouchard car il épie toutes les
opérations fausses qui sont effectuées par l'équipage dans
le cockpit pendant le vol.
III.2 LE ROLE PRINCIPAL DU CMC
Deux ordinateurs de maintenance centraux et redondants
(CMCs) sont utilisés dans le système de
maintenance embarqué.
L'objectif du CMC est de centraliser et
stocker toutes les informations de maintenance fournies par le système
BITE. Ces informations peuvent être lues par le personnel de maintenance
sur le MCDU. En plus, de MCDU et un seul CMC, l'équipe
de maintenance peut exécuter les essais de tous les équipements
dans le but de confirmer l'information de panne.
III.2.1 L'emplacement du CMC
Le CMC est localisé dans la soute
électronique, comme montre la figure ci-dessous
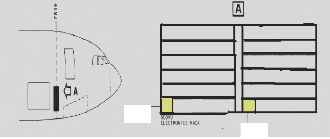
1TM2
CMC2
1TM1
CMC1
Figure III.1 : Localisation du CMC
III.2.2 Architecture Externe du CMC III.2.2.1
Architecture du CMC

Figure III.2 : Architecture du CMC
III.2.2.2 caractéristiques principales
· Les dimensions : voir la figure
III.3 Longueur = 386mm (15.196in)
Largeur =157.2mm (6.1308in)
Hauteur = 193.5mm (7.716in)
· Poids : Moins de 6.9Kg
III.2.2.3 caractéristiques
environnementales
a- Température
- Température d'exploitation : de - 15c° à
70c° (-5F° à 158F°)
- Température de survie au sol : de -55c° à
85c° (-67 F° à 185 F°)
b- Altitude- Pression
- altitude maximale : 10660m (35000ft).
- pression minimale : 0.23 84 bar (3.4577psi).
Le CMC est installé dans une zone
pressurisée.
c- Humidité
Le CMC peut supporter un environnement avec une
humidité normale et relative de 95% à +50c°.
III.2.3 Décomposition du Hardware du CMC
(matériel de traitement de l'information) Le
CMC contient :
1. carte de source d'alimentation
2. carte CPU (Central Process
Unit)
3. Deux cartes d'ARINCs (ARINC 1,2)
4. carte d'input / output
5. Ensemble de câble :
· LSP (lightning Strike
Protection) / module interne (carte de LSP, carte interne)
· Carte d'extension LSP
Chaque carte s'adapte avec le corps de l'équipement par
des connecteurs, La localisation des cartes dans le CMC est
montrée dans la figure III.5
III.2.4 Le module OBRM
Le CMC contient aussi un module
OBRM (On Borad
Replaceabale Module), ce module est en
conformité avec les exigences de conception communes aux fabricants
d'équipement divers :
Mettre en contact via l'arrière pour permettre le
remplacement de l'équipement sans le désinstaller.
Mécanique intégrable prévient
l'installation incorrecte de module.
III.2.4.1 Dimensions du l'OBRM : voir
figure III.4 Longueur: 78.3mm (3.08in)
Largeur : 14.4mm (0.56in)
Hauteur: 108.0mm (4.25in)

Figure III.3 : Dimensions du CMC
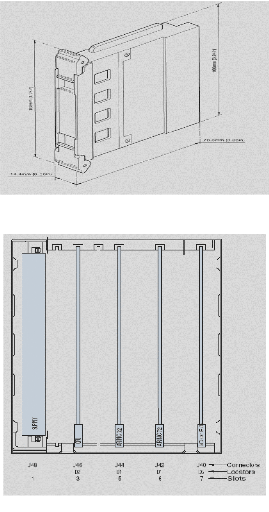
Figure III.4 : Dimensions du l'OBRM
Figure III.5 : Localisation des cartes
III.2.5 les connexions internes et externes des cartes
Il y a deux types de connexions des cartes internes et externes,
comme il est montré dans les figures III.6 et
III.7 : (avec A, B, C, D, E, F dans la figure III-6
sont des pins de connexions
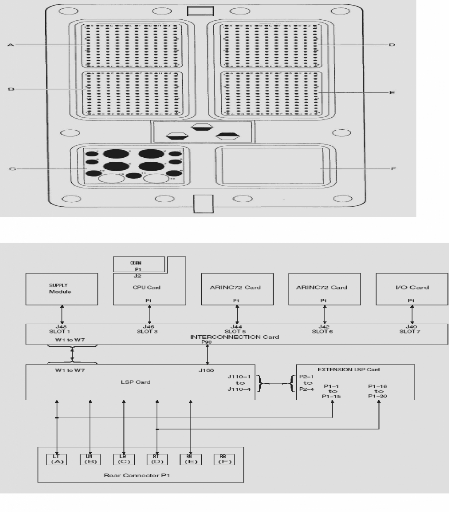
Figure III.6 : connexion externe
Figure III. 7 : connexion interne
III.2.5.1 La commutation de différentes cartes Est
répartie comme suit :
· commutation automatique dans la carte d' I/O
· commutation manuelle (P/B bouton) dans la carte
d'interconnexion
· relais de commutation dans le panneau de LSP Le
schéma suivant montre cette répartition :

Figure III.8 : La commutation des cartes
III.2.6 Décomposition du software (logiciel) du
CMC
Le software du CMC est défini comme suit
pour assurer son bon fonctionnent :
Le management double du fonctionnement, contrôle le
déroulement interne de l'ordinateur pour ceci le logiciel examine :
- chaque événement externe (coupe de puissance,
remise manuelle,...)
- événement interne (interruption de
matériel,...)
- chaque événement de configuration (commutation,
pin programming)
- les reconfigurations possibles en fonction des pannes
détectées par le « BITE et l'autotest »
- paramètres généraux et le mode de
fonctionnement opérationnel
- exécuter les checks cycliques pour éviter le
dysfonctionnement et les problèmes dus par les autres systèmes
le mode normal contrôle le traitement et le stockage de
:
· l'information de panne transmise par le BITE des
systèmes reliés au CMC,
· l'information d'avertissement transmise par le FWCs.
- Ce traitement consiste à regrouper toutes les
informations de pannes ou d'alarmes
- Ce stockage consiste à arranger ces informations pour
les présenter aux opérateurs de maintenance via le MCDU, ACARS,
l'imprimante.
le mode interactif contrôle les interfaces d'utilisateurs
:
Les connexions avec les deux MCDUs et l'échange avec les
BITEs de système (au sol seulement) sont autorisés :
· le management d'échange
· le management de commande d'opérateurs
· l'arrangement des rapports la commande
d'opérateurs
· le roulement des pages du MCDU
· le management d'ACARS et d'imprimante. Le mode I/O
(input/output) regroupe les fonctions associées au management de I/O et
le protocole de communication :
· acquisition et transmission de l'information (DG -digital
I /O, DS- discret I/O)
· protocole de management pour le MCDU, ACARS,
systèmes.....
autotests : s'effectuent quand l'avion est au sol.
pannes assurent les traitements suivants :
· analyse et stockage de panne concernant le
CMC et les autres systèmes
· transmission et sous- traitance des messages de pannes
vers les deux CMCs
· le management d'échange entre le BITE et les
opérateurs de maintenance à travers le CMC
master.
Reset
Application du logiciel
|
auto essai logiciel
|
|
|
|

Panne
Mode normal Input/
Mode
interactif
Fonctionnement
Out put
Auto test
Figure III .9 : Diagramme du software
Il est important de définir le BITE
avant de continuer la présentation du fonctionnement et
l'opération du CMC.
Alors c'est quoi le BITE ?
On a dit que le CMC centralise et stocke toutes
les informations de la maintenance fournies par le système BITE.
III.2.7 le BITE « Équipement
d'essai incorporé »
Chaque système est composé du LRUs « line
remplaceable unit »
ou « élément remplaçable en escale
», qui peut être : calculateur, capteur, actionneur (vérin),
sonde, etc.
Avec la nouvelle technologie, la plupart de ces LRUs sont
contrôlés en permanence par des calculateurs numériques ,et
pour des raisons de sécurité, dans chaque système une
partie du calculateur est consacrée pour ces fonctions elle s'appelle:
Built In Test
Equipment.
III.2.7.1 Caractéristiques du BITE
détection des pannes qui affectent le système
(permanente ou intermittente) identification des pannes au niveau du LRU
distinction entre les pannes (internes) du système et
les pannes d'interfaces de l'avion (externes)
mémorisation de l'information de la maintenance (en vol
et au sol)
transmission des données de maintenance vers les 2
CMCs
l'échange entre le CMS et ces interfaces pour les
opérations de tests.
III.2.7.2 Fonctionnement du BITE
On a dit précédemment que pour accomplir le
diagnostic d'une défaillance chaque système inclut so propre
BITE, qui fait la détection, l'isolation et la mémorisation des
pannes. -détection:
Si la panne est survenue elle est permanente (consolidée)
ou intermittente (discontinue) -isolation:
Après la détection d'une anomalie, le BITE est
capable d'identifier le défaut au niveau du LRUs et donner un flash
(snapshot) instantané dés que la panne survienne.
-mémorisation:
Toutes les informations de la maintenance et du dépannage
sont mémorisées dans une mémoire non volatile (NVM).
Remarque
Les pannes détectées par le système BITE
sont classifiées dans trois catégories (classe 1, 2, 3) eu
égard à leurs conséquences sur la sûreté et
la disponibilité de l'avion (on va les voir dans le chapitre de la
maintenance).
Figure III.10 : schématisation du
BITE
III .2.8 Les différents types de connexions
externes
Le CMC est connecté avec les autres
systèmes par :
· Input digital (DGI)
· Output digital (DGO)
· Input discret (DSI)
· Output discret (DSO) III .2.8.1 inputs/outputs
digitaux
Ce type de input/output est fait par l'ARINC 429 Alors
C'est quoi l'ARINC 429 ?
III .2.8. 1.1 Description
L'ARINC 429 est les plus anciens bus avionique
.développé par l'Aeronautical
Radio INCorporation en 1977, il est encore
utilisé aujourd'hui sur des nouvelles plates formes même si
d'autre bus plus récents sont fréquemment retenus.
Ce bus est un bus de données simple utilisant un seul
émetteur et de 1 à 20 récepteurs par bus. On le retrouve
dans des avions tels que les AIRBUS A310/320 et A330/A340, dans
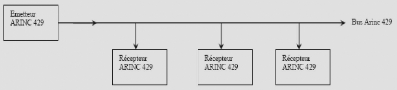
Figure III.11 : Architecture du bus ARINC
429
III .2.8.1.2 Support physique
Il s'agit d'une structure point à point. La
communication est unidirectionnelle et pour une communication bidirectionnelle
entre les systèmes, on utilise deux bus, un dans chaque direction. Un
bus ARINC 429 utilise deux fils pour transmettre un encodage bipolaire avec
retour à zéro. Les mots de 32 bits sont séparés par
4 bits- time NULL, il n'y a donc pas besoin d'un 3ème fil pour le signal
d'horloge. Le bus unidirectionnel utilisé s'appelle DITS ce qui signifie
: Mark33 Digital Information Transfert System. C'est une paire
torsadée.
Le bus ARINC 429 supporte deux types de débit : un
haut débit de 100Kbps pour les `hautes' données (1% des
données) et un faible débit variant entre 12Kbps et 14,5Kbps pour
les `basses' données.
III .2.8.1.3 Niveau de liaison
les données sont transférées sur les bus
séries ARINC 429 par des mots de 32 bits. Chaque mot est
séparé par un `trou inter-mots' de 4 bits (bit-time).
Nous sommes ici dans le cas d'une liaison point à
point, donc le système de contrôle est aussi point à point.
Trois protocoles sont définis dans ARINC 429 pour les données
numériques, discrètes ou fichiers.
Les transferts de données numériques ou
discrètes sont effectuées en utilisant un champ SAL (System
Address Label) unique pour identifier la donnée contenue dans chaque
mot.
Les transferts de fichiers de données sont
effectués par le protocole Bit-Oriented ou Williams burg. Dans ce
protocole, la source initialise les communications en envoyant des codes
pré- définis. Si un transfert Bit-Oriented est
désiré, la source enverra le mot code `ALO'. Si le
récepteur peut recevoir les données, il répond avec `ALR'.
Dans la plupart des cas, un message consiste en un mot de donnée. Le
label définit le type de donnée du mot. Le Bit de parité
permet de vérifier la validité de la transmission (en
vérifiant qu'un bit ne s'est pas perdu).
Format des mots :

- Bits 18 label (étiquette) : identifier le type de
donnée 256 combinaisons avec 8 bits
Avion 700 étiquette
- Bits 9 et 10SDI (source/destination
identifier)
- identificateur source/destination
- code de direction
- Bits 1129 data (champs de données)
- Bits 30 et 31SSM (sign status matrix) :
identification des paramètres : Direction, signe, valeur, nord, sud,
etc...
- Bits 32bit de parité (impaire) : test et contrôle
la validité de transmission de données Le status du SSM est comme
suit :
Fw : l'équipement détecte la
panne
NCD : donnée non calculée
FT: permet de tester l'état de
l'équipement
NO: fonctionnement de l'équipement est
correct
N° de bit
|
|
31
|
30
|
Désignation
|
0
|
0
|
Failure warning ( FW)
|
0
|
1
|
No computed data(NCD)
|
1
|
0
|
Functional test(FT)
|
1
|
1
|
Normal operation(NO)
|
|
Exemple : comm. VHV, étiquette 030
Parité
|
SSM
|
|
|
|
|
|
|
Données
|
|
|
|
|
|
|
|
|
|
|
SDI
|
|
étiquette
|
|
|
|
32
|
31
|
30
|
29
|
28
|
27
|
26
|
25
|
24
|
23 22
|
21
|
20
|
19
|
18
|
17
|
16
|
15
|
14
|
13
|
12
|
11
|
|
10
|
9
|
8 7
|
6 5
|
4 3
|
2 1
|
|
1
|
0
|
0
|
0 1
|
0
|
|
1
|
0 0
|
0
|
|
0
|
1 0
|
1
|
|
|
0 0
|
1 1
|
|
|
0 0
|
0
|
0
|
0 0
|
|
000
|
|
110
|
0
|
0
|
|
10M Hz 1MHz 100 kHz 10 kHz kHz 0 0 3 0

2 8 5 3 0
La fréquence = 128.530 (le 1 est
implicite).
De par la simplicité de sa topologie et des protocoles
utilisés, ce bus est d'une très grande fiabilité. Et comme
il n'y a qu'un seul émetteur par paire de fils, l'ARINC 429 est bien
évidemment déterministe.
Mais comme la transmission et la réception se font sur
des ports séparés, le nombre de fils entre les différents
systèmes de l'avion est très élevé.
Les schémas suivants montrent les différents DGO
et DGI d'ARINC 429 selon leurs connexions aux CMCs :
DGI de système BITE de type 1et 2 :

Figure III.12 : DGI de système BITE
(1,2)
DGO des bus de communication (C1, C2et C3) :
Permet de dialoguer avec le CMC actif
Le bus d'Arinc 429 utilisé est de type LS (low speed)
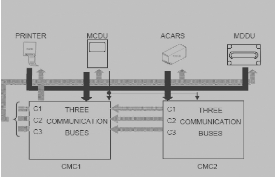
Figure III.13 DGO des bus de communication
DGO des bus de maintenance (de M1 jusqu'à M6)
:
Tous les systèmes utilise le bus d'Arinc429 LS sauf : le
FWC, BSCU «Brake System
Control Unit » EIVMU « » en HS
(high speed)
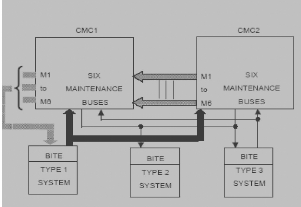
Figure III.14 : DGO des bus de maintenance
DGI/DGO de bus X-talk (cross talk ou
l'intemodulation) : Le bus d'ARINC 429 est de type HS.

Figure III.15: Bus d'intermodulation (cross
talk)
III.2.8.2 Inputs/Outputs discrets
Les signaux discrets dans l'avion sont alimentés avec 28V
ou avec la masse (GND ,0V), à l'aide du bouton poussoir.
Le CMC acquiert et traite DSI
d'un seul type GND/OC (GND/circuit ouvert), constitue et génère
DSO de type (GND/OC).
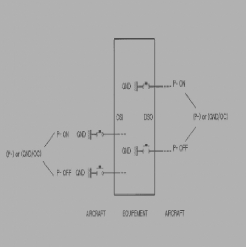
Figure III.16: les I/O Discrets
C'est pour cela que Les systèmes dans l'avion sont
divisés en 3 types, dépendent de leurs capacités de
mémorisation et leurs types de connexions avec les deux
CMCs.
III.2.8.3 Différents types de système
1. Systèmes de type 1
Un système de type 1 est caractérisé par le
bus input/output d'ARINC 429.
Ces systèmes ont:
La capacité de mémoriser les anomalies
détectées pendant les derniers 64 vols.
Ceux-ci assurent la transmission permanente à leur bus de
sortie d'une partie mémoire contenant l'identité du LRUs qui a
échoué pendant le dernier vol.
Ce type permet au sol le dépannage approfondi et le test
d'interaction.
Il y a trois configurations concernant ce type :
1- un seul ordinateur : directement connecté au
CMC

2- ordinateur concentrateur : ordinateur concentré
à la maintenance, directement connecté au CMC
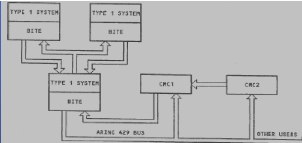
Figure III.18 : syst. de type 1avec 1 CMC
concentrateur
2. deux ordinateurs : 2 sous -systèmes connectés
au CMC
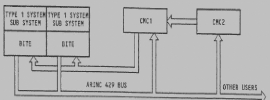
Figure III.19 : syst. de type 1avec 2 CMCs
2. Systèmes de type 2
Un système de type 2 est caractérisé par le
bus input/output d'ARINC 429 et inputs/outputs discrets.
Ces systèmes ont:
- La capacité de mémoriser les anomalies
détectées pendant le dernier vol.
Ceux-ci assurent la transmission permanente à leur bus de
sortie d'une partie mémoire contenant l'identité du LRUs qui a
échoué pendant le dernier vol

Figure III.20 : syst. de type 2
3. Systèmes de type 3
Un système de type 3 est caractérisé par
inputs/outputs discrets. Ces systèmes dénotent leur état
(valide ou invalide). Le CMC principal peut enclencher
(actionner) leur tests ou les prérégler

Figure III.2 1 : syst. de type3
III.2.8.4 La liaison ATEC
Il y a une liaison série aux normes RS 232* entre
l'ordinateur (CMC) sous test et l'ATEC
(Automatic Test
EQuipment), Ce type de liaison n'est pas utilisé dans
l'avion.
Les liaisons séries permettent la communication entre
deux systèmes numériques en limitant le nombre de fils de
transmission.
III.3 Architecture Interne du CMC
On a dit précédemment que Le CMC
contient: carte de source d'alimentation
carte CPU (central process unit)
Deux cartes d' ARINCs (ARINC 1,2) carte de input/ output
un module d' OBRM
Ensemble de câble
III.3.1 La carte CPU
Cette carte accomplit la fonction de CPU (unité centrale
de traitement). Ceci a des interconnexions avec d'autres cartes par l'autobus
d'ECSB (Embedded Computer
System Bus), elle est structurée
autour d'un microprocesseur 80386 et exécute les fonctions suivantes
:
· gestion de système
· génération des signaux d'ARINC 429
· gestion de panne de courant
· gestion de lien avec l'ATEC
· Interface d'ECSB
L'architecture interne de l'ordinateur est basée
autour d'une communication d'ECSB entre chaque carte. Cet autobus (autobus
incorporé de système informatique) est sous la commande de la
carte d'unité centrale de traitement :
· 21 lignes de l'adresse, 32 lignes de données, 15
commandes de signaux
· Modes synchrone et asynchrone
La carte CPU est répartie en plusieurs parties qui ont
les fonctions suivantes :
1. Le coeur du CPU
· 16 Mhz du microprocesseur 80386* (voir
annexe)
· Chip (circuit intégré) 82380
· Contrôle logique
2 Le Monitoring (watchdog* ) voir annexe
· L'activité de contrôle
· L'accès de contrôle
3 Espace de stockage
· espace RAM (265 Ko)
· espace EEPROM (32 Ko).
4 interface d'ECSB
5 ports
· port de position
· port de contrôle
6. inputs/outputs
· liaison d'ARINC 429 LS
· liaison d'ARINC 429 HS
· liaison série RS 232 asynchrone.
III .3.2 La carte I/O
Les fonctions principales de la carte d'I/O sont :
· acquisition des entrées discrètes DSI
· génération des sorties discrètes
(DSO)
· génération des sorties d'ARINC 429 (DGO)
· génération du code de transmission par la
carte d'unité centrale de traitement .
· management de la commande interne de la commutation
CMC1/CMC2 (fonction de commutation
interne)
· support d'extension de la carte mémoire de CPU.
- espace RAM (256 Ko)
- espace EEPROM (256 Ko).
III.3.3 La carte d'ARINC
Chaque carte d'ARINC effectue l'acquisition de 72 autobus d'ARINC
des systèmes.
Ces cartes sont accessibles dans le mode écriture et
lecture à travers l' ECSB. La fonction principale de la carte d'ARINC
est :
- réception des messages d'ARINC
- sélection des messages d'ARINC
- traitement des mots d'ARINC choisis
- restitution des mots d'ARINC pour la carte CPU
III.3.4 La carte d'alimentation
Cette carte fournit ,11 5V/400 hertz de l'avion, les
tensions DC Suivantes :
- +5 VL (5 v logique)sections logiques - +5 VR (5 V RAM)RAMS
- +15 VA/ - 15VA (analogique)circuits analogiques.
Elle contrôle aussi la coupe d'alimentation, surtension et
sous tension.
Ceci produit de 9 signaux de commande
- ACFAIL : indique un échec d'A/C 115 V/400 hertz
- STORAGE : détecte la réservation d'énergie
de modules
- CFAULT : indique si les tensions d'output sont trop basses ou
hautes
- PFIN : interruption de panne de courant - INIT :
initialisation
- PFEV : événement de panne de courant
- LPFEV : long événement de panne de courant
- RESOR : origine d'init (automatique ou manuelle)
- SAV : contrôle maintenu 5 par VR après une coupe
de puissance.
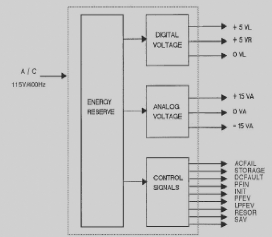
Figure III.22 : Carte d'alimentation
III.3.5 Le module OBRM
Module de mémoire 32 bits, incorpore le software
opérationnel de la carte CPU. Il contient :
- espace EPROM 512 (Ko)
- dispositif d'identification
- Indication de présence.
III.3.6 Ensemble de câble
Assure l'interface entre les différents montages partiels
d'ordinateur et l'avion. Ceci se compose de :
- support arrière de connecteur
- carte d'interconnexion
- la carte LSP (Lightnig
Strike Protection)
- carte LSP d'extension
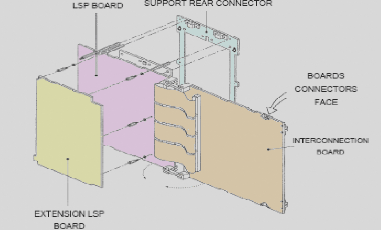
Figure III.23 : Différents composants d'ensemble
de câbles
La carte de LSP assure :
- les interconnexions entre l'environnement externe et la carte
d'interconnexion - protection contre les surtensions
- support de commutation des relais
La carte d'interconnexion assure :
- interconnexions entre la carte LSP et les
cartes fonctionnelles du CMC - l'appui et l'adaptation de
l'ECSB,
- génération de la commande de commutation de
relais de carte LSP La carte d'extension LSP
complète la protection contre les surtensions.
Le schéma suivant nous montre la communication entre les
cartes :

Figure III.24 : La connexion entre les cartes III.4
L'alimentation du CMC
III.4.1 Source d'alimentation
28 VDC est utilisé pour activer les relais
situés dans le CMC1, ces relais assurent la fonction de
commutation, c'est-à-dire, ils permettent au CMC2
d'être connecté aux systèmes par le CMC
1.
115 VAC est utilisé pour alimenter l'ordinateur.
Le CMC1 est alimenté par le
réseau principal en vol. cette bar bus permet aussi d'effectuer les
actions de maintenance au sol, quand seulement l'APU est en marche (groupe de
parc d'énergie au sol n'est pas disponible).
III.4.2 Consommation et facteur de puissance
- facteur de puissance > 0.85
-la puissance de consommation:1 15VAC90VA et 28VDC15W (pour
l'activation de relais)
III.4.3 Localisation des disjoncteurs (C/B)
Le tableau suivant montre les disjoncteurs utilisés par le
système:
|
panneau
|
désignation
|
FIN
|
localisation
|
|
721 VU
|
Test PLUG 1
|
7TM
|
R 11
|
|
721 VU
|
CMC 1 SWTG
|
4TM 1
|
U07
|
|
722 VU
|
CMC 2
|
3TM 2
|
D 45
|
|
722 VU
|
Test PLUG 2
|
6TM
|
Q 42
|
|
722 VU
|
CMC 2SWTG
|
4TM 2
|
W 40
|
|
742 VU
|
CMC 1
|
3TM 1
|
N 72
|
III.5 LA FONCTION SECONDAIRE (RÔLE) DU CMC
La fonction principale du CMC est de centraliser et
mémoriser les alarmes générées par le FWC et les
messages de pannes produites par le BITE de chaque système. En plus de
son rôle principal, le CMC assure les fonctions suivantes :
Transmission de paramètres généraux
Dialogue avec le BITE
Interface d'utilisateurs
Le management du computer
La fonction interactive
L'usage de maintenance facultatif (optionnel)
III.5.1 Transmission de paramètres
généraux
III.5.1.1 Définition
Les deux CMCs sont connectés aux
différents systèmes de l'avion qui fournissent les
paramètres généraux et rendent possible l'identification
des pannes. Ces paramètres sont acquis par les 2 CMCs
et retransmis par l'un des deux vers les systèmes de type 1 pour
l'élaboration des messages de pannes.
Il y a deux catégories de paramètres
généraux :
Les paramètres évolutifs : qui peuvent
être modifiés pendant le vol (phases de vol, phases de
maintenance, conditions vol/sol, la date, configuration de
l'avion, la clock de secours.
Les paramètres non évolutifs : qui sont stable
pendant le vol (identification de l'avion, numéro de vol, city
pair« FROM/TO ».
III.5.1.2 Phases de vol
Chaque vol inclut 10 phases
1. power-onalimentation -ON
2. engine startdémarrage moteur
3. taxi outroulage départ
4. take-off rolldécollage roulement
5. climbmontée
6. cruisecroisière
7. approachapproche
8. rolloutdécélération
9. taxi inroulage arrivée
10. engine shut downarrêt moteur

Figure III.25: phases de vol
Le CMC est l'interface entre le FWC et le
système BITE concernant la phase de vol, il accomplit à chaque
seconde le traitement chronologique suivant :
Acquisition, contrôle et transmission de la phase de vole
du FWC1
Si cette valeur n'est pas valide, l'Acquisition, le
contrôle et la transmission de la phase de vole du FWC2
si cette valeur reste invalide, le CMC envoie
la dernière acquisition de la phase de vol valide.
Si la panne apparaît durant l'acquisition initiale (suite
à une coupure de courant>300ms), le CMC envoie donc
la valeur défaillante « 01 ».
Nota: les phases de vol sont envoyées sur
les bus M1M6 et C1C3 avec le sign status matrix-SSM- toujours encodé NO
(Normal Opération).
III.5.1.3 Les phases de maintenance
Le CMC élabore les phases de maintenance
indépendamment des phases de vol pour l'attention de tous les
systèmes de type 1.
Ces phases indiquent si le CMC doit
mémoriser les messages envoyés par le BITE. Les données
doivent être mémorisées en dessous du LEG condition
seulement (LEG phase § maintenance flight phase).
Les phases de maintenance sont supputées et transmises par
le CMC chaque 120 ms.
Le CMC traite aussi la dégradation des
vols comme :
accélération / stop
vol après l'accélération / stop
touch and go (pose décolle)
angine run-up « essais au sol » (point fixe)
Remarque :
La condition de maintenance de vol (LEG) est localisée
entre la mise en marche du premier moteur plus de 3 mn pour A330 (le 3eme
moteur plus de 3mn pour A340), si le plan de vol est valide dans le FMS, ou la
vitesse supérieur à 80Kts si le plan de vol n'est pas valide, et
la vitesse inférieur à 80 Kts plus de 30s, pendant le roulement
après touch down (toucher des roues).

Figure III.26 : localisation du LEG
III.5.1.4 Conditions FLIGHT/ GROUND (vol/sol)
- Pour les systèmes de type 1, la condition
FLIGHT/ GROUND est donnée par les phases de
maintenances envoyées aux systèmes par le CMC dans les bus C et M
, étiquette 227.
La condition FLIGHT est encodée par l'état du LEG
(informatique du CMC). La condition GROUND est encodée par l'état
en sol (informatique du CMC)
Nota : la procédure du la
MEL*(voir annexe) permet l'avion de voler avec 2
CMCs
défectueux (on va le voir par la suite), dans ce cas, le
système de type 1 ne peut pas utiliser
l'état du leg /ground
supputé par le CMC. Pour savoir la condition vol/ sol,
ces systèmes
utilisent les paramètres d'avion directement reçus
dans leurs entrées exp : train d'atterrissage comprimé.
- Pour les systèmes de type2 et 3, ces systèmes
élaborent leurs propres conditions vol/sol par conséquent leur
management du LEG par l'utilisation d'un ou plusieurs données de
configuration de l'avion, Exp: discrets de landing gear et / ou les moteurs.
Dans ce cas le CMC constitue une la condition FLIGHT/ GROUND
retardé, en utilisant la donnée depuis EIVMU
(ENGINE INTERFACE AND
VIBRATION MONITORING UNIT),
RA (RADIO ALTIMTER),
LGCUI (LANDING GEAR
CONTROL INTERFACE UNIT).
Flightaprès TO décollage (train
avant étendu par le démarrage moteur+ 45s de confirmation)
Groundtrain d'atterrissages comprimé.
III.5.1.5 Le temps et la date
Dans l'opération normale, le temps et la date sont
acquis, vérifiés et validés dans chaque seconde depuis la
clock (horloge) principale.
Le CMC transmet ces paramètres à
l'ECAM, système de type 1et au CMC opposé
à travers les bus M, C et X-talk.
Nota
- Le CMC envoie le temps dans les bus M1M6 et
C1C3 à travers l'étiquette 125, (et pour la date
l'étiquette 260) avec le SSM encodé toujours NO
- Le CMC envoie le temps dans le bus X-Talk
à travers l'étiquette 125, (et pour la date
l'étiquette260) avec le SSM encodé toujours NO ou NCD (no
computed data).

ECAM
SYSTEME
Figure III.27 : la clock de
secours
Dans l'opération anormale, deux cas peuvent survenir :
1. si la montre tombe en panne, le temps et la date sont
automatiquement élaborés par la montre de secours interne du
CMC master. Ceci est activé après une minute
d'imperfection.
2. si la montre est inexacte, et si les CMCs
sont affectés par la coupure de courant, les valeurs par défaut
sont donc, 01 JAN 00 pour la date et 40.00.0 pour le temps. La date et le temps
peuvent être mis à jour à travers l'initialisation manuelle
sur le MCDU (« UTC/DATE INIT » prompt).
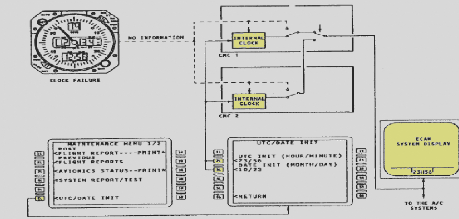
Figure III.28 : Initialisation du temps
III.5.1.6 Configurations de l'avion
Ce paramètre est formé par :
software pin programming data
(ADIRUAIR DATA INERTIAL
REFERENCE UNIT,
AMUAUDIO MANAGEMENT UNIT,
FWC,SDACSYSTEM DATA
ACQUISITION CONCENTRATOR)
hardware pin pro gramming data
les données reliées à l'état du
computer (CMC, MCDU, clock.)
Ceci est utilisé par l'état de l'équipement
du système : installé/ non installé, valide/non valide.
Toutes ces données sont acquises, vérifiées
et validées dans chaque seconde, et transmise aux bus M, C et X-talk
Nota :
- Le CMC transmet la configuration avion dans
les bus M1M6 à travers les
étiquettes 155 et 156 et C1C2
à travers les étiquette 157,161 et 162, dans le bus
- du MDDU à travers les étiquettes 156 et 157 avec
SSM encodé NO.
- Le CMC transmet la configuration avion dans le
bus X-talk à travers les étiquettes 155, 156, 157, 161, et 162
avec le SSM encodé toujours NO / NCD.
- Le CMC transmet le code de l'équipement
dans les bus M1M6, C1C3 et Xtalk à travers l'étiquette 337 avec
SSM encodé NO.
Le CMC envoie dans chaque seconde
l'avertissement de classe 2 du FDIU
(FLIGHT DATA
INTERFACE UNIT), DMU
(DISPLAY MANAGEMENT UNIT) et
du CMC lui-même. Pour cela, il acquiert
(CMC) la configuration de l'étiquette de ses
systèmes et constitue une étiquette commune (étiquette
270) Cette étiquette est transmise ensuite au FWC et le CMC
opposé.
Nota
Le CMC transmet ce paramètre dans les bus
M1M6à travers l'étiquette 270 avec SSM encodé NO.
Le CMC transmet ce paramètre dans le bus
X-talk à travers l'étiquette 270 avec SSM encodé NO ou
NDC.
III.5.1.8 Identification A/C, Flight Number (numéro
de vol), City Pair (From/To)
Identification de l'avion (A/C) :
- acquise, vérifiée et validée chaque 4 s
(depuis le FDIU)
- 7 caractères
- FDIU fautla dernière identification valide de A/C
(valeur EEPROM)
Si un nouveau CMC est installé, la
valeur de EEPROM indisponible :
7 tirets.
Nota
- Le CMC envoie l'IDENT A/C dans les bus M1M6
à travers les étiquettes 301, 302, 303,304
- Le CMC envoie l'IDENT A/C dans les bus C1C3
à travers les étiquettes 301, 302,303
- Le CMC envoie l'IDENT A/C dans le bus X-talk
à travers les étiquettes 301, 302, 303,304
Flight Number :
Acquis, vérifié et validé chaque 5s (depuis
FMGEC - FLIGHT MANAGEMENT
GUIDANCE AND ENVELOP
COMPUTER
- 10 caractères
- FMGEC fautle denier numéro de vol
valide
La valeur défaillante : 10 tirets
- le CMC envoie le N° de vol dans les bus
M1M6 et C1C3 à travers les étiquettes 233237 avec SSM
encodé toujours NO
- le CMC envoie le N° de vol dans le bus
X-talk à travers les étiquettes 233237 avec SSM encodé
toujours NO ou NCD
City pair (from / To) :
- acquis, vérifié et validé chaque 3 s
(depuis le FMGEC)
- 8 caractères
- FMGEC fautle denier city pair valide
La valeur défaillante : 8 tirets
Nota 2 :
- le CMC envoie la City pair (from/ To) dans les
bus M1M6 et C1C3 à travers l'étiquette 40, 41,42 avec SSM
toujours encodé NO
- le CMC envoie la City pair (from/ To) dans le
bus X-talk à travers l'étiquette 40, 41,42 avec SSM toujours
encodé NO ou NCD
III.5.2 DIALOGUE AVEC LE BITE
III.5.2.1 Modes d'opération
Le CMS s'opère en deux modes principaux
mode normal
mode interactif
Dans le mode normal, les CMCs reçoivent et enregistrent
:
- les messages de pannes transmis dans le temps réel par
chaque BITE du système. - messages d'avertissements d'ECAM transmis dans
le temps réel par les FWCs.
Le mode interactif, est valable seulement au sol et il est
activé après la réception d'un ordre d'opérateur.
Ceci permet de connecter chaque système BITE avec le MCDU (à
travers le CMC), dans le but d'initier le SYSTEM TEST, ou
afficher le rapport du BITE
III.5.2.2 Le mode normal
Ce mode est basé sur la mémorisation des
données de défaillance en permanence dans un temps réel.
Cette mémorisation est réalisée par les systèmes et
aussi par les CMCs.
Ce mode inclut :
· pour le BITE de système :
- surveillance, détection et l'isolation de panne en
permanence.
- La mémorisation de données de maintenance
- Transmission permanente aux CMCs.
· Pour le CMC :
- Lecture de tous les bus et les discrets de systèmes
- Sélection et mémorisation des messages
correspondants
Les figures suivantes vont nous montrer la différence de
ce type de dialogue avec les 3 types de systèmes :
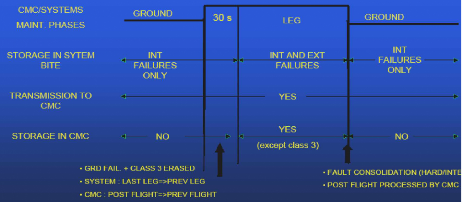
Figure III.29 : Le BITE /Système de type
1

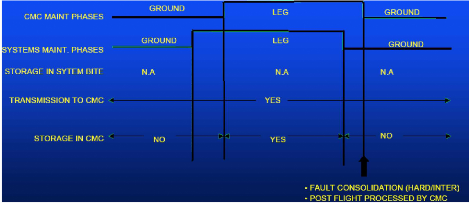
Figure III.3 1 : Le BITE /système de type
3
III.5.2.3 Le mode interactif
III.5.2.3.1 Système type1
Ce mode est basé sur un dialogue interactif entre un
système d'avion et le MCDU, l'opérateur est guidé par
l'information fournie par le système lui même.
Ce mode inclut :
· Pour le système BITE :
- L'interruption du mode normal (détection,
mémorisation, transmission)
- Affichage du menu et l'exécution de fonctions, lorsque
sont ordonnés d'après le CMC.
· Pour leCMC :
- Interruption du mode normal, seulement pour le système
impliqué avec le dialogue interactif.
- Interface entre le système et le MCDU.
III.5.2.3.2 Système type2 et 3
Ce mode ne constitue pas un dialogue de CMC /
système puisque l'opérateur est guidé par
l'information fournie par le CMC (et pas par le
système).
· pour le système BITE :
- pas d'interruption du mode normal (excepté le cas de
TEST)
· pour le CMC :
- interruption du mode normal, seulement pour le système
inclut avec le dialogue interactif.
- Management de dialogue
III.5.3 INTERFACE D'UTILSATEURS
Les systèmes de l'avion se communiquent avec le
CMC par les bus d'ARINC de low speed (LS) et high speed (HS)
et par des liaisons discrètes, en plus Chaque CMC
s'échange les informations de maintenance à travers ces bus avec
les 3 MCDU, imprimante et
l'ACARS.
Les bus de communication permettent le dialogue avec le
CMC actif et la transmission des paramètres
généraux. Dans le cas ou le CMC1 est inactif, le
CMC2 se communique avec les interfaces d'utilisateurs via le
CMC 1.
Le tableau ci-dessous montre la distribution de bus entre
équipements :
|
C1
|
C2
|
C3
|
|
MCDU1
|
MCDU2
|
MCDU3
|
|
ACARS
|
imprimante
|
|
III.5.3.1 Dialogue CMC/ MCDU
L'autorisation de connexions avec les MCDUs est seulement
donnée par le CMC master. Ce dernier permet
l'utilisation de 2 MCDUs seulement par 3. Il existe deux modes de dialogues
avec le MCDU et le CMC :
- Mode normal à travers l'interrogation des données
de maintenance via les rapports : rapport du LEG dernier, rapport du LEG
précédent, rapport de classe3.
- Le mode interactif à travers l'interrogation du BITE de
système lié via les rapports SYSTEM REPORT TEST.
Chaque MCDU est aussi lié aux CMCs par
(ON/ OFF) discrets.

Figure III.32 : connexion du CMC avec ces
périphériques III.5.4 LE MANAGEMENT DE COMPUTER
III.5.4.1 Le management d'activités de
computer
Le computer assure ses propres opérations
dépendantes de ses propres fonctionnement du hardware et software :
- il contrôle la cohérence entre le hardware et le
software.
- Il transmet le numéro de référence
(P/N)
- Il exécute le reset dans chaque coupure de courant
- Il détermine ces conditions opérationnelles
dominantes (maître / esclave) III.5.4.2 Le management de
données de maintenance
Le CMC est responsable du management de stockage
des données de maintenance. Dans chaque ouverture de transition LEG du
CMC :
- Classe le vol actuel
- Met à jour les derniers 64 LEGs dans le rapport de vol
précédent
- Mémorise l'en-tête du nouveau LEG : date,
flight Number, city pair from, UTC de départ, IDENT A/C et
numérotation DB/N (si l'option de filtrage de données est
activée).
Dans chaque fermeture de transition LEG le CMC
mémorise UTC END, et le city pair TO.
Remarques :
Le CMC gère aussi le contenu du
mémoire de données, capacité de mémoire pour un
seul vol est 64 avertissements et 64 pannes.
Le CMC a la capacité de mémoriser
256 avertissements et 256 pannes qui sont classés dans le rapport de vol
précédent.
III.5 .4.3 La fonction d'auto test
Le but de cette fonction est de contrôler
l'opération correcte du computer à travers la
génération des tests internes. Les résultats
d'auto test sont analysés par la fonction du BITE. - Pannes de classe 2
: arrêt du CMC maître et la commutation de
CMC2
- Pannes de classe 3 : différents résultats.
Note : le CMC
génère les messages de classe 1 « interruption
d'alimentation » quand il est excité après la coupure de
courant.
III.5.4.4 Contrôle de commutation
Dans l'opération normale, le CMC1 est
le maître, il est connecté à la sortie de tous les
systèmes (les liaisons entre le CMC et le
système BITEs de type 1et le CMC et les
périphériques : MCDU, imprimante, ACARS) voir la figure
précédente : figure
La commutation peut aussi être le résultat d'une
commutation interne ou avec l'action sur le bouton poussoir dans le cockpit.
L'étage de commutation est alimenté avec le
28VDC d'après le réseau d'avion. A la détection d'une
panne du CMC1 classe 2, la commutation automatique interne de
CMC1 permet au CMC2 d'être directement
connecté aux différents systèmes
Le bouton-poussoir permet les opérations suivantes :
- La position AUTO : c'est la position normale, la
surveillance internes des dispositifs est activée et permet la
commutation automatique d'être effectuée dans le cas d'auto
détection d'une panne.
- La position OFF : forçage externe est activé,
la commutation des ordres à travers la surveillance interne
inhibée, le CMC2 est connecté (via le
CMC1) aux items des équipements.

Figure III. 33 : Contrôle de commutation III.5.4.5
Traitement des paramètres de configurations avioniques
Le rapport de configuration avionique est disponible seulement si
le CMC 1 est le master (maître) et aussi pendant la
phase ground de maintenance.
Les données (part number (P/N), serial number (S/N) et
data base number DB/N) sont utilisées dans la constitution du rapport de
configuration avionique, sont acquises depuis l'étiquette 354 de
différents BITE de chaque système et mémorisées
dans une mémoire non volatile (CMC stocke les
informations suivantes : le nom du système BITE, le nom du LRU
correspondant au système BITE et le P/N et DB/N
Le CMC compare en permanence, pour chaque LRU,
les paramètres de configurations concernées (P/N, DB/N et S/N)
acquis avec l'information de configuration mémorisée NOTA
: les S/Ns ne sont pas contrôlés.
Le management et la Transmission du numéro de
configuration avionique mémorisée sont dans le but de permettre
l'opérateur
- identifier la configuration avionique mémorisée,
spécialement avant et après le transfert au
CMC2
- identifier que la configuration a été
effectivement transférée au CMC2. - confirmer
est ce que le transfert (du CMC1 vers le
CMC2) a réussi.
P/N : Part Number Numéro
définissant l'identité d'un équipement. Deux
équipements de même PN sont interchangeables.
S/N : Serial Number
Numéro individuel d'un équipement qui appartient à une
famille de PN. Le SN est un numéro unique et permet le suivi individuel
de toutes les pièces montées sur avion.
DB/N : data base Number c'est
un numéro inclut dans le software de différents systèmes
(se fait sur commande par la compagnie aérienne)
NOTA :
La configuration avioniques mémorisée sera
effacée dans deux cas :
- modification de IDENT A/C
- changement de version d'A/C (330/340)
III.5.4.6 Traitement de pannes et d'avertissements
:
III.5.4.6.1 Traitement d'avertissements
Le CMC acquiert et contrôle les messages
d'avertissement de FWC1 et FWC2 en dessous de phases de maintenance, sur
l'étiquette 357.
Ces messages sont transmis comme suit :
- ATA
- Sous ATA
- Code d'avertissement calculé
- Type d'avertissement calculé
Pour l'affichage, si l'un de ces messages est transmis au
CMC plusieurs fois pendant le même vol, ils seront
englobés dans le PFR (rapport de vol) dans la colonne COCKPIT EFFECTS
III.5.4.6.2 Traitement de pannes
L'acquisition de toutes les pannes de système BITE est
fournie en dessous de la phase de maintenance en vol seulement. (Les pannes de
BITE valides sont les pannes de systèmes et aussi les données
BITE internes du CMC et le BITE son opposé) .Ensuite le
CMC indique les paramètres (temps, date, phase de
vol).
Pour l'affichage, ces défauts sont englobés dans le
PFR colonne de pannes.
Le but de cette fonction est d'améliorer
l'opération d'impression du PFR dans la fin de chaque vol par le
filtrage de pannes /avertissement faux et injustifié.
NOTA
Le filtrage peut être activé ou
désactivé à travers le MCDU.
Les critères de filtrage peuvent aussi être
chargés par le MDDU.
Quand un PFR est filtré le numéro DB/N sera
affiché dans la zone de l'en tête de page
III.5.4.6.4 Les fonctions de
corrélation
Le CMC utilise cette fonction pour regrouper
tous les messages de pannes reliés au même événement
(ATA REF), en plus la fonction de corrélation est accomplie quand le
rapport
de vol CURRENT ou POST ou PREVIOUS est requis par
l'opérateur.
Quand le message de la panne A
apparaît, le CMC ouvre la fenêtre de
corrélation, pendant 1 mn, il associe tous les message de panne qui ont
le même chapitre ATA( 3 ou 4 digits) , Puis il mémorise les 6
premiers systèmes qui ont envoyés les messages de pannes
NOTA
Si plus de 6 identificateurs peuvent être
associés à un message, seulement 6 qui vont
être mémorisés, le reste seront perdus.
III.5.5 LA FONCTION INTERACTIVE
Dans cette partie on va décrire la fonction interactive
qui permet l'interrogation de BITE du CMC1 (2) à
travers le MCDU. La sélection de menu principal nous permet
l'accès aux items suivants :
1. LE PFR (RAPPORT DE VOL)
2. LRU REPORT
3. GND SCANNING
4. TSD -TROUBLE SHOOTING DATA-
5. PANNE DE CLASSE 3
6. GROUND REPORT
III.5.5.1 LE PFR (RAPPORT DE VOL)
Le PFR peut être imprimé par l'imprimante du
cockpit ou envoyé à l'ACARS, il expose les effets du cockpit (les
pannes de type 1 et 2 affichées sur l'ECAM) et les messages de pannes
guidés par le CMS (figure)
Post flight report (rapport après vol):
son but est de présenter les pannes de classe 2 et 3 internes
et externes qui ont été détectées par le
CMC 1 (2) pendant le dernier vol. Il est disponible au sol
Previous flight report (rapport du dernier vol:
son but est de présenter les pannes de classe 2 et 3 internes
et externes qui ont été détectées par le
CMC1 (2) pendant les deniers 63 de vols + le vol actuel.
Current report (vol actuel): le but de cet
item est de présenter les informations d'opérations
reliées au CMC, il est disponible seulement pendant le
vol. Il engendre les fonctions suivantes :
PIN PROG : contient les données de configurations
d'avion
Données spécifiques : permet d'afficher les
informations concernant :
- téléchargement des données de bases depuis
le MDDU vers le CMC
- mémorisation initiale de la configuration avion et
acquisition incorrecte.
6 7 8

13
14
15
16
1
2
3
4
5
17
18
19 20 21 22
9 10 11 12
25
26
24
23
1identification de l'avion 13zone du UTC/phase de
vol
2date 14N° d'effets dans le cockpit (par le
FWS)
3numéro de vol 15N° de pannes
mémorisées
4city pair 16panne n'est pas affichée
+ Avertissement supputé par le FWC
5le temps de départ / arrivée 17ATA ref (4
digits)
6le non du LEG : post/current/previous 18état de
maintenance + par le computer/ syst
700 pour post ¤t, 01,02...pour previous 19msg
texte de panne
8en tête de page 20msg par le système
(hard/intermittente)
9le temps de print 21classe de panne (1 & 2
seulement)
10la date de print 22ATA+ATA ref de la panne (6
digits)
11le N° de page du PFR 23pied de page
12le print à travers le CMC master 24zone de msg
de panne (CMS)
25source de la panne si elle existe + le système
qui transmet la panne (Si le syst. est suivi par (*) : syst. affecté par
une panne de classe 2 26systèmes (6 fois max) qui détecte
toujours la panne
III.5.5.2 Rapport LRU
Il montre la configuration du hardware et software du
CMC 1 (2) : part number (P/N), serial number (S/N) et data
base number (DB/N).
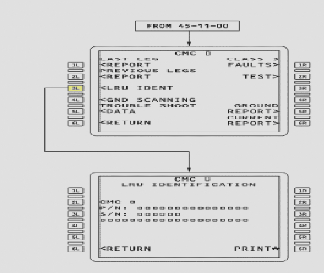
Figure III. 35: l'accès au rapport
LRU
III.5.5.3 TSD (trouble shooting data)
Il sert à présenter les données
codées (hexadécimal) qui associent chaque panne stockée
dans le CMC 1(2) et affichée dans les rapports
LAST/PRIVIOUS REPORT et GROUND REPORT

Figure III.36 : l'accès au rapport TSD
III.5.5.4 GND scanning
Cette fonction est basée sur le contrôle et
l'analyse de pannes. Toutes les pannes détectées pendant
l'utilisation de cette fonction (internes ou externes, classe 1,2 et3) sont
exposées sur le MCDU dans un temps réel et
mémorisées dans une mémoire non volatile.
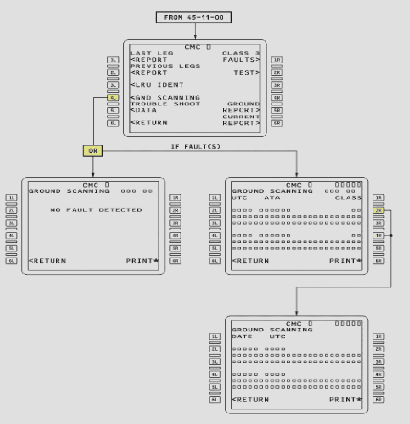
Figure III.37 : l'accès au GND
scanning
III.5.5.5 GROUND report
Donne la liste de défauts internes et externes qui ont
été détectés par le CMC 1(2) et
qui sont survenus pendant l'atterrissage
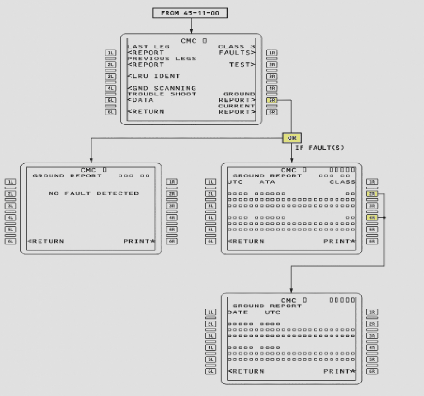
Figure III.38 : l'accès au Ground
report
III.5.5.6 Panne de classe 3
Son but est de montrer toutes les pannes de classe 3 internes ou
externes qui ont été
mémorisée dans le CMC1 (2) pendant
le vol.

Figure III. 39 : l'accès au rapport de CLASSE
3
III.5.5.6 Test
Cet item permet l'initiation du test de CMC 1(2)
depuis le MCDU.
Nota
Le test du CMC master est impossible, seulement
le test du CMC slave (esclave) est permis.
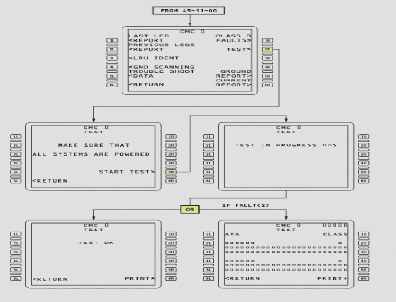
Figure III .40 : l'accès au rapport du TEST III.5.6
Le groupe facultatif de la maintenance
Airbus industrie, en coopération avec les
opérateurs A330/A340, a développé un lot de nouvelles
fonctions pour agrandir les capacités du Système Central de
Maintenance, c'est
Le groupe facultatif de la maintenance, Ce
groupe peut être divisé dans trois catégories :
1. Le Rapport d'Entretien (Servicing Report) réunit un
certain nombre de paramètres, comme les niveaux huiles/liquides,
l'état de filtres, etc... ; dans le but de réduire la charge
d'entretien.
2. le rapport de configuration permet à la compagnie
aérienne de savoir quels sont les numéros (P/N, S/N, DB/N)
adaptés sur leurs avions ; chaque changement de configuration est aussi
détecté par le CMC, mémorisé et transmis
après.
3. Caractéristiques améliorant le processus de
dépannage en fournissant des informations supplémentaires comme
drapeaux (flag) et consultatifs
( Advisories ) sur le PFR et les nouveaux moyens de
transmission :
Le téléchargement d'informations sur à un
disque et l'envoi des rapports du BITE.
III.5. 6.1 Servicing report (SRR) (rapport
d'entretien)
C'est une fonction qui englobe ou réunit un certain
nombre de paramètres qui nécessitent des checks
périodiques, son but principal est de faciliter la maintenance en
préservant le temps. Cette particularité précieuse
utilisée quand l'avion est en opération de préparation
pour le vol, et quand il a des régulations spécifiques, comme les
opérations ETOPS
(Extended Twin-Engine
OPerationS : opération étendue en
bimoteurs)et les checks additionnelles exigées.
Ce rapport est accessible à travers le MCDU, il est
disponible ou bien en vol ou au sol. Le Servicing Report (SRR)
est disponible en deux formats :
1. Format complet : Il est composé de
différents items, qui ont besoin d'un entretien ou non.
· Moteurs
· IDG « Integrated
Drive Generator »
· APU
· Hydraulique
· Carburant
· Train d'atterrissage
· Oxygène
· Eaux usées
· Air conditioning (climatisation)
· Porte et slides (glissades)
Où les paramètres contrôlés sont :
· Nivaux d'huiles
· Carburant, fluide hydraulique
· Etat des filtres
· Pression des bouteilles, pneu, réservoir
· Détecteur de limaille etc....
2. Coupon format : présente seulement
les systèmes qui ont au moins un paramètre qui nécessite
un entretien. Un résumé qui sera toujours édité en
premier dans le but d'indiquer l'état de chaque système (par OK
ou CHECK). Ce résumé est suivi par certains nombres de coupons,
chacun donne l'entretien des paramètres de chaque
système déclarés CHECK dans le
résumé.
Remarque 1 : Il existe un autre type de
présentation du SRR, c'est la présentation dans
le MCDU qui contient 11 pages, on peut aussi programmer à travers ce
dernier, certaines fonctions reliées au SRR, il est
possible de programmer le Format complet du SRR ou le coupon
format du SRR.
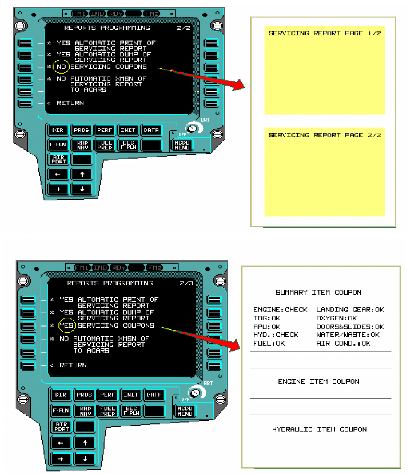
Figure III. 41 : l'accès à la
programmation du SRR
Remarque 2 :
On peut aussi programmer une transmission automatique soit
à l'imprimante, l'ACARS ou bien le MDDU.
III.5.6.2 Rapports de configuration d'avion
Cette caractéristique du CMC donne la capacité de
diriger les configurations d'avion, pour ce but, trois rapports sont
été conçus :
1. le rapport de configuration d'équipement
(Equipment Configuration
Report) ECR : il donne la liste complets des
P/N, S/N et DB/N des équipements connectés au CMC
2. le rapport de configuration de changement
(Configuration Change
Report) CCR : il est crée à
chaque fois ou il y a un changement détecté par le CMC concernant
le P/N ou DB/N.
3. le rapport de configuration de disquette
(Diskette Configuration
Report) DCR : c'est une liste de disques
associée aux avioniques, ayant la donnée de
référence, ils contiennent (téléchargement du le
logiciel par le disque, données de base de navigation ...).

Figure III-42 : Partie d'un Rapport de configuration
d'avion
III.5.6.3 Flag et Advisories
On a vu que le PFR contient les alarmes de l'ECAM montrées
dans la colonne EFFECT COCKPIT.
Quand la panne survient pendant le vol, elle sera
reportée par l'équipage dans le livre de vol (LOG
BOOK) et si elle est identique aux alarmes d'ECAM, sera facile de la
récupérer à partir du PFR. Dans le cas contraire la
corrélation entre le livre de vol et le PFR sera faite en utilisant le
UTC, la phase de vol et le N° de l'ATA.
Innovation de l'option du CMC c'est d'enregistrer les flags et
les advisories affichés sur les PFD, ND et SD du captain (pilote) ou
first office (co-pilote) dans la colonne EFFECT COCKPIT du PFR, pour rendre la
corrélation entre le PFR et le LOG BOOK possible, en
donnant moins de place pour l'interprétation et plus de place pour
l'efficacité.

Figure III.43 : Exemple sur un flag affiché sur
le PFR
III.5.6.4 Rapport AIR/ SOL de BITE
Depuis la station sol, un opérateur peut
requérir (demander) le rapport AIR/ SOL de BITE de tous les
systèmes à travers l'ACARS. Ce rapport est accessible à
travers SYSTEM REPORT / TEST FUNCTION.
III.5.6.5 La fonction de
téléchargement
La nécessité d'exploiter les informations de la
maintenance dans un PC, est devenue importante, c'est pour ce la que le contenu
du CMC ainsi que les rapports de BITE peuvent maintenant
transférées directement sur une disquette insérée
dans le MDDU.
La disquette doit être porter le fichier de configuration,
en utilisant au sol le logiciel du MOT (Maintenance Option
Tool).
IV.1 INTRODUCTION
La maintenance en aéronautique, est la clef de
voûte de la sécurité des vols, indispensable à toute
exploitation d'aéronefs. Sans cesse plus exigeante, elle connaît
de profonds changements avec la prolifération des avions de
dernières technologies.
Dans cette partie on va présenter un type de
maintenance, qui est la maintenance de ligne du CMC, car ce
dernier, ces risques de tomber en panne sont minimes et son dépannage
dans le cas contraire se fait dans l'atelier ou à l'étranger
IV. 2 GÉNÉRALITÉS DE LA
MAINTENANCE
La maintenance est définie comme étant
"l'ensemble des actions permettant de maintenir ou
de rétablir un
bien dans un état spécifié ou en mesure d'assurer un
service
déterminé. Maintenir c'est donc effectuer des
opérations qui permettent de conserver le potentiel du matériel
pour assurer la continuité et la qualité de la production.

L'organigramme de différentes formes de
maintenance IV.2.2 Les différentes formes de maintenance
IV.2 .2.1 La maintenance corrective
Il s'agit d'une "maintenance effectuée après
défaillance". C'est une politique de maintenance qui correspond à
une attitude de réaction à des évènements plus ou
moins aléatoires et qui s'applique après la panne.
IV.2.2.2 La maintenance préventive Maintenance
systématique
"Maintenance préventive effectuée selon un
échéancier établi en fonction du temps ou du nombre
d'unités d'usage".
La maintenance conditionnelle
Maintenance préventive subordonnée à un type
d'évènement prédéterminé
révélateur de l'état de dégradation d'un bien.
IV.2.3 la maintenance embarquée
L'augmentation de la taille des avions ainsi que le
développement des systèmes avioniques ont impliqué une
croissance du fardeau, qui est la maintenance.
Pour assurer la sécurité, la fiabilité et
surtout la réduction du coût d'exploitation de la maintenance, le
système embarque de maintenance vient à ses buts.
IV.2.3.1 Niveaux de maintenance
L'information de défaillance délivrée par le
CMS correspond à plusieurs niveaux de maintenance.
maintenance de ligne :
Cette maintenance est caractérisée par
l'intervention rapide du personnel de la maintenance en un court délai
et elle se limite à l'isolation et remplacement de l'équipement
défaillant
Cette action consiste à identifier et /ou confirmer la
condition de la défaillance, l'isolation de la défaillance et le
remplacement de l'unité défaillante LRU.
Un test est effectué avant la procédure du
remplacement et de l'installation afin de vérifier si le système
de l'opération est correct.
Hangar ou maintenance de base principale
Cette maintenance est caractérisée par une
intervention du personnel de la maintenance en une plus longue durée. Et
elle concerne généralement les actions qui ne peuvent être
effectués en maintenance en ligne parce que les procédures sont
très longues ou parce que l'intervention du personnel plus
qualifié est nécessaire.
Maintenance dans l'atelier
Ces actions de maintenances sont effectuées dans des
intervalles réguliers
(Check A, A2, B.)
L'intervention personnelle de la maintenance est donc
programmée suivant l'utilisation de l'appareil et concerne les items des
équipements dont lesquelles certaines pièces mécaniques ne
sont pas testées. Ses défaillances sont appelées les
défaillances cachées.
IV.2.4 l'équipement d'essai incorporé
(BITE)
On a décrit le BITE dans le chapitre
précédent, dans cette partie on verra le test BITE du
CMC.
Le BITE fournit dans un avion les fonctions suivantes.
-Mise en mémoire des pannes rencontrées en vol
- La déclaration de l'état des pannes en vol et au
sol
- Les fonctions d'essais incorporées servaient à
isoler les unités défectueuses, la vérification de la
performance spécifiée d'un équipement et les essais au
niveau du système.
IV.2.4.1 BUT DU BITE :
- Aider le technicien à accomplir les taches de
maintenance de l'avion
- L'amélioration de l'efficience des activités de
maintenance.
- Réduction des coûts de maintenance.
- Les simplifications des procédures de maintenance
(technicien).
- En plus faciliter la correction des problèmes en
labo.
IV .2.4.2 ROLE DU BITE :
1- Détecter les conditions de défaillance du
système hôte.
2- Assister le mécanicien lors de l'isolation d'une
défaillance
3- Aider le mécanicien à établir le bon
fonctionnement du système hôte
IV .2.4.3 Diverses classes de pannes
Les pannes détectées par le système BITE
sont classifiées dans trois catégories (classe 1, 2,3) eu
égard à leur conséquences sur la sûreté et la
disponibilité de l'avion.
Pour une panne donnée, MMEL
«Master Minimum
Equipment List »K (voir annexe)
indique au pilote si l'avion peut continuer de voler ou pas selon
trois catégories :
· GO : l'avion (A/C) peut continuer de
voler sans instruction.
· -GO IF : conditions a respecter (essais,
disponibilité de système, conditions atmosphériques).
· NO GO : intervention obligatoire avant
la sortie de l'avion en service.
IV .2.4.3.1 1es Pannes de classe 1
Ces pannes sont détectées par les systèmes,
qui peuvent avoir une conséquence opérationnelle (aspect de
sécurité) sur le vol courant. Elles sont indiquées
à l'équipage en vol
· par les messages (niveau 1, 2,3) sur EWD" Engine/warning
display (EWD)
· par des drapeaux sur PFD (primary flight display ou sur
le navigation display (ND) ou sur le SD system display
· par des messages sonores dans le cockpit.
IV .2.4.3.2 1es Panne de classe 2
Ces pannes sont détectées par les
systèmes, qui n'ont pas une conséquence opérationnelle
(aspect de sécurité) sur le vol courant ou sur le suivant vol
mais peut avoir une conséquence si une deuxième panne
apparaît Elles sont indiquées au sol par les rapports de l'ECAM
après l'arrêt des moteurs.
IV.2.4.3.3 1es Panne de classe 3
Ces pannes sont détectées par les
systèmes, qui n'ont pas des conséquences ni sur la
sécurité de l'avion ni sur la disponibilité. Elles peuvent
être corrigées pendant l'opération programmée de
maintenance et elles ne sont pas indiquées à
l'équipage.
Le tableau ci-dessous résume cette classification:
Classe1 Classe 2 Classe 3
Indication à l'équipe
Maintenance Présenté
automatiquement à la fin de vol :
Tirage du rapport de vol le PFR
Correction en conformité
avec le contenu du MEL
(Délai du temps...) La correction peut
être reportée pendant 500 heures de vol.
Indication à l'équipage
Expédition Conséquences
TRAITEMENT
-Message affiché dans le cockpit
-alarmes\ avertissement sur le EWD
-drapeau sur le PFD, ND ou SD
-alarmes locales
Entrée du MEL :
GO
GO IF
NO GO
Lumière clignotante à la fin du vol
Préambule du MEL : GO
Idem pour classe1
Pas d'indication à l'équipage
MEL non applicable
Aucun temps fixe pour la correction: mais, elle est
recommandée pour améliorer la fiabilité
d'expédition
Présenté en demande quand il est nécessaire
: Messages de pannes sur le CMC rapport classe 3
IV.2.5 Les tests
Un test a pour but d'assurer le bon fonctionnement de
différents éléments d'un appareil. Son déroulement
peut être divisé en 4 groupes:
test spécifique
test de démarrage
test cyclique (périodique)
test du système
IV.2.5.1 le test de démarrage
Ce test est le premier test de sécurité, son but
est d'assurer la conformité avec les objectives de
sécurité.
Il est exécutable seulement au sol après un
long délestage (coupure de courant supérieur à 200ms), sa
durée est en fonction du système qui n'est pas
opérationnel durant le test de démarrage.
Si l'avion est en vol, le test de démarrage est
limité aux quelques pièces seulement pour permettre un retour
rapide de l'opération du système.
Les taches typiques de ce test sont:
-test de microprocesseur
-test de mémoire
-test de l'ARINC et les divers circuits I/O
-test de configuration
IV. 2.5.2 test cyclique
Ce test est effectué en permanence, il ne perturbe pas
l'opération du système
Les taches typiques de ce test sont:
-le test de watchdog (dispositif capable de redémarrer le
microprocesseur si le logiciel échoue).
-le test de RAM
-contrôle permanant, effectue par le programme
opérationnel (ex:l'ARINC 429validité de messages).
IV.2.5.3 test de
système
Le but de ce test est de fournir au personnel de la maintenance
les possibilités de tester les systèmes et les
dépanner.
- peut être effectué après un remplacement
de LRU pour vérifier (contrôler) l'intégrité (qui
est en bon état) du système ou sous-système.
- il est similaire au test de démarrage mais plus complet,
il s'effectue avec le fournisseur de tous les périphériques.
IV.2.5.4 test spécifique
Le but de ce test est de produire un stimulus aux diverses
commandes tel que les vérin ou les valves, il peut avoir une
conséquence importante sur l'avion (déplacement automatique des
volets ou du bec de bord d'attaque, ventilation du moteur sec).
IV. 3 Test de BITE du CMC
Le CMC peut être affecté par
Pannes internes
Pannes d'interfaces
IV.3.1 pannes internes du CMC : les
résultats du BITE associé dirigent depuis les résultats de
contrôle BITE dans le CMC, le software et le
hardware.
A- définition de monitoring
(contrôle) interne du CMC : cette fonction peut
être activée suite à :
Test cyclique
Apres un reset manuel
Après POST Power On
Self Tests
D'autres tests
Le tableau qui suit montre un exemple sur la liste des
composants compliqués dans ces tests
Désignation du test
|
Composants internes testés
|
Composants externes
testés
|
Durée
|
Condition d'activation
|
Cyclique
|
-l'étage de
commutation : contrôle la source de courant
-contrôle de input ARINC d'interface
- test de panne du
CMC opposé
- contrôle de output discret
d'interface ....
|
|
|
|
Après un
reset manuel
|
-contrôle du microprocesseur -contrôle
d'alimentation de la RAM
|
|
|
|
Après POST
|
-conformité du software/hardware - contrôle de
composants électriques d'atterrissage
- contrôle de RAM/ EEPROM/EPROM -auto test du
watchdog
|
|
40 s
|
Coupure de courant > 5s et train
d'atterrissage comprimé
|
|
|
|
|
|
|
autres tests
|
- erreur du watchdog -contrôle de inputs
discrets
-erreur de la carte ARINC
|
|
|
|
|
B - structure de message de panne : il existe
deux messages internes du CMC
ATA ref
|
Messages
|
Classe de
panne
|
Type de panne
(interne / externe)
|
Détection
|
|
Test
depuis le MCDU
|
Permanent
|
451334
|
CMCi (1TMi) i = 1 ou 2
|
2
|
INT
|
OUI
|
NO
|
OUI
|
451334
|
CMCi (1TMi) i = 1 ou 2
|
3
|
INT
|
OUI
|
OUI
|
OUI
|
451334
|
CMCi (1TMi) i = 1 ou 2
|
2
|
EXT
|
OUI
|
OUI
|
OUI
|
451334
|
CMCi (1TMi) i = 1 ou 2
|
3
|
EXT
|
OUI
|
NON
|
OUI
|
|
IV.3.2 définition du contrôle d'interfaces
(bus de réception ARINC)
Input ARINC est contrôlé par le
CMC, à travers les étiquettes de maintenance. Le
CMC accompli le monitoring d'interface suivant :
NO REFRESH (pas de rafraîchissement)
Le NO REFRESH de bus vaut dire la confirmation de l'expiration
du temps correspondant Le temps limite = le max de
5 cycles nominaux de l'étiquette la plus lente de bus
utilisé par le CMC
5 secondes minimales
INVALIDITY (invalidité)
Les événements ci-dessous sont
considérés comme des invalidités
- le SSM de l'étiquette dans le cas FW
(Failure Warning) ou FT
(Functional Test)
- la donné acquise n'est pas compatible avec
l'étiquette (ex : l'étiquette 126- phase et vols- la
donnée doit être entre 1 et 10).
IV.3.3 structure de message de panne (bus de
réception ARNIC)
Détection
Test
Cette structure dépend de l'architecture de système
connecté au CMCs, (un seul CMC ou les
deux) , le tableau
- NO REFRESH détecté par les deux
CMCs : structure de message est comme suit
ATA réf
|
messages
|
Classe de
panne
|
Type de
panne
|
Détection
|
|
Test
depuis le
MCDU
|
Permanent
|
xxxxxx
|
B (FIN de B)
B=non du périphérique
xxxxxx = ATA n° de périphérique
|
Généra- lement 3 ou 1
|
EXT OU
INT
|
Dépend
de la
connexion au CMC
|
OUI
|
OUI
|
212634
|
AEVC (2HQ)
|
1
|
EXT
|
OUI
|
OUI
|
OUI
|
3 16234
|
DMC2(1WT2)/ DMC3(1WT3)
|
3
|
EXT
|
NON
|
OUI
|
OUI
|
231233
|
VHFi (1RCi) i= 1 ou 2 ou 3
|
1
|
EXT
|
OUI
|
OUI
|
OUI
|
261234
|
FDUi (2DGi)
i = 1 ou2 ou3 ou 4
|
1
|
EXT
|
OUI
|
OUI
|
OUI
|
304234
|
WHCi (2DGi) i = 1 ou 2
|
1
|
EXT
|
OUI
|
OUI
|
OUI
|
312121
|
CLOCK (2FS)
|
1
|
EXT
|
OUI
|
OUI
|
OUI
|
|
NOTA :
Dans le cas d'INVALIDITÉ la structure de
message de panne est identique au cas NO REFRESH
indiquée dans le tableau précèdent
IV.3.4 pannes d'interfaces avec les outputs
discrets
Les outputs discrets sont cycliquement contrôlés
par le CMC avec un feedback
ATA ref
|
messages
|
Classe de
panne
|
Type de
panne
|
Détection
|
|
Test depuis le
MCDU
|
Permanent
|
451334
|
CMCi (1TMi) i = 1,2
|
3
|
INT
|
NON
|
OUI
|
OUI
|
|
IV.3.5 pannes d'interfaces : coupure de courant
· 1ER CAS : coupure de courant
>5s

La structure de message est la suivante :
ATA ref
|
messages
|
Classe de
panne
|
Type de
panne
|
Power up
test
|
depuis le
MCDU
|
Permanent
|
240000
|
Interruption de
l'alimentation
|
1
|
EXT
|
OUI
|
NON
|
NON
|
|
· 2éme CAS : coupure de courant
< 5s
Pas de message dans le BITE
· 3éme CAS : reset manuel
Le message de panne identique au 1er cas
· 4éme CAS : étage de
commutation (28 V) (>5s) La structure de message est comme
suit
ATA ref
|
messages
|
Classe de
panne
|
Type de
panne
|
Détection
|
|
Test depuis le
MCDU
|
Permanent
|
240000
|
CMCi (1TMi) Alimentation de commutation
|
3
|
EXT
|
OUI
|
NON
|
NON
|
|
IV.3.6 contrôle de systèmes de type 3
La structure de message est comme suit :
ATA ref
|
messages
|
Classe
de panne
|
Type de
panne
|
Détection
|
|
Test depuis
le
MCDU
|
Permanent
|
xxxxxx
|
B (FIN de B) B=non du périphérique xxxxxx = ATA
n° de
périphérique
|
1 (pour
les syst
controlés en vol)
2 (pour le
contraire)
|
EXT
|
Non
|
NON
|
yes
|
|
Nota :
· Systèmes contrôlés en vol comme ICE
D1 (ice detector), PAX OXY (oxygène de
passagers) etc ...
· Systèmes non contrôlés en vol
comme GCU EMERGENCY (Generator Control
Unit), APU AFE (APU Automatic
Fire shut down) etc....
IV .4 PRESENTATION DE LA MAINTENANCE EN LIGNE «
LINE
MAINTENANCE »
Il en existe trois sortes. Elles sont effectuées dans les
escales ou sur la base de maintenance et concernent l'ensemble de l'avion.
- visite de transit, après chaque vol
- visite journalière (VJ), toutes les 24 heures
- visite hebdomadaire ou 'weekly' (S ou W)
Les taches de la maintenance de ligne sont des taches sur la
ligne de vol entre deux vols consécutifs :
· L'identification / Confirmation d'une condition de
défaillance
· L'isolation de la défaillance à 1
unité / composante unique
· Le remplacement de l'unité / composante
défective
· Vérification du Bon fonctionnement du
système rétabli suite à la réparation /
remplacement
· L'exécution des essais de vérification de
fonctionnement du système assujettie au
temps disponible / réglementation de navigabilité
aérienne (systèmes critiques / essentiels au vol).
IV .4 .1 CONFIGURATION DE MAINTENANCE ET PANNES On a dit
que le CMC est affecté par
· Pannes internes du CMC
· Pannes d'interfaces
Type de panne du CMCgénéralement
sont des pannes de classe 2 et 3 seulement

Figure IV. 1 : Configuration de maintenance et pannes du
CMC
On a présenté déjà les messages de
pannes du CMC dans la partie BITE TEST du CMC
Les deux tableaux suivants vont les résumer :
Tableau 1
|
PANNES
|
CLASSE
|
|
PANNES
D'INTERFACES
|
COUPURES DE
COURANT
|
>5s
|
Interruption d'Alimentation Pas de message
Interruption d'Alimentation
|
1
|
|
< 5s
|
|
|
Reset manuel
|
1
|
|
Etage de commutation Coupure de courant >
5s
|
CMCi / alimentation de commutation
|
3
|
|
CONTRÔLE DE
SYST TYPE3
|
Système de type 3 Contrôlé en
vol
|
SYSTEME
|
1
|
|
Système de type 3 Contrôlé au
sol
|
SYSTEME
|
2
|
Tableau 2
|
PANNE
|
CLASSE
|
|
Pannes
internes
|
|
CMC i
|
2
|
|
CMC i
|
3
|
|
Pannes Interface
|
Bus de reception
|
No refresh détecté seulement par un seul
CMC
|
CMCi / WRG : « bus de système » au CMC
i
|
3
|
|
ARINC
|
No refresh détecté par les deux CMCs, ou
message non valide
|
"Systeme"
|
3
|
|
|
Discrete
Outputs
|
DSO Défaut de collage au sol
(toujours actif)
ou
DSO Défaut de collage à OPEN toujours
(toujours inactif)
|
CMC i
|
3
|
NOTA : Défaut de collage
Présence de points figés en permanence au niveau
logique « 0 » ou « 1 ».
IV .4 .2 PARTICULARITES IDENTIFIANTES IV .4 .2.1 TSD
(trouble shooting data):
Le TSD associe chaque défaillance et donne d'autres
informations de son origine. Pour le CMC, TSD sont
composés de 48 digits affichés sur l'écran du MCDU. Ceci
contient deux différents champs (zones) :
1. TSD COMMUNles 12 premiers digits (numéro)
"C"
2. TSD SPECIFIQUEles 36 digits suivants "S"
NOTA : Le décodage de TSD COMMUN est
obligatoire pour la recherche de panne, il est décrit dans la page
suivante du rapport TSD, Le décodage de TSD SPECIFIQUE il n'est pas
utilisé dans la recherche de panne.
|
CMC 1 XX/XX
TROUBLE SHOOTING DATA
DATE UTC
05 JUN 1209
|
|
C C C C C C C C C C C C S S S S S S S S S S S S S S S S S
S S S S S S S
|
|
S S S S S S S S S S S S S S S S S S S S S S S S S S S S S
S S S S S S S
DATE UTC
06 JUN 1845
|
|
C C C C C C C C C C C C S S S S S S S S S S S S S S S S S
S S S S S S S
|
|
|
S S S S S S S S S S S S S S S S S S S S S S S S S S S S S
S S S S S S S
|
|
< RETURN PRINT *
|

TSD COMMUN
TSD SPECIFIQUE
Ci-dessous un exemple sur un TSD imprimé :

Figure IV.2 : TSD du CMC

0: carte CPU
1: carte ARINC 1
2: carte ARINC 2
3: carte I /O
4: OBRM
5: alimentation
6: commutation
7: software
8: ECSB
E: indeterminé
F: externe

Code
D'erreur :
(Voir les tableaux
Dans les pages suivantes)
OCCURRENCE :
0 : 1 OCCURRENCE 1 : 2 OCCURRENCE
2 : 3 OCCURRENCE apparition de
défaillance:
3 : 4 OCCURRENCE
Type de coupure de courant : O : pas
d'infos
1 : T< 200 ms
2: 200 ms< T< 5s
3 : T > 5s en vol
4 : T > 5s en vol

1 : au sol
2 : en vol
3 : en vol, puis elle disparaît ensuite elle
apparaît au sol
Ne sont pas utilisés (000)
C1C2C3 C4 C5 C6 C7 C8 C9
C10C11C12
: Type de défaillance :
Type de test:
0: pas d'infos
1: auto test
2: test cyclique 4: test opérationel

Initialisation :
0 : pas d'infos
1 : reset
manuel
2 : coupure de courant
4 : initi
software
8 : test MCDU

IV .4 .2.1.1 Le décodage de TSD COMMUN
IV.4 .2.1.2 Les tableaux de décodage du code
erreur Tableau 01
|
CODE
ERREUR
(hexa)
|
SIGNIFICATION
|
Cartes concernées
|
classe
|
nature
|
|
01 E
|
--
|
SOFTWARE
|
2
|
INT
|
|
020
|
--
|
SOFTWARE
|
2
|
INT
|
|
021
|
--
|
SOFTWARE
|
2
|
INT
|
|
023
|
--
|
SOFTWARE
|
2
|
INT
|
|
03B
|
Problème pendant la construction de message de
défaillance
|
SOFTWARE
|
2
|
INT
|
|
03C
|
Défaillance de CPU
|
CPU
|
2
|
INT
|
|
03D
|
Défaillance de RAM (parité)
|
CPU
|
2
|
INT
|
Tableau 02
3
CODE
|
ERREUR
(hexa)
|
SIGNIFICATION
|
Cartes concernées
|
classe
|
nature
|
|
226
|
Acq ARINC suivant test de bus BCL2
|
--
|
3
|
EXT
|
|
227
|
Acq ARINC suivant Le test de bus
CPC1
|
--
|
3
|
EXT
|
|
228
|
Acq ARINC suivant le test d'un bus qui n'est pas
utilisé
|
--
|
3
|
EXT
|
|
229
|
Acq ARINC suivant le test de bus DMC EFIS
capt
|
--
|
3
|
EXT
|
|
22A
|
Acq ARINC suivant
le test de bus FWC1
|
--
|
3
|
EXT
|
|
22B
|
Acq ARINC suivant le test de bus
SDAC1
|
--
|
3
|
EXT
|
|
22C
|
Acq ARINC suivant le test de bus GPSSU1
|
--
|
|
EXT
|
IV.4 .2.1.3 Exemple sur le décodage du
TSD

Jan 21 0430 jan 21 0405
0AA131 141000000000000000
0C8034412000000000000000
0000000000000000000000000
000000000000000000000000
|
- C1/C2/C3
- C4
- C5
-C6
-C7
-C8
-C9
|
DGO M1, carte I/O OCCURRENCE 2 I/O carte
Auto test Reset manuel
T> 5s au sol
Au sol
|
- C1/C2/C3
- C4
- C5
-C6
-C7
-C8
-C9
|
DGO M1, carte I/O OCCURRENCE 1 I/O carte
Test opérationel
Initi software
T< 200 ms
En vol
|
IV .4 .3 Test rapid

Figure IV.3 : l'accès au test du CMC
IV .4 .4 Les données
spécifiques
Ne sont pas utilisées dans les recherches standard de
panne
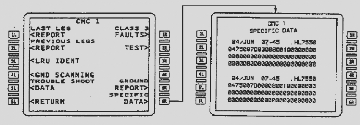
Figure IV.4 : l'accès aux données
spécifiques
IV.4 .5 Le CMC et la MMEL (Master Minimum Equipment List)
idem pour la MEL Dans la MMEL on a :
- CMC1GO
- CMC2GO
Comme il est montré dans la page suivante «
Exemplaire de la MEL du chapitre 45 » IV.4 .5.1 Les
réglementations *(Voir Annexe)
Les documents suivants doivent être présentés
et lus pendant l'opération de maintenance
TFUTechnical Follow Up
SBService Bulletin
SILService Information Letter
IV .4.6 TRUCS DE LINE MAINTENANCE IV .4 .6 .1 To check
(vérifier) dans le cockpit
vérifier si «< CMS »
(ligne) est affichée sur chaque MCDU Comme nous montrons l'image :

= si non « < CMS », les cas
suivants peuvent être présentés :
panne du CMC1 commande la commutation
automatique ; CMC2 devient défectueux, pas
d'interrupteur inverse envers le CMC1CMC1 et
CMC2 défectueux.
Panne de classe 3 du CMC1 ; la majorité
de fonctions du CMC1 est disponible pas de commutation envers
le CMC2, et la perte du «< CMS
= perte d'un « CMCx »
erreur permanente du CMCx
possibilité de check « pannes de
CMCx », en utilisant le menu du CMCy
= si les 2 «< CMC1 » et
«< CMC2 » disponibles, mais « pas de
réponse » message
sur le MCDU, avec l'un de
CMCune panne permanente du l'un des 2
CMCs.
IV .4 .6 .2 Procédures
Chercher la panne d'un CMC
= essayer de déterminer le CMC master
le CMC master n'a pas «
test> »
Impression des rapports par Le CMC master «
CMCx printing »
1. Exécuter le scanning au sol « l'état
réel du computer »
2. Puis, Exécuter le ground report
3. Apres, Lire le TSD de différents rapports de vols
4. Ensuite, Exécuter le test
5. Apres, Exécuter une longue coupure de courant (C/B
tirés pendant un temps >5s)
6. Puis, Permuter les CMC pour confirmer
Si le système a un problème fonctionnel,
comparaison d'effets entre les deux CMCs : = si y a pas «<
» pour accéder au système, commuter le CMC
vers l'autre CMC, pour contrôler le fonctionnement
identique.
= Si le PFR est incomplet, commuter le CMCx
vers le CMCy, et contrôler si les
rapports sont
identiques, permuter les CMCs, ensuite contrôler de
nouveau les PFRs.
IV.4 .6.3 Sommaire d'écran du MCDU
|
Information
|
Source sur le MCDU
|
Système
|
|
P/N- S/N- A/C ident
|
LRU IDENT
|
rapport /test ATA 45
|
|
Pannes
stockées
|
Post flight report: pervious flights reports
Last leg report : ground report + TSD
associé
|
CMS
rapport /test ATA 45
|
|
Test d'unité
|
System test:
Ground scanning + TSD associé
|
rapport /test ATA 45
|

Figure IV.5 : l'écran du MCDU
IV .4 .6.4 Tous les renseignements utiles à
prélever
Il y a trois types de renseignements :
Nécessaire
Nécessaire pour un TS (trouble shooting) rapide et facile
Optionnel
IV.4 .6.1 Nécessaire
P/N computer S/N computer Date
A/C MSN (Manufacturer " fabricant "
Serial Number)
PFR/ TSD
Informations de LOG BOOK (livre de vol, ou journal de bord)
IV.4.6.2 Nécessaire pour un TS dépannage
facile
Ground report
Recomposable (imprimerie) / non recomposable
Confirmation d'élément
- C/B (6>s)
- Ground scanning
- rapport /System test
- Permutation
IV .4.6.3 Optionnel
- TSI (Time Sin ce
Inspection - temps depuis inspection-) - TSN
(Time Since New- temps
depuis neuf-)
IV.5 INSALLATION ET DEMONTAGE DU CMC (1TM1, 1TM2
On a parlé précédemment sur
l'opération de permutation du CMC 1/ (2), mais cette
dernière est une procédure, a des étapes bien
déterminée à les suivre, il faut qu'on sache d'abord
comment installer et démonter le CMC
En utilisant le TSM( Trouble
Shooting Manuel) avec le CMS, pour
trouver les étapes à suivre dans cette opération ;
Autrement dit comment exploiter le TSM et CMS dans la maintenance (comme nous
indique le schéma ci-dessus) :

Figure IV. 6 : schéma présentant
l'utilisation du TSM / CMS
IV.5 .A DEMONTAGE DU CMC (1TM1, 1TM2)
TACHE / TASK 45-13-34-000-801DEMONTAGE DU CMC
(1TM1, 1TM2)
1- référence d'informations et les
informations de travail depuis le TSM
|
Référence
|
|
Désignation
|
|
24-41-00-861-801
|
Alimentation des circuits elec de l'avion depuis l'alimentation A
de parc
|
|
45
|
-10 -00
|
-610 -804
|
Transmission de configurations avioniques
mémorisées au CMC opposé
|
|
45
|
-13- 34
|
-400 -801
|
Installation du CMC (1TM1, 1TM2)
|
|
45
|
-13- 34
|
-991 -001 FIGURE 401
|
2- les informations de travail
· montage d'assemblage
· test et matériel de support
· liste des outillages et équipements
3- les étapes de travail
AAlimentation des circuits électrique de
l'avion depuis l'alimentation de parc. BConfiguration d'avion
de la maintenance
Note : vérifier d'abord si
l'accès aux configurations avioniques mémorisées est
possible après faire le transfert de ces configurations au
CMC opposé, être sur que le transfert est fait
avec succès.
(1) être sur que le rapport de CONFIG CHANGE est
disponible (à travers le MCDU).
(2) Transmission de configuration avionique du
CMC 1(2) au CMC 2 (1)

Figure IV.7 : l'accès au CONFIG CHANGE du CMC
Cprend l'accès dans le compartiment avionique
· Mettre l'accès de la plate-forme dans la position
de la porte- d'accès 811
· Ouvrir la porte- d'accès 811
DOuvrir, les sauvegardes et les cosses de ses
disjoncteurs (1TM1 ou 1TM2) comme nous montre le tableau des disjoncteurs
suivant :
|
panneau
|
Désignation
|
FIN
|
localisation
|
|
POUR 1TM1
|
|
721 VU
|
CMC1 SWTG
|
4TM1
|
U07
|
|
742 VU
|
CMC1
|
3TM1
|
N72
|
|
POUR 1TM2
|
|
722 VU
|
CMC2
|
3TM2
|
D45
|
|
722 VU
|
CMC2 SWTG
|
4TM2
|
W40
|
4- procédures

Figure IV.8 : démontage du CMC
45 -13 -34
-991- 001 FIGURE 401 (TSM)
4.1 Démonter le CMC
desserrer les écrous (4)
les écrous inférieurs (4)
tirer le CMC (1) de son boîtier
(3) pour déconnecter les connecteurs électriques
(2)
démonter le CMC (1) de son
boîtier (3)
mettre le capot obturateur dans le déconnecté des
connecteurs électriques
Note : si on démonte le
CMC1 et on transfère les configurations avioniques
mémorisées au CMC2, on peut :
- démonter le CMC 2
- puis, installer le CMC2 à la place de
1.
IV.5. B INSTALLATION DU CMC (1TM1, 1TM2)
TACHE / TASK 45-13-34-000-801 INSTALLATION DU
CMC (1TM1, 1TM2
1- référence d'informations et les informations de
travail
|
Référence
|
Désignation
|
|
24
|
-41 -00- 861 -801
|
Alimentation des circuits elec de l'avion depuis l'alimentation
A de parc
|
|
45
|
-10- 00- 610- 802
|
Transmission du filtre de données de base au
CMC opposé
|
|
45
|
-10
|
-00 -610 -803
|
Mettre en service/hors service le filtre du PFR
|
|
45
|
-10
|
-00- 610- 806
|
Première mémorisation de configuration avionique
|
|
45
|
-10
|
-00 -610 -809
|
Procédure de charger les données de base du
CMC
|
|
45
|
-10
|
-00- 740 -801
|
Test de bite du CMC
|
|
45
|
-10
|
-00 -750- 801
|
Initialisation du UTC/Date
|
|
45
|
-10
|
-00 -860- 825
|
Procédure de prendre l'accès au rapport du
système / test
Page de maintenance
|
|
45 -13 -34 -991- 001 FIGURE 401
|
2- Pour les informations de travail c'est idem au
démontage
3- étapes de travail
AConfiguration d'avion de la maintenance
1- Alimentation les circuits électriques de l'avion
2- être sur que l'accès de la plate-forme est dans
la position de la porte- d'accès 811
3- être sur que la porte- d'accès 81 1est
ouverte.
Bsoit sur que les sauvegardes et les cosses des
disjoncteurs sont ouvertes (le tableau des disjoncteurs
précédent).
4 procédures
4.1 Installation du CMC
Nettoyer l'interface de composants et / ou la zone adjacente
Faire une inspection visuelle de l'interface de composants et /
ou la zone adjacente
Démonter le capot obturateur depuis les connecteurs
électriques
= Etre sur que les connecteurs électriques sont bien
nettoyés et dans une condition correcte
= Installer le CMC (1) dans son
boîtier.
= Pousser le CMC (1) dans son boîtier (3)
pour connecter les connecteurs électriques = Engager les écrous
(4) sur les cosses et puis serrer
= Etre sur que l'OBRM est correctement installé. Si n'est
pas le cas, pousser l'OBRM jusqu'à ce que le dispositif de verrouillage
est bloqué.
4. 2 Démonter les barrettes de connexion
et les cosses et fermer les disjoncteurs Pour 1TM13TM1, 4TM1
Pour 1TM23TM2, 4TM2
NOTE : Les CMCs utilisent IDENT
A/C depuis LAST LEG. Si on démonte les deux CMCs, IDENT
A/C ne se trouve pas dans l'en tête des rapports.
4.3 faire le test du BITE
NOTES :
= Si le test montre un message de panne classe 1 relié au
computer modifié pour l'avion par le remplacement du OBRM dans
l'atelier, on doit :
- démonter le computer
- le renvoyer à l'atelier
= si l'horloge est défective, on peut réinitialiser
UTC/ DATE dans le MCDU
= à travers le MDDU, on peut charger les données
de base (le filtre, sevicing report,
rapport de configuration de disquette) et s'il est
nécessaire, d'activer aussi les données
de base à travers ce dernier.
4.4 contrôle supplémentaire
- suivre la procédure montrée dans le schéma
suivant pour accéder à la page de maintenance.
- être sur que le P/N indiqué dans la page LRU IDENT
est identique au P/N du computer (indiqué à la face
arrière)

Figure IV.9 : l'accès au LRU IDENT
5 Fin de taches
A- configuration initiale
1- dans le MCDU, pousser la touche adjacente vers l'indication
RETURN jusqu'à avoir la page de maintenance 1/2
2- dans le MCDU, mettre le bouton BRT dans l'état OFF
B- fermeture d'accès
- Etre sur que la zone de travail est propre et dégager
les outils et les autres items - fermer la porte d'accès 811
- démonter l'accès de la plate-forme.
Dans cette étude j'ai pu tiré quelques conclusions,
en essayant de répondre aux questions posées dans la
problématique.
Que Le CMC a posé les bases de
nouvelles normes dans la maintenance, avec son rôle principal qui est la
centralisation et la mémorisation de toutes les pannes
détectées par le BITE de chaque système et son rôle
secondaire qui est :
Transmission de paramètres généraux
Dialogue avec le BITE
Interface d'utilisateurs
Le management du computer
La fonction interactive (rapport de vol PFR)
L'usage de maintenance facultatif (rapport d'entretien
SRR)
Son installation sur l'A330/ A340 non seulement a garanti la
sécurité et la réduction du coût d'exploitation
mais, argument choc, devrait même empêcher les pilotes de faire les
fautes de manipulation, (C'est pour cela on le nomme le mouchard). Donc
minimiser aussi le coût de formation des pilotes.
Ces avantages qui sont :
Réduire la durée des opérations.
Réduire la durée de formation de l'équipe de
maintenance
Réduire le nombre de l'équipe de maintenance
Simplification des documentations techniques
Standardisation des équipements
Sans oublier bien sur de citer quelques inconvénients :
Le CMC c'est un ordinateur qui vaut cher.
La réparation de ces cartes est très
coûteuse.
Malgré que dans les instructions de la
MEL, l'avion peut voler sans CMC, mais je
pense que l'installation de cet équipement à bords des avions est
éminente, car il a amélioré les taches de la maintenance
par l'intervention rapide du personnel en un court délai.
En fin, j'espère que ce mémoire sera un outil
considérable pour les prochains étudiants de mon
département, souhaitant aussi qu'il va enrichir notre
bibliothèque.
ANNEXE A : REGLEMENTATION D'ENTRETIEN
I- Présentation de la MEL
La MMEL (Master Minimum Equipment List)
représente un listing des équipements qui peuvent dans certaines
circonstances être inopérants ; ainsi que les limitations
auxquelles est soumis l'aéronef dans ces circonstances.
Une MEL (Minimum Equipment List),
dérivée de la MMEL est établie par la Direction des
Opérations Aériennes et transmise au sous direction (S/D)
assurance qualité pour lancement du processus d'approbation
auprès de la DACM (direction de l'aviation civile et de la
météorologie)
Application de la MEL
Dans la MEL les actions correctives peuvent être
différées selon la classification du système ou de
l'équipement mis en cause.
|
Classe
|
LIMITES AUTORISEES POUR LE TRAITEMENT DE
L'ANOMALIE
|
|
A
|
L'action corrective doit être effectuée à
l'échéance définie en remarque
|
|
B
|
L'anomalie devra être traitée dans les 3 jours
suivant la découverte de l'anomalie
|
|
C
|
L'anomalie devra être traitée dans les 10 jours
suivant la découverte de l'anomalie
|
|
D
|
L'anomalie devra être traitée dans les 120 jours
suivant la découverte de l'anomalie
|
Gestion des limitations MEL
Les limitations données par la MEL pour l'exécution
des actions correctives doivent être reportées sur la HIL
« Hold Item List »
(Ce document représente la liste des tolérances en courrier).
L'action corrective devra être exécutée
avant l'expiration de la limitation MEL.
Le responsable qualité devra
s'assurer que les délais MEL ne sont pas dépassés
II- Définitions de quelques termes
TFU "Technical Follow
Up" :c'est un document qui englobe toutes les pannes
des
équipements et ces procédures de
réparation et qui permet d'échanger les informations techniques
entre les opérateurs de chaque compagnie pour adresser au ISP « In-
Service problem » et donner à la fin une forme précise qui
concerne:
Description des problèmes pour chaque système
donné
Description de la solution des problèmes
Associé le document de référence
réajusté (SB, SIL, etc.) quand il est applicable Le TFU est
identifié en utilisant l'ATA référence (6digits), suivi
par le numéro de série de chaque équipement.
SB Service Bulletin : Document
émis par un OEM (Original
Equipment Manufacturer) vers l'utilisateur de
cet équipement pour préconiser des modifications en vue
d'améliorations techniques.
SIL : Service
Information Letter : identique au
SB, il contient toute les informations techniques de
modifications, délivrées par les concepteurs.
ANNEXE B: Electronique Digitale: watch dog, RS-232&
tp 80386
En électronique numérique ,un chien de garde
(watching garde) est un circuit électronique ou logiciel destiné
à s'assurer qu'un automate ou un ordinaterur ne reste pa bloqué a
une étape particuliére du traitement qu'il effectue . c'est une
protection destinée généralement à redémarer
le systéme , si une action définie n'est pas
exécutée dans un délai impartit .
En i,formatique industrielle le chien de garde est suovent
réalisé par un dispositif électronique ,
en géneral une bascule monostable .il repose sur le principe que ,chaque
étape du traitement doit s'exécuteren un temps maximal . A chaque
étape le systéme arme une temporisation avantson
éxécution .sila bascule retourne à son état
stableavant que la tàche ne soit pas achevée , le chien de garde
se déclenche, il met en oeuvre un systéme de scours qui peut soit
déclencher une alarme , soit faire redémarer l'automate , soit
mettre en marche un systéme redondant ... .les chiens de garde sont
souvent intégrés aux microcontroleurs et aux cartes méres
dédiées au temps réel.
Quand il est réalisé par logiciel, il s'agit en
général d'un compteur qui est
régulièrement remis à zéro. Si le
compteur dépasse une valeur donnée (timeout) alors on
procède à un reset (redémarrage) du
système. Le chien de garde consiste souvent en un
registre qui est mis à jour via une
interruption régulière. Il peut également
consister en une routine d'interruption qui doit effectuer certaines
tâches de maintenance avant de redonner la main au programme principal.
Si une routine entre dans une boucle infinie, le compteur du chien de garde ne
sera plus remis à zéro et un reset est ordonné.
Le chien de garde permet aussi d'effectuer un redémarrage si aucune
instruction n'est prévue à cet effet. Il suffit alors
d'écrire une valeur dépassant la capacité du compteur
directement dans le registre. Le chien de garde lancera alors le reset
II. LE BUS RS 232
La liaison série aux normes RS 232 est utilisée
dans tous les domaines de l'informatique (ex : port de communication com1 et
com2 des PC, permettant la communication avec des périphériques
tels que modem et souris). Elle est de type asynchrone, c'est à dire
qu'elle ne transmet pas de signal horloge. Le schéma fonctionnel est le
suivant :

schéma synoptique de la liaison aux normes RS232
La transmission série nécessite un minimum de 2
fils comportant les trames de données en émission (Tx) et en
réception (Rx).
L'adaptation des données se fait à l'aide d'un
circuit adaptateur de ligne.
Protocole de transmission
Afin que les éléments communicants puissent se
comprendre, il est nécessaire d'établir un protocole de
transmission. Ce protocole devra être le même pour les deux
éléments afin que la transmission fonctionne correctement.
Paramètres rentrant en jeu :
· Longueur des mots : 7 bits (ex :
caractère ASCII) ou 8 bits
· La vitesse de transmission : les
différentes vitesses de transmission sont réglables à
partir de 110 bauds (bits par seconde) de la façon suivante : 110 bds,
150 bds, 300 bds, 600 bds, 1200 bds, 2400 bds, 4800 bds, 9600 bds.
Dans le cas du CMC la vitesse est : 9600 bds
· Parité : le mot transmis peut
être suivi ou non d'un bit de parité qui sert à
détecter les erreurs éventuelles de transmission. Il existe deux
types de parité (parité paire et impaire). Dans notre cas la
parité doit être impaire comme l'ARINC 429.
· Bit de start : la ligne au repos est
à l'état logique 1 pour indiquer qu'un mot va être transmis
la ligne passe à l'état bas avant de commencer le transfert. Ce
bit permet de synchroniser l'horloge du récepteur.
· Bit de stop : après la
transmission, la ligne est positionnée au repos pendant 1, 2 ou 1,5
périodes d'horloge selon le nombre de bits de stop.
·

Début d'1 nouveau caractère
Etat
ralenti de la ligne
Retour à l'état ralenti de la ligne
III. MICROPROCESSEUR 80386 :
Présente le 16 juin 1988 .
· Vitesse d'orloge :
16MHz pour 2.5 MIPS
1/25/1989 20 MHz pour 2 .5 MIPS ,25 MIPS pour 2.7
MIPS
10/26/1992 33 MHz pour 2.9 MIPS
· Architecture interne en 32 bits .
· Largeur du bus extréme sur 16 bits
.
· Nembre de transistors 275 000 à1 JLm
.
· Memoire adressable 16 Mo .
· Memoire virtuelle 256 Go .
· La largeur du bus extreme sur 16 bits permet
lafabrication à cout réduit d'un processeur 32 bits .
· Multitàche incorporé.
· Utilisé dans les ordinateursde bureau
d'entrée de gamme et les ordinaterurs portable .
Bibliographie et webographie
Bibligraphie :
AIRBUS INDUSTRIE, traning &
fight opération supprt division
A 330-200 techniacal training manual- 45 On Board Maintenance
Systms(à partir du CD del' A33O-2OO chapitre 45)
Webographie : www.
AirALgerie-dz
le site de documentation interne d' Air ALgerie(les
manuels de la maintenance ):
www.192.168.12.12.com
( intranet)
communications protocols in aeronautis- George
Novacek
http://www.chipcenter.com
/circuitcellar/may01/c0501 GN1 . htm
ARINC 429 protocol tutorial
http://
www.429-ARINC.com/ARINC-tutorial.html
le microprocesseur 80386
http://
www.wikipedia.org.fr
/wiki/microprocesseur
htt://
www.
content.
airbus.com/engineering/esites/avionics
simulation/01docs/A340/cms.htm
http://www.airbus.com/en/aircraft
families /a340a 330 /a33 0-2OO / http:// www.rfi.fr/
actufr/article/0 76/article_4289 7. asp
www.avation-civile.gouv.fr/htm/
actu_gd_ta/libe_ta_ htm
GLOSSAIRE
ACARS ----- AIRCRAFT COMMUNICATION ADRESSING AND
REPORTING SYSTEM
ACMS --------- AIRCRAFT CONDITION MONITORING SYSTEM ADF
------------ AUTOMATIC DIRECTION FINDER
ADR ----------- AIR DATA REFERENCE
ADV ------------ ADVISORY
AEVC ---------- AVIONICS EQUIPEMENT VENTILATION COMPUTER
AAMDT-------- AMENDEMENT
AMM ----------- AIRCRAFT MAINTENANCE MANUAL AMU
------------ AUDIO MANAGEMENT UNIT
AOG ------------ AIRCRAFT ON GROUND
APU ------------- AUXILIARY POWER UNIT
ARINC --------- AERONAUTTICAL RADIO
INCORPORATED
ASIC ------------ APPLICATION SPECIFIC INTEGRATED
CIRCUIT
ATA ------------- AERONAUTICAL TRANSPORT ASSOCIATION ATC
------------- AIR TRAFFIC CONTROL
ATE-------------- AUTOMATICS TEST EQUIPEMENT
ATP-------------- ATLAS TEST PROCEDURES
BCL ------------- BATTERY CHARGE LIMITER BFE ------------
- BUYER FURNISHED EQUIPENT BITE ----------- - BUILT-IN TEST
EQUIPENT
BMC ----------- - BLEED MONITORING COMPUTER BSCU
------------ BRAKING STEERING CONTROL UNIT C/B --------------- CIRCUIT
BREAKER
CAATS ---------- COMPUTER ASSISTED AIRCRAFT TROUBLE
SHOOTING CBMU ----------- CIRCUIT BREAKER MONITORING UNIT
CCR ------------ -CONFIGURATION CHANGE REPORT
CIDS ------------- CABIN INTERCOMMUNICATION DATA
SYSTEM
CMC --------------CENTRAL MAINTENANCE COMPUTER CMM
------------- COMPONENT MAINTENANCE SYSTEM CPU --------------- CENTROL PROCESS
UNIT
CMS -------------- CENTRAL MAINTENANCE SYSTEM CPC
--------------- CABIN PRESSURE CONTROLLER
CPMS ------------- CABIN AND PASSENGER MANAGEMENT
SYSTEM
CRC --------------- CYCLIC REDUNDANCY CHEK
CRC---------------- CYCLIC REPETITIVE CHIME DB/N --------------- DATA BASE
NUMBER
DC ------------------ DIRECT CURRENT
DCR ---------------- DISKETTE CONFUGRATION
REPORT
DFDRS ------------- DIGITAL FLIGHT DATA RECORDING
SYSTEM
DGI ---------------- - DIGITAL INPUT
DGO -------------- DIGITAL OUTPUT
DISC -------------- - DISCRETE
DMC ------------- -- DISPLAY MANAGEMENT COMUTER DME
--------------- DISTANCE MEASURING EQIPMENT DMU -------------- - DISPLAY
MANAGEMENT UNIT
DSI -------------- --- DISCRETE INPUT
DSO -------------- DISCERTE OUTPUT
DU ---------------- - DISPLAY UNIT
E/WD ------------- - ENGINE /WARNING DISPLAY
ECAM ------------- ELECTRONIC CENTRALIZED AIRCRAFT
MONITORING ECB ---------------- ELECTRONIC CONTROL BOX
ECMU ------------- ELECTRONIC CONTACTOR MANAGEMENT
UNIT
ECP ---------------- ECAM CONTROL PANEL
ECR ----------------EQUIPMENT CONFUGRATION REPORT ECSB
------------- -EMBEDDED COMPUTER SYSTEM BUS EEC ---------------- ELECTRONIC
ENGINE CONTROL EEPROM --------- ERASABLE PROGAMMABLE ROM
EFCS --------------- ELECTRICAL FLIGHT CONTROL SYSTEM
EFIS ---------------- ELECTRONIC FLIGHT INSTRUMENT SYSTEM
EIVMU ----------- - ENGINE INTERFACE AND VIBRATION
MONITORING UNIT FDIU --------------- FLIGHT DATA INTERFACE UNIT
FDRS --------------- FLIGHT DATA RECORDING
SYSTEM
FCDC -------------- FLIGHT CONTROL DATA
CONCENTRATOR
FCMC -------------- FUEL CONTROL AND MONITORING COMPUTER
FDIU ---------------- FLIGHT DATA INTERFACE UNIT
FDU ----------------- FIRE DETECTION UNIT
FIFO ---------------- FIRST IN FIRST OUT
FIN ------------------ FUNCTIONAL ITEM NUMBER
FMGEC ------------ FLIGHT MANAGEMENT GUIDANCE AND ENVELOP
COMPUTER
FMS ------------------ FLIGHT MANAGEMENT SYSTEM F/O
---------------FIRST OFFICER
FWC ----------------- FLIGHT WARNING COMPUTER FWS
------------------- FLIGHT WARNING SYSTEM GEM ------------------ GROUND
EQIPMENT MANUAL GND ----------------- GROUND
GPCU ----------------- GROUND POWER CONTROL
UNIT
GPS -------------------- GLOBAL POSITIONING WARNING
SYSTEM GPWS ----------------- GROUND PROXIMITY WARNING SYSTEM HF
---------------------- HIGH FREQUENCY
HS ---------------------- HIGH SPEED
HSMU ----------------- HYDROLIC SYSTEM MONITORING UNIT
ILS --------------------- INSTRUMENT LANDING SYSTEM
IMS -------------------- INTERGRATED MAINTENANCE SOFTWARE
IPC ----------------- --- ILLUSTRATED PARTS CATALOG
LCD ------------------- LIQUID CRYSTAL
DISPLAY
LEG --------------------MAINTENANCE FLIGHT CONDITION
LGCI------------------- LANDING GEAR CONTROL INTERFACE UNIT
LIFO LAST IN FIRST OUT
LR ------------------- LONG RANGE
LRU LINE REPLACEBALE UNIT
LS ---------------------- LOW SPEED
LSB --------------- LEAST SIGNIFICANT BIT
LSP -------------------- LIGHTNING STRIKE PROTECTION MCU
----------------- - MODULAR CONCEPT UNIT
MCDU ---------------- MULTIPURPUSE CONTROL AND DISPLAY
UNIT MDDU ---------------- MULIPURPUSE DISK DRIVE UNIT
MEL MINIMUM EQUIPMENT LIST
MFT MAINTENANCE FILTER TOOL
MICBAC MICROSYSTEM BUS ACCESS CHANNEL
MMEL MASTER MINIMUM EQUIPMENT LIST
MLS MICROWAVE LANDING SYSTEM
MN -MINUTE
MOT MAITTENANCE OPTION TOOL
MS -------------------- -- MILLISECOND
MSB --------------------- MOST SIGNIFICANT
BIT
MSN --------------------- MANUFACTURER SERIAL NUMBER ND
------------------------ NAVIGATION DISPLAY
NMI ---------------------- NON-MASKABLE
INTERRUPT
NO NORMALLY OPEN
NU NOT USED
NVM NO VOLATILE MEMORY
OBRM ON BOARD REPLACEBALE MODULE
OC OPENED CIRCUIT
OMS ON BOARD MAINTENANCE SYSTEM
P/B PUSH BUTON
P/N PART NUMBER
PES PASSENGER ENTERTAINMENT SYSTEM
PFD --------------------- - PRIMARY FLIGHT
DISPLAY
PFR -------------------- PREVIOUS / POST FLIGHT
REPORT
PHC --------------------- PROBE HEAT COMPUTER
PNR PART NUMBER
POST ------------------ - POWER ON SELF TESTS
PP ---------------------- - PIN PROGRAMMING
PSCU ----------------- -- PROXIMITY SWITCH CONTROL UNIT
QAT -------------------- QUADRUPLE ARINC TRANSMITTER RA -----------------------
RADIO ALTIMTER
RDI ---------------------- REFERENCE DESIGNATOR INDEX RE
----------------------- FOR REFERENCE ONLY
REF --------------------- FOR REFERENCE
RMP --------------- RADIO MANAGEMENT PANEL
RMP --------------- RIGHT MIDDLE PLUG
RMR ------------------ - REPLACEBEALE MODULE
REPRORAMMER
RX RECEPTION
S/N ------------------- SERIAL NUMBER
SAM SIGNIAL ARNIC MODLATOR
SB SERVICE BULLETIN
SC ----------- SIGNIAL CHINE
SD ------------------------ SYSTEM DISPLAY
SDAC ----------------- -- SYSTEM DATA ACQISITION
CONCENTRATOR SDCU ---------------------SMOKE DETECTION CONTROL COMPUTER SEL
----------------------- SELECTED
SFCC --------------------- SLAT FLAP CONTROL COMPUTER
SIL ------------------------ SERVICE INFORMATION LETTER
SMILE-------------------- SURVEILLANCE OF THE EMBEDDED SOFTWARE
SNR ----------------------- SERIAL NUMBER
SRU ----------------------- SHOP REPLACEABLE UNIT STD
------------------------ STANDARD
STS ------------------------- STATUT
TFAS ---------------------- TRAFFIC COLLISION COMPUTER
TFU -------------------------TECHNICAL FOLLOW UP
TO TAKE OFF
TPIC TYRE PRESSURE INDICATING COMPUTER
TR ------------------------- TRANSFORMER RECTIFIER TSD
------------------- --- TROUBLE SHOOTING DATA TSI ------------------------ TIME
SINGLE INTERVENTION
TSM ---------------------- TROOUBLE SHOOTING MANUAL TSN
-------------------- - TIME SINGEL NEW
TX ------------------------ TRANSMISSION
UART -------------------- UNIVERSAL ASYNCHRONOUS RECIVER
/TANSMITER UL ------------------------ UPPER LEVEL
USART ------------------ UNIVERSAL SYNCHRONOUS /
ASYNCHRONOUS RECEIVER / TRASMITER
UTC ---------------------- UNIVERSAL TIME COORDINATE VHF
---------------------- VERY HIGH FREQUENCY
VOR ---------------------- VHF OMNDIRECTIONAL RANGE VSC
----------------------- VACUM SYSTEM CONTROLLER
WBC ---------------------- WEIGHT AND BALANCE COMPUTER
WHC ---------------------- WINDOW HEAT COMPUTER
WRG ---------------------- WIRING
WXR WEATHER RADAR
X-TALK CROSS-TALK
| 

