|
|
|
REPUBLIQUE DU
******
Paix-Travail
******
MINISTERE L'ENSEIGNEMENT ******* UNIVERSITE
Mémoire de fin
Supérieure
Stage effectué
Encadreurs industriels
|
CAMEROUN -Patrie
DE
SUPERIEUR
DE DOUALA
ECOLE NATIONALE SUPERIEURE POLYTECHNIQUE
BP : 2701 DOUALA
TEL : +(237) 697542240
E-MAIL :
contact@enspd-udo.cm
Division de la scolarité et
Service de la formation par alternance et
|
REPUBLIC OF CAMEROON
******
Peace-Work-Fatherland
******
MINISTRY OF HIGHER
EDUCATION
******
UNIVERSITY OF DOUALA
|
|
|
DE DOUALA
des études
de l'insertion professionnelle
|
|
THEME
ELECTROGENES
d'études en
Filière Option
:
du 14
:
|
Polytechnique
SEUKO
vue de l'obtention du Diplôme d'Ingénieur de Douala
(ENSPD) de l'Université : Génie Automobile et
Mécatronique : Ingénierie des Systèmes
Mécatroniques
MONITORING DES GROUPES DE L'IMMEUBLE PAD
Février au 30 Juin 2024 au
Port
Par
NJABO MARIE THERESE
|
à l'Ecole Nationale de Douala
SIEGE DU
Autonome de Douala
Encadreurs Académiques :
|
|
Mr EPOH KEM Maxime Mme NGO NYECK
|
Pr AYISSI Merlin
Mr MAH CHARITOS
|
|
Année académique 2023-2024
|
|
I
|
|
|
DEDICACE
II

III
REMERCIEMENTS
Nous manifestons toute notre gratitude et notre reconnaissance
à l'endroit de tous ceux qui, de près ou de loin ont
contribué à la rédaction de ce mémoire de fin
d'étude et qui ont été d'un apport remarquable et
indéniable dans notre formation. Notre MERCI va tout
particulièrement à :
· Pr MOUANGUE Ruben Martin, Directeur de l'Ecole Nationale
Supérieure Polytechnique de Douala, pour avoir mis tous les moyens
nécessaires pour le bon déroulement de notre formation à
l'ENSPD ;
· M. Cyrus NGO'O, Directeur Général du Port
Autonome de Douala pour nous avoir accordé le stage dans sa structure
;
· Nos encadreurs académiques pour le
dévouement et la rigueur dans le travail ;
· Nos encadreurs industriels pour le suivi, les
connaissances et le soutien ;
· M. EPOH MAXIME pour le suivi, l'encadrement, les conseils
et les connaissances ;
· Mme NGO NYECK pour le soutien et l'accompagnement ;
· Pr AYISSI pour son accompagnement tout au long de notre
formation ;
· Mr MAH CHARITOS pour l'encadrement tout au long de notre
parcours ;
· Dr IDELETTE SOM pour sa disponibilité, ses
enseignements et surtout sa souciance.
· Nos parents, M. et Mme NJABO pour les conseils, leur
assistance morale et financière ;
· M. KAMGAING pour son soutien indéniable.
· Tout le corps enseignant et personnel d'appui de l'ENSPD
pour toutes les connaissances et contributions intellectuelles qu'ils nous ont
donné durant ces années de formation.
IV
RESUME
Le présent travail consiste à élaborer
un système de surveillance permettant de visualiser les
paramètres critiques des groupes électrogènes, ceci dans
le but de prévenir les potentielles pannes et de réduire les
rondes. En effet, le Port Autonome de Douala inscrit dans sa politique
qualité trois grands axes stratégiques à savoir la
performance, l'attractivité et la compétitivité. Le
Directeur général de la structure propose ainsi plusieurs leviers
sur lesquelles chaque acteur peut jouer pour pouvoir atteindre les objectifs
fixés notamment la modernisation des installations. C'est donc de
là que nait notre projet de fin d'études portant sur le
monitoring du parc de groupes électrogènes. Les principaux
défis rencontrés avant le lancement de ce projet incluaient des
difficultés à surveiller l'état des groupes
électrogènes en temps réel, ce qui entraînait des
retards dans la détection des problèmes, des pannes inattendues,
ainsi que des rondes excessives du personnel de SOPRIM (prestataire au PAD pour
la gestion des groupes électrogènes). Face à ces enjeux,
le projet vise à mettre en place un système de monitoring
permettant une télémétrie en temps réel, une
configuration des alertes efficace, un diagnostic d'anomalies précis, et
la génération des statistiques. Ces améliorations
s'inscrivent dans les objectifs principaux qui sont de réduire dans un
premier temps les rondes, ensuite les coûts de maintenance en optimisant
les interventions du personnel, et enfin augmenter la sécurité en
détectant les problèmes à l'avance pour éviter les
arrêts inattendus des groupes électrogènes. Pour mener
à bien ce travail, nous sommes partis de l'état des lieux pour
l'identification du besoin et des contraintes. Nous avons poursuivi avec une
étude de la faisabilité du projet qui a débouché
sur un cahier de charge fonctionnel et enfin, nous avons utilisé les
outils de conception et de programmation appris en cours. Au terme du projet,
nous avons déployé notre application NMT et sa passerelle qui
désormais sont utilisés au PAD pour le suivi des groupes
électrogènes de l'immeuble siège.
Mots clés : Groupe
électrogène, Télégestion, Application mobile,
Rondes, Modbus, Monitoring.
ABSTRACT
This work consists in developing a monitoring system to
visualize the critical parameters of generators, with the aim of preventing
breakdowns and reducing patrols. Indeed, The Port Authority of Douala includes
three major strategical axes with are: performance, attractiveness and
competitiveness. The Director General of this structure thus proposes several
levers on which each actor can play to be able to achieve the objectives set,
exceptionally the modernization of the installations. This is where our
end-of-studies project relating to the monitoring of the generator fleet take
place. The main challenges encountered before the launch of this project
included difficulties in monitoring the status of the generator sets in real
time, which led to delays in detecting problems, unexpected breakdowns, as well
as excessive rounds of SOPRIM staff (service provider to the PAD for the
management of generators). Faced with these challenges, the project aims to set
up a monitoring system allowing real-time telemetry, efficient configuration of
alerts, precise diagnosis of anomalies, and the generation of detailed monthly
reports. These improvements are part of the main objectives which are to
firstly reduce rounds, then maintenance costs by optimizing personnel
interventions and finally increase safety by detecting problems in advance to
avoid unexpected stoppages of generators.
To carry out this work, we started from the inventory to
identify the needs and constraints. We continued with a study of the
feasibility of the project which resulted in functional specifications and
finally, we used the design and programming tools learned in class. At the end
of the project, we deployed our NMT application which is now used at PAD to
monitor the generators in the headquarters building.
V
Keywords: Generator,
Remote management, Mobile application, Round, Modbus, Monitoring.
VI
SOMMAIRE
DEDICACE II
REMERCIEMENTS III
PRESENTATION DE L'ENTREPRISE I
RESUME IV
ABSTRACT V
GLOSSAIRE VIII
LISTE DES FIGURES IX
LISTE DES TABLEAUX XI
INTRODUCTION GENERALE 1
CHAPITRE I : REVUE DE LA LITTÉRATURE
4
INTRODUCTION 4
I. GENERALITES SUR LE MONITORING 4
I.1 DEFINITIONS DES CONCEPTS 4
I.2 HISTORIQUE DES SYSTEMES DE SURVEILLANCE
5
I.3 LES DIFFERENTS TYPES DE SURVEILLANCE «
MONITORING » 6
I.4 MÉTHODES DE SURVEILLANCE 7
I.5 PRINCIPES DU MONITORING 10
I.6 LES AVANTAGES DU MONITORING 12
II. GENERALITES SUR LES GROUPES ELECTROGENES
13
II.1 DEFINITION 13
II.2 PRESENTATION D'UN GROUPE ELECTROGENE 13
II.3 PRINCIPE DE FONCTIONNEMENT 15
II.4 TYPOLOGIE DES GROUPES ELECTROGENES 16
II.5 CARACTERISTIQUES DU GROUPE ELECTROGENE
17
III. GENERALITES SUR LE MODBUS 18
III.1 DEFINITION 18
III.2 STRUCTURE DES MESSAGES DANS LE MODBUS
19
III.3 LES FONCTIONS MODBUS 19
III.4 MODE DE FONCTIONNEMENT DU MODBUS 20
IV. GENERALITES SUR LES APPLICATIONS MOBILES
21
IV.1 DEFINITION 21
IV.2 HISTORIQUE SUR LES APPLICATIONS MOBILES
21
IV.3 DIFFERENTS TYPES D'APPLICATION MOBILE
22
IV.4 LES CARACTERISTIQUES D'UNE APPLICATION MOBILE
22
VII
V. CONTEXTE ET PROBLEMATIQUE 23
CONCLUSION 24
CHAPITRE II : MATERIEL ET METHODES 26
INTRODUCTION 26
I. MATERIEL 26
I.1 GROUPES ÉLECTROGÈNES DE L'IMMEUBLE
SIÈGE DU PAD 26
I.2 RESSOURCES MATERIELLES 28
I.3 RESSOURCES LOGICIELLES 34
II. METHODES 36
II.1 CHOIX DES PARAMETRES A MONITORER 37
II.2 CONCEPTION MATERIELLE 39
II.3 CONCEPTION LOGICIELLE 54
CONCLUSION 59
CHAPITRE III : RESULTATS ET DISCUSSION 61
INTRODUCTION 61
I. CHOIX DES PARAMETRES A MONITORER 61
II. RESULTAT DE LA CONCEPTION MATERIELLE 63
II.1 PRESENTATION DE LA CARTE ELECTRONIQUE FABRIQUEE
63
II.2 PRESENTATION DU BOITIER DE PROTECTION
71
III. RESULTAT DE LA CONCEPTION LOGICIELLE 73
III.1 RESULTAT DE LA PROGRAMMATION DU MICROCONTROLEUR
73
III.2 RESULTAT DE LA PROGRAMMATION DE L'INTERFACE
GRAPHIQUE 75
IV. ANALYSE DES COUTS 83
IV.1 COUT DU PROJET 83
IV.2 COUT DU PRODUIT EXISTANT SUR LE MARCHE
83
IV.3 COUT DU PRODUIT PROPOSE 84
CONCLUSION 84
CONCLUSION GENERALE 85
ANNEXES i
REFERENCES BIBLIOGRAPHIQUES vi
VIII
GLOSSAIRE
API
|
Application Programming Interface
|
APM
|
Application Performance Monitoring
|
APTE
|
Application aux Techniques d'Entreprise
|
EDA
|
Electronic design automation
|
EIA
|
Electronic Industries Alliance
|
GE
|
Groupe électrogène
|
IOT
|
Internet on Things
|
LED
|
Light-emitting diode
|
MQTT
|
Message Queuing Telemetry Transport
|
PAD
|
Port Autonome de Douala
|
PLA
|
Polylactic Acid
|
REST
|
Representational State Transfer
|
RTU
|
Remote terminal unit
|
SADT
|
Structured Analysis and Design Technique
|
UML
|
Unified Modeling Language
|
|
IX
LISTE DES FIGURES
Figure 1: Organigramme du PAD ii
Figure 2: Situation géographique du PAD iii
Figure 3: Différents types de surveillance [5] 6
Figure 4 : Classification des méthodes de surveillance
[6] 8
Figure 5: Principe du monitoring [7] 10
Figure 6: Structure de l'acquisition numérique [8]
11
Figure 7: Description générale d'un groupe
électrogène avec capot de protection [9] 14
Figure 8: Principe de fonctionnement du groupe
électrogène 15
Figure 9: Structure du protocole MODBUS [11] 18
Figure 10: Structure d'un message dans le protocole MODBUS
[11] 19
Figure 11: Format d'une trame en mode RTU [11] 20
Figure 12: Format d'une trame en mode TCP [11] 21
Figure 13: GE IGH 26
Figure 14 : Actigramme A0 du Groupe électrogène
27
Figure 15: Actigramme A-0 du Groupe électrogène
27
Figure 16: Présentation de l'APM 403 [14] 28
Figure 17: Ordinateur portable DELL 29
Figure 18: Présentation de l'ESP32 29
Figure 19: Module MAX485 30
Figure 20: module GSM SIM800L 31
Figure 21: SIM Orange 32
Figure 22: Module radio NRF24L01 32
Figure 23: fils de connexion 32
Figure 24: Imprimante 3D Kingroon 33
Figure 25: IDE Arduino 34
Figure 26: interface EasyEDA 35
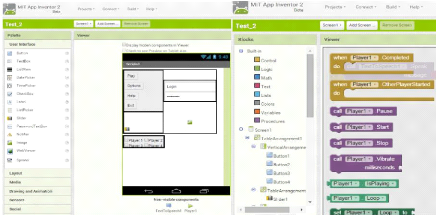
Figure 27: Interface APP INVENTOR 35
Figure 28: Interface SolidWorks 36
Figure 29: Synoptique de la méthodologie
utilisée 39
Figure 30: Structure de l'analyse fonctionnelle [16] 40
Figure 31: Phases de l'analyse du besoin [16] 40
Figure 32: Diagramme Bête à cornes [17] 43
Figure 33: diagramme bête à cornes
appliqué au système 43
Figure 34: Phases de l'étude de la faisabilité
[18] 45
Figure 35: Diagramme Pieuvre[19] 45
Figure 36: Résultat du diagramme pieuvre 46
Figure 37: Diagramme FAST [20] 49
Figure 38: Résultat Diagramme FAST 50
Figure 39: paramétrage de la communication sur le GE
SIMAR 52
Figure 40: Présentation des sorties de l'APM403 [22]
52
Figure 41: Schéma synoptique du fonctionnement de
notre système 54
Figure 42: Structure linéaire et alternative [23]
56
Figure 43: Structure itérative [23] 56
X
Figure 44: Exemple simplifié d'un diagramme de cas
d'utilisation [24] 59
Figure 45: Câblage de l'ESP32 64
Figure 46: Bloc d'alimentation 64
Figure 47: câblage des boutons reset et boot 65
Figure 48: Câblage du module radio NRF24L01 65
Figure 49: Câblage du MAX485 66
Figure 50: câblage de la communication série
66
Figure 51: câblage des LED du circuit. 67
Figure 52: Vue de dessus de notre carte 67
Figure 53 Vue de dessous de notre carte 68
Figure 54: Vue 2D de notre carte électronique 68
Figure 55: Vue de dessous 69
Figure 56: Vue de dessus 69
Figure 57: Vue de dessous 70
Figure 58: Vue de dessus 70
Figure 59: Boitier de protection sur SolidWorks 71
Figure 60: Boitier imprimé 71
Figure 61: Résultat de l'algorigramme 73
Figure 62: Diagramme des cas d'utilisation lors de la
communication sur le bus 75
Figure 63: Résultat du diagramme des cas d'utilisation
76
Figure 66: Choix du paramètre à visualiser
77
Figure 66: Page d'accueil 77
Figure 66: Choix du GE 77
Figure 69: Capteurs 78
Figure 69: Alternateur 78
Figure 69: Statistiques 78
Figure 71: Identification du GE 79
Figure 71: Maintenance 79
Figure 74: Mode du GE 79
Figure 74: Liste des Alarmes 79
Figure 74: Entrées et sorties logiques 79
Figure 75: Visualisation des capteurs 80
Figure 76: Visualisation du mode 81
Figure 77: Visualisation du courant Alternateur 81
Figure 78: Visualisation des sorties 82
Figure 79: Visualisation des entrées 82
Figure 80: Fiche de travaux informatiques iii
Figure 81: Extrait de la table Modbus des AMP iv
Figure 82: Extrait du datasheet de l'AMP403 iv
Figure 83: Extrait du datasheet de l'ESP32 v
Figure 84: Extrait du datasheet du max485 v
XI
LISTE DES TABLEAUX
Tableau 1: Historique du PAD
i
Tableau 2: Adresse du PAD i
Tableau 3: Infrastructures et postes de transformation
Erreur ! Signet non défini.
Tableau 4 : Légende 14
Tableau 5: Les caractéristiques des groupes
électrogènes 17
Tableau 6: fonctions Modbus 19
Tableau 7: Historique des applications mobiles [12] 21
Tableau 8: Caractéristiques des groupes
électrogènes 26
Tableau 9: Caractéristiques de l'imprimante 3D 33
Tableau 10: Illustration AMDEC [15] 38
Tableau 11: Méthode QQOQCP[16] 41
Tableau 13: méthode QQOQCP 42
Tableau 14: Validation du besoin 44
Tableau 15 : Caractérisation des fonctions de service
du dispositif de monitoring 47
Tableau 16: Cahier des charges fonctionnelles techniques
48
Tableau 12:Méthode WSM 51
Tableau 17: Coût du projet 83
1
INTRODUCTION GENERALE
Le groupe électrogène est un appareil dont le
rôle principal est de fournir de l'énergie électrique de
façon autonome. Il y'a quelques années encore, il n'était
utilisé qu'en cas de panne de courant. Cependant, le scénario est
très différent aujourd'hui, avec la croissance des applications
critiques portée par l'informatisation accrue de tous les secteurs
industriels, tant administratifs que productif. L'industrie des groupes
électrogènes a beaucoup évolué et les applications
sont très variées. De nos jours, l'alimentation électrique
permanente est nécessaire dans plusieurs secteurs d'activités
tels que les hôpitaux, les services publiques,
etc. il y'a donc nécessité de
disposer des groupes électrogènes de haute fiabilité qui
soit surveiller à distance afin d'anticiper sur tout
désagrément.
Concernant le Port Autonome de Douala, il dispose d'un parc
de groupe électrogène qui répond au besoin d'alimentation
électrique des différents sites du PAD en cas de coupure ou de
disfonctionnement du secteur. L'arrêt brusque des groupes
électrogènes en cas de sollicitation, entraine un arrêt des
activités ceci ayant de lourdes conséquences aux vues de la
sensibilité des activités du secteur portuaire.
Particulièrement l'année dernière, après coupure du
secteur, les groupes électrogènes n'ont pas
démarré, plongeant ainsi dans l'obscurité l'immeuble
siège du PAD pendant plus d'une heure. Cet incident a suscité
l'attention du personnel sur le suivi des groupes électrogènes.
Ainsi donc l'on s'interroge sur comment faire pour ne plus subir les pannes des
groupes électrogènes ?
Jusqu'à présent, la solution adaptée par
l'entreprise consiste à effectuer des rondes hebdomadaires pour checker
les paramètres de fonctionnement des groupes électrogènes.
Cependant ; avec les coupures d'énergie qui sont de plus en plus
récurrentes, les rondes s'accentuent.
Conscient de la place importante qu'occupe les
générateurs pour le bon déroulement de ses
activités, aux vues des limites que présentent jusqu'ici les
solutions adoptées, et des dépenses qui s'élèvent
à environ 10 millions FCFA (maintenance corrective et achat des
pièces de rechange) pour les groupes de 550 KVA de l'immeuble
siège, le Département de Gestion du Patrimoine du PAD nous a
confié le travail de : Monitoring des groupes
électrogènes de l'immeuble siège du PAD.
Les objectifs de ce travail sont de mettre en place une
télémétrie des paramètres critiques de
fonctionnement des groupes électrogènes (température
moteur, pression d'huile du moteur,
2
niveau de carburant, tension de la batterie, puissance active
et vitesse) ; de configurer les alertes et de générer les
statistiques.
Pour mener à bien ce travail, nous allons le
structurer ainsi qu'il suit : Dans le 1er chapitre, nous ferons une revue de la
littérature sur les systèmes de surveillance des groupes
électrogènes. Ensuite dans le second chapitre, nous
présenterons le matériel utilisé pour la
réalisation de notre système ainsi que les méthodes de
conception de la partie matérielle (méthode des Applications aux
Techniques d'Entreprises) et de la partie logicielle (méthode du langage
de modélisation unifié) de notre solution. Enfin dans le dernier
chapitre, nous présenterons les résultats obtenus et nous
discuterons.
3

4
CHAPITRE I : REVUE DE LA LITTÉRATURE
INTRODUCTION
Ce premier chapitre a pour but de familiariser le lecteur
avec la terminologie et le langage technique utilisé dans la suite.
Ainsi donc, nous ferons d'abord une revue de la littérature sur les
différents concepts autour desquels s'articule notre travail ; ensuite
nous présenterons le contexte et la problématique pour enfin
chuter par les objectifs de notre étude.
Démarrons par une revue sur le monitoring afin de mieux
cerner ce concept.
I. GENERALITES SUR LE MONITORING
I.1 DEFINITIONS DES CONCEPTS
· Le Monitoring est l'anglicisme du
terme surveillance. D'après le dictionnaire Robert, la
surveillance est le « Fait de surveiller ; ensemble des actes par lesquels
on exerce un contrôle suivi ». [1]
· Un système est un ensemble
d'éléments interagissant entre eux selon certains principes ou
règles dans le but de réaliser une fonction précise.
[2]
· Dans le cadre industriel, le monitoring est encore
appelé surveillance des systèmes industriels. Il
s'agit donc d'une technique de contrôle industrielle, de suivi et de
pilotage informatique des méthodes et procédés de
production. Dans notre travail, ce qui nous intéresse est la
surveillance à distance des systèmes et donc, nous allons
introduire un nouveau concept qu'est le RMM (Remote Monitoring and
Management).
· La surveillance et la gestion à
distance (RMM) est une technologie utilisée pour observer et
entretenir à distance les appareils intelligents liés à
l'Internet des objets (IoT). La surveillance est essentielle pour garantir une
utilisation efficace des ressources et prévenir les pannes. [4]
· La télégestion est la
solution permettant d'interagir avec des systèmes ou sites industriels
à distance. Elément clé dans de nombreux domaines
(industrie, eau, environnement, énergie,
télécommunication, transport...), la télégestion
permet de surveiller des sites (installations,
systèmes...), de transmettre des informations
(données, historiques, pannes, fuites...) et de faire du
pilotage à distance (par exemple déclencher des
commandes de vannes...). Elle vise à récupérer à
distance une information qui fera l'objet d'un traitement en fonction de son
type et de sa valeur, sanctionnée par une prise de décision.
·
5
Télémétrie : est la
collecte in situ des mesures ou d'autres données à des points
éloignés et leur transmission automatique à un
équipement de réception ( télécommunication ) pour
la surveillance. Le mot est dérivé des racines
télé, « à distance » et
métron, « mesure ». [3]
I.2 HISTORIQUE DES SYSTEMES DE SURVEILLANCE
Le premier système de surveillance consistait à
mettre un thermomètre à l'intérieur d'un
congélateur puis à relever les enregistrements sur papier.
Cependant, en cas de défaillance du congélateur, le
problème n'était pas découvert avant la fois suivante
où quelqu'un vérifiait le thermomètre. Par mesure de
sécurité, il fallait prévenir le pire. Ainsi donc, en
1888, William Henry Bristol, J. C invente le premier enregistreur graphique. En
1951, Stevens brevète le premier enregistreur de diagrammes
environnementaux. Ces enregistreurs permettaient d'améliorer la gestion
des environnements contrôlés en générant un
enregistrement de la température en fonction du temps. L'innovation
faite ici résidait dans le fait, qu'un coup d'oeil sur le graphe
permettait de savoir le combien de temps l'environnement avait
été hors spécification. On pouvait avoir ainsi une
idée de l'ampleur du dommage. Bien que constituant une grande
amélioration par rapport à la méthode du
thermomètre et du crayon/papier, ils nécessitaient aussi beaucoup
de maintenance - réparation des pièces usées ou
endommagées, changement de rouleau de papier, de stylos et d'encre,
archivage et stockage des graphes pour consultation ultérieure. Les
enregistreurs de données électroniques ont pris le relais et
amélioré les enregistreurs graphiques. Comme ces derniers, ils
génèrent un enregistrement de la température mais ne
notifient pas immédiatement les défaillances. Ils
présentent l'avantage d'avoir besoin d'une maintenance plus
réduite et de produire un enregistrement de la température
sauvegardé sous forme électronique et par conséquent
facilitant le stockage, la consultation ultérieure et le classement des
données. De nos jours, les systèmes de surveillance en continu
modernes (désignés par le sigle anglais CMS pour Modern
continuous monitoring system) ont changé la façon de
protéger les produits sensibles. Un CMS permet de collecter les
données de température en continu, de créer un
enregistrement permanent des données sous un format conforme à la
réglementation et d'alerter instantanément en cas de tendance au
dépassement de la limite de température dans un
congélateur pour le produit stocké. Un CMS peut être
utilisé pour surveiller d'autres paramètres, par exemple
l'humidité relative et la pression différentielle. Presque
n'importe quel appareil comportant une sortie numérique peut y
être raccordé. De plus, un CMS ne demande aucun rituel de lecture
quotidien, aucun graphe à charger, aucun enregistreur à charger.
Comme la plupart des innovations, le CMS fait gagner
du temps, réduit le risque d'erreur humaine et permet
au personnel de se focaliser sur des questions plus importantes.[4]
I.3 LES DIFFERENTS TYPES DE SURVEILLANCE « MONITORING
»
Nous distinguons deux types de surveillance : la surveillance
du système opérant et la surveillance de la commande. La
surveillance du système opérant se décompose
elle-même en deux types de surveillance à savoir la surveillance
curative et la surveillance prédictive.
Ø Surveillance de la commande
Basée sur la notion de filtre de commande, elle permet
de vérifier que les ordres émis sont conformes à
l'état de la partie opérative. Le concept d'Objet Commandable
Elémentaire (OCE) a été développé pour la
conception de ces filtres de commande.
Ø Surveillance du système
opérant
Elle a en charge la surveillance des défaillances du
procédé qui, dans le cadre de la sureté de fonctionnement,
sont classées en deux catégories : les défaillances
cataleptiques et les défaillances progressive :
- Les défaillances cataleptiques : ce sont les
défaillances soudaines et complètes. Il y a passage, sans
transition d'un état de fonctionnement normal à un état de
panne ;
- Les défaillances progressives : ce sont des
défaillances partielles et graduelles.
La figure suivante présente les différents types de
surveillance.
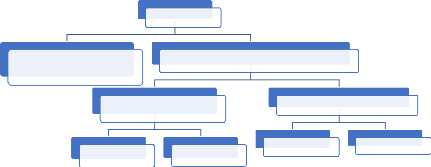
Surveillance de la commande
Directe Indirecte
Surveillance prédictive
Surveillance
Surveillance du système opérant
Directe Indirecte
Surveillance curative
6
Figure 1: Différents types de surveillance
[5]
· 7
La surveillance prédictive
Elle peut être directe ou indirecte, le principe de la
surveillance prédictive direct est fondé sur l'analyse des
signaux, l'analyse des données et sur l'étude des processus
stochastiques pour connaitre l'état réel de
l'élément et évaluer sa durée de vie restante.
La surveillance prédictive indirecte prend en compte tous
les types de matériels ayant des défaillances se manifestant par
une baisse de la qualité ou de la quantité des produits
fabriqués. Elle utilise des paramètres tels que le flux de
production ou la qualité des produits (JER,06).
· La surveillance curative
Elle comporte deux fonctions : la détection et le
diagnostic. La détection est formée dépendante de la
contrainte temps réel. Son rôle est d'analyser le comportement de
la partie opérative pour générer des symptômes en
cas de dysfonctionnement.
Le diagnostic est basé sur un mécanisme
constitué de deux étapes : la première étape
consiste en une localisation du sous-systèmes fonctionnels
défaillants, à partir des symptômes signalés par la
détection. Elle est réalisée par une interprétation
des symptômes au fur et à mesure de leur occurrence. Cette
étape utilise un modèle de connaissance obtenu à partir
d'une analyse fonctionnelle du système à surveiller. Ce
modèle est traduit sous formes de signatures temporelles causales.
La deuxième étape permet l'identification des
causes premières des défaillances ainsi que l'analyse de leurs
conséquences. Elle est basée sur un graphe fonctionnel qui
modélise les relations causales liant les fonctions internes du
système à ses fonctions principales.
I.4 MÉTHODES DE SURVEILLANCE
Il en existe deux catégories : les méthodes de
surveillance avec modèle et les méthodes de surveillance sans
modèle.
En ce qui concerne la première catégorie elle se
base sur un modèle analytique du système à surveiller et
utilise généralement des techniques de l'automatique.
La deuxième catégorie de méthode se
divise en deux sous catégories, la première correspond aux
statistiques de traitement du signal qui sont généralement
qualifiés d'outils de traitement de bas niveau, parce qu'ils sont en
contact direct avec le signal du capteur et ne servent
généralement que pour la génération d'alarmes
brutes.
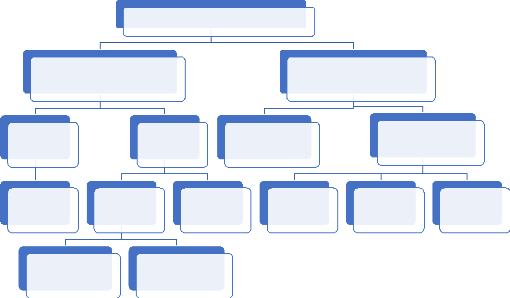
Méthodes par
modélisation
fonctionnelle
-Arbre de défaillance
-AMDEC
Redondance matérielle
Méthode à base de modèle
Redondance
analytique et
matérielle
Méthode par
modélisation
physique
approche analyse structurelle
Méthode de surveillance
Estimation Paramétrique
Outils statistiques
et traitement du
signal
Par modèle explicatifs
Méthode à partir des données historiques
Par
reconnaissan ce de forme
Intelligence artificielle
Par modèles
comportemen
taux
8
Figure 2 : Classification des méthodes de
surveillance [6]
Ø Méthodes de surveillance avec
modèle
Cette catégorie de méthodes à base de
modèle, fait appel à des techniques d'automatique,
et elle intervient directement sur les signaux provenant de la
chaîne de mesure, elle est la catégorie la plus utilisée
dans l'industrie, elle se compose de deux sous catégories de
méthodes :
· Méthodes de diagnostic par
modélisation fonctionnelle et matérielle
Ce type de méthode consiste à concevoir des
relations entre les effets mesurables des défaillances et leurs causes
initiales, tel que, à partir des effets d'une défaillance on
pourra remonter jusqu'à sa cause initiale, les méthodes les plus
couramment rencontrées sont l'Analyse des Modes de Défaillance,
de leurs Effets et de leurs Criticité (AMDEC) et les Arbres De
Défaillances (ADD). Une autre catégorie de méthodes avec
modèle est représentée par les méthodes
basées sur une modélisation physique des processus
surveillés.
· Méthodes de surveillance par
modélisation physique
Le principe de ces méthodes est de comparer les mesures
effectuées sur le système aux informations fournies par le
modèle analytique. Tout écart est alors synonyme d'une
défaillance, une fois un écart est détecté, les
outils de la théorie de la décision sont utilisés
9
pour déterminer si cet écart est dû
à des aléas normaux, comme par exemple le bruit de mesure ou s'il
traduit une défaillance du système, ces méthodes peuvent
être séparées en deux techniques : techniques de redondance
physique et analytique, et la technique d'estimation paramétrique.
Ø Méthodes de surveillance sans
modèle
En pratique, la majorité des systèmes sont non
linéaires et très complexes, ce qui rend la modélisation
une chose ardue voire impossible, alors pour ce type de systèmes, la
supervision avec les méthodes vues précédemment
c'est-à-dire les méthodes avec modèle est une chose
impossible, les méthodes qui sont applicables pour ce genre de
systèmes sont les méthodes sans modèle, appelées
aussi méthodes à base de données historiques.
Deux solutions existent dans ce cas : surveillance avec des
tests statistiques du traitement de signal et surveillance par intelligence
artificielle.
· Surveillance par outils statistiques du
traitement du signal
Cette technique de surveillance par outils statistiques de
traitement de signal suppose que les signaux provenant de la chaîne de
mesure possèdent certaines propriétés statistiques, ces
propriétés sont identifiées par des tests et
comparées avec les propriétés d'un échantillon de
signaux de mesures prélevés en mode de fonctionnement normal.
Une grande variété de tests, applicables sur un
échantillon de mesures. Parmi les plus importants, nous mentionnons : le
test de franchissement de seuils, le test de moyenne et le test de variance.
· Surveillance par intelligence
artificielle
Ces méthodes se basent sur les techniques de
l'Intelligence Artificielle (IA), En effet, l'Intelligence Artificielle permet
de contourner les obstacles rencontrés par les méthodes
classiques et d'une manière générale, l'Intelligence
Artificielle, est relativement bien adaptée aux problèmes de
surveillance, telle que, elle est capable de traiter : une grande
quantité d'informations, des données non homogènes
(numériques/symboliques) et aussi des données
incomplètes.
Ces méthodes à base de l'intelligence
artificielle se divisent en trois groupes : les méthodes à base
de modèles comportementaux, les méthodes de reconnaissance de
formes et les méthodes à base de modèles explicatifs.
I.5 PRINCIPES DU MONITORING
La surveillance et le pilotage à distance des
installations ou sites industriels éloignés et se base sur
plusieurs principes fondamentaux :
· Acquisition des données :
grande puissance de calcul, cartes d'entrées/sorties analogiques,
entrées TOR, sorties TOR...
· Traitement des données :
toutes les données sont historisées et archivées dans un
journal. Les données sont horodatées et encryptées pour
plus de sécurité.
· Transmission des données :
serveur web embarqué, réseau de communication radio, wifi.
· Consultation et pilotage à distance
: vous avez accès en temps réel à la gestion des
alarmes, aux journaux d'évènements, aux statuts des
entrées/sorties, aux commandes... vous pilotez vos équipements
où que vous soyez.
· Sécurisation des installations
: solution hautement sécurisée avec les protocoles SSL,
cryptage des données, traçabilité.
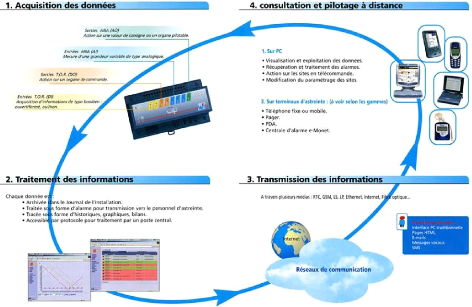
Figure 3: Principe du monitoring [7]
10
11
II.2.1 Acquisition des données
L'acquisition de données consiste à enregistrer
des signaux physiques sur un support numérique. Dans la grande
majorité des cas, l'acquisition de données se ramène
à enregistrer une tension. En effet, pour mesurer un courant, on mesure
la chute de potentiel aux bornes d'une résistance de valeur connue. Pour
mesurer une température, on mesure soit la chute de potentiel aux bornes
d'une résistance de platine (dont la variation en fonction de la
température est tabulée), soit la tension aux bornes d'un
thermocouple. La seule exception notable est l'utilisation de l'effet
piézo-électrique, qui nécessite de mesurer une charge.
Dans tous les autres cas, on doit enregistrer une tension. Il faut alors
effectuer une calibration pour remonter à la valeur originelle qu'on
souhaitait mesurer (courant, température, ...). Dans notre cas, le GE
possède une carte d'acquisition qui convertie une tension analogique en
un signal digital.
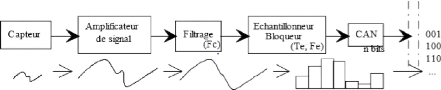
Figure 4: Structure de l'acquisition numérique
[8]
Les grandeurs physiques que nous visualiseront sont : La
température, la vitesse de rotation, la pression, la tension et le
niveau de carburant.
II.2.2 Traitement des informations
Une fois l'information acquise, elle sera traitée
suivant sa plage de fonctionnement normale puis archivée. Le poste local
de télégestion est en charge de traitement. Dans notre
étude, l'APM 403 est le module de commande du groupe qui va s'atteler
à cette tâche. À l'issue donc de cette opération,
les données sont :
- Archivée dans le journal de l'installation.
- Sous forme d'alarme (lorsque la valeur de la donnée
est hors de sa plage de fonctionnement).
- Sous forme d'historiques, graphique, statistiques.
- Accessible par un protocole de communication.
12
II.2.3 Transmission de informations
Après traitement de l'information, elle doit tout
naturellement être mise à disposition. La transmission de
l'information peut se faire :
- Avec un support matériel : (câble
électrique, pistes de circuit imprimé, câble
téléphonique, fibre optique, ...)
- En mode aérien par ondes
électromagnétiques (Wi-Fi, Bluetooth, radiofréquence,
infrarouge, GSM) en utilisant des interfaces de commande adaptées.
II.2.4 Consultation et pilotage à distance
Il existe plusieurs terminaux pour la consultation et le
pilotage à distance des équipements. Ces derniers permettent la
visualisation et l 'exploitation des données, la
récupération et traitement des alarmes, la modification du
paramétrage sur site, les actions sur les équipements en
télécommandant. Comme terminal, nous avons :
- L'ordinateur Portable
- Le téléphone fixe ou mobile
- La tablette
I.6 LES AVANTAGES DU MONITORING
Continuité et qualité de
service
· Accès à distance aux informations.
· Connaissance instantanée de tout incident et toute
dégradation.
· Alarmes préventives et automatismes de
réaction.
· Possibilité d'appels d'astreinte à travers
divers médias.
· Certification de process. Aide à la
maintenance
· Meilleure connaissance des installations et des
usages.
· Maintenance préventive pour conserver le
rendement maximal de fonctionnement (court terme) et prolonger la durée
de vie des équipements (long terme).
Economies d'exploitation
· Mise en oeuvre facile.
· Réduction des déplacements d'astreinte et
des visites systématiques.
· Economies d'énergie, de fluides et de
matières premières.
· Ajustement des dépenses énergétiques
aux besoins, tarifications et comportements des installations.
13
Aide aux décisions de gestion et
d'investissement
· Mise à disposition de journaux, historiques et
bilans des informations.
· Simulation de variantes.
· Comparaison des performances des différents sites
télégérés.
Après avoir définit le concept de monitoring,
nous avons tour à tour présenté l'historique, les
différents types de monitoring, les méthodes de surveillance, les
principes et enfin les avantages. Ceci nous a permis de mieux cerner ce
concept. Dans notre travail, il est question de monitorer des groupes
électrogènes. Ainsi donc dans la suite, nous présentons
une généralité sur les groupes électrogènes
afin de mieux connaitre le système sur lequel nous travaillons.
II. GENERALITES SUR LES GROUPES ELECTROGENES
Dans les secteurs d'activités sensibles tels que les
hôpitaux, les industries agro-alimentaires, les services publiques ; les
activités ne doivent en aucun cas être interrompus faute
d'électricité. Il est donc indispensable d'avoir un groupe
électrogène industriel pour se prémunir des coupures
d'électricité.
II.1 DEFINITION
Le groupe électrogène est un
assemblage d'un moteur et d'un système dynamoélectrique
permettant de transformer l'énergie mécanique du moteur en
énergie électrique. De façon simple, il est un dispositif
autonome capable de produire de l'électricité. Aussi
appelé générateur électrique de
courant, Il est utilisé dans toutes les activités
où une alimentation électrique est nécessaire lorsque le
réseau public n'est pas disponible ou en cas de coupure de courant.
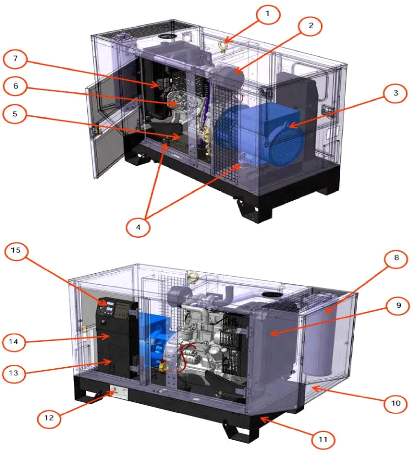
II.2 PRESENTATION D'UN GROUPE ELECTROGENE
La figure suivante nous présente un groupe
électrogène avec ses différentes parties.
14
Figure 5: Description générale d'un groupe
électrogène avec capot de protection SDMO 550
KVA [9]
Tableau 1 : Légende
1
|
Anneau de levage
|
6
|
Moteur
|
11
|
Châssis
|
2
|
Filtre à air
|
7
|
Grilles de protection parties tournantes
|
12
|
Plaque d'identification
|
3
|
Alternateur
|
8
|
Echappement
|
13
|
Disjoncteur
|
4
|
Plots amortisseurs
|
9
|
Radiateur
|
14
|
Pupitre de commande
|
5
|
Batterie de
démarrage
|
10
|
Capot de protection
|
15
|
Coffret de commande
|
|
15
II.3 PRINCIPE DE FONCTIONNEMENT
Un groupe électrogène est essentiellement
composé de deux parties principales : le moteur et l'alternateur. Le
moteur est responsable de la production de l'énergie mécanique
nécessaire pour faire tourner l'alternateur, qui convertit ensuite cette
énergie mécanique en électricité. Pour fonctionner,
le moteur a besoin d'être approvisionné en carburant. L'essence,
le gazole, un biocarburant ou du GPL peut être utilisé suivant le
type de groupe.
L'accouplement entre le moteur et l'alternateur est
directement effectué sur l'axe du moteur. La génératrice
recoit donc de son arbre un mouvement rotatif qui produit un champ
magnétique ensuite transformée en énergie
électrique pour enclencher le groupe électrogène.
Grâce à un régulateur de tension, le courant produit est
maintenu à une tension constante pour une utilisation efficace.
Figure 6: Principe de fonctionnement du groupe
électrogène
II.2.1 Le moteur
Le moteur est le coeur du groupe électrogène.
Il est conçu pour convertir l'énergie chimique contenue dans le
carburant en énergie mécanique. Les moteurs modernes sont
dotés de technologies avancées telles que l'injection
électronique, les turbocompresseurs et les systèmes de
refroidissement efficaces, ce qui leur confère une grande
fiabilité et une efficacité énergétique optimale.
[10]
16
Le type de groupes électrogènes peut influer sur
le moteur. En effet, certaines offres des systèmes très robustes
qui vont durer très longtemps. Les groupes électrogènes
diesel ont un moteur qui consomme moins que les groupes
électrogènes essences.
II.2.2 L'alternateur
L'alternateur est responsable de la conversion de
l'énergie mécanique en énergie électrique. Il
génère un courant alternatif grâce à l'induction
électromagnétique. Les alternateurs de haute qualité
utilisent des aimants permanents ou des excitateurs pour assurer une tension
stable et une onde sinusoïdale propre, ce qui est essentiel pour produire
l'énergie électrique qui alimente en toute sécurité
les appareils sensibles.
II.2.3 Système de régulation
Pour garantir une tension de sortie constante, les groupes
électrogènes sont équipés de systèmes de
régulation sophistiqués. Ces dispositifs surveillent en
permanence la charge et ajustent automatiquement la vitesse du moteur pour
maintenir une fréquence et une tension constantes, indépendamment
des variations de la charge électrique.
II.2.4 Système de refroidissement
Le groupe électrogène consomme du carburant et
produit de l'énergie. Les groupes électrogènes actuels ont
un rendement souvent bien inférieur à 50% par rapport à la
valeur calorifique du carburant. C'est-à-dire que lors de sa combustion,
la moitié du carburant est convertie en énergie électrique
tandis que l'autre est convertie en chaleur qui arrive jusqu'à l'ordre
de 2000°C. Lors de sa transformation, le carburant réchauffe le
groupe et l'augmentation de température qui en résulte peut
entrainer : Une surconsommation de carburant par le groupe, Une baisse de son
rendement, La destruction du moteur si l'échauffement est excessif.
Ainsi, l'installation d'un système de refroidissement pour le groupe
électrogène est nécessaire, afin d'éviter
l'échauffement du système. Le système de refroidissement
comprend : le radiateur, la pompe qui entraine le liquide de refroidissement,
le vase d'expansion, le thermostat, le ventilateur, le liquide de
refroidissement (eau + additif).
II.4 TYPOLOGIE DES GROUPES ELECTROGENES Suivant le type de
carburant utilisé ; nous distinguons :
· Groupe électrogène Diesel
: Idéales pour les puissances supérieures à 5 kW
et pour un usage intensif. Ils sont souvent utilisés dans les ateliers,
les sites éloignés, etc.
·
17
Groupes électrogènes à Essence
: Ce sont des appareils économiques, adaptés à un
usage plus sporadique que le diesel. Idéal pour une puissance
limitée et une utilisation occasionnelle.
· Groupes électrogènes à
Nafta : Encore plus économiques que les
générateurs à essence, ils sont utilisés pour des
puissances inférieures à 2 kW, bien qu'ils puissent être
utilisés occasionnellement pour des puissances supérieures. Ils
constituent une solution très pragmatique pour les petits
établissements.
· Groupes électrogènes à
Gaz : Leur champ d'utilisation est similaire à celui des
générateurs à essence. L'avantage des groupes
électrogènes à gaz est leur haut rendement et leur faible
impact sur l'environnement. Ils sont économiques et fiables.
Selon la tension, nous distinguons les groupes
électrogènes :
· Monophasé : la majorité
des groupes électrogènes de faible puissance (jusqu'à 5
kW) fournissent du courant alternatif à une tension de 220V.
· Triphasé : les
générateurs de puissance supérieure, en revanche,
intègrent généralement des prises de courant alternatif de
400V.
Selon le type d'usage nous avons :
§ Le groupe électrogène d'appoint
qui est utilisé en nomade. Il est un groupe compact pouvant
être déplacé facilement dans ses différents usages.
Ce groupe électrogène est portatif (groupe
électrogène camping-car, groupe électrogène de
maison à usage multiple, groupe électrogène de
chantier).
§ Le groupe électrogène fixe
installer en secours de panne secteur dans des domaines sensibles
(hôpitaux, stations militaires et opérationnelles) ou en
relève des centrales électriques en période de pic de
consommations (groupe EJP) pour la maison ou l'industrie (groupe
électrogène de maison (secours domestique), groupe
électrogène fixe industriel).
II.5 CARACTERISTIQUES DU GROUPE ELECTROGENE Les principales
caractéristiques du groupe électrogène sont :
Tableau 2: Les caractéristiques des groupes
électrogènes
|
Caractéristique
|
Unités
|
Caractéristique
|
Unités
|
|
Puissance active P=U x I x Cos (Phi)
|
kWatts
|
Facteur de puissance
|
-
|
|
Puissance réactive Q=U x I x Sin (Phi)
|
kVAR
|
Nombre de phase
|
-
|
|
Puissance apparente S=U x I
|
VA
|
Fréquence
|
Hz
|
|
Tension U
|
V
|
|
|
|
Intensité du courant I
|
A
|
|
|
|
Vitesse de rotation
|
Rpm
|
|
|
18
A présent que nous avons fait le tour de ce qui a
à savoir sur les groupes électrogènes, nous allons nous
intéresser au volet communication. Dans le paramétrage de notre
groupe, nous avons constaté que la communication avec ce groupe
s'effectue via le protocole Modbus qui permet de relier un maitre
(téléphone dans notre cas) à plusieurs exclaves (les
différents groupe électrogènes). Ainsi donc nous par la
suite, nous présentons une généralité sur le
Modbus.
III. GENERALITES SUR LE MODBUS
III.1 DEFINITION
En 1979, le protocole de communication série MODBUS a
été développé par Modicon pour être
utilisé avec ses contrôleurs logiques programmables (PLC). En
termes simples, il s'agit d'une méthode utilisée pour transmettre
des informations sur des lignes en série entre des appareils
électroniques. L'appareil qui demande l'information s'appelle le MODBUS
Master et les périphériques fournissant des informations sont
MODBUS Slaves. Dans un réseau MODBUS standard, il existe un Master et
jusqu'à 247 Slaves, chacun avec une adresse esclave unique de 1 à
247. Le Master peut également écrire des informations sur les
Slaves.[10]
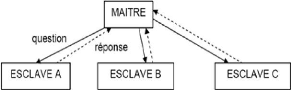
Figure 7: Structure du protocole MODBUS [11]
· Le maître envoie une demande et attend une
réponse.
· Deux esclaves ne peuvent dialoguer ensemble.
· Le dialogue maître - esclave peut être
schématisé sous une forme successive de liaisons point à
point.
· Mode de communication : half-duplex (2 fils ou 4
fils).
· Le maître parle à l'ensemble des
esclaves, sans attente de réponse (diffusion générale).
Il ne peut y avoir sur la ligne qu'un seul équipement
en train d'émettre. Aucun esclave ne peut envoyer un message sans une
demande préalable du maître. Le dialogue direct entre les esclaves
est impossible.
19
III.2 STRUCTURE DES MESSAGES DANS LE MODBUS Le
maître envoie un message constitué de la façon suivante
:
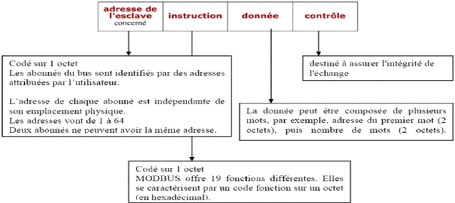
Figure 8: Structure d'un message dans le protocole MODBUS
[11] III.3 LES FONCTIONS MODBUS
Les fonctions offertes par le protocole MODBUS sont les
suivantes : Tableau 3: fonctions Modbus
Fonction
|
Signification
|
1
|
Lire l'état d'une bobine
|
2
|
Lire l'état d'une entrée
|
3
|
Lire les registres de maintien
|
4
|
Lire les registres d'entrée
|
5
|
Ecrire dans une bobine
|
6
|
Ecrire dans un registre de maintien
|
15
|
Ecrire dans plusieurs bobines
|
16
|
Ecrire dans plusieurs registres de maintien
|
17
|
Renvoyer l'ID de l'esclave (série uniquement)
|
43 (sous code 14)
|
Lire l'identification de l'appareil
|
100
|
Lire des registres de maintien éclatés.
|
|
20
III.4 MODE DE FONCTIONNEMENT DU MODBUS
III.4.1 En mode RTU (RS232, RS422, RS485)
Il est utilisé dans la communication série et
utilise une représentation binaire compacte des données pour la
communication par protocole. Le format RTU suit les commandes/données
avec une somme de contrôle de redondance cyclique comme mécanisme
de contrôle d'erreur pour garantir la fiabilité des
données. Modbus RTU est l'implémentation la plus courante
disponible pour Modbus. Un message Modbus RTU doit être transmis en
continu sans hésitation entre les caractères. Les messages Modbus
sont encadrés (séparés) par des périodes
d'inactivité (silencieuses).
Il fonctionne sur le mode Maître/Esclave. Seul le
maître est actif, les esclaves sont complètement passifs. C'est le
maître qui doit lire et écrire dans chaque esclave. Il est
constitué de trames contenant le numéro de l'esclave
concerné, la fonction à traiter (écriture, lecture), la
donnée et le code de vérification d'erreur appelé
contrôle de redondance cyclique sur 16 bits ou CRC16.

Figure 9: Format d'une trame en mode RTU [11]
III.4.2 En mode TCP (Ethernet)
Il s'agit d'une variante Modbus utilisée pour les
communications sur les réseaux TCP / IP. Il fonctionne sur le mode
Client / Serveur. Les clients sont tous actifs, le serveur est
complètement passif. Chaque client lit et écrit dans le serveur,
il est constitué de trames contenant la fonction à traiter
(écriture, lecture) et la donnée, l'adresse du serveur
concerné est son adresse IP. Le code de vérification d'erreur est
inutile en mode TCP, ce mode de transmission comporte déjà un CRC
appelé contrôle de redondance cyclique sur 32 bits
géré par la carte réseau.
Nous retenons de cette partie que le Modbus est un protocole
de communication qui permet la communication entre un maitre et plusieurs
exclaves. Elle fonctionne soit en mode RTU soit en mode Ethernet. De plus, en
ce qui concerne le volet communication, nous serons amenés à
concevoir une application mobile qui va jouer le rôle de maitre dans la
communication
21
à distance. Ainsi donc la suite de notre document
présente les généralités sur les applications
mobiles.

Figure 10: Format d'une trame en mode TCP [11]
IV. GENERALITES SUR LES APPLICATIONS MOBILES
IV.1 DEFINITION
Une application mobile est un logiciel applicatif
développé pour un appareil électronique mobile, tel qu'un
assistant personnel, un téléphone portable, un smartphone, un
baladeur numérique, une tablette tactile, ou encore certains ordinateurs
fonctionnant avec le système d'exploitation Windows Phone ou Chrome Os.
Elle peut être soit installée directement sur l'appareil
dès sa fabrication en usine, soit téléchargée
depuis un magasin d'applications dit « application store » telle que
: Google Play (Plateforme Google/Android), App Store (Plateforme d'Apple),
Windows Phone Store (Plateforme de Microsoft). [12]
IV.2 HISTORIQUE SUR LES APPLICATIONS MOBILES
Le tableau suivant nous fait un bref résumé de
l'historique des applications mobiles. Tableau 4: Historique des applications
mobiles [12]
1990
|
Norme GSM 2G
|
1992
|
1er smartphone : IBM Simon
|
1999
|
Nokia 3210, Blackberry OS (C++)
|
2002
|
BlackBerry 5810
|
2006
|
Norme GSM 3G
|
2007
|
iPhone 1, lancement d'iOS (XNU)
|
2007
|
Lancement d'Android (Linux)
|
2008
|
App store et Android Market
|
2009
|
Smartphone Samsung Galaxy i7500
|
2010
|
Norme GSM 4G, Windows Phone (C++/C#)
|
2012
|
Google Play : Android Market + Google Movies + Google
Music
|
|
22
IV.3 DIFFERENTS TYPES D'APPLICATION MOBILE
On en distingue trois familles d'applications mobiles : les
applications natives, les applications web et
les applications hybrides.
L'application native : est une application
mobile spécifiquement conçu pour un seul système
d'exploitation mobile. Elle est conçue avec le langage et les outils
associés à son système d'exploitation, et installée
directement sur le mobile. L'installation se fait par :
- Téléchargement
- Déploiement depuis un ordinateur connecté au
mobile.
L'application Web : Ce type d'application
correspond à des sites web. Ils sont mis en place pour proposer un
affichage entièrement optimisé pour les téléphones
mobiles. Contrairement aux applications natives, qui nécessitent un
téléchargement préalable, les applications Web sont
accessibles depuis un navigateur pour mobile.
L'application hybride : elle est accessible
depuis toutes les plateformes mobiles. Par ailleurs, elle se
présente comme un mix entre les Natives Apps et les Web Apps.
Contrairement aux applications natives elles ne sont pas dépendantes
d'une plateforme particulière. D'autre part, contrairement aux
applications Web, elles ont la possibilité d'accéder à
toutes les fonctions qui sont présentes sur un téléphone
mobile.
IV.4 LES CARACTERISTIQUES D'UNE APPLICATION
MOBILE
La qualité d'une application peut parfois être
très subjective. Néanmoins selon RECURSYVE, elle repose sur les
caractéristiques suivantes :
Rapidité : une application interne
développée pour une entreprise permet l'optimisation
d'un processus et donc le temps des employés, temps qui
pourra ensuite être utilisé pour
des tâches créant beaucoup plus de valeur au sein de
l'organisation.
Sécurité : l'attention
portée à la sécurité n'est plus un luxe, c'est une
obligation. Il n'a
jamais été aussi important de se conformer aux
normes de sécurité logicielles en vigueur et
de tenir à jour les technologies utilisées dans
nos applications.
Stabilité
Flexibilité
Design moderne
Intuitive
Interopérable
23
A présent que nous avons fait le tour des
différents concepts employés dans le cadre de notre travail,
entrons de pleins pieds dans le vif du sujet en présentant le contexte
de travail et la problématique qui s'en dégage.
V. CONTEXTE ET PROBLEMATIQUE
Les groupes électrogènes jouent un rôle
important pour l'alimentation électrique des différents sites du
PAD en cas de coupure ou de disfonctionnement du secteur. L'arrêt brusque
des groupes électrogènes en cas de sollicitation, entraine un
arrêt des activités provoquant ainsi des lenteurs administratives,
l'insécurité des bateaux.
Au cours de l'année 2023, suite à une coupure
du secteur, les groupes électrogènes n'ont pas
démarré, plongeant ainsi dans l'obscurité l'immeuble
siège du PAD pendant plus d'une heure. Le sujet est donc très
vite devenu une préoccupation pour l'entreprise. Ainsi donc l'on
s'interroge sur comment faire pour ne plus subir les pannes des groupes
électrogènes ?
Jusqu'à présent, la solution adoptée par
l'entreprise consiste à effectuer des rondes hebdomadaires pour checker
les paramètres de fonctionnement des groupes électrogènes.
Cependant ; avec les coupures d'énergie qui sont de plus en plus
récurrentes, les rondes s'accentuent.
Conscient de la place importante qu'occupe les
générateurs pour le bon déroulement de ses
activités, aux vues des limites que présentent jusqu'ici les
solutions adoptées, et des dépenses qui s'élèvent
à environ 10 millions FCFA (maintenance corrective et achat des
pièces de rechange) pour les groupes de 550 KVA de l'immeuble
siège, le Département de gestion du Patrimoine du PAD nous a
confié le travail de : Monitoring des groupes électrogènes
de l'immeuble siège du PAD.
Les attentes de ce travail sont :
· Effectuer une télémétrie des
paramètres de fonctionnement des groupes électrogènes
(température du moteur ; tension de la batterie, pression d'huile du
moteur, puissances active, régime et niveau de carburant).
· Configuration des alertes
· Programme de maintenance préventive
· Générer les statistiques : nb de
démarrage ; nb d'arrêts d'urgence ; programme de maintenance, nb
d'heures de fonctionnement, nbre d'arrêt immédiat.
· Changer le mode de fonctionnement du groupe (MAN, AUTO
ou OFF)
·
24
Suivre la consommation de carburant et optimiser.
CONCLUSION
Dans ce chapitre, il était question de présenter
de manière générale le cadre de notre étude tout en
épiloguant sur les différents concepts autour de notre
thème. Pour cela, nous avons tour à tour présenter de
façon subtile les GE en insistant leur principe de fonctionnement ; nous
avons parlé du monitoring, du protocole de communication Modbus, et des
applications mobiles. Pour la suite, nous allons présenter le
matériel et la méthode utilisés pour la conception de
notre système de monitoring.
25

26
CHAPITRE II : MATERIEL ET METHODES
INTRODUCTION
Dans cette partie, nous allons présenter le
matériel utilisé ainsi que les méthodes nous ayant permis
de réaliser le monitoring des GE du PAD.
I. MATERIEL
Cette partie est essentiellement consacrée à la
description du matériel sur lequel a
porté notre étude. Il s'agit ici principalement
de la description des différents groupes électrogènes, des
ressources logicielles et matérielles utilisées pour mener
à bien notre travail.
I.1 GROUPES ÉLECTROGÈNES DE L'IMMEUBLE
SIÈGE DU PAD
Dans le souci d'assurer une alimentation électrique
ininterrompue, l'immeuble siège du PAD s'est doté de deux groupes
électrogènes de marque SDMO à savoir : IGH et SIMAR. La
figure ci-dessous nous présente ces groupes.

Figure 11. GE IGH Figure 12 . GE SIMAR
Ces deux GE possèdent des caractéristiques
similaires qui sont les suivantes : Tableau 5: Caractéristiques des
groupes électrogènes
|
CARACTERISTIQUES GENERALES
|
|
Puissance active
|
440 KW
|
Vitesse de rotation
|
1500 rpm
|
|
Puissance apparente
|
550 KVA
|
Puissance sonore
|
104 dB
|
|
Tension
|
400V
|
Facteur de puissance
|
0.8
|
|
Fréquence
|
50 Hz
|
Nombre de phase
|
3
|
|
Année
|
2018
|
|
|
|
N° série
|
18010180
|
|
|
Carburant
Afin d'avoir une vision globale et synthétique de nos
générateurs, nous utilisons par la suite la méthode
SADT.
Ø SADT DU GROUPE SIMAR La figure
suivante nous présente le SADT du GE SIMAR.
E R C W
Consignes utilisateur
Tension Fréquence
MAN AUTO
Energie chimique
Energie mécanique
Energie thermique
Produire l'énergie
électrique
Informations sur l'état
Carburant
Energie électrique
Bruit, fumée
Groupe électrogène
A-0
Figure 13: Actigramme A-0 du Groupe
électrogène
Energie électrique
Energie électrique Bouton Start/Stop
DC
|
24V
|
|
|
|
|
Convertir l'énergie
chimique en
énergie mécanique
|
|
|
|
|
|
|
|
|
A0
27
Figure 12 : Actigramme A0 du Groupe
électrogène
Ø
28
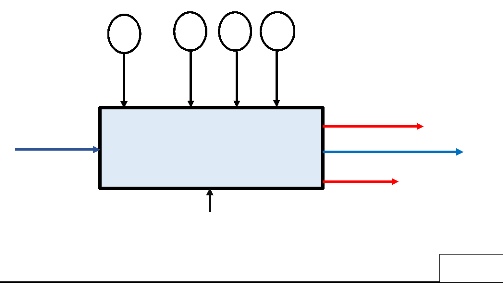
PRÉSENTATION DU COFFRET DE COMMANDE APM
403
Les APM403 (S et P) sont des contrôleurs pour
générateurs qui fonctionnent dans des applications autonomes
(standby, PRP, COP, etc.) ou plusieurs unités en parallèle. Ils
sont équipés d'un écran graphique qui affiche
icônes, symboles et barres pour une utilisation intuitive et conviviale
opérateur.
La figure suivante nous présente l'APM403 dont nos GE sont
équipés.
1-2 Sélectionner le mode de fonctionnement,
sélectionner un paramètre
3 Arrêter le klaxon
4 Reseter une anomalie
5-7 Changer d'écran de visualisation, choisir un
écran de réglage, sélectionner un paramètre
6 Accéder au menu général, revenir à
l'écran précédent
8 Accéder à l'écran de réglage
sélectionné, valider un réglage
9 Démarrer le GE (mode MAN)
10 Arrêter le GE (mode MAN)
11 Fermer/ouvrir le DJ motorisé (mode MAN)

13 LED état du GE
14 LED état physique du DJ
15 LED état de la charge (LED : diode
électroluminescente)
Figure 14: Présentation de l'APM 403 [14]
I.2 RESSOURCES MATERIELLES
Il s'agit dans cette partie de présenter tout le
matériel utilisé pour la réalisation du système
électronique de monitoring des GE.
§ Ordinateur Portable
Doté d'un disque dur de 500 Go (Technologie SSD),
d'une mémoire vive (RAM) de 16Go DDR4, d'une carte graphique NVIDIA
Gforce, 2Go GDDR5 de mémoire dédiée et d'un processeur
core i7, notre ordinateur de marque « DELL » a été une
pièce importante pour mener à bien notre travail. En plus de nous
permettre d'effectuer les recherches, il a servi par l'intermédiaire des
outils de développement, à la modélisation de
l'application.

29
Figure 15: Ordinateur portable DELL
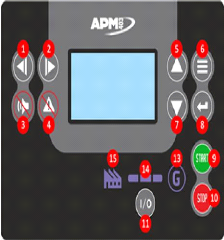
§ Microcontrôleur ESP32
La carte ESP32 est une carte de
développement électronique open-source basée sur un
microcontrôleur ESP32 de chez Espressif Systems. Elle
est particulièrement utilisée dans les projets de domotique et de
IoT (Internet des Objets) en raison de ses fonctionnalités de
connectivité sans fil (Wi-Fi et Bluetooth) et de sa grande puissance de
calcul. Les caractéristiques courantes de cette carte sont les suivantes
:
· Microcontrôleur ESP32 à
double coeur avec un processeur principal à 160 MHz et un coprocesseur
à 240 MHz ;
· Support de la connectivité Wi-Fi 802.11b/g/n et
Bluetooth v4.2 ;
· 32 Mo de mémoire flash et 520 Ko de
mémoire RAM ;
· 34 broches d'entrée/sortie, dont 18 PWM et 8
entrées analogiques ;
· Support de l'OTP (One-Time Programmable) pour la
mémoire flash et de la mémoire FRAM (Ferroelectric Random Access
Memory) ;
· Alimentation via USB ou 3,3 V externe.
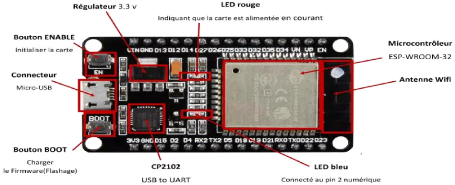
Figure 16: Présentation de l'ESP32
30
La carte ESP32 est compatible avec une grande
variété de langages de programmation, tels que C, C++ et Python.
Elle est également compatible avec de nombreux Framework de
développement comme Arduino.
§ Module MAX485 TTL to RS485 Converter
Le module MAX485 TTL vers RS485 convertit le signal TTL en
RS485 pour une communication différentielle à longue
portée et à débit de données élevé.
Ce convertisseur permet d'envoyer et de recevoir des données via le
réseau RS485 depuis un microcontrôleur (l'ESP32 dans notre cas)
.RS485 est un protocole standard de l'industrie pour le transfert de
données et offre de nombreux avantages. Il permet de transférer
des données entre 32 appareils maximum, via la même ligne de
données sur une longueur de câble allant jusqu'à 1,2 km (4
000 pieds) avec un débit de données maximum de 10 Mbit/s. les
caractéristiques de ce convertisseur sont les suivantes :
§ Puce MAX485 intégrée, faible
consommation d'énergie pour la communication RS-485,
émetteur-récepteur à débit lent.
§ Borne 2P à pas de 5,08 (mm)
intégrée pour faciliter le câblage de communication
RS-485.
§ Émetteur-récepteur limité
à débit lent.
§ Toutes les broches de la puce peuvent être
contrôlées via le microcontrôleur.
§ Câblage de communication RS-485 pratique.
§ Plusieurs unités peuvent être
connectées au même câblage de bus RS-485.
§ Toutes les broches de la puce sont sorties pour des
contrôles appropriés.
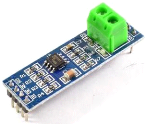
Figure 17: Module MAX485
§ Module GSM SIM800L
SIM800L est un module cellulaire miniature qui permet la
transmission GPRS, l'envoi et la réception de SMS ainsi que
l'émission et la réception d'appels vocaux. Son faible
coût, son
31
faible encombrement et sa prise en charge des
fréquences quadri bandes font de ce module la solution parfaite pour
tout projet nécessitant une connectivité longue portée :
raisons pour lesquelles nous l'avons adopté.
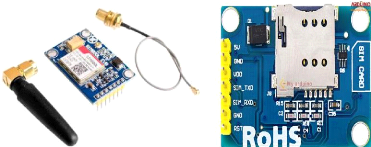
Figure 18: module GSM SIM800L
Les caractéristiques de ce dernier sont les suivantes :
· Tension d'alimentation : 3,8 V - 4,2 V
· Tension d'alimentation recommandée : 4 V
· Consommation d'énergie : - Mode veille < 2,0 mA
- Mode veille < 7,0 mA
· Transmission GSM (moyenne) : 350 mA
· Transmission GSM (coup d'oeil) : 2000 mA
· Taille des modules : 25 x 23 mm
· Interface : UART (max. 2,8 V) et commandes AT
· Prise pour carte SIM : micro SIM (côté
inférieur)
· Fréquences prises en charge : Quad Band
(850/950/1800/1900 MHz)
· Connecteur d'antenne : IPX
· Signalisation d'état : LED
· Plage de température de fonctionnement : -40 do +
85 °C
§ SIM Orange
Pour l'envoi des sms par la SIM800L, l'on doit y introduire une
puce de communication. Dans notre cas, nous avons opté pour une SIM
Orange car sa couverture de réseau est très large par rapport aux
autres opérateurs à travers le pays.

32
Figure 19: SIM Orange
§ Module radio NRF24L01
Le NRF24L01 est utilisé dans une grande
variété d'applications nécessitant un contrôle sans
fil. Ce sont des émetteurs-récepteurs, ce qui signifie que chaque
module peut transmettre et recevoir des données.

Figure 20: Module radio NRF24L01
Les caractéristiques sont les suivantes :
· Circuit intégré
d'émetteur-récepteur RF GFSK 2,4 GHz mono puce à faible
coût
· Portée avec antenne : débit de 250 Ko (zone
ouverte) > 1 000 mètres
· Alimentation : consommation d'énergie ultra
faible
· Tension d'entrée : 3,3 V
· Broches : tolérantes à 5 V
§ Câbles de connexion
Ces câbles nous permettent d'effectuer des liaisons
entre les différents composants. Nous avons utilisés les
câbles male-femelle, femelle-femelle et male-male.

Figure 21: fils de connexion
§ Imprimante 3D
L'imprimante 3D nous permet de créer des objets
physiques à partir des modèles numériques. Ainsi, par
fabrication additive, nous avons réalisé notre boitier de
protection par ajout de la matière en couche successives.
Les caractéristiques de l'imprimante à notre
disposition sont les suivantes :
Tableau 6. Caractéristiques de l'imprimante
3D
Nom
|
Spécifications
|
Software
|
Spécifications électriques
|
|
-Taille d'impression (X Y Z)
|
-Slicer Cura/Repetier-
|
-Besoin
|
Imprimante
|
|
|
|
|
220×220×300 mm
|
Host
|
alimentation
|
3D
|
|
|
|
|
-Vitesse 200 mm/sec
|
-Fichiers supportés
|
Input-AC
|
KINGROON
|
|
|
|
|
-Résolution 50 microns
|
STL, Gcode, OBJ
|
110V/220V
|
KP3S
|
|
|
|
|
-Hauteur de couche 0.05-
|
-OS
|
50/60Hz Output-
|
|
0.4mm
|
Windows/Mac/Linux
|
DC 24V
|
|
-Diamètre du filament 1.75
|
|
-Alimentation :
|
|
mm
|
|
250W max
|
|
-Diamètre de la buse 0.4 mm
|
|
|
|
-Filaments compatibles PLA, ABS, PETG, TPU, Carbon
|
|
|
|
Fiber, etc.
|
|
|
|
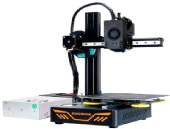
33
Figure 22. Imprimante 3D Kingroon
34
I.3 RESSOURCES LOGICIELLES
Il s'agit dans cette partie de présenter tous les
logiciels ayant permis la conception du système électronique et
la simulation. Nous avons utilisé 05 logiciels à savoir : Arduino
IDE, EasyEDA, App Inventor et SolidWorks.
§ Arduino IDE
L'environnement de développement intégré
(IDE) Arduino est une application multiplateforme (pour Windows, MacOs, Linux)
et libre dont les langages de programmation utilisés sont le C et le
C++. Il sert d'éditeur de code, de compilateur et permet de
téléverser les programmes vers les cartes Arduino ou ESP au
travers de la liaison série (RS-232, Bluetooth ou USB selon le
module).
Dans le cadre de notre projet, nous l'avons utilisé
pour écrire et téléverser du code vers notre ESP32.
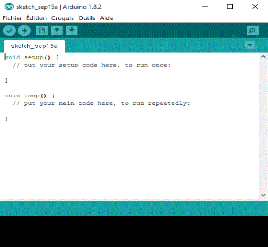
Figure 23: IDE Arduino
§ EasyEDA
EasyEDA est un outil de CAO pour l'électronique
(EDA= Electronic design automation) fonctionnant dans un navigateur
web, donc sans installation. Ce logiciel permet la conception, la simulation de
fonctionnement et la création du circuit imprimé (PCB). Sa
particularité réside dans la possibilité de commander
directement les pièces du circuit dans l'interface.
Nous avons utilisé ce logiciel pour concevoir notre
carte électronique, la simuler et la commander en ligne chez JLPCB pour
sa fabrication.
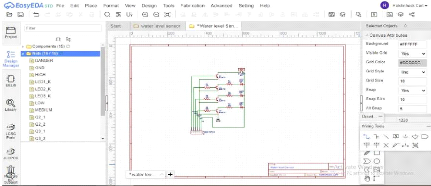
Figure 24: interface EasyEDA
§ App Inventor
App Inventor est un outil de développement en ligne
pour les téléphones et les tablettes qui fonctionnent avec le
système d'exploitation Android. Il faut donc une liaison internet et un
navigateur comme Mozilla Firefox ou Chrome pour s'en servir. La programmation
est réalisée sans taper une seule ligne de code, mais simplement
en associant et en paramétrant des briques logicielles toutes faites
(langage Scratch). Un émulateur ou son smartphone connecté permet
de visualiser les applications créées.
Ce logiciel nous a permis de concevoir notre application
mobile MyGENERATOR.
35
Figure 25: Interface APP INVENTOR
§
36
SolidWorks 2019
SolidWorks est un logiciel de conception assistée par
ordinateur capable de modéliser des objets en 3D. cette application de
conception mécanique permet aux concepteurs d'esquisser rapidement des
idées, d'expérimenter des fonctions et des côtes afin de
produire des modèles et des mises en plan précises.
SolidWorks dispose également de plusieurs outils de
visualisation et d'analyse d'impression 3D.
Dans le cadre de ce projet, nous utilisons le logiciel
SolidWorks pour concevoir et générer le fichier d'impression 3D
du boitier qui abrite notre carte électronique.
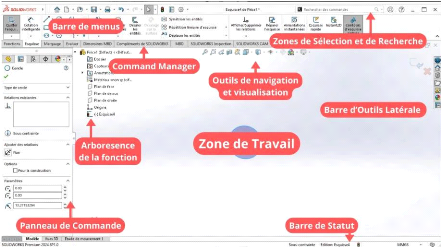
Figure 26: Interface SolidWorks
II. METHODES
Le système de surveillance à distance des
paramètres critiques des GE conçu dans ce travail est
constitué d'une partie matérielle et d'une partie logicielle.
Pour la conception de la partie matérielle, nous avons utilisé la
méthode APTE et pour la partie logicielle, nous avons utilisé la
méthode UML.
37
La figure suivante nous présente les étapes pour la
réalisation de notre produit.

Choix des
paramètres à
monitorer
(AMDEC)
Conception matérielle
(APTE)
Conception logicielle
(UML)
Réalisation et Analyse
Tests déploiement des coûts
II.1 CHOIX DES PARAMETRES A MONITORER
Le choix des paramètres à monitorer se fera par
la méthode AMDEC. L'Analyse des modes de défaillance, de leurs
effets et de leur criticité (AMDEC) est un outil de sûreté
de fonctionnement et de gestion de la qualité. Le but recherché
ici est la hiérarchisation des actions d'amélioration à
mener sur un processus, un produit ou un système en travaillant par
ordre de criticité décroissante.
La mise en oeuvre de cette méthode comporte :
· Une phase préliminaire : Elle
permet de définir les limites de l'étude et constituer les
groupes.
· Analyse des défaillances : Il
s'agit d'identifier les schémas du type :
- Le mode de défaillance : Il exprime de quelle
manière une fonction ne fait plus ce qu'elle est sensée faire,
L'analyse fonctionnelle recense les fonctions.
- La cause de la défaillance : C'est l'anomalie qui
conduit au mode de défaillance. Un mode de défaillance peut
résulter de la combinaison de plusieurs causes. Une cause peut
être à l'origine de plusieurs modes de défaillances.
- L'effet de la défaillance : L'effet concrétise
la conséquence du mode de défaillance. Un effet peut
lui-même devenir la cause d'un autre mode de défaillance.
· Calcul de la criticité :
L'évaluation de la criticité se fait selon 3 critères
principaux : la gravité, la fréquence, la
non-détection.
38
- La gravité (G) : Elle exprime l'importance de l'effet
sur la qualité du produit (AMDEC procédé) ou sur la
productivité (AMDEC machine) ou sur la sécurité (AMDEC
sécurité). Le groupe doit décider de la manière de
mesurer l'effet.
- La fréquence (F) : On estime la période
à laquelle la défaillance est susceptible de se reproduire.
- La non-détection(D) : Elle exprime
l'efficacité du système permettant de détecter le
problème.
- La criticité(C) : Lorsque les 3 critères ont
été évalués dans une ligne de la synthèse
AMDEC, on fait le produit des 3 notes obtenues pour calculer la
criticité.
Après avoir calculé la criticité en
fonction des modes de défaillance, nous allons monitorer les
sous-systèmes dont la criticité sera égale ou
supérieur à 12.
Le tableau suivant nous montre comment l'AMDEC doit
être disposé pour favoriser sa compréhension. Il nous donne
les critères des modes de défaillances utilisés pour
établir notre AMDEC :
Tableau 7: Illustration AMDEC [15]
Equipement s
|
Fonction s
|
Défaillance
|
Evaluation
|
Observation s
|
|
Effe t
|
Cause s
|
Mode de détectio n
|
F
|
D
|
G
|
C
|
|
|
|
|
|
|
|
|
|
|
|
|
|
39
II.2 CONCEPTION MATERIELLE
La conception de la partie matérielle se fera à
l'aide de la méthode APTE qui est méthode universelle d'analyse
fonctionnelle et d'analyse de la valeur pour la conduite de projets
d'optimisation et d'innovation. La figure ci-dessous représente le
schéma synoptique des étapes suivies :
OUTILS
· Diagramme Bête à cornes
· Diagramme
pieuvre
· Diagramme FAST
CONCEPTION
ÉTUDE DE LA FAISABILITÉ
ANALYSE DU BESOIN
ETAPES
RESULTAT
Besoin validé
Besoin exprimé (cahier de charge fonctionnel)
Dossier avant-projet
·
· Méthode WMS
ANALYSE
MULTICRITERE
EASYEDA
· SolidWorks
SIMULATION
ET
REALISATION
Choix des
composants
Validation du
produit et
amélioration.
Figure 27: Synoptique de la méthodologie
utilisée
40
II.2.1 ANALYSE FONCTIONNELLE
Nous avons utilisé ici la méthode APTE «
Application aux Techniques d'Entreprise » en abrégé APTE.
C'est une méthode universelle d'analyse fonctionnelle et d'analyse de la
valeur pour la conduite des projets. Du fait que cette méthode exprime
les besoins en termes de fonctions de service, elle permet au concepteur de
mieux cerner le problème à résoudre en analysant le besoin
à travers ses outils tels que le QQOQCP, l'outil bête à
cornes et le diagramme pieuvre. Par la suite il guide le concepteur, dans le
choix des solutions technologiques adaptées au cas d'étude pour
la mise sur pied du système.
La structure de l'analyse fonctionnelle est la suivante.
Figure 28: Structure de l'analyse fonctionnelle
[16]
Débutons par l'analyse fonctionnelle externe.
II.2.1.1 Analyse fonctionnelle externe
II.2.1.1.1 Analyse du Besoin
L'analyse du besoin se décompose et se structure en trois
phases telles que présentées à la figure
ci-dessous :
|
|
|
Figure 29: Phases de l'analyse du besoin [16]
|
|
L'objectif est de saisir, d'énoncer et de valider le
besoin (c'est-à-dire l'exigence fondamentale nécessitant la
création du produit).
a) Saisie du besoin
Afin de décrire avec clarté la
nécessité de la mise en place d'un système de surveillance
à distance des GE, nous avons utilisé la méthode
QQOQCP.
La méthode QQOQCP : Quoi, Qui, Où, Quand,
Pourquoi, est un outil adaptable à diverses problématiques
permettant la récolte d'informations précises et exhaustives
d'une situation et d'en mesurer le niveau de connaissance que l'on
possède. Le tableau suivant nous résume cette méthode.
Tableau 8: Méthode QQOQCP[16]
Lettre Question Question à se poser
Cibles
Q
|
Quoi ?
|
De quoi s'agit-il ? Que s'est-il
passé ?
Qu'observe-t-on ?
|
Objet, actions, procédés,
phase,
opération, machine
|
Q
|
Qui ?
|
Qui est concerné ? Qui a détecté
le
problème ?
|
Personnel, clients, fournisseur...
|
O
|
Où ?
|
Où cela s'est-il produit ? Où cela
se
passe-t-il ? Sur quel poste ?
Quelle machine ?
|
Lieux, atelier, poste, machines...
|
Q
|
Quand ?
|
Quel moment ? Combien de fois
par cycle ? Depuis quand ?
|
Depuis quand ?
Mois, jour, heure, durée,
fréquence,
planning, délais...
|
C
|
Comment ?
|
De quelle manière ? Dans quelles
circonstances ?
|
Moyens, fournitures, procédures, mode
opératoire...
|
P
|
Pourquoi ?
|
Dans quel but ? Quelle finalité ?
|
Action correctives, préventives,
former, atteindre
les objectifs...
|
|
41
En appliquant cette méthode à notre cas, nous
obtenons le tableau suivant.
42
Tableau 9: méthode QQOQCP
Questions
|
Réponses
|
De quoi s'agit-il ?
|
Il s'agit des problèmes de :
-Rondes excessives.
-Arrêts de groupes électrogènes dus au
manque de combustibles ; -Distance entre les différents locaux des
groupes.
|
Qui est concerné par le problème
?
|
Le service de maintenance des équipements techniques
du PAD et le prestataire en charge des groupes SOPRIM.
|
Où se produit ce
problème ?
|
Dans les sites et résidences du PAD.
|
A quelle fréquence le problème apparait
il ?
|
Le problème est de plus en plus fréquent
à cause de l'accroissement des coupures d'énergie au sein de la
ville.
|
Comment se
manifeste ce
problème ?
|
Après coupure d'énergie de la source
principale, le groupe électrogène (la source secondaire) prend le
relai puis au bout d'un certain temps s'arrête.
|
Pourquoi vouloir
résoudre ce
problème ? Quels
sont les raisons qui poussent
à résoudre ce problème ?
|
-Limiter les rondes des équipes de maintenance pour
contrôler les différents paramètres (température
moteur, pression d'huile, niveau de carburant...).
-Planifier et anticiper de manière plus optimale les
opérations de maintenance.
|
|
b) Enoncé du besoin
Par la suite, nous avons énoncé le besoin en
utilisant le diagramme bête à cornes. C'est un outil d'analyse
fonctionnelle qui définit le besoin auquel répond le produit en
trouvant la réponse au trois questions suivantes :
· À qui le produit rend-il service ?
· Sur quoi agit- il ?
· Dans quel but existe-t-il ?
Ce questionnement est représenté par la figure
suivante :
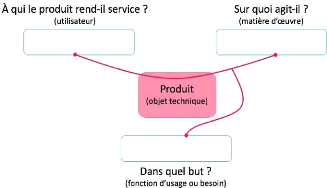
43
Figure 30: Diagramme Bête à cornes
[17]
Nous obtenons pour notre système de monitoring le
diagramme suivant.
Groupe
Utilisateu
électrogène
Système de Monitoring
Visualiser les paramètres de
fonctionnement en temps
réel et le
Figure 31: diagramme bête à cornes
appliqué au système
Il ressort donc que le système de monitoring à
mettre en place permet à l'utilisateur de visualiser les
paramètres de fonctionnement des GE en temps réel et de le
commander à distance.
c) Validation du besoin
Après avoir déterminé le besoin
satisfait par le produit, il faut vérifier sa stabilité. Pour
cela, il est nécessaire de rechercher si ce besoin risque de
disparaître ou d'évoluer dans un délai plus ou moins long.
En effet il est inutile et dangereux de poursuivre la réflexion si le
produit risque d'être obsolète dans un avenir proche.
Ce contrôle de validation consiste à se poser les
questions suivantes :
·
44
Pourquoi ce besoin existe-t-il ?
· Qu'est-ce qui pourrait le faire disparaître ? le
faire évoluer ?
· Quel est le risque de le voir disparaître ? le voir
évoluer ?
Le tableau suivant nous présente cette validation.
Tableau 10: Validation du besoin
Questions
|
Réponses
|
Pourquoi ce besoin
existe-t-il ?
|
Visualiser les paramètres de fonctionnement des GE en
temps réel et les commander à distance.
|
Qu'est ce qui pourrait le
faire disparaître ?
|
· Disparition des téléphones
· Le développement de nouvelles plates formes
mobiles
· Installation d'une nouvelle technologie d'alimentation en
énergie électrique de secours (solaire ; éolienne...)
|
Qu'est ce qui pourrait le
faire évoluer ?
|
· Exigence de la qualité
· Sollicitation plus accrue des GE due à
l'augmentation de la fréquence de coupure du courant.
|
Quel est le risque de le
voir disparaître ?
|
Très bas
|
Quel est le risque de le
voir évoluer ?
|
Élevé
|
|
II.2.1.1.2 Etude de la Faisabilité
Il s'agit ici de l'expression fonctionnelle du besoin ;
l'objectif est d'établir le cahier de charge fonctionnel (CdCF). Cette
étude comporte 4 phases à savoir :
· Identification des fonctions de service ;
· Caractérisation des fonctions de services ;
· Hiérarchisation des fonctions de service ;
· Rédaction du cahier de charges fonctionnel. La
décomposition de cette étude est présentée comme
suit :
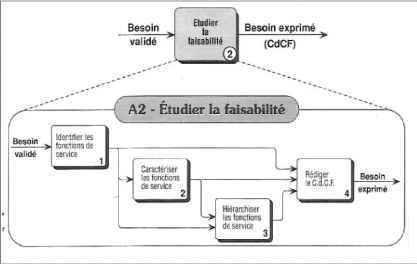
45
Figure 32: Phases de l'étude de la faisabilité
[18] a) Identification des fonctions de service
Le diagramme pieuvre est issue de la méthode APTE
(Application des Techniques d'Entreprise). Cet outil permet d'identifier les
fonctions d'un système ou d'un produit et de rechercher les fonctions
attendues.
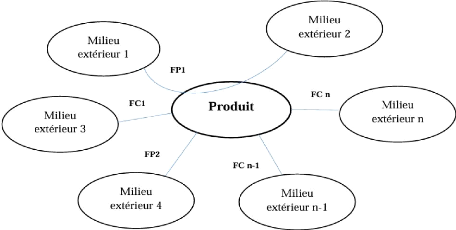
Figure 33: Diagramme Pieuvre [19]
46
En appliquant le diagramme pieuvre à notre produit, nous
obtenons la figure suivante.
GE
Utilisateur
FP3
FC6
Alimentation
FP1 FC1
F
FP2
Système de
Monitoring du
GE
FC5
Milieux ambiants
Téléphone
FC4
FC3
Maintenance
Encombrement
Figure 34: Résultat du diagramme pieuvre Les
fonctions de services sont :
Fonctions principales :
· FP1 : Récupérer les informations du GE.
· FP2 : Traiter les informations
récupérées du GE.
· FP3 : Mettre les informations du GE à la
disposition de l'utilisateur en temps réel.
Fonctions contraintes :
· FC1 : Être alimenté à partir de la
batterie (alimentation autonome) ;
· F : Communiquer avec le téléphone (se
connecter à lui et lui envoyer les données) ;
· FC3 : Être peu encombrant ;
· FC4 : Nécessiter une maintenance réduite,
aisée et une installation simple ;
· FC5 : Résister au milieu ambiant ;
· FC6 : Garantir la sécurité de
l'utilisateur.
47
b) Caractérisations des fonctions de
services
Les fonctions de service ayant déjà
été identifiées, cette phase aura pour objectifs de :
· Énoncer les critères d'appréciation
de chaque fonction de service ;
· Définir le niveau de chaque critère ;
· Assortir chaque critère d'une
flexibilité.
Le tableau ci-dessous nous présente les
caractéristiques de chaque fonction de service. Tableau 11 :
Caractérisation des fonctions de service du dispositif de
monitoring
N°
|
FONCTIONS
|
CRITERES
|
NIVEAU
|
1
|
FP1 : Récupérer les informations du GE.
|
Liaison
|
Filaire
|
2
|
FP2 : Traiter les informations récupérées
du GE.
|
Capacité de stockage
|
Ko
|
|
Mb/s
|
|
Mhz
|
3
|
FP3 : Mettre les informations du GE à la disposition
de l'utilisateur en temps réel.
|
Temps de réponse
|
De 1ms à 1s
|
4
|
FC1 : Être alimenter à partir de la batterie
|
Type énergie
|
Électricité continue (DC)
|
|
9 Volts
|
5
|
F : Communiquer avec le téléphone
|
Vitesse de
communication
|
9600 s
|
6
|
FC3 : Être peu encombrant
|
Espace
|
mm3
|
7
|
FC5 : Résister au milieu ambiant
|
Étanchéité
|
Très bonne
|
|
-20°C à 70°C
|
|
c) Rédaction du cahier de charges
fonctionnels
C'est un document par lequel le demandeur exprime son besoin en
termes de fonctions de
service. Pour chacune d'elle, sont définis les
critères d'appréciation et leur niveau ; chacun de ces niveaux
est assorti d'une flexibilité (tolérance).
Le CdCF n'exprime que des exigences de résultats et en
principe aucune exigence des
moyens. Il permet de spécifier le besoin, favoriser
l'innovation, restaurer la concurrence, clarifier les relations, augmenter la
compétitivité du produit.
48
Le tableau qui suit nous présente le cahier des charges
fonctionnelles techniques. Tableau 12: Cahier des charges fonctionnelles
techniques
N°
|
FONCTIONS
|
CRITERES
|
NIVEAU
|
Flexibilité
|
1
|
FP1 : Récupérer les informations du GE.
|
Type de Liaison
|
Filaire
|
F0
|
|
USB, RS485
|
F2
|
2
|
FP2 : Traiter les informations récupérées
du GE.
|
Capacité de stockage
|
Ko
|
F1
|
|
Mb/s
|
F0
|
|
Mhz
|
F0
|
3
|
FP3 : Mettre les informations du GE à la disposition de
l'utilisateur en temps réel.
|
Temps de réponse
|
De 1ms à 1s
|
F0
|
4
|
FC1 : Être alimenter à partir de la batterie
|
Type énergie
|
Électricité continue
(DC)
|
F0
|
|
24 Volts
|
F0
|
5
|
F : Communiquer avec le téléphone
|
Vitesse de
communication
|
9600 s
|
F1
|
6
|
FC3 : Être peu encombrant
|
Espace
|
mm3
|
F0
|
7
|
FC5 : Résister au milieu ambiant
|
Étanchéité
|
Très bonne
|
F1
|
|
-20°C à 70°C
|
F1
|
|
· F0 flexibilité nulle
· F1 niveau peu négociable
· F2 niveau négociable
· F3 niveau très négociable
II.2.1.2 Analyse fonctionnelle interne
Elle permet d'analyser les modalités de
réalisation des fonctions identifiées par l'analyse
fonctionnelle externe. Elle conduit à la
détermination des fonctions techniques à mettre en oeuvre pour la
satisfaction du cahier des charges fonctionnelles de notre système.
49
II.2.1.2.1 Diagramme FAST
Le diagramme FAST (Function Analysis system technic) est une
traduction rigoureuse de chacune des fonctions de service sur le plan technique
puis de manière matérielle en solution constructive. En effet la
lecture ou encore la compréhension du diagramme FAST se fait en
répondant à la question « pourquoi ? » (De la droite
vers la gauche) et « comment ? » (De la gauche vers la droite).
Elaborons donc le diagramme FAST du système.
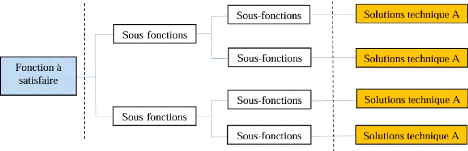
Figure 35: Diagramme FAST [20]
La figure suivante nous présente le résultat de
la méthode FAST qui nous permet de dégager tous les composants
nécessaires à la réalisation de notre système de
monitoring des GE.
Consultation et
pilotage à distance
Transmission des informations
Acquisition des
données du GE au
niveau du
pupitre
Traitement des informations
Alimentation
Envoie des
alertes par SMS
Microcontroleur
Convertisseur
Transmission des
informations à distance
Consultation
Pupitre de commande
APM403
Liaison
Sortie
Module
Bluetooth HC05
ModbusDocto
r
Cable de
transmission de
données LIYY
Connecteur
RS485
Module radio
NRF24L01
Module WIFI
RV2
MyGenerator
Arduino Uno
USB HOST
SIM800L
24 VOLTS
Max485
Rasberry
APM403
RS485
ESP32
USB

Permettre le fonctionnement
suivi des des paramètres GE
de
50
Figure 36: Résultat Diagramme FAST
II.2.1.3 Analyse multicritère
Une analyse multicritère est une
méthode de comparaison permettant de déterminer le meilleur
élément dans une situation précise. L'analyse se
mène en confrontant plusieurs caractéristiques des
éléments à comparer. Ces caractéristiques seront
nommées critères. Chaque critère sera
pondéré selon son importance.
La démarche à suivre comporte 05 étapes
:
·
51
Identifier l'objectif de la démarche et le type de
décision
· Dresser la liste des solutions possibles ou
envisageables
· Dresser la liste des critères à prendre en
considération et les hiérarchiser
· Juger chacune des solutions par rapport à chaque
critère
· Désigner la solution qui obtient la meilleure
évaluation.
Il existe plusieurs approches mathématiques d'analyse
multicritère. Dans notre cas, nous alors utiliser la méthode WSM
(Weight Sum Method) car elle est l'idéal pour les problèmes
à une seule dimension.
II.2.1.3.1 Méthode WSM
Également appelée la somme
pondérée, cette méthode est la plus simple des
méthodes multicritères. Elle requiert que les critères
soient quantitatifs, qu'ils aient tous la même unité et qu'ils
s'étendent sur une même échelle ou gamme de valeurs ou
qu'ils soient tous normalisés.
En considérant la matrice de décision suivant ;
Tableau 13:Méthode WSM [21]
Critères
|
C1
|
|
C3
|
....
|
Cn
|
Poids relatifs aux critères
|
P1
|
P2
|
P3
|
....
|
Pn
|
A1
|
a11
|
a12
|
a13
|
.....
|
a1n
|
A2
|
a21
|
a22
|
a23
|
.....
|
a2n
|
A3
|
a31
|
a32
|
a33
|
.....
|
a3n
|
....
|
....
|
....
|
....
|
....
|
....
|
An
|
am1
|
am2
|
am3
|
.....
|
amn
|
|
La solution idéale est donnée par la formule
suivante :

II.2.1.3.2 Choix des composants
Le boitier de commande APM 403 dispose de trois sorties
à savoir : RS485, USB et USB HOST respectivement 14, 15 et 16 sur la
figure suivante.
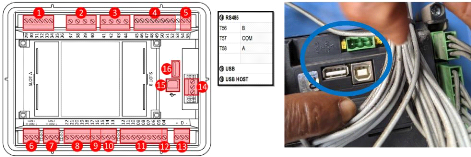
52
Figure 38: Présentation des sorties de l'APM403
[22]
Le constructeur du groupe a prévu que la communication
se fasse par le protocole Modbus via le port série RS485 raison pour
laquelle nous l'avons adopté pour la récupération des
informations du groupe électrogène. La figure suivante nous
présente le paramétrage de la communication du groupe SIMAR.
Figure 37: paramétrage de la communication sur le GE
SIMAR
a) Choix du microcontrôleur
Pour le choix du microcontrôleur adéquat pour le
projet, nous utiliserons la méthode WSM (Weight Sum
Method). Les critères retenus pour ce faire sont les suivants :
· C1 : Puissance de calcul
· : Consommation d'énergie
· C3 : Prise en main
· C4 : Faible coût
53
Critère
|
Score
|
|
|
C3
|
C4
|
|
4
|
3
|
3
|
2
|
|
16
|
16
|
10
|
10
|
162
|
Arduino
|
15
|
16
|
18
|
18
|
198
|
ESP32
|
18
|
18
|
17
|
15
|
207
|
|
Il apparait clairement de cette étude que le meilleur
microcontrôleur pour ce projet est l'ESP32. b)
Choix du media de transmission des données à distance
Tout comme pour le microcontrôleur, nous allons
utiliser la méthode WSM pour le choix de l'équipement de
transmission des données à distance. Ici, les critères
retenus sont :
· C1 : Portée
· : Consommation d'énergie
· C3 : Prise en main
· C4 : Faible coût
|
Critère
|
Score
|
|
|
C3
|
C4
|
|
5
|
3
|
2
|
2
|
|
16
|
15
|
10
|
10
|
165
|
Bluetooth
|
11
|
12
|
17
|
15
|
155
|
Wifi
|
14
|
15
|
13
|
13
|
167
|
|
Nous optons donc pour le wifi comme moyen de
transmission des données à distance.
Le choix des composants étant fait, nous pouvons donc
établir le schéma synoptique du fonctionnement de notre
système :
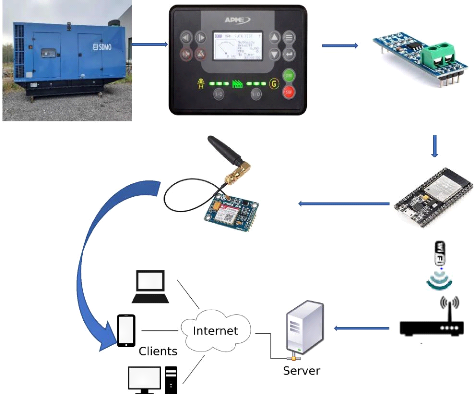
Liaison
Filaire
Liaison
filaire
Internet
Convertisseur RS485/TTL
Routeur
SMS
SIM800L
54
Figure 39: Schéma synoptique du fonctionnement de
notre système
II.3 CONCEPTION LOGICIELLE
Dans cette partie, nous présentons les étapes
suivies pour la simulation de partie matérielle conçue, la
programmation du microcontrôleur et la création de l'interface
graphique.
II.3.1 Conception du circuit sur EasyEDA
Après avoir dégagé les solutions
techniques, nous avons effectué le choix des composants en nous basant
sur plusieurs critères. Une fois les composants choisis, il est question
de réaliser un circuit qui regroupera ces derniers afin d'assurer
l'acquisition, le traitement et l'envoie des données des GE.
Pour donc concevoir notre circuit sur EasyEDA, nous avons de
façon chronologique :
· Ouvrir le logiciel EasyEDA ;
·
55
Lancer un nouveau projet ;
· Créer le schématique : Ce schéma
comprend les composants utilisés dans la conception, les connexions
entre les composants et les relations entre les groupes de composants dans
différents schématiques ;
· Effectuer le routage ;
· Simuler.
II.3.2 Programmation du Microcontrôleur
Pour élaborer un programme, l'on passe par 03
étapes à savoir : l'analyse, la traduction dans un langage de
programmation et enfin la production du programme.
II.3.2.1 L'analyse
L'analyse est la première étape. Elle consiste
à décrire ce que doit réaliser le programme partant du
cahier des charges et ce sans tenir compte du langage dans lequel il sera
écrit.
L'enchainement chronologique des activités qui
confèrent à la matière d'oeuvre sa valeur ajoutée
est appelé processus. Le processus est donc un ensemble de tâches
qui permettent de réaliser la fonction globale du système
automatisé. Le processus précise non seulement l'ordre de
succession des tâches mais également les évènements
qui déclenchent leur activité ou leur arrêt. Ces
évènements sont des informations en provenance de la partie
opérative (capteurs) et de l'opérateur (ordres, consignes de
réglages...).
L'analyse du processus peut être
représenté sous 3 formes différentes : un chronogramme, un
GRAFCET ou un algorigramme.
Dans ce travail, nous avons opté pour l'algorigramme
car sa transcription facile en langage de programmation évolué
propre au microcontrôleur. C'est une représentation graphique de
l'algorithme utilisant des symboles normalisés. Il s'agit d'un diagramme
qui permet de représenter et d'étudier le fonctionnement des
automatismes de types séquentiels comme les chronogrammes ou le GRAFCET
mais davantage réservé à la programmation des
systèmes microinformatiques ainsi qu'à la maintenance. Le
diagramme est une suite de directives composées d'actions et de
décisions qui doivent être exécutés selon un
enchaînement strict pour réaliser une tâche (ou
séquence).
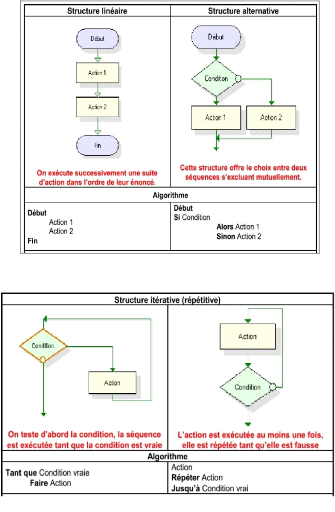
Figure 40: Structure linéaire et alternative
[23]
Figure 41: Structure itérative [23]
56
Il existe trois différentes structures possibles dans
un algorigramme à savoir : la structure linéaire, la structure
alternative et la structure itérative. Elles sont toutes
présentées sur les deux figures ci-dessous.
57
II.3.2.2 La traduction dans un langage de programmation
L'algorithme produit par l'analyse est traduit dans un texte
appelé code source. Celui-ci est écrit dans un langage choisi par
le programmeur ou imposé par les circonstances. Le langage choisi devra
pouvoir exprimer parfaitement toutes les subtilités de l'algorithme issu
de l'analyse. Dans le cadre de ce travail il s'agit du langage C.
Le C est un langage compilé (par opposition aux
langages interprétés). Cela signifie qu'un programme C est
décrit par un fichier texte, appelé fichier source. Ce fichier
n'étant évidemment pas exécutable par le microprocesseur,
il faut le traduire en langage machine. Cette opération est
effectuée par un programme appelé compilateur.
Un certain nombre de mots, appelés mots-clefs, sont
réservés pour le langage lui-même et ne peuvent pas
être utilisés comme identificateurs. L'ANSI C compte 33 mots clefs
qui sont: bit; auto; const; double; float; int; short; struct;
unsigned; break; continue; else; for; long; signed; switch; void; case;
default; enum; goto; register; sizeof; typedef; volatile; char; do; extern; if;
return; static; union; while.
II.3.2.3 La Production du programme
Les algorithmes une fois traduits dans un ou des langages de
programmations sont des textes à encoder à l'aide d'un
éditeur de texte. Des éditeurs spécialisés offrent
la possibilité d'avoir une syntaxe colorée qui selon le langage
de programmation distingue les mots clés, labels, mots
réservés, signes de ponctuation, délimiteurs, nombres,
chaînes de caractères etc. en attribuant à chacun de ces
éléments des couleurs distinctes ce qui en facilite la lecture.
Mieux encore, on dispose souvent d'Environnements de développement
Intégrés (IDE Integrated Development Environment) qui regroupent
dans une même application l'éditeur de texte, des éditeurs
graphiques pour les formulaires, les boîtes de dialogue et les images,
ainsi que d'autres outils indispensables à la construction d'une
application : le compilateur, l'éditeur de liens, le débogueur,
un système de gestion des versions etc. Le code source
rédigé dans un langage adapté à notre esprit humain
est par la suite interpréter ou compiler puis charger dans la
mémoire programme du microcontrôleur.
II.3.3 Conception de l'interface graphique
Le Langage de Modélisation
Unifié, de l'anglais Unified
Modeling Language
(UML), est un langage de modélisation graphique
à base de pictogrammes conçu comme une méthode
normalisée de visualisation dans les domaines du développement
logiciel et en conception
58
orientée objet. UML est destiné à
faciliter la conception des documents nécessaires au
développement d'un logiciel orienté objet, comme standard de
modélisation de l'architecture logicielle.
En effet, Dans la plupart des cas les concepteurs et les
utilisateurs ne sont pas des informaticiens. Il leur faut donc un moyen simple
d'exprimer leurs besoins. C'est précisément le rôle des
diagrammes de cas d'utilisation qui permettent de recueillir, d'analyser et
d'organiser les besoins, et de recenser les grandes fonctionnalités d'un
système. Il s'agit de la première étape UML d'analyse d'un
système.
Un diagramme de cas d'utilisation capture le comportement
d'un système, d'un sous-système, d'une classe ou d'un composant
tel qu'un utilisateur extérieur le voit. Il scinde la
fonctionnalité du système en unités cohérentes, les
cas d'utilisation, ayant un sens pour les acteurs. Les cas d'utilisation
permettent d'exprimer le besoin des utilisateurs d'un système, ils sont
donc une vision orientée utilisateur de ce besoin au contraire d'une
vision informatique.
Les éléments d'un diagramme de cas
d'utilisation sont :
· Un acteur : C'est l'idéalisation d'un
rôle joué par une personne externe, un processus ou une chose qui
interagit avec un système. Il se représente par un petit bonhomme
avec son nom (son rôle) inscrit dessous.
· Un cas d'utilisation : C'est une unité
cohérente représentant une fonctionnalité visible de
l'extérieur. Il réalise un service de bout en bout, avec un
déclenchement, un déroulement et une fin, pour l'acteur qui
l'initie. Un cas d'utilisation se représente par une ellipse contenant
le nom du cas (un verbe à l'infinitif), et optionnellement, au-dessus du
nom, un stéréotype.
· Une association : permet de relier un acteur et un cas
d'utilisation.
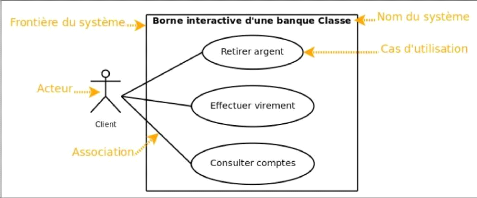
59
Figure 42: Exemple simplifié d'un diagramme de cas
d'utilisation [24]
CONCLUSION
Dans ce chapitre, nous avons présenté le
matériel utilisé, tout en insistant sur leur
spécification, ainsi que la méthodologie de conception de la
partie matérielle (APTE) et de la partie logicielle (UML). A travers la
formulation détaillée des différentes méthodes
utilisées pour la conception du système, nous pourrons facilement
dégager des résultats dans le prochain chapitre.
60

61
CHAPITRE III : RESULTATS ET DISCUSSION
INTRODUCTION
Dans ce chapitre, il sera question pour nous de
présenter et d'analyser les résultats de notre travail notamment
les résultats de la conception matérielle et logicielle. Enfin,
nous ferons une étude comparative entre la solution technologique que
nous proposons et celle existante sur le marché.
I. CHOIX DES PARAMETRES A MONITORER
Comme annoncé dans le chapitre précédent,
le choix des paramètres à monitorer se fera à
l'aide de la méthode AMDEC. Le tableau suivant nous
présente l'AMDEC du groupe électrogène SDMO.
Elément
|
Défaillance
|
Evaluation
|
Choix
|
|
Effet
|
Causes
|
Mode de détection
|
F
|
D
|
G
|
C
|
|
Coupure des
enroulements
|
Pas de
tension à
la sortie
|
Accidentelle
|
Visuel
|
1
|
3
|
3
|
9
|
|
|
|
Visuel
|
1
|
3
|
3
|
9
|
|
Stator
|
Coupure des
enroulements
|
|
Visuel
|
1
|
3
|
3
|
9
|
|
|
|
Visuel
|
1
|
3
|
3
|
9
|
|
Ventilateur
|
Insuffisance d'air
|
Arrêt du
GE
|
Rupture courroie
|
|
4
|
4
|
32
|
|
Radiateur
|
Obturation
|
|
|
4
|
4
|
16
|
|
Pompe à
eau
|
Débit insuffisant
|
|
|
4
|
4
|
16
|
|
Réservoir
|
Fuite
|
Arrêt du
GE
|
Rouille, choc
|
|
4
|
4
|
16
|
|
|
Injecteur
|
Injection à baisse pression
|
Baisse de
performan ce
|
Déréglée
|
|
2
|
3
|
3
|
12
|
|
Batterie
|
Tension insuffisante
|
Pas de
démarrage
|
Défaut alternateur
|
Mesure
|
2
|
3
|
3
|
12
|
|
Capteurs
|
Pas de signaux
|
Aucune sécurité
|
Pas d'alimentation, vieillissement, court-circuit
|
Visuel
|
1
|
4
|
4
|
16
|
|
Vilebrequin
|
Jeu
|
Baisse des performan ces
|
Usure des
coussinets
|
|
4
|
4
|
16
|
|
|
|
4
|
4
|
16
|
|
Bielle
|
Jeu
|
Baisse des performan ces
|
Usure des
coussinets
|
|
4
|
4
|
16
|
|
Piston
|
Jeu
|
|
|
4
|
4
|
16
|
|
|
Maintenance corrective Maintenance préventive
62
De ce qui précède, il ressort clairement que le
système d'alimentation en carburant, le système de
refroidissement, l'alternateur, le système de démarrage et les
parties mobiles et fixes doivent faire l'objet d'une surveillance permanente
afin d'éviter des arrêts brusques du groupe
électrogène. Nous retenons ainsi les paramètres suivants
:
· Température du moteur : Cette
valeur permet de connaître les conditions thermiques de fonctionnement,
en tenant compte de la charge du moteur, de la température ambiante et
de l'efficacité de sa ventilation. Il est donc important de surveiller
cette température afin de s'assurer qu'elle ne sorte pas de sa plage de
fonctionnement faute de quoi on assiste à une surchauffe qui peut
occasionner l'usure des pièces.
· Pression d'huile : il est important
de surveiller la pression d'huile car si elle baisse, le moteur du Groupe
électrogène ne sera plus refroidi correctement ce qui pourrait
causer le grippage de ses organes et des pannes bien plus graves.
·
63
Niveau de carburant : le carburant sert au
fonctionnement direct du moteur thermique du groupe électrogène.
En cas de manquement, le GE cessera automatiquement de fonctionner. La
surveillance du niveau de carburant permettra donc d'assurer un fonctionnement
ininterrompu du GE, une réduction des coûts de carburant et
d'exploitation, la prévention des pannes et donc la prolongation de la
durée de vie du GE.
· Régime moteur : la tension de
sortie du générateur est étroitement liée à
la vitesse de rotation du moteur. Il est donc important de garder le moteur au
bon régime ou à peu près pour maintenir le courant
électrique à une fréquence de 60 Hz et produire la tension
appropriée.
· Tension de la batterie : pour la mise
en route du GE, le démarreur a besoin d'être alimenté en
tension continue pour fonctionner et c'est à la batterie de le faire.
Cependant, lorsque la tension de la batterie est inférieure à 12
V, elle ne peut plus accomplir sa mission : le groupe ne pourra donc pas
démarrer. Il est donc primordial pour celui en charge des groupes,
d'avoir une visibilité sur la valeur de la tension de la batterie.
· Puissance active : la puissance
représente la quantité d'énergie fournie par unité
de temps d'un système à un autre. Pour dimensionner la puissance
du GE, il est primordial de recenser toutes les charges. Nous comprenons donc
qu'il y `a une corrélation entre la puissance et la charge. En
fonctionnement, on peut se trouver en surcharge et ceci aura un impact
significatif le groupe.
II. RESULTAT DE LA CONCEPTION MATERIELLE
II.1 PRESENTATION DE LA CARTE ELECTRONIQUE
FABRIQUEE
II.1.1 PRESENTATION DU FICHIER SCHEMATIQUE CONCUE SUR
EASYEDA
Les figures suivantes présentent le câblage des
différents groupes fonctionnels (du point de vue schématique)
nécessaires à la réalisation de la fonction de monitoring
par la carte.
La première figure présente le bloc
d'alimentation. Sur notre APM403, nous avons une source d'alimentation
disponible de 24 Volts. Dans notre projet, les composants ESP32, SIM800L et
MAX485 consomment du 3.3 et 5 Volts pour leur fonctionnement. Ainsi pour
alimenter ces derniers, nous avons intercalés des régulateurs de
tension LM2596S-5.0/TR (tension d'entrée : 4.5-40V, tension de sortie
:5V) et LM1117IMPX-3.3/NOPB (tension d'entrée max : 15V, tension de
sortie : 3.3V).
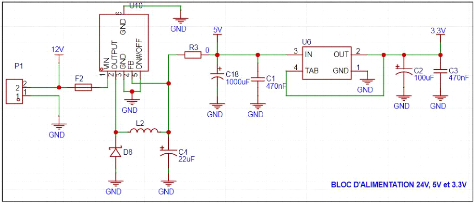
64
Figure 44: Bloc d'alimentation
La seconde figure nous présente le câblage de
notre microcontrôleur ESP32. Ce dernier est connecté à
quasi tous les composants de notre carte électronique et c'est lui qui
se charge du de la récupération et l'envoie des
données.
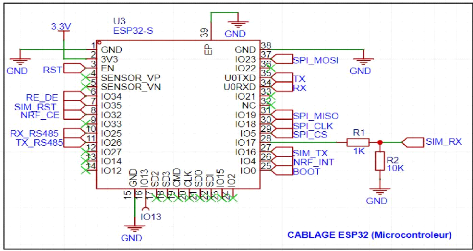
Figure 43: Câblage de l'ESP32
La troisième figure présente le circuit de BOOT
et de RESET de notre microcontrôleur. Les deux boutons EN et BOOT de la
carte permettent de contrôler l'état de l'ESP32. EN : Ce bouton,
appelé également RESET permet de redémarrer de force
l'ESP32. BOOT : L'utilisation seule de ce bouton n'a pas grand
intérêt. Il agit sur le comportement de l'ESP32 lors du
démarrage (lors du boot).
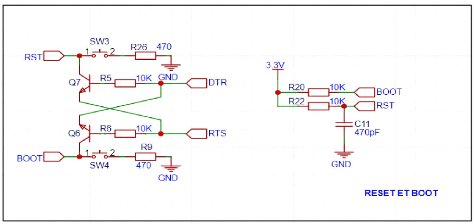
65
Figure 45: câblage des boutons reset et boot
La quatrième figure nous présente le
schéma de câblage du module radio NRF24L01. Ce module est
connecté à l'ESP32 d'où il recoit des informations et les
émet à une fréquence de 2.4 GHz.
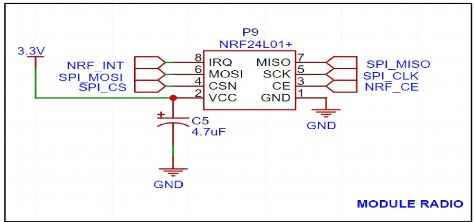
Figure 46: Câblage du module radio NRF24L01
La cinquième figure présente le schéma de
câblage de notre convertisseur TTL to RS485 encore
appelé
MAX485. Ce dernier se charge de récupérer les informations au
niveau du groupe
électrogène, via le protocole de communication
MODBUS, puis il convertit ces données en langage compréhensible
par notre microcontrôleur.
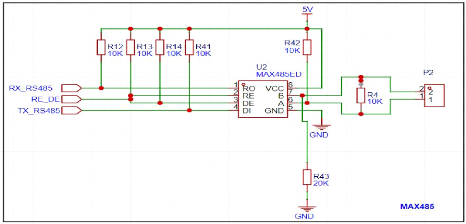
Figure 47: Câblage du MAX485
La sixième figure présente le câblage de
la communication série. Ici il s'agit du port USB. Nous allons utiliser
ce port pour téléverser le programme sur notre carte et pour des
éventuelles opérations de maintenance.
En outre, sur ce schéma, on peut voir qu'en dehors de
notre sortie USB, on dispose également d'un convertisseur CP2102-GMR. Il
se branche sur le port USB et permet d'envoyer et recevoir les signaux
TTL/CMOS. C'st grâce à lui que l'ESP32 se met automatiquement en
mode FLASH lors du téléversement.
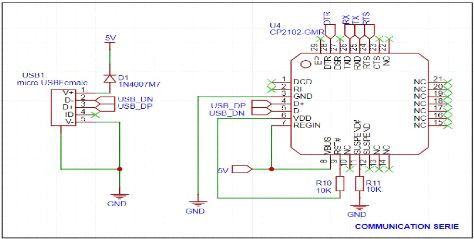
Figure 48: câblage de la communication
série
66
La dernière figure nous présente le câblage
des diodes électroluminescentes témoins de fonctionnement des
différents composants.
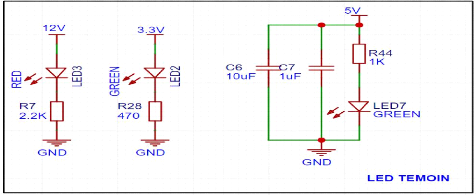
Figure 49: câblage des LED du circuit. II.1.2
PRESENTATION DU FICHIER PCB
Les fichiers PCB stockent des informations sur la disposition,
les connexions et d'autres spécifications de conception d'une carte de
circuit imprimé. Ils contiennent diverses données telles que des
dimensions, des couches, des guides de perçage, des masques, etc.
Les figures suivantes nous présentent respectivement
les faces de dessus et de dessous de notre carte de circuit imprimé.
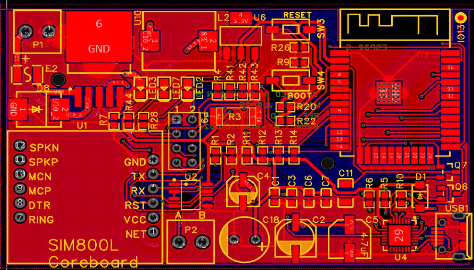
Figure 50: Vue de dessus de notre carte
67
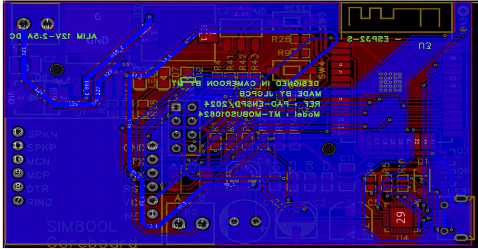
68
Figure 51 Vue de dessous de notre carte II.1.3 VUE 2D
DE LA CARTE ELECTRONIQUE
La figure suivante nous présente une vue 2D de notre carte
de circuit imprimé.
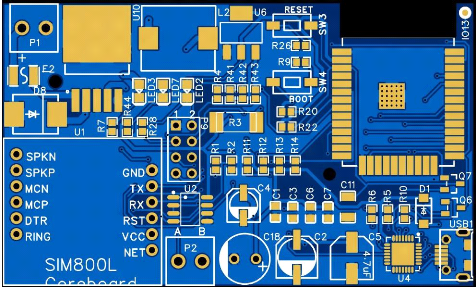
Figure 52: Vue 2D de notre carte
électronique
II.1.4 VUE 3D DE LA CARTE ELECTRONIQUE
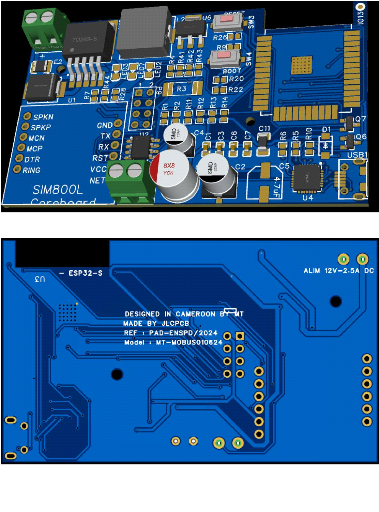
Figure 54: Vue de dessus
Figure 53: Vue de dessous
69
Cette vue nous permet de visualiser notre carte avec ses
composants. Elle nous donne un aperçu de la carte physique avant
fabrication. La suite nous en fait une représentation.
70
II.1.5 PRESENTATION DE LA CARTE FABRIQUEE
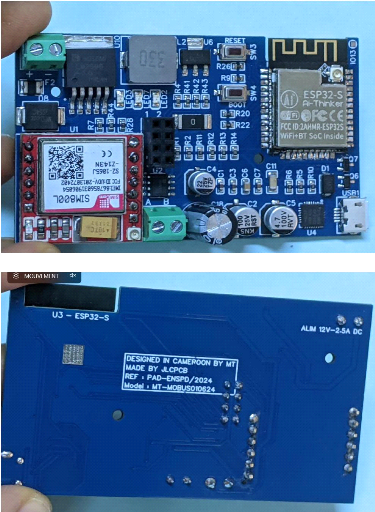
Figure 56: Vue de dessus
Figure 55: Vue de dessous
71
II.2 PRESENTATION DU BOITIER DE PROTECTION II.2.1
PRESENTATION DE LA CONCEPTION SUR SOLIDWORKS
Les figures suivantes nous présentent la conception du
boitier de protection de carte électronique sur SolidWorks.
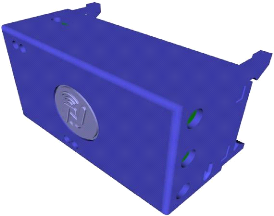
Figure 57: Boitier de protection sur SolidWorks
II.2.2 PRESENTATION DU BOITIER APRES IMPRESSION 3D

Figure 58: Boitier imprimé
72
II.2.3 PRESENTATION DE LA PASSERRELLE
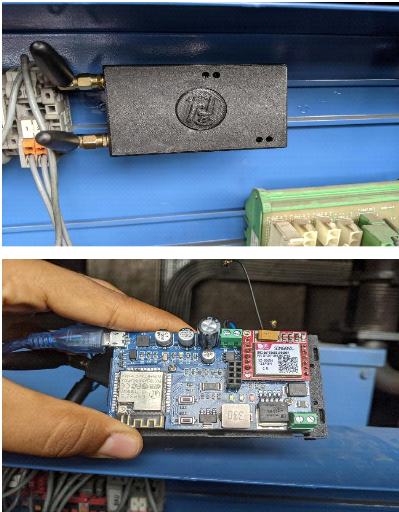
Figure 59: Passerelle
III. RESULTAT DE LA CONCEPTION LOGICIELLE III.1 RESULTAT
DE LA PROGRAMMATION DU MICROCONTROLEUR III.1.1 RESULTAT DE
L'ANALYSE
Comme évoquée dans la partie méthode, la
programmation d'un microcontrôleur nécessite une analyse
préalable. Cette dernière est présentée sous forme
d'un algorigramme.
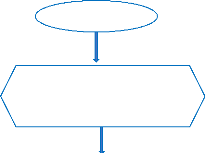
Initialisation Initialisation des modules radio
; sim800l.
Début
Configuration des paramètres de communication (vitesse
=9600b/s)
Envoie des données du GE vers l'ESP32
Envoie des données de l'ESP32 vers
le
téléphone
Réception des données par le
téléphone
Visualisation

Fin
73
Figure 60: Résultat de l'algorigramme
III.1.2 PRESENTATION D'UN ECHANTILLON DU
CODE
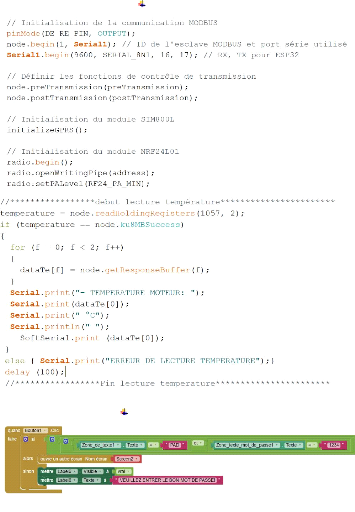
Code Arduino
Code APP INVENTOR
74
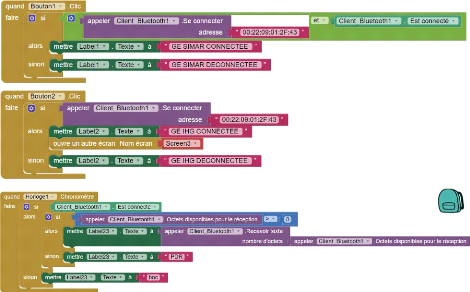
75
III.2 RESULTAT DE LA PROGRAMMATION DE L'INTERFACE
GRAPHIQUE
III.2.1 DIAGRAMME DES CAS D'UTILISATION
Le diagramme des cas d'utilisation suivant présente les
différentes actions que la passerelle est en mesure d'assurer.
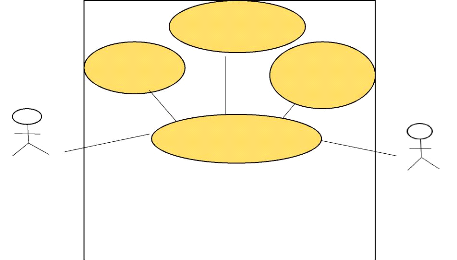
Envoyer une requête
Gérer les registres
Gérer les
paramètres Modbus
Communication via le protocole Modbus
Technicien
Groupe électrogène
Figure 61: Diagramme des cas d'utilisation lors de la
communication sur le bus
76
Lors de la communication Modbus avec l'APM403, plusieurs
actions peuvent être menées notamment l'envoie des requêtes,
la modification des paramètres de communication et la gestion des
registres.
Dans ce projet, il est question de communiquer à
distance avec l'APM à partir d'une interface. Ainsi donc, le diagramme
des cas d'utilisation suivant illustre nos attentes vis-à-vis de notre
interface.
Se connecter au GE
Configurer le GE
Technicien
Observer les
paramètres en
temps réel
Consulter
l'historique des
données
Figure 62: Résultat du diagramme des cas
d'utilisation
Dans un premier temps l'utilisateur se connecte au
système, (via une connexion internet), faute de quoi aucune action n'est
possible.
Une fois connecté il pourra :
v Configurer le système : c'est-à-dire choisir
le GE dont il souhaite visualiser les paramètres.
v
77
Observer les paramètres en temps réels : notre
application MyGenerator propose une fenêtre dans laquelle l'utilisateur
peut visualiser la température du moteur, la pression, la tension, le
régime, la puissance, le niveau de carburant. En plus, on aura le
programme de maintenance préventive.
v Consulter l'historique de fonctionnement des données
: il s'agit ici de renseigner l'utilisateur sur les états passés.
Bien exploité il peut servir de retour d'expérience afin de mieux
évaluer le fonctionnement. On aura une interface pour la
présentation des statistiques.
Une fois ces différentes attentes cernées nous
avons procédé à la mise sur pied d'une interface
graphique.
III.2.2 PRESENTATION DE L'APPLICATION NMT
La figure 64 nous présente la page d'accueil de notre
application. Sur cette page, l'utilisateur d'identifie en renseignant son nom
d'utilisateur ains que son mot de passe. Lorsque ces deux
informations sont authentiques, il peut passer à la page
suivante.
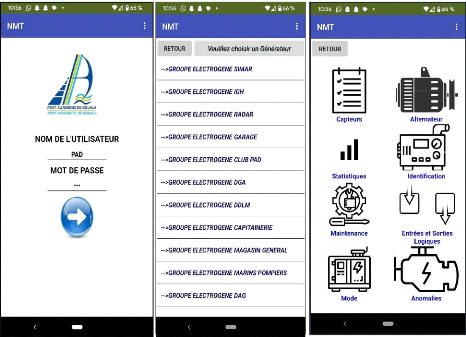
Figure 65: Page d'accueil Figure 65: Choix du GE Figure 65:
Choix du paramètre
à visualiser
78
La page suivante (figure 65) recense tous les groupes que l'on
monitore. Pour l'instant, nous nous sommes arrêtés sur le cas du
groupe SIMAR. A ce stade, l'utilisateur clique sur le groupe dont il souhaite
visualiser les paramètres. Une fois fait, la connexion s'établira
entre le groupe et son téléphone, puis la page suivante s'ouvrira
automatiquement.
Désormais l'utilisateur peut visualiser les
paramètres su GE à travers cette page qui suit (figure 66). Il
peut avoir accès aux données des capteurs au niveau du moteur et
de l'alternateur, il peut visualiser les statistiques, les entrées et
sorties logiques, le mode du générateur ainsi que les anomalies
de ce dernier. Il suffit donc de cliquer sur le bouton qui nous
intéresse.
Les pages suivantes nous présentent donc les
différentes interfaces fonction du choix effectué.
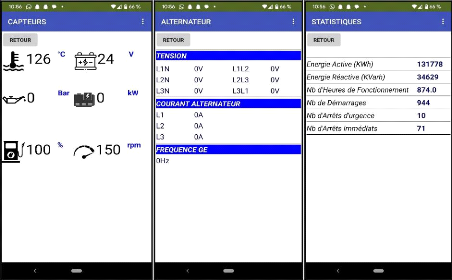
Figure 68: Capteurs Figure 68: Alternateur Figure 68:
Statistiques
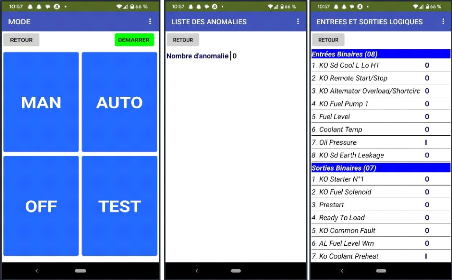
79
Figure 73: Mode du GE Figure 73: Liste des Alarmes Figure 73:
Entrées et sorties
logiques
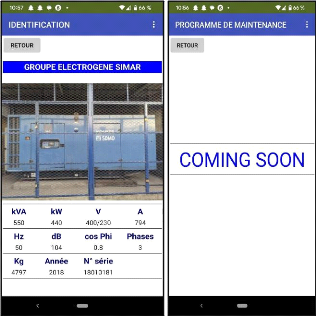
Figure 70: Identification du GE Figure 70:
Maintenance
80
III.2.3 PRESENTATION DE L'APPLICATION MyGeneratorWeb et
Vérification
Ici, il s'agit de se rassurer de l'authenticité de
l'information visualisé. Pour ce faire nous allons présenter
simultanément les photos de l'interface APM403 et celles de notre
application Web MyGenerator.
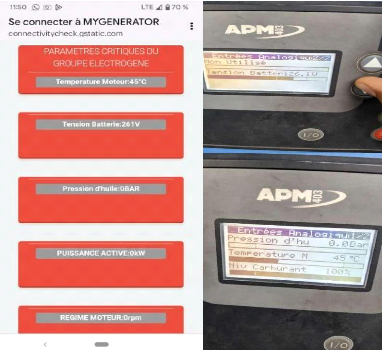
Figure 74: Visualisation des capteurs
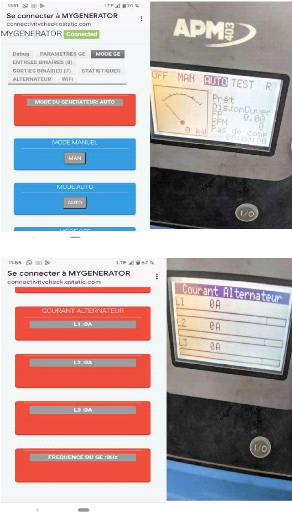
Figure 75: Visualisation du mode
Figure 76: Visualisation du courant Alternateur
81
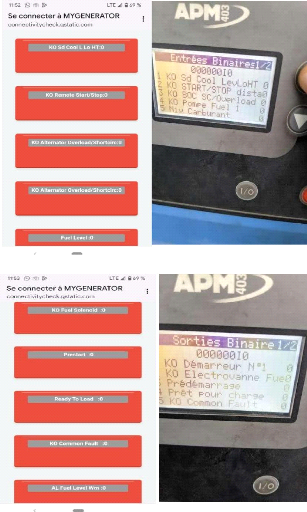
Figure 78: Visualisation des entrées
Figure 77: Visualisation des sorties
82
83
IV. ANALYSE DES COUTS
IV.1 COUT DU PROJET
Pour la réalisation de notre projet, nous avons
engagé des dépenses. Ces dernières sont recapitulés
dans le tableau suivant.
Tableau 14: Coût du projet
|
DESIGNATION
|
COUT (FCFA)
|
QUANTITE
|
TOTAL (FCFA)
|
|
Matériel Pour Les Tests
|
|
Module ESP32
|
7 000
|
1
|
7 500
|
|
Cordon type C
|
1 000
|
1
|
1 000
|
|
Module NRF24L01 (récepteur et transmetteur)
|
15 000
|
1
|
15 000
|
|
Max485
|
5 000
|
2
|
10 000
|
|
Module Bluetooth hc05
|
3 000
|
1
|
3 000
|
|
USB TO RS485
|
10 000
|
1
|
10 000
|
|
SIM800L GPRS GSM
|
7 000
|
1
|
7 000
|
|
Message du mois
|
500
|
-
|
500
|
|
Câbles
|
2 000
|
-
|
1 000
|
|
Plaque à essaie
|
1 000
|
2
|
2 000
|
|
Réalisation De La Carte
|
|
Fabrication de la carte chez JLPCB
|
99 500
|
-
|
99 500
|
|
Pièces manquantes (ESP32 et SIM800L) + soudure
|
15 000
|
2
|
30 000
|
|
Frais de douanes
|
66 000
|
-
|
66 000
|
|
Transport
|
20 000
|
1
|
20 000
|
|
Réalisation Du Boitier
|
|
Un rouleau de filament PLA
|
18 000
|
1
|
18 000
|
|
Frais d'impression
|
20 000
|
-
|
20 000
|
|
TOTAL
|
310.500 FCFA
|
La réalisation de ce projet nous a couté la somme
de 310 500 FCFA.
IV.2 COUT DU PRODUIT EXISTANT SUR LE MARCHE
Sur le marché, il existe des modules de monitoring. Le
fabricant des groupes SDMO lui-même en propose. Le tableau suivant nous
présente ces différents produits avec leur prix.
84
SOLUTIONS DISPONIBLES SUR LE MARCHE
|
|
DESIGNATION
|
PRODUIT
|
PRIX
|
REFERENCES
|
|
Carte TARJETA APM403
GSM/GPS
|
|
1 760 000FCFA
|
Bon de
Commande
PAD.
|
|
|
Passerelle de surveillance à distance ELMAG DSE 890 Webnet
pour groupe électrogène.
|
3 196,80 € soit
2 097 100,14
FCFA
|
PROFISHOP
|
|
|
|
|
IV.3 COUT DU PRODUIT PROPOSE
Maintenant que nous détenons le produit, il sera question
de se lancer dans une production en série. Ainsi, nous proposons notre
produit à la somme de 500 000FCFA l'unité. Les
avantages sont les suivantes :
- Acquisition de la technologie,
- Main d'oeuvre pour la maintenance sur place,
- Possibilité de revoir le cahier de charges,
- Consommation locale,
- Très bon rapport qualité prix.
CONCLUSION
Dans ce chapitre, il était question de présenter
l'ensemble des résultats de nos travaux. En rappel, notre système
de monitoring comporte une partie matérielle et une partie logicielle.
Concernant la première partie, elle s'est soldée par la
réalisation d'une carte électronique (dont le rôle est de
récupérer les informations du GE et de les mettre à
disposition dans le serveur) et d'un boitier (qui sert à protéger
la carte électronique du milieu ambiant). Pour la seconde partie, nous
avons conçue et déployé l'application mobile MyGenerator.
Au terme de ceci, nous avons fait une évaluation des coûts et
avons opté pour la mise du produit sur le marché au prix de
120.000FCFA l'unité.
85
CONCLUSION GENERALE
L'objectif de ce travail était de mettre sur pieds un
système de surveillance des groupes électrogènes en temps
réel. Avec les coupures d'énergie qui sont de plus en plus
fréquentes, les rondes de vérification des paramètres des
générateurs s'accentuent, mettant ainsi en mal le service en
charge de la gestion de ces groupes. Nous avons proposé dans ce projet
un moyen de réduire ces rondes en créant une application mobile
pour le personnel et une passerelle. Pour mener à bien ce travail, nous
avons tout d'abord présenté les généralités
notamment sur la surveillance en nous attardant sur son principe qui consiste
en l'acquisition, le traitement, la transmission et la consultation des
données. Par la suite, nous avons utilisé la méthode APTE
pour la conception de la passerelle ce qui a débouché sur une
carte électronique et la méthode ULM pour la conception de notre
application mobile MyGenerator. Enfin, nous avons effectué une analyse
des coûts. Il en ressort que le projet nous a coûté en tous
310 500FCFA. Nous comptons initier la production en série de notre
produit et le positionner sur le marché au prix imbattable de 500
000FCFA par groupe électrogène.

ANNEXES
PRESENTATION DE L'ENTREPRISE
HISTORIQUE DU PORT AUTONOME DE DOUALA (PAD)
Le PAD a été créé par
décret d'application n°99/130 du 15 juin 1999 de la loi cadre
n°98/021 définissant la reforme portuaire au Cameroun. C'est une
société à capital public dotée d'une autonomie
financière.
Tableau 15: Historique du PAD
|
Date
|
Evènement
|
|
1881
|
Premiers travaux de la « woermann line » en vue de
faciliter l'accostage des embarcations
|
|
1922
|
Adoption du plan d'extension du port de douala
|
|
1950
|
Création d'un service spécial des ports et voies
navigables du Cameroun
|
|
1960
|
Indépendance, le service des ports et voies navigables
est rattaché au ministère des transports
|
|
1971
|
Création de l'office national des ports du Cameroun
|
|
1976
|
Vaste programme d'extension du port du Cameroun
|
|
1980
|
Extension du port de douala (1000ha)
|
|
1997
|
Table ronde sur l'activité maritime
|
|
1998
|
Loi d'orientation
|
|
1998
|
Création d'une autorité portuaire nationale et de
04 ports autonomes
|
|
2000
|
Réduction des couts de passage portuaire
|
|
2002
|
Modernisation du terminal à conteneurs
|
|
2005
|
Mise en concession des activités industrielles et
commerciales (remorquage/lamage, terminal à conteneurs)
|
|
2008
|
Installation des systèmes de vidéo surveillance et
radars
|
ADRESSE COMPLETE DU PAD Tableau 16: Adresse du
PAD
|
Nom complet
|
Port Autonome de Douala
|
|
Sigle
|
PAD
|
|
Année de création
|
15 juin 1999
|
|
Siège social
|
Douala, Bonanjo (guichet unique)
|
II
Boite postale
|
4020 Douala
|
|
|
Téléphone
|
(+237)243 42 01 33/ (+237)243 42 73
|
22
|
|
Fax
|
(+237)243 42 67 97
|
|
|
Site internet
|
Https : www.portdedouala-cameroun
|
|
|
E-mail
|
pad@portdedouala-cameroun.com
|
|
|
Nom du directeur
|
Cyrus NGO'O
|
|
|
Secteur d'activité
|
Secteur portuaire
|
|
ORGANIGRAMME DU PAD
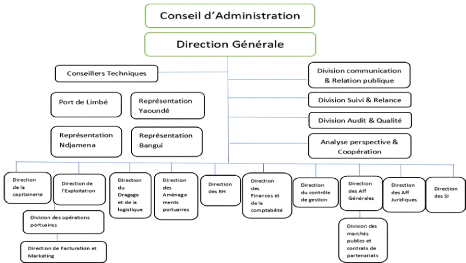
Figure 79: Organigramme du PAD
SITUATION GEOGRAPHIQUE
Le PAD est situé dans la ville de Douala, au niveau de
l'estuaire du fleuve Wouri sur la cote littorale et donne sur l'océan
Atlantique. C'est la principale porte maritime de la façade atlantique
du Cameroun, à mi-chemin entre l'Afrique du Nord et l'Afrique du Sud. Il
a pour coordonnées géographiques 04°03'5 de latitude Nord,
09°41'8 de longitude Est et couvre une superficie de 1000 ha donc 600 ha
en exploitation. La figure suivante nous permet d'observer la position
géographique du Port Autonome de Douala sur la carte de la ville.
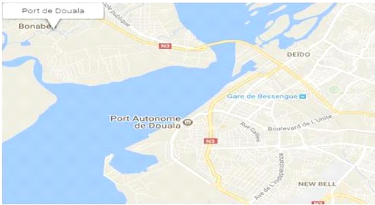
Figure 80: Situation géographique du PAD
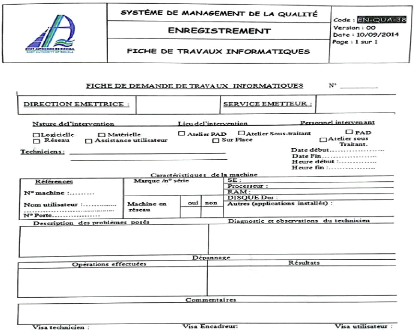
III
Figure 81: Fiche de travaux informatiques
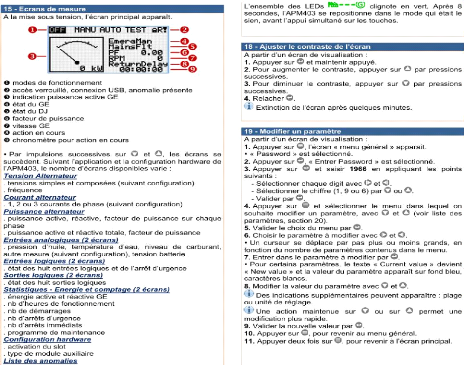
iv
Figure 83: Extrait du datasheet de l'AMP403
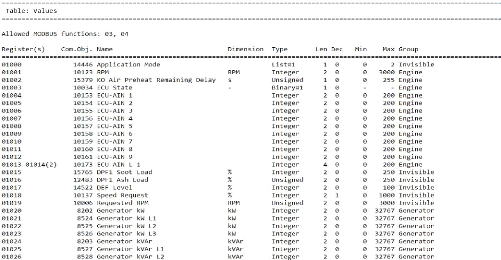
Figure 82: Extrait de la table Modbus des AMP
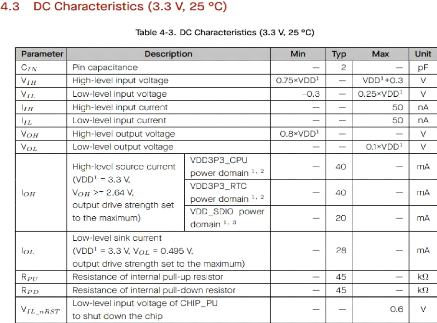
V
Figure 84: Extrait du datasheet de l'ESP32
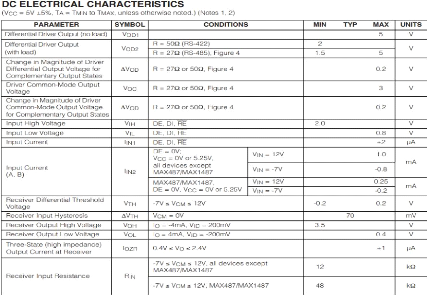
Figure 85: Extrait du datasheet du max485
vi
REFERENCES BIBLIOGRAPHIQUES
[1] Dictionnaire Robert. (s.d.). Surveillance. Dans
Dictionnaire de la langue française, consulté le [06/05/2024], de
https://www.dictionnaire.com/francais/surveiller
[2] Larousse. (s.d.). Système. Dans Dictionnaire
Larousse en ligne, consulté le [insérer la date de
consultation]de
https://www.larousse.fr/dictionnaires/francais/syst%C3%A8me/74617.
[3] -Wikipédia, Télémétrie
[4] GREENBERG.PATTERSON. CANLAS, LA MACHINE NE FERME JAMAIS
LES YEUX, UNE HISTOIRE DE LA TELESURVEILLANCE de « 1984 » à
Facebook.
[5] VINCENT COCQUEMPOT. Contribution à la surveillance
des systèmes industriels complexes. Automatique / Robotique.
Université des Sciences et Technologie de Lille - Lille I, 2004.
(tel-00197595)
[6] VINCENT COCQUEMPOT. Contribution à la surveillance
des systèmes industriels complexes. Automatique / Robotique.
Université des Sciences et Technologie de Lille - Lille I, 2004.
(tel-00197595)
[7] «
http://champphotovoltaique.free.fr/telegestion.php
»
[8] «
http://geii.en.free.fr/MN03.pdf
»
[9] Manuel d'utilisation et d'entretien des groupes
électrogènes KHOLER SDMO.
[10] «
https://fr.wikipedia.org/wiki/Modbus
»
[11] HARNESS. « Cours systèmes embarqués :
le bus rs485 modbus-profibus » 2020.
[12] CYBELLIUM LTD. Mastering SCADA. (n.d.).
(n.p.).
[13] SAMI HADHRI , « Developper des applications mobiles
avec Android Studio » 2019.
[14] Manuel d'utilisation AMP403
[15] Pr ESSOLA, Université de Douala, « cours
ANALYSE FONCTIONNELLE » 2023.
[16] BERTRAND DE LA BRETESCHE, « ANALYSE DE LA VALEUR,
ANALYSE FONCTIONNELLE » 2000...
[17] Pr ESSOLA, Université de Douala, « cours
ANALYSE FONCTIONNELLE » 2023.
[18] Pr AYISSI, Université de Douala, « cours
ECOCONCEPTION » 2024.
[19] Mr MAH, Université de Douala, « cours de
MOTEURS A COMBUSTION INTERNE ».
[20] Pr ESSOLA, Université de Douala, « cours
ANALYSE FONCTIONNELLE » 2023.
[21] M ISSONDJ, Université de Douala, « cours
ANALYSE MULTICRITERE » 2023.
[22]
vii
KHOLER SDMO « APM403 Communication », 16/11/2018
[23] Dr IDELLETTE SOM, Université de Douala, «
cours AUTOMATISME INDUSTRIEL », 2022
[24] M NANFACK, Université de Douala, « cours
PROGRAMMATION DES MICROCONTROLEURS » ; 2023
| 

