111.3- Calcul de l'angle ès des transformations
Pour obtenir l'orientation choisie, il faut calculer la
pulsation statorique ùs à intégrer
pour obtenir l'angle ès nécessaire aux
transformations de coordonnées.
On obtient donc à partir du calcul
précédent (1.22), l'angle de transformation :
= Jùsdt =J(
sq +1Ù )dt
ô r ørd
ès
(1.22)
On peut ainsi à partir de la mesure de la vitesse
(angulaire) mécanique, estimer la pulsation statorique et par
conséquent l'angle des transformations.
Le couple électromagnétique devient avec
ø r = MImr :
M 2
M ( ) ( mr sq ) ( ) s [
mr sq ]
I = p I I p 1 L I I
ø = - ó
sq rd
Lr
C em= p
Lr
(1.23)
Le courant magnétisent Imr
étant à la constante de temps rotorique près, l'image du
courant Isd . Le courant Isd permettra
de fixer le flux ør et le courant
Isq servira à piloter le
couple électromagnétique.
Un schéma de principe d'une commande vectorielle
indirecte à flux orienté, intégrant les
différents blocs de calcul des lois est le suivant :
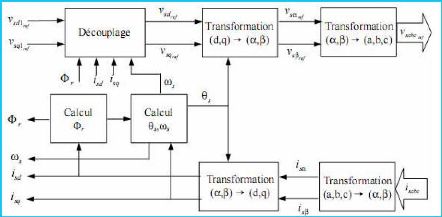
Figure 1-5 : Schéma de principe d'une
comman de vectorielle in directe a orientation de flux [12]
111.4- Choix du mode d'alimentation
Pour ce type de commande, l'alimentation de la machine est faite
par un onduleur de courant ou de tension selon les besoins.
· Alimentation en courant Pour une
alimentation en courant, les variables de commande sont
Isd et Isq . Mais la
source de courant est lourde et chère à cause
des inductances de lissage. Ce mode d'alimentation est beaucoup plus
réservé aux applications de très fortes puissances
où la forme du courant est particulièrement prise en compte (pour
réduire les ondulations de couple).
· Alimentation en tension Dans ce cas, les
variables de commande sont Vsd et Vsq .
Les onduleurs de tension qui
ne nécessitent pas d'inductance lourde et
coûteuse indispensable pour réaliser une source de courant, sont
beaucoup préférés et utilisés en traction
électrique (TGV transmanche, voiture électrique,...)
[5].
Nous choisissons donc pour la machine une alimentation en
tension et contrôlée en courant. De tous les modèles
courants, nous choisissons le modèle ayant pour:
- variables d'état : Isd ,
Isq , ørd et
ørq .
- variables de commande : Vsd et
Vsq .
Ce modèle qui est utilisé pour orienter le flux
rotorique ør [5] est celui
décrit par le système d'équations d'état (1.15)
précédent.
111.5- Synthese du modele final
En injectant les expressions de l'orientation du flux rotorique
(ø rd = ø r et ørq =
0 ) dans les équations des tensions (1.14), on obtient :

RrIrq
0
dø
r
MIrdd
Isd
I MI
+
sq rq
Lr
I rd
MIsdd
Lr
Irq q+#177;MIsqq
Vsd
Vsq
Rs
0
Isd
Rr
ù
ù
s sq
ø
øsd
øsq
ør
0
RsIsq
s sd
ø
~
~
L
+
dø
sd
dø
sq
+ +
dt
+
dt
+
ù
r ør
~
~~
L
dt
I rd
avec
Ls
Ls
(1.24)
Et le couple électromagnétique : ( sq rd
)
C = p I ø
em L r
M
(1.25)
Le flux rotorique peutêtree obtenu par la relation
:ø rr = MImr . (1.26)On
définit ainsi le courant magnétisant I mr,== et on
obtient de la troisième équation duu
(1.22), combinée à celle des flux :
d
ø M 1 dI 1 - 1
rd mr
= I ø
sd - =
r ? I I
sd
dt
mr
ô r ôr
dt ô ô
devient : pI mr ô r = I sd -
I mr .
1
Ce qui donne : sd
I = I
mr 1
+ pôr
r r

(1.27)
Relation montrant que les deux
grandeursImr.
et Isd sontégales,, enrégimee
permanent.
Apres combinaison deséquationss du (1.22),
leséquationss des tensions statoriquesen n d et
qs'écriventt :

Rs
Isd
+
dø/
dtt
MM
rr
+
Lrr
MLr) 2 dI sd M
ù s- Lr
)I
sq
~ -M2
~
~ ~
~ L r ~
Rs
I sq + Ls
(1.28)
~
~~ ~ ~ ~
Vsd
Vsq
L
+
MM
Lrr
~ -M 2 ~
~ L I ~
s sd
~ L r ~
:
dt
+ ùs
dIsq
1
dans les
Dans le domaine de Laplace, en remplaçanø
rr = MImrr , ave sd
I = I
1
1
mr d++pôr,
équations ci-dessus, on obtient :

2
M
M2
+L s - M Isd
-ùL s - ML:1I
Lrsq
~ -M 2 ~
~ L I ~
s sd
~ L r ~
:
~
~~ ~ ~ ~
Vsd
Isd
Rs
L
RsIsq
Vsq
22
MM
pImrr
22
(1.29)
MM
mrr
LL
Lrr
Lr
)pI
sq
~ ~
~
+
Ls
+ ùs
On peut constateràa partir de ceséquationss que
lesystèmee des deux axes est fortementcouplée :
chacune des composantes (entrées)Vsdd et
Vsq de la tension influenceàa la fois
les
courants (sorties) Isd etIsqq .
Pour contourner ceproblèmee et pouvoircontrôlerr le flux
. Expression qui, dans le domaine de Laplace
indépendamment du couple, nous allons transformer ce
système multi variable (deux entrées et deux sorties
couplées) en deux systèmes mono variables (une entrée, une
sortie).
| 

