II. METHODES DE REGLAGE DES CENTRALES HYDROELECTRIQUES
1. INTRODUCTION
On désigne par régulateur, l'ensemble des
organes de mesure et réglage, non compris le servomoteur commandant
l'organe d'adduction d'eau de la turbine et par régleur les organes de
mesure et de réglage qui sont souvent standardisés, commandant le
tiroir de distribution, non compris ce dernier.
La figure suivante représente les organes de
réglage d'un groupe hydroélectrique complet avec deux consignes
de vitesse et de puissance, les chaînes de réaction
fréquence et puissance et enfin un régulateur de
réseau.
Cette figure met en évidence le fait que ce
régulateur peut faire partie d'un ensemble de trois boucles de
régulation, à savoir : celle de la vitesse (ou
fréquence), celle de puissance du groupe et celle par exemple, d'un
réseau électrique. Dans ce trois cas, la grandeur réglante
est la même, c'est-à-dire la position du vannage de la turbine. Ce
sont donc des régulateurs convergents.
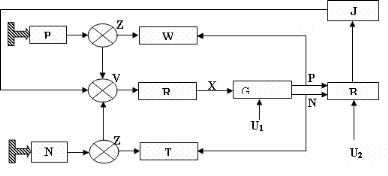
Figure II.1. Structure de la chaîne de
réglage à consigne de vitesse et de puissance avec
régulateur de réseau intégré d'un groupe
hydroélectrique .
La solution traditionnelle actuelle consiste à utiliser
la position du vannage de la turbine comme mesure ou comme moyen
d'asservissement de sa puissance. Ce procédé présente
cependant quelques inconvénients qui sont : premièrement,
à une ouverture donnée du vannage correspondent des puissances
différentes suivant la valeur de la chute nette de la turbine ;
deuxièmement, la loi liant la puissance à l'ouverture du vannage
n'est pas linéaire. Au lieu de chercher à corriger des
défauts par l'introduction d'une ou plusieurs cames dans l'organe de
mesure ou d'asservissement de la position du vannage, il est plus logique, au
point de vue réglage, de mesurer directement la puissance de
l'alternateur, opération que la régulation électronique
permet de faire sans difficulté.
Rappelons maintenant quelques exemples, tout à fait
classiques, destinés à illustrer principalement les fonctions des
boucles de régulation de vitesse et de puissance :
1. Le groupe n'est pas couplé sur un
réseau : la puissance électrique est alors nulle, seule la
boucle de régulation de la vitesse est en action. Son rôle est
d'amener ou de ramener au plus vite la vitesse de la turbine à sa valeur
de consigne dans le but de pouvoir coupler rapidement le groupe au
réseau lors d'un démarrage ou après déclenchement.
Pendant cette opération, la consigne de vitesse est en principe
pilotée par le coupleur automatique de la centrale.
2. le groupe est chargé de régler seul la
fréquence d'un réseau : dans ce cas extrêmement rare
mais intéressant à décrire, le réglage de vitesse
est en fait seul en action, il cherche à maintenir la puissance du
groupe égale à celle du réseau. Malgré les
variations de cette dernière, afin que la fréquence garde une
valeur la plus proche possible de sa valeur de consigne.
3. le groupe débite sur un réseau dont la
puissance est beaucoup plus grande que la sienne : la puissance est alors
imposée par le réseau et la boucle de régulation de la
puissance permet précisément de régler la puissance
fournie par la machine.
Par l'intermédiaire du sommateur du régleur, les
deux boucles de réglage de vitesse et de puissance lient la
fréquence à la puissance.
En effet, pour que le vannage reste immobile (régime
permanent), il faut que le sommateur du régleur ne délivre aucun
signal, ce qui implique que ses signaux d'entrée, provenant des
chaînes de vitesse et de puissance, doivent être en valeur absolue,
et de signes contraires ou nuls.
Cette liaison entre la fréquence et la puissance est
donnée par la caractéristique du statisme. Qui est une droite,
si les organes de mesure de la vitesse et de la puissance sont
linéaires. Cette caractéristique permet de définir le
statisme permanent fréquence -puissance et montre bien que le groupe
participe au réglage de la fréquence du réseau (cette
participation est d'autant plus forte que le statisme est faible). Une
variation de la valeur de consigne de la puissance provoque une translation de
la caractéristique de la fig.3 donc une variation de la puissance de la
machine pour une même fréquence. Le même effet peut
être par un ordre régulateur de réseau.
4. Un cas, moins rare que celui décrit plus haut sous
2, est réalisé lorsqu'une centrale ou groupe de centrales est
chargé de régler la fréquence d'un réseau dans
lequel les variations normales de puissance sont importantes par rapport
à sa puissance totale. la répartition de la puissance exige,
comme en 3, la présence des boucles de régulation de la puissance
de chaque machine, en d'autres termes un statisme individuel. La
fréquence est liée à la puissance totale par un statisme
global. Elle peut différer de la fréquence nominale, par exemple,
si la somme des puissances de consigne n'est pas égale à la
puissance du réseau. On peut éviter cet écart en
supprimant l'effet de la chaîne de puissance d'un groupe. C'est alors ce
dernier qui subira toutes les variations de puissance du réseau afin de
maintenir la fréquence constante pour autant que sa capacité de
réglage ne soit dépassée ; c'est le réglage en
« chef d'orchestre ».
Ainsi s'agissant de la boucle de régulation de la
vitesse dans notre travail, considérons que seule la boucle de
régulation de vitesse est en service. A cet égard, les turbines
hydrauliques sont, d'une façon générale, à classer
dans des systèmes difficiles à régler à cause du
phénomène du coup de bélier. Pour obtenir un
réglage de qualité dans tous les cas qui peuvent se
présenter, mêmes les plus défavorables, au double point de
vue de la stabilité en régime transitoire et de la
précision en régime permanent la construction d'un
régulateur PID est nécessaire.
Les spécialistes de réglage automatique, aussi
bien dans les domaines électriques, pneumatiques ou hydrauliques, ont
introduit une classification des régulateurs à action continue
basée sur le mode de régulation qui comprend principalement les
trois modes d'action : proportionnel P, par intégration I, par
dérivation D ainsi que les modes d'actions composées
résultant de leurs combinaisons.
Après avoir rapidement rappelé le sens et
l'utilité des régulations P, I et D et de leurs combinaisons,
nous allons établir une parallèle entre cette classification et
celle que l'on rencontre habituellement pour les régulateurs de vitesse
des turbines hydrauliques, soit : le régulateur
tachymétrique, accélérotachymétrique ou
régulateur à asservissement transitoire, et les
régulateurs accélérotachymétrique à
asservissement transitoire à avanceur des phases (régulateurs
accélérotachymétriques à dashpot) ; mais la
description complète des derniers sera faite dans le paragraphe
suivant.
Principalement la classification selon les modes d'action P,
I, et D est basée sur la forme mathématique de la relation liant
la grandeur réglante à l'écart de régulation,
c'est-à-dire, pour le réglage de la vitesse des turbines
hydrauliques, celle de la position du servomoteur du vannage à la
différence entre la valeur de consigne et la vitesse réelle du
groupe. Dans ce qui suit la valeur de consigne de la vitesse est
supposée maintenue constante.
Les régulateurs réalisant une
proportionnalité entre la grandeur réglante et l'écart de
régulation sont désignés par Régulateur P. En
ce qui nous concerne, aussi bien pour le réglage de la vitesse que pour
celui de la puissance, cette régulation présente
l'inconvénient de lier de manière gênante et permanente la
position du servomoteur à la valeur de la grandeur réglée.
Il s'ensuit donc des valeurs de la grandeur réglée
dépendant non pas seulement de sa valeur de consigne mais aussi de la
valeur de la grandeur réglante.
Afin d'éviter cet inconvénient, on superpose au
mode d'action proportionnelle le mode par intégration I. Le
régulateur devient PI. La grandeur réglante est alors la somme
d'un terme proportionnel à l'écart de régulation et d'un
terme proportionnel à l'intégral dans le temps de cet
écart. Comme en régime permanent la grandeur réglante est
constante, l'intégral cité ci-dessus l'est aussi, ce qui n'est
réalisé que si l'écart de régulation est nul. Le
mode d'action I introduit, par contre, un retard c'est-à-dire un
déphasage qui joue un rôle défavorable en ce qui concerne
la stabilité en régime transitoire.
Lorsque des difficultés de stabilisation apparaissent,
il est avantageux d'introduire un effet d'anticipation en ajoutant à la
grandeur réglante une composante proportionnelle à la
dérivée par rapport au temps de la grandeur réglée.
C'est le mode d'action par dérivation D.
Pour le réglage de vitesse envisagée
ici :
· L'action D est proportionnelle à
l'accélération du groupe, donc à l'écart entre les
couples moteur et résistant.
· L'action P est proportionnelle à l'écart
de vitesse.
· On peut représenter l'action I de plusieurs
manières. Elle est proportionnelle, par exemple, à la
différence entre la phase c'est-à-dire la position angulaire de
la machine et celle d'une référence tournant à vitesse
constante, en d'autres termes, l'écart entre les heures affichées
par une horloge synchrone et une horloge astronomique.
Ainsi en bref, nous pouvons dire que l'introduction d'une
action I dans un régulateur P améliore la
« Précision » en régime permanent
(indépendance entre les grandeurs réglante et
réglée) mais nuit à la stabilité ; celle d'une
action D améliore la stabilité, par conséquent les
performances en régime transitoire, sans affecter le fonctionnement en
régime permanent. Le meilleur régulateur est dans le cas qui nous
occupe certainement celui qui cumule les trois modes d'actions, P, I et D, donc
le régulateur PID.
| 

