III - Machine à déplacement
unidirectionnel :





1 - Schéma de &a machine :
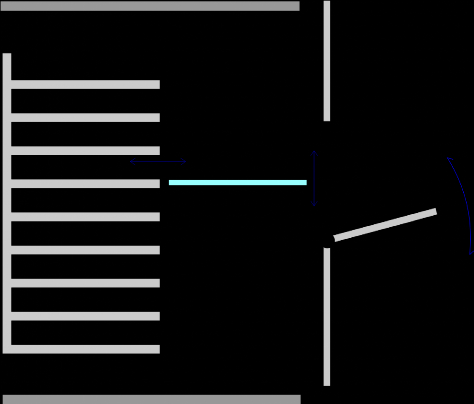
Fig. 3 : Schéma (2D) de la machine
à
déplacement unidirectionnel
2 - Introduction au fonctionnement de &a
machine :
Le magasin automatique comporte des cases dans l esquelles
sont rangées les plateaux contenant l es articles stockés (voir
schéma en dessus). Lors du fonctionnement de la machine, le chariot se
déplace verticalement jusqu'à la position du plateau
recherché, puis il le fait sortir jusqu'à sa sortie
complète et il le fait descendre vers ce qu'on a appelé « la
position de travail ».


La position de travail est le niveau dans lequel s'arrrte le
chariot portant le plateau pour qu'un ouvrier vienne y chercher les articles
voulus sans, ni s'incliner, ni utiliser une échelle, ceci
évidement pour des raisons d'ergonomie de la machine. La position de
travail a été fixée à 1 m20 à parti r du
sol.
3 - Connexions et synoptique de la
machine :
La machine est commandée par un API, qui est
commandé à son tour par une application exécutée
sur ordinateur grâce à une connexion à travers le port
RS-485. L'automate, jouant le rôle d'interface entre l'ordinateur et les
actionneurs, il traduit les ordres de l'ordinateur envoyés à
travers les registres « M » de l'automate en des sorties vers les
moteurs électriques qui vont, en fonctions des ordres transmis, faire
monter, descendre, sortir une rangée, la faire entrer ou encore, ouvrir
la porte de la machine. L'application sur ordinateur liée à une
base de données contenant les positions verticales de chaque plateau, et
avant de donner n'importe quel ordre de déplacement, elle compare la
position du plateau voulue avec la position actuelle du chariot donnée
par un codeur connecté à l'ordinateur et qui lit en permanence la
valeur de la position du chariot. Donc finalement la raison d'existence du
codeur installé sur le chariot n'est rien d'autre que la livraison
permanente d'une information précise (au millimètre près)
relative à sa position verticale.
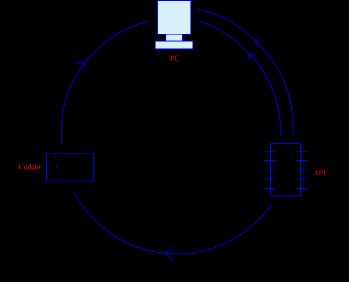
Fig. 4 : Schéma de transmission de
données de la machine à
déplacement
unidirectionnel

Dans ces conditions de travail, l'automate ne travaille que
sous les ordres de l'ordinateur, néanmoins l'initialisation*
de la machine au début, notamment la descente à la position
zéro au démarrage et l'initialisation du compteur se font
automatiquement sans intervention de l' ordinateur.
* Initialisation : Lors du fonctionnement normal de la
machine, il se peut qu'il y ait une coupure de courant brusque on un
disfonctionnement inattendu« puis un arrrt de la machine là
où elle était sans que l'ordinateur connaisse sa position. Donc
une initialisation de la machine est indispensable pour mettre en phase
l'ordinateur et l'automate au départ. L'initialisation de la machine
consiste en un déplacement du chariot vers la position la plus basse de
la machine appelée position zéro et la remise à
zéro du compteur afin qu'elle soit prrte.
Remarque :
Afin d'éviter les problèmes d'inertie dans le
système, tous les mouvement verticaux sont dotés de deux phases
de déplacement en ralenti : une phase d'accélération au
début du mouvement et une autre de décélérati on
à la fin. Et si jamais, lors de l'arrivée du chariot, il ne
s'arrrte pas à la position voulue pi lepoil, l'ordinateur va
déclencher un ordre de déplacement dans le sens inverse
jusqu'à ce que la différence entre la position du chariot et la
position voulue soit inférieure à une certaine tolérance
près spécifiée par l'utilisateur de l'application.
Synoptique du foncti onnement de la machine
:



Après l'initialisation de la machine, l'automate attend
les ordres de l'ordinateur pour déplacer le chariot. L'ordinateur envoie
premièrement un ordre de déplacement vertical vers la position du
plateau voulu, puis un ordre de sortie du plateau. Une fois le plateau bien
sorti, il envoie encore un ordre de déplacement vers la position de
travail puis un ordre d'ouverture de la porte de la machine. Après la
récupération des pièces contenues dans le plateau
apporté et la fermeture manuelle* de la porte, l'ordinateur
envoie pour une troisième fois un ordre de déplacement vertical
pour rendre le plateau à sa position. Et finalement un dernier ordre
pour faire entrer le plateau à sa place (voir fig. 5).
Fermeture manuelle* : la fermeture de la porte se
fait par appui sur un bouton poussoir pour des raisons de
sécurité (l'ordinateur ne peut pas savoir à quel moment
les articles ont été pris pour envoyer un ordre de fermeture de
la porte).



Ordre de déplacement vertical vers
la
position du plateau

Phase 2
Ordre de sortie du plateau

Phase 3
Ordre de déplacement vertical vers
la
position de travail

Phase 4
Ordre de déplacement vertical vers
la
position initiale du plateau

Phase 5
Ordre d'ouverture de la porte

Phase 6
Fermeture manuelle de la porte

Ordre d'entrée du plateau
Phase 1
Phase 7
Reboucler
Fig. 5 : Phases d'un cycle de fonctionnement de la
machine
à déplacement unidirectionnel

4 - Grafcet général de la machine
:



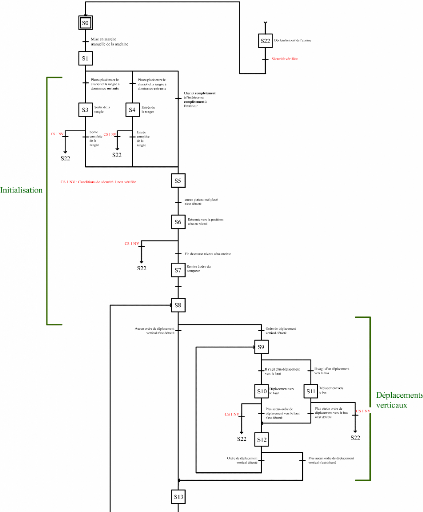

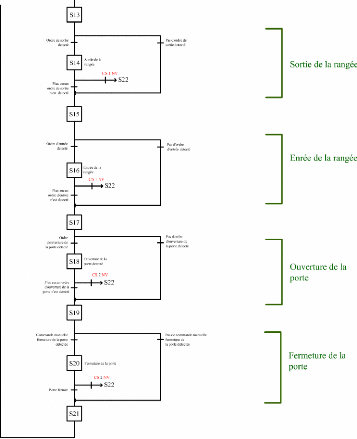

Fig. 6 : Grafet général de la
machine
Explications et Commentaies :
1 - Démarrage et initialisation de la
machine :
Au début de l'exécution du programme de l'automate,
une mise en marche manuel le est nécessai re.

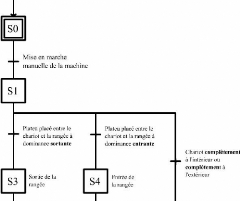

Fig. 7 : Grafcet de démarrage et
initialisation
de la machine
Après cette mise en marche commence la phase
d'initialisation de la machine. Dans cette phase on va tester troi s cas :
|
1er cas : Si le plateau est mal placé sur le chariot
sans qu'un partie ne soit à l'intérieur de la rangée (fig.
8), l'automate va le faire sortir jusqu'à ce qu'il soit bien
placé sur le chariot, puis faire descendre le chariot chargé
à la position zéro.
|
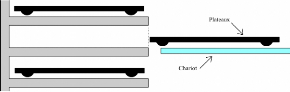
Fig. 8 : Premier cas du positionnement du plateau sur le
chariot lors de l'initialisation

2ème cas : Si le plateau est mal placé sur
chariot avec une partie à l'intérieur de la rangée (fig.
9), l'automate va le faire entrer à l'intérieur de la
rangée, puis faire descendre le chariot vide à la position
zéro.


Fig. 9 : Deuxième cas du positionnement du plateau
sur le chariot lors de l'initialisation
|
3ème cas : Si le plateau est soit bien placé sur
le chariot ou complètement à l'intérieur de la
rangée, la machine va passer directement à la phase de descente
à la position zéro.
|
2 - Fin de l'initialisation et conditions de
sécurité :
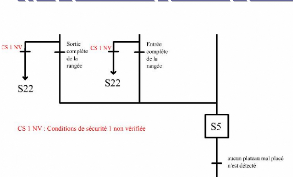

Fig. 10 : Grafcet de fin de l'initialisation
et
conditions de sécurité
Les conditions de passage pour les deux premiers cas sont
respectivement : la sortie de la rangée et son entrée
complètes.
La CS 1 NV (Condition de Sécurité 1 Non
Vérifiée), représente les cas où la machine ne doit
faire aucun mouvement pour des raisons de sécurité. Ces
conditions peuvent être citées dans la liste suivante :

La porte doit être fermée durant tous les
mouvements de déplacement sauf dans la phase d'ouverture de la porte
pour récupérer l'article voulu.



Tous les plateaux doivent être bien placés dans
leurs rangées ou sur le chariot mais pas dans une position i
ntermédiaire.
Le chariot ne doit pas sorti r de sa course verticale
permise.
Remarques :
- Ces conditions de sécurité sont
présentes dans toutes les phases du fonctionnement de la machine. Et si
une d'elles n'est pas vérifiée, il survient immédiatement
un arrêt complet puis un déclenchement de l'alarme (étape
S22 sur le Grafcet).
- Après une initialisation réussie de la
machine, tous les plateaux sont bien placés, donc la raison d'existence
de la deuxième condition est assez floue car avant de passer à un
cycle de fonctionnement normal de la machine, il y avait déjà eu
satisfaction de cette condition. Or lors du fonctionnement normal de la
machine, il se peut qu'il ait une sortie d'un plateau de sa rangée ou
des vibrations anormales qui pourront faire que les plateaux ne soient plus
à leurs places, donc la vérification de cette condition en
permanence en fonctionnement normal est très raisonnable et même
obligatoire pour diminuer le risque d'accidents.
3 - Descente vers la position zéro en ralenti et
remise à zéro





du compteur :

Fig. 11 : Grafcet de descente vers la position
zéro
en ralenti et remise à zéro du
compteur
Après les trois tests que fait l'automate pour
vérifier le bon placement des plateaux, il fait descendre la machine
jusqu'à la position la position zéro (la position la plus basse
de la machine), puis envoie un signal d'initialisation du compteur.

4 - Déplacements verticaux :

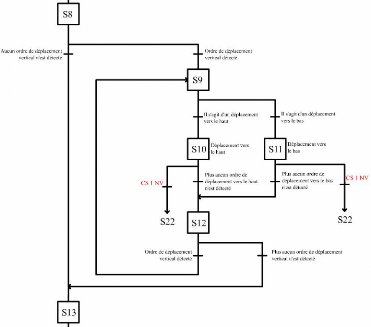

Fig. 12 : Grafcet du déplacement vertical
de
la machine
Dans cette phase (phase de déplacement verticaux), si
l'automate reçoit un ordre de déplacement vertical de
l'ordinateur il procède au mouvement vertical en testant naturellement
deux cas : si le déplacement sera vers le haut ou vers le bas. Le
déplacement est maintenu jusqu'à ce que l'automate ne
reçoit plus d'ordre de déplacement dans le même sens. Si le
sens change, on reboucle à l'étape S9.
Les conditions de sécurité sont toujours
présentes, si une d'elles n'est pas satisfaite, on un passage direct
à l'étape S22 puis déclenchement de l'alarme.

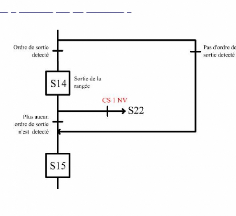
5 - Sortie de I a rangée :
Fig. 13 : Grafcet de sortie de la
rangée

Après I es dépI acements verticaux
nécessaires, vient I a phase de sortie de I a rangée si un ordre
de sortie de I a rangée envoyé par ordi nateur a
été détecté.
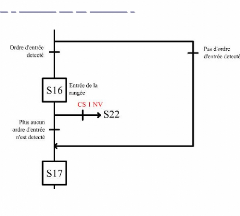
6 - Entrée de I a rangée :
Fig. 14 : Grafcet d'entrée de la
rangée
Dans cette phase se fait la détection des ordres
d'entrée de
I a rangée.

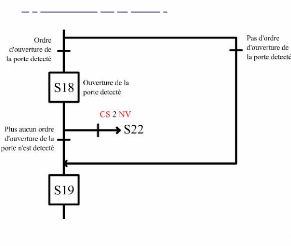
Fig. 15 : Grafcet d'ouverture de la porte
7 - Ouverture de la porte :

De même que les autres parties du Grafcet, là se
fait l'ouverture de la porte.
Dans cette partie les conditions de sécurité
qui doivent être vérifiées ne vont pas être les
mêmes car on peut pas parler de condition de sécurité
relative à la fermeture de la porte dans une phase où se fait
l'ouverture de cette dernière. Ainsi les conditions de
sécurité devant êtres satisfaites vont être :


Tous les plateaux doivent être bien placés dans
leurs rangées ou sur le chariot mais pas dans une position i
ntermédiaire.
Le chariot ne doit pas sortir de sa course verticale permise.

8 - Fermeture de la porte :
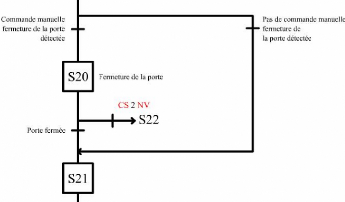


Fig. 16 : Grafcet de fermeture manuelle de la
porte
De même que la partie relative à l'ouverture de la
porte les conditions de sécurité sont :


Tous les plateaux doivent être bien placés dans
leurs rangées ou sur le chariot mais pas dans une position i
ntermédiaire.
Le chariot ne doit pas sortir de sa course verticale permise.
9 - Alarme :
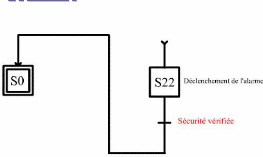
Fig. 17 : Grafcet de déclenchement de l' alar
me
C'est la phase à laquelle mène toute
insatisfaction d'une des conditions de sécurité durant toutes les
phases de fonctionnement de la machine. L'alarme est déclenchée
jusqu'à une nouvelle satisfaction de toutes les conditions de
sécurité puis survient une initialisation du programme.
| 

