Analyse du comportement de la servovalve electro-hydraulique lors de freinage des roues d'un avion (cas de Boeing 737-NG)( Télécharger le fichier original )par Charly MENGAWAKU JEAN Institut supérieur de techniques appliquées - Ingénieur technicien en mécanique 2010 |

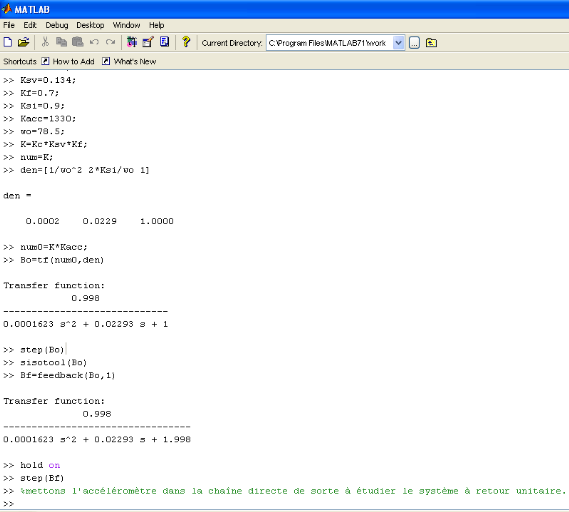
IV.6.2.2. Programmation du système en Boucle Fermée non compensée
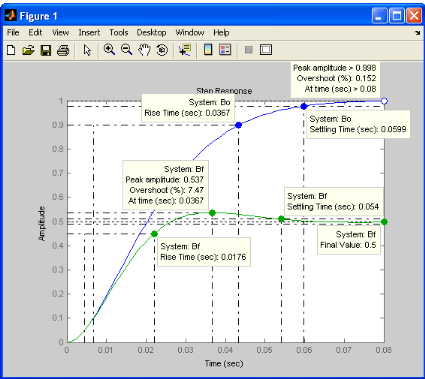
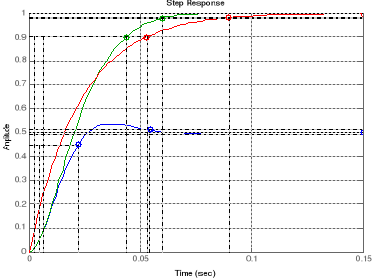
Commentaire Bleu : Boucle ouverte Vert : boucle fermée non compensée avec l'accéléromètre sur la chaine directe de façon à étudier un système à retour unitaire. D'où l'écart est de 1-0.5 = 0.5 soit 50 % d'imprécision, il nous faut obligatoirement un système correcteur. IV.6.2.3. Choix du correcteurLe correcteur a été choisi selon la théorie de compensation pôle-zéro ; qui consiste à créer des pôles et des zéros du correcteur qui se simplifient avec ceux du système à corriger.(19(*)) L'objectif de ce point est de présenter une première technique de synthèse des régulateurs PI, PD et PID, une méthode permettant de calculer les paramètres Kp, Ti et Td selon le type de régulateur choisi. On se restreindra à la présentation de la méthode de synthèse dite de compensation pôle-zéro. La technique de la compensation pôle-zéro consiste à placer un zéro du régulateur Gc(s) situé au même endroit qu'un des pôles du système à régler.
La fonction de transfert du système en boucle ouverte avec MATLAB sera : Programmation >> num=0.998; >> den=[0.0001623 0.02293 1]; >> Bo=tf(num,den)
Transfer function: 0.998 ----------------------------- 0.0001623 s^2 + 0.02293 s + 1
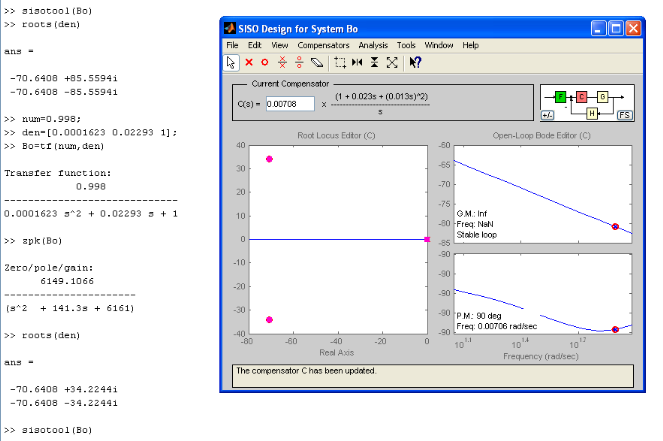
>> zpk(Bo)
Zero/pole/gain: 6149.1066 ---------------------- (s^2 + 141.3s + 6161)
>> roots(den) ans = -70.6408 +34.2244i -70.6408 -34.2244i Choix du correcteur selon la compensation pôle zéro (ça se fait toujours en boucle ouverte) Transfer function: 0.998 ----------------------------- 0.0001623 s^2 + 0.02293 s + 1 >> sys1=Bo; Le compensateur est dimensionné en se basant sur la fonction ci-haut. Et on écrira : 0.0001623 s^2 + 0.02293 s + 1 0.002293s Par Matlab il on tapera : >> num1=[0.0001623 0.02293 1]; >> den1=[0.02293 0]; >> sys2=tf(num1,den1)
Transfer function Corrector G(s): 0.0001623 s^2 + 0.02293 s + 1 ----------------------------- 0.02293 s En multipliant le bloc correcteur et celui du système à régler, on aura par Matlab : >> sys=sys1*sys2
Transfer function: 0.000162 s^2 + 0.02288 s + 0.998 ------------------------------------------ 3.722e-006 s^3 + 0.0005258 s^2 + 0.02293 s
Et en boucle fermée Matlab donnera:
>> sys3=feedback(sys,1)
Transfer function: 0.000162 s^2 + 0.02288 s + 0.998 -------------------------------------------------- 3.722e-006 s^3 + 0.0006878 s^2 + 0.04581 s + 0.998
Un système du troisième ordre et de degré relatif 3-2=1. D'où vient que le système se comportera comme celui du premier ordre n'ayant naturellement pas de dépassement.
. * 19 Note des cours, Régulation automatique, (MI : M173-REG GE : REGHaute), Ecole d'Ingénierie et de Gestion du Canton de Vaud, Suisse, mars 2007, p.161-167. |
|