REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET
POPULAIRE
Ministère de l'Enseignement Supérieur et de
laRecherche Scientifique
Université des Sciences et de la Technologie
Houari Boumediene

Faculté d'Electronique et
Informatique
Département Instrumentation et
Automatique
Mémoire de Projet de Fin d'Etudes
d'Ingénieur d'Etat en Electronique
Option : Contrôle
THEME
Utilisation des Machines à Vecteurs de Support
(SVM)
pour la reconnaissance des chiffres manuscrits.
Proposé et dirigé par :
Présenté par :
Melle. NEMMOUR Hassiba Mr. DIBOUNE Rabah
Mr. CHIBANI Youcef Mr. FELLAH Hassen
Soutenu le Devant le jury com posé de
:
Président :
Examinateur :
Promoteur :
Co-promoteur :
Promotion: 2006-2007
Remerciements
Nous remercions El laah de nous avoir donné la
volonté et le courage qui nous ont permis de
réaliser ce
travail, veuille t-il nous guider dans le droit chemin.
Nous aimons spécialement remercier Mlle H.NEMMOUR et
Mr V. CHIBANI, qui nous ont
proposé ce suj et , pour leur grandes
disponibilité pendant toute la durée de ce travail, pour
nous
avoir toujours encouragé face à la difficulté , mais aussi
pour leur gentillesse et leur
hospitalité.
Nous remercions aussi les membres de jury pour avoir accepter
de juger notre travail.
Pour terminer, nous remercions toute personne ayant
participé de prés ou de loin pour la
réalisation de ce
travail.
Dédicaces
A mes très chers parents qui ont toujours
été la pour moi, et qui m 'ont donné un
magnifique
modèle de labeur et de persévérance et tout
mon amour ;
A ma grand -mère khadudja qui a beaucoup sacrifie tout au
long de ma vie, qu 'El laah la
pardonne
A mes oncles ;
A mes chers
frères et soeurs : Mounir, Mehdi, Islam, Salim ;
A tous mes amis :
Hichem, Djamel, Abd el hak , Mbarek, Abd el fattah, Mourad
,Soufianne,...
;
Je dédie ce mémoire
Rabah
A mes très chers parents qui ont toujours
été la pour moi, et qui m 'ont donné un
magnifique
modèle de labeur et de persévérance et tout
mon amour ;
A ma grand -mère Haffssa qui a beaucoup sacrifie tout au
long de ma vie, qu 'El laah la
pardonne
A mes oncles ;
A mes chers
frères et soeurs : Mohamed, Kamel, Hossine, Salim ;
A tous mes amis :
Hichem, Billel, Oualid , Ayman,Hamza , Mohamed ... ;
Je dédie ce
mémoire
Tables des Matières
Introduction Générale
1
CHAPITRE 1
Reconnaissance des Chiffres Manuscrits
1. 1.Introduction ..3
1.2. System standard de reconnaissance des chiffres
manuscrits ...4
1.2.1 Acquisition de l'image 5
1.2.2. Prétraitement ..5
1.2.2.1. Binarisation de l'image ...5
1.2.2.2. Elimination du bruit ......6
1.2.2.3. Segmentation des chiffres 6
1.2.2.4. Normalisation de l'image.. 6
1.2.3. Classification 7
1.2.4. Post-traitement: ...7
1.3. Méthodes de classification 7
1.3.1 Réseaux de neurones 8
1.3.2 Support Vecteur Machine (Machines à Vecteur
de Support) 9
1.4. Conclusion 9
CHAPITRE 2
Machines a Vecteurs de Support
2.1. Introduction 10
2.2. Formulation mathématique des SVMs
10
2.2.1. Principe 10
2. 2.2. Données linéairement
séparables .10
2.2.3. Données non linéairement
séparable .13
2.2.3.1. Fonction noyau 15
2.2.3.2. Conditions
de
Mercer.........................................................................16
|
2.2.3.3. Exemples de noyaux
|
17
|
|
2.3. Implémentation multiclasse
|
..18
|
|
2. 3.1. Un contre tous (OAA : One Against All)
|
...18
|
|
2. 3.2. Un contre un (OAO : One Against One)
|
19
|
|
2.4. Méthode d'entrainement des SVMs
|
..19
|
|
2.4.1. Optimisation minimale et séquentielle
SMO
|
....20
|
|
2.4.1.1. Fonctionnement de l'algorithme SMO
|
.21
|
|
2. 4.1.1.1. Optimisation analytique des multiplieurs du
lagrangien
|
24
|
|
2. 4.1.1.2. Choix des multiplieurs du Lagrangien
|
...25
|
|
2.4.1.1.3. Mise à jour du seuil b
|
26
|
|
2. 4.1.1.4. Mise à jour de l'erreur
|
26
|
|
2.4.1.2. Pseudo code de l'algorithme SMO
|
..26
|
|
2.5. Conclusion
|
..30
|
Chapitre 3
Résultats Expérimentaux
|
3.1. Introduction
|
31
|
|
3.2. Critères d'évaluations
|
......31
|
|
3.1.1. Base de données USPS
|
.31
|
|
3.1.2. Matrice de confusion
|
.32
|
|
3.3. Apprentissage des SVMs
|
33
|
|
3.3.1. Réglage des paramètres
|
33
|
|
3.3.1.1. Paramètre de régularisation C
|
33
|
|
3.3.1.2 .Réglage des seuils de Tolérance et
å
|
34
|
|
3.3.2. Choix du noyau
|
34
|
|
3.4. Classification binaire
|
34
|
|
3.4.1. Choix des pairs de classes
|
34
|
|
3.4.2. Evaluations
|
.34
|
|
3.4.3. Comparaison des résultats et discussions
|
37
|
|
3.5. Classification multi classe
|
..38
|
3.5.1. Evaluations 38
3.5.2.
Comparaison des résultats et discussions
.....................................................44
|
3.6. Comparaison classification binaire et multi-classe
3.7. Présentation de la plateforme
|
..47 .47
|
|
3.7.1. Fenêtre principale
|
47
|
|
3.7.2 Menu
|
48
|
|
3.7.2.1. Sélection des fichiers
|
48
|
|
3.7.2.2. Sélection des
paramètres pour l 'apprentissage
|
49
|
|
3.7.2.3. Evaluation de la classification
|
.50
|
3.8. Conclusion 54
Conclusion Générale 55
Références Bibliographies ....A
Liste des figures et des tableaux
|
Figure 1.1 .Exemple des chiffres séparés
|
.4
|
|
Figure 1 .2.Exemple des chiffres touchés
|
...4
|
|
Figure 1.3.Diagrame des étapes principales de system de
reconnaisance standard
|
5
|
|
Figure 1.4.Exemple de segmention des chiffres manuscrits
|
.6
|
|
Figure 1 .5.Exemple des chiffres manuscrits normalisées
|
6
|
|
Figure 1.6. Apprentissage supervisé d'une machine.
|
.8
|
|
Figure 2.1. Hyperplan de séparation linéaire pour
des données linéairement séparables ...
|
11
|
|
Figure 2.2 .Hyperplan de séparation linéaire pour
des données non linéairement séparables......
|
13
|
Figure 2.3.Exemple d'une application CP rendant les
données linéairement séparables
15
Figure 2.4. Schéma synoptique de l'implémentation
Un Contre Tous 19
Figure 2.5. Deux cas d'optimisations 21
Figure 2.6. Quand les
deux multiplieurs sont égaux à la bande C : les vecteurs
de support 2 et
r donnent le même seuil b. Les points
8 et ?fournissentè les seuils
b1 et b2 respectivement. Les
points d'erreur et le seuil b se trouve entre
b1 et b2 26
Figure 3.1.Représentation de la base USPS 31
Figure 3.2. Exemple d'une matrice de confusion .33
Figure
3.3.Taux de bonne reconnaissance(%) pour chaque classe pour différents
valeurs du
paramètre du noyau RBF ...45
Figure 3.4.Taux de bonne
reconnaissance(%) pour chaque classe pour différents valeurs du
paramètre du noyau Polynomial .45
Figure 3.5.Taux de
bonne reconnaissance(%) pour chaque classe pour différents valeurs du
paramètre du noyau KMOD (a =6) 46
Figure
3.6.Taux de bonne reconnaissance(%) pour chaque classe pour différents
valeurs du
paramètre du noyau Distance négative ..46
Figure 3.7. Fenêtre principale ...47
Figure 3.8.
Rubriques de menu Fichier..48
Figure 3.9. Exemple de chargement de la base d'apprentissage
48
Figure 3.10. Rubriques de menu Apprentis sage ..49
Figure 3.11. Exemple de choix de noyau et les paramètres
pour la classification multiclasse.....49 Figure 3.12. Exemple de choix de
noyau et réglage des paramètres avec possibilité de
sélectionner
deux classes pour la classification biclasse ..50
Figure 3.13. Rubriques de menu Test 51
Figure 3.14.Matrice de confusion avec précision globale
...51
Figure 3.15. Taux de bonne reconnaissance pour chaque classe
représenté sous forme
graphique 52
Figure 3.16. Taux de bonne reconnaissance pour
déférentes classes représenté sous forme d'une
matrice de confusion et graphique. 53
Figure 3.17.Résumé des résultats ...54
Tableau 2.1. Exemples de noyaux 17
Tableau 3.1.
Échantillon représentant la première dizaine d'images
binarisées et leurs étiquettes
dans la base de données USPS 32
Tableau 3.2.Matrices de confusion pour les paires de classes (9
,4) pour chaque type de noyau 35
Tableau 3.3.Matrices de confusion pour les
paires de classes (5 ,6) pour chaque type
de noyau 36
Tableau 3.4.Matrices de confusion pour les paires
de classes (7 ,1) pour chaque type de noyau .37
Tableau 3.5.Taux global de bonne reconnaissance pour les trois
paires de classes (9,4), (7,1) et (5,6) .37
Tableau 3.6.Matrice de confusion de la classification multi
classe pour le noyau RBF (ó =3)... .38
Tableau 3.7.Matrice de confusion de la classification multi
classe le noyau RBF (ó =10) 39
Tableau 3.8.Matrice de confusion de la classification multi
classe le noyau RBF (ó =25) 39
Tableau 3.9.Matrice de confusion de la classification multi
classe pour le noyau Polynomial (p=1) 40
Tableau 3.10.Matrice de confusion
de la classification multi classe pour le noyau Polynomial
(p=2) 40
Tableau 3.11 .Matrice de confusion de la
classification multi classe pour le noyau Polynomial
(p=3) 41
Tableau 3.12.Matrice de confusion de la
classification multi classe pour le noyau KMOD ã =0.2
et ó=6 41
Tableau 3.13.Matrice de confusion de la classification multi
classe pour le noyau KMOD ã =0.5
et ó=6
.......................................................................................................................42
Tableau 3. 14.Matrice de confusion de la classification multi classe pour
le noyau Distance négative ã =0.2 42
Tableau 3.15.Matrice de confusion de la classification multi
classe pour le noyau Distance négative ã=0.1 43
Tableau 3.16.Matrice de confusion de la classification multi
classe pour le noyau Distance négative ã=0.05 43
Tableau 3.1 7.Résumé des résultats pour la
classification multi classe .........44
Introduction générale
Depuis plusieurs années, de nombreux travaux de
recherche ont porté sur la reconnaissance des chiffres manuscrits. Deux
grandes classes d'application sont aujourd'hui à l'étude : les
applications bancaires ou postales, qualifiés de hors lignes ou
statiques par exemple en France, deux millions de chèques sont lus
chaque jour sans intervention humaine et les applications destinés
à la bureautique, qualifiés de en lignes ou dynamiques ou temps
réel (voir [8] et respectivement [4] pour des exemples).
Dans ce mémoire, nous nous intéressons à
la reconnaissance des chiffres manuscrits hors - ligne qui reste aujourd'hui un
thème de recherche ouvert. En effet, bien que le nombre de classes
naturelles soit très réduit (chiffres '0' à '9'), on
trouve à l'intérieur de chacune d'entre elles, une très
grande variabilité de l'écriture, de plus, les conditions souvent
relativement précaires dans les quelles sont écrits les chiffres
(chèques écrits rapidement sur un coin de table) et la
variabilité du matériel utilisé (utilisation de divers
stylos, de différentes qualités de papier) tendent à
complexifier la reconnaissance.
Plusieurs générations de machines
d'apprentissage ont vu le jour dans le but de classifier, de catégoriser
ou de prédire des structures particulières dans les
données. Mais la plupart de ces techniques éprouvent de grandes
difficultés à traiter les données de très haute
dimension. Pour surmonter ce problème, on procède souvent par la
sélection d'une partie des attributs des données pour
réduire la dimension de l'espace d'entrée. Mais dans ce cas on
aura besoin d'utiliser des hypothèses simplificatrices qui ne se
vérifient pas toujours en pratique. Par ailleurs, une méthode
issue récemment d'une formulation de la théorie de
l'apprentissage statistique due en grande partie à l'ouvrage de Vapnik
en 1995 intitulé the nature of learning statistical theory [27]
surmonte ce problème en imposant que le nombre de paramètres soit
linéairement lié au nombre des données d'apprentissage.
Cette technique est appelée Support Vector Machines (SVM)
ou machines à vecteurs de support. Bien que récemment
proposée, elle a fait l'objet d'un nombre important de publications.
Le SVM est un modèle discriminant qui tente de
minimiser les erreurs d'apprentissage tout en maximisant la marge
séparant les données des classes. La maximisation de la marge est
une méthode de régularisation qui réduit la
complexité du classifieur.
De nombreux travaux ont démontré la
supériorité du SVM sur les méthodes discriminantes
classiques. Sa robustesse vis-à-vis de la dimensionnalité des
données et son pouvoir accru de
généralisation, font que le SVM est nettement
plus avantageux [20]. Le succès de cette méthode est
justifié par les solides bases théoriques qui la soutiennent.
L'objet de ce mémoire est l'implémentations des
SVMs pour la reconnaissance des chiffres manuscrits . Il est organisé en
trois chapitres. Le premier chapitre présente les différents
blocs, schéma standard de reconnaissance des chiffres manuscrits en
mettant l'accent plus précisément sur le bloc classifieur.
Le deuxième chapitre décrit en détail le
concept ainsi que la formulation mathématique des SVMs. Pour
résoudre le problème d'optimisation des SVMs, une description
détaillée de l'algorithme SMO est également
présentée dans ce chapitre.
Le troisième chapitre décrit les
différentes expériences réalisées sur une base de
données de chiffres manuscrits. Les expériences sont
réalisées pour une classification binaire puis multiclasse sans
oublier l'interface que nous avons développée sous environnement
Windows avec le logiciel matlab 6.5 et qui porte le nom « RCSVM ».
Dans la conclusion, nous rappelons l'objectif ainsi que les
perspectives de ce travail.

Reconnaissance des Chiffres
Manuscrits
1. 1.Introduction
Durant les vingt cinq dernières années, la
lecture optique et la reconnaissance d'écriture manuscrite ont
été des domaines de recherches actifs et ont fait l'objet de
nombreuses publications. [11] [14] [28] [26] [22] [17] [19] [3] [6]. En effet,
le problème de la reconnaissance de caractères manuscrits n'est
pas encore parfaitement résolu bien que l'on sache atteindre des taux de
reconnaissance supérieure à 90% dans diverses applications, telle
que la reconnaissance des 10 chiffres manuscrits. Dans ce sujet de
reconnaissance, deux grandes classes de systèmes sont aujourd'hui
à l'étude
- Les systèmes pour les applications bancaires ou
postales, qualifiés de hors-ligne ou statique. Dans ce cas, il s'agit de
réaliser un système pour lire le montant d'un chèque ou
pour lire une adresse postale sur une enveloppe, les informations transmises au
système seront les pixels d'une image acquise à l'aide d'un
scanner.
- Les systèmes destinés à la bureautique,
qualifiés de en ligne ou dynamique ou temps réel. Dans ce cas, il
s'agit de saisir un texte avec un stylo et une table à digitaliser pour
le transmettre à un traitement de texte, les informations se
présenteront sous forme d'une suite de points arrivant dans un ordre
bien déterminé, information qui sera importante pour la
classification [25]. Dans le domaine de reconnaissance, il faut faire une nette
distinction entre texte imprimé ou dactylographié et texte
manuscrit. Si dans le premier cas, on peut considérer que les
principales difficultés ont été surmontées, la
situation est entièrement différente en ce qui concerne la
reconnaissance d'un manuscrit que nous présenterons dans ce
présent chapitre pour le cas des chiffres, où les
difficultés resteront celles de la variabilité de
l'écriture [9]. Ces variations dépendent en général
aussi bien du scripteur que de l'environnement de l'écriture. En effet,
la variabilité mett ant en jeu le scripteur peut provenir de
l'inclinaison des caractères, de l'inclinaison de la ligne de base des
chiffres vue que des différents directions de ligne peuvent coexister
sur une même page du fait de changements d'orientation de la feuille en
cours d'écriture, etc. [16]. La variabilité liée à
l'environnement d'écriture correspond par exemple à la variation
de l'épaisseur des traits en fonction du type de stylo utilisé et
du support d'écriture disponible, ou à la présence plus ou
moins importante de discontinuités [2].
Dans notre mémoire, nous intéressons au
problème de reconnaissance d'écriture manuscrite hors-ligne, qui
demeure un problème difficile car l'entrée de ces systèmes
est une image. D'autres problèmes doivent également
surmontés comme par exemple, comment on peut enlever le bruit comme des
éléments du fond d'image, comment on peut traiter le manque
des
traits etc. De plus, il n'y a pas d'information
supplémentaire comme le cas d'en-ligne. D'ailleurs, pour être
utilisés largement, ces systèmes doivent traiter rapidement avec
le taux de reconnaissance élevé.
Par contre dans le cas de reconnaissance en ligne
l'utilisateur écrit sur une table spéciale, il y a moins de
bruit. De plus, on peut déterminer comment un caractère est
écrit, c'est à dire, l'ordre de traits constituants ce
caractère. D'ailleurs, la contrainte du temps de reconnaissance n'est
pas stricte, on peut utiliser des algorithmes complexes. C'est pour quoi le
taux de reconnaissance de ces systèmes est assez élevé.
[18]
Il faut distinguer deux types d'écriture manuscrite
hors-ligne. Dans le premier cas, chaque chiffre est séparé par
l'utilisateur. Par exemple, chaque chiffre est écrit dans une
boîte comme dans la figure suivante :

Figure 1.1 .Exemple des chiffres séparés.
Ce problème est bien résolu. Les algorithmes
utilisés sont souvent des SVM (Support Vector Machine), réseau de
neurones etc. [18]
Figure 1 .2.Exemple des chiffres touchés.
Dans le deuxième cas, les chiffres sont écrits
normalement, c'est à dire, les chiffres se sont touchés. C'est
à notre système de séparer ces caractères. Le
problème devient plus difficile. Dorénavant, quand on parle
d'écriture manuscrite, on aborde le deuxième cas.
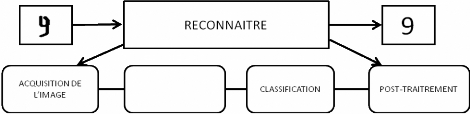
1.2. System standard de reconnaissance des chiffres
manuscrits
Le diagramme suivant montre les étapes principales du
processus de reconnaissance d'écriture manuscrit hors-ligne.
Image Classe
PRE-TRAITE M ENT
Figure 1.3. System standard de reconnaisance des chiffres
manuscrits.
La démarche classique suivie en reconnaissance de chiffres
manuscrits consiste à opérer selon les étapes suivantes
:
1.2.1 Acquisition de l'image
L'écriture est digitalisée par un scanner pour
être transformer en une image. Ceci correspond à l'entrée
du système. Cette étape est assez simple mais très
importante car elle influence sérieusement les étapes suivantes.
Deux paramètres importants doivent être
pris en compte :
· Résolution : la résolution normale est de
300 dpi (dot per inch : points par pouce). Cependant, dans certains cas,
lorsque la taille de l'écriture est petite, il est nécessaire
d'augmenter la résolution pour tenir compte de la finesse de
l'écriture.
· Niveau d'éclairage : l'éclairage influe
également sur la qualité de la reconnaissance. Trop faible, le
bruit devient important .Trop fort, le bruit est réduit mais les traits
fins disparaissent.
1.2.2. Prétraitement
Cette étape prépare l'image entrée pour
l'étape de reconnaissance. Elle essaie d'effacer les informations
indésirables comme le bruit. Les opérations typiques regroupent
la binarisation, élimination du bruit, segmentation en chiffres
isolés, normalisation et squelettisation.
1.2.2.1. Binarisation de l'image
L'image entrée est représentée en niveau
de gris et les algorithmes de reconnaissance courants travaillent souvent sur
des images binaires. Donc, il faut appliquer un seuillage. Cependant, quand le
fond est très compliqué, cela devient un problème
difficile au cas où l'éclairage varie dans l'image entrée,
on peut appliquer des techniques comme seuillage adaptatif [18].
1.2.2.2. Elimination du bruit
Le problème du bruit est très important mais
très difficile particulièrement dans le cas où
l'utilisateur écrit sur une feuille ayant le fond complexe comme un
chèque de banque. Une technique simple est de faire la soustraction
entre l'image entrée et l'image d'un chèque blanc (Il n'y a pas
d'écriture). Cependant, les deux images doivent être
alignées et les parties d'écriture qui traversent les
éléments du fond vont être enlevées. La
reconnaissance d'écriture sur un chèque de banque reste encore un
défi [18].
.
1.2.2.3. Segmentation des chiffres
La segmentation consiste à séparer les chiffres
les uns des autres. La difficulté de cette étape réside
dans le fait que les chiffres ne sont pas alignés et ne
présentent pas la même taille, de plus, dans certains cas, les
chiffres se chevauchent. Par conséquents, il faut utiliser des
techniques de séparation permettant d'isoler les chiffres [23].

Figure 1 .4.Exemple de segmention des chiffres manuscrits
1.2.2.4. Normalisation de l'image
Pour faciliter l'étape de reconnaissance, les chiffres
segmentés doivent être normalisées à une taille
fixée. La contrainte principale réside dans le choix de cette
taille. Trop petite, il y a un risque d'une perte d'information. Trop grande,
l'étape de reconnaissance va opérer lentement.

Figure 1 .5.Exemple des chiffres manuscrits
normalisées
1.2.3. Classification
La classification consiste à affecter une forme
donnée à une classe prédéfinie. Cette phase
regroupe les deux taches d'apprentissage et de décision. En effet,
à partir de la même description de la forme en paramètres,
elles tentent, toutes les deux d'attribuer cette forme à un
modèle de référence. Le résultat de l'apprentissage
est soit la réorganisation ou le renforcement des modèles
existants en tenant compte de l'apport de la nouvelle forme soit la
création d'un nouveau modèle de l'apprentissage. Le
résultat de la décision est un « avis » sur
l'appartenance ou non de la forme aux modèles de l'apprentissage. [1]
[24]
1.2.4 Post-traitement
Le post-traitement permet la validation des décisions
de l'analyse sur la base de connaissances (du domaine). Cette étape aide
à réduire considérablement des erreurs. Cependant, ce
n'est pas une étape complètement séparée des
étapes précédentes. [7]
1.3. Méthodes de classification
Généralement, un système de
reconnaissance est construit à partir des connaissances a priori sur le
problème. Le fait de classer un objet correspond donc à prendre
une décision sur base d'une ou plusieurs règles. Dès lors,
une des premières approches pour automatiser le traitement, fut
d'extraire la connaissance experte de spécialistes sous forme de
règles. Ainsi, pour chaque catégorie, on disposait d'un ensemble
de règles permett ant de déterminer l'appartenance d'un objet
à la-dite catégorie (ou classe). Bien que cette façon ait
été largement utilisée jusqu'à la fin des
années 80, on en conçoit aisément les limites. En effet,
quand le nombre d'exemples et de classes est très important, il devient
difficile de rassembler toutes les connaissances expertes nécessaires
aux prises de décision. Dans les années 90, l'approche
Machine Learning (ML) ou
apprentissage machine devient très populaire. Il s'agit d'apprendre
automatiquement les règles de décision sur base d'un ensemble
d'exemples déjà classés.
L'apprentissage machine inclut entre autres les
méthodes supervisées et non supervisées.
Dans les techniques non-supervisées, les objets sont
présentés sans leur catégorie. Un exemple type de
méthodes non-supervisées est le clustering dont le but est de
créer des groupes (clusters) d'objets présentant des
caractéristiques semblables.
Dans le cas des méthodes supervisées, on cherche
à estimer une fonction f(x) à partir des exemples x,
comme l'indique la figure ci-dessous. [15]

x,y = f(x)

Machine
f~(x)
x,y = f(x) : Une donnée et son
étiquette
f~(x) est une estimation de f(x)
Figure 1.6. Apprentis sage supervisé d'une machine.
Parmi les méthodes qui ont été
développées dans ce contexte (machine d'apprentissage), nous
distinguons par exemple les réseaux de neurones et les machines à
vecteurs du support (SVM : Support Vector Machines, en anglais).
1.3.1. Réseaux de neurones :
Un réseau de neurones est un assemblage de neurones
connectés entre eux. Un réseau réalise une ou plusieurs
fonctions algébriques de ses entrées, par composition des
fonctions réalisées par chacun des neurones. La capacité
de traitement de ce réseau est stockée sous forme de poids
d'interconnexions obtenus par un processus d'apprentissage à partir d'un
ensemble d'exemples d'apprentissage
Il arrive souvent que les exemples de la base d'apprentissage
comportent des valeurs approximatives ou bruitées. Si on oblige le
réseau à répondre de façon quasi parfaite
relativement à ces exemples, on peut obtenir un réseau qui est
biaisé par des valeurs erronées. Par exemple, imaginons qu'on
présente au réseau des couples situés sur une droite
d'équation , mais bruités de sorte que les points
ne soient pas exactement sur la
droite. S'il y a un bon apprentissage, le réseau
répond ax+b pour toute valeur de x présentée. S'il y a
surapprentissage, le réseau répond un peu plus que ou un peu
moins, car

chaque couple positionné en dehors de la droite va
influencer la décision. [10]
1.3.2. Support Vecteur Machine (Machines à Vecteur
de Support) :
Les réseaux de neurones éprouvent de grandes
difficultés à traiter les données de très haute
dimension, de plus, ils possèdent un grand nombre de paramètres
d'apprentissage à fixer par l'utilisateur. Pour surmonter ce
problème, on procède souvent par la sélection d'une partie
des attributs des données pour réduire la dimension de l'espace
d'entrée. Mais dans ce cas, on aura besoin d'utiliser des
hypothèses simplificatrices qui ne se vérifient pas touj ours en
pratique. Par ailleurs, une méthode issue récemment d'une
formulation de la théorie de l'apprentissage statistique due en grande
partie à l'ouvrage de Vapnik en 1995 intitulé the
nature of learning theory [27] surmonte ce problème en
imposant que le nombre de paramètres soit linéairement lié
au nombre des données d'apprentissage. Cette technique est
appelée Support Vector Machines (SVM)
ou machines à vecteurs de support. L'avantage principale
provient du fait qu'il ya peu de paramètres à régler
comparativement aux réseaux de neurones. Elle laisse très peu de
place aux paramètres utilisateurs, bien que récemment
proposée elle a fait l'objet d'un nombre important de publications.
1.4. Conclusion :
Dans ce chapitre, nous avons présenté les
différentes étapes de reconnaissance des chiffres manuscrits
hors-ligne et les méthodes de classification fondés sur les
machines d'apprentissage.
Dans le système de reconnaissance, nous nous
intéressons plus précisément au classifieur fondé
sur les SVMs .Aussi, nous abordons dans le prochain chapitre la description
détaillée de cette méthode de classification
appliquées à la reconnaissance des chiffres manuscrits. Cette
technique est appelé machines à vecteurs de support (SVM)
qui appliquée avec une efficacité remarquable à la
reconnaissance des chiffres manuscrits, au traitement d'images, à la
prédiction de séries temporelles, au diagnostic médical,
au contrôle qualité, etc. Des exemples d'application
réussie des SVM peuvent être consultés sur Internet
[12].
.

Machines à Vecteurs de
Support
2.1. Introduction
Le classfieur SVMs a été conçu pour une
séparation de deux ensembles de donnée. Il est
considéré donc comme un classfieur binaire.
Le but de SVM est de trouver un hyperplan qui va
séparer et maximiser la marge de séparation entre deux classes.
Le problème de recherche de l'hyperplan séparateur possède
une formulation duale. Ceci est particulièrement intéressant car,
sous cette formulation duale, le problème peut être résolu
au moyen de méthode d'optimisation quadratique.
Différents algorithmes d'optimisation ont
été développés parmi eux l'algorithme SMO
(optimisation minimale et séquentielle) qui est un algorithme rapide
proposé par platt [21] pour résoudre le problème de
programmation quadratique des SVMs.
2.2. Formulation mathématique des
SVMs
2.2.1. Principe
La tâche, qu'un classifieur doit effectuer, est
exprimée par une fonction appelée fonction de décision
reliant les exemples à classifier x
(appelés espace d'entrée) à leur classes
y (appelées espace de sortie). y
correspond souvent à {- 1, + 1}.
Soit: {,? Ë}, : " ? {#177; 1}
fá á fá R
l'ensemble de fonctions tel que (1, 1 ),,(, )?"×
{#177; 1}
xyKxlyl R
sont des exemples d'apprentissage indépendants
générés aléatoirement selon une distribution de
probabilité P(x,y) inconnue. Dans notre cas, la machine est
supposée déterministe pour un x donné et un
á donné, on obtient toujours la même sortie
f(x, á). Un choix particulier de á
génère ce que l'on va appeler «machine
entraînée».
L'objectif des SVMs est de trouver un hyperplan
permettant de séparer les données d'apprentissage de sorte que
tous les points d'une même classe soient d'un même coté de
l'hyperplan. Deux cas peuvent se présentent :
· Données linéairement séparables.
· Données non linéairement
séparables.
2.2.2. Données linéairement
séparables
On définit l'ensemble de données d'apprentissage
par :
{}{}" xyilyxR
,, =1,K,,?-1,+1,?
i i i i
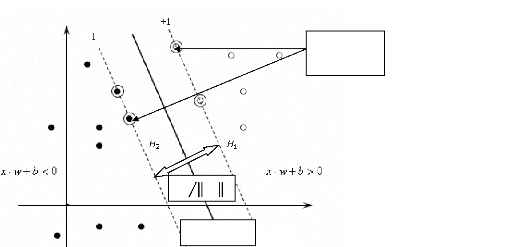
En supposant que nous disposons d'un hyperplan séparant
les données positives des données négatives, les
xi qui appartiennent à l'hyperplan vérifient
la relation :
. xi·w+b=0
(2.1)
w est la normale de l'hyperplan et b paramètre de
l'hyperplan (seuil).
Pour le cas linéairement séparable, l'algorithme de
vecteurs de support cherche simplement l'hyperplan séparateur permettant
la plus large marge. Ceci est formulé par :
xi · w+b=+1
pouryi=+1 (2.2)
xi·w+b=-1
pouryi=-1 (2.3)
Ces équations peuvent être combinées dans
l'inégalité suivante :
yi(x i
·w+b)=1;?i (2.4)
Vecteurs de support
: Données représentes des classes
2
w
xi
.w+b
0
Figure 2.1. Hyperplan de séparation linéaire pour
des données linéairement séparables.
Les points vérifiant l'égalité de (2.2),
appartiennent à un hyperplan H1 :
xi·w+b=+1 (2.5)
Similairement, les points vérifiant
l'égalité de (2.3), appartiennent à l'hyperplan H2 :
xi ·w+b=-1 (2.6)
(comme indiqué par la figure :2.1)
L'hyperplan optimal est celui pour lequel la distance aux points
les plus proches (marge) est maximale. Cette distance
vaut 2 w .
Maximiser la marge revient donc à minimiser 2
wde l'inégalité (2.4). Pour cela, le
problème est reformulé sous forme de Lagrangien. Il y a deux
raisons pour cela. La première est que la contrainte dans (2.4) sera
remplacée par une contrainte sur les multiplieurs du Lagrangien qui sera
plus facile à
traiter. En plus, dans cette reformulation du problème,
seules les données d'apprentissage apparaissent sous forme de produit
scalaire. Ainsi, on introduit des multiplieurs ái positifs,
i = 1,K , l dans (2.4). Les contraintes dans (2.4) sont
multipliées par les ái et sont ensuite
soustraites de 2
1 w pour former le Lagrangien.
2
l l
á (2.7)
i
1 2

L w y x w b
= - · + +
? = ( ) ? =
á
p i i i
2 i 1 1
i
1
L= ? á- ?
D i 2ij
(2.10)
i
,
áá ·
i j i j i j
y y x x
Lp est appelé lagrangien primal.
On doit minimiser le Lagrangien par rapport à w
et simultanément exiger que ses dérivées par rapport
à tous les multiplieurs du Lagrangien ái
disparaissent. Une autre contrainte impose que
?i, ái = 0. En imposant que les
gradients de Lp par rapport à w et b
disparaissent on obtient :
Vs
w ?
=á
i yx (2.8)
i i
i=1
?i =0
áiyi
(2.9)
Vs : Nombre de vecteurs de support.
En substituant les équations (2.8) et (2.9) dans (2.7)
nous obtenons :
LD: est appelé lagrangien dual.
Les points dont les ái sont strictement
supérieurs à 0 sont appelées vecteurs de support et
appartiennent à l'un des hyperplans H1 ou H2. Ces
points sont les plus proches de la frontière de décision et
forment le plan séparateur.
2.2.3. Données non linéairement
séparables
Lorsque les exemples ne sont pas linéairement,
séparables les contraintes (2.2) et (2.3) sont relâchées en
introduisant des variables d'écart îi ? 0, i =1,
....., l
qui deviennent : x i
·w+b=1-î i
poury i = +1 (2.11)
xwb î pour y (2.12)
i· +=
-1+i i= -1
î i =0 ?i (2.13)
Pour
qu'une erreur se produise, le îi correspondant doit
être supérieur à 1.
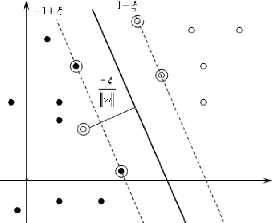
Figure 2.2. Hyperplan de séparation linéaire pour
des données non linéairement séparables
|
Maximiser la marge revient donc à minimiser + ?
2
w /2C
i
|
î i . (2.14)
|
C :est un paramètre choisi par l'utilisateur,
plus qu'il est grand plus la pénalité sur l'erreur est grande.
La formulation lagrangienne devient :

i i
1 2
L wC
P i
= +- i
2
? ? ?
î áîâî
{()}i
yxwb1(2.15)
iii
· +-+-i
i
Les âi sont des multiplieurs du
Lagrangien introduits pour forcer la positivité des
îi. Le Lagrangien doit être minimisé par
rapport à w, b,î et maximisé par rapport
à á etâ.
w = ? á i yx (2.16)
i i
i

= 0(2.17)
? ? i
L á
p y
=- i
? b i
? Lp
0
? b
C-ái-âi=0
(2.18)
?Lp =
î i
?
Ce qui induit à un problème dual :
(2.19)
Maximiser : Lyyxx
= ? á- ?áá·
1
D i ijijij
i
i , j
2
Sous contrainte que :
0=ái=C (2.20)
l
et ?i=0
áiy (2.21)
i
=
w
V S
?=
i 1
La solution est donnée encore par :
á (2.22)
iyixi
VS est le nombre de vecteurs de support
Dans le cas où 0< ái
<C , nous avons îi = 0 ce qui nous
permettra de déterminer le seuil b après l'optimisation. En
effet, une fois w et b sont déterminés la
fonction de décision est donnée par
|
? ?+>
fxi
() á
= ? ?=+
Vs
fxisign iyixixb1 si ()0
T
? ?x i fx
? 1 si () 0
?
? i1 ? ? - <
i
|
(2.23)
|
Les vecteurs de support aident à bien définir la
surface de décision car ces exemples utilisés dans le calcul de
cette fonction de décision.
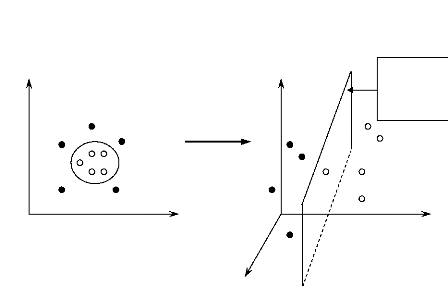
2.2.3.1. Fonctions noyaux
Dans la plupart des cas les données à classer ne
sont pas linéairement séparables. Tandis que les SVMs
sont conçus pour séparer linéairement les
données. L'idée des SVMs est de changer l'espace des
données. Cette transformation conduit à un changement de
dimension des données d'entrée. Par conséquent, il devient
donc possible d'envisager d'utiliser la méthode des SVMs.
Dans le problème d'apprentissage, les données
apparaissent sous forme de produit scalaire xi ·
xj.
Supposons que nous avons tracé ces données dans un
autre hyperplan .7{ (.7{ étant un espace euclidien
dont la dimension peut être infinie) en utilisant une application
Ö telle que :
x1
R
d?.7{
Ö :
Hyperplan
de
séparation
x2
x1
x2
Ö
x3
Figure 2.3. Exemple d'une application Ö rendant les
données linéairement séparables
Alors l'algorithme d'apprentis sage va dépendre des
données au travers des produits scalaires dans l'espace H des
fonctions de la formeÖ(x i
)·Ö(xj). Cet espace est
appelé espace de traits ou feature
space. Il est difficile de travailler explicitement avec
Ö. Dans ce cas, une fonction K appelé noyau ou
Kernel définie par Ê(xi
,xj ) = Ö(x i )·
Ö (xj). Ainsi, il suffit de définir uniquement
le noyau K
sans connaissance explicite de Ö. En
remplaçant xi · xj par
K(xi ,xj) partout, nous obtenons
une
machine à vecteurs de support fonctionnant dans un espace de
dimension infinie. Toutes les considérations décrites
précédemment seront vérifiées puisque nous
maintenons touj ours la séparation linéaire, mais dans un espace
différent.
2.2.3.2. Conditions de Mercer [15]
La fonction noyau ou Kernel évite la
connaissance explicite de Ö et permet ainsi de connaître la
similarité entre deux exemples. La matrice contenant les
similarités entre tous les exemples d'une base d'apprentissage
K est appelée matrice de Gram.
|
? KKK
11 12 1
L l ?
? ?
? KKK
21 222
L l ?
K=? ?
M M O
? ?
? KKK
llll
L
1 2 ?
|
(2.24)
|
Cependant, pour qu'une fonction K : X× X
?R corresponde au produit scalaire dans l'espace de traits, elle
doit répondre à des conditions dite de Mercer.
· Théorème
La fonction K(xi ,xj):
X× X ? R est un Kernel si et seulement si :
K=(K(x i ,x j
)/i,j=1, l) (2.25)
est définie positive.
Notons qu'une fonction X× X ? R
générant une matrice définie positive possède
les trois propriétés fondamentales du produit scalaire :
?x i ,xj ? X
1. Positivité : K(xi
,xj ) = 0 (2.26)
2. Symétrie :
K(xi,xj)=K(xj,xi)
(2.27)

3. Inégalité de Cauchy-Shwartz : K(x i
,xj) = xi·x j
(2.28)
La condition de Mercer nous indique si une fonction est un
noyau mais nous n'avons aucun renseignement sur l'application Ö
(et donc sur l'espace de traits) induit par ce noyau. Dans le reste de
cette section, nous présentons quelques noyaux utilisés dans
différentes applications de reconnaissance de formes.
2.2.3.3. Exemples de noyaux
Nous présentons dans le tableau les noyaux
utilisées dans ce mémoire pour la reconnaissance des chiffres
manuscrits.
|
Noyau
|
K(x i ,x j
)
|
|
|
Paramètres
|
|
RBF (Radial Basis Function)
|
2
? - ?
? x i x j ?
|
|
|
ó: est un paramètre qui
permet de régler la largeur de la gaussienne.
|
|
expó?- 2 ?
2
? ?
|
|
Polynomial
|
( )pp
x i , x j +1
|
|
|
: est l'ordre du polynôme.
|
|
Distance négative
|
( ) ãã
-x i - x
j
|
|
|
: Paramètre du noyau régler dans ]0,2].
|
|
KMOD: (de l'anglais «Kernel with Moderate
Decreasing»)
|
? ? ?
2
?? ã ??A:
A
|
- 1
|
?
?
|
??normalisation.
est une constant de
? et : contrôlent
ó
l'écrasement du noyau.
|
|
??exp2
? 2 ?
-+ó
xixj
? ? ?
Avec :
1
A=
|
|
ã 2
?? -
exp1??
|
|
2
? ó ?
|
Tableau 2.1. Exemples de noyaux

M
(2.33)
arg max
)
f
1
(xi
i=
Il est possible de composer de nouveaux noyaux en utilisant des
noyaux existants. Si K1(·,·),
K2(·,·) sont des fonctions satisfaisant les
conditions de Mercer, et étant donnés +
a?R et B une matrice
définie positive, alors les fonctions suivantes sont des
noyaux :
1. (ij)(ij)(ij) KxxKxxKxx
,=1,+2, (2.29)
2.
K(xi,xj)=aK1(xi,xj)
(2.30)
3. K(xi xj ) K(xi
xj )K(xi xj)
,= 1 ,2 , (2.31)
4. ()j
Kxi,xj=xiÂx
(2.32)
T
2.3. Implémentation multi-classe
A l'origine, les SVMs ont été
conçus essentiellement pour la séparation de 2 classes.
Cependant, plusieurs approches permettent d'étendre cet algorithme aux
cas de plusieurs classes [5].
2.3.1. Un Contre Tous (OAA : One Against All)
Pour chaque classe, on détermine un hyperplan
séparant celle-ci de toutes les autres classes. Ainsi, pour M classes,
on doit déterminer M fonctions de décision.
Tous les exemples appartenant à la classe
considérée sont étiquetés positivement (+1) et tous
les exemples n'appartenant pas à la classe sont étiquetés
négativement (-1).
La figure 2.4. décrit le schéma synoptique de
principe pour la séparation multi-classe.
Ainsi, pour chaque exemple de test, M valeurs de sortie
fi (x)avec (i=1,... M) sont disponibles.
Ainsi, une donnée est affectée à la classe
qui correspond à la valeur maximale des fonctions de décision
:
|
|
|
|
|
|
|
|
|
Classe 1
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SVM1
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
.
|
|
Autres classes
|
Affectation à la classe
|
|
|
|
|
|
|
|
|
|
|
|
|
Forme x
|
|
|
|
|
|
.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
.
|
|
|
Classe M
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SVMM
|
|
|
|
|
|
|
|
|
|
|
|
Autres classes
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Figure 2.4. Schéma synoptique de l'implémentation
Un Contre Tous
2.3.2 Un contre un (OAO : One Against One)
La deuxième méthode, est une méthode dite
de Un Contre Un. Au lieu d'apprendre M fonctions de décisions,
ici chaque classe est discriminée d'une autre. Ainsi M (M-1 )/2
fonctions de décisions sont apprises et chacune d'entre elles effectue
un vote pour l'affectation d'un nouveau point x. La classe de ce point x
devient ensuite la classe majoritaire après le vote.
2.4. Méthode d'entraînement des SVMs
[21]
Le calcul de la solution d'un SVM consiste à
résoudre le problème de programmation quadratique qui est un
problème d'optimisation formulé comme suit :
l ll
() ( ) i j
1 max(2.34)
i j i j
,
á ?== ?? =
L y y K x x
Di
áá á
á
= -
i1 1 1
2 ij
Sous contrainte que :
0=ái = C,?i
(2.35)
(2.36)
l
et 0
?=
á i y i
i =
1
Le problème de programmation quadratique (PQ)
provenant d'une SVM ne peut pas être facilement
résolu avec les techniques standards. La matrice de gram contient un
nombre d'éléments égal au carré du nombre total des
données de la base d'apprentissage. Pour résoudre ce
problème, Un algorithme appelé Sequential Minimal
Optimisation SMO ou Optimisation minimale et séquentielle, a
été proposé pour accélérer l'apprentissage
d'un SVM [21].
L'optimisation de ce problème se termine lorsque tous les
exemples de la base d'apprentissage obéissent aux conditions
Karush-Kuhn-Tucker (KKT) [21] suivant :
()xi
yfx() i i
1,0
î=
i
f x
( )
i i
= ?
1, 0 (2.39)
î
Cy
i
á =
i i
0 yf 0<<
áC
i
ái
avec :f(xi) = x i ·
w+b
==
(2.37) (2.38)
1,0
î i
2.4.1. Optimisation minimale et séquentielle
SMO
L'optimisation minimale et séquentielle est un
algorithme rapide proposé par platt[21] pour résoudre le
problème de programmation quadratique des SVMs sans la
nécessiter de stoker une grande matrice en mémoire (matrice de
gram) et sans une routine numérique itérative pour chaque
sous-problème. SMO décompose le problème de
PQ en plusieurs sous-problèmes aussi mais contrairement aux
autres méthodes, à chaque étape SMO optimise le
plus petit problème possible. Ainsi à chaque étape il
optimise deux multiplieurs de Lagrangien. A chaque étape d'optimisation,
SMO cherche les valeurs optimales des deux multiplieurs et effectue
une mise à jour de la SVM pour donner le reflet des nouvelles
valeurs optimisées.
2.4.1.1. Fonctionnement de l'algorithme SMO
L'algorithme SMO comporte trois éléments
:
1. Une méthode analytique pour résoudre le
problème de PQ.
2. Des heuristiques pour choisir les deux multiplieurs à
optimiser. 3. Une méthode pour calculer le seuil b.
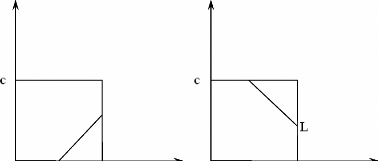
2.4.1.1.1. Optimisation analytique des deux multiplieurs du
Lagrangien
Les deux multiplieurs de Lagrange doivent satisfaire toutes les
contraintes du problème de (PQ) Rappelons que le
problème de programmation quadratique pour entraîner une SVM
est décrit par les équations (2.34), (2.35) et (2.36). Les
contraintes d'inégalité font situer les multiplieurs de
Lagrangien à l'intérieur du carré. La contrainte
d'égalité les situe sur une ligne diagonale. Par
conséquent, une étape de SMO consiste à trouver
le (á)
max á LD sur le
segment de droite délimité
par le carré, avec :
á iyi
l
á1y1+á2y2=ã
où ?
ã=-
i3=
ã=á1 old
+sá 2 old (2.40)
qui dépend á1,á2
ets = y1.y2.
ã est une constante, puisque les autre
multiplieurs de Lagrangien qui ne vont pas être optimisés sont
considérées comme des constantes.
La contrainte sur chaque ái est : 0 =
ái = C ainsi, les deux multiplieurs se
trouvent dans une surface limitée comme le montre la figure 2.5.
On a deux cas d'optimisation selon que y1 et
y2 ont le même signe ou pas.
(a) (b)
H
á2
H
á2
Figure 2.5. Deux cas d'optimisation
(a) y1 ? y2
(b) y1 = y2
· Premier cas (a) :
Implique que : aa old y
1-= (2.41)
old
2
Les limites de á2 sont donc :
L ( ?ld )
=max0, a 2 - a (2.42)
?ld
1
H = minC, C +á
2 - á1 (2.43)
(ol'ol')
· Deuxième cas (b) :
Implique que : ol' + ol' =
á 1 á 2 ã
(2.44)
Les limites de á2 sont donc :
L = max(0,á 1 ol' +
á 2 ol' - C) (2.45)
H = minC,á 1 +
á 2 (2.46)
( ol' ol')
l ll
LD (á) peut être
exprimée par : LD i yyk
=-
?=á=??=áá
1
i j ij i j
1 2 1 1
iij
|
(2.47)
|
|
Avec: () ()T
k ijKxix j et l
=,á =
á1,K,á
En mettant LD sous forme d'une fonction de
á2 telle que s = y1
y2 , á 1
=ã - sá 2 et
l
en posant : ?
íi=
|
yjjkij
á
|
on obtient : (2.48)
|
|
j 3
1 1 1
=- + - + - -
ãááããáá2
skksk
2
2 2 11112 11 2
2 2 2
LD ()á2
- +
sk122
ãá
kyyáíãí 2-+ 12 2
111
1
|
s y
á í á
2 2 2 2
-
|
+
|
L Cons te
tan
|
|
l
ll
où : Lyyk
conste i
=-
?á1 (2.50)
tan 2 ??=áá
i j ijij
i=3 3 3
i=j
La dérivée première de LD
par rapport à á2 est telle que :

-
+ sy
y2í
2 12
- skã
k12á
11
í
2
+
2
2
ss++ 1 ã
- + + s sk
1 11
(2)222 122 12(2)2(1
2)
ãáááãáíí
--+ --+ -
skksksy
(2.51)
?LD
?á2
=
- - kk
112 22
áá
k 11
La dérivée seconde de LD par
rapport à á2 est donnée par :
? 2
LD (2.52)
= - - =
ç
2
? á2 12 11 22
2 k kk
Nous pouvons à pré sent calculer le maximum
LD en permutant uniquement le changement de deux
multiplieurs. On définit Ei comme étant
l'erreur sur l'ieme exemple d'apprentissage, soit :
E i =ui -yi
(2.53)
Où u i est la sortie fournie
par le SVM à l'exemple (xi, y i
).
l
|
u yk b
1 á 1
=?=1 j j j -
j
|
(2.54)
|
On trouve :
í=u+b-yák-syák
1 1 2212 2111 (2.55)
Similairement,
í=u+b-yák-yák
2 2 1112 2222 (2.56)
|
Au point maximal de LD, l'équation
(2.57)
|
?LD est nulle. Ainsi
?á2
|
á ã í í
2 11 22 12 11 12 2 1 2 1
( k k k ) s ( k k ) y ( ) s
+ - = - + - + - (2.57)
En substituant (2.55) et (2.56) dans
(2.57), nous obtenons :
new old yE-E
()
áá
=- (2.58)
21 2
2 2 ç
Une fois new
á est trouvée, il correspond au maximum
sans contraintes. Comme il doit être limité
2
par les points limites de la diagonale on utilise :
?H siH
á new =
2
?
,
á new clipped newnew
= ? áá
si L H
<< (2.59)
2 2 2
? =
?L si L
á new
2
Pour calculer new
á, nous utilisons l'équation suivante :
1
áááánew newclipped old
old
+ = +
ss ,qui conduit à : 1 21
2
á 1 á 1á 2
á 2
new =old+ s
? old - new,clipped?
?? ??(2.60)
Remarque : Quand on évalue ç, la
dérivée seconde de LD avec l'équation
(2.52), on constate qu'elle est nulle quand plus qu'un exemple dans les
exemples de la base d'apprentissage ont le même vecteur d'entrée
x. Dans ce cas, on doit chercher dans ce cas, un autre exemple pour
l'optimisation. Sous certaines circonstances inusuelles, ç
n'est pas négatif. Alors, SMO évalue
(maxLD) aux deux points de fin du segment. (Voir figure
2.5).
2.4.1.1.2. Choix des deux multiplieurs du Lagrangien
L'algorithme SMO est basé sur
l'évaluation des conditions de KKT. Quand tous les multiplieurs
vérifient ces conditions, l'algorithme s'arrête. En pratique ces
conditions sont vérifiées à une erreur près
å.
· Choix du premier multiplieur
D'abord, la boucle externe de l'algorithme effectue une
itération sur toute la base d'entraînement pour vérifier
s'il existe des exemples qui violent les conditions de KKT. Une fois
qu'un violateur est trouvé il est immédiatement choisi pour
être optimisé.
· Choix du second multiplieur :
SMO utilise une autre heuristique pour le choix du
second multiplieur .Cette heuristique tente de maximiser E1 -
E2 dans l'équation (2.58). On choisit le multiplieur qui
permet de donner la plus grande valeur de cette différence. Rappelons
qu'une valeur d'erreur E est déjà calculée pour
chaque
exemple dont le multiplieur est différent des limites
0 et C, car c'est à partir de ces exemples que le
multiplieur est choisi. Si E1 est positive, l'exemple qui
possède la plus petite valeur de E2 est choisi. Si
E1 est négative, alors l'exemple avec la plus grande
erreur E2 est choisi. SMO utilise, en effet, une
hiérarchie dans le choix du second multiplieur. S'il n'y a pas un
progrès positif, l'algorithme effectue une itération sur les
exemples dont les multiplieurs sont différents de 0 et de C
en partant d'une position aléatoire. Si aucun d'entre eux ne permet
d'avoir un progrès positif, il reprend la recherche sur toute la base
d'entraînement en partant d'une position aléatoire.
Et alors les deux multiplieurs sont conjointement
optimisés. A la fin de l'optimisation, le SVM est mis à
jour et l'algorithme reprend la recherche des exemples violateurs. Après
un passage sur toute
la base d'apprentissage, la boucle externe commence à
travailler uniquement avec les exemples dont les multiplieurs appartiennent
à l'intervalle ]0, C[ jusqu'à ce que tous les exemples
vérifient les conditions KKT. A ce moment, la boucle externe
reprend l'itération sur toute la base
d'apprentissage. Elle passe alternativement entre toute la
base d'apprentissage et l'ensemble des exemples dont les multiplieurs sont
différents de 0 et de C, jusqu'à ce que tous les
exemples vérifient les conditions KKT à une erreur
å près.
Après avoir trouvé les deux multiplieurs à
optimiser conjointement, on calcule leurs valeurs grâce aux formules
(2.59) et (2.60) et on met à jour la SVM.
L'algorithme SMO s'arrêt lorsque il ne reste
aucun multiplieur de Lagrangien qui viole les condition KKT.
2.4.1.1.3. Mise à jour du seuil b
La valeur de b est calculée à la fin de
chaque optimisation.
l
Soit u1 la réponse de SVM avec les
anciennes valeurs de á1
etá2.
old (2.61)
uykykykb
1 1 1 11 2 2 22
=++-
ááá
old old old old?111
1
Si la nouvelle valeur de á1 est
différente de C, alors la sortie du SVM après
l'optimisation sera y1.
l
(2.62)
Donc : yykykyk b
= + +-
ááá
new newclipped
,
1 1 111 2212 ?111
1 1
1
3
Nous déduisons ainsi :
b E byky k
=+ + ? -
old new old newclipped old
? ,, ?
1 1 1 1 1 1122
?? áááá
??+? -
?? 2 12
??(2.63)
De la même manière nous obtenons le seuil
b2.
b E by k yk
=+ + ?-
oldnew old newclipped old
? , ?
2 2111 12 22
?? áááá
??+ ? -
?? 2 22
??(2.64)
X2
0
ë
á i = C , î i >1
è
ô
ä
X1
0<á i <C , î
i =0
á i = C,0 <î i
<1
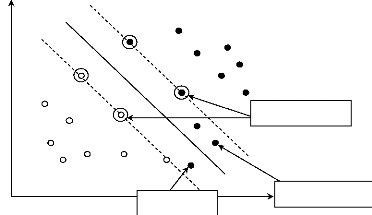
Figure 2.6. Quand les deux multiplieurs sont égaux
à la bande C : les vecteurs de support ë et
ô donnent le même seuil b. Les points ä
et è fournissent les seuils b1 et
b2 respectivement. Les points d'erreur et le seuil b
se trouve entre b1 et b2.
Si á i = C , dans ce cas, on peut
prendre b new +
= comme étant la valeur du seuil.
b 1 b 2
2
2.4.1.1.4. Mise à jour de l'erreur
Après l'optimisation, lorsqu'un multiplieur de
Lagrange possède une valeur différente de C, l'erreur
correspondante est mise à zéro. Les erreurs des autres
multiplieurs dont la valeur est différente de C et qui n'ont
pas été concernés par l'optimisation sont mises à
jour comme suit :
Ek= E+u-u
(2.65)
new oldnew old
k k k
Nous obtenons ainsi :
EEykykb b
new = + ? -
old new old? newclipped old
, ?old new
kk ?? á á áá
??+ ? -
k ?? ??+ -
k (2.66)
11 1 122 2 2
Dans ce qui suit, nous donnons le pseudo code de l'algorithme
SMO.
2.4.1.2. Pseudo-Code de l'algorithme SMO
Target : il contient la sortie désirée
(+1 ou -1).
Routine principal
Début
Initialiser les paramètres d 'apprentissage (C,
tolérance, epsilon, type de noyau, paramètres du noyau)
Initialiser les multiplieurs á [i] à
zéro.
Initialiser le seuil b à zéro.
Chargement de la base d'apprentissage
Numchanged = 0 /* variable qui incrémente pour chaque
optimisation des multiplieurs*/ Examineall = 1
Tantque (Numchanged > 0 ou Examineall==1), Faire
Numchanged = 0
Si Examineall= 1, alors
Pour (i= 1 : l), Faire /*répéter i sur tous
les exemples d'apprentissage*/
Numchanged= Numchanged+Examine_Exemple (i) /*
Exam ine_Exemple est une fonction
est définie plus loin*/
Fin si
Sinon Faire
Pour (i=1, : l), Faire
Si (á[i] != 0 et á[i] != C), alors
faire
Numchanged = Numchanged +Eamine_Exemple(i)
Fin si Fin sinon
Si (Examineall == 1), alors faire
Examineall= 0
Fin si
Sinon Faire
Si (Nnumchanged = 0), alors faire
examineall= 1;
Fin si
Fin sinon Fin Tant que FIN
Fonction Examine Exemple(i1)
/*cette fonction permet le choix de deux multiplieurs
à optimiser*/
Chapitre2 Machines à vecteurs de support
(SVMs)
Debut
y1 = Target[i1]
á1=á[i1]
Si((á1 >0) et (
á1< C)) alors faire
E1= error _cache[i1] /*Error cache calculé par la
fonction takestep*/
Fin si
Sinon Faire
E1= (learnedjunction(i1)- y1 /* learnedjunction
clacule la fonction de décision*/
Fin sinon r1=y1 *E1
Si rtolérance etCou rtoléranceet )alors
faire
(() ()
<-<> >
) ( 0
á á
1 1 1 1
i2= -1
tmax=0
pour i=1, l faire
Si ((á[] > 0) (á[] < ))
ietiCalors faire))
E2= error _cache[i] temp= abs (E1-E2)
Si (temp >tmax) alors faire
tmax= temp
i2= i
Fin si
Fin si
Si (i2= 0) alors faire
Si (takstep(i1,i2) alors retourner 1 Fin si
Fin si
Fin pour
en commençant à une position aléatoire
q
pour i=q ,l+q faire
i2=l modulo n
Si ((á[i2] > 0 ) et
(á[i2])< C)) alors faire
Si ((takestep(i1,i2) alors retourner1 Fin si
Chapitre2 Machines à vecteurs de support
(SVMs)
Fin si Fin pour
en commençant à une position aléatoire
q
pour i=q,q+l faire
i2=l modulo q
Si (takestep(i1, i2)) alors retourner1 Fin si
Fin si Fin pour retourner 0
FIN
Fonction takestep(i1,i2)
/* Cette function permet de :- l 'optimisation de deux
multiplieurs choisir
-mise à jour du seuil b
- mise à jour de l'erreur */
Début
Si i1=i2 alors retourner 0 Fin si
á1=á[i1]
y1 =target[i1]
á2=á[i2]
y2 = target[i2]
S=y1.y2
Calcule L,H
Si (L=H) retourner 0 Fin si
k11 = kernel(exemple[i1], exemple[i1])
k12 = kernel (exemple[i1], exemple[i2]) k22 =
kernel (exemple[i2], exemple[i2])
ç 2.k12 - k11 -
k22
Si (ç<0) alors faire
ááç
22y2.(E1E2)/
new=-- Si(new
á2<L)
á2=L
new
Sinon si ( new
á2>H)
á2=H
new
Fin si
Sinon alors faire
Calculer Lobj et Hobj à partir de (max
LD) en remplacent new
á=L et new
á=H
Si (Lobj>Hobj+ eps) faire
á2=L
new
Sinon si (Lobj<Hobj-eps) faire
á2=H
new
Si non faire á2= á2
new
Fin sinon faire
Si (ánew-
á<epsánew+
á+ eps
22 .(22 )) retourner 0 Fin si
á1 new = á1-(2 new 2
s á-á)
Mise à jour du seuil pour refléter le
changement dans les multiplieurs de Lagrangien.
Mise à jour de l'erreur pour les autres exemples et
mettre les erreurs des multiplieurs qui viennent d'être optimisés
à 0.
FIN
5. Conclusion
Ce chapitre a été consacré à la
présentation de la formulation mathématique des SVMs et
l'algorithme utilisé pour son optimisation. Celle-ci est fondée
sur l'utilisation de l'algorithme SMO qui permet l'accélération
de l'apprentissage sans la nécessiter de stoker la matrice de Gram en
mémoire. Son principe repose sur l'optimisation de deux multiplieurs de
lagrangien à chaque étape. Le prochain chapitre sera
consacré à l'évaluation des SVMs pour la reconnaissance
des chiffres manuscrits.

Ré sultats exp érimentaux
3.1. Introduction
Dans ce chapitre, nous allons soumettre notre
implémentation SVM avec l'algorithme SMO à deux types de tests:
les tests binaires appliquées aux paires des chiffres les plus
fréquemment confondus et les tests multi-classes Par l'approche
un-contre-tous. Différents noyaux serons utilisées avec
différents paramètres pour évaluer les performances des
SVMs .
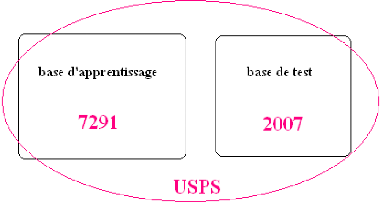
Figure 3.1.Représentation de la base USPS.
3.2. Critères d'évaluations
3.1.1. Base de données USPS (de
l'anglais«US postal Service »)
L'USPS est une base de données de chiffres manuscrits
extraits à partir d'enveloppes. La base de données contient 9298
images de chiffres manuscrits arabes dont 7291 images d'apprentissage servent
à construire le classifieur et 2007 images de test servent à
tester le classifieur et l'estimation de son taux d'erreur réel. Ces
images ont été saisies à partir d'images d'enveloppes
collectées au centre CEDAR à Buffalo (États Unis) [30].
Chaque image de chiffre est représentée par 16×16 pixels de
niveau de gris allant de 0 à 255 (Tableau 3.1). Il est connu que
l'ensemble de test d'USPS est plutôt difficile puisque l'erreur humaine
se situe autour de 2.5% [13].
Etiquettes
|
0
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
|

Images
Tableau 3.1. Échantillon représentant la
première dizaine d'images binarisées et
leurs
étiquettes dans la base de données USPS
Dans ce mémoire, nous nous restreignons à la
méthode SVM et aux images originales d'USPS. Une fraction de 500 images
a été extraire à partir de 7291 pour servir a
l'apprentissage et pour le test nous utilisons tous les prototypes (2007
image).
Pour évaluer la robustesse du classifieur, nous utilisons
la matrice de confusion pour estimer le taux de bonne reconnaissance.
3.1.2. Matrice de confusion
Dans la terminologie de l'apprentissage supervisé, la
matrice de confusion est un outil servant à mesurer la qualité
d'un système de classification. [29].Par exemple, si on considère
un système de classification dont le but est de classer des prototypes
en classe1 et en classe2, on va vouloir savoir combien de prototypes seront
faussement considérés comme du classe1 et combien de classe2 ne
seront pas identifiés comme tels. On va supposer qu'on a testé
notre classificateur avec 100 prototypes de classe 1 et 100 prototypes de
classe2. Ainsi la matrice suivante se lit comme suit :
· sur les 100 prototypes de classe 1, 95 seront
considérés comme tels et 5 seront pris pour du classe2 ;
· sur les 100 prototypes de classe2, 3 seront
interprétés comme classe1, et 97 seront reconnus en tant que
classe 1 ;
· sur les 98 prototypes que le système classe comme
classe1, 3 sont en fait du classe2 ;
· sur les 102 prototypes que le système classe comme
classe2, 5 sont en fait du classe 1.
· Taux global de bonne reconnaissance (TGBR) : (somme de
prototypes bien classées (diagonale)/somme totale) * 100
· Dans cet exemple= ((95+97)/200)*100=96.00
Référence
Classe 1 95 5
Classe 2
Décision
Classe 1
3
Classe 2
97
Figure 3.2.Exemple d'une matrice de confusion
· les colonnes correspondent aux décisions
correctes
· les lignes correspondent aux décisions
données par le classifieur.
Cette notion peut bien sûr s'étendre à un
nombre quelconque de classes. Un système de classification sera d'autant
meilleur que sa matrice de confusion s'approchera de la matrice diagonale.
3.3. Apprentissage des SVMs
3.3.1. Réglage des paramètres
Nous avons utilisé pour l'apprentissage binaire et
multiclasse les paramètres suivants :
3.3.1.1. Paramètre de régularisation C
La valeur du paramètre C est un hyper-paramètre
qui régit la performance du SVM. Ce paramètre sert à fixer
le compromis entre la minimisation de l'erreur d'apprentissage et la
maximisation de la marge. En pratique, le comportement du SVM est sensible
à la valeur de C uniquement si les données d'apprentissage ne
sont pas séparables. Dans ce cas, il existe des valeurs critiques qui
peuvent compromettre la performance du classifieur. Une très grande
valeur de C (quelques milliers) peut faire que la fonction objective
minimisée par le SVM ne soit plus convexe et empêcherait sa
convergence. Une très faible valeur de C tend à diminuer la
capacité du classifieur [20].
Dans ce travail, après quelques expériences, le
paramètre C a été fixé à 100 car il offre
les meilleures performances.
3.3.1.2 .Réglage des seuils de Tolérance et
å (=eps) :
L'algorithme SMO est basé sur
l'évaluation des conditions de KKT. Quand tous les multiplieurs
vérifient ces conditions, l'algorithme s'arrête. En pratique ces
conditions sont vérifiées à une erreur près
å . Platt [21] a mentionné dans son article que
å est typiquement choisi dans l'intervalle 10-2 et
10-3.
La maximisation de la marge doit être
tolérée de l'ordre :10%, 0.1%..etc
Dans notre cas nous avons fixé å , et la
tolérance a 1 0-3 .
3.3.2. Choix du noyau
Quatre noyaux ont été utilisés dans notre
travail :
· Polynomial
· RBF (Radial Basis Function)
· Distance négative
· KMOD : (de l'anglais «Kernel with Moderate
Decreasing») 3.4. Classification binaire
3.4.1. Choix des pairs de classes
Dans cette expérimentation, nous voulons
expérimenter la performance des SVMs pour séparer deux classes
les plus fréquemment confondus.Ces classes correspondant aux paires
(9,4), (5,6) et (7,1).
3.4.2. Evaluations
Pour évaluer l'influence du paramètre de chaque
noyau sur la qualité de la classification, nous avons calculé le
taux de bonne classification pour chaque paire de classes .Les résultats
sont présentés dans les tableaux suivants :
p=1
|
classe 9
|
classe4
|
classe 9
|
94.91
|
5.09
|
classe 4
|
3.5
|
96.5
|
|
a =3
|
classe 9
|
classe4
|
classe 9
|
94.91
|
5.08
|
classe 4
|
3.5
|
96.5
|
|
y = 0.2
|
classe 9
|
classe4
|
classe 9
|
96.04
|
3.95
|
classe 4
|
3
|
97
|
|
|
p=2
|
classe 9
|
classe4
|
|
classe 9
|
95.48
|
4.52
|
|
classe 4
|
4
|
96
|
(a)
a=10
|
classe 9
|
classe4
|
classe 9
|
96.04
|
3.95
|
classe 4
|
4
|
96
|
|
(b)
|
y=0.1
|
classe 9
|
classe4
|
|
classe 9
|
96.61
|
3.38
|
|
classe 4
|
4.5
|
95.50
|
(c)
|
p=3
|
classe 9
|
classe4
|
|
classe 9
|
96.04
|
3.95
|
|
classe 4
|
3.5
|
96.5
|
|
a =25
|
classe 9
|
classe4
|
|
classe 9
|
94.91
|
5.08
|
|
classe 4
|
3.5
|
96.5
|
|
y = 0.05
|
classe 9
|
classe4
|
|
classe 9
|
96.04
|
3.95
|
|
classe 4
|
4.5
|
95.5
|
|
a =6
et
y=0.2
|
classe 9
|
classe4
|
|
classe 9
|
95.48
|
4.51
|
|
classe 4
|
2.5
|
97.5
|
|
a =6
et
y=0.5
|
classe 9
|
classe4
|
|
classe 9
|
96.04
|
3.95
|
|
classe 4
|
3.50
|
96.50
|
(d)
|
Noyau
|
RBF
|
polynomial
|
Distance négative
|
KMOD
|
|
|
|
|
|
|
p=3
|
|
|
|
a=6
|
a=6
|
|
classe
|
a=3
|
a=10
|
a=25
|
p=1
|
p=2
|
|
y=0.2
|
y=0.1
|
y=0.05
|
et
|
et
|
|
|
|
|
|
|
|
|
|
|
y=0.5
|
y=0.2
|
|
9
|
94.91
|
96.04
|
94.91
|
94.91
|
95.48
|
96.04
|
96.04
|
96.61
|
96.04
|
96.04
|
95.48
|
|
4
|
96.50
|
96.00
|
96.50
|
96.50
|
96.00
|
96.50
|
97.00
|
95.50
|
95.50
|
96.50
|
97.50
|
|
TGBR
|
95.75
|
96.02
|
95.75
|
95.75
|
95.75
|
95.75
|
96.55
|
96.02
|
95.75
|
96.28
|
96.55
|
Tableau 3.2.Matrices de confusion pour les paires de classes (9
,4) pour chaque type de noyau (a) Polynomial (b) RBF (c) Distance
négative (d) KMOD
|
p=1
|
classe 5
|
classe6
|
|
classe 5
|
98.12
|
1.87
|
|
classe 6
|
5.29
|
94.70
|
|
a =3
|
classe 5
|
classe6
|
|
classe 5
|
98.75
|
1.25
|
|
classe 6
|
4.70
|
95.29
|
|
y = 0.2
|
classe 5
|
classe6
|
|
classe 5
|
98.75
|
1.25
|
|
classe 6
|
4.70
|
95.29
|
|
p=2
|
classe 5
|
classe6
|
|
classe 5
|
98.12
|
1.87
|
|
classe 6
|
4.70
|
95.29
|
(a)
a=10
|
classe 5
|
classe6
|
classe 5
|
98.12
|
1.87
|
classe 6
|
4.12
|
95.88
|
|
(b)
|
y=0.1
|
classe 5
|
classe6
|
|
classe 5
|
98.12
|
1.87
|
|
classe 6
|
5.29
|
94.70
|
(c)
|
p=3
|
classe 5
|
classe6
|
|
classe 5
|
99.37
|
0.62
|
|
classe 6
|
7.05
|
92.94
|
|
a =25
|
classe 5
|
classe6
|
|
classe 5
|
98.12
|
1.87
|
|
classe 6
|
4.7
|
95.29
|
|
y = 0.05
|
classe 5
|
classe6
|
|
classe 5
|
98.12
|
1.87
|
|
classe 6
|
4.11
|
95.88
|
|
a =6
et
y=0.2
|
classe 5
|
classe6
|
|
classe 5
|
98.75
|
1.25
|
|
classe 6
|
3.52
|
96.47
|
|
a =6
et
y=0.5
|
classe 5
|
classe6
|
|
classe 5
|
98.75
|
1.25
|
|
classe 6
|
3.52
|
96.47
|
|
p=1
|
classe 7
|
classe1
|
|
classe 7
|
99.31
|
0.68
|
|
classe 1
|
2.27
|
97.72
|
|
p=2
|
classe 7
|
classe1
|
|
classe 7
|
99.31
|
0.68
|
|
classe 1
|
2.65
|
97.34
|
(a)
|
p=3
|
classe 7
|
classe 1
|
|
classe 7
|
100
|
0
|
|
classe 1
|
2.65
|
97.34
|
(d)
|
Noyau
|
RBF
|
polynomial
|
Distance négative
|
KMOD
|
|
|
|
|
|
|
p=3
|
|
|
|
a=6
|
a=6
|
|
classe
|
a =3
|
a =10
|
a =25
|
p=1
|
p=2
|
|
y = 0.2
|
y = 0.1
|
y = 0.05
|
et
|
et
|
|
|
|
|
|
|
|
|
|
|
y=0.5
|
y=0.2
|
|
5
|
98.75
|
98.12
|
98.12
|
98.12
|
98.12
|
99.37
|
98.75
|
98.12
|
98.12
|
98.75
|
98.75
|
|
6
|
95.29
|
95.88
|
95.29
|
94.70
|
95.29
|
92.94
|
95.29
|
94.70
|
95.88
|
96.47
|
96.47
|
|
TGBR
|
96.96
|
96.96
|
96.66
|
96.36
|
96.66
|
96.06
|
96.96
|
96.36
|
96.96
|
97.57
|
97.57
|
Tableau 3.3.Matrices de confusion pour les paires de classes (5
,6) pour chaque type de noyau (a) Polynomial (b) RBF (c) Distance
négative (d) KMOD
|
a=3
|
classe 7
|
classe1
|
|
classe 7
|
100
|
0
|
|
classe 1
|
3.40
|
96.59
|
|
a=10
|
classe 7
|
classe1
|
|
classe 7
|
99.31
|
0.68
|
|
classe 1
|
2.66
|
97.34
|
|
a=25
|
classe 7
|
classe1
|
|
classe 7
|
99.31
|
0.68
|
|
classe 1
|
2.65
|
97.34
|
|
y=0.2
|
classe 7
|
classe1
|
|
classe 7
|
99.31
|
0.68
|
|
classe 1
|
3.40
|
96.59
|
(b)
|
y=0.1
|
classe 7
|
classe1
|
|
classe 7
|
99.31
|
0.68
|
|
classe 1
|
3.40
|
96.59
|
(c)
|
y=0.05
|
classe 7
|
classe1
|
|
classe 7
|
99.31
|
0.68
|
|
classe 1
|
3.40
|
96.59
|
|
a =6
et
y=0.2
|
classe 7
|
classe1
|
|
classe 7
|
100
|
0
|
|
classe 1
|
3.40
|
96.59
|
|
a =6
et
|
classe 7
|
classe1
|
|
y=0.5
|
|
|
|
classe 7
|
100
|
0
|
|
classe 1
|
3.40
|
96.59
|
(d)
|
Noyau
|
RBF
|
polynomial
|
Distance négative
|
KMOD
|
|
|
|
|
|
|
p=3
|
|
|
|
a=6
|
a=6
|
|
classe
|
a =3
|
a =10
|
a =25
|
p=1
|
p=2
|
|
y = 0.2
|
y = 0.1
|
y = 0.05
|
et
|
et
|
|
|
|
|
|
|
|
|
|
|
y=0.5
|
y=0.2
|
|
7
|
100
|
99.31
|
99.31
|
99.31
|
99.31
|
100
|
99.31
|
99.31
|
99.31
|
100
|
100
|
|
1
|
96.59
|
97.34
|
97.34
|
97.72
|
97.34
|
97.34
|
96.59
|
96.59
|
96.59
|
96.59
|
96.59
|
|
TGBR
|
97.81
|
98.05
|
98.05
|
98.29
|
98.05
|
98.29
|
97.56
|
97.56
|
97.56
|
97.81
|
97.81
|
Tableau 3 .4.Matrices de confusion pour les paires de classes (7
, 1) pour chaque type de noyau (a) Polynomial (b) RBF (c) Distance
négative (d) KMOD
3.4.3. Comparaison des résultats et
discussions
|
Noyau
|
RBF
|
Polynomial
|
Distance négative
|
KMOD
|
|
pairs
|
a=3
|
a=10
|
a=25
|
p=1
|
p=2
|
p=3
|
y=0.2
|
y=0.1
|
y=0.05
|
a=6
|
a=6
|
|
|
|
|
|
|
|
|
|
|
et
|
et
|
|
|
|
|
|
|
|
|
|
|
y=0.5
|
y=0.2
|
|
(9,4)
|
95.75
|
96.02
|
95.75
|
95.75
|
95.75
|
95.75
|
96.55
|
96.02
|
95.75
|
96.28
|
96.55
|
|
(5,6)
|
96.96
|
96.96
|
96.66
|
96.36
|
96.66
|
96.06
|
96.96
|
96.36
|
96.96
|
97.57
|
97.57
|
|
(7,1)
|
97.81
|
98.05
|
98.05
|
98.29
|
98.05
|
98.29
|
97.56
|
97.56
|
97.56
|
97.81
|
97.81
|
Tableau 3.5.Taux global de bonne reconnaissance pour les trois
paires de classes (9,4), (7,1) et (5,6).
D'une manière générale, les
résultats obtenus sont sensiblement similaires en termes de bonne
classification .Cependant, l'analyse comparative montre que le choix du noyau
dépend des paires de classes et des paramètres utilisés.
En effet nous avons constaté que les noyaux KMOD et Distance
négative ont les mêmes performances pour la paire (9,4) .Tandis
que le noyau Polynomial fournit le meilleurs taux pour la paire(7,1) .Pour la
paire (5,6) le noyau KMOD fournit le meilleurs taux de bonne reconnaissance.
3.5. Classification multi classe
3.5.1. Evaluations
Dans cette section, nous évaluons la classification
multi-classe en utilisant l'approche un contre tous pour les différents
noyaux et différents paramètres des noyaux.
Les matrices de confusion sont reportées dans les tableaux
suivants :
|
ó =3
|
zéro
|
Un
|
deux
|
trois
|
quatre
|
cinq
|
six
|
sept
|
huit
|
neuf
|
|
|
zéro
|
92.75
|
0
|
2.50
|
0.27
|
1.39
|
0.55
|
0.83
|
0.27
|
1.39
|
0
|
|
un
|
0
|
93.18
|
0.75
|
0
|
3.40
|
0
|
1.51
|
0
|
1.13
|
0
|
|
deux
|
1.01
|
0
|
84.34
|
2.02
|
3.53
|
1.51
|
1.01
|
0.50
|
6.06
|
0
|
|
trois
|
1.20
|
0
|
3.61
|
80.12
|
0.60
|
7.83
|
0
|
0
|
6.02
|
0.60
|
|
quatre
|
0
|
0.50
|
3.00
|
0
|
85.50
|
0
|
1.00
|
0.50
|
3.00
|
6.50
|
|
cinq
|
2.50
|
0
|
1.25
|
5.00
|
1.87
|
82.50
|
0
|
0
|
5.00
|
1.87
|
|
six
|
2.35
|
0
|
4.70
|
0
|
1.76
|
3.52
|
86.47
|
0
|
1.17
|
0
|
|
sept
|
0
|
0
|
2.04
|
0.68
|
6.12
|
0
|
0
|
80.27
|
4.08
|
6.80
|
|
huit
|
1.80
|
0
|
1.80
|
0
|
1.20
|
3.61
|
0
|
0
|
90.96
|
0.60
|
|
neuf
|
0
|
0
|
0.56
|
0
|
3.38
|
0
|
0
|
0.56
|
2.25
|
93.22
|
|
TGBR
|
|
87.84
|
Tableau 3 .6.Matrice de confusion de la classification multi
classe pour le noyau RBF (ó =3)
|
ó =10
|
zéro
|
Un
|
deux
|
trois
|
quatre
|
cinq
|
six
|
sept
|
huit
|
neuf
|
|
|
zéro
|
89.69
|
0
|
5.01
|
1.39
|
1.39
|
1.11
|
0.27
|
0
|
0.27
|
0.83
|
|
un
|
0
|
95.07
|
0.37
|
0
|
3.40
|
0
|
0.37
|
0
|
0.37
|
0.37
|
|
deux
|
1.51
|
0
|
80.30
|
3.53
|
7.07
|
2.02
|
0.50
|
0.50
|
4.54
|
0
|
|
trois
|
1.20
|
0
|
3.01
|
83.73
|
1.20
|
3.61
|
0
|
0
|
3.61
|
3.61
|
|
quatre
|
0.50
|
0.50
|
2.00
|
0
|
87.00
|
0.50
|
0.50
|
1.00
|
3.00
|
5.00
|
|
cinq
|
2.50
|
0
|
3.12
|
10.62
|
3.12
|
73.75
|
0.62
|
1.25
|
3.75
|
1.25
|
|
six
|
2.35
|
0
|
7.05
|
0
|
4.11
|
6.47
|
77.64
|
0.58
|
1.17
|
0.58
|
|
sept
|
0.68
|
0
|
2.72
|
2.72
|
6.12
|
0
|
0
|
79.59
|
1.36
|
6.80
|
|
huit
|
3.01
|
1.20
|
2.40
|
3.61
|
5.42
|
4.81
|
0
|
1.80
|
74.09
|
3.61
|
|
neuf
|
0
|
0
|
0.56
|
0
|
6.21
|
0.56
|
0
|
1.12
|
2.25
|
89.26
|
|
TGBR
|
|
84.35
|
Tableau 3 .7.Matrice de confusion de la classification multi
classe le noyau RBF (ó = 10)
|
ó =25
|
zéro
|
Un
|
deux
|
trois
|
quatre
|
cinq
|
six
|
sept
|
huit
|
neuf
|
|
|
zéro
|
90.25
|
0
|
3.89
|
1.94
|
1.39
|
0.27
|
0.83
|
0
|
1.11
|
0.27
|
|
un
|
0
|
95.83
|
0
|
0.75
|
1.89
|
0
|
1.13
|
0
|
0.37
|
0
|
|
deux
|
2.02
|
0
|
78.78
|
7.07
|
6.56
|
1.01
|
0.50
|
0.50
|
3.53
|
0
|
|
trois
|
2.40
|
0
|
2.40
|
86.14
|
1.20
|
4.81
|
0
|
0
|
2.40
|
0.60
|
|
quatre
|
0
|
1.5
|
3
|
0
|
86.00
|
0
|
1.00
|
0
|
4.50
|
4.00
|
|
cinq
|
1.87
|
0.62
|
5.00
|
12.50
|
1.87
|
72.50
|
0.62
|
0
|
3.75
|
1.25
|
|
six
|
2.35
|
0
|
7.64
|
0
|
3.52
|
3.52
|
81.17
|
0
|
1.76
|
0
|
|
sept
|
0.68
|
0.68
|
2.04
|
2.72
|
6.80
|
0
|
0
|
74.82
|
7.72
|
9.52
|
|
huit
|
3.61
|
1.80
|
3.01
|
3.61
|
4.21
|
2.40
|
0
|
1.20
|
78.91
|
1.20
|
|
neuf
|
0
|
1.12
|
1.12
|
1.12
|
5.64
|
1.12
|
0
|
0.56
|
2.25
|
87.00
|
|
TGBR
|
|
84.55
|
Tableau 3.8.Matrice de confusion de la classification multi
classe le noyau RBF (ó =25)
|
P=1
|
zéro
|
Un
|
deux
|
trois
|
quatre
|
cinq
|
six
|
sept
|
huit
|
neuf
|
|
|
zéro
|
89.41
|
0
|
3.89
|
0.55
|
1.11
|
2.78
|
1.11
|
0.55
|
0.55
|
0
|
|
un
|
0
|
95.07
|
0
|
0
|
2.27
|
0
|
1.51
|
0.37
|
0.75
|
0
|
|
deux
|
1.01
|
0
|
72.72
|
2.52
|
8.08
|
2.52
|
4.04
|
3.03
|
6.06
|
0
|
|
trois
|
1.80
|
0
|
3.01
|
68.07
|
0.60
|
13.25
|
0.60
|
1.20
|
9.03
|
2.40
|
|
quatre
|
0.50
|
1.00
|
1.00
|
0
|
81.50
|
3.50
|
1.50
|
2.50
|
4.50
|
4.00
|
|
cinq
|
3.75
|
0
|
0
|
5
|
1.25
|
83.75
|
0
|
2.5
|
2.5
|
1.25
|
|
six
|
2.35
|
0
|
2.35
|
0
|
2.94
|
7.64
|
82.35
|
0.58
|
1.76
|
0
|
|
sept
|
1.36
|
0
|
1.36
|
0.68
|
3.40
|
1.36
|
0
|
87.07
|
1.36
|
3.40
|
|
huit
|
4.21
|
0
|
0.60
|
0.60
|
3.61
|
9.63
|
0
|
2.40
|
77.10
|
1.80
|
|
neuf
|
0
|
0.56
|
1.12
|
0
|
5.64
|
2.25
|
0
|
5.08
|
6.77
|
78.53
|
|
TGBR
|
|
82.76
|
Tableau 3.9.Matrice de confusion de la classification multi
classe pour le noyau Polynomial (p=1)
|
P=2
|
zéro
|
Un
|
deux
|
trois
|
quatre
|
cinq
|
six
|
sept
|
huit
|
neuf
|
|
|
zéro
|
89.97
|
0
|
3.06
|
0.83
|
1.67
|
2.78
|
1.11
|
0
|
0.55
|
0
|
|
un
|
0
|
95.45
|
0
|
0
|
3.03
|
0
|
1.13
|
0
|
0.37
|
0
|
|
deux
|
1.51
|
0
|
73.23
|
3.03
|
7.57
|
2.52
|
4.04
|
1.01
|
7.07
|
0
|
|
trois
|
3.61
|
0
|
2.40
|
73.49
|
0.60
|
10.24
|
0
|
0
|
8.43
|
1.20
|
|
quatre
|
0.50
|
1.00
|
1.50
|
0
|
83.50
|
1.50
|
1.50
|
0
|
3.00
|
7.50
|
|
cinq
|
3.12
|
0
|
0.62
|
5.00
|
1.87
|
85.00
|
0
|
0.62
|
2.50
|
1.25
|
|
six
|
0.58
|
0
|
2.35
|
0
|
3.52
|
8.82
|
82.35
|
0
|
2.35
|
0
|
|
sept
|
0
|
0
|
2.04
|
0.68
|
4.76
|
1.36
|
0
|
78.23
|
2.04
|
10.88
|
|
huit
|
3.61
|
1.20
|
0
|
1.20
|
2.40
|
9.63
|
0
|
1.20
|
78.91
|
1.80
|
|
neuf
|
0
|
0.56
|
0.56
|
0
|
5.08
|
1.69
|
0
|
0.56
|
3.95
|
87.57
|
|
TGBR
|
|
84.01
|
Tableau 3.1 0.Matrice de confusion de la classification multi
classe pour le noyau Polynomial (p=2)
|
P=3
|
zéro
|
Un
|
deux
|
trois
|
quatre
|
cinq
|
six
|
sept
|
huit
|
neuf
|
|
|
zéro
|
92.47
|
0
|
2.50
|
1.11
|
1.39
|
0.55
|
0.83
|
0.27
|
0
|
0.83
|
|
un
|
0
|
95.83
|
0
|
0
|
2.65
|
0
|
1.13
|
0
|
0.37
|
0
|
|
deux
|
2.02
|
0
|
77.27
|
3.53
|
6.56
|
1.51
|
4.04
|
1.51
|
3.53
|
0
|
|
trois
|
2.40
|
0
|
2.40
|
80.12
|
0.60
|
6.02
|
0.60
|
0
|
4.21
|
3.61
|
|
quatre
|
1.00
|
1.00
|
2.00
|
0
|
82.50
|
1.00
|
1.50
|
1.00
|
2.00
|
8.00
|
|
cinq
|
1.87
|
0
|
1.25
|
9.37
|
1.87
|
79.37
|
0.62
|
1.25
|
1.87
|
2.5
|
|
six
|
2.35
|
0
|
2.35
|
0
|
4.70
|
3.52
|
85.88
|
0.58
|
0.58
|
0
|
|
sept
|
0
|
0
|
2.04
|
0.68
|
4.08
|
1.36
|
0
|
82.99
|
0.68
|
8.16
|
|
huit
|
4.81
|
0.60
|
1.80
|
1.80
|
4.21
|
7.83
|
0.60
|
2.40
|
71.08
|
4.81
|
|
neuf
|
0
|
0.56
|
0.56
|
0
|
3.38
|
1.12
|
0
|
0.56
|
2.25
|
91.52
|
|
TGBR
|
|
85.25
|
Tableau 3.11 .Matrice de confusion de la classification multi
classe pour le noyau Polynomial (p=3)
|
ã=0.2
|
zéro
|
Un
|
deux
|
trois
|
quatre
|
cinq
|
six
|
sept
|
huit
|
neuf
|
|
|
zéro
|
93.31
|
0
|
3.34
|
0.27
|
1.11
|
0.27
|
0.83
|
0.83
|
0
|
0
|
|
un
|
0
|
95.83
|
0
|
0
|
2.27
|
0
|
1.51
|
0.37
|
0
|
0
|
|
deux
|
1.51
|
0
|
86.86
|
2.52
|
3.53
|
1.51
|
1.01
|
2.02
|
1.01
|
0
|
|
trois
|
1.80
|
0
|
3.61
|
86.74
|
0.60
|
5.42
|
0.60
|
0
|
0
|
1.20
|
|
quatre
|
0
|
1.50
|
5.00
|
0
|
85.50
|
0
|
1.00
|
2.50
|
0
|
4.50
|
|
cinq
|
1.87
|
0
|
3.12
|
10.62
|
1.87
|
78.75
|
0.62
|
1.87
|
0
|
1.25
|
|
six
|
2.94
|
0
|
5.29
|
0
|
2.35
|
2.94
|
86.47
|
0
|
0
|
0
|
|
sept
|
0.68
|
0.68
|
2.72
|
0.68
|
3.40
|
0
|
0
|
88.43
|
0
|
3.40
|
|
huit
|
2.40
|
1.80
|
6.62
|
8.43
|
7.83
|
8.43
|
0
|
3.61
|
56.02
|
4.81
|
|
neuf
|
0.56
|
0.56
|
1.12
|
0.56
|
5.64
|
0.56
|
0
|
3.38
|
6.77
|
78.53
|
|
TGBR
|
|
86.00
|
Tableau 3.1 2.Matrice de confusion de la classification multi
classe pour le noyau KMOD ã =0.2 et ó =6
|
ã =0.5
|
zéro
|
Un
|
deux
|
trois
|
quatre
|
cinq
|
six
|
sept
|
huit
|
neuf
|
|
|
zéro
|
93.87
|
0
|
1.67
|
0.55
|
1.11
|
0.55
|
0.55
|
0.55
|
0
|
1.11
|
|
un
|
0
|
93.81
|
0
|
1.13
|
1.89
|
0
|
2.27
|
0.37
|
0
|
1.13
|
|
deux
|
2.52
|
0
|
78.28
|
5.05
|
5.55
|
2.02
|
1.51
|
2.52
|
2.02
|
0.50
|
|
trois
|
1.20
|
0
|
2.40
|
87.34
|
0.60
|
6.02
|
0
|
0
|
0
|
2.40
|
|
quatre
|
0.50
|
0.50
|
2.50
|
0
|
81.50
|
1.00
|
1.00
|
2
|
0
|
10.00
|
|
cinq
|
2.50
|
0
|
1.25
|
8.75
|
1.87
|
80.62
|
0
|
1.87
|
0.62
|
2.50
|
|
six
|
3.52
|
0
|
3.52
|
0
|
2.35
|
4.70
|
85.88
|
0
|
0
|
0
|
|
sept
|
0
|
0
|
0.68
|
0.68
|
3.40
|
0
|
0
|
89.79
|
0
|
5.44
|
|
huit
|
4.81
|
0
|
0.60
|
7.22
|
4.21
|
8.43
|
0
|
3.01
|
63.25
|
8.43
|
|
neuf
|
0.56
|
0
|
0.56
|
0
|
2.25
|
0.56
|
0
|
2.25
|
0
|
93.78
|
|
TGBR
|
|
85.89
|
Tableau 3.13 .Matrice de confusion de la classification multi
classe pour le noyau KMOD ã =0.5 et ó =6
|
ã=0.2
|
zéro
|
un
|
deux
|
trois
|
quatre
|
cinq
|
six
|
sept
|
huit
|
neuf
|
|
|
zéro
|
90.25
|
0
|
1.94
|
0.83
|
1.39
|
3.06
|
1.67
|
0
|
0.83
|
0
|
|
un
|
0
|
93.93
|
0
|
0
|
2.27
|
0
|
1.51
|
0
|
1.51
|
0.75
|
|
deux
|
2.02
|
0
|
68.68
|
3.03
|
7.57
|
2.02
|
3.53
|
1.01
|
12.12
|
0
|
|
trois
|
2.40
|
0
|
1.20
|
75.90
|
1.20
|
5.42
|
0.60
|
0.60
|
10.24
|
2.40
|
|
quatre
|
1.00
|
0.50
|
0.50
|
0
|
84.00
|
0
|
3.00
|
1.00
|
5.00
|
5.00
|
|
cinq
|
3.12
|
0
|
1.25
|
10
|
3.12
|
74.37
|
0
|
1.25
|
5.00
|
1.87
|
|
six
|
0.58
|
0
|
1.17
|
0
|
2.94
|
7.64
|
85.29
|
0
|
2.35
|
0
|
|
sept
|
0.68
|
0
|
1.36
|
1.36
|
4.76
|
0
|
0
|
82.31
|
4.08
|
5.44
|
|
huit
|
3.01
|
0
|
0
|
1.80
|
0.60
|
3.61
|
0
|
0
|
90.36
|
0.60
|
|
neuf
|
0
|
0.56
|
0
|
0
|
3.95
|
1.12
|
0
|
0.56
|
8.47
|
85.31
|
|
TGBR
|
|
84.10
|
Tableau 3.14.Matrice de confusion de la classification multi
classe pour le noyau Distance négativeã =0.2
|
ã=0.1
|
zéro
|
un
|
deux
|
trois
|
quatre
|
cinq
|
six
|
sept
|
huit
|
neuf
|
|
|
zéro
|
91.36
|
0
|
3.62
|
0.55
|
1.11
|
0.27
|
2.22
|
0
|
0.27
|
0.55
|
|
un
|
0
|
95.45
|
0
|
0
|
2.27
|
0
|
1.51
|
0
|
0
|
0.75
|
|
deux
|
1.51
|
0
|
77.27
|
4.04
|
6.06
|
1.51
|
4.04
|
2.02
|
3.03
|
0.50
|
|
trois
|
2.40
|
0
|
1.20
|
77.10
|
2.40
|
7.22
|
0.60
|
1.20
|
3.01
|
4.81
|
|
quatre
|
0.50
|
0.50
|
1.50
|
0
|
82.00
|
0
|
4.00
|
0.50
|
1.00
|
10.00
|
|
cinq
|
4.37
|
0
|
2.50
|
12.50
|
3.12
|
71.25
|
0.62
|
0.62
|
2.50
|
2.50
|
|
six
|
1.17
|
0
|
2.35
|
0
|
2.94
|
5.29
|
87.64
|
0
|
0.58
|
0
|
|
sept
|
0
|
0
|
1.36
|
0
|
4.08
|
0
|
0
|
87.07
|
0.68
|
6.80
|
|
huit
|
5.42
|
1.80
|
3.61
|
1.80
|
4.21
|
7.83
|
0
|
1.20
|
71.08
|
3.01
|
|
neuf
|
0
|
0
|
0.56
|
0
|
3.38
|
0.56
|
0
|
1.12
|
1.12
|
93.22
|
|
TGBR
|
|
84.65
|
Tableau 3. 15.Matrice de confusion de la classification multi
classe pour le noyau Distance négative ã=0.1
|
ã =0.05
|
zéro
|
un
|
deux
|
trois
|
quatre
|
cinq
|
six
|
sept
|
huit
|
neuf
|
|
|
zéro
|
92.75
|
0
|
1.39
|
0.83
|
1.11
|
0.27
|
2.22
|
0.55
|
0.27
|
0.55
|
|
un
|
0
|
93.93
|
0
|
0.75
|
1.51
|
0
|
3.03
|
0
|
0
|
0.75
|
|
deux
|
2.52
|
0
|
69.19
|
7.57
|
7.07
|
1.01
|
6.06
|
3.03
|
3.03
|
0.50
|
|
trois
|
1.80
|
0
|
1.20
|
86.74
|
0.60
|
3.61
|
0.60
|
1.80
|
0.60
|
3.01
|
|
quatre
|
1.00
|
0.50
|
1.00
|
0
|
84.00
|
0
|
3.00
|
1.50
|
0.50
|
8.50
|
|
cinq
|
4.37
|
0
|
1.25
|
13.12
|
2.50
|
75.00
|
0
|
1.25
|
0
|
2.50
|
|
six
|
2.35
|
0
|
0
|
0.58
|
2.94
|
5.29
|
88.82
|
0
|
0
|
0
|
|
sept
|
0.68
|
0
|
1.36
|
0.68
|
4.08
|
0
|
0
|
89.11
|
0
|
4.08
|
|
huit
|
4.81
|
0.60
|
0.60
|
7.83
|
7.22
|
7.22
|
0.60
|
1.20
|
66.26
|
3.61
|
|
neuf
|
0.56
|
0
|
0.56
|
0
|
5.64
|
1.12
|
0
|
1.69
|
0.56
|
89.83
|
|
TGBR
|
|
84.75
|
Tableau 3.16.Matrice de confusion de la classification multi
classe pour le noyau Distance négative ã=0.05
3.5.2. Comparaison des résultats et
discussions
|
noyau
|
RBF
|
polynomial
|
Distance négative
|
KMOD
|
|
classe
|
|
|
|
|
|
|
|
|
|
ã = 0.5
|
ã = 0.2
|
|
ó=3
|
ó=10
|
ó=25
|
p=1
|
p=2
|
p=3
|
ã=0.2
|
ã=0.1
|
ã=0.05
|
ó=6
|
ó=6
|
|
0
|
92.75
|
89.69
|
90.25
|
89.41
|
89.97
|
92.47
|
90.25
|
91.36
|
92.75
|
93.87
|
93.31
|
|
1
|
93.18
|
95.07
|
95.83
|
95.07
|
95.45
|
95.83
|
93.93
|
95.45
|
93.93
|
93.18
|
95.83
|
|
2
|
84.34
|
80.30
|
78.78
|
72.72
|
73.23
|
77.27
|
68.68
|
77.27
|
69.19
|
78.28
|
86.86
|
|
3
|
80.12
|
83.73
|
86.14
|
68.07
|
73.49
|
80.12
|
75.90
|
77.10
|
86.74
|
87.34
|
86.74
|
|
4
|
85.50
|
87.00
|
86.00
|
81.50
|
83.50
|
82.50
|
84.00
|
82.00
|
84.00
|
81.50
|
85.50
|
|
5
|
82.50
|
73.75
|
72.50
|
83.75
|
85.00
|
79.37
|
74.37
|
71.25
|
75.00
|
80.62
|
78.75
|
|
6
|
86.47
|
77.64
|
81.17
|
82.35
|
82.35
|
85.88
|
85.29
|
87.64
|
88.82
|
85.88
|
86.47
|
|
7
|
80.27
|
79.59
|
74.82
|
87.07
|
78.23
|
82.99
|
82.31
|
87.07
|
89.11
|
89.79
|
88.43
|
|
8
|
90.96
|
74.09
|
78.91
|
77.10
|
78.91
|
71.08
|
90.36
|
71.08
|
66.26
|
63.25
|
56.02
|
|
9
|
93.22
|
89.26
|
87.00
|
78.53
|
87.57
|
91.52
|
85.31
|
93.22
|
89.83
|
93.78
|
87.57
|
|
TGBR
|
87.84
|
84.35
|
84.55
|
82.76
|
84.01
|
85.25
|
84.10
|
84.65
|
84.75
|
85.89
|
86.00
|
Tableau 3. 17.Résumé des résultats pour la
classification multi classe
Globalement, les taux de bonne reconnaissance sont
sensiblement similaires. Cependant, nous constatons que le choix du noyau et
ses paramètres influent sur le taux de bonne de reconnaissance .Le noyau
RBF pour ó =3 semble fournir les meilleurs taux de bonne de
reconnaissance comparativement aux autres noyaux. L'examen du taux de bonne de
reconnaissance pour chaque classe montre qu'il n'existe pas un noyau plus
favorable .En fait les résultats obtenus dépendent des
classes.
Nous présentons dans les figures suivantes le taux de
bonne de reconnaissance pour chaque classe et pour différentes valeurs
du paramètre du noyau.
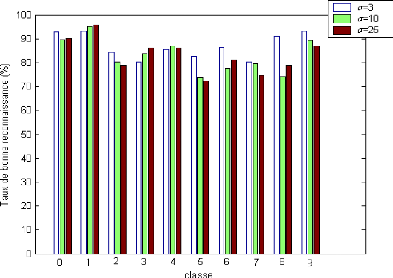
Figure 3.3.Taux de bonne reconnaissance (%) pour chaque classe
pour différents valeurs du
paramètre du noyau RBF.
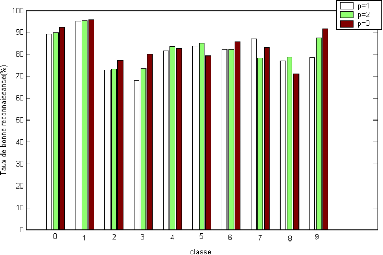
Figure 3.4.Taux de bonne reconnaissance (%) pour chaque classe
pour différents valeurs du
paramètre du noyau Polynomial.
Chapitre 3 Résultats expérimentaux
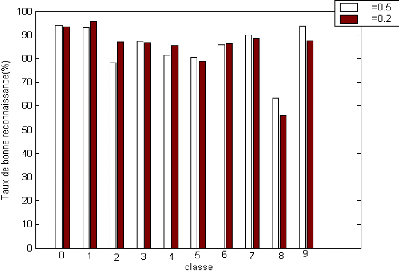
Y Y
Figure 3.5.Taux de bonne reconnaissance (%) pour chaque classe
pour différents valeurs du
paramètre du noyau KMOD (a
=6)
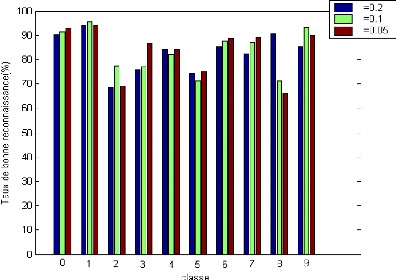
Y Y Y
Figure 3.6.Taux de bonne reconnaissance (%) pour chaque classe
pour différents valeurs du
paramètre du noyau Distance
négative
3.6. Comparaison classification binaire et
multi-classe
L'analyse comparative entre la classification binaire et la
classification multi-classe montre que le taux de bonne reconnaissance pour la
classification binaire est meilleur quelques soit le noyau utilisé
comparativement à la classification multi-classe. Cela peut se justifier
par le fait que le classifieur SVM a beaucoup plus de difficultés
à séparer une classe des autres classes comparativement à
la classification binaire.
3.7. Présentation de la plateforme
Nous présentons dans cette section la plate forme de
reconnaissance de chiffres manuscrits implémentés sous
environnement Matlab .Les différentes fonctions
implémentés sont décrits dans les sous- sections
suivants.
3.7.1. Fenêtre principale
La fenêtre principale est composée (voir figure3.7)
de trois menus :
· Fichier,
· Apprentissage
· Test.
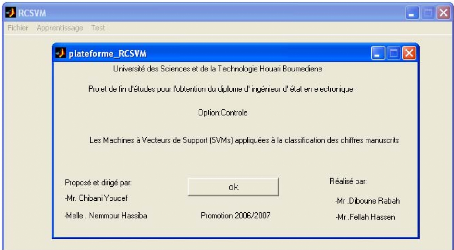
Figure 3.7. Fenêtre principale
3.7.2 Menu
3.7.2.1. Sélection des fichiers (voir figure3.8)
Le menu Fichier contient trois rubriques :
> Ouvrir la base d 'apprentissage : permet de
sélectionner le fichier sur lequel porte l'apprentissage des SVMs .La
sélection porte sur (voir figure3.9) :
· Le nom du fichier de données
· Le nom du fichier des classes
· Nombres d'images
· Hauteur de l'image
· Largeur de l'image
> Ouvrir la base de test : permet d'ouvrir la base
de test et les classes correspondantes
>
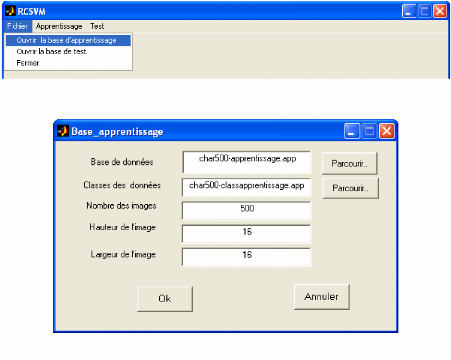
Figure 3.8. Rubriques de menu Fichier
Figure 3.9. Exemple de chargement de la base d'apprentissage.
Fermer : sert à quitter la plateforme.
3.7.2.2. Sélection des paramètres pour
l'apprentissage (voir figure3.10) Le menu Apprentissage
contient deux rubriques :
> Svm multiclasse : permet de faire la classification
multi-classe par le choix du noyau et le réglage de ses
paramètres (figure3.11)
> Svm biclasse : permet de faire la classification bi-classe
entre deux classes choisis en sélectionnant le noyau et ses
paramètres (figure3.12).
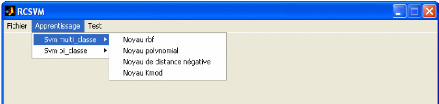
Figure 3.10. Rubriques de menu Apprentissage.
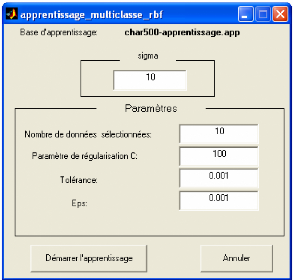
Figure 3.11. Exemple de choix de noyau et les paramètres
pour la classification multiclasse
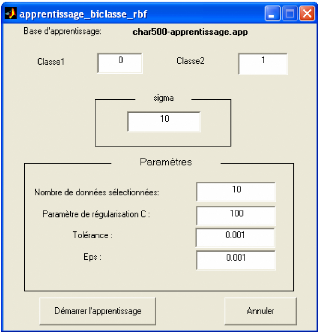
Figure 3.12. Exemple de choix de noyau et réglage des
paramètres avec possibilité de
sélectionner deux
classes pour la classification biclasse.
3.7.2.3. Evaluation de la classification (voir figure
3.13)
Le menu Test contient deux rubriques :
> Test binaire : permet d'afficher la matrice de confusion et
la précision globale pour la classification biclasse.
> Test multi : permet pour la classification multiclasse :
+ De calculer la matrice de confusion et la précision
globale (voir figure 3.14).
+ D'afficher le taux de bonne reconnaissance de
déférentes classes avec leur graphe (voir figure 3.15).
+ D'afficher le taux de bonne reconnaissance de
déférentes classes sous forme d'une matrice de confusion et
graphique avec la précision globale. (voir figure 3.16).
+ De récapituler tous les résultats obtenus avec
les paramètres utilisés et d'afficher le temps d'apprentissage et
le temps de test (voir figure 3.17).
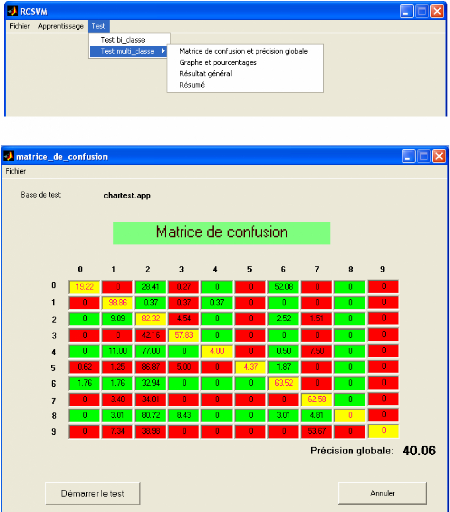
Figure 3.13. Rubriques de menu Test.
Figure 3.14.Matrice de confusion avec précision
globale.
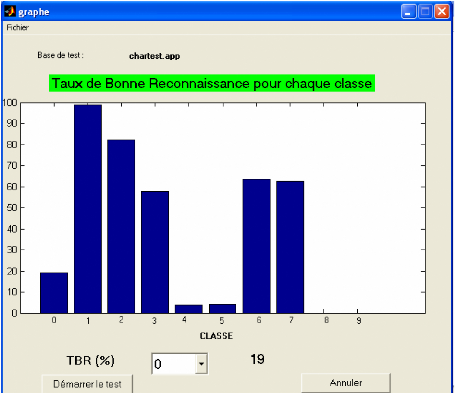
Figure 3.15. Taux de bonne reconnaissance pour chaque classe
représenté sous forme
graphique
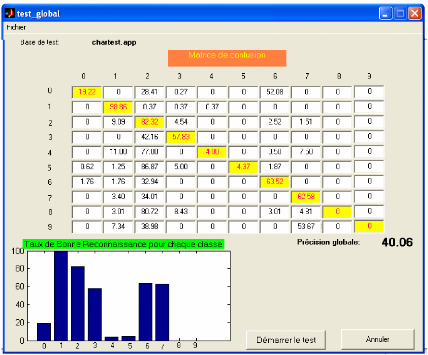
Figure 3.16. Taux de bonne reconnaissance pour
déférentes classes représenté sous forme
d'une
matrice de confusion et graphique.
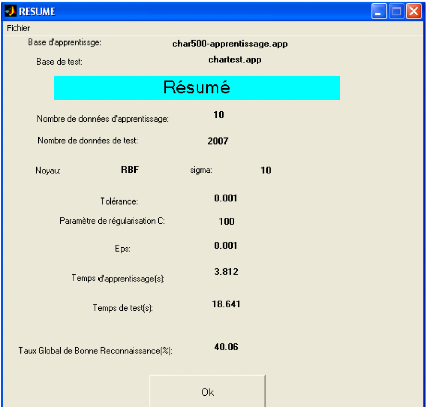
Figure 3.1 7.Résumé des résultats
3.8. Conclusion
Ce chapitre a été consacré à
l'évaluation du classifieur SVM pour la reconnaissance des chiffres
manuscrits. Les résultats obtenus montrent que la qualité de la
reconnaissance dépend du choix du noyau et du réglage de ses
paramètres.
Par ailleurs, nous avons pu constater que la séparation
bi-classe permet de séparer plus facilement deux classes que de
séparer une classe des autres classes.
CONCLUSION GENERALE
L'objectif de ce travail est l'étude et
l'implémentation des machines à vecteurs de support ou SVMs
(Support Vector Machines) pour la reconnaissance des chiffres manuscrits.
En général, la plupart des méthodes
d'apprentis sage machine comme réseau de neurones possèdent un
grand nombre de paramètres d'apprentissage à fixer par
l'utilisateur. En contrepartie, la formulation élégante de
SVM laisse très peu de place aux paramètres
utilisateurs.
Différents algorithme d'optimisation sont disponibles
parmi eux l'algorithme SMO (optimisation minimale et séquentielle du
risque) qui est un algorithme simple et rapide proposé pour
résoudre le problème de programmation quadratique des SVMs
sans la nécessité de stocker une grande matrice en
mémoire et sans une routine numérique itérative pour
chaque sous-problème.
La méthode des SVM que nous avons
implémentée a été testée sur des chiffres
manuscrits d'une base standard (USPS) avec 500 chiffres pour l'apprentissage et
2007 pour le test en considérant deux stratégies un pour binaire
entre deux classes les plus fréquemment confondues et l'autre pour multi
classe avec l'approche un contre tous et en essayant dans les deux
stratégies différents types de noyaux.
Les résultats obtenus montrent que la classification
binaire permet de fournir des résultats meilleurs comparativement
à la classification multi-classe.
Nous pensons que ce travail peut être
complété par l'évaluation sur d'autres bases de
données ainsi que sur d'autres types de noyaux. En outre les
méthodes d'extraction des caractéristiques peuvent être
envisagées pour améliorer le taux de bonne reconnaissance
notamment avec la stratégie multi-classe.
REFERENCES BIBLIOGRAPHIQUES
[1] A. Belaid, et Y. Brlaid, 1992. << Reconnaissance
des formes. Méthodes et application >> ; P 14 - 17.
[2] A. El Yacoubi, J-M Bertille, M Gilloux, et G Lorette,
1994. << Techniques de prétraitement pour la reconnaissance
offline des mots manuscrits sans contrainte >> Service de Recherche
de la Poste SRTP/RD/RVA; Nante, France ; CNED'94; P 3 15-321.
[3] C. Olivier, O. Colot, et P. Courtellemont, 1995. <<
Choix de paramètres pertinents pour la reconnaissance de chiffres
manuscrits >> ; La3i-LACI UFR des Sciences, Université de
Rouen, France ; CNED'94 ; P 27.
[4] C. Tappert, C. Y. Suen, and T. Wakahana, 1990. The
state of the art in on-line handwrittin grecognition. IEEE Transaction on
Pattern Analysis and Machine Intelligence,vol. 12, pp. 787-807.
[5] C.-W.HsuandC. and -J.Lin.A, 2002. comparison of methods
for multiclass support vector machines. IEEE Tran-sactionsonNeuralNetworks,
13:41 5-425.
[6] D. Brucq, K. Romeo, M. Lachkar, N. Feray, et F. Bagui,
1982. << Une méthode d'évaluation du codage en
reconnaissance de chiffres manuscrits >> ; UFR des Sciences et des
Techniques, Mont-Saint-Aignan, France; CNED'94 ; P 19-20.
[7] Choksuriwong, H.LaurentB, 2005. Etude Comparative de
Descripteurs Invariants d'Objets A Comparative Study of Objects Invariant
DescriptorsA. Emile ENSI de Bourges Universite d'Orleans
LaborateVisionetRobotique.
[8]F. Ali and Th. Pavlidis, 1977. Syntactic Recognition of
handwritten Numerals. IEEETransaction on Systems, Man and Cybernetics,
vol. n°7, pp. 537-541.
[9] G. Lorette, et Y. Lecourtier, 1992. «
Reconnaissance et interprétation de textes manuscrits hors-ligne : un
problème d 'analyse de scène ? » ; Université de
Rennes 1 Campus de Beaulieu ; Mont Saint Aignan ; CNED'92 ; P 109-126.
[10] Hanoi, 15 juillet 2005. Réseaux de neurones
pour la reconnaissance des formes
[11] H. S. Baird, 1993. << Recognition technology
frontiers >> ; AT&T Bell Laboratoires, USA ; CNED'94 ; P 327.
[12]
http://www.clopinet.com/isabelle/
Projects/SVM/applist.html.
[13] J. Bromley, and E. Sackinger, 1991. .Neural-network
and k-nearest-neighbor classifiers.
Technical Report 11359-910819-1 6TM,ATT.
[14] J. Mantas, 1985. « An overview of character
recognition methodologies >> ; National Centre of Medical
Documentation, Greece ; CNED'94 ; P 425-427.
[15] J. Callut, 2002 <<Implémentation
efficace des Support Victor Machines pour la classification».
Mémoire présenté en vue de l'obtention du grade de
Maître en Informatique.
[16] L. Likforman-Sulem, et C. Faure, 1995. << Une
méthode de résolution des conflits d'alignements pour la
segmentation des documents manuscrits >> ; Télécom
Paris /SIG,CNRS URA 820 Paris, France ; CNED'94 ; P 265.
[17] M. Gilloux, 1994. << Reconnaissance de
chiffres manuscrits par modèle de Markov pseudo-2D >> ;
Service de Recherche Technique de la Poste, SRTP/RD/RVA , Nante, France ;
CNED'94 ; P 11-13.
[18] M.NGHIEM Anh Tuan, 2005.
<<Reconnaissance d'écriture manuscrite
>>.
[19] M. H.Thien, M. Zimmermann, and H. Bunke, 1997.
« Off-line handwritten numeral string recognition by combining
segmentation-base and segmentation-free methods »; University of
Berne, Institut fur Informatik and Mathematik, Neubruckstr, Switzerland ;
CNED'94 ; P 257-25 8.
[20] N. Ayat, 2003. << Sélection de
modèle automatique des machines à vecteurs de support
>> application à la reconnaissance d'images de chiffres
manuscrits. Thèse présentée à l'école de
technologie supérieure, Montréal,Canada.
[21] J. C. Platt, 1998, Fast Training of Support Vector
Machines using Sequential Minimal Optimization, SMO-Book, chap. 12, p.
41-65, In B. Schölkopf, C. J. C. Burges, A. J. Smola, editors, Advance in
Kernel Methods - Support Vector Learning, Cambridge, MA, 1998, MIT Press.
[22] P. Telmosse, and R. Palmondon, 1998. «
Caractérisation et classification de nombres manuscrits par
méthodes statistique » Ecole polytechnique de Montréal,
Laboratoire SCRIBENS ; IPAR '86 ; P 871-873.
[23] S.V. Rice, G.Nagy, and T. A. Nartker 1999. <<
Optical Charcater Recognition: An illustrated guide to the frontier »,
Kluwer Academic Publishers.
[24] R.W. Smith, « Computer processing offline
images : A survey* » ; Departement of Computer Science, Queens
Building, University of Bristol, University Walk, Bristol, BS8ITR, U.K ;CNED'94
; P 8
[25] S. Njah , A. Triki et A. M.Alimi, Novembre1998, <<
Système de reconnaissance de code postal >> 18 éme
Conférence Tunisienne d'Electrotechnique et d'Automatique, , Hammamet,
Tunisie.
[26] S. Mori, K. Yamamoto, Member IEEE, and M.Yasuda, Member
IEEE, 1992. << Research on machine recognition of hand printed
characters >>.
[27]V.Vapnik, 1995 .the nature of statistical learning
throry. springer_verlag,New_York,USA.
V. K. Govindan, 1990. <<
Character recognition - A review >> ; Department of Electrical
communication engineering, India ; CNED'94 ; P 671-672.
[29] Vincent Rialle ,2000. Évaluation des
systèmes d'aide à la décision- courte introduction.
Maître de conférences en informatique. Article de recherche.
[30]Y.LeCun,B.Boser, J.S.Denker, D.Henderson, R.E.Howard,
W.Hubbard, and L.D.Jackel . 1 989Backpropagation applied to handwritten zip
code recognition. Neural Computation, vol 1, N : 4, pp.541-551.


. (
)
|
|
Support Vector Machines (SVMs)
|
"
|
|
|
|
"
|
|
( SVM ) .
. i (USPS)
Abstract

In this work, we are interested in a new method of
training and classification based on artificial training theory of Vapnik. This
method named Support Vector Machines (SVMs) has been adapted and applied to a
problem of the handwritten number recognition. The advantage of SVMs is that a
restricted number of samples is sufficient to the determination of the vectors
support (SVs) allowing discrimination between the classes comparatively to the
statistical estimation. Obtained results on image of USPS base are satisfactory
and very encouraging.
Key words: training,
classification, support vector machines (SVMs), handwritten number
recognition.
Résumé
Dans ce travail, nous nous intéressons à une
nouvelle méthode d'apprentissage et de classification basée sur
la théorie de l'apprentissage artificiel de Vapnik. Cette méthode
appelée les Machines à Vecteurs de Support (SVMs pour Support
Vector Machines) a été adaptée et appliquée au
problème de la reconnaissance des chiffres manuscrits. L'avantage des
SVMs est q'un nombre restreint d'échantillon suffit à la
détermination des vecteurs de support (SVs) permettant la discrimination
entre les classes contrairement à l'estimation statistique. Les
résultats obtenus sur des images de la base USPS sont satisfaisants et
très encourageants.
Mots dlés : apprentissage,
classification, machines à vecteurs de supports (SVMs), reconnaissance
des chiffres manuscrits.

