|
?e?????q?? ????s?????
????ster? ??
????s????????t ???éri??r,
???l????e??e?S???n??fiq?e?et??e ?a?????????c
U????rs?té ??
? \u9670·?????r? a ??rt????
Ecole Superieure de la Statistique et de
l'Analyse de l'Information

Projet de Fin d'Etude
EsTIMATION NON-PARAMETRIQUE PAR NOYAUX
AssOCIIs
ET DONNEEs DE PANEL EN MARKETING
Pres??te ??r?:
I??? BEN KHALIFA
??s ?? ??r??t?? ???
Celestin C. KOKONENDJI, HDR
U????rs?te ?? P?? ?t ??s
P?\u9313‡As ?? ????r
???r?t?r? ??
??t?e??t?q??s ?????q?e?s ?- U?? ????
?\u9670·??
E-mail:
celestin.kokonendji@univ-pau.fr
Dhafer MALOUCHE, MA
???? ??er???r? ?? ??
?t?t?st?q?? ?t ?? ??????\u9313‡As? ??
???r??t??
E-mail:
dhafer.malouche@essai.rnu.tn
Résumé
Dans ce rapport, nous nous interessons a la notion destimation
non-parametrique d'une densite (fonction de masse) inconnue sur ? ?
R par la methode des noyaux associes. Pour ce faire,nous presentons
dabord une definition(unifiee)dun noyau associeà une loi de
probabilite quelconque (continue ou discrete) Nous
etudions de maniere detaillee quelques exemples des
noyaux continus
symetriques(????? normal,
Epanechnikov, etc.), continus asymetriques (?????
beta, gamma, gaussien-inverse et
gaussien-inversereciproque), discret categoriel
(Aitchison & Aitken 1976) et discret de denombrement (?????
triangulaires symetriques, standards
asymetriques dordre 1 tels que Poisson,
binomial et binomial negatif). Ensuite,nous donnonsla definition
delestimateur noyau associe. Nous montrons la convergence
ponctuelle de cet estimateur Nous verifions si cet estimateur est bien de masse
totale egale lunite Dautres proprietes (globales) sont
etudiees, telles que biais, variance et erreur
quadratique moyenne integree. Nous
proposons une extension dans le cas multivarie (? ? Rd) pour des
fonctions de densite (fonction de masse) et de regression. Enfin
nous illustrons une partie de la methode sur des donnees de panel en
marketing, lesquelles donnees sont de comptage
et parsemees.
?ts ??es? ?\u9313‡A?? ?ss??e????etr?
????ss????????i???a???????er??u
???d?a?i???\u9313‡A??????te?re??
???é?s ??rs??e?s
Abstract
In this report, we are interested in the notion of
nonparametric estimation of an unknown density (mass function) in ?
? R by using associated-kernel method First we present an
unified definition of a kernelassociated to a
probabilitylawthatmight be
eithercontinuousordiscrete.Then,weprovideathoroughtreatmentofsomesymmetric
andcontinuouskernels(?????Gaussian,Epanechnikov,etc.)
asymmetricandcontinuous (????? beta, gamma, inverse
gaussian, reciprocal inverse gaussian) ; discrete
categorical (Aitchison & Aitken,1976) and discrete count data
(????? symmetric triangular,or some
knownasymmetricdistributionssuchasPoisson,binomialandnegativebinomial)Furthermore,
we define the associated kernel estimators and investigate some of
their finite
andasymptoticproperties.Morepreciselyweverifyiftheproposedestimatorsarebona
fidedensitiesormassfunctions(i.efunctionswhicharesimultaneouslynonnegativeand
integrate/sum up to one). Their pointwise consistency
bias, variance and mean integrated squared error are
tackled as well Moreover we extend these estimators to the multivariate
setting ? ? Rd for both density/mass and
regression functionsFinallythe practical usefulness of
this approach is illustrated by a case study based on
some sparse count data obtained from a marketing panel research
survey
?\u9313‡A ?r?s? ?ss???t?? ??r????
s?t???? ???????t?? ???a? ??a??????
???? ?n??g?a?? sq??r?? ?rrr?
s??rs? ??t??
Remerciements
J???r? ???t??? a ????re?????
?? s??s ?\u9312‡@trê?????t ???r??s? ????r ???????
?? ????i ç?ça, ?? ???t ?? ??
?a?i????r? ?????t???? ?? r????r??? ?? ????s?r
??????q???t????? ??s ? ?é??es?it ??e
????nt ???????s ??r q?? ??
???ss? s???r ?? q?? ?? ???r???? ?? q?? ??es ???
?u?? ?? ????i?i ??? ???st ?? r????r???? ??
??et??s ??s ?????? ?? ?é??t ???t ?? ?v?? ?d? e??i
???u???i?e??e ????ts ?e????s??ts ???? ??s
???s??s??r ?tt???r?????s??i??? (?a??????
P?r ??s ????ts ???????????s?
?? t???s t?t ????r? d r???r???r Ce??st?? C?
K??????? ?????r ?????re ?? tr????? ??????????? ??
???et????? ????t??s??s?? ?tet ??
??s???????it? ; M?r?? C???st?? ??r
t???????? ??????r??\u9312‡@? ??r t?s ??s
?\u9313‡A??s q?? t? ?s ??s a ??
??i?s?i??? ??u ?????i ???t ????????
?????r t???rs s? r???t?r ?? r?????? ??
????i?r????é ??e ??n???l
???ses? ????? ?? t? r???r??? ??r ?stes
???s ????r??????tt ?e ?e ?ot ????u?
?? s??s ??rt?????ar????t r??????ss??t? a
D????r M?????? ??r t?t? ?????? q????
??????rte ??tt? ???e?? M?r?? D????r
??r t?t? ?? ??????? ??s ??ss? ?? r???r???r ???????r??s????t
t?t ??s ??s??????ts?
???\u9312‡@?r??? ??s r???r??????ts ??s
???s ???s C B??????? A???s ??r s?
s\u9313‡A???t???? s? t????t
?? ?e?????? ?t s? t????
?\u9312‡@???t????????; M?r?? B???????
??r t? ??????? ?t t?s ????r??????ts ?? r???r??? ?
??r??rt ??stér??? ?r??es??u ??
??a??e??? a ????????er???r? ?? ????r?? ??
P??? ?? ??s ???r ??r?? ?tet
?\u9312‡@???q?é ?? ?de???l ?e
???é?s?
??s r???r??????ts ??t e???????t a
Tr?st?? S???? K??sse? ??r s?
???e???t???? s?t???? M?r?? Tr?st?? ??r ??s ????ts
?? ?e?????r? ??s ?????s
??s??ss??s? ??sles ????r??????tt ?e ?
???????it?
M?r??? Z???? ??? ??rs??? q??
???? ?? ?? ?????? ?? ??s??ér?r ???? ???? ??????????? M?r?? M?r???
??r t?s ??s???s? t? s???????t? ???s??? ?tet ?e
??????e ??oo?
L??? Gr???rs??t??
L?\u9313‡A?? L?\u9314‡B???? A??
S?????? D????? G?s??r ?t a t?s ???\u9312‡@
q?? ??? ???? ????s?r ?? ?ot\u9313‡A?r
??r??t q??tr?s ??l
M?r?? P??? & M???? ??r ??????s ??
r??s?s? ??s ?? ????\u9314‡B ??r ??rs
??r ??? t??t ?????r ?t ?? ???????
M?r?? ?? ???r ?rar? A???? ??r t?t
??????r q?? t? ??r?s? ??r ??s
r??????s? ?e ??t?t?s
s?r?r?s?s ?t ??r t?s ?????s?
?? ?? s??s ??s ?????t
?\u9312‡@?r???r s????????t ??cc
q?? ??je ??ff d ??e
???u ??,a?e ??n?e???t? H?s??? ??t?
AT???t ?t a ?? ??r???? R????. M???? M?r?? ??r ????? ?t
??? r??s?s?
U? M?r?? tras ???r ??r ??s s???rs ???s
Rima, Myriam & Omar.
U? ?r??? M?r?? ??ss?
??r t?s ???\u9312‡@ ?t ?????s q?? ??????t?
Table des matières
Présentation générale du
stage 13
1 Introduction a l'estimation non-paramétrique
15
2 Noyau continu
symétrique 17
2.1 Cas univarié .................. . . .. . . . . . . . .
. . 17
2.1.1 Propriétés élémentaires.
. . . . . . . . . . . . . . . . 18
2.1.2 Biais ponctuel . ... . . . . . . . . . . . . . . . . . . .
. . . . . . 19
2.1.3 Variance ponctuelle .... . ... . .. . . .. . . . . .
. . . . . 21
2.1.4 Erreur quadratique moyenne
(MSE) 22
2.1.5 Erreur quadratique moyenne
intégrée (MISE) 22
2.1.6 Choix du noyau .......... . .. . . .. . . . . .
. . . . . 23
2.1.7 Choix de fenêtres . . . . . . . . . . . . . . . . . .
. . . . . . 24
2.1.8 Simulation des données . . . .. . . . . . . . . . .
. . . . . 30
2.2 Cas multivarié........... . ... . .. . . . . . . . . .
. . . . . 31
3 Noyau associé continu
asymétrique 35
3.1 Cas univarié ................ . .. . . .. . . . . . .
. . . . 35
3.1.1 Définition ........................... . .. 36
3.1.2 Propriétés élémentaires.
. . . . . . . . . . . . . . . . 38
3.1.3 Biais ponctuel.................. . .. . . .. . . .
41
3.1.4 Variance ponctuelle .... . ... . .. . . .. . . . . .
. . . . . 42
3.1.5 MISE .... . ... . . . . . . . . . . . . . . . . . . . . . .
. . . 43
3.1.6 Exemples ................ . . .. . . . . . . . . . . 43
3.2 Cas multivarié........... . ... . .. . . . . . . . . .
. . . . . 63
4 Noyau associé discret 65
4.1 Noyau associé discret pour des
données catégorielles 68
4.2 Noyau associé discret pour des
données de comptage 73
4.2.1 Noyau associé poissonien . . 73
4.2.2 Noyau associé binomial. . . . . . . . . .
. . . 75
4.2.3 Noyau associé binomial
négatif . 77
4.2.4 Noyau associé triangulaire . .
. . . . . . 78
4.2.5 Choix de fenêtres .... . . .. . . . . . . . . . . . .
. . . 83
4.3 Noyau associé discret multiple. . . 85
? ?e?r?ss?? ???t???? a
?\u9313‡A??\u9312‡@ ?ss??is ??\u9312‡@t?e ??87
5.1 Estimateur de Nadaraya-Watson 87
? ???e?s ?? P???? a ??et??? ??
6.1 Notions elementaires
· . . . . . . . . . . . . . . .
. .. . . 89
6.2 Traitements preliminaires . . . . . . . . . . . . . . .. . .
90
6.2.1 Repartition des panelistes selon les variables
caracteristiques . . 92
6.3 Application . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 96
6.3.1 Dans le cas d'un estimateur a noyau associe
triangulaire . . . . 96
6.3.2 Dans le cas d'un estimateur a noyau associe
binomial 97
? ?????s??s ?t ??rs???t???s ???
7.1 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 103
7.2 Perspectives . . . . . . . . . . . . . . . . . . . . . . . .
. . . . .. 103
? ????\u9312‡@? ?? ???????s s?s ?? ??????? ? ???10
Table des figures
2.1 Illustration des noyaux continus
symétriques 19
2.2 Estimation totale a noyau
gaussien . 20
2.3 Illustration d'un phénomêne de
sous-lissage lors de lestimation dune
densité.............. . ... . . . . . . . . . . . . . . .
. . 24
2.4 Illustration d'un phénomêne de
sur-lissagelors delestimation duneden-
sité..................................... . 24
2.5 Illustration d'une estimation idéale . . . . 25
2.6 Lissages par des estimateurs a noyaux
continus de la distribution dun
échantillon de loi normale centrée réduite,
n = 100 et hPj = 0.338 . . . 31
2.7 Lissages par des estimateurs a noyaux
continus de la distribution dun échantillon de loi normale
centrée réduite, n = 100 et hCV = 0.429 . . . 32
2.8 Comparaison des lissages par lestimateur a noyau continu
d'Epanechni-
kov en faisant varier la fenêtre h 33
3.1 Densité de loi normale centrée .. . . .. . . .
. . . . . . . . . . . . 36
h = 1.5
3.2 Illustration de la densité normale pour et x
varié . . . . .
= . 37
y
x = 2.1 h
3.3 Illustration de la densité normale pour et
varié 38
3.4 Allure générale d'une densité
gamma. . . . . 44
h = 0.2
3.5 Allure du noyau x
associé gamma pour et varié 45
= 2
3.6 Allure du noyau associé gamma
pour x = y et varié .
h . . . . . . 46
3.7 Allure générale de la densité
bêta. . . . . . . . . . 51
3.8 Allure du noyau associé bêta pour h =
0.2 et x varié 52
3.9 Allure du noyau associé bêta pour x =
y = 2 et h varié 53
3.10 Allure générale de la
densité gaussienne inverse 57
3.11 Allure du noyau associé
gaussien inverse pour h = 0.1 et x varié 58
3.12 Allure du noyau associé
gaussien inverse pour x = 2 et h varié 59
3.13 Allure générale de la
densité gaussienne inverse réciproque
61
3.14 Allure du noyau associé
gaussien inverse réciproque pour x = 2 et h
varié 62 4.1 Illustration de la loi d'Aitchison et Aitken 70
h = 0.2
4.2 Illustration du noyau associé dAitchison et
Aitken pour et x varié 71
4.3 Illustration du noyau associé dAitchison et
Aitken pour x = y = 2 et h
varié..................................... . 72
h
4.4 Illustration du noyau associé =
poissonnien 0.1
pour x
et .
variée . . . 73
h =
4.5 Illustration du noyau associé binomial pour
.
0.1 et .
x varié. .
. . . 75
4.6 Illustration du noyau associé binomial pour
x == y7 et h varié 76
4.7 Illustration du noyau associé binomial
négative pour h = 0.1 et x varié 78
4.8 Illustration du noyau associé triangulaire pour
différentes valeurs de h. . 80
4.9 Illustration du noyau associé
triangulaire sans modification du bras 81
4.10 Illustration du noyau associé
triangulaire avec modification du bras 82
6.1 Dispersion des clients selon le lieu d'habitation 93
6.2 Localisation des panélistes du magasin 1
93
6.3 Catégorie socio-professionnelle des
panélistes et actes dachats 94
6.4 Revenu net des panélistes du magasin 1
94
6.5 Répartition des clients du magasin 1 selon
la taille du foyer 95
6.6 Taille de famille des panélistes du magasin
1 95
6.7 Comportement des achats individuels pendant la
premieretranche 96
6.8 Comportement des achats pendant la deuxiême tranche
97
6.9 Estimation des actes d'achats pour la premiere période
97
6.10 Estimation des actes d'achats pour la deuxiême
période 98
6.11 Estimation de la premiere période agrandie
. 98
6.12 Estimation de la premiere période plus
agrandie 99
6.13 Estimation des actes d'achats pour la premiere
période 99
6.14 Estimation des actes d'achats pour la deuxiême
période 100
6.15 Estimation des actes d'achats de la premiere période
agrandie (150 ob-
servations) ................ . ... . . . . . . . . . . . . . .
101
6.16 Estimation des actes d'achats de la premiere période plus
agrandie (50
observations) .............. . . .. . . . . . . . . . . . . .
102
Liste des tableaux
2.1 Exemples de noyaux continus
symétriques 18
2.2 Efficacité des noyaux continus
symétriques 23
3.1 Tableau récapitulatif des lois de probablité
continues asymétriques 39
4.1 Solutions associés standards
h0 pour les discrets
noyaux 86
6.1 Tableau comparatif du marketing transactionnel et
relationnel 90
6.2 Statistique descriptives fondamentales 92
Présentation générale du stage
J'ai effectué mon stage de fin
d'étude au sein du laboratoire de mathématiques
appliquées, département Statistique et
Traitement Informatique des Données STID) Ce
département regroupe 7 enseignants et
enseignantes tous sous la direction du chef de département.
Le STID offre un enseignement théorique assurant
une solide formation de base ainsi qu'une initiation à la
recherche
Mon stage s'est déroulé du
1er février jusqu'à 29 mai, sous
la direction de M Kokonendji. Dés mon arrivée, mon
encadreur direct ma expliqué le sujet ma fait
visité le département, m'a accordé un bureau et m'a
éclairci le régime du travail.
Tout aulong de ce stage, j'ai
assisté au séminaire hebdomadaire de léquipe
probabilités et statistique on j'ai eu l'occasion
de présenter montravail.
Durant ces quatres mois passés au sein du
STID jai eu lopportunité de découvrir le métier
du chercheur sous toute ses formes et de comprendreles
difficultésquipeuvent être rencontrées.

Chapitre 1
Introduction a l estimation
non-paramétrique
L'objet principal de la statistique est
de faire a partir dobservations dun phénomène aléatoire,
une inférence au sujet de la loi
générant ces observations en vue danalyser
le phénomène ou de prévoir un événement
futur Pour réduire la complexité du phénomène
étudié, nous pouvons utilisé deux approches
statistiques non-paramétrique et
paramétrique.
Dans le premier cas, nous considérons que
linférence statistique doit prendre en compte la
complexité autant que possible et donc cherche a estimer la
distribution du phénomène dans son
intégralité,mettant en oeuvre lestimation des
fonctionnelles(densités, régression, etc.). En
opposition lapproche paramétrique cherche a
représenter la distribution des observations par une fonction
densité f(x|è) on le paramètre è est la seule
inconnue. Dans plusieurs cas l'approche non paramétrique est
préférable nous pouvons mettre en oeuvre des lois de
probabilité sur des espaces fonctionnels.
Les estimateurs non-paramétriques
classiques ont étéintroduitparRosemblattpour estimer
des densités de probabilité, par Parzen pour estimer le mode dune
densité de probabilité et par Nadaraya Watson pour
estimer une fonction de régression. Le comportement
asymptotique de ces estimateurs a été
étudié par de nombreux auteurs tel que
Tsybakov (2004). Ainsile but de ce travail est de définir les
estimateurs a noyau associé et d'établir les
propriétés relatives
Avant de présenter les résultats de
façon détaillée nous en donnons tout dabordles
grandes lignes.
Dans le deuxième chapitre, nous nous intéressons a
lestimateur a noyau continu
b
symétrique fn d'une
densité de probabilité f inconnue sur R. Plus
précisémment, nous présentons cet estimateur et nous
prouvons les propriétés fondamentales telle que biais,
variance, erreur quadratique moyenne etc Nous
donnons les méthodes de sélectiondu noyau ainsi de la
fenêtre en s'appuyant sur des exemples de données
simulées. ls'avère que le choix du paramètre de
lissage est beaucoup plus important que celui du
noyau
dansl'estimationdesdensitésinconnuesasupportsymétrique.Nousétudionségalement
CHAPITRE 1. INTRODUCTION A L'ESTIMATION 16
NON-PARAMRTRIQUE
le cas multivarié en fin de chapitre.
Dans le troisième chapitre, nous donnons la
définition dun noyau associé. Nous prée
sentons, a partir de cette définition, les estimateurs de Chen (1999
2000) et de Scaillet (2004) et leurs propriétés en rendant les
calculs moins sombre et plus compréhensible. Toujours dans le
cas du noyau associé
asymétrique, nous
généralisons cesces résultatsats au cas
multidimensionnel.
Dans le quatrième chapitre, nous
représentons pareillement la définition du noyau
associé discret en s'appuyant sur les travaux de
Kokonendji & Senga Kiessé (2006).(2006). Nous
définissons l'estimateur a noyau associé discret Nous
étudions lesles propriétés fondamentales de cet estimateur
d'une manière générale ensuite nous les
appliquons dans deux sections; la première se base
sur les données discrètes catégorielles on nous
allons étudier l'estimateur a noyau associé dAitchison
& Aitken et la seconde partie repose sur les données de
comptage on nous allons traiter des exemples des noyaux
associés symétriques et standards
asymétriques. Nous donnons un critére de
choix des fenêtres de lissages. Nous
généralisons cet estimateur dans une version
multidimensionnelle.
Dans le cinquième chapitre, nous
étudions la régression multiple a noyaux
associés mixtes. Nous nous focalisons sur le fameux estimateur de
Nadaraya-Watson.
Dans le sixième chapitre, nous appliquons une
partie de ces estimateurs a noyaux associés sur des
données parsemées de panel en marketing
Nous terminons ce rapport par une conclusion
générale et des idées de recherches futures.
Nous présentons maintenant de manière plus
développéele contenu des six chapitres de ce rapport.

Chapitre 2
Noyau continu symétrique
Dans cette partie, nous présentons l'estimateur a
noyau continu symétrique. Nous
développons cet estimateur dans le cas univarié ensuite nous le
traitons dans le cas
multivarié.Nousétudionségalementlesdifférentespropriétésélémentairesrelatives
acet estimateur telle que biais, variance erreur
quadratique moyenne et erreur
quadratique moyenne
intégrée. Nous détaillons par la suite les
méthodes de choix des fenêtres et des noyaux en se
focalisant sur limportance du choix du paramètre de lissage.
Nous expliquons explicitement 3 méthodes destimation de la
fenêtre. Enfin, nous concluons par un exemple de données
simulées.
2.1 Cas univarié
Considérons un échantillon de variables
aléatoires X1,X2,. . . ,Xn, indépendant et
identiquementdistribué(i.i.d.),dedensitédeprobabilitécontinueinconnue
f sur? = R. L'estimateur a noyau continu
symétrique de f est défini par:
|
bfn(x) = 1
n
|
Xn
i=1
|
~x - Xi ~
1 (2.1)
h K h
|
= bfn,h,K(x),
on K estlafonctionnoyautelleque K(t) =
0et JR K(t)dt = 1et h > 0estleparamètre de lissage ou la
fenêtre. L'expression (21) découle des travaux des pionniers de
estimation non-paramétrique Rosemblatt (1956) puis Parzen
(1962) Dans lexpression de l'estimateur a noyau continu (2.1), la
fonction noyau K est une densité de probabilité sur R
? R+ et est symétrique par rapport a
zéro:
K(-x) = K(x), (2.2)
ce qui implique
l'égalité suivante
ZR tK(t)dt = 0. (2.3)
De plus, elle est de carré intégrable
et nous avons aussi la variance de K finie
ZR t2K(t)dt < +8. (2.5)
Enfin, le noyau K peut être écrit sous
plusieurs formes dont la plus connue est
|
(x - Xi ~
1
Kh(x - Xi) = hK h
|
.
|
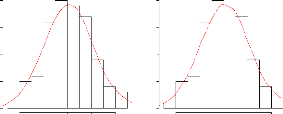
Le tableau 2.1 donne un récapitulatif des fonctions
noyaux continues classiques dont les
graphiques sont présentés dans la
figure 21 Nous rappelons quune loi de Cauchy
n'admet aucun moment fini.
|
TAB. 2.1
|
Eaemples de noyaua continus
symétriques
|
|
Noyau
|
Fonction noyau
|
Domaine de définition
|
|
Cauchy
|
[7r(1 + u2)]-1
|
R
|
|
Biweight
|
(15/16)(1 - u2)2
|
[-1,11
|
|
Triangulaire
|
1 - |u|
|
[-1,11
|
|
Epanechnikov
|
(3/4)(1 - u2)
|
[-1,11
|
|
Gaussien
|
(1/v27r) exp (-u2/2)
|
R
|
Pour plus de détails sur les types des
noyaux, nous pouvons se référer a article
d'Epanechnikov (1969) et le livre de Tsybakov (2004)
L'expression de K détermine la forme du
noyau et h est un paramètre d'échelle qui
détermine le niveau de lissage de l'estimation Dans
lestimation a noyau continu symétrique,
le choix de la fenêtre de lissage est
prépondérant a celui du noyau K. De plus, la
contribution de chaque point de l'échantillon est
additionnée pour obtenir lestimation totale. Ceci est illustré
dans la figure 2.2.
2.1.1 Propriétés
élémentaires
Danscettepartie,nousprésentonslespropriétésfondamentalesdelestimateuretles
critères d'erreurs usuels. Nous calculons dabord le biais et la variance
de lestimateur
b
fn(x). Ensuite, nous exprimons le risque
quadratique exact en un point x fixé, puis le
risque intégré. Enfin, nous approximons ces
résultats. Dans ce qui suit, nous supposons que
les dérivées première et seconde de f existent et
admettent une intégrale finie sur le support de la
densité ?.
FIG. 2.1 - Illustration des noyauc continus
symétriques

b
|
Propriété 1: La fonction x -?
|
de prohahilité
fn(x) est une densité
b
|
|
Démonstration: La somme continue de
|
fn(x) sur le support ? = R est
|
Z Z (x - Xi )
Xn 1
bfn(x)dx = nh K dx
h
R R i=1
Z (x - X1 ~
1
= hK dx,
h
R
en posant t = (x - X1)/h et donc dx = hdt, nous trouvons
Z Z
bfn(x)dx = K(t)dt = 1.
R R
Deplus,lenoyauK
estdéfinipositif.Lasommesurtoutléchantillonresteaussipositive.
Par conséquent, l'hypothèse de
positivité est vérifiée.
2.1.2 Biais ponctuel
Le hiais ponctuel mesure la différence entre la valeur
moyenne de lestimateur bfn et la valeur de la
fonction inconnue f en un point x.
{ } { }
Biais bfn(x) = E
bfn(x)- f(x). (2.6)
Propriété 2: Soit x fixé dans R.
Le hiais de l'estimateur a noyau
présenté dans (21) est
{ } Z
Biais bfn(x) ÿ=1
2h2f00 (x) t2K (t) dt. (2.7)
R
FIG. 2.2 Estimation totale a noyau
gaussien

Le signe » ÿ=» indique
que la quantité à gauche est
équivalente à la quantité à
droite. Démonstration: Comme les variables aléatoires X1,X2,.. .
,Xn sont i.i.d., nous avons successivement
( )}
{ } Xn (x - Xi
1 1
E bfn(x) = E h K
n h
i=1
1
n
Xn
i=1
{ 1 (x - Xi )} E h K h
{ 1 (x - X1 )}
= E hK h
Z ~x - x1 )
1
= hK f (x1) dx1.
h
R
Nous effectuons le changement de variables suivant
-t = (x - x1)/h, d'oñ x1 = ht + x.
b
De là, en utilisant l'hypothèse (2.2),
le biais de fn(x) s'exprime ainsi par
{ } Z
Biais bfn(x) = K (-t) f (x + ht) dt -
f(x)
Z R
= K (t) f (x + ht) dt - f(x).
R
Dans le but d'avoir une forme plus simple qui ne
dépend que du paramètre h, nous approximons la formule
du biais en utilisant la formule de
TaylorrLagrange
f (x + ht) = f(x) + htf' (x) + h2t2
2 f'' (x) + o (h2t2).
Ainsi, nous obtenons
Biais { :fn(x) } = f (x) J K (t)dt + hf(x) JtK(t)dt
R R
+2h2 f" (x) I t2K(t)dt - f
(x) + o(h2).
D'apres les hypotheses (2.3) , (2.4) et (2.5) nous
avons finalement
Biais { in(x)} 12 h2 f00
(x) JRt2K (t) dt.
2.1.3 Variance ponctuelle
Propriete 3 : Soit x fixe dans R. La variance de
l'estimateur bfn est
Var { :fn(x)} =ÿ nhf (x) I K
(t)2 dt. (2.8)
Demonstration: Partant de l'hypothese d'independance
entre les Xi, nous avons
-- Xi V ar { :fii(x) } = V ar n {1 ÷`i x K h
i=1
n
1 V ar{ h 11 K (x - hX1)1
2
E [11 K (x h X1)J )12 n Lt1 1
[Elh 1 K (x h X1)j)11

n
1
1 1
n h2 K2 x h x1) f (x1) dx1
|
n JR
1 h
1 i1K(x x1)
|
2
f (x1) dx1 l .
|
Nous effectuons le changement de variable -t = (x -
x1)/h. Nous trouvons
nh2
1 1
V ar { :fii(x) } = K (-t)2 n f (ht + x)hdt - {IRK
(-t) f (ht + x) hdt} 2
h 1 1
IRK (t)2 f (ht + x) dt - n[Biais {
:fii(x)} + f (x)i2
n
h 1 IRK (t)2 f (ht + x)dt - 1 {O
(h2) + f (x)}2
n
Finalement, sous la condition d'avoir f K(t)2dt <
+8 et pour n grand, nous avons
Var { rn(x)} =ÿ nhf (x) I K
(t)2 dt.
2.1.4 Erreur quadratique moyenne
(MSE)
Propriete 4: L'erreur quadratique
moyenne (en anglais "Mean squared Error") en
un point x fixe s'exprime par
MSE (x) = V ar { :fii(x) } + Biais2 {:fii(x) }
(2.9)
Demonstration: Nous obtenons par succession
MSE (x) = E [{ 1n(x) - f (x)}21
= E ([in(x) E { in(x)} E {
in(x)} f(x)i2)
= E ([ 1n(x) - E { Mx) }i2) + 2E [ 1n(x) -
E { 1n(x)}i
[E { in(x)} f(x)i [E {
in(x)} f(x)i 2
= V ar { rn(x) } + Biais2 {rn(x)}
= MSE(x;n,h,K,f).
D'apres les resultats (2.7) et (2.8), l'approximation du critere
MSE en un point x fixe est
2
AMSE (x) = n1hf (x) I K
(t)2 dt + {1 2 h2 f" (x) I t2K (t)dt } .
(2.10)
2.1.5 Erreur quadratique moyenne
integree (MISE)
Propriete 5: L'erreur quadratique
moyenne integree (en anglais "Mean
Integrated Squared Error ") est la mesure
theorique commune la plus utilisée pour evaluer lerreur entre
la fonction f et bfn. Nous avons etudie dans la partie
precedente le comportement de bfn(x) en un point fixe. Il
est egalement convenable devaluer lerreur globale sur le
support R de cet estimateur.
MISE(n,h,K,f) = I MSE(x)dx (2.11)
R
=
IV ar { :fn(x)} dx + I Biais2
{:fn(x)} dx.
R R
En utilisant l'expression approchee du critere MSE (210) nous
avons successivement
|
AMISE(n,h,K,f) =
|
h1
JRK(t)2dt I f(x)dx
nh
|
2
+h4 t2K(t)dt } f f"(x)2dx
4 R
1 J K(t)2dt +
41h4 t2K(t)dt }2 I
h f" (x)2dx
nR
avec
V (K) = f t2K(t)dt = V ar(K).
2.1.6 Choix du noyau
Le premier choix porte sur la nature de la densité
noyau que nous utilisons. Pour mesurer l'efcacité
de chacun des noyaux continus
symétriques présenté dans lele
tableau 2.1, nous utilisons une mesure commune qui consiste a
calculer le rapport du critere AMISE des deux noyaux mis en
évidence
eff(K1,K2) = AMISE(K1)
AMISE(K2)
Nous supposons que K1 est le noyau
d'Epanechnikov. Ce noyau est considéré comme une
référence par rapport a tous les autres noyaux
continus classiques. Il estest largee ment
apprécié pour ses performances (au sens on sa forme répond
bien a la plupart des questions soulevées par le probleme de
lestimation non paramétrique de densité) et il est
considéré comme optimal au sens des mesures derreur IlII o~re la
valeur défcacité maximale. Nous nous sommes appuis sur les
travaux de Tsybakov (2004).(2004). Ainsi, apres avoir fait les
calculs nécessaires lefcacité dun noyau K para rapport
au noyau d'Epanechnikov se mesure par
1
VfR t2K(t)dt fR
K(t)2dt < 1.
5V5
eff (K) = 3
Le choix de K dépend seulement de la nature de f et
nous admettons qu'en pratique le choix du
noyau d'Epanechnikov est le plus staisfaisant Nous donnons lele
tableau récapitulatif (Tab. 2.2) qui présente la
valeur defcacité des différents noyaux continus
symétriques.
TAB. 2.2 -- Efficacite des noyaux
continus symetriques
Noyau Efficacité
Epanechnikov 1.000
Biweight 0.994
Triangular 0.986
Normal 0.951
Uniform 0.930
Commentaire:
Danslecasdesnoyauxcontinussymétriques,nousremarquonsque
les valeurs d'efcacité des noyaux tels que le
noyau biweight triangulaire ou Epanechnikov
sont tres proches. Par conséquent Le choix du
noyau nest pas tres important.
2.1.7 Choix de fenetres
a. Importance du choix de h
Le parametre de lissage h est un réel
positif dont le choix est prépondérant sur celui du
noyau continu symétrique K. Le choix
d'une valeur de h trop grande conduit a une courbe trop lisse. La
courbe estimée ne traduit pas suffisament les variations de la vraie
distribution (voir figure 2.3).
FIG. 2.3???str?t?? ???? ??e??e?? ??
s?s???ss??? ?rs ?? ??et???t?? ????? ???n?it
Ep/0/ch0-
-2 -1 0 1 2 3
x
Par contre, en choisissant un parametre de lissage
tres petit que celui adopté précédemment,
l'allure de la distribution change. Il sagit dune
distribution surestimé (figure 2.4).
FIG. 2.4 -- ???str?t?? ???? ??e??e?? ??
s?r???ss??? ?rs ?? ??st???t?? ????? ???n?it
Ep/0/ch0-

D..
-2 -1 0 1 2 3
x
ment la distribution de depart (figure 2.5). Les
courbes obtenues illustrent a quel point
FIG. 2.5 -- Illustration
d'une estimation ideale
Ep/0/00-

RI.
-2 -1 0 1 2 3
x
les formes estimees sont differentes en fonction de lordre
de grandeur du paramètre de lissage. La principale
difculte repose sur le choix optimal de la fenetre h. La valeur ideale hid du
parametre h est celle qui minimise l'erreur
quadratique moyenne integree (MISE).
Pour une taille d'echantillon n donnée et un noyau K fixe,
nous avons
?h
? AMISE(h) = 0.
Ce qui est equivalent a
h3V (K)2 I f" (x)2dx 1 2
jali K(t)2dt = 0.
nh
Ainsi, nous obtenons successivement
nh5V (K)2 ff" (x)2dx
= K(t)2dt R
h5 = nV (K)2 fR
f"(x)2dx
fR K(t)2dt
1 I fR
K(t)2dt11/5
hid = v .
V(K)2 fR f" (x)2dx (2.13)
En particulier pour K = KEpanechn., nous avons
~ 15 \1/5
hid(KEpanechn.) =
n R .
R f"(x)2dx
En definitive, a partir de (2.13), nous obtenons
2/5 4/5 11/5
5 1
AMISE(hid) =
L,Rt2K(t)dt1 {
K(t)2dt1 { f" (x)2dx
4 n4/5 R R
51/5
4n4/5 I(K) fR f"(x)2 dx }
avec
~Z ~2/5 ~Z ~4/5
I(K) = t2K(t)dt K(t)2dt .
R R
Conséquences: Quand n est
grand, hid tend vers 0. Le parametre de lissage h idéal
dépendenfaitdeladensitéatravers f".Ainsipourun
hpetit,nousavonsunpetitbiais et une variance plus grande. Le
noyau optimal est obtenu en minimisant R R K(t)2dt, ceci en
admettant les hypotheses (2.4) et (25).
b. Méthodes de choix de fenêtres
Nous considéronss donce avec plus d'intérêtt
la question de selection du parametree de lissage h.
Comme fenêtree optimale, nous choisissons la valeur qui
minimis lee MISE.
Nous étudions trois méthodes dans la
déterminationn du parametre d lissagee
optimalhopt:: le "Plug-in", la validation
croisée par moindres carrés e laa validation croisée par
maximum de vraisemblance.e
b.1. Mahodee Plng-inn
Dans la procéduree de
Plug-in,l'idée& de base est destimerr dan lexpressionn
(2.13) la quantité inconnue: : fR
f"(x)2dx. En effet, ilt y a deux approches
possibles pou leefaire:: soit nous supposons que la
densité f appartient a une famille de distributions
paramétriques et la nous estimons les
parametres et nous retrouvon facilement cette cette quantité,
soit nous l'estimons par lapprochee non-paramétrique et donce
faire appel a un estimateur a noyau (par exemple). Ceci va
compliquer davantag less calculs parceque nous
trouvons une fonction qui dépendd elle même de h.
Donc,, en gros, la méthode Plug-in résidee
a "injecter" une estimation de f en adoptant une méthode
commode et pratique. Dans notre étude,, nous supposons
que f(x) appartient a une famille de distribution normale centrée
et de variance ó2..
Sous cette hypothese::
ZR R f"(x)2dx =88 0r33
ó-1/550.212ó-1/5..
Il reste alors a remplacer le parametre inconnu óa par la
valeur estiméee bó.. Nous choisissons la valeur
empirique comme valeur optimale définiee comme suit
1
bó
=
n -- 1
Xn
i=1i
tu u v
(Xii -- X~2,,
tel que XX = n-11 (X1 + X2 +
.
· .
· .
· + Xn).
|
=
|
(4ð)-1/10
~
|
1
|
8ð-1/2 bó
~ ~3 ~-1/5
|
|
n1/5 5
|
Le résultatt obtenu sera remplacée dans la formule
de hid et nous avons
hopt
(4bó55~1/5
= 3n ~ bó)= =1.06 6n1/55)
Ce que nous avons accompli en travaillant sous la
supposition de la normalité estest une formule explicite applicable pour
la selection de la fenetre h. En réalité, cette méthode
donne des résultats raisonnables pour toute les distributions
symétriques, unimodales et ne possédant pas
des queues trop lourdes Le probleme donc avec cette méthode
est qu'elle est tres sensible aux valeurs aberrantes. Un estimateur
plus robuste dans ce cas est obtenu a partir de l'intervalle
interquartile : R =
X[0.75n] - X[0.25n] o1 Xp
désignelequantiled'ordrepd'une N
(u,ó2).Ladifférenceentrecesdeuxquartilesdonne
50% de l'ensemble des observations. En supposant toujours
que X suit une normale N(u,ó2), nous posons Z = (X -
u)/ó qui suit une N(0,1). Ainsi, nous montrons que
(X[0.75n] -X[0.250 = 1.34ó Par conséquent, un
estimateur puissant de ó serait Q = R/(1.34). Dans ce cas, le parametre
de lissage optimal est donné par
~ hopt = 1.06 1R.34 n-1/5 0.796n-1/5.
Enfin, la fenetre optimale est
hopt = 1.06 min bó,
1.34
R
n-1/5
.

Cette méthode présente des inconvénients
: si la vraie densité f devie substantiellement
delaformed'unedistributionnormale(enétantmultimodalparexemple)nouspouvons
etre trompés considérablement et nous aurons soit un
sur-lissage soit un sous-lissage.
b.2. Methode de validation croisee par ioindres carrés
Pour un noyau fixé K, le principe de la
validation croisée est la minimisation destimateur de risque
intégré (MISE) par rapport a h. En effet, Le MISE
dépend de la fonction inconnue f et ne peut donc pas etre
calculé. Nous allons essayer de remplacer la MISE par une
fonction de h, mesurable par rapport a l'échantillon et dont la valeur
pour chaque h > 0, est un estimateur sans biais de MISE(h). Pour
cela, notons que :
MISE(h) = E f {:fn(x) - f (x)}2 dx
= E f
R Tfii(x)2dx - 2E 1
fn(x) f (x)dx + IR f2 (x)dx
Le dernier terme ne dépend pas de h, pour minimiser
MISE(h) il suffit de minimiser l'expression :
J(h) = E f fn(x)2dx - 2E 1
fn(x) f (x)dx.
Pour cela, nous déterminons un estimateur des deux
termes de J(h). Le premier terme
JR
fn(x)2dx comme estimateur trivial (d'apres
la propriété des esti-
b
admet l'estimateur
mateurs sans biais : E(bâ) = â).
Il reste a trouver un estimateur sans biais du second terme. Pour
cela, nous admettons par construction l'estimateur sans biais G défini
en tout points du support sauf en Xi :
|
Gb =1
n
|
Xn
i=1
|
bfn,-i(Xi),
|
|
avec
|
bfn,-i(x) = 1
n - 1
|
1 X h
i6=j
|
(x - Xi ~
K .
h
|
Montrons que E( bG) = E{fR
bfn(x)f(x)dx}. Comme les Xi sont i.i.d., d'une part
nous avons
~Z ~ Z ~
Xn ~x - Xi
1
E bfn(x)f(x)dx = E K f(x)dx
nh h
R R
i=1
Z ~x - X1 ~
1 hE K f(x)dx
h
R
Z Z ~x - x1 ~
1 f(x) K f(x1)dx1dx.
h h
R R
D'autre part, nous avons
E(
= E {n1
i=1
= E{In,-1(X1)}
|
= E
|
? ?
?
|
~Xj - X1 ~?
1 X ?
K
(n - 1)h h ?
j6=1
|
~ 1 ~X - X1 ~~ = E hK h
Z Z ~x - x1 ~
1 f(x) K f(x1)dx1dx
h h
R R
Z
= E bfn(x)f(x)dx.
R
Donc, Gb est un estimateur sans biais de fR
biais de J(h) est donne par
b
fn(x)f(x)dx. Finalement, l'estimateur sans
CV (h) = fn(x)2 dx - 2 E bfn,-i(Xi).
n
Ri=1
Et la fenetre optimale est telle que
|
hCV = arg min
h>0
|
CV (h).
|
???? ?et??? ?? ??????t?? ?r?sé? ??r
??\u9312‡@???? ?? ?r??s????????
|
et l'estimateur a noyau
|
fn s'écrit:
|
D(f , jn) = fRf(x) log {
j.f.:(xx))
dx
= IR f (x) log f (x)dx - IR f (x)log {
rn(x)} dx
= E [log { f (X)}] - E [log {fn(X) }1 .
b
|
L'idée de la validation croisée par vraisemblance
est de minimiser D(f,
|
fn). Toutefois,
|
cette distance n'est pas métrique et les
critères définis en la minimisant ne sont pas ap-
b
propriés pour obtenir un lissage
adéquat. Donc minimiser D(f, fn) revient
a maximiser
E [log {fn(X)}1. Ainsi, la fenetre optimale est
LCV (h),
hLCV = arg max
h>0
oU
.
LCV (h) = E [log {fn(X)}]
Par construction, nous avons l'estimateur sans biais de LCV
(h):
|
1
Jn = n
|
Xn
i=1
|
n o
log bfn,-i(Xi|h) ,
|
oU
1
bfn,-i(Xi|h) = (
~Xi - Xj ~
X
K
n - 1)h h
i6=j
n
Montrons que E(Jn) = E h oi.
log bfn(X)
Comme les variables aléatoires X1,X2, . . . ,Xn
sont i.i.d., d'une part nous obtenons
" o#
Xn n
1
E(Jn) = E log bfn,-i(Xi|h)
n
i=1
h n oi
= E log bfn,-1(X1|h)
|
?
= E ?log
|
?
?
?
|
?
~X1 - Xj ~? ?
1 X K ?
(n - 1)h h ?
j6=1
|
= E [log { h 1 K X 1 h X2
D'autre part, nous trouvons
" ( ~)#
h n oi Xn ~X - Xi
1
E log bfn(X) = E log K
nh h
i=1
= E [log { h1 K (X - hX )11
= E(Jn).
Enfin, la fenêtre optimale obtenue par la méthode de
validation croisée par vraisemblance se calcule a partir de :
" 1 n
hLCV = arg max log { fn,_i (Xi | h) }1.
h>0 n
i=1
Cependant, cet estimateur est très sensible aux valeurs
aberrantes. Sa diiculté apparait lorsque la méthode
est appliquée a des observations dont la distribution
présente de grandes queues. Les points
situés dans les queues de la distribution a estimer ont des
valeurs faibles, ce qui implique de faibles valeurs des
estimations correspondantes. La présence de l'opérateur log dans
l'expression de l'estimateur pose un problème de convergence
pour les valeurs de densités aux queues. Par
conséquent, il estest diicile dans ce cas de choisir hLCV de
facon optimale, puisque l'on risque soit le
sur-lissage soit une trop grande erreur sur les
queues.
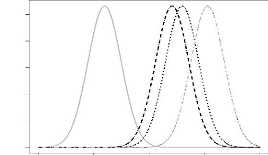
2.1.8 Simulation des donnees
Danscettepartie,nousillustronscertainsestimateursanoyauxcontinussymétriques
a savoir le noyau d'Epanechnikov, le noyau
gaussien le noyau biweight et le noyau
triangulaire. Nous simulons un échantillon de taille n = 100
de la loi normale centrée et réduite. Pour chaque
noyau fixé, la fenêtre optimale est choisie par les
méthodes de validation croisée par moindre carrés et de
Plug-in
?? ???\u9312‡@ ?? ???etr? ??r
P??????
Cette méthode suppose que la densité
suit une loi normale dans lexpression de la fenêtre h optimale. La valeur
du paramètre de lissage est la même pour un
échantillon donné. Nous obtenons pratiquement des
estimations similairespourchaquenoyau continu
utilisé; ceci s'explique par le fait
que les noyaux continus
symétriquespossèdent tous des
efcacités proches l'une de l'autre (Figure 26)
?? ???\u9312‡@ ?? ???etr? ??r ??????t??
?r?sé? ??a ??\u9312‡@???? ?? ?v??i????????
Le choix de la fenêtre optimale hopt se fait en fixant
au préalable le noyau continu Le noyau par
défaut dans le logiciel R est le noyau
gaussien. Le choix des noyaux continus
symétriques n'est pas important car ils ont
quasiment les mêmes propriétés, c'est
pourquoi le choix de la fenêtre optimale se fait sous
lhypothèse gaussienne (et(et aussi pour des
raisons techniques imposées sous R) Pour chaque
noyau continu symétrique fixé,
la figure (2.7) présente la fenêtre optimale hCV =
0.1636. Pour cette valeur de h, les estimations des différentes
densités sont pratiquement similaires.
?? ???ts ?? ???\u9312‡@ ?? ???êtr?s
Nous comparons différentes estimations en faisant varier
la valeur de la fenêtre pour le même noyau continu. Nous
choisissons le noyau optimal dEpanechniiov
Les simulations effectuées dans la figure
(28) mettent en lumière que les performances
pratiques des estimateurs a noyaux continus
symétriques considérés
dépendent fortement du choix de la fenêtre h. Par
conséquent, ce choix est plus crucial que le
choix
Dwelt,
0.0 0.1 0.2 0.9 0.4
Dwelt,
0.0 0.1 02 0.9 0.4
Dwelt,
0.0 0.1 0.2 0.9 0.4
Dwelt,
0.0 0.1 02 0.9 0.4
|
bfn(x) = 1
n
|
Xn
i=1
|
KH (Xi - x) . (2.14)
|
FIG. 2.6 -- ??ss???s ??r ??s ?st???t??rs d
?\u9313‡A??\u9312‡@ ??t???s ?? ? ??ist???t?? ???? ?????
t???? ?? ?? ?r???? ???tré? r(???t?? n = 100 ?t hPI =
0.338

x
Biweight PI
|
Triangulaire PI
|
|

x
du noyau. Les valeurs de h sont celles choisies
par plug-in (hpi = 0.338), validation
croiséeparvraissemblance (hCV =
0.429)etdeuxautresvaleursarbitrairestelque h = 0.05 et h = 1.
2.2 Cas multivarie
Les principales techniques d'estimation
non-paramétriques de densité dans le cas
géneral d'observation de dimension
quelconque restent des variantes destimateurs à
noyau. Nous pouvons choisir destimer toutes les composantes des
observations simultanément ou selon chaque composante
séparément (en faisant le produit des noyaux
univariés).
Nous considérons ainsi les observations (Xij) i.i.d. avec
i = 1, ...,n et j = 1,...,d. Cette échantillon est de densité de
probabilité f continue et inconnue sur = Rd.
b
L'estimateuranoyaucontinusymétrique
fn def admetuneversionmultidimensionnelle et se présente de
maniere générale par
Dwelt,
0.0 0.1 0.2 0.9 0.4
Dwelt,
0.0 0.1 02 0.9 0.4
FIG. 2.7 -- ??ss???s ??r ??s ?st???t??rs d
?\u9313‡A??\u9312‡@ ??t???s ?? ? ??ist???t?? ???? ?????
t???? ?? ?? ?r???? ???tre? re???t?? n = 100 ?t hCy = 0.429
Dwelt,
0.0 0.1 0.2 0.9 0.4
Dwelt,
0.0 0.1 02 0.9 0.4
Epanechn.CV

Biweight CV
|
x
Triangulaire CV
|
|
x
on x =t (x1, ... ,xd) ? Rd, Xi
=t (Xi1, . . . ,Xid) et H = est la matrice de
variance-covariance de la fenetre h, de dimension d × d, donnée
par
H=
?
?? ? .
[H. ... h1d h21 . . . h2d ...
h2j ... hd1 ... h2d
La fonction KH est la fonction noyau définie
sur ?x,h = Rd et reliée avec le noyau
univarié (que nous avons présenté
précédemment) par la relation suivante
|
KH (x) = Idet (H)}
|
--1/2 K (H--1/2x) .(2.15)
|
En effet, comme nous pouvons le remarquer dans
lexpression de H, il peut y avoir des termes de corrélation
entre les différents parametres de lissage. Ces coeffcients
de corrélation vont compliquer davantage les
calculs Nous proposons ainsi une expression plus simple qui fait
appel a un produit des noyaux univariés et qui
néglige leffet des
FIG. 2.8 - ????r??s? ??s ??ss???s
??r ???st???t??r a ?\u9313‡A?? ??t??? ???????????????
???s??t ??r??r ?? ???etr? h
Epanechn.CV h=0.429
Dwelt,
0.0 0.1 0.2 0.9 0.4
Epanechn.PI h=0.338
Dwelt,
0.0 0.1 0.2 0.9 0.4

-2 -1 0 12 -2 -1 0 12
|
x
Epanechn. h=0.05
|
x
Epanechn. h=1
|
-2 -1 0 1 -1 1 2
x

Dwelt,
0.0 0.1 02 0.9 0.4
Dwelt,
0.0 0.1 02 0.9 0.4
corrélations. Dans ce cas, l'estimateur est
|
in(x) = 1
nh1 . . . hd
|
Xn
i=1
|
? ?
?
|
d
j=1
|
(Xij x,) ; hj .1 (2.16) ? ,
|
avec x =t (x1,...,xd) E Rd,hj > 0, Ed
j=1 hj --> 0 et n 1dj=1 hj --> co et Kj est la
fonction noyau univarié présentée
antérieurement En pratique les noyaux-produits
sont recommandés. Les estimateurs a noyau
généralisés sont importants pour lesles
études numériques, mais ils restent cependant utiles
pour des considérations théoriques etet dans certains
cas particuliers.
Note: De manière plus simple, nous prenons le
noyau Kj = K, c'est a dire que nous utilisons ce
même noyau pour toutes les observations. Cependant nous
pouvons faire un mélange de différents
types de noyaux tels que le noyau
d'panechniiov avec le e gaussien, le biweight, etc.

Chapitre 3
Noyau associé continu asymétrique
Dans ce chapitre nous commençons par donner
la définition dun noyau associé continu. A partir de
cette définition, nous présentons lestimateur a noyau
associé continu asymétrique dans le cas
univarié puis multivarié. Nous étudions les
propriétés
élémentairesdecetestimateur.Différentsexemplesseronttraitésenguisedeconclusion.
3.1 Cas univarié
Danscettepremièrepartie,nousprésentonslestimateuranoyauassociécontinuasymétrique
dans le cas univarié. Cet estimateur est approprié pour estimer
des densités a support compact ou bornées d'un côté.
Nous allons traiter quatres noyaux di~érents
gamma, bêta, gaussien inverse (IG) et
gaussien inverse réciproque (RIG) Pour de
réé centes références nous pouvons consulter Chen
(1999 2000) et Scaillet (2004) Nous montrons les propriétés
élémentaires telles que biais, variance et MISE.
Ensuite nous déterminons les fenêtres optimales pour
chaque noyau associé considéré et
lerreur en fonction de ces valeurs.
Soit X1,X2,. . . ,Xn un échantillon de
variables aléatoires iid de densité de probabilité
continue inconnue f a support = [a,b], avec a E R et b E R ( est par exemple
le support [0,1] ou [0, + 8[). De manière
génèrale, l'estimateur a noyau continu est
de la forme suivante:
|
bfn(x) = 1
n
|
Xn
i=1
|
(3.1)
Kx,h(Xi)
|
= bfn,h,K(x),
on x est fixé dans , Kx,h est la fonction noyau
associéU et h est un réel strictement positif appelé
paramètre de lissage.
Dans le cas on Kx,h est associé a un noyau
continu symétrique il vérifie
~x - . ~
1
Kx,h(.) = hK .
h
Dans le cas purement asymétrique,
Kx,h est un noyau variable en fonction de la cible x (point
d'estimation). Il change de forme chaque fois
que x varie dans .
3.1.1 Definition
Definition 1: Soit x ? ? et h > 0. Nous appelons
"noyau associe continu "" Kx,h toute densit( de
probabilit( dune variable aléatoire Kx,h sur le support ?x,h tels
que:
|
?x,h n ? =6 Ø
|
(3.2)
|
|
?x?x,h ? ?
|
(3.3)
|
|
E(Kx,h) ~ x quand h ? 0
|
(3.4)
|
|
V ar(Kx,h) < co
|
(3.5)
|
|
V ar(Kx,h) ? 0 quand h ? 0.
|
(3.6)
|
Commentaires::
a. La relation (3.2) traduit le fait que
l'intersection entre le support des observations et le support du
noyau associé continu
asymétrique doit contenir au moins un
élement. Pour un h fixé, quand x parcourt ?, le
support ?x,h change, l'expression (3.3) suppose que ?
doit etre toujours contenu dans la réunion des ?x,h. La
condition (3.4) permet d'assurer la convergence ponctuelle de
l'estimateur ; elle met en évidence que le noyau
Kx,h est un noyau variable ou adaptif a la cible x. Par
analogie au cas continu symétrique, la
relation (3.5) n'est que la formule annoncée dans (25) du
chapitre précédent. Enfin, la relation (3.6) assure la
convergence de la variance de la variable aléatoire du
noyau associé et va nous servir dans les calculs suivants.
b. Avant que nous passons a l'étude des des
noyaux continus asymétriques, nous
reveFIG. 3.1 - Densit( de loi norinale centrée
Densité de la loi
normale

0.0 0.1 0.2 03 0A
th30040)
-6 -4 -2 0 2 4 6
x
FIG. 3.2 -- Illustration de la densite normale pour h = 1.5 et x
= y varie
0.00 0.05 0.10 0.15 0.20 0.25
K(Y)
|
1
|
Xn
i=1
|
~ ~
exp -1 (Xi x)2 . 2 h2
|
|
nhv2ð
|
-10 -5 0 5 10
y
male N(u,ó2) est une loi continue
définie sur ? = R de densité de probabilité
gN(u,ó2) telle que
~ ~
1 -1 (x - u)2
gN(u,ó2)(x) = v2ðó2 exp .
2 ó2
Si X est une variable aléatoire qui suit la loi
normale alors lespérance et la variance sont respectivement
E(X) = u et V ar(X) = ó2.
La figure 3.1 donne l'allure
génerale d'une densité normale centrée Soit
KN(x,h2) le noyauassociéalavariablealéatoire
KN(x,h2) deloinormale N(x,h2)définisur ?x,h = R.
Nous vérifions ainsi chacune des hypothéses de la
définition 1 En effet, la relation (3.2) se traduit par l'intersection
de ? = R avec ?x,h = R qui n'est que R. En plus, d'apres
(3.3), la réunion sur x de R reste inchangée
puisque le support ne dépend pas de x. A partir de (3.4),
l'espérance est exactement égale a x;
E(KN(x,h2)) = x.
Finalement, la variance est finie et égal
exactement a 0 quand h ? 0;
V ar(KN(x,h2)) = h2 < 8.
A ce niveau, nous donnons l'estimateur a noyau
associé normal défini sur ? = R. Soit X1, ... ,Xn un
échantillon de variables aléatoires iid. de densité de
probabilité f continue et inconnue sur R. L'estimateur a
noyau associé gaussien est
|
bfn(x) = 1
n
|
Xn
i=1
|
KN(x,h2)(Xi)
|
FIG. 3.3 Illustration de la densit normale pour x = 2.1 et h
varié

-1 0 1 2 3 4 5

N(x,h)(y)
0.0 0.5 1.0 1.5 2.0 2.5
h=0.15 h=0.3 h=0.7 h=1.1 h=1.4 h=1.8
Get estimateur est-il une densité de probabilité?
Oui en effet
ZR
Z ( (t - x ~2)
1
bfn(x)dx = -1
hv 2ð exp dx
2 h
R
Z r (x - t )2}
(a) 1 -1
= hv 2ð exp dx
2 h
R
= 1.
(a): La loi gaussienne est
symétrique le fait que nous
intégrons par rapport a x (la cible qui est aussi
la moyenne) ou a t (la variable aléatoire) ne
change rien; nous nous permettons ainsi de permuter entre
la cible x et t et nous trouvons que c'est une densité de
probabilité (voir figure 3.2 et 3.3). Bien que la
vérification dans le cas dun noyau
associécontinusymétriqueparaltsimple,laquestionrestevalablepourchacundesnoyaux
asymétriques.
Nous présentons maintenant les densités continus
asymétriques classiques que
nous allons utiliser dans la suite de cette section (Tab 31)
Soient a et b deux réels strictement positifs
qui vérifient
Z +8
(a) = e_tta_1dt
0
et
Z 1
B(a,b) = ta_1(1 - t)b_1dt.
0
3.1.2 Propriétés élémentaires
Nous donnons dans cette partie les différentes
propriétésfondamentales delestimateur a noyau
associé.
TAB. 3.1 -- ??????? re????t???t?? ??s ??s
?? ?r?????te ??t????s
?s\u9313‡A?éet?i??e
Loi de probabilité Support Densité
Gamma(a,b) R+ (a1)ba ta-1 exp(-t/b)
Beta(a,b) [0, 111 B(a,b)ta-1(1 -
t)b-1
IG(a,b) R+ vvb2ðt3 exp {- 2ba ( a t - 2 + 7)}
RIG(a,b) R+ l2ðtb exp {- 2ba (at - 2 + a1t)}
Loi de probabilité Espérance Variance
Gamma(a,b) ab ab2
Beta(a,b) a/(a + b) ab/ {(a + b)2(a + b + 1)}
IG(a,b) a a3/b
RIG(a,b) 1/a + 1/b 1/ab + 2/b2
Propriétés 1:: ??t X1,X2,. . . ,Xn ??
(????t???? ?? ??r?????s ??e?t?r?s ?????? ?? ????
b
s?t ?? ?r??????te ??t???? ??????? f d
s???rt ?? ??t fn ?? ?st???t??r ?? f a
?\u9313‡A??
b
fn(x) ???st ??s ?e?
?ss??e ??t??? ?s\u9313‡A?etr?q??
?é??? ?r ?? ??rs? ?? ???t?? x 7-?
??ss??r????t ??? ???s?tt ?? ?r??????té ?r ?? ??
?s??t
1,2
c = I bfn(x)dx = c(h,K) = 0,
b
??s ??s??er?s ?esr???s ???st???t??r fn t?? q??
|
in(x) = nc
|
Xn
i=1
|
Kx,h(Xi). (3.7)
|
|
Dans la suite, nous supposons que
|
fn(x) est une densité de probabilité.
Nous illustrons
|
cette hypothese dans la partie exemple
b
densite de probabilite continue inconnue f de support ?. Soit
fn l'estimateur de f a noyau associe continu
asymetrique Kx,h de variable aleatoire Kx,h
sur le support ?x,h. Alors, ?x ? ? et h > 0, nous avons
E {fri(x)} = E{f(Kx,h)} . (3.8)
Démonstration: Soit x ? ?. Nous avons successivement
E {/n(x) } = E nEKx,h(Xi)}
{ 1 n
i=1
= E {Kx,h(X1)}
(a)
=
= E{f(Kx,h)} .
(a); les Xi sont dans ? et le noyau
associé est défini sur ?x,h. D'on l'intégrale
se fait sur l'intersection des deux supports
Dans le but d'assurer la convergence ponctuelle de
lestimateur nous avons adapté le lemme présenté par Hille
(1948) et dont une démonstration a été donnée par
Feller (1966) dans le lemme1,page 219.Noussignalons
que celemme étaiténoncé
dansletravailrécentdeChaubey
etal.(2007)1.Ainsi,nousleformulonsdanslapropriétésuivante
Propriété 3: Soient f une fonction continue et
bornée sur ? et x est fixée sur ce
b
support. Soit fn l'estimateur a noyau
associé continu Kx,h sur ?x,h. Nous supposons que
?x ? ?,?x,h ? ?. Alors nous avons
|
E {In(x)} =
|
ftn?x,h
|
f(t)Kx,h(t)dt ? f(x) quand n ? 8.
|
La convergence est uniforme en toute subdivision de ?
dans laquelle V ar(Kx,h) ? 0 quand h ? 0 et la
fonction f est uniformément continue.
Démonstration: Nous partons de l'expression de lestimateur
dans (3.1) et nous calculons son espérance
E {fn(x)} = Kx,h(z)f (z)dz.
Itx,hn?
Comme?x,h ? ?, nous pouvons écrire f(x) = f(x) R
?x,h Kx,h(z)dz. Ainsi, il existe ä > 0
tel que
~
E{.7.n(x)}- f(x) =h{f(z) - f (x)}
Kx,h(z)dZ
Nx,
f |f(z) - f (x)| Kx,h(z)dz + I |f(z) - f (x)|
Kx,h(z)dz.
?? \u9670·?s et??s r???tes ???s ?? res??t?t ??r ? Pr??ss??r
???????? ????u a ??????er?it ??????????? ?t ?? ??s?t? ?? ???r?t?r? ??
??t?e??t?i??e ?????i?u?e ?? ???
Pour calculer la première quantité, nous
utilisons directement la définition de la continuité:
?e > 0, ? ä > 0, ?z : |z - x| < ä |f(z) -
f(x)| < €. D'on nous obtenons,
|f(z) - f (x)|Kx,h(z)dz = E Kx h(z)dz
lz-x|<ä flz-x|<ä
= €.
Pour calculer la deuxième quantité, nous
utilisons linégalité de Tchebychev-Markov
Comme f est bornée ? M > 0 tel que f = M. Ainsi, nous
avons
fl (z) - f (x)|Kx,h(z)dz = 2M I Kx,h(z)dz
z-xl>5|
1z-x|>ä
2M
ä2
ä2 Kx h(z)dz
flz-x|>ä
2M
L (z - x)2 Kx,h(z)dz
.,h
2M
ä2
E {(Kx,h x)2}
(a) = 2M 2M
ä2 V ar (Kx,h) + ä2 {E (Kx,h) -
x}2
(a): nous appliquons directement la formule
E(X2) = V ar(X) + {E(X)}2. Or, d'après les deux
hypothèses (3.4) et (3.6) du noyau associé,
la dernière inégalité tend vers 0. Nous
concluons enfin que
E { in(x)} -f(x) ? 0 quand n ? +8.
Remarque: ?? ?r?r?ete
q?? ??s ???s ?res??t( ?st ??????? ???s ??le ??s ??e
?\u9313‡A??\u9312‡@??t???s
s\u9313‡A?etr?q??s ?t
?s\u9313‡A?etr?q??s?
Proprietes 4: \u9670·?s ?res??t?s ??
?e?????????t ????t( ??
??\u9313‡A?r????r???? a ?r?d??
?t ?? ???t ?\u9313‡A?? ?? ?? ??r????? ??e?t?r? E(Kx,h) = mx,h
t?? q??
f(Kx,h)ÿ=f(mx,h) + (Kx,h -
mx,h)f0(x) + 12(Kx,h -
mx,h)2f"(x). (3.9)
?? ????????t ???s?er???? ?? ??tt?
q???t?té? ??s ?t???n
E {f(Kx,h)} ÿ=f {E(Kx,h)} +
2V ar(Kx,h)f00(x). (3.10)
1
3.1.3 Biais ponctuel
Propriétés 5:: Soit x fix( dans ?. Nous
avons
Biais {1n(x) } = E {1n(x)} - f(x)
=ÿ [f {E(Kx,h)} - f(x)] + 21 V
ar(Kx,h)f" (x). (3.11)
Demontration : En effet, d'apres le resultat de (38) et les deux
expressions dapproximation de Taylor-Lagrange
(3.9) et (3.10) le biais sobtient facilement en retranchant
f(x).
Remarque: Nous remarquons que le
biais ne d(pend pas de n et tend vers 0 quand h est tres
petit.
|
3.1.4 Variance ponctuelle
Pour un x fixe, nous generalisons l'expression de la
variance de que ce resultat sera utilise dans la partie exemple
|
b
fn.
|
Nous precisons
|
Propriétés 6:: Soit x fix( dans ?. Nous
avons
n o Z h n o i2
V ar bfn(x) =ÿ 1 K2
x,h(t)f(t)dt - 1 Biais bfn(x) . (3.12)
+ f (x)
n n
?x,hn?
Demonstration: Comme les Xi sont i.i.d., nous obtenons
successivement
V ar {:fn(x) } = V ar { 1 E Kx,h (Xi)}
n
i=1
|
1
n
1
n
|
[V ar {Kx,h(X1)}]
[E {Kx,h(X1)}2] -1 n [E{Kx,h(X1)}]2
|
(Z ) (Z )2
1 K2 - 1
x,h(t)f(t)dt Kx,h(t)f(t)dt .
n n
?x,hn? ?x,hn?
Par analogie avec le noyau continu
symetrique nous avons
|
{Z ?x,hn?
|
2
Kx,h(t)f(t)dt }=ÿ [Biais fn(x)} + f
(x) 2
|
et sous la condition f?x,hK x2 h(t) f (t)dt est finie,
la variance de fn est
J
1 2
V ar {in(x)} =ÿ1
h(t) f (t)dt } - n [Biais {fn(x)} + f (x)1 .
n Rxhn?x,
|
3.1.5 MISE L'erreur globale de
|
b
fn s'obtient en sommant le carré de
l'expression (311) avec le
|
resultat obtenu dans (3.12).
Propriétés 7: En sommant sur l'intersection des
deua supports, e MIISE est
|
Z
MISE =
?
|
{ }
E bfn(x) _ f(x) dx
x,hn?
|
Z { } Z }
Biais2 {
= V ar bfn(x) dx +
bfn(x) dx.
?x,hn? ?x,hn?
3.1.6 Exemples
Nous supposons dans toute la suite que f admet une
dérivée seconde continue sur
}2 }2
le support et que les termes suivants sont finis J {
{
f'(x) dx, J xf''(x) dx et
? ?
f{ }2
x3f''(x) dx.
?
a. Cas d'un noyau associé gamma
Chen (2000) était le premier a introduire l'estimateur a
noyau asymétrique. Il
préb
|
sentait au début un premier estimateur
|
fn a noyau gamma de
paramètres a = x/h + 1
|
et b = h, il calculait ensuite les propriétés
ponctuelles et globalesliées a cet estimateur Puis, a cause
des problèmes du biais au bord quavait cet estimateur Chen
e~ectuait
unelégèremodificationauniveaudesparamètresdunoyaugammapourréduirelerreur
|
et il représentait un deuxième estimateur
que nous notons
|
bbfn(x).
|
Nous rappelons qu'une loi gamma est une loi
continue asymétrique définie sur = R+ de
densité de probablité gG(a,b) telle que:
ta-1e-t/b
gG(a,b)(t) = (a)ba ,
Z
(a) =
avec
e-tta-1dt.
R+
Si X une variable aléatoire qui suit la loi
gamma, alors
E(X) = ab et V ar(X) = ab2.
D'après la figure 3.4, nous
remarquons que selon les valeurs que prennent
a et b, l'allure de la courbe change. Dans le cas particulier on a =
1 nous retrouvons la loi exponentionnelle.
Soit KG(x/h+1;h) le noyau associé a la variable
aléatoire 1G(x/h+1;h) de loi gamma et de support x,h = R+. Il
est donné par
FIG. 3.4 Allure générale d'une densit
gamma
Densité de la loi gamma
0 1 2 3 4 5
y

Density Gamma
0.0 0.2 0.4 0.6 0.8 1.0
Gamma
a=1 b=1
a=2 b=1
a=3 b=1
a=4 b=2
a=5 b=2
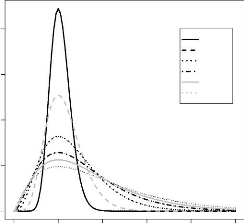
Les deux figures 3.5 et 3.6 donnent l'allure du
noyau associé gamma qui dépend
des paramêtres x et h. Nous donnons en premier lieu la
représentation du noyau gamma pour un h
fixé, nous remarquons qu'en changeant x
la courbe change légérement de forme et se
déplace principalement sur l'axe des abscisses. Cependant, si nous
varions h comme indiqué dans le
graphique 3.6, l'allure de cette densité
change complétement.
Nous révisons d'abord les différentes
hypotheses du noyau associé KG(x/h+1;h).
R+ = Ø.
i.R+ n =6
R+
ii.uxR+ = R+.
+ 1)h = x ' x h --* 0.
iii.E(JCG(x/h+1,h)) quand
= (x/h + h
xh +
iv.V ar(JCG(x/h+1,h)) = (x/h + 1)h2 = h2
< 00.
v.h --* 0 V ar(JCG(x/h+1,h)) = 0.
Soit X1,X2,. . . ,Xn un échantillon de
variables aléatoires iid. a support = R, de
b
densité de probabilité continue inconnue f. Nous
considérons l'estimateur fn a noyau associé
gamma tel que
Xn
i=1
Xn
i=1
bfn(x) = 1
n
1
n
KG(x/h+1;h)(Xi)
Xx/h
1 i e_Xi/h
(x/h + 1) hx/h+1 ,
FIG. 3.5 Allure du noyau assoei gamma
pour h = 0.2 et x varié
h=0.2
0 1 2 3 4 5
y

Gamma(x,h)(y)
0.0 0.5 1.0 1.5 2.0
x=0 x=0.5
x=1
x=2 x=2.8 x=3.5
on h > 0 est le paramêtre de lissage et K est
le noyau associé a une variable aléatoire de loi
gamma de paramêtres x/h + 1 et h. D'aprês (3.11), nous
avons
{ } = hf'(x) + 1
Biais bfn(x)
2hxf''(x) + o(h). (3.13)
Dans le calcul du biais, nous nous arrêtons a lordre 1
pour avoir une homogénéité des puissances avec
la variance dans le calcul de lerreur quadratique
moyenne intégrée MISE (Le biais sera
élevé au carré) D'aprês cette expression, nous
remarquons que e biais tend vers 0 quand h
tend aussi vers 0. Le fait que f' et f''
figurent dans la même équation, n'est pas
três favorable dans le calcul du biais puisque
ça augmente lerreur La complicité de la
dérivée premiere avec la dérivée seconde est dfe au
fait que x n'est pas la cible mais elle est plutôt le mode.
Nous calculons la variance de cet estimateur Daprês (312)
nous avons
{ o h
V ar bfn(x) = 1 E
~KG(x/h+1;h)(X1)~2i - 1 ~E ~KG(x/h+1;h)(X1)~]2 . n n
Nous calculons chacun des deux termes En effet nous avons
.
( )
X2x/h
1 e_2X1/h
E {KG(x/h+1;h)(X1)}2 = E
h2(x/h+1)2x/h + 1
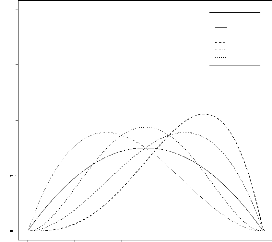
FIG. 3.6 - Allure du noyau associe gamma
pour x = y = 2 et h varie
0.0 0.2 0.4 0.6 0.8
Gamma(x,h)(y)
x=2
h=0.1 h=0.3 h=0.7
h=1.1 h=1.4 h=1.8
0 2 4 6 8 10
y
Soit KG(2x/h+1;h) un noyau associe gamma de
par/ahme-et2rXe1s /2h
01. 2x/h + 1 et h;
{KG(2+1;h)(X1)} =
2 1 2x h2x/h+1(2x/h +
1).
Ce qui implique
X1 2x/he-2X1/h = h2x/h+1(2x/h
+ 1)KG(2x/h+1;h)(X1). Ainsi, nous trouvons finalement
(
h2x/h+1 (2x/h + 1)
E ~KG(x/h+1;h)(X1)~2 = E
h2(x/h+1) 2(x/h + 1) KG(2x/h+1;h)(X1)
h-1
(2x/h + 1) il K
lG(2x/h+1;h)PC1)}
=
2 (x/h + 1) .
Nous examinons les differentes conditions du noyau
associe KG(2x/h+1;h). i. R+ n R+ = R+ =6 Ø.
ii.?xR+ = R+.
iii. E(KG(20/+1;h)) = (2x/h + 1)h = 2x + h.
iv. V ar(KG(201,+1;h)) = (2x/h + 1)h2 = 2xh +
h2 < co.
v.h ? 0 V ar(KG(2x/h+1;h)) = 0.
Ah(x) ~
-1/2 si x/h ? 8
1h si x/h ? k,
?
??? ?
????
1 x 2vhð
(2k+1) 21+2k2(k+1)
Nous avons ainsi
E~KG(2x/h+1;h)(X1)~ = f(x) + h 2 f0(x) + o(h).
Soit l'expression de Ah(x) telle que
Ah(x) =h-1 (2x/h + 1)
2(x/h + 1).
Nous considerons la fonction R(z) monotone, croissante et
converge vers 1 quand z tend vers l'infini (i.e: ?z >
0, R(z) < 1). Elle est donnée par
v
2ð
R(z) = e-z zz-H. (3.14)
(z + 1)
En prenant z = 2x/h et z = x/h, nous obtenons
v2ð
e-2x/h(20.)2x/h+1/2
R(2x / h) =
(2x/h + 1)
R2(x/h) =
2ð e-2x/h(2x/h)2(x/h+1/2).
2 (x / h + 1)
Ainsi, Ah(x) peut etre exprimee en fonction de R(x/h) et
R(2x/h).
Ah(x) = 1 v2ð R2 (x / h)
e-2x/h 2x \ 2x/h+1/2 x -2(x/h+1/2)
2ð R(2x/h) e-2x/h h h
|
h1/2
|
R2(x/h) x R(2x / h)
|
-1/222x/h+1.
|
|
v2ð
|
Comme R(z) < 1 alors R2(z) reste encore inferieur a
1. Par consequent, le rapport
R(2x/h) < 1 et nous trouvons
R2(x/h)
h1/2 R2 (x/h)
-1/222x/h+1
Ah(x) =
v2ð R(2x/h) x
hv
= 2v.
ðx
Pour un h suffisamment petit,
on k est une constante positive.
Nous calculons a ce niveau le deuxieme terme de la variance
2
\ 112
[E {KG(x/h+1;h)(X1) I .1 = [E {Lfn,h,K(x)dx }i
=(a) 1.
(a): D'apres la propriété (3.7).
En conclusion, la variance est donnée par
-1/2f(x) + O(n-1) si x/h ? 8
1 si x/h ? k.
hnf(x)
V ar {:fii(x)} ~ ??? ? ?
????
1 x 2nvhð
(2k+1)
21+2k2(k+1)
L'impact de la variance au bord est
négligeable dans la calcul de son
intégrale, nous ne tenons compte que du terme
qui se trouve a lintérieur de notre support ceci se
démontre par le calcul suivant:
Soit ä = h1-E, on 0 < E < 1.
f ar {:fii(x)} dx = 1ä V ar
{:fii(x)} dx + f: V ar {:fii(x)} dx
T8 1
x-1/2 f (x)dx + O(n-1 h-€)
2nvher
1 r 2nvher 0 x-1/2 f (x)dx +
o(n-1h-6).
La valeur de la variance dans la petite boule de centre 0 et
de rayon h1-€ dispose d'une valeur dérisoire
ce qui fait que la quantité
qui pése le plus est celle qui se trouve au milieu de
]0, + 8[.
Nous mesurons ainsi l'erreur quadratique
moyenne intégrée MISE
8 2 rMI SE(n,h,K,f) = 10 Biais {fn(x) } + V
ar {:fn(x)}
Z 82
= h2 r f0(x) +
12xf"(x) dx
0
+ 2nN 1 her Jo8
x-1/2f(x)dx + o( 1 ).
nvh
En minimisant le MISE par rapport a h, nous avons
|
2h
|
fo
|
2
(x) + 12xf (x) } dx
|
1 1
2n 2h2Or /0
|
8
x
|
-1/2f(x)dx = 0.
|
Enessayantdedéterminerlafenetreoptimalenousregrouponslestermesen
hdememe coté;
8
0°
2h I {f' (x) + 1 2 x f" (x) }2
dx =
2n 2h2ver
1 x-1/2 f (x)dx.
C'est-à-dire
|
h5/2 = 1/20r f rx-1/2f()dx 4f 0 {1(x) +
(x)}2 dx
n
|
-1.
|
Enfin, la fen:tre optimale est
|
hopt =
|
(1/2vð)2/5 r
if08 x-1/2f(x)dx}2/5 n [f r { f' (x) +
1xf"(x)}2 dx] 2/5
|
-2/5.
|
La fenetre optimale dans le cas
asymétrique est dordre
O(n-2/5) inférieur que dans le cas
symétrique O(n-1/5). En
remplacant cette valeur optimale dans l'expression du MISE, nous
avons successivement
2
MISEopt (hopt)
ho2 pt 8 1
{f (x) + 2x f (x) } dx
|
+
|
1 1
|
8
L-1/2 I
x-1/2 f (x)dx
'opt
|
|
|
2vð n
|
|
=ÿ
|
n-4/5
44/5 2v7r 0
{ 1 /8 -1/2 2 1/5
x f(x)dx }4/5 f (x) + 2x (x) } dx .
[18 1 "
0
|
b
Dans le but de réduire le biais et par la suite
l'erreur entre fn et f, nous présontons le deuxième
estimateur qu'a introduit Chen (2000) ; la modification sest faite
au niveau de la cible de sorte qu'elle devient la moyenne
de la variable aléatoire du noyau associé. Pour cela,
soit
|
fn(x) = 1
n
|
Xn
i=1
|
KG(ñh(x);h)(Xi), (3.15)
|
ofi
|
ñh(x) ~
|
?
?? ?
???
|
x si x = 2h
4h2
x2+1
si x ? [0,2h[.
|
De la meme manière, nous calculons toute les
propriétés de cet estimateur Le biais est tel que:
|
Biais {in(x)} ~
|
?
?? ?
???
|
2 x f" (x)h + o(h) si x = 2h
îh(x)hf'(x) + o(h) si x ? [0,2h[.
|
La variable î dépend de h et change de
valeur en fonction de x, elle est égale à:
îh(x) = (1 - x) {ñh(x) - x/h} / {1 + hñh(x) -
x}.
Clairement, le biais est plus petit dans ce cas ;
quand x tend vers l'infini, nous obtenons une expression
qui ne dépend que de la dérivée seconde
f00, ce qui est plus faible par rapport au biais de
fn.
La variance de f est équivalente a celle de
fn pour x/h tend vers l'infini. Nous distinguons une
légère différence dans le cas on x/h s'approche
de la constante k. En effet, la variance est égale a:
~ ~
V ar bbfn(x) ~
x-1/2f(x) + O(n-1) si x/h ?
8
a(k) n1 h f (x) si x/h ? k,
?
???
???
1
n
v 1 2 hð
avec a(k) un coefficient qui dépend seulement
de k.
La somme du biais au carré et de la variance nous
amène a déterminer le MISE de cet estimateur;
1 1 1 1 2
MISE( r 2 f (x)dx
Tfii)= h2 {x f (x)} dx + v x
hð n 0
4 0
(1/2vð)2/5 U08 x-1/2f(x)dx}2/5 Lb 8 {x
f" (x)} 2 dx] 2/5 n
-2/5.
Ainsi, la fenêtre optimale est
hopt =
En substituant cette valeur dans lexpression du MISE lerreur
quadratique moyenne
intégrée optimale est::
-1/2 f (x)dx ] 4/5
1 1
MIS Eot(hot) =44/5 [ 2vð fo8 x [fo8
fixf"(x)12 dx ] 1/5 n-4/5.
|
Nouspouvonsêtretenterquelesdeuxestimateurs f
et
|
bb
f atteignentlavitessedeconver-
|
gence optimale. Nous montrons que pour
toute densité f continue:
Z 8 ~f (x) + 2 x f,, (x) }2
dx= fo8 {x f,,(x) }2 dx.
Ceci implique
systématiquement
MISEopt( bf) =
MISEopt(bbf).
Enfin, du point de vue purement théorique, il
est clair que le deuxième estimateur bbf donne de
meilleure performance en utilisant une fenêtre plus faible par rapport au
pre-
b. Cas d'un noyau associe beta
Tout comme les noyaux gamma, Chen (1999)
applique le même principe pour les noyaux
bêta. Il introduit pour cela un premier estimateur on ilit
remarque que les paramètres choisis ne sont pas
les plus adéquats donc, ilit essaye de les
harmoniser etet les es
arranger pour aboutir a de meilleures estimations
et par conséquent de meilleures perr formances. L'idée
est strictement la meme nous commencons ainsi par rappeler la loi
beta. La densité de probabilité d'une loi beta est définie
continue sur [0,1] telle que:
|
gBe(a,b)(t) = on a > 0, b > 0 et vérifiant
|
B(a,b)ta-1(1 - t)b-11[0,1](t), 1
|
B(a,b) = I ta-1 (1 - t)b-1dt.
Si X est une variable aléatoire qui suit la loi
beta alors
a ab
E(X) = et V ar(X) =
a + b (a + b)2(a + b + 1).
La figure 3.7 donne l'allure de la fonction beta d'une
manière générale.
FIG. 3.7 -- Allure generale de la densit(
bêta
0.0 0.2 0.4 0.6 0.8 1.0
y
Bet3(3,b)
4
3
2
Bêta
a=2 b=2
a=3 b=2
a=4 b=2
a=2 b=3
a=3 b=3
LenoyauKBe(x/h+1;(1-x)/h+1))estlenoyauassociéaunevariablealéatoire
KBe(x/h+1;(1-x)/h+1)) de loi beta et de support ?x,h = [0,1] tel
que:
.
1
KBe(x/h+1;(1-x)/h+1)(t) = B(x /h + 1,(1 - x)/h +
1)tx/h(1 - t)(1-x)/h
FIG. 3.8 -- Allure du noyau associe bêta pour
h = 0.2 et x varie
h=0.2

Beta(x,h)(y)
0 1 2 3 4 5 6
x=0 x=0.1 x=0.2 x=0.3 x=0.4 x=0.5
0.0 0.2 0.4 0.6 0.8 1.0
y
Lesfigures3.8et3.9donnentlavariationdunoyaubetachaquefoisquenouschangeons
les paramètres x et h.
Nous nous assurons que ce noyau est bel et
bien un noyau associé i.[0,1] n [0,1] = [0,1] =6 Ø.
ii.?x[0,1] = [0,1].
(x+h)
iii. E(KBe(x/h+1;(1--x)/h+1)) = (1+2h) x quand h
?0.
x(1--x)h+h2+h3
iv.

V ar(KBe(x/h+1;(1--x)/h+1)) = (1+2h)2(1+3h)< 8.
v.h ? 0 V ar(KBe(x/h+1;(1--x)/h+1)) = 0.
Soit X1,X2,. . . ,Xn un échantillon de
variables aléatoires i.i.d sur ? = [0,1], de densité
de probabilité continue
asymétrique inconnue f. Nous considérons
l'estimateur
fn de f
a noyau beta tel que
|
fn(x) = 1
n
|
Xn
i=1
|
KBe(x/h+1;(1--x)/h+1)(Xi)
|
1
n
Xn
i=1
B(x/h + 1,(1 - x)/h + 1)
,
1 Xi x/h(1 - Xi)(1--x)/h
avec x ? [0,1] et h > 0 est le paramètre de
lissage.
FIG. 3.9 -- Allure du noyau associe bêta pour x
= y = 2 et h varie
x=0.2

Beta(x,h)(y)
0.0 0.5 1.0 1.5 2.0 2.5 3.0
h=0.1 h=0.3 h=0.7
h=1.1 h=1.4 h=1.8
0.0 0.2 0.4 0.6 0.8 1.0
y
En se bénéficiant des calculs antérieurs
nous avons
1
Biais {:fii(x) } = h(1 - 2x) f (x) + 2x(1 -
x)hf"(x) + o(h),
et
V ar {:fii(x)} = n1 [E
1KBe(x/h+1;(1-x)/h+1)(X1)}21 + O(n-1),
on
1 i (1 - Xi)2(1-x)/h.
~KBe(x/h+1;(1-x)/h+1)(X1)~2 = B2(x/h + 1;
(1 - x)/h + 1)X2x/h
Soit KBe(x/h+1;(1-x)/h+1) le noyau
associé de loi beta défini par
KBe(2x/h+1;2(1-x)/h+1)(Xi) =
B(2x/h + 1; 2(1 - x)/h + 1)
1
i
X2x/h(1 - Xi)2(1-x)/h.
Ce qui fait que
Xi 2x/h(1 -Xi)2(1-x)/h = B(2x/h + 1; 2(1 - x)/h +
1)KBe(2x/h+1;2(1-x)/h+1)(Xi). Ainsi:
Tout compte fait, nous avons
E {KBe(x/h+1;(1-x)/h+1)(X1) }2
B(2x/h + 1; 2(1 - x)/h + 1)
=
B2(x/h + 1;(1 - x)/h + 1)
E {KBe(2x/h+1;2(1-x)/h+1)(Xi)}.
Nous appellons Ah(x) = B(2x/h+1;2(1-x)/h+1)
B2(x/h+1;(1-x)/h+1) et nous rappellons que B(a,b) =
(a)(b)
(a+b) .
Nous vérifions les conditions du noyau
associé KBe(2x/h+1;2(1-x)/h+1)(Xi).
i.[0,1] n [0,1] = [0,1] =6 z. ii.ux[0,1] = [0,1].
x+h/2
iii.E(KBe(2x/h+1;2(1-x)/h+1)) = 1+h ~ x quand h ?
0.
< 8.
iv.V ar(KBe(2x/h+1;2(1-x)/h+1)) = 4x(1-x)h+2h+h2 v.h ? 0
V ar(KBe(2x/h+1;2(1-x)/h+1))
(2+2h)2(2+3h)
= 0.
En exploitant la fonction (3.14), nous avons
/
27r
R(2x/h) = ô(2x/h + 1)e
(2x
-2x/h
~2x/h+1/2
h
|
/
27r
R(2(1 - x)/h) = ô (2 ( 1 - x)/h + 1)e
|
(2(1 - x) )2(1-x)/h+1/2
-2(1-x)/h
h
|
|
/
27r
R(2/h + 1) =ô (2/ h+ 2)e
|
/2 )2/h+1+1/2
-2/h+1 h + 1
|
De même, nous avons
|
27r
R2(x/h) = ô2(x/h + 1)e
|
-2x/h ~x ~2x/h+1/2
h
|
|
27r
R2((1 - x)/h) = ô2(2(1 - x)/h +
1)e
|
(1 - x
-2(1-x)/h
h
|
~2(1-x)/h+1/2
|
|
27r
R2(1/h + 1) = ô2(1/h +
2)e
|
/1 + h )2(1/h+1)
-2(1/h+1)
h
|
Ainsi, nous trouvons
1 7r {x(1 - x)}-1/2 h-1/2 R(2/h +
1)R2(x/h)R2((1 - x)/h) Ah(x) = 2/
R(2x/h)R(2(1 - x)/h)R2(1/h + 1).
Enmajorantcetteexpressionpar
1,Ah(x)prenddeuxvaleursdifférentesselonlaconvergence du
rapport x/h et (1 - x)/h.
|
Ah(x) ~
|
?
????
????
|
2v 1 ð {x(1 - x)}-1/2 h-1/2 si x/h et (1 -
x)/h ? 8
22k+12(k+1)h-1
(2k+1) si x/h ou (1 - x)/h ? k.
|
Enfin, la variance est égale a
{ }
V ar bfn(x) ~
?
????
????
1 nh1/2 f(x) + O(n-1) si x/h et (1 - x)/h ?
8
2v ð {x(x - 1)}-1/2 1
ô(2k+1)
22k+1ô2(k+1)
nhf(x) + O(n-1)
1 si x/h ou (1 - x)/h ? k.
Nous évaluons l'erreur quadratique
moyenne intégrée de cet estimateur
1 2
MISE {:fii(x) }=ÿh2 {10 (1
- 2x) f' (x) + 2 x(1 - x)f" (x) } dx
1r+ 27Whð {x(x - 1)}-1/2 f (x)dx.
Nous minimisons le MISE par rapport h et nous
déterminons la fenêtre optimale hopt.
2/5

[
1 [2,/ðf o1 {x(x - 1)}-1/2 f (x)dx]
-2/5.
hopt = 42/5
f
o1(1-2x)f
'
(x)+
1
2
-
x(1-x)f
''
(x)
} dx]
De maniere similaire au noyau associé
gamma et en considérantlles mêmesrraisonspour les
quelles nous avons introduit le second estimateur a noyau
associé gamma quiccorrge le biais au
bord, nous présentons a ce, niveau le second estimateur a
noyau assocéébtta défini sur [0,1] :
|
fn(x) = 1
n
|
Xn
i=1
|
KBe(x;h)(Xi), (3.16)
|
|
avec
|
KBe(x;h)(Xi)
|
?
?????? ?
???????
|
KBe(x/h;(1-x)/h)(Xi) si x ? [2h,1 - 2h]
KBe(ñh(x);(1-x)/h)(Xi) si x ? [0,2h[
KBe(x/h;ñh(1-x))(Xi) si x ?]1 - 2h,1]
|
on ñh(x) = 2h2 + 2.5 - /4h4 +
6h2 - x2 - x/h. ?h fixé, ñh(x) est
croissante sur [0,2h]. Nous faisons tendre h vers 0 et vers 1, les
quantités au bord deviennent faibles Ainsi
nousrécupéronsjustel'expressionquisetrouvealintérieurdelintervalle.Nousrévisons
les hypotheses mis sur le noyau associé
i.[0,1] n [0,1] = [0,1] =6 Ø.
ii.?x[0,1] = [0,1].
iii.E(KBe(x/h;(1-x)/h)) = x.
iv. V ar(KBe(x/h;1-x/h)) = x(1-x)h 1+h <
8.
v. h ? 0 V ar(KBe(x/h;1-x/h)) = 0. Le biais est
égal à
|
Biais {fn(x)}
|
?
?????? ?
???????
|
2 hx(1 - x) f" (x) + o(h) si x ? [2h,1 - 2h]
æh(x)hf0(x) + o(h) si x ? [0,2h]
-æh(x)hf0(x) + o(h) si x ? [1 - 2h,1]
|
2 2/5 n
avec æh(x) = (1 - x) {ñh(x) - x/h} {1 +
hñh(x) - x}.
La variance de ce deuxieme estimateur est similaire au
premier quand x/h et (1 - x)/h
tendent vers l'infini.
V ar {1n(x)} =
1
{x(x - 1)}-1/2 f(x) + O(n-1).
2nvhð
Enfin, la fenetre optimale est
|
Comme
|
hopt =
|
[2 \1/ð f {x(x - 1)}-1/2 f
(x)dx] 2/5 ol
~nR 1 o2 ~2/5 n
o x(1 - x)f00(x) dx
|
--2/5.
|
~Zo
~2 Z 1
1 n o2
(1 - 2x)f0(x) + 1 2x(1 -
x)f00(x) dx = x(1 - x)f00(x) dx,
o
alors la fenetre optimale du premier estimateur est plus
grande que celle du second. En
remplacant la
valeur optimale de h dans l'expression du MISE nous constatons
que
|
l'erreur quadratique moyenne
intégrée trouvée dans le cas de
bfn.
|
fn est inférieure a celle de
|
|
MISE(
|
bfn) = MISE(fn).
|
c. Cas d'un noyau associe gaussien inverse
II Soit g(t) la densité de loi gaussienne inverse telle
que
,
v ~-b ~ t ~~
b
gIG(a,b)(t) = v2ðt3 exp a - 2 + a
2a
t
on t > 0 et (a,b) est un couple de deux réels
strictement positifs La figure 310 donne l'allure
générale de la densité gaussienne inverse
Si X est une variable aléatoire qui suit la loi
gaussienne inverse alors
E(X) = a et V ar(X) = a3/b.
Soit KIG(x;1/h) le noyau gaussien
inverse associé a la variable aléatoire KIG(x;1/h) défini
sur ?x,h = [0, + 8[, de parametres x et 1/h. Ce noyau associé
KIG(x;1/h) se définit comme suit:
~ -1~ t ~~
1
KIG(x;1/h)(t) = v2ðht3 x - 2 + x .
exp 2hx t
Nous vérifions chacune des hypotheses du
noyau associé i.R+ n R+ =6 Ø.
ii.?xR+ = R+.
iii.E(KIG(x;1/h)) = x.
iv. V ar(KIG(x;1/h)) = x3h < 8.
v.h ? 0 V ar(KIG(x;1/h)) = 0.
FIG. 3.10 - Allure générale de la densit
gaussienne inyerse
0 1 2 3 4 5 6
t
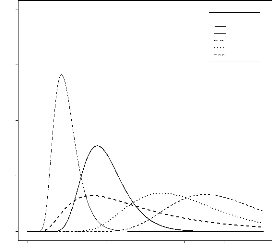
Inverse Geussisn(e,b)
OA 0.5 1.0 1.5 2.0
Inverse Gaussian
a=1 b=10
a=2 b=25
a=3 b=7
a=4 b=30
a=5 b=15
Ainsi le noyau KIG(x;1/h) est un noyau
associé. Les graphiques 311 et 312
présentent l'allure d'une densité gaussienne inverse
quand nous varions x et h.
Pour un échantillon de variables aléatoires iid
X1,X2, . . . ,Xn, nous considérons la
densité de probabilité f inconnue définie
continue sur R+. Soit l'estimateur
bfn de f a
noyau inverse gaussien défini sur
[0, + 00[ tel que:
|
bfn(x) = 1
n
|
Xn
i=1
|
KIG(x;1/h)(Xi)
|
|
=
|
1
n
|
Xn
i=1
|
( -1 (Xi
1
x
q2ðhX3 exp 2hx
i
|
2 +
|
~~
x ,
Xi
|
on le paramêtre h est strictement positif et x est dans
R+.
En tenant compte de ce qui était cité
précédemmentle biais est
{ } = 1
Biais bfn(x)
2x3f00(x)h + o(h),
donc
Z } Z {
Biais2 { }2
bfn(x) dx = 1 4h2
x3f00(x) dx + o(h2).
R+ R+
{ }2
Comme f x3f00(x) dx est finie
alors, pour tout x qui tend vers +00,
x3f00(x)
converge vers 0. D'oñ le biais diminue
quand x augmente.
R+
~-1 ~X1 ~~ q
x - 2 + x = ðhX3 1KIG(x;2/h)(X1),
FIG. 3.11 -- Allure du noyau associe
gaussien inverse pour h = 0.1 et x varie
0 1 2 3 4 5 6

!GM m)
3A
2A 2.5
1.5
0.5 1.0
OA
Inverse Gaussian
x=1
x=2
x=3
x=4
x=5
Nous calculons la variance sur la base des calculs effectues au
prealable.
V ar {:fii(x)} = 1 E
IIKIG(x;1/h)(X1)}21+O(n-1).
L
|
~KIG(x;1/h)(X1)~2 = 1
2ðhX-3
1 exp
|
xh x
-1 (1
2 + x )1
X
X1
|
Soit KIG(x;2/h)(X1) le noyau gaussien
inverse de parametre x et 2/h associe a KIG(x;2/h) et definie sur [0,
+ 8[. Nous verifions simplement les differentes hypoteses liees a
cette variable aleatoire :
R+ n R+ Ø
ii.?xR+ = R+.
iii.E(KIG(x;2/h)) = x.
= x3 h
iv.V ar(KIG(x;2/h)) 2 < 8 .
v. h ? 0 V ar(KIG(x;2/h)) = 0.
En conclusion, il s'agit d'un noyau associe
Tout bien considers

xh x{ -1 (X1
- 2 +
v
2
KIG(x;2/h)(X1) = p2ðhX3 exp
1
Ce qui implique
OA 0.5 1.0 1.5 2.0 2.5
IGNim)
FIG. 3.12 Allure du noyau assoei gaussien
inverse pour x = 2 et h varié
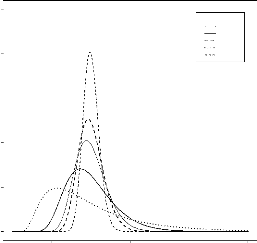
Inverse Gaussian
h=0.1
h=0.2
h=0.4
h=0.7
h=0.9
0 1 2 3 4 5 6
x
et par la suite, nous avons
{ }
X-3/2
E [{KIG(x;1/h)(X1)}2i = v 1 ðhE 1
KIG(x;2/h)(X1) .
2
A partir de l'approximation de
Taylor-Lagrange nous obtenons
{ } { }
X-3/2 K-3/2
E 1 KIG(x;2/h)(X1) = E IG(x;1/h)f(KIG(x;1/h))
= x-3/2f(x) + O(h).
En conclusion, quand x > 0 se situe a
l'intérieur du support, la variance est
.
{ } x-3/2
V ar bfn(x) = v 1 n f(x) +
o(n-1h-1)
2 hð
La variance au bord, quand x/h ? k, présente
quelques différences. Elle est
égale a
,
{ } k-3/2
V ar bfn(x) = v 1 n f(x) +
o(n-1h-2)
2 hð
k étant une constante positive. L'erreur
globale de cet estimateur est
Z { }2 Z
1 1
MISE ÿ=4h2
x3f00(x) dx + v 1 x-3/2f(x)dx.
R+ 2 hð n R+
Nous cherchons a determiner le h optimal. Pour cela, nous
minimisons le MISE par rapport a h, nous trouvons
1
2
Z h R{x3 f" (x)}2 dx
1 1
2h2Or 2n
L+x-3/2f(x)dx = 0,
c'est a dire
h5/2 L+ {x3 f" (x)}2 dx = 1
1
20r n J+ x-3/2 f (x)dx.
Enfin, la fenetre optimale est
2/5
{
-2/5.
1 R o
2v R+ x-3/2f(x)dx ð
hopt = 2 /5 n
[fR+ {x3 f" (x)}2
dx1--
En l'exploitant dans la formule du MISE nous trouvons
14/5 r i 12/5
5 I
MISE(hopt) = 4 121 v ð L+ x-3/2 f (x)dx
x3 f" (x)dx n-4/5.
1 JR+
d. Cas d'un noyau associe gaussien nverse
rcciroque RIIG Nous considerons g(t) la densite de
loi gaussienne inverse reciproque
v ~-bgRIG(a,b)(t) =
v2ð exp t 2a (at - 2 + at )1
on t > 0, a > 0 et b > 0. La figure 3.13
donne l'allure generale d'une densite gaussienne inverse
reciproque. Si X est une variable aleatoire qui suit la
loi gaussienne inverse reciproque alors
|
E(X) = 1
a
|
+
|
1
b et V ar(X) = 1b + 22.
|
SoitKRIG(1/(x-h);1/h)
lenoyaugaussieninversereciproqueassociealavariablealeatoire
KRIG(1/(x-h);1/h) defini sur ?x,h = [0, + co[, de parametres 1/(x - h) et 1/h.
Ce noyau se presente comme suit :
KRIG(1/(x-h);1/h)(t) =
exp
ðht
2 + x ;h)}

2h
h t
x - h
-
1
v2
Nous commencons par verifier chacune des
hypotheses du noyau associe i.{? = [0, + co[} n {?x,h =
[0, + co[} = [0, + co[6= Ø.
ii.?x[0, + co[= [0, + co[.
iii. E(KRIG(1/(x-h);1/h)) = x-h + h = x.
iv. V ar(KRIGo./(x-h)0./h)) = (x - h)h + 2h2 = xh +
h2 < co. v.h ? 0 V ar(KRIG(1/(x-h);1/h)) = 0.
FIG. 3.13 -- Allure generale de la densite
gaussienne inverse réeiirrque
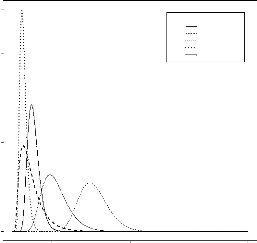
Reciprocal Inverse Gaussian
a=1 b=10
a=2 b=25
a=3 b=7
a=4 b=8 a=0.5 b=5
5
4
3
2
Reciprocal Inverse Gaussian
0 1 2 3 4 5 6
t
Ainsi toutes les conditions du noyau associé
sont satisfaites.
Soit X1,X2, ...,Xn l'échantillon de variables
aléatoires i.id. de densité de probabilité f
b
inconnue définie continue sur ? = R+. Nous
considérons l'estimateur fn de f noyau gaussien
inverse réciproque défini sur [0, + 8[ tel
que
|
bfn(x) = 1
n
|
i=1
|
KRIG(1/(x-h);1/h)(Xi)
|
1
n
=
Xn
i=1
1 x - h (Xi2 x -
v2ðhXi exp 1 2h x - h + Xi) ,
avec h > 0 et x ? R+.
En tenant compte des résultats obtenus
précédemment
Biais {:fii(x) } = 21 x f" (x)h + o(h),
et donc
FIG. 3.14 -- ????r? ?? ?\u9313‡A?? ?ss??e
???ss??? ????rs? ré???rq?? ??r x
= 2 ?t h ??r?e
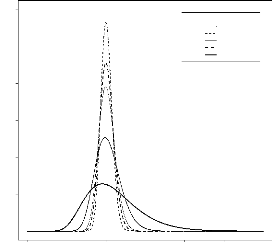
MOO /10
3A
2A 2.5
1.5
0.5 1.0
OA
Reciprocal Inverse Gaussian
h=0.1 h=0.2 h=0.4 h=0.7 h=0.9
0 1 2 3 4 5 6
x
En refaisant les calculs de la variance de la même
facon nous trouvons
si x/h ? 8 si xfi.1 k.
V ar {fn(x)} ~
|
?
????
????
|
1 x -1/2f
|
(x) + O(n-1)
+ 7 k3/2) + O(n-1)
' 16
|
|
2nvhð
1 (k-1/2
|
|
2nhvð
|
La fenêtre optimale est egale à
|
hopt =
|
( 1 )2/5 {L#177; x-1/2f
(x)dx}2/5
200
[fR#177; {xf"(x)}2 dx12/5
|
n-2/5.
|
En conclusion, nous evaluons le MISE en fonction de cette valeur
hopt:
M I S E(hopt) = #177; (20r)
1 2/5 {fly
[fR#177; {xf"(x)}2 dx]
x-1/2f (x)dx 12/5
2/5 n-2/5.
e. Remarques:
i. ????? ?? s???rt ?? ?\u9313‡A?? ?ss??e ?x,h ??
?e???? ??s ?? ?? x ?? ?? h ??rs ?e?
?\u9312‡@?????s q?? ??s ???s
tr??té?
ii. ???s ???\u9312‡@?r?ss?? ?? ??
???êtr? ?t?????? ?? ???s?it ?????? f ?t s?
?ér??é? s????????r??t ???s ?? ???er?t??r ?t ??
?e???er?t??r ??tr??r????t ?? ??a
\u9313‡A?éet?i?? o f s? tr???
s???????t ?? ?e???er?t??r ?? ??s ????s ???i? ???nne ???????
?nt? ? ?a s\u9313‡A?etr?q?? ?t
?s\u9313‡A?etr?q??? ??rs ??r
????ttr? ? ?ée??? ?"??????? ???? ?ée??????st???t?? ??
??r??etr? h? f ??t
s\u9313‡Aste??t?q?????t s???r? ??? ?? ??t????
?a\u9313‡A?é? tr?q?? ??
s???rt R? P?r ?\u9312‡@?????? ???s ?? ??s ??s
?\u9313‡A??\u9312‡@ ?ss??és ?????? ???ss???????rs?
?t ???ss??? ????rs? re???rq??? ??s
???s?s ?? f s??t ??? ??
?s\u9313‡A?etr?q???e??? s?r R+? ???s ??
??s ??s ?\u9313‡A??\u9312‡@ ?ss??es ?êt?? ?? ???s?it
??i ???nne ? ?? ???or [0,1]?
3.2 Cas multivarie
defini sur de dimension d. L'estimateur
Dans cette section, nous généralisons
lestimateur a noyau associé continu
asymétriqueaucasmultidimensionnel.Pourcela,nousconsidéronsunéchantillondevariables
aléatoires X1,. . . ,Xn i.i.d., de densité de
probabilité f continue asymétrique inconnue
fn de f a noyau associé continu
asymétrique est
|
fn (x) = 1
n
|
Xn
i=1
|
Kx,H (Xi) , (3.17)
|
on la cible x =t (x1, ... ,xd), H est la matrice
pleine de variance-covariance des fenêtres h de dimension d x d,
et Xi =t (Xi1, . . . ,Xid). La fonction
Kx,H est le noyau associé
asymétrique sur Rx,h.
Pareillement,nousdonnonsunestimateurquisebasesurleproduitdesnoyauxunivariés
asymétriques. Get estimateur a une forme plus
vulgarisée que celle de (3.17). En effet, nous
avons
|
fn (x) = 1
n
|
Xn
i=1
|
? ?
?
|
d
j=1
|
Kjxj,hj (Xij)
|
???
|
,
|
(3.18)
|
on xj est la jeme composante du vecteur x, hj est
la jeme fenêtre et Xij est la ieme observation de la
jeme composante.
|
bfn(x) = 1
n
|
Xn
i=1
|
Kx,h (Xi), (4.6)
|
Chapitre 4
Noyau associé discret
Le nombre de travaux abordant les estimateurs a
noyau pour des données discrètes reste limité.
Dans ce chapitre, nous présentons deux types de
noyaux associés discrets. La première section porte
sur les noyaux associés discrets pour des données
catégorielles on les données sont
qualitatives ordonnées et définis sur un ensemble fini
inclu dans N que nous désignons Rx,h. Ensuite,
dans une deuxième partie, nous introduisons le noyau
associé discret pour des données de comptages. Une
première tentative dans ce cadre, uniquement de
manière expérimentale a été proposé par
Marsh & Mukho
padhyay(1999).Nousétudionslespropriétesponctuellesetglobalesdechacundesdeux
estimateurs a noyau associé discret Différentes
techniques de selection de la en:tre du lissage sont
proposées. Enfin,nous généralisonslestimateur a
noyau associé aucasmultivarié.
Definition 1: ??t x ?\u9312‡@( ???s R ?t h > 0?
\u9670·?s ??????s ??\u9313‡A?? ?ss??e ??s?r?t?
Kx,h? t?t? ???t?? ?? ??ss? ?? ?r??????té
??s?rt? ????? ??r????? ??l?t?i? Kx,h s?r ?? s???rt Rx,h?
t??s q???
Rx,h n R=6 Ø (4.1)
?xRx,h ? R (4.2)
E(Kx,h) ~ x quand h ? 0 (4.3)
V ar(Kx,h) < 8 (4.4)
V ar(Kx,h) ? 0 quand h ? 0. (4.5)
Commentaire: Nous vérifions dans ce qui
suit, que dans le cas du noyau associé discret
pour des données catégorielles, le support Rx,h
coincide avec R. Nous verrons que dans certaine situation, ce n'est
pas toujours vérifié comme dans le cas des
données de comptage; Rx,h dépend de x et ne
se colle pas avec le support R.
Definition 2:: ??t X1,. . . ,Xn ?? (????t???? ??
??r?????s ??e?t?r?s ?????? ?? ???t???? ??ss? ??
?r??????te f ??s?ret? ??????? s?r R? ???st???t??r a ?\u9313‡A??
?ss??e ??i?r?t
b
fn =fn,h,K ?? f ?st ?e??? ??r
avec x ? ? et h > 0.
Propriété 1: Soit x fixé dans ?. Nous
avons
E {:In(x)} = E {f(Kx,h)} . (4.7)
Démonstration: En effet, nous trouvons successivement
(
1 n
E {In(x) } = E n EKx,h(Xi)
i=1
= E {Kx,h(X1)}
|
X=
y??x,h
|
Kx,h(y)f(y)
|
|
X=
y??x,h
|
f(y) Pr(Kx,h = y)
|
|
= E{f(Kx,h)} .
·
|
|
|
Propriété 2: Soit f une fonction discrete de
support ?. Soit
|
b
fn l'estimateur de f à
|
noyau associé discret Kx,h sur ?x,h.
Nous supposons que ?x ? ?,?x,h ? ?. Alors, nous avons
|
E{in(x)} = E
|
f(t)Kx,h(t) ? f(x) quand n ? +8.
|
t??n?x,h
Démonstration:Nouspartonsdel'espérancede
bfn(x)quiestégaleaEt??n?x,h f(t)Kx,h(t). Nous calculons
sa différence avec f(x). Pour cela, ? ä > 0 tel
que
|
trn(x)} f(x) =
|
~~~~~~
|
X
t??n?x,h
|
{f(t) - f(x)} Kx,h(t)
|
~~~~~~
|
|
X
=
|t-x|<ä
|
|f(t) - f (x)| Kx,h(t) + E
|t-x|>ä
|
|f(t) - f(x)| Kx,h(t).
|
Pourcalculerlepremierterme,nousavonsrecoursaladéfinitiondelacontinuitédansle
cas discret (cette notion de continuité est différente par
rapport a celle du cas continu) f estcontinueen x ? ? € > 0, ? ä
> 0telque? t ?]x-ä,x+ä[n?x,h |f(t)-f(x)|
< E. Ce qui implique
|
X
|t-x|<ä
|
|f(t) - f(x)|Kx,h(t) = E.
|
La fonction f est discrete donc elle est bornée par 1 et
nous obtenons successivement
|
X
|t-x|>ä
|
|f(t) - f(x)|Kx,h(t) = ä22 Pr (|Kx,h
- x| > ä)
|
2 2
ä2V ar (Kx,h) + ä2 {E (Kx,h ) -
x}2 .
Finalement,souslesdeuxconditions(43)et(4.5)toutecettequantitéconvergevers
0.
b
Propriété 3: Soit x fixé dans ?. Le biais
ponctuel de l'estimateur fn de f a noyau associé
discret est
Biais {1n(x) } = E {f(Kx,h)} - f(x)
= f {E(Kx,h)} - f(x) + 1 V ar (Kx,h) f
(2) (x) + o(h). (4.8)
Démonstration: Par définition,le biais est la
différence entrelespérance delestimateur
b
fn et la densité inconnue f. En effet, d'apres
le résultat (4.7) nous avons
E{fn(x) } = E {f(Kx,h)}
.
Or,enutilisantundeveleppomentlimitéaupointmoyen
mx,h = E(Kx,h),nousobtenons
f(Kx,h) = f(mx,h) + (Kx,h - mx,h)f(1)(x)
+ 12(Kx,h -
mx,h)2f(2)(x) + o(h). Et en prenant
l'espérance mathématique, nous avons finalement
1
E{f (Kx,h)} = f {E(Kx,h)} + 2 V ar(Kx,h)
f (2) (x) + o(h).
Remarque: Nous mentionnons que les
fk(x) d'ordre k = 1 représentent les différences
finies qui viennent remplacer les dérivées dans le cas
continu et qui vérifient
f(k)(x) = { f(k-1)(x)}
et f0(x) =
{f(x + 1) - f(x - 1)} /2 si x ? N* f(1) - f(0)
si x = 0.
? ???
???
Propriété 4:: Soit x fixé dans ?. La
variance ponctuelle de l'estimateur bfn =fn,h,K de f a
noyau associé discret est
V ar {In(x) } =ÿ1
nf(x)Pr(Kx,h = x).
(4.9)
Démonstration: La variance est donnée de maniere
successive par
( n
V ar {:fii(x) } = V ar K x,h(Xi)}
n i=1
V ar {Kx,h(X1)}
1
E {Kx,h(X1)}2 - n [E {Kx,h(X1)}]2
1
=
n
1
n
=
}2
1
n
? ? ?
=
f (y) {Pr(Kx,h = y)}2 - 1 n?E f (y)
Pr(Kx,h = y)
yENx,h ?yENx,h
1
n
=
n1 {f (x) E(K,h) - f2(x) } +
O(n) f(x) Pr(Kx,h = x).
Nous précisons que le terme E(K2x,h) :=
Ey??x,h {Pr(Kx,h = y)}2 est majoré par 1.
Le
résultat final se base sur la condition (4.3) a traversla
probabilité modale Pr(Kx,h = x).
Propriété 5: L'erreur
quadratique moyenne
intégrée que nous appelons MISE est
|
X
MISE =
x??
X=
x??
|
E{in(x) - f(x)}2 Biais2
{.-fii(x)} + E
x??
|
V ar {:fii(x)}
|
12
= E {E(Kx,h) - f (x) + 21 V
ar(Kx,h)f(2)(x) + o(h)
x??
|
+ E
x??
|
1
n
|
f(x)Pr(Kx,h = x). (4.10)
|
4. 1 Noyau associé discret pour des données
catégorielles
Dans cette partie, nous nous focalisons sur les données
discretes catégorielles (i.e. données
qualitatives). Nous travaillons essentiellement sur un ensemble discret
fini ? ? R. Nous signalons que durant les dernieres
annéesily avait une croissanceconsidée rable dans le
domaine des noyaux discrets pour des données
catégorielles, lesles premiers travaux sont dfis aux
innovateurs Aitchison & Aitken (1976) puis Simonoff & Tutz (2000) et
enfin, Racine & Li (2007). (voir bibliographie pour plus de
détails.)
Définition 3: Soit X la variable aleatoire de loi
d'Aitchison & Aitken que nous notons D(c; c0,A), on c ?
N \ {0,1} est le cardinal du support, c0 ? {0,1,. . . ,c - 1} est le point
de reference et A ?]0,1], de densite de probabilite sur le
support ? = {0,1, . . . ,c - 1} definie par
|
Pr(X = x) = (1 - A)1x=0 + c A - 1
|
1x6=c0.
|
Propriété 6: L'espérance de la variable
aléatoire X de loi d'Aitchison & Aitken est
A
E(X) = c0(1 - A Ac (4.11)
c - 1 2
4.1. NOYAU ASSOCIR DISCRET POUR DES DONNRES CATRGORIELLES 69
Demonstration:L'esperancedecettevariablealeatoireestdonnéedemanieresuccessive
par:
E(X) = E x Pr(X = x)
x?{0,1,...,c-1}
+
c xë11x,c0
E { x?{0,1,...,c-1}
= {c0(1 -- ë) + c ë 1(0+ 1 + ... + (c0 -- 1)
+ (c0 + 1) +...+c -- 1)1
( ) }
= c0(1 -- ë) +
c ë -- 1 i c00
c(c -- 1)
= c0(1 -- ë) + c -- ë 1 1 2 c0}
c0 (1 ë ë ) ëc
c 1 2
Propriete 7: La variance de la variable aleatoire X de loi
d'Aitchison & Aitken est
V ar X 2 c2ë (1 -- ë) -- ëc
( ) =
0(c -- 1)2
2
ëc (2c 3 -- 1 ë 2c)
. (4.12)
c0
c -- 1
c2ë(1 -- ë) -- ëc
+
Demonstration: La variance est obtenue de maniere successive
par
V ar(X) = E(X2) -- {E(X)}2
(c-1 ) -- co = c20(1 -- ë) + c ë
Ei2 c,0--{c0 (1 -- ë
c ë 1 )) ëc
2 f
i=0
|
= c20(1 -- ë) +
|
ëc(2c -- 1) ëc8
{c0 (1 -- ë -- ë ) ëc1
c -- 1 ) 2 j
6 c -- 1
|
2
|
2
ë
2c2
ë
= c0 2 (1 -- ë
c 1
ë ) 6 Ac(2c -- 1) 2
c0 (1 -- ë
c -- 1 ) 4
--c0ëc (1 -- ë -- ë )
c -- 1
(c -- 1)2
c0
c -- 1
2 c2ë(1 -- ë) -- ëc = c0
Commentaires::
c2ë(1 -- ë) -- ëc
+
ëc (2c -- 1 ëc)
.
·
2 3 2
a. Lorsque c = 2, nous nous retrouvons dans le cas
dune loi Bernoulli de parametre ë ou 1 -- ë. Le type de la
loi Bernoulli change selon que le point de reference se
trouve en 0 ou en 1. Nous verrons dans le cas de lestimateur a noyau
associe discret que le choix du point de reference sera la cible.
b. Lorsque c 7? +8, le support ? = N.
c. Si ë = 0, ceci revient a dire que notre loi
est la loi de dirac qui ne depend plus
FIG. 4.1 -- ???str?t?? ?? ?? ?? ????t???s? ?t ??t???
Densité de loi Aitchison et Aitken

OA 02 0.4 0.8 0.8 1.0
Pr
0 8
4
2
x
de c et que nous la notons äx. Si
maintenant, ë prend la deuxieme valeur limite qui est
egale a 1 alors Pr(X = x) = 1 1
c-1 x,c0.
Nous sommes en mesure de donner une definition precise dun
estimateur a noyau associe discret pour une densite de probabilite f
sur un ensemble discret ? et de presenter les proprietes fondamentales
relatives
Definition 4: ??t X1,X2,. . . ,Xn ?? e????t???? ??
??r?????s ??e?t?r?s ?????? ?? ???
t??????ss????r??????te??s?ret???té?r?????r???é???????
f s?r? = {0,1,...,c - 1}?
ùc ?st ???? ?t ?\u9312‡@e ???s N \ {0,1}?
U? ?st???t??r bfn(x) =
b
fn,h,K(x) ?? f(x) a ?\u9313‡A?? ?ss??e ??s?r?t
KD(c;x,h) q?? s??t ?? ?? ????t???s? & ??t??? ?st
?e??? ??r
|
fn(x) = 1
n
|
Xn
i=1
|
KD(c;x,h)(Xi) (4.13)
|
|
1
n
|
E- h)1Xi=x + h 11Xi,=x} .
i=1
|
???? x ?st ???s ? ?t h ?]0,1] ?st ?? ??r??etr? ??
??ss??? ??s?r?t ?? ???r? ?? ???êtt??? Nous
examinons les differents points que doit verifier le
noyau associi KD(c;x,h):
i.?c;x,h = {0,1, . . . ,c - 1} = ?.
4.1. NOYAU ASSOCIE DISCRET POUR DES DONNEES CATEGORIELLES 71
FIG. 4.2 -- ???str?t?? ?? ?\u9313‡A?? ?ss??e ???t???s?
?tet ??i??? ??r h = 0.2 ?t x ??r?e

0.0 02 0.4 0.6 0.8 1.0
D(c;x,h)(y)
0 2 4 6 8
y
ii.?x?c;x,h = {0,1,...,c 1} = ?.
iii. E (KD(c;x,h)) = x (1 h ch 1) + hc~ x
quand h ? 0.
iv. V ar (KD(c;x,h)) = x2
hc2((1-h)2-hc xhc2
(1-h)-hc + hc (2c-1 h2c) < 8.
c-1 2 k 3
v. h ? 0 V ar (KD(c;x,h)) = 0.
Propriété 8: A travers la formule (4.8), la
fonction x 7? bfn(x) est une fonction de masse de
probabilité.
Démonstration: Comme les Xi sont i.i.d., nous avons
successivement
|
Ec- 1
x=0
|
fn(x) =
|
c- 1 {1 n
=0 n D(qx,h)(Xi)
x } i=1
|
c- 1
E {(1 h)1X1=x + h
c 11X1'=x
x=0
= (1 h) + ch 1(1 + 1 + ... + 1)
= (1 h) + ch 1(c 1) = 1.
FIG. 4.3 -- ???str?t?? ?? ?\u9313‡A?? ?ss??e ???t???s?
?tet ??i??? ??r x = y = 2 ?t h ??r?e

0.0 02 0.4 0.6 0.8 1.0
D(c;x,h)(y)
0 2 4 6 8
y
b
|
Propriété 9: D'après la relation (4.8), le
biais de l'estimateur
|
fn de f a noyau associé
|
|
|
{ I
2hc
(
2c 1
+
hc
)}
Biais{fn()} x) = hc f(1)(x) + - xhc + f
(2) ( 2)
x) + o(h.
2 2 lc - 1 2 3 2
(4.14) Remarque: \u9670·?s
r???rq??s ????res ?????? q?? ?? ????s
?stest rs ???rr??t? ? ?d????? a ?? ??s ??
c? h ?t ??s ?er??e?s ?r???er? ?t s??????
???q?? ??s q?? ? ??r??????? s???rt
c ??????t? ?? ????s s????r?t? \u9670·?s ????s ???s?
???s?r a r???i? ? ????i ?? ??????t ??s
??r??etr?s ???? ???s ??le ??s ??s ?\u9313‡A??\u9312‡@
?ss??ie ?a\u9313‡A?éet?i??e
????u ?re??se????t ??s
?\u9313‡A??\u9312‡@ ????? ?t ?et? ?? ????? ???ss??? ???er?
?e ???us??? ???er? re???rq?? ??
???????t? \u9670·?s ??tr?s q?? ?? ??st ??s ?????t ??
?de?e????e ?e??a???etr?s? ????????t? ???
??c? ?ss???? ??r ??le
é???r? ??s?is? a ?r???d? ??? ? ???ntr??? c0
???? ? ???t ?? ????? ??sse ??r ??s
?\u9313‡A??\u9312‡@ r????????r?e ???i
??????g???????r ???s ??
?et???s??
b
|
Propriété 10: D'après la relation (4.9), la
variance de l'estimateur associé discret KD(c;x,h) de loi
d'Aitchison & Aitken est
|
fn de f a noyau
|
h \2 {c-1
V ar {:fii(x)} = 1 [f(x)(1 - h)2 + (c -
1) f(i) - f (x) }1. (4.15)
i=0
4.2. NOYAU ASSOCI] DISCRET POUR DES DONNÉES DE COMPTAGE
73
4.2 Noyau associé discret pour des données de
comptage
Pareillement a la section précédente, nous
donnons dans cette partie lestimateur a noyau associé discret
pour des données de dénombrement Noustravaillons essentiellement
sur un ensemble fini (ou encore n'importe quel ensemble
dénombrable notamment Z, N + qN, etc). Nous calculons les
propriétés fondamentales pour cet estimateur en utilisant les
différences finies ala place des dérivées. Nous
présentons dans a suite 4 exemples de noyaux associés
discrets symétriques et standards
asymétriques.
4.2.1 Noyau associé poissonien
Nous rappelons qu'une loi de Poisson Po(A) de
paramètre A est une loi discrète définie sur N de fonction
de masse de probabilité Pr(X = x) telle que pour tout x dans
N, nous avons
Pr(X = x) = e-ë Ax x!.
Si X est une variable aléatoire qui suit la loi
Poisson alors lespérance et la variance sont respectivement
égales a
E(X) = A et V ar(X) = A.
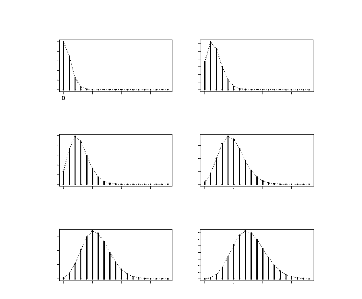
0 5 10 15
x=5
0 5 10 15
x=7
0 5 10 15
y
0 5 10 15
y
FIG. 4.4 Illustration du noyau associ poissonnien pour
h = 0.1 et x variée
x=0
5 10 15
x=2
x=1
?
?
?
?
?
? ? ? ? ? ? ? ? ? ? ? ? ?
0 5 10 15
x=4
0.00 0.15 0.30
0.0 02 0.4
Probab(y)
Probab(y)
0.00 0.10 0.20
?
?
?
?
?
?
? ? ? ? ? ? ? ? ? ? ?
0.00 0.10
?
?
?
?
?
?
?
?
? ? ? ? ? ? ? ?
Probab(y)
0.00 0.10
?
?
?
?
?
?
?
?
?
?
? ? ? ? ? ? ?
0.00 0.06 0.12
?
?
?
?
?
?
?
? ? ? ?
?
?
?
? ?
?
?
? ? ? ? ? ? ? ? ? ? ? ? ? ? ?
?
?
La figure 4.4 illustre la variation de la fonction de
masse poissonienne pour h = 0.1. Soit KPo(x+h) le noyau poissonien
associé a la variable aléatoire KP o(x+h) sur x,h = N
tel que:
avec x ? N, y ? N et h > 0 est le parametre de
lissage discret. Ce noyau poissonien KPo(x+h)(y) =
e-(x+h)(x +
!
vérifie-t-il la définition d'un noyau
associé? En effet nous avons
i.? n ?x,h = N n N = N=6 Ø. ii.?xN = N.
iii.E (KP o(x+h)) = x + h ~xquand h ? 0.
iv. V ar (KPo(x+h)) = x + h < 8. v.h ? 0 V ar (KP
o(x+h)) = x.
Soit ,Xn un échantillon de variables
aléatoires i.i.d . de fonction de masse de
probabilité discrete inconnue f définie
sur un ensemble discret ? = N. L'estimateur fn de f a noyau
associé poissonien est défini par
|
bfn(x) = 1
n
|
Xn
i=1
|
KPo(x+h)(Xi)
|
1
n
=
Xn
i=1
e-(x+h) (x + h)Xi
Xi! ,
avec x ? N et h > 0.
Cet estimateur est-il une fonction de masse de
probabilité? Non, en effet
|
X8
x=0
|
bfn(x) =
|
t° {1 KPo(x+h)(Xi)}
x=0 n i=1
|
=
X8
x=0
{KPo(x+h)(X1)}
=
~
X8 ~
e-(x+h)(x + h)X1 .
X1!
x=0
Nous avons calculé cette quantité
numériquement sous R, pour plusieurs valeurs de h et de X1,
nous avons abouti a des valeurs tres faibles par rapport a 1 Enfin,
lestimateur
b
fn(x) n'est pas une fonction de masse de
probabilité
Nous évaluons ainsi le biais et la variance de lestimateur
a noyau associé poissonien.
b
En se basant sur la relation (4.8), le biais ponctuel de
fn(x) en un point x fixé est
Biais {jn(x) } = h f (1) (x) +
21 (x + h)f(2)(x) + o(h).
b
|
De même, d'apres la relation (4.9), la variance de
|
fn(x) en un point x fixé est
|
V ar {fl(x)} = n x f(x)(x + ! e-(x+h).
Enfin, la valeur du MISE est
|
MISE(n,h,f) = 1 E
n x?N
|
(x + h)x f(x) x!e
|
2
-(x+h)+ E {hf(1)(x) + 21 (x+h)
f(2) (x) + o(h) } .
x?N
|
4.2. NOYAU ASSOCI] DISCRET POUR DES DONNÉES DE COMPTAGE
75
4.2.2 Noyau associé binomial
Nous rappelons qu'une loi binomiale de
paramètres N et p, B(N,p) est une loi discréte définie sur
l'ensemble {0, . . . ,N}, avec N est un entier fixé dans N, de fonction
de masse de probabilité gB(N,p) telle que
N_x
.
N!
x!(N - x)!
Pr(X = x) = px(1 - p)
Si X est une variable aléatoire qui suit la loi
binomiale alors lespérance et la variance sont respectivement
E(X) = Np et V ar(x) = Np(1 - p).
La figure 4.5 présente l'allure de la
densité d'une loi binomiale quand nous fixons la
fenêtre h et nous faisons varier x. Par ailleurs, la figure
4.6 donne la variation de cette densité quand nous varions h
et nous gardons x fixé en 7.
FIG. 4.5 Illustration du noyau associ binomial pour
h = 0.1 et x varié.
x=0 x=1
2 4 6 8 10 0 2 4 6 8 10
x=2 x=4
0 2 4 6 8 10
x=5
0 2 4 6 8 10
x=7
0 2 4 6 8 10
0 2 4 6 8 10
y

Probab(y)
0.0 0.4 0.8
?
?
? ? ? ? ? ? ? ? ?
0.0 0.2 0.4
?
?
?
? ? ? ?
? ? ? ?

Probab(y)
0.0 0.2 0.4
?
?
?
? ? ? ? ? ? ?
0.0 02 0.4
? ?
?
?
?
?
? ? ? ? ?
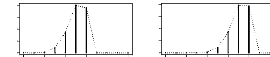
Probab(y)
0.0 0.2 0.4
? ? ?
?
?
? ? ? ?
0.0 0.2 0.4
?
? ? ? ?
?
?
? ?
Le noyau KB(x+1,(x+h)/(x+1)) est le
noyau discret associé a la variable aléatoire
KB(x+1,(x+h)/(x+1)) de loi binomiale défini sur le support ?x,h =
{0,1,.. . ,x + 1} tel que
,
fx + h ~y f1 - h ~x+1_y
KB(x+1,(x+h)/(x+1))(y) = (x + 1)!
y!(x + 1 - y)! x + 1 x + 1
FIG. 4.6 -- Illustration du noyau associe binomial
pour x == y7 et h varie.
0.0 0.2 0.4

h=0.1

?
?
?
?
? ? ? ?
? ?
0 2 4 6 8 10
h=0.4

Probab(y)
0.0 0.2 0.4
h=0.2
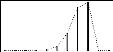
?
?
?
?
? ? ? ? ?
? ?
0 2 4 6 8 10
h=0.6

0.0 0.2 0.4 0.6
0.0 0.2 0.4
Probab(y)
?
?
?
?
?
? ? ? ? ?
? ? ? ? ? ?
? ?
? ?
0 2 4 6 8 10
h=0.7
?
0 2 4 6 8 10
h=0.9

0.0 0.4 0.8
Probab(y)
0.0 0.4
?
?
?
? ?
? ?
? ? ? ? ? ?
? ? ? ? ? ? ?
0 2 4 6 8 10
y
0 2 4 6 8 10
y
on x est dans N et h est dans [0,1]. Nous verifions a ce
niveau que KB(x+1,(x+h)/(x+1)) est un noyau
associe. En effet nous avons
i. ?x,h n ? = {0,1,...,x + 1} n N = {0,1, ,x + 1} =6 Ø.
ii.?x?N {0,1, . . . ,x + 1} = N.
E(KB(x+1,(x+h)/(x+1))) = (x + 1)(x + h)/(x +1) =x+ h ~ x
quand h ? 0. iv. V ar(KB(x+1,(x+h)/(x+1))) = (x + h)
(x--+11) < co.
v.h ? 0 V ar(KB(x+1,(x+h)/(x+1))) = x
x+1 < 1.
Pour le meme echantillon de variables aleatoires considers nous
donnons lestimateur
b
fn de f a noyau associe binomial defini sur
?x,h = {0,1, . . . ,x + 1} comme etant
|
bfn(x) = 1
n
|
i=1
|
KB(x+1,(x+h)/(x+1))(Xi)
|
1
n
Xn
i=1
((x + 1)! x + h Xi 1 - h x+1--Xi
,
Xi!(x + 1 - Xi)! x + 1 x + 1
avec x ? N et h ?]0,1]. D'apres (4.8), le biais est
B iais { in(x)} = h f (1) (x) +
2 (x + h) (x 1 f (2) (x) + o(h).
|
fn(x) = 1
n
|
i=1
|
KBN(x+1,(x+1)/(2x+1+h))(Xi)
|
|
1
n
|
i=1
|
+ Xi)! Xi!x!
|
~x + h yX% x + 1 2x + 1 + h) 2x + 1
+ h)
|
4.2. NOYAU ASSOCIR DISCRET POUR DES DONNRES DE COMPTAGE 77
Pareillement, d'après (4.9), la variance est
|
V ar {1n(x)} =
|
1 - h ~x + h ~
n x + 1
|
x
|
f(x).
|
Enfin, le MISE est obtenue en sommant les deux
quantités calculées précédemment. Nous
trouvons
~x + h ~x
X
1 - h
MISE(n,h,f) = f(x)
n x + 1
xEN
2
.
+ {hf(1)(x) + 2 1(x +
(x + 1) f (2) (x) + o(h)}
1 - h

x?N
4.2.3 Noyau associe binomial negatif
Nous rappelons qu'une loi binomiale
négative de paramètres s et p, BN(s,p) est une loi
discréte définie sur le support N de fonction de masse de
probabilité gBN(s,p) telle que
gBN(s,p)(x) = (x + s)! ps (1 p)x.
x!s!
Si X est une variable aléatoire qui suit la loi
binomiale négative, alors lespérance et la variance
sont respectivement
E(X) = s(1 - p)/p et V ar(x) = s(1 - p)/p2.
Soit KBN(x+1,(x+1)/(2x+1+h)) le noyau associé a
la variable aléatoire KBN(x+1,(x+1)/(2x+1+h)) de loi binomiale
négative défini sur le support ?x,h = N tel
que
,
KBN(x+1,(x+1)/(2x+1+h))(y) =

(x + y)! x + h y x + 1
)x+1
y!x! 2x + 1 + h 2x + 1 + h
on x et y appartiennent a N et h est strictement positif. Nous
vérifions quil sagit dun noyau
associé
i.N n N = N=6 Ø.
?x?x,h = ?xN = N.
E(KBN(x+1,(x+h)/(2x+1+h))) = x+h ~xquand h ? 0.
iv.V ~2x+1+h ~
ar(KB(x+1,(x+h)/(x+1))) = (x + h) < 8.
x+1
~
v.h ? 0 V ar(KB(x+1,(x+h)/(x+1))) = x ~2x+1
.
x+1
Pour notre même échantillon de variables
aléatoires nous donnons lestimateur fn de f a noyau
associé binomial négatif défini sur?x,h = N
comme étant
FIG. 4.7 -- Illustration du noyau associe binomial
négative pour h = 0.1 et x varie
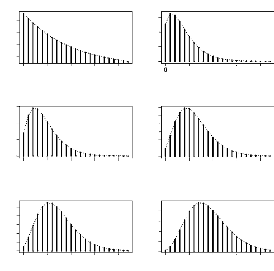
y
y
x=0
?
?
?
?
?
?
?
?
?
?
?
?
?
? ? ? ? ? ? ?
0 5 10 15 20
x=2
?
?
?
?
?
?
?
?
?
?
?
? ? ? ? ? ? ? ? ? ? ?
0 5 10 15 20
x=5
x=1
5 10 15 20
x=4
?
?
?
?
?
?
?
?
?
?
?
?
? ? ? ? ? ? ? ?
0 5 10 15 20
x=7
0.02 0.06
Probab(y)
0.00 0.05 0.10 0.15
Probab(y)
0.00 0.10
0.00 0.06 0.12
?
?
?
?
?
? ?
? ?
?
?
?
?
?
?
?
?
?
?
? ? ? ?
0 5 10 15 20
? ?
? ?
?
?
?
?
?
?
?
?
?
?
?
? ? ? ? ? ? ?
0 5 10 15 20
0.00 0.04 0.08
0.00 0.04 0.08
Probab(y)
?
?
?
?
?
?
? ?
? ? ? ? ? ? ? ? ? ?
?
?
?
avec x E N et h E R*+ .
Le ibiais de cet estimateur est
Biais {:fii(x)} = h f (1) (x) +
21 (x + h) (2x x + 1 + 1 + h f (2) (x)+o(h).
D'apres (4.9), la variance est
1 2x + hx x + 1 )x+1
nx!( 2x + 1 + h
V ar {:fii(x)} =
2x + 1 + h f(x).
En final, le MISE est la somme des deux derniers resultats. IlII
est egal à
|
MIS E(n,h, f) = 1 E n
xEN
|
2 ( x + hx x + 1 V+1 \
x! 2x + 1 + h) ( 2x + 1 + h) f(x)
|
2
+ E {h f (1) (x) + 2(x + h) (2x x +
1 1+ h f(2) (x) + o(h) } .
xEN
4.2.4 Noyau associe triangulaire
EnsereferantauxtravauxdeKokonendjietSengaKiesse(2007)surlesdistriibutions
triangulaires discretes, nous rappelons quune loi
triangulaire Ta,h,c de parametres a
4.2. NOYAU ASSOCIR DISCRET POUR DES DONNRES DE COMPTAGE 79
et c dans N et h dans R+ est une loi discrete centrée en c
et de bras a défini sur ?a,c = {c,c #177; 1, . . . ,c #177; a} de
fonction de masse de probabilité:
|
Pr (Ta,h,c = y) =
|
(a + 1)h - |y - c|h
P(a,h)
|
,
|
on P(a,h) est la constante de normalisation telle
que
a
P(a,h) = (2a + 1)(a + 1)h - 2 i=0 ih.
Nous remarquons que le cas h = 1
correspond a la variable aléatoire triangulaire
symétrique. Le cas h = 0 n'est pas défini
en c et en particulier, si h = 0 nous nous retrouvons la loi de Dirac
d'espérance c. Si h tend vers l'infini, nous trouvons la loi uniforme
Pour des entiers non nuls h ? R*, la constante de normalisation peut
s'écrire:
|
P(a,h) = (2a + 1)(a + 1)h - 2
|
a
i=0
|
(-1)h--i+1)h!Bh--i+1 i!(h - i + 1)! ai,
|
on Bh--i+1 est le nombre de Bernoulli. La figure 4.8
présente l'allure de la densité triangulaire par
rapport aux autres noyaux discrete que nous avons
étudié.
Si X est une variable aléatoire qui suit la loi
triangulaire alors lespérance et la variance sont
respectivement :
ih+2) .
a
E(X) = c et V ar(X) = 2E P(a,h) 3
i=0

1 a(a + 1)h+1(2a + 1)
La loi Ta,h,c est symétrique autour
de sa moyenne De plus la variance ne dépend pas de c.
Soit KT(a,h,x) le noyau
triangulaire associé a la variable aléatoire
KT(a,h,x), défini sur {x,x #177; 1, . . . ,x #177;
a} et donné par
(a + 1)h - |y - x|h
KT(a,h,x)(y) = (2a + 1)(a + 1)h - 2 Eaj=0 jh,
avec x ? N, h > 0 et a ? N.
Nous nous assurons des diférents points de la
définition 1
i.{x,x #177; 1,...,x #177; a} n N = {x,x #177; 1, . . . ,x #177;
a} =6 Ø. ii.?xEN {x,x #177; 1, . . . ,x #177; a} = N.
iii.E (KT (a,h,x)) = x.
iv.V ar (KT(
Nh#177;if2a
(a(a+1) k ) 2 E 3a. 0 jh+2)
< 8.
a,h,x)) = P(a1 ,h) 3
v.Lorsque h ? 0, la variance de
KT(a,h,x) tend aussi vers 0. En effet, ce résultat
a été obtenu dans la proposition (2.4) des travaux de
Kokonendji, Senga Kiessé et Zocchi (2007). Dans
cette proposition, nous montrons que la variance de la variable
aléatoire converge vers une loi de Dirac ce qui
implique une variance nulle (voir aussi la remarque
2.3(ii))
FIG. 4.8 -- ???str?t?? ?? ?\u9313‡A?? ?ss??e
tr????????r? ??r ???ér??t?e ?????rr ??
h?

Soit X1, ... ,Xn l'échantillon de variables
aléatoires i.i.d . de densité f inconnue définie
b
sur N. Nous donnons l'estimateur fn de f a
noyau associé triangulaire défini sur ?x,h
=
{x,x #177; 1, . . . ,x #177; a} comme étant:
|
bfn(x) = 1
n
|
Xn
i=1
|
KT(a,h,x)(Xi)
|
1
n
=
Xn
i=1
(a + 1)h - |Xi - x|h
(2a + 1)(a + 1)h - 2 Eaj=0 jh,
avec x ? N, h > 0 et a ? N. Le noyau
KT(a,h,x) est le noyau associé
défini sur ?a,x,h = {x,x #177; 1, . . . ,x #177; a} . Nous
remarquons que le support du noyau
associé ne dépend pas de h. Si a = 0, alors ?0,x = {x} et ?x?0,x
= N. Par contre, si a =6 0 nous avons
?x?N?a,x = {-a, . . . , - 1} ? N. (4.16)
Le fait que le support du noyau discret
triangulaire (4.16) a a =6 0 fixé contienne strictement N
induit un biais de bordure a gauche du support de f. Nous
y remédions en modifiant le bras a par a0 de sorte que,
?a0 nous avons
?x?N?a0,x = N.
4.2. NOYAU ASSOCIR DISCRET POUR DES DONNRES DE COMPTAGE 81
de 0, 1 ou 2), nous considerons le bras modifie a0 de a tel
que ?k ? N \ {0} donne et x ? N, nous avons
|
a0 = k ? a =
|
{
|
j si x = j ? {0,1, . . . ,k - 1}
k si x ? {k,k + 1, ...} .
|
Nous illustrons ce probleme du biais de bordure dans les
figures 4.9 et 4.10 Nous avons fixe h = 1, a = 4 et a0 = 4.
FIG. 4.9 -- ???str?t?? ?? ?\u9313‡A?? ?ss??(
r????????r? ??s ??????t?? ?? ?b?a
i=0
x=0 x=1
?
?
?
?
?
?
?
? ? ? ? ? ? ? ?
?
?

- 5 0 5 10
- 5 0 5 10
?
?
?
?
?
?
?
?
? ?
? ? ? ? ? ? ?
0.00 0.10 0.20

Probab(y)
0.00 0.10 0.20
x=2 x=4

?
?
?
?
?
?
? ? ?
? ? ? ? ? ?
- 5 0 5 10
?
?
?
?
?
? ? ? ?
?
? ? ? ? ?
- 5 0 5 10
Probab(y)
0.00 0.10 020
0.00 0.10 020
x=5 x=7

Probab(y)
0.00 0.10 0.20
?
? ? ? ? ? ?
?
?
?
?
?
?
?
? ? ?
0.00 0.10 0.20
?
? ? ? ? ? ? ? ?
?
?
?
?
?
?
?
- 5 0 5 10 -5 0 5 10
y y
Le biais de cet estimateur est
Biais { in(x)} = 2 P(a,h)
1 1 ( a(a + 1)h+1(2a + 1) 2
ctih+2) f(2)(x) + o(h).
3
D'apres (4.9), la variance est
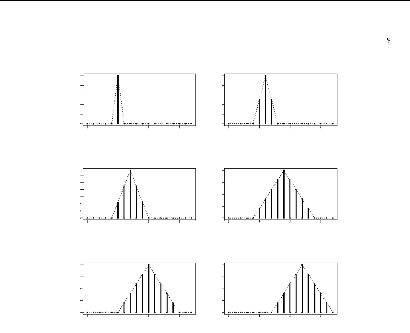
x=0
x=1
? ? ? ? ?
?? ? ? ? ? ? ? ? ? ? ?
FIG. 4.10 -- ???str?t?? ?? ?\u9313‡A?? ?ss??e
tr????????r? ???? ??????t?? ?? ?b?a
x=2
?
?
?
?
?
? ? ? ? ?
? ? ? ?? ? ? ?
- 5 0 5 10
x=4
?
?
?
?
?
?
?
? ? ? ?
?
? ? ? ? ?
- 5 0 5 10
0.00 0.10 0.20
x=5
?
?? ? ? ? ?
?
?
?
?
?
?
?
? ? ?
- 5 0 5 10
y
x=7
?
?
?
?
?
?
?
? ? ? ? ? ? ? ?
- 5 0 5 10
y
0.00 0.10 0.20
Probab(y)
0.00 0.15 0.30
0.00 0.10 0.20
Probab(y)
- 5 0 5 10
- 5 0 5 10
?
? ? ? ? ? ? ? ? ? ?
?
?? ? ? ?
0.0 0.2 0.4
Probab(y)
0.0 0.4 0.8
on P(a,h) = (2a + 1)(a + 1)h - 2 E;=0
jh.
En final, le MISE est la somme des deux derniers resultats.III
est egal
|
(a + 1)h E
MISE(n,h,f) =
nP(a,h) x?N
|
f(x)
|
a
+ v, { 1 1 ( a(a + 1)h+1(2a +
1) 2 E ih+2) f(2)(x) + o(h)
x?N
i=0 }2
2 P(a,h) 3
f. Remarques:
a. \u9670·?s r???rq??s q????
?\u9312‡@?st? ??s ??s ??s?rèt?s q?? ??
??????t ??a et? ?as??i?e à ?????
?\u9313‡A?? ??s?r?t ?t?????t ?? ?? ????r?? ??s?rrt?? ??
???e? ? ??u ??n??de?n ?? ?? ????r??
??s?ret? ???tre? ?? x ?t ?? ??r???r 2a ? ?? ?\u9313‡A?? ?ss??e
Ux,a ?e??? s?r ?x,a = {x,x #177; 1,... ,x #177;
a} s?é?r?t ???? s??t?
1
Ux,a(y) =
2a + 11x,x#177;1,...,x#177;a(y),
ù y ?st ???s N? \u9670·?s
???r????s q?? ??s ??r??etr?s
?r?r?s ?? ??tt? ?? s? tt????t ?i ????s????? ??s
?????rs ??t?er?s N? r ?? ??r??etr? ?? ??ss??? h ?st ???s
R*+ ?? q?? ???t
q?? ??s ?? ????s ??s ?re?r ???
s??st?t?t?? ?? ?????? ?? ??e ??a??èet?e?
4.2. NOYAU ASSOCIR DISCRET POUR DES DONNRES DE COMPTAGE 83
b. ?? ro?? ?? ??r??atr? ?? ??ss???
??s?r?t h > 0 r?st? s???????? ?? ??s ??t???? ??r ??
??r??t ?? t???r ???t? ??s ?s?r??t??s Xi q??
s?t ?r???s ?? ?? ????? x E N ?rsq?? h = h(n)
--> 0? ????????t ?? ??s??rs?? ????? ?? ?t
???t ???st???t?? x s? tr????t ??r
?????rt???? ?? ?\u9313‡A?? ?ss??( ??s?r?t Kx,h ???s??
???s?? ?? ???\u9312‡@ ???? t\u9313‡A?? ??
?\u9313‡A????s?r?t s?r???t? ??rs ??s ??str???t??s ?? Kx,h q??
s???t ???s ??s??rsé?s ??t?r ?? x E N ?t h >
0 ?\u9312‡@é?s?
c. P?r ??? ?? tr????????r? Ta,h,x? s? a = 0 ??rs
?? ?? ??s?ret? T0,h,x ?rr?s??? à ??? ?? ?? ??r?? D(x) ?? x?
\u9670·?s ????s ?? ?\u9313‡A?? ?ss??é ??s?r?t ?? ?? ??
??r????\u9313‡A?? ???i??? Dx,0? P?r t?t x E N ?t h >
0?
Dx,0(y) = äx(y), y E N.
d. \u9670·?s r???rq??s q?? ??
???q??a?? ????t?? ?? ?? ?é???i?? ????
?\u9313‡A?? ?as??i???es ??s ?(r??é?
???s ?? ??s ???? ?\u9313‡A?? ??s?r?t t????r? ??tel
q??que ? ?\u9313‡A??
??is?????? ??????? ?t ???????
?e??t?? ???t ??il, ??? ???r ???
???\u9312‡@?i?? ?d???i?? ??u ??e
\u9313‡A??e ???\u9313‡A???
4.2.5 Choix de fenetres
Nous présentons a ce niveau trois méthodes de choix
de fenêtres pour approcher a valeur idéale de la fenêtre h
définie par
|
hid = arg min
h>0
|
MISE(n,h,K,f) = hid(n,K,f). (4.17)
|
a. Minimisation des erreurs quadratiques
Du point de vue purement pratique on X =
(X1, . . . ,Xn) est un échantillon de variables
aléatoires de fonction de masse de probabilité f, associé
aussi a la distribution empirique f0 de f, nous proposons
maintenant quelques types de fenêtres
liées aux erreurs d'estimations. La premiere est déduite de
???rr??r q???r?t?q?? ??te?r(? (en
anglais " Integrated Squared Error")
définie par
|
ISE := E
x?N
|
{ :In(x) -- f(x) }2 = ISE(X; h,K,f), (4.18)
|
laquelle mesure sur un seul échantillon
X l'écart (au sens quadratique) entre
fb et f. Par
conséquent, la minimisation en h
de l'ISE (4.18) conduit a choisir une fenêtre
adéquate
|
h** = arg min
h>0
|
ISE(X;h,K,f) = h**(n,K,f). (4.19)
|
En remplacant f par f0 dans (4.19), nous utilisons
h**0 = h**(n,K,f0) pour le lissage
discret d'un f0 de f. Autrement dit, nous avons
|
h** 0= arg min h>0
|
ISE(X;h,K,f) = h**(n,K,f0). (4.20)
|
Basé sur la convergence de f0 vers f
quand n --> +00, nous avons immédiatement
|
lim
n?+8
|
h** 0(n,K,f0) = lim n?+8
|
h**(n,K,f), (4.21)
|
pour un type de noyau associé K
donné. L'importance de la fenetre adéquate h** (4.19)
de h est due, en partie, aux relations suivantes
|
MISE = E (ISE) = E
x??
|
MSE (x). (4.22)
|
b. Validation croisée
Toutcommelecascontinu,laméthodeclassiquedevalidationcroisée(enanglais"Cross
Validation") ne fait pas usage des approximations des
dérivées de f est toujours applicable dans le contexte
des estimateurs a noyau discret pour mieux estimer la valeur
idéale hid (4.17) de h.
Le principe de cette méthode est de minimiser par
rapport a h un estimateur de MISE pour trouver le paramètre optimal.
Pour cela la forme du MISE peut etre développé comme suit:
MISE = E {E R(x)} - 2E {Efn(x) f (x)}+ E f
(x)2.
x?N x?N x?N
Le terme Ex?N f(x)2 n'est pas
aléatoire, et ne dépend pas de h. Nous notons alors,
MISEcv = E E f--2n (x ) - 2E {
E (x) f (x)} = MISEcv(h),
x?N x?N
1.12n(x) qui est un estimateur
sans
le terme MISE qui dépend de h. Dans la suite,
nous déterminons un estimateur CV (h)
de MISEcv. D'abord, nous avons évidemment
x?N
biais de E {Ex?N f-12n(x)} .
Ensuite, soit
|
1
fn,-i(x) = n - 1E
jai
|
Kx,h (Xj)
|
Par construction,
1
i=1
1
i=1
KX%,h (Xj)
n(n - 1)
ij
est un estimateur de E {r x?N
bfn(x)f(x)} et on vérifie de
plus qu'il est sans biais En
effet, d'une part, comme les Xi sont i.i.d., nous avons

?
?
?
i=1
j1
= E
1
n(n - 1)
KX,,h (Xj)
?
?
?
= E
1E
n - 1 j1
K (Xj)
= E {KX,,h (X2)}
Finalement, nous venons de montrer que
|
CV (h) = E
xEN
|
b12n(x) - n2
|
Xn
i=1
|
b1n,-i (Xi)
|
( n 2
= E n E Kx,h (Xi) } 2- n(n - 1) E E KXi,h
(Xj).(4.23)
xEN i=1 i=1 j6=1
est un estimateur sans biais de MISEcv. Par
conséquent, la fen:etre optimale par la méthode de la
validation croisée s'obtient par
|
hcv = arg min
h>0
|
CV (h) (4.24)
|
on CV(h) est donné en (4.23). Pour
quelques détails, nous pouvons nous
référer a de nombreux auteurs tels Bowman (1984), Marron (1984)
Rudemo (1982) Stone (1984) et leurs références.
c. Exces de zeros
Pour cette section, le choix de la fen:etre repose sur une
particularité des données de comptage avec ? = N
qui n'est autre que l'exces des zéros dans
léchantillon X = (X1, . . . ,Xn). Pour ce
phénomene bien connu (voir, par exemple Kokonendji et al.,
2007, et leurs références) et étant donné un
noyau discret associé Kx,h, nous pouvons choisir
une fen:etre adaptée h0 = h0(X; K) de h satisfaisant
|
Xn
i=1
|
Pr (KXi,h0 = 0) = n0, (4.25)
|
on n0 désigne le nombre des zéros
dans X; voir Marsh & Mukhopadhyay
(1999) pour leur noyau du type poissonnien. Cette
fen:etre h0 ajuste le nombre de zéros
théorique au nombre de zéros observé.
L'équation (4.25) s'obtient a partir de
lexpression
|
E {in(x)} = E
yEN
|
Pr (Kx,h) 1(y),
|
dans laquelle nous prenons y = 0 et 1(0) = 1 afin
d'identifier le nombre de zéros théoriques au nombres
de zéros empiriques n0.
Dans le cas du noyau associé poissonien la
fen:etre adaptée h0 est connue explicitement. Tandis que dans
le cas des noyaux associés binomial et binomial
négatif, la fen:etre h0 est obtenue par la résolution
numérique dune équation non-linéaire
(voir Table 4.1)
4.3 Noyau associe discret multiple
TAB. 4.1 -- Solutions h0 pour les noyaux associes
discrets standards
Type de noyau h0
Poisson h0 = log (n1:0 Ein 1 eXi
Binomial (1--h0
= n0
Li=1 Xi+1
Binomial négatif Ein=1 (2XXi+i+1+1h0 =
n0
fonction de masse de probabilité f et inconnue defini sur
= N de dimension d. L'esti-
b
mateur fn de f noyau asocié discret
est
|
fn (x) = 1
n
|
Xn
i=1
|
Kx,H (Xi) , (4.26)
|
on la cible x =t (x1, . . . ,xd), H est la matrice
pleine inversible de variance-covariance desfenêtres hdedimension
d×d(présentéedanslasection2.2),et Xi =t
(Xi1, . . . ,Xid). La fonction Kx,H est le
noyau associé asymétrique sur
?x,h.
Dans le but d'avoir une forme plus
sympathique et qui ne dépend pas des
coefcients de corrélation,nousprésentonsl'estimateur
(4.26)quiutiliseleproduitdesnoyauxassociés
univariés. En efet, nous avons
|
fn (x) = 1
n
|
Xn
i=1
|
? ?
?
|
d
j=1
|
Kj xj,hj (Xij)
|
?
?
?
|
,
|
(4.27)
|
on xj est la jème composante du vecteur x,
hj est la jème fenêtre et Xij est la ième
observation de la jème composante. Le noyau
associé Kj est la fonction noyau associé
univarié décrite tout au long de cette partie.

Chapitre 5
Regression multiple a noyaux
associes mixtes
Nous rappelons que si nous avons un couple de
variables aléatoires réelles telles que Y soit
intégrable (E(Y ) < oo) alors la fonction
r(x) = E(Y |X = x)
est appelée fonction de régression de
Y sur X on nous n'avons aucune spécification sur r(x), avec x E R.
Supposons que nous disposons de n-échantillon (X1,Y1) , . . .
, (Xn,Yn) de variables aléatoires de même
loi que (X,Y ), de densité (fonction de masse) de
probabilité inconne. Nous nous proposons ainsi de construire un
estimateur brn de la fonction densité (de masse) inconnue. En
effet dans létude de la régression
non-paramétrique,
nousdistinguonsdeuxmodelesprincipauxlarégressionnon-paramétrique
effetsaléatoires et la régression
non-paramétrique a effets fixes. Dans le premier cas, les
observations Xi sont aléatoires, alors que dans le cas
deffets fixes les Xi sont i.i.d., fixé dans R (Xi = i/n) et
déterministes.
Soit ainsi le modele général
Yi = r(Xi) + ei pour i = 1, . . . ,n, (5.1)
on les ei sont i.i.d., non corrélés avec Xi, de
moyenne nulle et de variance ó2.
5.1 Estimateur de Nadaraya-Watson
Ilexisteplusieurstypesd'estimateursanoyaupourlarégressiondontleplusfameux
est celui de Nadaraya-Watson. Dans le cas univarié
lestimateur de Nadaray-Watson de la fonction
régression r est défini par
Eni=1 YiKx,h (Xi)
(5.2)
brn(x) = Eni=1 Kx,h (Xi) ,
CHAPITRE 5. REGRESSION MULTIPLE A NOYAUX ASSOCIRS 88 MIXTES
contrario,l'estimateur
br(x)estnul.NouspouvonsrepresenterlestimateurdeNadarayaWatson comme
une somme ponderee des Yi:
|
brn(x) =
|
Xn
i=1
|
wx,h(Xi)Yi pour x E fit, (5.3)
|
oU
Kx,h (Xi) (5.4)
wx,h (Xi) = En i=1
Kx,h (Xi)
est la fonction poid telle que Eni=1 wx,h (Xi) = 1,
par convention 0/0=0. La fonction Kx,h
estlafonctionnoyauassociepresenteedansleschapitresprecedents,definisur
Rx,h. Nous pouvons melanger plusieurs types de
noyau associe savoir lesles noyaux associes continus
symetriques ou asymetriques avec
les noyaux discrets standards. La fenêtre h = h(n,K) determine
le niveau de lissage de l'estimation
En se referant au quatrième chapitre de la
thèse (en preparation) de Senga Kiesse (2008), il est
convenable de donner l'estimateur de Nadaraya-Watson sous une forme
plus souple. Pour cela, soit
Nn(x; h)
rnx Dn(x; h) (5.5)
|
avec
|
1
Nn(x; h) = n
|
Xn
i=1
|
YiKx,h (Xi) ,
|
|
et
|
1
Dn(x; h) = n
|
Xn
i=1
|
Kx,h (Xi) = bfn(x).
|
Nous generalisons la definition (5.2) de cet
estimateur au cas multidimensionnel En effet, en utilisant (3.18) et (4.27),
l'estimateur de Ndaraya-Watson devient
brn(x) =
En Y {11p Kj
Y j=1 xi ,hi (Xij) }
(5.6)
En (Trp Kj i=1 11j=1 xi,hi on x
=t (x1i,. . . ,xpi) E ,Kjxi,hi
estlejèmenoyauassocieet Xij
estlaièmeobservation
de la jème composante.
??
Chapitre 6
Données de Panel à l etude
6.1 Notions élémentaires:
???é?s ?? P?????
Unpanelestunéchantillonstabledeconsommateursoudedistributeursinterrogérégulièrement
ou périodiquement et dont la composition ne se renouvelle
quelentement.Son étude permet une analyse
dynamique de la population considérée et la
prise en compte du contexte concurrentiel. Le panel de distributeurs permet la
collecte dinformations commerciales.
Il est ainsi possible de mesurer plus
précisément la nature du référencement dune
marque ou d'un produit en fonction du type de point de
vente ou encore de la zone
géographique. Le panel de consommateurs
procure quant a lui des informations marketing et
revêt un intérêt particulier pour l'analyse de
lévolution du comportement d'achat des consommateurs.
Un panéliste est donc l'individu ou le
ménage membre dun panel dont nous observons le comportement
et/ou les attitudes Selon la nature du panel, latransmission des données
par le panéliste peut se faire automatiquement et passivement
vers le système d'information de la société
d'étude ayant crée le panel
?? ??r??t??? ?r??s??t????? ??
??r??t???????t?????
Le marketing est traditionnellement orienté
vers lacquisition de clients et la réalisation de
transactions. Dans les années 90, de nombreux facteurs vont inciter les
entreprises a utiliser les nouvelles technologies avec notamment les
bases de données et les nouveaux canaux de communication
personnalisables et interactifs, pour développer des
programmes de fidélisation. Le marketing nest plus
simplementtransactionnel, il devient aussi relationnel.
Par conséquent le Marketing
relationnel, dont la vision a plus longterme devrait
permettrelafidélisationduconsommateur,souhaiteobteniretrenforcerla
fidélitéduclient, grâce a son consentement
volontaire, a une communication personnalisée et des o~res sur-mesure.
La fidélisation du client et les revenus futurs quil peut
ainsi générer sont mis en perspective dans une
optique financière et comptable Se développe
dès lors la notion de valeur a vie (lifetime value) qui
permet de définir la valeur a terme dun client tout le temps
qu'est maintenue sa relation avec lentreprise.
TAB. 6.1 -- ??????? ????r?t?? ??
??r??t??? tr??s??t????? ?tet ???t?????
Le marketing transactionnel favorise Le
marketing relationnel favorise
le produit la relation avec le client
l'acte d'achat la durée de la relation
le moment de la transaction l'individualisation
le montant de la transaction la fidélisation
V????r a ??? ?????t??? V????
Cette notion de valeur du client ou d'une clientele a
été développée initialement par les
spécialistes de la vente a distance Cest en effet dans ce secteur
que sont apparues les premieres bases de données clientele
permettant de tels calculs.
En marketing direct, la valeur a vie ou " Life time
Value " se définit comme étant la somme des profits
actualisés attendus sur la durée de vie dun client
Elaborée a partir de la durée de vie moyenne d'un
client et de lévolution théorique de sa consommation,
la life time value doit permettre de déterminer la limite haute du coit
dacquisition client. Elle peut etre surestimée par des
hypotheses trop optimistes en termes de fidée lité.
Par ailleurs, les différentes techniques et canaux de
recrutement utilisés infiuencent la valeur vie client. La
question qui se pose
P?r q??? ?\u9313‡A?? ??s ????s ?rr???r a
?????t?r ?? ?????r ??? ?????t?
L'objectifdanslapartiequisuitestdedonnerenpremierlieu,unrésuméstatistiquesur
les variables d'étude; ; nous étudions la contribution
et la corrélation des variables principales. En second lieu, nous
faisons appel aux estimateurs a noyaux associés discrets pour
représenter et prédire les actes d'achats effectué par
chaque panéliste. En guise d'avoir un
résultat lisible et explicatif nous nous sommes arretés aux 100
premiires observations.
6.2 Traitements preliminaires
P?r r?s???t a ???rt???? ?? ?? ??? ?? ??
?é?t???? s?a?is?i?? A ?? s?? t?st?????
?é?s?t??r? ?? ???é?s ???. ??i ?e???c?e ?e
?????a??n?? ??c?et ??rt?????èr?s a ?? s?r??
q??? ?\u9312‡@???i??? \u9670·?s
??a??n?is?n ???n? ???????? t????té ??s ???é?s
q?? ??s ?ssé??s ?tet ??u ?as?u?n
????\u9313‡A??a ?? ?o ????s??rs?
L'enquete sujet d'étude s'est
déroulée dune manière régulière
dans sept supermarchés différents que nous
désignons de manière anonyme :
magasin 1 magasin 2, magasin ,3,
magasin 4, magasin 5, magasin 6 et
magasin 7 Notre étude sest limité au
magasin 1 parce qu'il présente le plus
grand nombre de foyers clients. Afin davoir une idée
claire des comportements et des attitudes de consommations, nous avons
traité des variables quantitatives scalées
qui permettent par leur nature les calculs scientiiques lesles
plus souvent utilisées dans l'analyse multivariée Il
sagit donc dune étude quantitative qui
vise a comparer ou mettre en relief un certains nombre de comportements. Les
bases dont nous disposons sont les données brutes stockées par le
système de lentreprise responsable de la collecte de ces
données. Nous avons dfi effectuer des
agrégations etet des fusions pour aboutir enfin
une base exhaustive En effet cette partie est une étape essentielle
toute étude exploratoire : ces données sont le résultat de
lagrégation effectuée sur la base "Achats"
et "Foyers" qui sont stockées dans une base de
données sous SPSS. Cette base contient 46 variables
quantitatives et 4922 actes dachats. Les variables
présentées sont très pertinentes et définissent les
caractéristiques personnelles de chacun des panélistes
pour cet échantillon supposé etre représentatif dune
commune francaise de taille moyenne. Enfin, nous nous
restreignons sur un échantillon de 100 actes d'achats choisi
aléatoirement. Les variables principale sont
?\u9313‡A?r? L'identificateur du
panéliste.
??????ts? Le nombre des actes d'achats (passage en
caisse) répétés pendant la période des 26
premières semaines.
\u9670·???t???s????ts? Le nombre des actes
d'achat effectués pendant la deuxième période,
donnée par 26 semaines.
??rt?? Prend 1 si l'acte d'achat est fait pendant les
premières 26 semaines (période d'estimation) et prend 2 pour les
26 semaines restantes (période de validation)
??s?\u9314‡B?? La taille du ménage.
??P????? La catégorie
socio-professionnelle du chef de ménage
\u9670·r?????? Le revenu net du chef de
ménage.
???rt??r???? Le quartier habité par
le panéliste.
??r???s?r??t??? La durée d'observation.
Nous effectuons en premier lieu, une étude descriptive
unidimensionnelle qui nous précise les
caractéristiques principales de la distribution
sujet détude, elle nous ffurnit des renseignements
sur la forme de nos observations, et ce, numériquement au
biais de la comparaison des paramètres de la distribution Nous
commencons par présenter lele tableau (6.2) suivant
qui résume quelques aspects des achats
effectuésparlespanélistes.
Remarques: ? ??rt?r ?? ???? ???? ??s
??st?t?s q?? ?? ?\u9313‡A???? ?? ? ??r????? ???????ts ? ???s?
?? ? \u9670·???t???s????ts ? ????? r?s?? ?????
?stest fre ????é? ?? ??\u9312‡@?????
???\u9312‡@???? r?s?? ???? ?t r???t??????t ??st??t? ?? ?
?é????? ????? ?e?? ???? ??????s ?e?? a ?????r? q??
?tr? ??str???t?? ?stest ?ss?\u9314‡B ??i??ers?e ??u?u
?? ? ?\u9313‡A??????? ??r????? ?st r?s???t??????t
e??? a ?????? ?tet ????????? ?? ??? ?es ??fe???u
??e????? q?? ?st ???? ?ê?? ???er???r? a ??
?\u9313‡A????? ???s?? ? ??ist???u?? es l?ge????n
et??e? ??ry ?? ?r?t??
Nousvérifionsquecesdeuxvariablessontfortementcorrélées(avecuncoefcient0.971
TAB. 6.2 -- ?t?t?st?q?? ??s?r??t???s
???????t???,
|
ReAchats
|
N26etplusAchats
|
|
N
|
100
|
100
|
|
Minimun
|
0
|
0
|
|
Maximum
|
317
|
336
|
|
Moyenne
|
49.19
|
51.02
|
|
Médiane
|
18.5
|
10
|
|
Mode
|
0
|
0
|
|
Asymétrie
|
1.83
|
1.77
|
|
Variance
|
3727.29
|
4522.95
|
ceci parait tout a fait logique. Un
consommateur fréquent pendant la premiere période
reste évidemment fidéle pendant la seconde période A un
moment le comportement de consommation passé explique le
comportement de consommation a venir
6.2.1 Repartition des panelistes selon les variables
caracteristiques
a. Clients et lieu d'habitation
Nous essayons, a partir de la figure
(61) de voir la proportion des clients pour chacun des 13 quartiers.
Nous donnons un deuxieme graphique (62) qui
traduit les achats efectués par les consommateurs selon lemplacement de
leurs lieux dhabitations par rapport a la position du magasin 1.
Commentaires : \u9670·?s ????s
?????r?? a ??rt?r ?? ??s ???\u9312‡@
???r?s? q?? ??tt? ??res??t?t?? r??et?
?? ??e??s?t?? ??s ?????tt ?? ????a?? 1 ;
???\u9312‡@ ?? ? ?fre???n????n
??????t ??s ?? ?r???er?s s??????s ??t?????t ??
????ir? ????i????? a???i? ??ur ????at
???res ?? ?? s???r ??r??( ??r??t ??
???\u9312‡@?e?? ?er??? ?? ?? ??????s ???u
?\u9313‡A?n ???\u9313‡A ? ??? ??t?t? ???ss?
?? ?????r ?\u9313‡A??? ??s ?????tt ?t ???o?i??i????n
?e ????i??nt ?? q??rt??r ?? ? ?t ??? ???? ?st t?t a
???t ??ér??t ???sq??? re????t ???n ?e
??ar??er q?? ????r????t ?? ????s?? ? P?r
??tr?? ???\u9312‡@ q?? re????t
??\u9312‡@aux ??ar??er ??1,
??5, ??11 e ????ss??t ???rs ??t?s ????ts
??????t ?? ???\u9312‡@?è?? ?ér????
FIG. 6.1 -- ??s??rs?? ??s ?????ts s??? ?? ????
?????t?t??

FIG. 6.2 -- ?????s?t?? ??s ???é??st?s ??
????s?? ?

menclature suivante pour coder la variable "CSPchef"
1 = un agriculteur; 2 = un
cadre; ; 3 = un technicien;; 4 = un employe ;
5 = un ouvrier 7 = un chômeur.
Commentaires: \u9670·?s ?r(s??t?s ???s ??
tr?s?e?? ?r????q?? ??
é??rt?i?? ????t?e ??????ts s??? ??
??t(?r?? s????r??ss??????? ???i ?????
?????c?? ? ???u ?g??? es
???r?( a ?? ???ss? ??s ?? tr????????rs ?t ??s ???r?s? ???? ??ce
q??qui ?es ?v?????n ?nt(?e? s??t a
???r???r? ?st q?? ?? ???r? ??
??ss????????ss?????u ???é?es
r???is??a???\u9312‡@ q?? ??
tr????????t ??s? ??? ?? ???s ?r???
???r? ??s ??è??s ?t ??e ???-t????????ur????? ??s ??e?? a
?s?r ???(r??t?s q??st??s : ?????t
??\u9312‡@???i?? ??
??h??è?????t???s ??s ??A???rs q??
?r?t??t ??s ????s ?????ssociales ?tet
?d???n??n ??er ?????u ???n ??s ?r???ts
??????t??r?s? ?? ?r?rt?? ??????t?
??????t ? ????? ?é(???? ????
???st??? ??r q???
\u9670·?s ????s ???s?r d ???
?\u9312‡@?????t?? ??s?????? : ? ????i
????? q??st?? ?? ??s???????t(
????t??r ???s? ??s ??tt?e ?????ur
?n?p?a?i?????n?p???e?
??s ?????ts ??s ???s ?req???ts ?t les
?s ??r??rr?
FIG. 6.3 -- ??te?r??
s????r??ss??????? ??s ???é??st?s
?tet ??t?e ??????tt

c. Clients et revenu net
Nous avons utilisé la nomenclature suivante pour coder la
variable AGEchefr
1 = moins de 6500 FR; 2 = 6500 FR -- 8500 FR 3 =
8500 FR -- 12000 FR ; 4 = 12000 FR - 15000 FR; ; 5 = 15000 FR -
18000 FR ; 6 = 18000 FR -- 22000 FR ; 7 = 22000 FR - 25000 FR; 8 =
25000 FR - 30000 FR; 9 = plus que 30000 FR ; 10 = pas de
réponse. L'étude de l'évolution du nombre d'articles
achetés en fonction du revenu des
consommateursestunélémentdéterminantetfondamentalcanousreflételaqualitédesclients
qui font leurs achats dans le magasin 1 ensuite les
dépenses qui mettent par rapport a ce revenu. Dans la
figure 6.4, nous voyons la répartition de notre
échantillon
FIG. 6.4 -- ?????? ??t ??s ???é??st?s ??
????s?? ?

d. Clients et taille du foyer
Nous avons utilise la nomenclature suivante pour coder la
variable HHsize'
1 = une personne (femme); ; 2 = 2
personnes;; 3 = 3 personnes ; 4 = 4 personnes ; 5 = 5
personnes; 6 = 6 personnes; ; 7 = 7 personnes ; 8 = 8
personnes ; 9 = 9 personnes
La taille de la famille contribue a son tour dans laccroissement
du nombre dachats. Le graphique 6.6 met en evidence cette
nomenclature
FIG. 6.5 -- ?e??rt?t?? ??s ?????ts ??
????s?? ? ??? ?? ????? ?? ?\u9313‡A?r

FIG. 6.6 -- ?????? ?? ??????? ??s ???é??st?s
?? ????s?? ?

Commentaires: \u9670·?s ??st?t?s q??
??????t?? ??s ????ts ????t?ée ?es
??n??de????????t ???s ???t ??r ??s ???????s
a q??tr? ?tet s?\u9312‡@ ??r???s ?tet
???re?????u ?e ?é????e ??
???\u9312‡@? tr?s ?t ???q ??rs???s ???r ???
En conclusion, le comportement de consommation dépend de
deux grands élements
? En premier lieu, l'historique des actes dachats
effectués (s'il s'agit dun grand ou un petit
nombre) et son influence sur la consommation a venir
? En second lieu, la fréquence de consommation
dépend dun certain nombre de caratéristiques
personnelles.
6.3 Application
Dans cette partie, nous approprions l'estimateur a
noyau associé pour lestimation
desactesd'achatseffectuésparl'ensembledespanélistes.Eneffet,commenousavonsdes
donnéesdedénombrement,lecasdunoyauassociécontinuestautomatiquementéliminé.
Nous optons plutot pour le cas discret Or nous avons des variables
surdispersés la variance est beaucoup plus supérieure
que la moyenne) Nous utilisons alors approche
non-paramétrique pour estimer les actes dachats en faisant
appel aux estimateurs à noyaux associés
triangulaire et binomial
6.3.1 Dans le cas d'un estimateur a noyau associe
triangulaire
Nous donnons d'abord les graphiques 67
et 68 qui illustrent le comportement de consommation des
foyers pour la cohorte 1 et 2 En abscisses nous avons lesles
panélistes, et en ordonnées nous observons l'effectif de leurs
actes dachats. Nous remarquons que cet effectif est
différent d'un panéliste a un autre Il ny a pas un
comportement de consommation homogene. Nous donnons ainsi une
estimation des actes dachats pour la premiere et la deuxieme période
(chaque période est donnée par 26 semaines) Les
figures 6.9 et 6.10 mettent en évidence ce comportement
FIG. 6.7 -- ???rt????t ??s ????ts ??????????s
??????t ?? ?r???ir? t?????

Commentaire: ????res ??? ?t ????? ??s
r???rq??s q?? ??s ???s ???s???rr
?s?r??t??s ?? \u9314‡Ber? ???st ?? q?? ??s
??????s ??\u9312‡@?as ?? \u9314‡Bze?
????us????n??a ??\u9313‡A?? ?ss??e
tr????????r? ???rq?e ?? r??? ???s
???q?? ?r????q??? r???i
????\u9312‡@ ????
FIG. 6.8 -- ???rt????t ??s ????ts ??????t
?? ???\u9312‡@?è?? r?????

FIG. 6.9 -- ?st???t?? ??s ??t?s ??????ts ??r ??
?r???èr? ?ér???
Noyau Triangulaire h=0.1 et a=1

0 50 100 150 200 250 300
0.00 02 010 015
ESTIMATION
Actes d'achats
??tt? ??str???t?? \u9670·?s ??st?t?s q??
??ce ?\u9313‡A?? ?ss??i ???n ???p? ?? ??a??
?b?e???t?? ?t ?et??t? ??s ???t???\u9312‡@ ?t ??
??s??rs?? ??s ???é?s? ? ?es??? ?or??c????n ???str???t??
????r?q??? ?? ???s? ???? ??sles
?s?r??t??n ?t ?as?\u9314‡B ??i?pers?e a
?d?i????s ????s ?????r? q?? ??s ???e?s ??
????? ?t ??s ???é?s ??rr??é?e ???
??????i ????rs? ??t??? ?t ??r ??s
?st???r r???r??s????t? ?? ?stest
?rr?fr???? ?? ?p???d? ?e ???è??s
?????r??etr?q??s ???s ??s ???r?s ??? ?tet
???? ??s ???n ??g???? ?é?????? ??w
????\u9312‡@ ??r ?????st????t
6.3.2 Dans le cas d'un estimateur a noyau associe
binomial
Nous estimons a ce niveau les memes actes dachats parsemes en
utilisant un estii mateur a noyau associe binomial. Pour cela nous
donnons dabord les graphiques 6.13 et 6.13.
FIG. 6.10 -- ?st???t?? ??s ??t?s ??????ts ??r ??
???\u9312‡@?è?? ?ér???
Noyau Triangulaire h=0.1 et a=1

0 50 100 150 200 250 300
OR 02 010 015
ESTIMATION
Actes d'achats
FIG. 6.11 -- ?st???t?? ?? ?? ?r???er?
?er??? ??r?????

ESTIMATION
OM 02 at 0,15
Noyau Triangulaire h=0.1 et a=1

0 50 100 150
Actes d'achats
Commentaire: ????r???t ?? t\u9313‡A?? ??
?\u9313‡A?? ?ss??e? ??s r???r??s q???
\u9313‡Ay ?a ??e ??ss?s q??
????r??ss??t a ?????? ?t a ?r?t? ??s ?s?r??t??s (??l?s? ??
?\u9313‡A?? ?as??i ??????? s??tt?r?? d ?r???r? ??
???t? ?rt????t les ?s
???ée??t?e ?b?e??a??n? ?ê?? s? ??
?\u9313‡A?? ?ss??e ??????? ?st r????? ??r ?
??\u9312‡@?????it? ? ?? r?us?i ??a a
es???e ?rr??t????t ??s ???e?s ??rs??e?s?
FIG. 6.12 Estimation de la premiere période plus
agrandie
Noyau Triangulaire h=0.1 et a=1

0.00 005 010 015
ESTIMATION
0 10 20 30 40 50
Actes d'achats
FIG. 6.13 Estimation des actes d'achats pour la première
pérrode
Noyau Binomial h=0.1

0 50 100 150 200 250 300
0.00 02 at 0,15
ESTIMATION
Actes d'achats
FIG. 6.14 Estimation des actes d'achats pour a deuaième
période
Noyau Binomial h=0.1

0 50 100 150 200 250 300
OR 02 010 015
ESTIMATION
Actes d'achats
FIG. 6.15 Estimation des actes d'achats de a première
pérrode agrandie ((50 obserr vations)
Noyau Binomial h=0.1

0 50 100 150
0.00 005 010 015
ESTIMATION
Actes d'achats
FIG. 6.16 ?st???t?? ??s ??t?s ??????ts ?? ??
?r???èr? ?ér??? ???s
??r????? ???
?s?r??t??s?
Noyau Binomial h=0.1

0 10 20 30 40 50
0.00 005 010 015
ESTIMATION
Actes d'achats

Chapitre 7
Conclusions et perspectives
7.1 Conclusions
Ce rapport a permis de couvrir une étendue assez
large du domaine de lestimation non-paramétrique
d'une densité (fonction de masse) de probabilité inconnue f
basée sur la technique des noyaux associés
Nous avons vulgariséles travauxdes pionniers de ce domaine,
et aussi unifié la définition d'un noyau
associé dans chacun des cas continu et discret. Nous avons pu ainsi
donner lestimateur et calculer ses propriétés.Les illustrations
faites simplifient la compréhension de cette méthode Lapplication
de cette approche sur les données parsemées met en
évidence que le noyau associé
triangulaire est performant. Enfin, la méthode d'estimation
non-paramétrique par noyaux associés permet
d'avoir de bons résultats si nous choisissons
adéquatement les paramètres mis en jeu.
7.2 Perspectives
Les travaux présentés dans ce document offrent de
nombreuses perspectives.
Sur un plan théorique, nous aurions
aimé nous attarder sur lestimateur a noyau associé
multiple et nous intéresser a ses propriétés
fondamentales. Nous aurions aussi aimé appliquer ces
noyaux associés sur des données de panel dans un cadre
de régression. C'est a dire que sur ces
données parsemées nous attribuons un mélange de
noyaux discrets et continus afin d'améliorer la
qualité destimation.
Il sera également intéressant de
penser a une combinaison entre les noyaux associés continus
et les noyaux associés discrets
Quelques travaux dans cette direction vont d'ailleurs
être entrepris.
104 CHAPITRE 7. CONCLUSIONS ET PERSPECTIVES

Chapitre 8
Annexe 1 : commandes sous le
logiciel R
Progamme des simulations de l'estimateur a
noyau continu symétrique
Nous avons utilisé le code suivant pour la méthode
de Plug-in
density.default(x=x,bw= nrd0Ukernel=
epanechnikov"n=100) on la commande ' bw= 'nrd0' permet de choisir la
fenêtre delissage. Nous avons utilisé le code suivant
pour la méthode de Validation croisée
density.default(x=x,bw= ucvU,kernel=
epanechnikov"n=100) on la commande ' bw= 'ucv' permet de choisir la
fenêtre delissage.
Nous avons crée nos propres codes pour présenter
les graphiques des di~érents types de
noyaux .
En particulier, nous avons eu recours aux fonctions
dgamma" et dbeta" qui existent
déjà sousR. Pour La loiinverse
gaussienne(IIG)et
réciproqueinversegaussienneRIIG), nous les avons
programmmé puisque le code nexiste pas.
dinvgauss <- function(x, mu = stop(Uno shape
argU) lambda = 1
{if(any(mu<=0)) stop('mu must be
positiveU)
if(any(lambda<=0)) stop( lambda must be
positive")
d <-
ifelse(x>0,sqrt(lambda/(2*pi*x3))*exp(-lambda*(x --
mu)2/(2*mu2*x)),0) if(!is.null(Names <- names(x)))
names(d) <- rep(Names, length =
length(d))
}dpinvgauss <- function(q, mu
= stop(!no shape arg!) lambda = 1)
{if(any(mu<=0)) stop(!?mu must be
positive!)
if(any(lambda<=0)) stop( lambda must be
positive")
n <- length(q)
if(length(mu)>1 &&
length(mu)!=n) mu <- rep(mulength=n)
if(length(lambda)>1 &&
length(lambda)!=n) lambda <- rep(lambda,length=n)
lq <- sqrt(lambda/q)
qm <- q/mu
p <-
ifelse(q>O,pnorm(lq*(qm-1))+exp(2*lambda/mu)*pnorm(-lq*(qm+1))O)
if(!is.null(Names <- names(q)))
names(p) <- rep(Names, length =
length(p))
}prinvgauss <- function(n, mu = stop("no
shape arg") lambda = 1)
{if(any(mu<=O)) stop(Umu must be
positiveU)
if(any(lambda<=O)) stop( lambda must be
positive")
if(length(n)>1) n <- length(n)
if(length(mu)>1 &&
length(mu)!=n) mu <- rep(mulength=n)
if(length(lambda)>1 &&
length(lambda)!=n) lambda <- rep(lambda,length=n)
y2 <- rchisq(n,1)
u <- runif(n)
r1 <- mu/(2*lambda) * (2*lambda + mu*y2 -
sqrt(4*lambda*mu*y2 + mu2*y22))
r2 <- mu2/r1
ifelse(u < mu/(mu+r1), r1, r2)
}
Nous avons crée nos propres codes pour
appliquerles estimateurs auxdonnéesdepanel.
Progamme de l'estimateur a noyau associé discret
triangulaire
Description: Lissage d'une distribution de
probabilité discrète par un estimateur a noyau
associé discret triangulaire
Arguments:
x: vecteur des points
h: paramètre de lissage
a: bras (paramètre)
V: vecteur des observations de l'échantillon
N: effectifs des observations
n=sum(N): nombre total d'observations = taille de
léchantillon
Usage:
trng=function(x,h,V,N,n,a)
trng=edit(trng,editor= nedit ?)
Y=trng(x,h,V,N,n,a)
Détails: La loi de probabilité discrète
triangulaire dordre h, de bras a et de centre x se définit
par
Pr(z)= ((a+1)bh - (abs(z-x))bh)/A,
avec z = x#177;1,x#177;2,...,x#177;a, et on
A=(2*a+1)*(a+1)bh-2*sum(kbh), k=1,2,..., a est la constante de
normalisation.
Code de l'estimateur a noyau associé discret
triangulaire

function(x,a,V,N,n,h) {y=0
s=rep(0,length(x))
n=sum(N) # Taille de l'échantillon
f0=c(N/n,rep(0,length(x)-length(N))) #
Estimateur fréquence
u=0;
m=0;
for (k in 1:a)
{ m=kbh
u=u+m
}
A=(2*a+1)*(a+1)bh-2*u # Constante de normalisation P(a,h)
for (i in 1:length(x))
{for (j in 1:length(N))
{if (V[jI=(x[iI-a) V[jI=(x[iI+a)) # Support
{x #177; 1,... ,x #177; a}
{K=((a+1)bh - (ahs(V[jI-x[iI))bh)/A # Noyau
associé
y=(N[j]/n)*K # Estimation a
noyau associé discret triangulaire
} else{
y=0
} s[iI=s[iI+y
} } fn=s/sum(s) # Estimations bIn
E=sum(s) # Constante de normalisation C
E[21=sum((f0-fn) b2) # ISE0
Progamme de l'estimateur a noyau
associé discret binomial
Description: Lissage d'une distribution de
probabilité discrète par un estimateur a noyau
associé discret binomial.
Arguments:
x: vecteur des points
h: paramètre de lissage
V: vecteur des observations de l'échantillon
N: effectifs des observations
n=sum(N): nombre total d'observations = taille de
léchantillon
Usage:
binom=function(x,h,V,N,n)
binom=edit(binom,editor= neditU)
Yb=binom(x,h,V,N,n)
Détails: La loi de probabilité binomiale de
paramètres p et n se définit par
Pr(z)= choose(n,z)*(p)bz*(1-p)b(n-z),
z = 0,1,..., n. Le noyau associé discret se
construit avec p=(x+h)/(x+1) et n=x+1. Code de l'estimateur a noyau
associé discret binomial
function(x,V,N,n,h)
{ y=0 s=rep(0,length(x))
n=sum(N) # Taille de l'échantillon
f0=c(N/n,rep(0,length(x)-length(N))) #
Estimateur fréquence
for (i in 1:length(x))
{for (j in 1:length(N))
{if(V[j]<=x[i]+1) # Support {0,1,. . . ,x + 1}
{ K=
choose(x[i1+1,V[j1)*((x[i1+h)/(x[i1+1))b(V[j1)
*((1-h)/(x[i1+1))b(x[i1+1-V[j1)) # noyau
associé
y=(N[j]/n)*K # Estimation a
noyau associé discret binomial
}
s[iI=s[iI+y
} }
fn=s/sum(s) # Estimations bIn
E=sum(s) # Constante de normalisation C
E[2I=sum((f0-fn)b2) # ISE0
Bibliographie
[1]AITCHIsON, J. & AITKEN, C.G.G. (1976). Multivariate
binary discrimination by the kernel method. Biometrika
63, 413-420.
[2]CHAUBEY, Y.P., SEN A. & SEN P.K. (2007). A New Smooth
Density Estimator For Non-Negative Random Variables
Technical Report No 01/07. Concordia University. Montréal.
[3]CHEN, S.X. (1999). Beta Kernels estimators for
density functions. Computational Statistics and Data
Analysis 31, 131-145.
[4]CHEN, S.X. (2000). Gamma Kernels estimators for
density functions. Annals of the Institute of
Statistical Mathematics 52, 471-480.
[5]DUONG, T. (2004). Bandwidth selectors for
multivariate kernel density estimation,
thesisforthedegreeofDoctorofphilosophyattheUniversityofWesternAustralia.
School of Mathematics and Statistics.
[6]FELLER,W.(1966).AnIntroductiontoProbabilityandItsApplications.JohnWiley
and Sons, New York.
[7]HALL,P.(1981).Onnonparametricmultivariatebinarydiscrimination
Biometrika 68, 287-294.
[8]HALL, P., RACINE, J.S. & LI, Q. (2004).
Cross validation and the estimation of conditional probability
densities. Journal of the American Statistical Association 99,
1015-1026.
[9]HILLE, E. (1948). Functional Analysis and
Semigroups. American Mathematical Society
Colloquium, New York.
[10]SENGA KIEssE, T. (2008). Approche
non-parametrique des donnees de denombrement, these en
préparation pour obtenir le grade dun Docteur
dUniversité de Pau et des Pays de l'Adour.
[11]KOKONENDJI, C.C., SENGA KIEssE, T. & ZOCCHI, S.S.
(2007). Discrete triangular distributions and non-parametric
estimation for probability massfunction. Journal of
Nonparametric Statistics 19, 241-254.
[12]LI, Q. & RACINE, J.S. (2007). Nonparametric
Econometrics: Theory and Practice. Princeton University
Press, New York
[13]MICHELs, P. (1992). Assymetric Kernels Functions
in Non-Parametric Regression Ananlysis and Prediction.
The Statistician 41, 439-454.
[14]SCAILLET,O.(2004).DensityestimationusinginverseandreciprocalinverseGaussian
kernels. Journal of Nonparametric Statistics 16, 217-226.
[15]SEsHADRI, V. (1993). The Inverse Gaussian Distribution: A
Case Study n Exponential Families. Oxford University
Press New York.
[16]SIMONOFF, J.S. (1996). Smoothing Methods in
Statistics. Springer, New York. [17]TSYBAKOV, A.B. (2004).
Introduction a l'Estimation Non Parametrique. Springer,
Paris.
[18]WAND, M.P. & JONES, M.C. (1995). Kernel
Smoothing. Chapman and Hall, London.
| 

