|

Introduction 1
Présentation de l'ASECNA 2
1-Historique 2
2- les missions 2
3- Implantations 3
4-Infrastructures et moyens techniques 3
5.1 Organigramme 4
5-Organisation 4
5.2.1 Le Comité des Ministres de tutelle .4
5.2 Les Structures Statutaires 4
5.2.2 Le Conseil d'Administration 4
5.2.3 Le Directeur Général 5
5.2.4 L'Agent Comptable, 5
5.2.5 Le Contrôleur Financier 5
5.2.6 La Commission de Vérification des Comptes 5
Chapitre 1: le DME (Distance Measuring Equipment) 6
1.1 Introduction 6
1.2 Principe du système DME .7
1.3 Présentation fonctionnelle .8
1.4 Description et composition 9
1.5 La fonction de maintenance : 10
1.6 La fonction alimentation 10
Chapitre 2 : les VOR (VHF Omnidirectionnal Range) 12
2.1 Généralité . ....12
2.2 Principe ..13
2.2.1 Les signaux modulation .....13
a. Signal à phase fixe : 30 Hz reference 13
b. Signal à phase variable : 30 Hz variable 13
c. Signaux : Phonie et identification .13
2.3 Présentation fonctionnelle .13
2.3.1 Utilisation d'une amplification linéaire ..13
2.3.2 Utilisation de boucle d'avertissement .14
2.3.3 Utilisation d'amplificateur accordable dans la bande .14
2.3.4 Émission .15
2.3. 5 contrôles de l'émission 16
2.3.6 Commande ..17
2.3.7 Commutation ..17
Chapitre 3 : IL (L'Instrument Landing System) ..18
3.1 Généralité ..18
3.1.1 Modularité ..18
3.1.2 Contrôle de fonctionnement 18
3.1.4 Accessibilité 18
3.1.3 Technologie « état solide » .19
3.1.5 Aide à la maintenance .19
3.1.6 Association de la baie aux aériens ..19
3.2 Principe .20
3.2.1Avantages de l'ILS : 21
3.2.2Inconvénients de l'ILS : 21
3.2.3 Localizer 21
3.2.4 Glide Path 22
Chapitre 4 : présentation du système CIBUS ..23
4.1généralité ..23
4.2 Architecture .23
4.2.1 Branche longue distance ..23
4.2.2 Branche courte distance 23
4.2.3 Principe de fonctionnement .24
4.3 MESSIR SADIS ..24
4.3.1 Principe de fonctionnement .24
4.3.2 Configuration matérielle 25
Conclusion ..28
Annexe

Étymologiquement le mot aéronautique provient du
Latin aer, aeris qui signifie « air » et nauta, nautae signifiant
« mariner, batelier, nautonier ».
L'aéronautique est définie comme l'ensemble des
sciences et des techniques ayant trait à la navigation aérienne
et la construction des aéronefs. Il concerne au déplacement et
à la navigation hors de l'atmosphère terrestre.
Il permet le déplacement aérien et
transfrontière des biens et personnes à très vite
générer des entités chargées d'organiser cette
activité au plan international afin de promouvoir des standards et des
normes aussi bien au niveau des appareils qu'au niveau des équipages.
L'activité aéronautique est aussi une composante
de l'économie d'un pays, et des nombreuses écoles qui ont pour
but de former les cadres des usines, des constructeurs aéronautique de
l'industrie du transport aérien ou du contrôle de la
navigation.
Partant de ces idées, l'ASECNA que nous allons
présenter, dispose des équipements et des moyens techniques
permettant de bien maitriser la navigation aérienne. Elle dispose d'une
antenne de station terrienne de 1 1metres de diamètre située
à Dakar qui assure l'interconnexion des ses sites, du réseau de
télécommunication aéronautique par satellite et d'autre
applications au sein de l'entreprise. Cependant l'ASECNA a mis en place des
équipements de haute technologie qui permettent de faire l'aider
à la navigation. D'où leur nom les NAVAIDS dont la
présentation de ces derniers fait l'objet de ce rapport. C'est dans
cette optique que nous allons rédiger notre rapport de stage
effectué à l'ASECNA à la direction des moyens techniques
et informatiques dans le département de maintenance aux services
d'équipement dans une durée d'un mois.
Présentation de l'ASECNA
1-Historique
Le 12 décembre 1959 à Saint-Louis du
Sénégal, les Chefs d'Etat et de Gouvernement des Etats autonomes
issus des ex-Fédérations de l'AEF, de l'AOF et de Madagascar
signent la Convention qui va donner naissance à l'ASECNA, laquelle
comprend aujourd'hui 17 Etats membres africains et la France et ayant son
siège à Dakar.
Le motif de cette création : éviter de morceler
l'espace aérien à l'heure où les avions
commençaient à aller de plus en plus vite, de plus en plus haut
et de plus en plus loin. Dans le cadre d'une activité coûteuse,
celle qui consiste à assurer la sécurité de la navigation
aérienne, il s'agit également d'unir les moyens financiers, les
capacités matérielles et humaines afin de parvenir au meilleur
coût ; enfin, pour les jeunes Etats, de réaliser ensemble quelque
chose de grand, d'oeuvrer en commun au même but.
Parlant de son efficacité, au fil d'une africanisation
nécessaire et souhaitable du personnel, et avec la signature d'une
nouvelle convention à Dakar redéfinissant la vocation de
l'Agence, ses statuts et son organisation (1974), l'ASECNA s'est
transformée pour s'adapter au nouveau contexte politique et
économique, devenant ainsi un modèle en matière de
coopération Inter-Etats africains et l'un des leaders du
développement en Afrique des technologies de navigation par satellites
et de gestion du trafic - CNS/ATM. Aujourd'hui, à l'heure de la
formation des agents aux technologies innovantes, l'esprit qui a
présidé à la création de l'ASECNA en 1959 reste le
même : placé sous le signe de l'efficacité, de la
solidarité africaine et de la coopération, il ne vise qu'à
l'entente cordiale avec les usagers et leurs sécurité
optimale.
Forte d'une expérience profondément
enracinée dans l'histoire, l'ASECNA a donc tous les atouts en main pour
aborder dans les meilleures conditions l'aviation civile du XXIème
siècle avec toujours une exigence constante de qualité au service
de la sécurité aérie
2- les missions
Régie par la Convention de Dakar du 25 octobre 1974,
l'ASECNA exerce à titre principal les activités communautaires
prévues en son Article 2 et, à titre subsidiaire, gère les
activités nationales au bénéfice des Etats membres pris
individuellement (Articles 10 et 12) ainsi que des Etats et organismes tiers
(Articles 11 et 12).
Les équipements d'aide à la navigation
et de l'atterrissage 6
Conformément à l'article 2 de la Convention de
Dakar, l'Agence est chargée de la conception, de la réalisation
et de la gestion des installations et services ayant pour objet la transmission
des messages techniques et de trafic, le guidage des aéronefs, le
contrôle de la circulation aérienne, l'information en vol, la
prévision et la transmission des informations dans le domaine
météorologique, aussi bien pour la circulation en route que pour
l'approche et l'atterrissage sur les aérodromes communautaires.
3- Implantations
L'ASECNA a en charge un espace aérien d'une superficie
de 16 100 000 km2 (1,5 fois l'Europe) couverte par 6 régions
d'information en vol (F.I.R) définies par l'Organisation de l'Aviation
Civile Internationale (OACI).
Elle supervise à ce titre :
10 centres de contrôle régionaux
57 tours de contrôle
25 aéroports internationaux
76 aéroports nationaux et régionaux
4-Infrastructures et moyens techniques
En vue de remplir correctement ses missions, L'ASECNA dispose de
moyens et infrastructures à la dimension des objectifs visés.
Pour atteindre ses objectifs, l'ASECNA a fait des importants
investissements qui peuvent être apprécié à travers
le PSE-plan de services équipements-2000/2006 d'un montant de 173
milliards FCFA, et qui est arrivé à échéance en
décembre 2006. Ainsi le comité des ministres de tutelle a
décidé de la mise en place d'un plan
intérimaire-PSEIcouvrant la période 2007/2008. Approuvé
par le conseil d'Administration pour un montant de 80 milliards de FCFA, il
reprend les projets non finalisés du PSE 2000-2006, ainsi que quelques
projets nouveaux revêtant un caractère d'urgence. Objectif, la
consolidation des services existants et la mise en oeuvre des nouveaux concepts
et outils technologiques CNT/ATM.
Ambitieux par son montant, ce plan doit permettre une
modernisation des équipements
et installation dont l'outil de
formation ainsi que les premières applications
opérationnelles des nouvelles technologiques de
navigation et de gestion de trafic
CNT/ATM.
5-Organisation
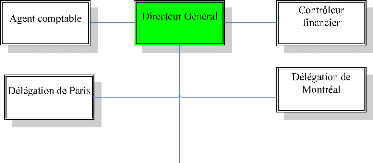
5.1 Organigramme

5.2 Les Structures Statutaires 5.2.1 Le Comité des
Ministres de tutelle
Définit la politique générale de
l'Agence.
Se réunit au moins une fois l'an en session
ordinaire; la présidence est tournante, à un rythme annuel. Elle
est assurée depuis juillet 2007, par le GABON en la personne de M.
Dieudonné Mouiri Boussougou, Ministre des Transports, succédant
au Mali.
5.2.2 Le Conseil d'Administration
Prend les mesures nécessaires au fonctionnement de
l'ASECNA, au moyen de délibérations relatives notamment aux
budgets annuels de fonctionnement et d'équipement.
Se réunit au moins deux fois l'an.
Les équipements d'aide à la navigation
et de l'atterrissage 8
· La présidence est assurée depuis janvier
2005 pour deux ans par M. Jacques Courbin, de nationalité
française.
5.2.3 Le Directeur Général Assisté de
six Directeurs,
· Assure la gestion de l'Agence en exécution des
décisions prises par les deux instances statutaires
précitées.
· Recrute tout le personnel de l'Agence à
l'exception de l'Agent Comptable et du Contrôleur Financier
· Est responsable de la gestion administrative de
l'Agence.
· Nomme dans chaque Etat membre un "Représentant",
responsable des activités de l'Agence dans son Etat d'affectation.
5.2.4 L'Agent Comptable,
Nommé par le Conseil d'administration après
agrément du Comité des Ministres.
· Tient la comptabilité générale et la
comptabilité analytique d'exploitation.
· Prépare le compte financier,
présenté au Conseil d'administration après avoir
été soumis au contrôle de la Commission de
Vérification des Comptes.
5.2.5 Le Contrôleur Financier
Nommé par le Conseil d'administration après
agrément du Comité des Ministres. A une mission
générale :
· de contrôle de la gestion de
l'établissement
· de surveillance de toutes les opérations
susceptibles d'avoir directement ou indirectement une répercussion
économique et financière.
5.2.6 La Commission de Vérification des Comptes
Composée de trois membres désignés par le
Conseil d'administration.
· Etablit, pour le Conseil d'Administration et pour chaque
Ministre de tutelle, un rapport sur la régularité de la gestion
comptable de l'Agence
Formule des propositions motivées sur le quitus
à donner à l'Agent Comptable.
Chapitre 1: le DME (Distance Measuring Equip ment)
1.1 Introduction

1 :principe DME
Le DME (: Equipement de mesure de la distance) a
été défini dans le document ICAO (OACI Organisation de
l'Aviation Civile International) annexe 10, comme un système radio civil
d'aide à la navigation aérienne avec couverture
omnidirectionnelle à cour et moyen rayon, en action dans la bande de
fréquence autour des 1000Mhz.
Un tel système est un type de radar secondaire (avec
méthode à transpondeur) qui
permet de mesurer, jusqu'à
200 aéroplanes de manière contemporaine, leur distance par
Les équipements d'aide à la navigation
et de l'atterrissage 11
rapport à un point de référence à
terre (radiobalise sol DME).La distance est déterminée en
mesurant le retard de propagation d'une impulsion RF émise par le
transmetteur (Interrogation) de l'aéroplane et reçue sur une
fréquence inadaptée, comme réponse de la station de
terre.
L'intervalle de temps qui s'écoule entre l'envoi de
l'interrogation et la réception de la réponse fournit à
l'aéroplane de l'information de distance réelle de la station de
terre ; une telle information peut être lue directement sur l'indicateur
de bord, du pilote ou du navigateur.
Le DME, associé au VOR (voir chapitre),
installé dans le même site, permet de déterminer la
direction et la distance (méthode rho-thêta) ; et est
défini comme système VOR/DME.
Le DME opère dans la même gamme de
fréquence (de 960 à 1215 Mhz) du TACAN (système tactique
d'aide navigation) dont le DME est la section qui mesure la distance. Voila
pourquoi, dans de nombreux pays sont installé des systèmes
combinés VOR/TACAN, ou encore les systèmes VOR/DME, pour
réunir dans une unique radiobalise un système qui produit des
signaux pour l'indication de la direction et de la distance.
1.2 Principe du système DME
Les avions équipés avec le DME de bord,
transmettent des paires d'impulsion RF codées d'interrogation sur le
canal récepteur de la radiobalise sol. La radiobalise, à son
tour, émet des paires d'impulsion de réponse codées sur le
canal récepteur de l'appareil de bord déplacées de 63 Mhz
par rapport à la fréquence interrogatrice.
La radiobalise sol (composée de : transpondeur,
récepteur et transmetteur, et antenne) est en grade de répondre
jusqu'à environ 200 interrogations contemporaines (c'est-à-dire
des réponses jusqu'à 4800 paires d'impulsions par seconde).
Le DME produit la génération des paires
d'impulsions casuelles (`squitter') pour maintenir 800 ou 2700 (programmables)
couples d'impulsions par seconde irradiées quand, le nombre des
interrogations décodées est inferieur à celui
programmé (800 ou bien 2700 paires d'impulsions par seconde). Les
squitter casuels programmés sont substitués par les
réponses pendant les interrogations et plus ces derniers augmentent,
Les équipements d'aide à la navigation
et de l'atterrissage 12
plus le nombre de réponse peut atteindre la valeur dite
de 4800 paires d'impulsions par seconde.
Les signaux de réponse parviennent au récepteur
de bord, où des circuits spéciaux temporisateurs mesurent
automatiquement le temps entre les impulsions d'interrogation et les impulsions
de réponse correspondantes en convertissant cette mesure en opportuns
signaux électriques qui pilotent l'indicateur de distance qui en indique
la valeur en MN (nautical miles) ou en km.
La radiobalise sol introduit un retard fixe, appelé
retard systématique de réponse, déterminé entre la
réception de chaque paire d'impulsion codifiées d'interrogation
et la transmission de la réponse correspondante.
1.3 Présentation fonctionnelle
La balise au sol comprend une antenne et une baie DME 721.
L'antenne est omnidirectionnelle pour une installation DME en
route, utilisée pour la navigation, elle est directionnelle pour une
installation DME atterrissage, utilisé conjointement avec un
ILS en approche à l'atterrissage.
La baie DME 721 est un équipement doublé,
contrôlé en permanence par un système à deux
moniteurs fonctionnant en parallèle (dans le mode de fonction
automatisée).
La baie contient deux transpondeurs : l'un est en service
(connecté sur antenne), l'autre est en secours (connecté sur
charge).
Chaque transpondeur doit pouvoir :
~ Recevoir les interrogations en provenance des avions,
~ Décoder les signaux reçus afin de
vérifier qu'il s'agit bien d'interrogation en tenant compte du retard
systématique puis coder la réponse,
~ Fournir les signaux de squiter (remplissage) et les signaux
d'identification, ~ Fournir les signaux d'émission qui seront
appliqués sur l'antenne.
C'est la fonction Emission Réception.
Pour réaliser cette fonction, le transpondeur comprend
:
Voie Réception
|
Voie émission
|
·
|
Un duplexeur chargé de séparer les signaux
Emission Réception
|
·
|
Un pilote fournit la fréquence
UHF d'émission et l'oscillateur
|
· Un mélangeur
préamplificateur
délivrant un signal à
fréquence
|
|
local pour le premier changement de fréquence en
réception
|
|
|
intermédiaire à 63 Mhz
|
·
|
Un modulateur
|
|
·
|
Un récepteur
|
·
|
Un amplificateur 130 W
|
|
·
|
Un décodeur : extraction des
signaux dont le codage est correct, génération
du retard systématique, codage de réponse, création des
signaux de squitter et d'identification.
|
·
|
Un amplificateur 1 KW (version 1 KW
|
1.4 Description et composition
Le transpondeur au sol au sol a pour rôle de recevoir
les interrogations qui lui sont destinés sans avoir à
connaître leur origine géographique, et les renvoyer avec un
retard constant par rapport à l'instant d'arrivé. Les signaux
d'interrogation et de réponse sont constitués par des paires
d'impulsions de 3,5ìs à mi hauteur dans la bande de 962-1213
Mhz.
L'OACI définit 126 canaux en mode X et 126 canaux en mode
Y, espacés de 1 Mhz.
Chaque canal comprend une fréquence d'interrogation et une
fréquence de réponse espacée de 63 Mhz.
Codage en interrogation (espacement entre deux impulsions) : 12
ìs mode X
36 ìs mode Y
Code réponse (espacement entre deux impulsions) :
12 ìs mode X
36 ìs mode Y
La cadence d'interrogation est de 150 Hz (recherche)
jusqu'à ce qu'une information de distance soit obtenue (temps
d'acquisition), puis tombe à moins de 30 Hz (poursuite).
La cadence maximale de réponse de balise (2700 pps :
paires d'impulsion par seconde) permet de desservir simultanément une
centaine d'avion en l'absence d'interrogation, le transpondeur émet des
paires codées avec une récurrence aléatoire «
squitter » de valeur moyenne à 700pps. Pour permettre
l'identification de la balise au sol, les signaux réponses ou «
squitter » sont remplacés périodiquement (toutes les 30 s)
par un signal à 1350 manipulé en code morse par l'indicatif d la
station (3 lettres).
1.5 La fonction de maintenance :
Cette fonction assure le contrôle du transpondeur sur
charge à l'aide du générateur de maintenance dont les
principales caractéristiques sont réglables.
En mode de fonctionnement « maintenance », le
fonctionnement du transpondeur sur antenne est effectué en monitoring
simple (un moniteur associé au générateur de test), les
opérations de maintenance sont possibles sur la voie en attente sans
perturber l'exploitation.
Le générateur de maintenance est associé au
second moniteur.
Un ensemble de mesure intégré à la baie
assure le contrôle des paramètres des deux transpondeurs
(micro-ampèremètre sur panneau de commande).
1.6 La fonction alimentation
Deux blocs d'alimentation basses tensions fournissent aux deux
transpondeurs, aux différentes cartes et modules, les basses tensions
nécessaires à leur fonctionnement. Les tensions de sorties sont
mises en parallèle, seules les tensions de 60V ont
particulièrement à l'un et à l'autre transpondeur.
Deux versions d DME sont disponibles. L'une dite « DME en
route » possédant une puissance d'émission de 1 KW. L'autre
version « DME atterrissage » possédant une puissance de 100W
obtenus par la suppression de l'amplificateur 1 KW et de son modulateur.
Le DME en route est généralement associé
à un système VOR. Le séquence des manipulations ( 3 VOR -
1 DME) est alors assuré par les manipulateurs du VOR, si le VOR ne
comporte pas des sorites manipulation DME, le DME peut être
utilisé avec ses deux manipulateurs internes pour fournir la
manipulation du VOR.
Le DME d'atterrissage est associé à un
système ILS, en général, il est Co-implanté avec le
GLIDE Path.
L'équipement reçoit la manipulation issue de
l'équipement ILS localizer et synchronise la manipulation du DME sur
celle de l'ILS suivant le cadencement 3 manipulation ILS - 1 manipulation DME,
la transmission s'effectuant par l'intermédiaire soit d'un
récepteur d'identification, soit de la télécommande
localizer, Glide (modem).
En option, on peut trouver :
Un récepteur d'identification : synchronisation des
manipulateurs internes du DME sur l'équipement ILS associé,
Un oscilloscope pour la maintenance,
Un compteur de maintenance (mesure des récurrences, du
pourcentage des réponses, des périodes de manipulation),
Un système de commande et de contrôle à
distance ;
Les équipements d'aide à la navigation
et de l'atterrissage 16
Les différents sous-ensembles intégrés
dans la baie doivent être alimentés par diverses tensions obtenues
à partir d'une tension continue V : c'st la fonction alimentation.
Cette tension V est elle-même obtenue par une baie
énergie à l'alimentation doublée qui assure la charge
d'une batterie de secoure avec les particularités suivantes :
· Passage sans interruption sur batterie en cas de coupure
secteur
· Prealarme « autonomie batterie » à seuil
réglable
Chapitre 2 : les VOR (VHF Omnidirectionnal Range)
2.1 Généralité
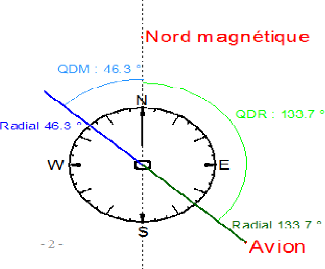
Figure 2 Schéma représentant les
informations données
Le VOR est un système de radionavigation permettant
à un aéronef de déterminer son relèvement
magnétique par rapport à une balise VOR c'est-à-dire, son
azimut è par rapport au nord magnétique.
Il se compose :
Au sol d'un radiophare omnidirectionnel, c est la balise
VOR.
A bord d'un récepteur VHF, muni d'un décodeur VOR
qui donne au radiocompas l'information gisement.
En fréquence porteuse VHF située dans la bande
108 - 118 Mhz générée par l'émetteur VOR rayonne
deux signaux à 30 Hz dont la différence de phase fournit,
à tout instant, l'angle è.
L'information angulaire est complétée par deux
paramètres qui sont : l'identification de la balise par code morse, et
la possibilité (très peu utilisée) de transmettre des
informations phonies (météo)
2.2 Principe
Le VOR est basé sur la comparaison des phases de deux
tensions sinusoïdales de même fréquence 30 Hz. La phase de
l'une de ces tensions est indépendante de l'azimut. Dans la direction du
nord magnétique, ces deux signaux sont en phase, et dans un azimut
è leur différence de phase est exactement è.
2.2.1 Les signaux modulation
d. Signal à phase fixe : 30 Hz
reference
Afin de distinguer à la réception de 30 Hz
à phase variable du 30 Hz à phase fixe, ce dernier sera transmis
par l'intermédiaire d'une sous porteuse (fréquence 9960 Hz)
modulée en fréquence (indice 16) par le 30 Hz.
Cette sous-porteuse module en amplitude une porteuse VHF
rayonnée par un aérien dont le diagramme, dans un plan
horizontal, est circulaire.
e. Signal à phase variable : 30 Hz
variable
Le signal à phase variable est obtenu en faisant
tourner à la vitesse de 30 tours par seconde le diagramme en huit d'un
système d'aérien présentant deux lobes circulaires en
opposition de phase.
La combinaison des rayonnements des signaux
références et variables donne à la réception une
porteuse modulée en amplitude dont l'enveloppe BF, de fréquence
30 Hz, présente une phase variant linéairement avec l'azimut du
point de réception.
f. Signaux : Phonie et identification
Les voies phonie (bande 300-3000 Hz) et identification (1020 Hz),
sont transmises par modulation d'amplitude.
2.3 Présentation fonctionnelle
Le VOR étant une radiobalise, il faut créer les
différents signaux qui seront appliquées aux aériens, c
est la fonction émission :
Au niveau de cette fonction, on trouve les principes suivants
:
2.3.1 Utilisation d'une amplification linéaire Les
avantages résultant de cette utilisation sont
· Suppression des amplificateurs BF de puissance
· Simplification des réglages
· Très bonne qualité de modulation
2.3.2 Utilisation de boucle d'avertissement
La mise en service des avertissements permet de maintenir les
paramètres d'émission (amplitude, phase et qualité de
modulation) dans des limites de variations beaucoup plus sévères
que les valeurs couramment recommandées.
2.3.3 Utilisation d'amplificateur accordable dans la
bande
Ces amplificateurs se règlent avec facilité :
Le nombre et la fréquence des opérations à
effectuer en maintenance sont par suite réduits.
· Les signaux produits par les émetteurs doivent
être appliqués sur les différentes antennes par
l'intermédiaire d'un ensemble d'aiguillage : c'est la fonction
commutation
Cette fonction est réalisée d'une façon
entièrement électronique, en utilisant des commutateurs statiques
à diodes.
En sortie des émetteurs les signaux des bandes
latérales supérieures et inferieure sont recombinés pour
distribuer aux antennes des signaux dites variables.
· Les signaux rayonnés par les aérien
doivent être contrôlés en permanence de façon
à vérifier qu'ils sont bien dans les tolérances prescrites
: c'est la fonction contrôle de l'émission.
Au niveau de cette fonction, on trouve les principes suivants
:
o La conception des circuits permet l'élimination des
pannes cachées au niveau des moniteurs. Cette élimination est
obtenue par :

Le doublement des chemins critiques (transmission sous deux
formes complémentaires).

A l'entrée des moniteurs, détection qui assure une
bonne tenue des critères suivants : sensibilité,
linéarité et stabilité.

Surveillance permanente de la station par deux moniteurs
fonctionnant en parallèle pour chaque fonction.
Les ordres de fonctionnement des sous-ensembles d'émission
sont élaborés à partir :
~ De la position des boutons poussoirs situées au niveau
de panneau avant (ou au niveau du pupitre de télécommande).
~ Des signaux fournis par l'ensemble de contrôles
C'est la fonction commande.
La logique de commande, ou transfert, utilise les principes
suivants :
Les équipements d'aide à la navigation
et de l'atterrissage 20
1. une logique synchrone qui assure une bonne immunité
aux bruits et une absence de fonctionnement aléatoire.
2. utilisation d'un test actif déclenché
manuellement, qui permet de vérifier l'intégralité des
moniteurs.
3. les possibilités de télécommande et
télésignalisation intègrent dans le système de
télécontrole Navaid.
4. un système d'arrêt sécurité coupe
l'émission si une alarme durant plus de 60 secondes n'a pas
provoqué de basculement ou arrêt.
2.3.4 Émission
L'ensemble d'émission est chargé d'assurer la
génération des signaux qui seront appliqués aux
aériens par l'intermédiaire de l'ensemble du relais coupleur et
de la distribution d'antenne.
1) L'ensemble d'émission peut être simple ou
doublé.
Les fonctions communes sont : Antennes, Distribution d'antenne et
Relais coupleur. Les fonctions doublées sont : Emetteur et Alimentation
émetteur.
L'émetteur fournit les signaux suivants :
A. A la sortir du relais coupleur SDR 18, une porteuse Fo
modulée en amplitude par:
· La phonie
· L'identification (1020 Hz)
· La sous-porteuse 9960 Hz (modulée en FM)
A partir de la distribution d'antenne (SDR 15c) deux signaux VHF
alimente l'antenne référence constituée de deux parties
qui sont :
· Antenne référence supérieure
· Antenne référence inferieure
B. A la sortie du relais coupleur SDR 18, les signaux BLI
et BLS. A partir de SDR 15c, deux signaux alimentent l'antenne variable :
· BL sinus
· BL cosinus
2) Afin de produire les 4 signaux précédant, il est
nécessaire d'avoir :
a) Un ensemble à bas niveau « PILOTE »
assurant
La génération de la porteuse Fo (108 à 118
Mhz) et des 3 signaux de modulation BF. La génération de la bande
latérale supérieure (BLS)
La génération de la bande inferieure (BLI)
BLS : Fo + 30 Hz
BLI : Fo - 30 Hz
b) La voie porteuse se compose d'un préamplificateur et
un amplificateur assurant une puissance nominale de 50 W modulés.
Les voies BL comportent chacune un amplificateur pouvant
délivrer jusqu'à 5 watts non modulés (cw).
c) La voie porteuse et les voies BL de l'émetteur 1,
de même la voie porteuse et les voies BL de l'émetteur 2, sont
groupées sur la carte relais coupleur qui assure l'aiguillage de
l'émetteur 1 ou 2 sur les antennes et fournit les signaux de comparaison
aux boucles d'avertissement.
2.3. 5 contrôles de l'émission

Figure 3: contrôle de
l'émission
Les signaux émis par les aériens sont
contrôlés en permanence par deux moniteurs, reliés chacun
à un capteur de champ.
1. le moniteur de signaux VOR doit veiller à ce que
les principaux paramètres de l'émission VOR restent à
l'intérieur des tolérances préalablement fixées.
Ces paramètres sont les suivants :
~ niveau VHT
~ taux de modulation 30 Hz
~ phase VOR
2. Le moniteur identification contrôle l'identification
de la station. Les informations d'alarmes issues des moniteurs vont servir
à déclencher les circuits de commande.
2.3.6 Commande
La logique de commande et de contrôle est l'organe central
de l'équipement. A partir des données logiques qui sont issues
:
~ Du panneau avant ou de la télécommande.
~ Des moniteurs (alarme)
La logique de commande crée :
> Les signaux de commande des émetteurs
> Les signaux de command des relais coaxiaux (relais
coupleurs)
> Les informations d'état de la station destinée
à être visualisées
En émission doublée, la logique de commande met sur
arrêt l'ensemble secours lorsque l'ensemble opérationnel est
connecté sur l'antenne.
Un test dit actif assure le contrôle de fonctionnement
moniteur + transfert. Ce test provoque le basculement ou l'arrêt de la
station.
En cas de défaillance des circuits de basculement, un
circuit de sécurité arrête automatiquement
l'équipement si la durée de l'alarme dépasse 60
secondes.
2.3.7 Commutation
La platine relais coupleur (ensemble d'émission
doublé) assure :
y' La connexion de l'émetteur en service sur antenne ;
y' La de connexion entre l'émetteur en service et les
aériens en cas d'arrêt de sécurité
y' L'extraction, des informations nécessaires pour les
asservissements de la voie porteuse.
Cette platine reçoit les ordres de la logique de
commande.
Chapitrent 3 : ILS (L'Instrument Landing System)
3.1 Généralité
L'Instrument Landing System (ILS) ou Système
d'atterrissage aux instruments est le moyen de radionavigation le plus
précis utilisé pour l'atterrissage IFR.
Les points caractéristiques essentiels qui ont
été développés dans l'étude de cet
équipement sont les suivants :
3.1.1 Modularité
Pour répondre aux besoins spécifiques des
utilisateurs et prendre en compte les conditions particulières
d'implantation de ce matériel différentes versions ont eté
développées.
Les sous ensembles sont semblables entre les
différentes configurations, seule la composition est différente
d'une version à une autre, c'est l'aspect modulaire de cet
équipement.
Les sous-ensembles obéissent aux critères les
plus sévères correspondant à la version la plus
sophistiquée ; ils possèdent des caractéristiques
situées à l'intérieur des tolérances fixées
par l'OACI.
3.1.2 Contrôle de fonctionnement
Le prélèvement des signaux s'effectue l'aide de
détecteur champ situés au plus près des antennes
d'émission de façon à s'affranchir des
éléments extérieurs situés entre les antennes et
les détecteurs pouvant perturber le contrôle. Apres recombinaison,
un seul signal (axe, faisceau ou clearance) alimente les circuits
contrôlant un même paramètre.
Les circuits de contrôle sont destinés
vérifier que les signaux sont à l'intérieur de certaines
tolérances. Il est essentiel que ces circuits soient parfaitement
fiables d'une part et que, d'autre part, toute anomalie au niveau de leur
fonctionnement se traduise par l'apparition d'une alarme. Ces circuits ont
été étudiés en fonction des deux imperators
précédents, ils sont dotés d'un système de
détection de panne cachée.
Les équipements d'aide à la navigation
et de l'atterrissage 24
La sécurité de fonctionnement du système
de contrôle et du système de commande est augmentée par
l'utilisation d'un test périodique et automatique en catégorie
III (test opérationnel).
Il est à noter que dans cette catégorie,
l'émetteur ensemble de secours en
fonctionnellement sur charge est constamment
contrôlé par un ensemble de contrôle interne.
La logique de commande est conçue pour recevoir aussi
bien les informations d'alarme en provenance de l'émetteur service que
les informations d'alarme en provenance de l'émetteur secours.
3.1.3 Technologie « état solide »
C'est la technologie employée dans cet
«équipement, elle permet une grande intégration et assure
une plus grande fiabilité obtenue par le choix des composants.
3.1.4 Accessibilité
Cet équipement a été conçu de telle
sorte que tous les réglages des différents sous- ensembles soient
facilement accessibles.
L'intervention au niveau d'un composant ne nécessite
qu'un minimum d'opération. Tous les circuits à faible niveau sont
montés sur des cartes enfichables en circuits imprimés.
3.1.5 Aide à la maintenance
La maintenance préventive et corrective de cet
équipement est simplifiée par la présence d'une
chaîne de mesure intégrée à la baie (bandeau de
mesure), cette chaîne de mesure permet de contrôle les principaux
paramètres ILS sur tous les sous-ensembles.
3.1.6 Association de la baie aux aériens
Chaque configuration de baie peut être connectée au
type d'aérien le plus adapté aux particularités du terrain
et répondant aux performances désirées.
3.2 Principe
Le ILS comme Système d'atterrissage aux instruments
comprend deux éléments essentiels :
> un localizer qui fournit l'écart de l'avion par
rapport à l'axe de la piste ;
> un glide path qui fournit l'écart de l'avion par
rapport à la pente nominale d'approche (le plus souvent 3
degrés).
Ces deux informations sont fournies soit sous forme
d'aiguilles sur un indicateur VOR ou mieux sur un plateau de route HSI, soit
sous forme d'index (barres, triangles, ...) sur deux échelles, l'une
horizontale, l'autre verticale, situées de part et d'autre de l'horizon
artificiel (classique ou EFIS).
Les faisceaux localizer et glide path étant très
étroits et sensibles aux perturbations, leur interception doit toujours
être validée à l'aide d'une autre source de navigation.
Pour le localizer cela peut être réalisé à l'aide
d'un VOR, ADF ou de la RNAV. Pour la validation du glide path, on utilisait un
ou deux markers (balise à émission verticale très
ponctuelle), de plus en plus souvent remplacés par un DME (Distance
Measuring Equipment) dont l'avantage est de fournir une information de distance
en continu. Le DME est le plus souvent co-implanté avec le glide path,
donnant ainsi directement la distance au seuil de piste, ce qui est très
pratique ; mais il arrive exceptionnellement qu'il soit implanté avec le
localizer.
Un voyant lumineux et un signal sonore sont activés au
passage de chacun des markers. L'information de distance DME est quant à
elle fournie sur l'afficheur DME.
D'un point de vue pratique, l'utilisateur affiche une seule
fréquence, celle du localizer, comprise dans la gamme VHF 108,0 - 111,95
MHz. Les fréquences glide path et DME lorsqu'il existe sont dans des
gammes de fréquences différentes (UHF) mais appariées
à celle du localizer, ce qui reste transparent pour l'utilisateur.
La portée certifiée est de 15 à 20 NM
pour le localizer (30 à 50 NM en pratique) ; légèrement
moins pour le glide path. Le DME d'un ILS, moins puissant qu'un DME en route
peut néanmoins être reçu jusqu'à 50 voire 100 NM.
3.2.1Avantages de l'ILS :
· très grande précision ;
· sous certaines conditions (dégagement des aires
critiques, séparations accrues entre avions, secours électrique,
balisage spécifique, ...), permet de réaliser des atterrissages
automatiques et donc de se poser avec des visibilités très
faibles.
3.2.2Inconvénients de l'ILS :
· sensible aux perturbations des faisceaux
électriques (par véhicule ou avion au sol ou avion en vol) ;
· existence occasionnelle de faux axes par réflexion
du faisceau sur un relief ;
· faisceaux étroits nécessitant une aide pour
la capture.
3.2.3 Localizer
Le localizer est constitué par un ensemble d'antennes
situées après le bout de la piste qui émettent une
porteuse VHF entre 108 et 112 MHz, première décimale impaire
(111,75 MHz pour la piste 26 à Orly par exemple).
Elle est modulée par 2 basses fréquences l'une
à 90 Hz et l'autre à 150 Hz. À droite de l'axe de la
piste, le taux de modulation du 150 Hz est supérieur à celui du
90 Hz et inversement à gauche de l'axe. La différence de taux
permet d'en déduire un écart qui est affiché sur le
récepteur de bord.
Il s'ajoute une modulation à 1 020 Hz qui transmet le
code Morse d'identification de la station correspondant
généralement à 2 ou 3 lettres de l'alphabet (OLW pour la
piste 26 à Orly par exemple) transmis au moins 6 fois par minute.
Le diagramme de rayonnement est ouvert dans le plan horizontal
d'environ 35° de part et d'autre de l'axe de piste et de 7° dans le
plan vertical. La zone de guidage linéaire ne couvre quant à elle
qu'une ouverture maximum de +/- 107 m par rapport à la position d'axe.
Soit pour une piste de 2000m une ouverture d'environ +/- 3° (Atan
(107/2000)). Ce système est sensible aux multi trajets
(réflexions, diffractions,...). Pour réduire le
phénomène la plupart des ILS sont bi fréquence (deux
fréquences VHF très proches). Une fréquence VHF pour le
guidage dans l'axe de piste (appelé Directif) et une
Les équipements d'aide à la navigation
et de l'atterrissage 27
fréquence pour la couverture dans le plan horizontal
(appelé Clearance). Le récepteur de bord effectue la capture du
signal le plus fort.
3.2.4 Glide Path
Le glide path est constitué par un ensemble d'antennes
situées généralement entre 120 m et 150 m sur le
coté de la piste, près du seuil, qui émettent une porteuse
UHF entre 328,65 et 335,40 MHz appairée à la fréquence du
localizer.
Elle est modulée par 2 basses fréquences l'une
à 90 Hz et l'autre à 150 Hz. Au-dessous du plan de descente, le
taux de modulation du 150 Hz est supérieur à celui du 90 Hz et
inversement au-dessus du plan. La différence de taux permet d'en
déduire un écart qui est affiché sur le récepteur
de bord.
Ils assurent un plan de descente réglable et
généralement de l'ordre de 3° (entre 2,5 et 3,5).
Le diagramme de rayonnement est ouvert d'environ 16° dans le
plan horizontal et 7° dans le plan vertical.
Le faisceau du glide n'est plus exploitable à partir de
15m (50ft). Pour les atterrissages automatiques l'avion est guidé par
les informations de la radiosonde et du vario.
Apres avoir mis en place ces équipements, pour assurer une
bonne navigation aérienne, des données météos sont
nécessaires.
De ce fait, l'agence en collaboration aves Corobor, Intelsat,
Coris... ont mis en place des systèmes permettant d'avoir des
données météos avec précision. D'où la
nécessité du quatrième chapitre.
Chapitre 4 : présentation du système
CIBUS
4.1 généralité
CIBUS est un réseau de terrain (BUS) destiné
à assurer l'acheminement de données météorologiques
(sous forme numérique), depuis un ou plusieurs capteurs interactifs (CI)
vers un concentrateur de données.
Cet acheminement est réalisé au moyen d'une
collecte fonctionnant sous le contrôle d'un protocole
d'interrogation/réponse normalisé. Le maître de la collecte
est le concentrateur qui lance cycliquement des requêtes vers les
capteurs interactifs (esclaves). Un capteur interactif est donc un
système intelligent, capable d'acquérir localement un ou
plusieurs paramètres météorologiques et de répondre
aux sollicitations du concentrateur. Il peut également être pourvu
d'une capacité de traitement lui permettant de délivrer des
données élaborées.
4.2 architecture
L'architecture du réseau est organisée d'u
pivot-cibus-8V qui assure la propagation bidirectionnelle des données en
mode étoile (8 branches maximum). Chaque branche du réseau peut
être de type court ou long distance :
4.2.1 Branche courte distance
La transmission est assurée par des coupleurs de type
V24 qui permettent de raccorder sur un pivot-cibus-8V des capteurs CIBUS
à sortie V24 installés à proximité immédiate
de ce pivot.
4.2.2 Branche longue distance
La transmission est assurée par des modems FSK -Type
V23 pour lignes spécialisées privées garantissant une
forte immunité au bruit, et une bonne sensibilité (-36 dbm
typiquement).
La portée d'une liaison est de 10Km maximum, et le
fonctionnement dans des conditions d'environnement difficiles (faibles
consomation-typiquement < 5mA et gamme étendue de température
typiquement -40°C à +70°C) est assuré.
Les équipements d'aide à la navigation
et de l'atterrissage 29
Toute branche longue distance peut être
éclatée vers 5 voies maximum dans une station de parc (type MIRIA
5p) lorsque celle-ci est équipée d'un modem MRIA-CIBUS (pour
connexion vers pivot-cibus-8V), et de pivot-cibus-1V ou de cartes
conditionneurs MIRIA (pour connexion sur capteurs interactifs ou capteurs
traditionnels).
Cependant l'ASECNA utilise le « MES SER-SADIS comme outils
pour répondre aux besoins nécessaires dans le domaine de la
météorologie.
4.3 MESSIR SADIS
4.3.1 Principe de fonctionnement Le MESSIR-SADIS
a pour fonction :
+ Réception des données SADIS transmises par le
récepteur.
+ Stockage, visualisation, impression des observations et des
prévisions (METAR, TAF...)
+ Stockage, visualisation, impression des cartes au format T4
(SIGWX, vent/température)
+ Stockage, visualisation, impression des sorties de
modèle numérique WAFCL London
+ Stockage, visualisation, impression de vol comprenant des
observations, prévisions, cartes T4, cartes issues de modèle
WAFCL London adapté aux vols définis par l'administrateur.
4.3.2 Configuration matérielle


INTELSAT 904
60°EST
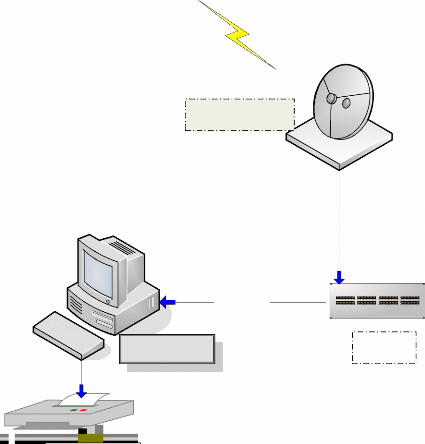
Antenne parabolique
diametre 2,4m
6U
Liaison X25
MESSIR-SADIS
Recepteur
SADIS
ImpImprimante Laser
Figure 4: configuration matérielle.
La configuration MESSIR-SADIS comprend :
> 1 antenne parabolique de diamètre 2,4 m ;
> 1 récepteur SADIS MATRA MARCONI ;
> 1 Pc d'exploitation relié à une imprimante
Laser.
Le système d'exploitation de la station SADIS est Windows
NT
Les processus de réception des données et le menu
principal sont lancés automatiquement.

Consultation des
Warnings
Monitoring sur
la réception
X25
Consultation
des TAF
Consultation
SIGMET
Configuration
(zone,
préference...)
Consultation
METAR/
SPECI
Affichage des données
de modèle
WAFC
London
Consultation
des bultins
Figure 5: menu principal du MESSIR
Le dossier de VOL est constitué de :
> SIGMET
> SIGMET cyclone
> Amendement de carte T4 > AIREP spécial
> Avis de cyclone tropical
> Avis de cendres volcaniques > Message administratif

En somme, l'ASECNA, en termes de navigation dispose des
équipements de plus en plus sophistiqués. Ouvrant pour une grande
sécurité de la navigation dans son espace aérien, l'ASECNA
dans le cadre de sa participation active au groupe d'étude GNSSAFI,
s'est mise à l'heur des systèmes de navigation aérienne
les plus performants. L'agence procède à l'expérimentation
des procédures RNAV-GNSS avec le contrôle en vol par des testes en
vol des procédures par son avion calibration ATR42, équipé
d'un banc d'essai avec toutes les fonctions GNSS. A l'heur actuelle, ce
système de navigation par satellite est en exploitation progressive et
régulière sur la plus part des ses aérodromes grâce
à l'adoption par certains de ses Etats membres des textes nationaux y
afférent.
Les procédures RNAV-GNSS avec guidage vertical sont
conçues et expérimentées depuis peu à Dakar et en
Afrique centrale avec des stations RIMS.
Rentrant dans le cadre de la première phase de la
stratégie GNSS-AFI, la mise en oeuvre d'un banc de teste GNSS à
Dakar sera suivi d'un déploiement en Afrique de 4 à 5 stations
GNSS mobile une station RIMS et les équipements associés pour les
sites de Dakar.
Pour mener à bien ces prestations dans la navigation,
l'ASECNA a des partenaires qui fournissent des équipements et logiciels
permettant de maintenir le bon fonctionnement du processus de la navigation
aérien. Parmi eux, on peut citer Intelsat, Coris, Corobor...et nous
constatons que dans les temps avenir, cette dépendance peut causer des
sérieux problèmes pour l'Agence.

Bibliographie
ASECNA Sadis-Manuel Utilisateur
Système CUBUS notice technique
ILS 381 Volume I Thomson-CSF division Système
défense et contrôle. DME 721 Volume I Thomson-CSF Division
Système défense et contrôle VOR L 6739 Volume I Thomson-CSF
Division Système défense et contrôle
Webographie
www.aerocontact.com
www.aeronautiquemilitaire.ifrance.com
www. icao. i nt/fr
www.asecna.aero

| 

