IV.3 Développement mathématique
IV.3.2 Hypothèses
générales
Les hypothèses physiques liées au modèle
mathématique utilisé sont les suivantes [3, 7, 23]:

La tension mécanique est constante sur la longueur de la
portée.
On suppose que l'influence de la rigidité flexionnelle
sera faible devant les autres effets mécaniques. C'est pourquoi on n'en
tiendra pas compte dans les équations.
On suppose qu'il n'y a aucun déplacement longitudinal.
L'amortissement interne, qui est principalement produit par la
friction entre brins est uniforme donc pas fonction de l'amplitude des
vibrations.
On suppose que la vitesse du vent est normale à la
portée.
IV.3.2 Développement de l'équation
différentielle de base
Le but est de trouver l'équation différentielle
gouvernante de base qui régit les déplacements verticaux d'un
conducteur tendu soumis à une force externe distribuée.
Le modèle utilisé est celui de la corde vibrante
[23], dans lequel en ajoutant un terme pour
|
les forces d'amortissement "
|
ì ( ) " à cause des frictions internes et
un terme pour les
? ( , )
U x t
x
? t
|
2
forces externes "f(x, t) ", on trouve
l'équation intégrale gouvernante d'un câble suspendu:
? U x t
( , ) ? U x t
( , ) ? ? U x t
( , )
ñ ì á
( ) 2
x + ( )
x - ( ( )
x ) ( , )
= f x t (IV.1)
? t ? t x
? ? x
qui est définie sur le domaine suivant:
0 = x = L t>t 0
et avec les conditions aux frontières suivantes:
) 0
à x t t U x t
0 0 0
( ) ( ,
>
) 0
à x t t U x t
L L
( ) ( ,
> 0
et les conditions initiales suivantes:
à t x = x = x L U x t
= U x
0 0 0 0
( , ) ( )
( 0 =
? U x t
? t
( , ) ) t 0
? 2 ( , )
U x t? ( , )
Le terme 2
ñ ( )
x
? t
représente
représente les forces d'inertie, et le terme )
? á U x t
( ( ) x
x
? x ?
la force de tension mécanique.
ñ : densité du conducteur [kg/m].
á : tension mécanique dans le conducteur
[N/m2].
ì : coefficient d'amortissement.
U(x,t) : positon verticale du
conducteur en fonction de la coordonnée x et du temps t[m].
U0(x) : position initiale du conducteur en fonction de la
coordonnée x [m].
? ( , ) : vitesse du conducteur. [m/s].
U x t
? t
2 ( , )
U x t
? t 2
? : accélération du conducteur.
[m/s2].
f(x,t) : forces externes par
unité de longueur. [N/m]. (Voir ANNEXE I).
L'équation (IV.1), peut être
résolue par la méthode des éléments finis. Cette
méthode discrétise une formulation intégrale pour conduire
à un système d'équations algébriques fournissant
une solution approchée du problème. Avec la technique des
éléments finis, le domaine est discrétisé en
plusieurs petits éléments de forme et de longueur variables.
Pour obtenir la forme discrétisée de
l'équation (IV.1), nous utilisons la technique des
résidus pondérés de GALERKIN qui permet de diminuer
l'ordre d'intégration tout en faisant apparaître un terme
supplémentaire en utilisant l'intégrale par partie [31, 34].
L'équation de résidus pondérés sur un
élément typique s'écrit :
e 2 U x t
e e e
? ( , ) ? U x t
( , ) ? ? U x t
( , )
ñ ì á
( ) 2 + - - f x t x dx
Ö =
e
( )
x x ( ( ) ) ( , ) ( ) 0
x i (IV.2)
? t ? t x
? ? x
où les Öi (x) sont les
fonctions d'interpolation nodales (indépendants du temps). Nous
effectuons une intégration par parties pour l'équation
(IV.2), nous aurons:
e e
~ e ~
e e
U x t
( , ) ( )
d x
Ö ?
? U x t
( , )
i
dx + á ( )
xdx
? d ?
x
f x t x dx x
( , ) ( ) ( ( )
e á
= Ö - -
i
x )
x 1
t
xn
x
(IV.3)
e ~
? 2 U x t
e ( , )dx
? t
e
2
U x t
e
? ( , ) ) (
Ö e
i
?
x
Ö e
i
( ) ( )
x x
ñ
|
~
La fonction U e
|
est une solution approchée du problème sur un
élément et dont la forme est:
|
n
~
U e x t a a t x
(IV.4)
( , ; ) ( ) ( )
= Ö e
j j
j 1
|
où les aj (t)
représentent les valeurs de la fonction U
|
aux noeuds, et n est le nombre de degrés de
|
libertés (degré d'interpolation).
Substituons la forme générale de la solution
approchée élémentaire (IV.4) et ses
dérivées :
j
j
n
) =
a t j ( )
~
? U e
e ( ,
( , x t x t
? x
~
e
? U x t
( , ) =
? t
1
n da t
j (
1 dt
d x
Ö j ( )
dx
)
Ö ( )
j
x
(IV.5)
? ( , ) (
n d a t
2
U x t j
=
? t 2 j = 1 dt 2
)
Ö ( )
x
2 ~ e
j
dans l'équation (IV.3), nous retrouvons
l'équation élémentaire d'un élément typique
qui est de la forme:
[ ] e [ ] e [ ] e
e
d a t
2 ( ) ( )
da t
M + + =
C K a t F t
( ) ( ) (IV.6)
dt 2 dt
où les matrices élémentaires: masse,
amortissement et rigidité sont liées aux fonctions
d'interpolation Öi (x) de la manière
suivante :
e
e
Ö i
e
Ö j
M x x x dx
=
e ( ) ( ) ( )
ñ
ij
e
e
j
C x x x dx
e = Ö Ö
e ( ) ( ) ( )
ì
ij i
=
Ke
ij
)
dx
e Ö Ö
e d x
e
d x
( ) (
i j
á ( )
x
dx dx
|
F t
e ( )
i
|
e
|
f x t x
( , ) ( )
e
Ö i
|
dx x t x
e
- Ö
[ ô ( , ) ( )
e
i
|
n
1
|

~
e ( , )
x t
? x
ô á
( , ) ( )
t x
= -
e
x
? U
Développons maintenant une expression spécifique
pour Öi (x) correspondant à un
élément linéaire (Figure IV.1) :
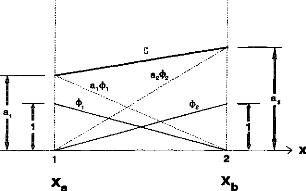
Figure IV.1 Fonctions d'interpolation pour un
élément linéaire. [7, 34]
Ö
Ö
e ( )
1
x
x x
-
2
e ( )
2
x
x x
- 1
x x
-
2 1
d x
Ö e ( ) 1
1 = x x
-
(IV.7)
2 1
d x
Ö e ( ) 1
1 =
x x
- dx
2 1
x x
-
2 1
dx
Substituons la fonction dans l'équation
élémentaire (IV.6) qui devient :

3 6
+
ññe e L L
áe
á â
e e L
+
L
L 3
e
-
( )
t
âeL
áe
+
L
3
a 1
f L
e
+ ô
2
e
( x ,
t )
ñ ñ
e e
L L
3 6
ñ ñ
e e
L L
6 3
d a t
2 1 ( )
dt2
d a t
2 2 ( )
dt2
ñ ñ
e e
L L
6 3
d a t
2 1 ( )
dt2
d a t
2 2 ( )
dt2
á
L
+
-
a 2
( )
t
f L
e
-
2
ô e
( ,
x
t)
(IV.8)
Après avoir effectué l'assemblage de tous les
éléments, on obtient un système d'équations
différentielles discrétisées où les
ai (t) représentent les déplacements
de chaque noeud.
(IV.9)
·
·
·
[ M ] a [ C ] a [ K
] a { F }
+ + =
L'équation (IV.8) est l'équation
différentielle de base qui régit les déplacements
verticaux d'un conducteur tendu soumis à une force externe
distribuée.
II s'agit maintenant d'intégrer l'équation
(IV.9) par rapport au temps afin d'isoler l'amplitude des
vibrations. Pour résoudre cette équation, on peut utiliser soit
une méthode d'intégration directe, soit la méthode de
superposition modale.
IV.3.3 Méthode de superposition modale
Pour présenter un modèle raisonnable de
vibration, les cinq premiers harmoniques du mouvement sont important
d'être considérés. Ce peu de modes de vibration est capable
de décrire le comportement du système. Par ce que le nombre de
modes de vibration est peut (5 modes) et le système d'équation
(IV.8) est linéaire, la superposition modale devrait
être un bon choix et il n'y aura aucun besoin d'utiliser une
intégration directe. [7, 8, 32, 33]
Le but de la méthode de superposition modale est de
découpler le système d'équations en "n" équations
indépendantes, représentant chacune un mode de vibration. Par
conséquent, un système d'équations différentielles
découplées et réduit est beaucoup plus court à
intégrer qu'un système couplé. L'économie de temps
permet d'utiliser un pas de temps plus petit et donc d'augmenter la
précision des résultats. [7]
Dans un premier temps, il s'agit de calculer les valeurs et les
vecteurs propres du système [30].
Soit le système sans amortissement et sans sollicitation
externe suivant :
|
·
·
[ ] [ ]
M a K a 0
+ =
Les solutions de l'équation (IV.10) sont
de la forme:
|
(IV.10)
|
|
a v e
=
|
i t
ù
|
(IV.11)
|
En remplaçant l'équation (IV.11)
dans l'équation (IV10) on obtient:
[ ] [ ]
K a ë M a 0
- =
(IV.1 2)
II existe "n" solutions à l'équation
(IV.12); chaque solution consiste en une valeur propre
ë , et un vecteur propre v correspondant; satisfaisant
l'équation suivante:
|
[ ] [ ]
K v M v
= ë i
i i
|
(IV.13)
|
On définit la matrice des vecteurs propres [V] et
la matrice des valeurs propres [~2] telles que:
[ ]
V = v 1 , v 2 ,
, vn (IV.14)
0 0 . . . 0
ù 2
2
0 0 ù 2 3 . . . 0
où ù i = ë i
2 (IV.15)
[ ]
Ù =
2
Les vecteurs propres d'un système correspondant
à des valeurs propres distinctes sont linéairement
indépendants [7, 8, 32], Par conséquent, la matrice [V]
est orthogonale avec [M] et [K], et orthonormale avec
[M] c'est-à-dire :
|
T
v K v i i
[ ] = ù 2 pour
i j
|
=
|
j
|
(IV.1 6)
|
|
=
|
0 pour
|
i
|
?
|
j
|
T
[ M
v
v i j
= =
1 pour
(IV.17)
La solution de l'équation (IV.9) peut
être écrite sous forme de superposition linéaire des "n"
modes, chacun multiplié par une amplitude générale variant
en fonction du temps; donc:
|
n
a t A j t v
( ) ( ) ou bien [ ]
= a ( t ) V A ( t )
=
j=1
|
(IV.18)
|
En substituant l'équation (IV.18) dans
l'équation (IV.9) et en multipliant par
[V]T (la matrice transparente) , et en utilisant les
relations d'orthogonalité développées
précédemment, on obtient un système d'équations
transformées où les termes masse et rigidité sont
découplés:
|
·
·
·
A t V C V A t 2 A t V F
( ) [ ] [ ][ ] ( ) [ ] ( ) [ ] { }
T T
+ + Ù =
|
(IV.1 9)
|
On peut découpler entièrement l'équation
(IV.19), en regroupant les facteurs d'amortissement sur la
diagonale de la façon suivante:
|
2 0
ù î
2
1 1
|
0 .
|
. .
|
0
|
|
0 2ù
|
2
2
|
î 2
|
0 .
|
. .
|
0
|
|
[ ] [ ] [ ]
V T C V=
|
0 0
|
2 .
ù î
2
3 3
|
. .
|
0
|
(IV.20)
|
|
~
|
~
|
~
|
~
|
|
0 0
|
0 .
|
. . 2ù
|
2
n n
î
|
Où îi représente le pourcentage
d'amortissement relié au ième mode de
vibration.
En substituant l'équation (IV.20) dans
l'équation (IV.19), on obtient un système
d'équations séparées où chaque équation
représente un mode de vibration.
·
·
·
A t A t A t f t i ,. .
( ) 2 2 ( ) 2 ( ) ( )
+ + = =
ù î ù 1 2
, m
i i i i (IV.21)
Où m est le nombre de mode nécessaire pour bien
représenter le système et :
|
T
f ( t ) v { F ( t
)}
=
i
i
|
(IV.22)
|
Les conditions initiales a t et
( )
0
multiplication par [V]T
[M], donc:
·
a sont transférés aux A
(t)et
·
A(t) par la
|
A t V T M a t
( ) (
= [ ] [ ]
0
|
)
0
|
(IV.23)
|
|
·
·
A t V T M a t
( ) ( )
= [ ] [ ]
|
(IV.24)
|
00
Le système d'équations (IV.21)
peut être résolu en utilisant une des méthodes
d'intégration directe, ensuite on fait la sommation des A
(t) en accord avec (IV.18) pour obtenir les
déplacements réels a(t).
IV.3.4 Discrétisation du temps
Les méthodes d'intégration directe
discrétisent le temps en plusieurs petits intervalles variables
où l'on évalue l'équation différentielle à
chaque pas de temps. Ces méthodes utilisent des relations de
récurrence qui relie les valeurs inconnues au temps tn avec
les valeurs connues à un temps plus antérieur comme
tn-1 et tn-2. Quatre parmi ces relations de
récurrences sont les plus utilisées actuellement dans les
programmes commerciaux [7, 8, 32, 33]:
· Méthode des différences centrales.
· Méthode de Houbolt
· Méthode de Wilson
· Méthode de Newmark
La méthode des différences centrales est une
méthode d'intégration explicite [ 7, 33], donc très
rapide. Pour cette raison cette méthode est utilisée pour
résoudre le système d'équations découplées
(IV.21). Cette méthode requiert trois temps soit :
tn-1, tn et tn-2, le système d'équations
est évalué au temps central.
·
·
·
A t C A t A t f
( ) ( ) ( )
[ ] [ ] 1 { } 1
2 (IV.25)
n D n n n
- -
1 1
+ + Ù =
- -
Les deux dérivées ont été
approximées par différences centrales :
{ } { }
A A
-
n
·
A
n - 2

n - 1
·
·
A =
n - 1
2
Ät
2
Ät
(IV.26)
- 2
{ } { } { }
A A A
n n n
- +
2 - 1
En remplaçant les deux dérivées dans
l'équation (IV.25), et en isolant pour {
A}n :
2
{ } { } { } { } 1
2 ? Ä
w t
2 2 w t 1 Ä t
i i i Ä -
î
A = A - - -
1 2
+ A + f
n n n (IV.27)
1 + Ä
w t 1 1
n
î + Ä
w t + Ä
w t
i i i î i i î i
Où i=1, m m étant le nombre de
mode utilisés.
Il s'agit maintenant de résoudre le système
d'équations (IV.27) pour trouver les
déplacements
modaux A j (t) en utilisant
les conditions initiales, et calculer ensuite les déplacements
réels a(t) à
l'aide de l'équation (IV.18).
| 

