2.3. Modèle d'état d'un système
2.3.1. Variables
d'état
Qualitativement, l'état d'un système se
réfère au comportement initial, courant et futur d'un
système.
Quantitativement, il est défini par un ensemble minimum
des variables notées X1(t0),
X2(t1), ..., Xn(tn) qui sont
spécifiées à l'instant t = ti et qui, ensemble
avec les entrées données U1(t1),
U2(t2), ...,Un(tn) pour t=0
déterminent l'état pour n'importe quel instant futur t >
t0.
Les variables appelées variables d'état,
Xi(t) définit un ensemble minimum des variables qui
déterminent l'état d'un système ; ils sont des
informations minimales pour pouvoir décrire les comportements futurs.
L'ensemble de ces variables constituent les composantes d'un vecteur
appelé vecteur d'état du système.
Ainsi le vecteur d'état est un vecteur qui
décrit le comportement dynamique du système en termes de n
variables.
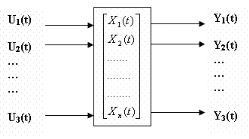
Figure I.2. Vecteur
d'état d'un système dynamique
2.3.2. Modèle d'état d'un
système
Etant donné que la dynamique d'un système est
complètement définit pour vecteur d'état. Ce
système peut être alors modélisé par le
modèle d'état dont les équations sont données
par :
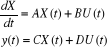
Où :
U(t) : Vecteur d'entrée ou vecteur de commande
Y(t) : la sortie réglée du
système
A : matrice dynamique du système
B : matrice de commande du système
C : matrice d'observation
D : matrice de liaison directe
Généralement, il n'y a pas liaison directe entre
la variable de commande et la sortie réglée et le modèle
se réduit à :
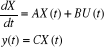
Figure I.3. Diagramme en bloc de la modélisation
d'Etat d'un système ).
2.3.3.
Contrôlabilité et Observabilité
2.3.3.1.
Contrôlabilité
Les problématiques générales de
l'automatisme consistent à commander et à contrôler un
système de manière à ce qu'il évolue depuis un
état initial vers un état final déterminé.
En représentation d'état, il s'agira de
déterminer le signal de commande U(t) entre deux états
donnés t1 et t2 pour ramener le système de
l'état X(t1) vers un état X(t2).
Critère de Kalman
Un système est complètement accessible,
commandable ou contrôlable si et seulement si les vecteurs  sont linéairement indépendants ou si la matrice de
commande Q définit par sont linéairement indépendants ou si la matrice de
commande Q définit par  est de rang n. est de rang n.
2.3.3.2.
Observabilité.
Des nombreuses méthodes de commande de processus
utilisent le principe de retour d'état. Comme dans la plus part des cas,
les seules grandeurs accessibles du système sont les variables
d'entrée et de sortie.
Il est nécessaire, à partir des ces informations
de construire l'état du modèle choisi pour élaborer la
commande. Un reconstructeur d'état ou estimateur est un système
ayant comme entrées, les entrées et sorties du système
réel et dont la sortie est une estimation de l'état de ce
système.
En plus, certaines variables d'état sont très
faciles à mesurer et les autres sont non mesurables. Les variables non
mesurables peuvent, comme celles mesurables influencer la sortie y(t) du
système. Il est donc possible à partir de la mesure de la sortie
de déduire les grandeurs considérées.
Un système est donc observable à un instant
t1 si la connaissance du signal d'entrée et du signal de
sortie sur un intervalle de temps [t1, t2] permet de
calculer l'état du système à l'instant t1.
a) Critère
d'observabilité
Un système est complètement observable si et
seulement si les vecteurs lignes  où n est l'ordre de la matrice A, sont linéairement
indépendants, ou si la matrice colonne d'observabilité N est de
rang n. où n est l'ordre de la matrice A, sont linéairement
indépendants, ou si la matrice colonne d'observabilité N est de
rang n.
b) Reconstructeur d'état
Sous l'hypothèse de linéarité du
modèle du processus, la structure de base de l'estimateur est toujours
la même, mais sa réalisation dépendra du contexte
choisit : continu ou discret, déterministe ou stochastique.
Dans le cas où ce modèle est
déterministe, le reconstructeur d'état est appelé
observateur.
Dans le cas des systèmes bruité, où
intervient de phénomène aléatoire, on parle de filtres.
1°) Principe des
observateurs
Soit un système continu décrit par
l'équation d'état (déterministe non
bruité) :

Comme l'état n'est pas généralement
accessible, l'objectif d'un observateur consiste en vue de réaliser une
commande par retour d'état, d'estimer cet état par une variable
notée . Cette estimation est réalisée par un système
dynamique dont la sortie est précisément . Cette estimation est réalisée par un système
dynamique dont la sortie est précisément  et l'entrée sera constituée de U(t) et y(t). La structure
de l'observateur est de la forme : et l'entrée sera constituée de U(t) et y(t). La structure
de l'observateur est de la forme :
Où L est le gain de l'observateur.
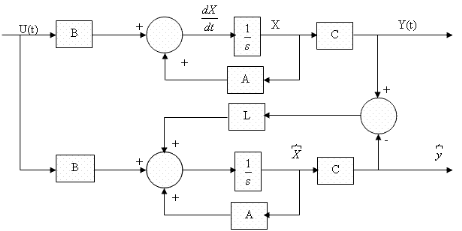
Figure I.4. Diagramme en bloc d'un estimateur
d'état d'un système
| 

