Conclusion Générale
Les noyaux temps réel permettent aux applications temps
réel d'être développées et étudiées
facillement.L'utilisation d'un noyau TR simplifie le processus de conception en
divisant le code de l'application en taches séparées .il nous
permet une meilleure utilisation des ressources d'un système en nous
fournissant des services des grandes valeur tel que la gestion du temps .( time
délais, périodicité , la gestion des ressources : la
communication la synchronisation , l'exclusion mutuelle , boite aux lettres
etc.
Durant les dernières décennies, on a vu la
prévalence des microcontrôleurs et surtout celle de la famille des
pic xxx .Cependant un système embarqué est une combinaison de
hardware et de software .Nous trouvons sur la marché tous les types de
hardware (CAN, USB, RS232, TCP/IP )intégrées dans des
microcontrôleurs . Quoique tous les outils de programmation classiques
avec leur environnement de développement intégré (IDE) Ce
qui est manquant était le noyau temps réel pour cette famille de
microcontrôleurs qui est le PIC xxx, qui ont été
comblé durant les 2 ou 3 dernières décennies.
On peut dire maintenant, que nous disposons de tous les calculs
adéquats pour accélérer la conception d'une application
temps réel , appelé un système embarqué.
Nous travail a consisté en la mise en oeuvre d'un noyau
temps réel (picos18 ) de la société pragmatec aux norme
OSEK/VDX basé sur pic18f452 , nous avons exploité la
majorité des services offerts par ce noyau , d'autres services
définit par la norme OSEK n'ont pas encor être
développé pour ce noyau .
Ce travail nous a permis de nous familiariser avec le domaine du
temps réel et à approfondir nos connaissances de la programmation
en langage C pour les PIC.
Nous tenons à signaler que les problèmes
rencontrés dans le développement des application temps
réel sont très différente de celle de la programmation
mono tache .
Un défaut de synchronisation peut bloquer toute
l'application et il n'ya aucun moyen de déblocage d'où l'exigence
des ateliers de genre logiciel pour le temps réel.
Annexe
ANNEXE
Pour effectuer une mesure de température, il faut donc,
dans un premier temps, convertir la température en tension et ensuite
dans un deuxième temps, convertir cette tension en valeur
numérique. Le schéma synoptique de la figure représente
ces deux étapes de conversion [10].

Schéma synoptique de la conversion analogique
/numérique 1- conversion température -tension analogique
:
La conversion de la température en tension analogique
s'effectue grâce à un capteur de température. ces capteurs
se distinguent selon la gamme des températures où ils peuvent
travailler et aussi selon la vitesse de réaction aux variations de
température. Dans cette expérience, nous avons utilisé le
capteur LM 335. Le LM335 permet de mesurer des températures comprises
entre - 40°C et +100°C.
Comme montre la figure, il est encapsulé dans les
mêmes types de boîtiers que les transistors.
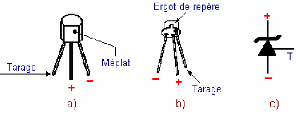
Brochage du LM335 et son symbole graphique
Le circuit d'utilisation du LM335 est comme suite :
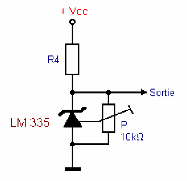

Circuit d'utilisation du LM335
A 25° C et avec un courant de 1 mA circulant dans le capteur
(LM 335), la valeur typique de la tension est de 2,98 volts. La valeur minimum
est de 2,92 volts et la valeur maximum est de 3,04 volts.
La valeur de la résistance R4 doit être
calculée en fonction de + Vcc pour que le capteur soit parcouru par un
courant de 1 mA.
Calcul de R4 :
R4 = (Vcc - 2,98) / 1 mA
Pour Vcc = + 5 volts, R4 = (5 - 2,98) / 10-3 = 2,02 k ohm
On prend R4 = 2,2 k qui est une valeur normalisée proche
de celle calculée.
La tension en sortie est proportionnelle à la
température. Elle augmente de 10 mV par degré Celsius
supplémentaire.
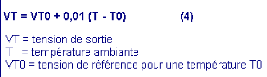
La relation entre la tension et la température est
donnée par la formule suivante :
VT est la tension de sortie, T la température ambiante,
VT0 est la tension de référence pour une température
T0.
Pour T0 = 25°C et VT0 = 2,98 volts, on obtient :
Pour améliorer la précision de la mesure, on
peut effectuer l'étalonnage du capteur à l'aide d'un
thermomètre de précision. Avec ce dernier, on mesure la
température et on reporte la valeur trouvée dans la formule (5),
ce qui permet de calculer VT.
Il ne reste plus qu'à régler la tension de sortie
à la valeur calculée. Pour cela, il faut utiliser un
voltmètre de
précision et agir sur le potentiomètre P de 10 k
ohm (10)
B- conversion analogique - numérique :
Pour la conversion A/D on a utilisé le convertisseur A/D
du pic18f452
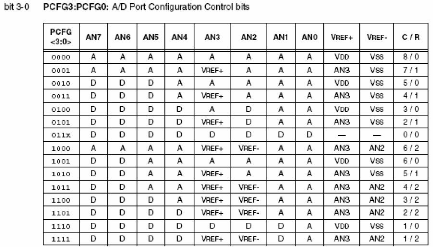
Configuration du CAN :[11]
- Configurer les pins analogiques et les tensions de
référence : ADCON1 :

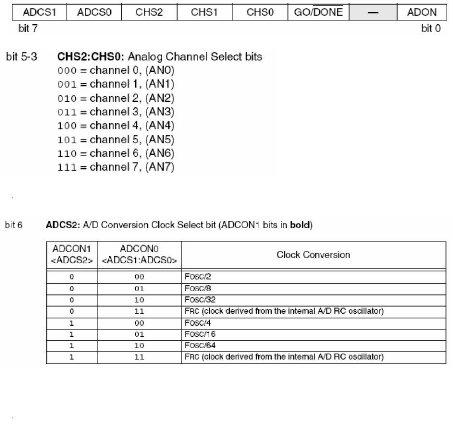
- Déterminer l'horloge du convertisseur
:
- Configure l'interruption du CAN :
- ADIF bit = 0
72
- Choix du canal d'entrer analogique du convertisseur:
ADCON0 :
- ADIE bit = 1 (permet l'interruption)
- GIE bit = 1 (permet les interruptions globales)
- PEIE bit = 1 (permet les interruptions
périphériques)
- démarrer la conversion :
GO/DONE bit (ADCON0) = 1
- Attendre la fin de la conversion :
ADIF < PIR1 > = 1 la
conversion est terminé
ADIF < PIR1 > = 0 la
conversion n'est pas encore terminé
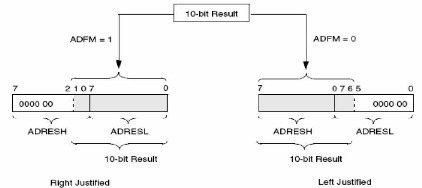
- Lecture du résultat de la conversion (dans
ADRESL OU ADRESH) :
| 

