|
République Algérienne Démocratique et
Populaire
Ministere de l'Enseignement Supérieur et de la Recherche
Scientifique
Université Ferhat Abbas S'etif
Faculté des Sciences exactes Département
Informatique
Mémoire de fin de cycle
En vue de l'obtention du diplôme d'ingénieur
d'état en
Informatique
Theme
La reconnaissance des objets polyedrique
Encadr'e par: R'ealis'e par:
Mme Ait Kaci Azzou Samira Mr Saidani Abderrezak
Mr Felouah Mourad
Jury
Pr'esident :
Mr
Examinateurs :
Mr
Mr
Table des matières
Table des Matières i
Table des Figures v
Introduction Générale 1
1 Les méthodes de reconstrution 3D 3
1.1 Introduction 3
1.2 La vision par ordinateur 3
1.3 description d'un systeme de vision par ordinateur 4
1.3.1 Definition 4
1.3.2 Classification des systemes de vision par ordinateur 5
1.3.2.1 Les systèmes de vision bidimensionnelle 5
1.3.2.2 les systèmes de vision tridimensionnelle 5
1.4 La reconstruction 3D 5
1.4.1 Les deffirentes approches de la reconstruction
tridemensionnelle . 5
1.5 Techniques de reconstruction 3D 7
1.5.1 La vision stéréoscopique 7
1.5.1.1 Principe 7
1.5.1.2 L'appariement 8
1.5.1.3 La triangulation 8
1.5.2 Reconstruction a` partir de géométrie
epipolaire 10
|
|
1.5.3 Technique basésur les ombrages ou Shape from
shading
1.5.4 Représentation par détection de
déformation de formes
1.5.5 Méthodes basées sur l'extraction de
squelette
1.5.6 La reconstruction par des jonctions
caractéristiques
1.5.7 Shape From Motion: Reconstruction a` partir du mouvement .
. .
13
|
12
12
13
14
|
|
|
1.5.7.1 L'approche basée sur la mise en correspondance
|
15
|
|
|
1.5.7.2 L'approche du flot optique
|
15
|
|
|
1.5.8 Méthode par space carving (creusage d'un volume 3D)
|
16
|
|
1.6
|
Conclusion
|
16
|
|
2
|
La reconnaissance des objets 3D
|
17
|
|
2.1
|
Introduction
|
17
|
|
2.2
|
Classification des systém de reconnaissance des objets
polyedrique
|
18
|
|
|
2.2.1 Acquisition et Représentation Informatique du
modèle 3D
|
18
|
|
|
2.2.2 Principales approches d'appariement
|
19
|
|
2.3
|
La reconnaissance par apparence
|
25
|
|
|
2.3.1 définition et caractérisation
|
25
|
|
|
2.3.2 Modelisation globale
|
26
|
|
|
2.3.3 Modélisation locale
|
27
|
|
2.4
|
Conclusion
|
28
|
|
3
|
La conception et resultat d'experementation
|
29
|
|
3.1
|
Introduction
|
29
|
|
3.2
|
La reconnaissance des objets polyédrique
|
29
|
|
|
3.2.1 Choix des primitives
|
29
|
|
|
3.2.2 L'algorithme développépour la reconnaissance
des objets polyédrique 30
|
|
|
3.2.3 algorithme pour la localisation
|
30
|
|
|
3.2.3.1 Estimation des primitives
|
31
|
|
3.3
|
Calcul de la carte de profondeur
|
33
|
|
|
3.3.1 Modèle géométrique de système
de vision [Ait06]
|
33
|
|
|
3.3.1.1 Description du système
|
33
|
3.3.2 Coordonnée projectifs avant et après rotation
35
3.3.3 Relations entre les cordonnes 2D et 3D 36
3.3.4 Conclusion 37
3.4 Suivi d'un segment dans une séquence d'images [ISR07]
38
3.4.1 'Equation de mouvement d'un segment I : 38
3.4.1.1 Application de la méthode 38
3.4.1.2 Algorithme De Suivi : 40
3.5 Résultat d'experementation 41
3.5.1 Application a` des images de synthése 41
3.5.2 Application a` des images réelles 44
3.6 Conclusion 47
4 Environnement de réalisation et d'expérimentation
48
4.1 Introduction 48
4.2 L'envirennement de l'experementation 48
4.3 Langage de programmation 48
4.4 Présentation de l'application 49
4.5 Conclusion 56
Conclusion Générale 57
Bibliographie 59
Annexe A 61
Annexe B 63
Table des figures
1.1 Sch'ema fonctionnel d'un système informatique pour la
vision artificielle. . 4
1.2 Une reconstruction projective a` droite 6
1.3 Une reconstruction affine a` droite 6
1.4 Une reconstruction euclidienne a` droite 6
1.5 Synoptique g'en'eral de la vision st'er'eoscopique . 8
1.6 Une configuration possible d'un cube triangul'e. 9
1.7 La configuration miroir d'un cube triangul'e. 9
1.8 M'ethode de reconstruction. 11
1.9 application de la SFS sur une image 2D. 12
1.10 polygones triangulaires d'un lapin et d'une poire. 13
1.11 Squelettes topologiques de quelques objets 13
1.12 Type de jonction 14
1.13 Processus de reconstruction 3D a` partir d'un mouvement
16
1.14 M'ethode par space de l'objet 16
2.1 Sch'ema de l'algorithme d'indexation g'eom'etrique 21
2.2 Exemple de cas o`u un modèle est pr'esent dans la
scène. Les coordonn'ees
d'un sous-ensemble des points du modèle sont les
mêmes que celles d'un
sous ensemble des points de la scène. 22
2.3 sch'ema processus du d'indexation 24
3.1 Organigramme de la m'ethode de reconnaissance automatique des
objets. . 30
3.2 Mod'elisation g'eom'etrique de la tête de vision
st'er'eoscopique 34
3.3 Une sequence de trois images. 41
3.4 Extraction des segment de droite des trois images. 42
3.5 Calcul des angles de rotation. 42
3.6 La carte de profondeur. 43
3.7 La reconstruction projective de la scene. 43
3.8 Localisation de l'objet dans la scene. 44
3.9 Sequence d'image reelle 44
3.10 Extraction des segments de contours 45
3.11 Calcul des angle de rotation 45
3.12 La carte de profondeur 46
3.13 La scene reconstruite 46
3.14 Localisation de l'objet dans la scene 47
Remerciements
Nous remercions vivement notre promotrice Mme Ait
Kassi Azzou Samira pour avoir acceptéde nous encadrer, et nous suivi
durant toute l'année en assurant le suivi scientifique et technique du
présent mémoire. Nous la remercions pour sa grande contribution
a` l'aboutissement de ce travail, et pour s'être montrée
disponible.
Nos remerciements vont aussi aux membre du jury pour l'honneur
qu'ils nous fait en acceptant de juger notre travail.
Nous remercions tous qui ont participéde prés ou de
loin a` l'élaboration de ce travail.

Auxquels Je dois Ce Que Je Suis
Que Dieu Vous Prot`ege
et Vous Prête Une Bonne Santéet Une Longue Vie
A MES FRERES ET SOEURS
Pour Les Encouragements Continus et L'aide Constant
A MON GRAND PERE et MA GRANDE MERE
A MES AMIS (ES)
A TOUS CEUX QUI M'ONT AIME'
Et Qui Ne Méritent Pas D'être Oubliés
J e dédie ce travail.
Abderrezak.

Auxquels Je dois Ce Que Je Suis
Que Dieu Vous Prot`ege
et Vous Prête Une Bonne Santéet Une Longue Vie
A MES FRERES
Pour Les Encouragements Continus et L'aide Constant
A MA GRANDE MERE
A MES AMIS (ES)
A TOUS CEUX QUI M'ONT AIME'
Et Qui Ne Méritent Pas D'être Oubliés
J e dédie ce travail.
Mourad.
Introduction Générale
La vision est le sens qui nous fournit le plus d'informations
sur le monde extérieur, elle nous permet de voir, de décrire, et
de reconnaàýtre les objets qui sont présent dans la
scéne.
L'être humain est capable de reconnaàýtre
les objets rapidement, avec une très grande précision, Cela est
réaliségràace au système visuel humain qui est
capable d'interpréter les informations sensorielles, c'est-à-dire
les informations fournies par l'environnement au système visuel a` un
instant donnée. L'interprétation est réalisée
gràace au cerveau, qui peut reconnaàýtre et situer les
objets, détecter le mouvement ...
Avec la naissance des machines de calcul, des recherches
scientifiques sont effectuées, en essayant de concevoir une machine qui
peut remplacer le système de vision humain, pour arriver a` des
résultats similaires a` la vision humaine.
La vision par ordinateur consiste a` reproduire les
résultats obtenus par la vision humaine sur un ordinateur en utilisant
des moyens informatiques en remplacant l'oeil par une caméra
et le cerveau par un ordinateur.
Un système informatique de vision par ordinateur
utilise en entrée une ou plusieurs images numériques acquises a`
l'aide de caméra ou d'appareil photo. Ces images subissent un ensemble
de traitements dans le but d'extraire le maximum d'informations relatives a` la
scène a` reconnaàýtre. Un système informatique de
vision par ordinateur utilise en entrée une ou plusieurs images
numériques acquises a` l'aide de caméra ou d'appareil photo. Ces
images subissent un ensemble de traitements dans le but d'extraire le maximum
d'informations relatives a` la scène a` reconnaàýtre.
Le but de notre projet est de contribuer a` la
résolution du problème de la reconnaissance d'objets.
L'idée de base est d'utiliser les caractéristiques discriminantes
de la forme d'un objet pour le reconnaitre. Cette caractéristique
correspond a` une partie de la forme du contour et la disribution des points
d'interets de l'objet qui sera la seule donnée utilisée pour
l'identifier. Pour ce faire, une base de données modèle est
utilisée pour effectuer
Intoduction G'en'erale
la reconnaissance d'un objet pr'esent sur l'image. Cette base de
donn'ees comporte une description de la partie caract'eristique des objets de
la base.
Pour cela notre memoire est organis'e comme suit :
· Chapitre I : Les méthodes de reconstruction 3D
Dans ce chapitre on a abord'e la notion de vision par ordinateur, les syst'eme
de vision par ordinateur et leurs classification. on a aussi introduit une
'etude sur la reconstruction 3D et quelques m'ethode de reconstruction 3D
· Chapitre II : La reconnaissance des objets
polyédrique Dans ce chapitre on a pr'esent'e une classification des
syst'eme de reconnaissance des objets et quelque m'ethode de reconnaissance des
objets 3D bas'e les histogrammes de couleurs et d'autres m'ethodes bas'ees sur
l'apparence
· Chapitre III : on a pr'esent'e la m'ethode utilis'e
pour la d'etermination de la carte de profondeur,afin de l'utiliser pour la
reconstruction 3D.Ainsi une description de l'algorithme utilis'e pour la
reconnaissance des objets poly'edrique.
· Chapitre IV : une description de l'envirennement dans
lequel l'application a 'et'e d'evelopp'e, et une description de
l'application.

Chapitre1
Les méthodes de reconstrution 3D
1.1 Introduction
La vision est un processus de traitement de l'information.
Elle utilise des stratégies bien définies afin d'atteindre ses
buts. L'entrée d'un système de vision est constituée par
une séquence d'images. Le système lui même apporte un
certain nombre de connaissances qui interviennent a` tous les niveaux. La
sortie est une description de l'entrée en termes d'objets et de
relations entre ces objets .
La vision par Ordinateur est a` la base de tout
système de vision artificielle. Un système de vision traite les
informations de bas niveau d'abstraction du flux vidéo et image pour en
extraire des informations de plus haut niveau d'abstraction : présence
d'entités, classe d'entités (document, chaise, mur) et plus
précisément l'identitéde l'entité. Dans ce
chapitre, on va donner quelque définition concernant la vision par
ordinateur et les systèmes de vision et la classification de ces
systèmes puis on parle de la reconstruction 3D en citant quelque
méthodes utilisépour reconstruire des objets 3D.
1.2 La vision par ordinateur
La vision par ordinateur (aussi appelée vision
artificielle ou plus récemment vision cognitive) constitue une des
branches de l'intelligence artificielle, c'est un domaine d'investigation et
d'applications nées a` la fin des années 50 dont les
premières bases théoriques ont étédéfinies
dans les années 60. Depuis, étant donnéle spectre
très large d'applications, très peu de problèmes ont
trouvédes solutions entièrement satisfaisantes. La recherche en
vision est divisée en plusieurs approches différentes, chacune
étudie des problèmes différents utilisant des techniques
différentes.
La vision par ordinateur 2D met l'accent sur les techniques
actuelles d'analyse d'image, d'apprentissage et de reconnaissance des formes.
La vision par ordinateur 3D approfondit quand a` elle les approches permettant
d'extraire d'une ou plusieurs images des informations tridimensionnelles
relatives a` la scene photographi'ee. Par exemples l'industrielle, militaires,
a'erospatiales, la t'el'ed'etection, la s'ecurit'e et m'edical [HOR 93].
La vision par ordinateur est la discipline qui cherche a`
reproduire la perception visuelle humaine sur un ordinateur. Le processus
d'acquisition d'images est effectu'e a` l'aide de cam'eras. Ces images seront
trait'ees afin de produire une description des 'el'ements qui composent la
scene 3D.
La figure 1.1 explique ce processus qui utilise un ensemble
d'images et des connaissances afin d'aboutir a` une description d'une scene.
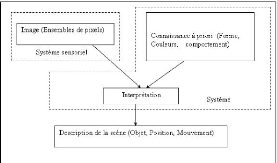
FIG. 1.1 - Sch'ema fonctionnel d'un systeme informatique pour la
vision artificielle.
1.3 description d'un systeme de vision par
ordinateur
1.3.1 Definition
Un systeme informatique de vision est un ensemble de
processus fortement li'es et compos'es de mat'eriels et de logiciels. A l'aide
de ces processus et des images prises de la scene, il fournit en sortie une
description symbolique puis s'emantique de la scene observ'ee. La description
est r'ealis'ee a` l'aide de l'identification des attributs de la scene et des
objets qui la composent.
Le systeme informatique recoit en entr'ee une
s'equence d'images qu'il traite en utilisant la connaissance sp'ecifique aux
diff'erents niveaux de traitements, en sortie il fournira une description en
termes d'objets et de relations entre ces derniers.
1.3.2 Classification des systemes de vision par
ordinateur
Selon la nature de la scène observ'ee on d'etermin'e le
type de système, on distingue deux type de système qui sont :
1.3.2.1 Les systèmes de vision bidimensionnelle
Ces systèmes permettent une acquisition de l'image de
la scène 2D, ils n'exploitent pas la notion de profondeur et donc
reconnaissent uniquement les objets plans et isol'es. Ces systèmes sont
utilis'es dans des domaines spatiaux tels que la t'el'ed'etection et la
reconnaissance de caractères, la robotique industrielle...
1.3.2.2 les systèmes de vision tridimensionnelle
Ces systèmes sont capables d'identifier les objets a`
partir d'une image d'un monde tridimensionnel, c'est pour cela qu'ils sont
utilis'es en robotique car ils permettent a` un robot de se d'eplacer dans un
environnement inconnu a` obstacles
1.4 La reconstruction 3D
La reconstruction tridimensionnelle d'un ensemble de points
informe sur la structure g'eom'etrique de ce même ensemble.
1.4.1 Les deffirentes approches de la reconstruction
tridemensionnelle
· Reconstruction projective
Quand les points sont d'efinis dans un repère
projectif. Une telle reconstruction ne contient donc pas d'information critique
(absence de la notion d'angle, de longueur, parall'elisme ... ).
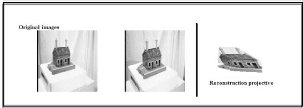
FIG. 1.2 - Une reconstruction projective a` droite
· Reconstruction affine
Quand les points sont définis dans un repère
affine. Une telle reconstruction contient des informations affines (rapport de
longueurs, parallélisme).
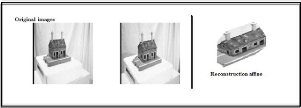
FIG. 1.3 - Une reconstruction affine a` droite
· Reconstruction euclidienne
Quand les points sont définis dans un repère
euclidien. Cette dernière reconstruction est la plus riche; elle
contient les informations que l'homme a l'habitude de manipuler. Nous parlerons
dans ce cas de reconstruction euclidienne, car le facteur d'échelle
absent ici ne pose pas de problème particulier.
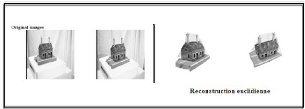
FIG. 1.4 - Une reconstruction euclidienne a` droite
1.5 Techniques de reconstruction 3D
Il existe de nombreuses techniques de reconstruction 3D, On
peut répertorier une grande partie des méthodes de reconstruction
dans ces quatre catégories :
· Reconstruction a` partir de la texture (Space carving
[KUT00]) : Cette méthode basée sur le calcul d'un critère
de photoconsistence nécessite d'avoir une lumière constante et
homogène tout autour de l'objet.
· Reconstruction a` partir de la géométrie
épipolaire[HAR00] : C'est la méthode la plus classique
étant donnéqu'on utilise déjàla
géométrie épipolaire pour initialiser l'asservissement
visuel et que l'on peut estimer les positions des caméras.
· Reconstruction a` partir des contours [BOY97], [LAU95]
: Baser la reconstruction 3D sur les contours de l'objet semble être
difficilement envisageable sur un objet naturel de forme quelconque avec des
contours très irréguliers.
· Reconstruction a` partir du mouvement de la caméra
(Factorisation de Tomasi et Kanade) [TRI96].
1.5.1 La vision stéréoscopique
1.5.1.1 Principe
La Vision Stéréoscopique vise a` reconstruire
la structure 3D d'une scène. Afin de réaliser cette
reconstruction il est nécessaire de connaitre les coordonnées 3D
de tous les points d'une scène. La scène est
représentée par un couple d'images stéréoscopique.
Ces images sont deux représentations de la scène prises sous des
angles différents. Chaque point de la scène est
projetédans les images de la paire stéréoscopique a` des
positions différentes. En vision stéréoscopique pour
disposer des coordonnées 3D d'un point il faut disposer des
coordonnées de ses deux projections, respectivement dans les images
gauches et droites. L'obtention des coordonnées de ces deux projections
d'un même point 3D est réalisée gràace a` une phase
d'appariement qui vise a` trouver, pour un point donnédans une image,son
point correspondant dans l'autre image. Ces deux points sont les projections
respectives du même point 3D dans les images droite et gauche.
Le principe de la vision stéréoscopique est
résumédans le schéma synoptique de la figure 1.5. Il est
a` noter qu'en amont des étapes de la figure 1.5 il est
nécessaire de réaliser la calibration du système
stéréoscopique de facon a` disposer des
paramètres intrinsèques et extrinsèques du système.
Ces paramètres seront essentiels dans les phases de rectification et de
calcul des positions 3D des points.
La stéréoscopie procède par appariement
puis une triangulation
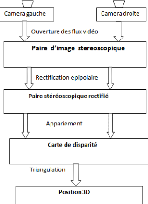
FIG. 1.5 - Synoptique g'en'eral de la vision st'er'eoscopique
.
1.5.1.2 L'appariement
Il consiste a` d'eterminer les projections qui se
correspondent dans deux images,c'est a` dire quels sont les points 2D
repr'esentant les projections d'un même point 3d. Un appariement est donc
un n-uplet de points 2D en correspondance
1.5.1.3 La triangulation
C'est une technique d'interpolation de surface, et
l'interpolation de surface est le passage du modèle volumique au
modèle surfacique. On peut classer la triangulation en deux cat'egories
qui sont
· Celle qui s'appuie sur une surface d'efinie
implicitement.
· Celle qui s'appuie sur un nuage de points repr'esentant
la surface de l'objet
1. La triangulation des surfaces implicites
1. L'algorithme des marching cube
Afin de repr'esenter un volume de donn'ees, on divise ce
volume en petits cubes, on fixe un seuil de densit'e par lequel va passer la
surface et, a` l'aide des points d'intersection entre les cubes et la surface
on polygonise cette dernière et on affiche le r'esultat a` l''ecran. La
première difficult'e sous-jacente a` cet algorithme est que, si l'on
traite tous les cas de façon s'epar'ee, on a 256 possibilit'es a`
traiter (il existe 256 façons qu'une surface courbe peut intersect'e les
arêtes d'un cube). Heureusement,
en mettant a` contribution la sym'etrie de rotation on peut
r'eduire ce nombre a 23 cas qu'il nous faut traiter s'epar'ement. Dans
l'article de Cline et Lorensen [LC87], on parle ici de 14 cas au lieu de 23 car
les sym'etries de r'eflexions sont aussi mises a` parti. Cependant,
après une 'etude approfondie de la question, il s'est av'er'e que si les
symetries de r'eflexion sont utilis'ees des trous ou des inconsistances seront
g'en'er'ees dans la surface. Ceci vient du fait que, dans certains cas, la
surface se trianguler de façon diff'erente si les sommets du cube qui
'etaient a` l'int'erieur de l'objet passent a` l'ext'erieur et vice-versa. Par
exemple si l'on regarde les figures 1.6 et 1.7 qui sont la sym'etrie l'une de
l'autre, on peut voir que la surface peut se trianguler de deux façons
diff'erentes (les points noirs repr'esentent les sommets du cube a`
l'int'erieur de l'objet).
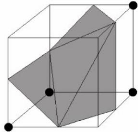
FIG. 1.6 - Une configuration possible d'un cube triangul'e.
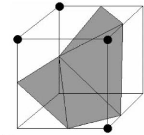
FIG. 1.7 La configuration miroir d'un cube triangul'e.
2. Triangulation a` partir d'un nuage de points
Construction d'un nuage de points pour chaque
voxel1 surfacique en estimant le point par lequel passe la
surface,la densit'e du voxel et la normal sont utilis'e pour estimer la
position de ce point.
1.5.2 Reconstruction a` partir de géométrie
epipolaire
Les principales 'etapes sont repr'esent'ees sur la Figure1.8
.L'extraction de points et l'appariement se font exactement comme pour
l'asservissement visuel, a` la diff'erence que l'on travaille sur une s'equence
d'images. L''etape de calibration de la paire st'er'eo doit se faire sur des
images prises sur le site sans changer les paramètres
intrinsèques et extrinsèques des cam'eras. Les paramètres
intrinsèques varient en fonction du changement de focale. On utilisera
une mire car l'autocalibrage est plus contraignant, n'ecessitant des mouvements
sp'ecifiques de la cam'era. On supposera que les paramètres
intrinsèques ne varient pas durant toute la phase d'acquisition des
images. Une première reconstruction projective est alors r'ealis'ee pour
initialiser la suite de la reconstruction, par une m'ethode d'ajustement de
faisceaux (Bundle Adjustment).
Ensuite un appariement dense des points appartenant a` la
structure est calcul'e a` partir de, paires d'images rectifi'ees (La
rectification des images est 'egalement utilis'ee pour l'appariement des points
servant a` l'asservissement des cam'eras. Enfin une carte de profondeur dense
est calcul'ee pour chaque point appari'e, puis les points 3D sont reli'es entre
eux par triangulation (Delaunay). Le plaquage de textures sur les surfaces
finit de donner un aspect photo-r'ealiste a` l'objet reconstruit.
Cette m'ethode de reconstruction doit être appliqu'ee
sur chaque sous-ensemble de s'equence d'images correspondant a` chaque position
du robot autour de l'objet, puis les diff'erentes parties reconstruites sont
alors assembl'ees. Il est courant de reconstruire a` partir de sous-ensembles
d'images puis de fusionner les modèles partiels ainsi obtenus par une
phase d'alignement 3D. Les algorithmes de reconstruction et d'alignement
s'appuient sur des correspondances de points ou de droites entre les images. La
localisation de ces points ou droites dans les images est affect'ee par un
bruit de mesure, influencant la qualit'e des modèles 3D
reconstruits.
'Des images 3D sont des images qui représentent une
sc`ene en trois dimensions. Le » pixel » est alors appeléun
voxel, et représente un volume élémentaire.
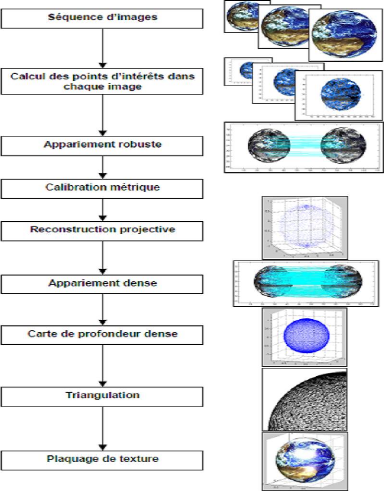
FIG. 1.8 Méthode de reconstruction.
1.5.3 Technique bas'e sur les ombrages ou Shape from shading
Comme son nom l'indique, il s'agit d'extraire une forme a`
partir des variations de lumières observées sur la surface d'un
objet [ZHA 99], [KOZ 98] au début elle était très peu
utilisée dans les systèmes de vision, une des raisons de cet
état de fait est l'absence d'algorithmes robustes capables de retrouver
les détails fins et discriminants des surfaces des objets (voir figure
1.9). Récemment des études de possibilitéd'utiliser le
shape from shading SFS dans la reconnaissance d'objets 3D sont faites [KOZ
98].
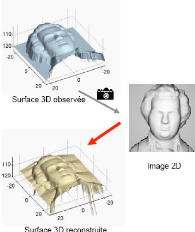
FIG. 1.9 - application de la SFS sur une image 2D.
1.5.4 Repr'esentation par d'etection de d'eformation de
formes
Cette approche décrit une nouvelle
représentation des formes déformables basées sur des
polygones triangulaires (voir figure 1.8), [BAR 98][Cou 2000][Blu 67]elle
cherche une structure de correspondance de calibre déformable, o`u on
veut trouver une transformation non rigide qui dresse la carte d'un
modèle a` une image. Le problème poséest la correspondance
de la forme a` l'image, ce dernier est défini en termes d'une fonction
d'énergie. Cette fonction d'énergie associe un coàut a`
chaque transformation potentielle du modèle. Typiquement la fonction
d'énergie est une somme de deux termes, le premier rapproche le
modèle déformé, des caractéristiques d'image,
tandis que le deuxième pénalise les grandes déformations
du modèle. La recherche sur des transformations est faite efficacement
en
exploitant les propriétés de cette
représentation pour les formes déformables. Cette approche donne
une solution optimale globale au problème de correspondance qui permet
de détecter des objets déformables sans aucune sorte d'occlusion
et le désordre de fond.

FIG. 1.10 - polygones triangulaires d'un lapin et d'une
poire.
1.5.5 Méthodes basées sur l'extraction de
squelette
La représentation des formes en squelette est
introduite par Blum [Bub 98]. Elle a la possibilitéde conserver sous
forme compacte un grand nombre d'informations topologiques et
géométriques de la forme initiale. Un autre avantage qu'il faut
signaler est le fait que les squelettes ont une structure de graphe (voire
figure 1.9) qui permet d'utiliser les puissants outils issus de la
théorie des graphes. Le squelette d'un objet est une
représentation de la forme dans une dimension inférieure. Pour un
objet surfacique (2D), le squelette est un ensemble de lignes centrées
dans la forme, par contre pour les objets 3D il existe deux types de
squelettes. Les squelettes surfaciques qui sont un ensemble de surfaces
centrées dans la forme et les squelettes curvilignes 3D qui sont un
ensemble de lignes centrées dans la forme.

FIG. 1.11 - Squelettes topologiques de quelques objets.
1.5.6 La reconstruction par des jonctions
caractéristiques
Cette méthode est proposée par R.BERGEVIN et
A.BUBEL [Het 95]. Elle est basée sur l'extraction des branches de
jonction d'objets tridimensionnels aux points d'intérêt dans une
image 2D en utilisant un processus de regroupement topologique (Figure1.12).
Pour la reconstruction des objets 2D, avec cette
méthode il faut construire un graphe, o`u les noeuds sont les points de
jonctions, les arcs sont les contours participant a` la jonction, en suite ce
graphe est exploitépour extraire la structure des contours composant
l'objet .Le principe de cette méthode est de subdiviser l'image en
petites fenêtres pour faciliter l'extraction des jonctions possible.
Chaque fenêtre est analysée en la binarisant, puis on extrait les
branches en appliquant des opérateurs qui mettent en évidence les
lignes de
direction prédominantes [ZHO 96]. A la fin, l'ensemble
des branches extraites est organiséen graphe et les positions de
jonction extraite sont structurellement validées puis
raffinés.
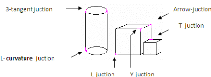
FIG. 1.12 - Type de jonction
1.5.7 Shape From Motion : Reconstruction a` partir du
mouvement
L'analyse du mouvement et l'interprétation visuelle
d'une sc`ene sont extrêmement liés. En particulier, le mouvement
du capteur autour d'un objet peut permettre a` l'observateur de mieux
comprendre la forme et la structure de l'objet. En
réalitél'origine du mouvement revient a` trois fqcteurs facteurs
:
· Le mouvement de l'observateur en respectant la sc`ene
(Déplacement de la caméra dans le cas de la
stéréoscopie)
· Ou le mouvement des objets dans la sc`ene
· La camera et l'objet de la sc`ene se deplacent Le domaine
de suivi de mouvement se divise en deux taches principales :
· Détection de mouvement : consiste a` trouver les
objets en mouvement dans la sc`ene par l'utilisation des séquences
d'images captées a` des moments différents.
· Estimation de mouvement : consiste a` estimer le
déplacement de certaines primitives de l'image.
Différentes approches (approche de flot optique,
approches de mise en correspon-
dance; sont utilisées pour la
détermination de mouvement et la structure tridimen-
sionnelle de l'objet. Cette dernière, consiste a`
trouver les coordonnées 3D d'un points P a` partir d'une séquence
d'images. En déplacant une caméra autour d'un objet,
on peut construire sa structure tridimensionnelle.
1.5.7.1 L'approche basée sur la mise en correspondance
Cette approche utilise les techniques de l'appariement des
indices pour l'estimation du mouvement et le suivi d'objets, ces primitives
sont généralement des coins, des segments [Mar 01]. La suite des
positions de ces indices visuels dans plusieurs images permet, si l'on utilise
suffisamment d'indices appartenant au même objet d'obtenir le mouvement
3D de celui ci. Le principe consiste en un système a` huit
équation de la forme
E = T × R
tel que T est une translation et R est une rotation,
connaissant huit points de l'objet, la décomposition de E en valeurs
singulières permet de retrouver les paramètres du mouvement et la
structure 3D. L'estimation du mouvement a` partir des droites donne de
meilleurs résultats que ceux donnés par des points
caractéristiques.
1.5.7.2 L'approche du flot optique
L'utilisation de cette méthode consiste a` extraire
l'information de la vitesse a` partir d'une séquence d'images avec
l'hypothèse que l'intensitédes pixels des objets est
conservée au cours du déplacement. Le calcule du flux optique
consiste a` extraire un champ de vitesses a` partir d'une séquence des
images en supposant que l'intensité(ou la couleur) est conservéau
cours du déplacement. Sous cette hypothèse, on peut
établir une relation entre la vitesse apparente v (déplacement
dans l'image d'indices visuels tels que des régions
délimitées par des contours supposéreprésenter la
projection du mouvement 3D des objets de la scène et /ou du mouvement de
la caméra) et les variations spatio-temporelles de
l'intensité.
Le principe de cette technique est résumédans les
quatre étapes suivantes :
1. La caméra prend plusieurs images de la
scène.
2. Détection de mouvement (approche de flot optique, mise
en correspondance).
3. Estimation de mouvement (angles de rotation, matrice
fondamentale, vecteurs de translation. . .etc.)
4. Estimation de la carte de profondeur .
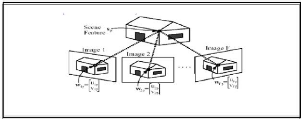
FIG. 1.13 - Processus de reconstruction 3D a` partir d'un
mouvement
5. Reconstruire le modèle 3D d'après la carte de
profondeur calculée.
1.5.8 Méthode par space carving (creusage d'un volume
3D)

FIG. 1.14 - Méthode par space de l'objet
· Algorithme Algorithme de space carving [PMJ2009])
1. Initialiser un volume englobant fait de N x M x P voxels
2. Choisir un voxel sur la surface courante
3. Projeter ce voxel sur les caméras sur lesquelles il
est visible
4. 'Eliminer (ou << creuser >>) si non
photo-cohérent
5. Répéter 2-3-4 jusqu'`a convergence
1.6 Conclusion
Dans le présent chapitre on a abordéla notion de
la vision par ordinateur et la définition correspondante au
système de vision par ordinateur et la classification de ces
systèmes selon un critère de profondeur.
On a aussi introduit un aperçu sur quelque méthode
de reconstruction 3D en montrant leurs définitions et leurs
principes.

Chapitre2
La reconnaissance des objets 3D
2.1 Introduction
La reconnaissance d'objets tridimensionnels est un
problème qui ne cesse pas de d'efier la communaut'e de vision par
ordinateur. La preuve de l'existence de la solution (le système de
vision humain), motive les chercheurs dans ce domaine. Ce problème peut
être d'efini par la reconnaissance des objets pr'emod'elis'es dans une
base de donn'ees a` partir des donn'ees acquises de la scène. La
reconnaissance signifie l'identification et la localisation des objets
pr'esents dans la scène. Un système de vision
»intelligent» doit être capable de reconnaàýtre
les objets existants dans son environnement (identification) et les situer
(localisation). La majorit'e des systèmes de reconnaissance d'objets
actuels tente de r'esoudre ce problème, en se basant sur un
modèle (les objets sont connus a` priori). La plupart de ces
systèmes travaillent sur des objets dits rigides (non d'eformables) ou
articul'es. Un Système de Reconnaissance d'Objets (SRO) complet comprend
diff'erents modules : calibration de capteurs, mod'elisation 3D, traitement
d'images de la scène et la reconnaissance proprement dite. Selon le type
de capteurs utilis'e, la reconnaissance d'objets 3D peut être trait'ee en
3D/3D (capteurs t'el'em'etriques, st'er'eoscopiques ou s'equences d'images) ou
en 2D/3D bas'ee sur une seule image de luminance. L'approche t'el'em'etrique
pose des problèmes de mise en oeuvre, de limite de port'ee et de
lenteur. L'approche a` plusieurs images (st'er'eo ou s'equences) possède
des difficult'es d'appariement entre les diff'erentes images d'entr'ee. Une
seule image d'entr'ee ne fournit pas d'informations 3D (profondeur), elle donne
lieu a` un grand nombre d'hypothèses sur la reconnaissance. Peu de
Systèmes de Reconnaissance d'Objets utilise la dernière
approche.
2.2 Classification des syst'em de reconnaissance des
objets polyedrique
De nombreuses approches au problème de la
reconnaissance d'objets 3D ont 'et'e d'evelopp'ees dans la litt'erature. Elles
peuvent être classifi'ees selon les m'ethodes et techniques mises en
oeuvre :
· Acquisition et repr'esentation informatique du
modèle 3D.
· Approche utilis'ee pour l'appariement.
2.2.1 Acquisition et Repr'esentation Informatique du
modèle 3D
Les m'ethodes les plus connues pour l'acquisition du
modèle 3D sont la CAO, les capteurs actifs (t'el'emètres laser)
et les capteurs passifs (cam'era unique, st'er'eo ou plus). Elles impliquent
des m'ethodes de repr'esentation de donn'ees adapt'ees.
1. Méthodes basées sur La CAO
L'approche Conception Assist'ee par Ordinateur (CAO) est la
plus dominante car elle d'ecrit un modèle 3D sans erreur de capture;
elle est applicable aux environnements industriels. En revanche, elle
possède des inconv'enients majeurs :
· L'implication d'un op'erateur humain lors de la
mod'elisation de la scène.
· La difficult'e d'application pour des objets naturels.
Plusieurs types de repr'esentation du modèle 3D adapt'es
a` la CAO existent
· volumique, la g'eom'etrie constructive des solides
consiste en la repr'esentation de l'objet a` mod'eliser en diff'erents
'el'ements simples qui s'appellent primitives et a` les lier par des
op'erateurs ensemblistes (union, intersection, etc.)
· Surfacique, la repr'esentation par les bords (BREP :
Boundary REPresentation) permet de construire un modèle
face/arête/sommet.[SHA99]
2. Méthodes basées sur des mesures capteurs
La m'ethode des capteurs t'el'em'etriques est plus facile a`
employer mais elle introduit des mesures impr'ecises et incertaines dans la
phase de reconnaissance. Il faudra toujours r'epondre a` certaines questions
lors de l'acquisition telles que : »combien de vues fautil pour couvrir
toutes les informations n'ecessaires ?» ou»comment faut-il segmenter
les images pour obtenir les descriptions surfaciques ou volumiques de l'objet
?». Ce sont des questions auxquelles il est difficile de r'epondre et qui
constituent des problèmes ouverts en recherche. Les m'ethodes
d'acquisition des modèles 3D en utilisant des capteurs photom'etriques
(une seule cam'era statique ou en mouvement, avec ou sans mod'elisation des
sources lumineuses, deux cam'eras ou plus), sont les plus difficiles a` mettre
en oeuvre. En
effet, elles posent les mêmes problèmes que les
m'ethodes appliqu'ees aux capteurs actifs en sus du problème de la
projection perspective et de la perspective inverse. Plusieurs techniques ont
'et'e utilis'ees pour calculer la position 3D (techniques st'er'eos, s'equences
d'images, etc.) Ces m'ethodes sont rarement employ'ees pour l'acquisition des
modèles 3D dans les SRO. Mais, elles sont prometteuses car moins
on'ereuses, plus g'en'erales et adapt'ees a` de nombreux environnements. La
repr'esentation des scènes r'ef'erenc'ee capteurs peut se d'ecomposer en
deux types selon ceux-ci (actifs ou passifs). Le problème d'ecisif de la
repr'esentation est la segmentation des donn'ees en primitives fiables pour la
reconnaissance. Or, le processus de segmentation est d'etermin'e par le type de
repr'esentation utilis'e. En g'en'erales repr'esentations 3D sont surfaciques
ou volumiques.
La capture passive des scènes est la plus proche du
système de vision humaine. L'utilisation des images de niveaux de gris
introduit elle aussi le problème de segmentation. Les deux principales
m'ethodes utilis'ees a` ce niveau sont l'approche contour et l'approche
r'egion. Il existe d'ailleurs des systèmes qui m'elangent les deux
approches.
2.2.2 Principales approches d'appariement
L'appariement ou la mise en correspondance entre la
scène et son modèle 3D est le point crucial d'un SRO. L'approche
de l'appariement utilis'ee dans un SRO marque souvent ses performances. Nous
pr'esentons ci-dessous un aperçu de la complexit'e algorithmique de ce
problème, puis les principales approches de r'esolution.[SHA99]
Complexitéde l'appariement
soit :
O : l'ensemble des caract'eristiques d'un objet (sommets et/ou
arêtes et/ou faces ...) D : l'ensemble des caract'eristiques des donn'ees
de son image
n : le nombre des caract'eristiques de l'objet
m : le nombre des caract'eristiques des donn'ees de son image
l min (n, m); m >= n car il y a souvent plusieurs objets
dans la scène, dont le modèle 3D n'est pas connu. Une solution
optimale peut être trouv'ee en cherchant tous les appariements possibles.
Du fait d'occlusions et de caract'eristiques du capteur utilis'e, il faut
comparer un sous-ensemble (de taille i) de D et de O [HORAUD 1993]. Le nombre
de possibilit'es d'appariement entre O et D est :
N=
|
X j
i=k
|
cn i .cm i .i! =
|
X j
i=k
|
n!
(n - 1)!.i! ×
|
m!
|
= m!.n!.
|
X j
i=k
|
1
|
|
|
|
k repr'esente le nombre d'appariement minimal pour trouver une
transformation objet/capteur. N s'accroàýt rapidement en fonction
du nombre d'objets dans la base.
Exemple Soit un objet contenant 18 sommets, l'extraction de ces
sommets dans une image 2D fournit 11 points. Le nombre de possibilit'es
d'appariement
c11
i .c18
i .i! = 4.34 × 1034
1 1
N= X
i=3
Pour trouver une solution optimale, il faut v'erifier toutes ces
possibilit'es.
solution
Deux techniques d'appariement pr'edominent :
· l'approche graphe.
· l'approche hachage g'eom'etrique (indexation
g'eom'etrique).
L'approche bas'ee sur les règles d''evidences peut
compl'eter les deux approches pr'ec'edentes
1. Travaux basés sur l'approche graphe
Dans l'approche graphe, les noeuds repr'esentent les
primitives de l'objet et les arêtes repr'esentent les relations entre
elles. Le problème se ramène donc a` un problème
d'isomorphisme, puisque la scène est en g'en'eral un sous graphe du
graphe de l'objet. Malheureusement ce problème NP-complet1
est très difficile a` r'esoudre et devient insoluble quand le nombre de
modèles dans la base est important. Les essais pou r'eduire la taille du
graphe utilis'e pour l'appariement ont conduit a` des diff'erentes
techniques.
Ayache et Faugeras [AYA 86] ont propos'e l'utilisation d'un
triplet de segments ayant un sommet commun. Cette technique permet de r'eduire
consid'erablement le nombre d'appariements possibles. Lowe [LOW 87] a propos'e
l'am'elioration du traitement d'images. Il a 'etabli des critères de
regroupement des indices 2D afin d'obtenir des primitives consistantes qui
facilitent l'appariement. Par ailleurs, un degr'e de probabilit'e est attribu'e
a` une hypothèse d'appariement afin de r'eduire l'espace des solutions
et enfin, une reconstruction 3D est effectu'ee pour v'erifier les
hypothèses d'appariement.
Pampagnin et Devy [PAMP91] ont introduit le Graphe de
Compatibilit'e qui regroupe dans ses noeuds toutes les hypothèses
d'appariement entre une chaàýne de segments 2D et une face d'un
aspect du modèle 3D dont les arcs repr'esentent les compatibilit'es
entre hypothèses d'appariement. L'utilisation du Graphe d'Aspects permet
de limiter la taille du graphe de compatibilit'e.
2. Travaux basés sur l'approche du hachage
géométrique
Lamdan et Wolfson [LAM 1988] ont introduit le Hachage
G'eom'etrique (HG). Il
consiste en la cr'eation hors ligne d'une table de
hachage (TabH) et une reconnais-
sance en ligne. La table de hachage
contient les diff'erents aspects des objets du
'Ensemble des problèmes pouvant être résolus
par des algorithmes Non déterministes en temps Polynomial. Complet :
veut dire qu'il n'existe pas un algorithme P efficace pour le résoudre
[SED 90].
modèle 3D, exprim'es dans des bases diff'erentes (une
base peut être repr'esent'ee par 2, 3 points ou arêtes) [WOLFSON
1992]. Cette expression est bas'ee sur des invariants ou des quasi invariants
g'eom'etriques [BIN 1993] et [GROS 1995]. Pour chaque entr'ee dans cette table,
il y a une liste des modèles susceptibles de satisfaire l'appariement.
La reconnaissance en ligne est obtenue par mise en correspondance de points 2D,
exprim'es a` leur tour dans diff'erentes bases, avec le contenu de la table de
hachage. Cette approche a l'avantage de r'eduire l'espace de recherche des
modèles possibles, sp'ecialement dans les grandes bases de donn'ees
(problème d'indexage). Son d'efaut est l'augmentation rapide de la
taille de la table de hachage en fonction du nombre de modèles.
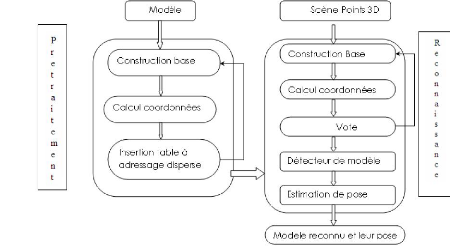
2.1.l'algorithme d'indexation géométrique
L'algorithme d'indexation g'eom'etrique est sch'ematis'e a` la
figure 2.1 . Il se divise en deux phases, une phase de pr'etraitement
(hors-ligne) et une phase de reconnaissance (en-ligne). Cette subdivision
permet de r'eduire le temps de r'eponse a` l'usager, en effectuant une seule
fois le pr'etraitement sur la banque de modèles, avant d'appliquer la
reconnaissance sur plusieurs scènes diff'erentes. [BUS2001]
1.
FIG. 2.1 - Sch'ema de l'algorithme d'indexation
g'eom'etrique
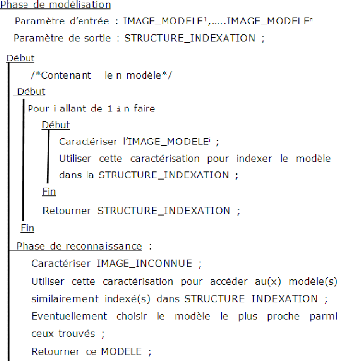
Prétraitement La phase de prétraitement consiste
en trois étapes, qui sont répétées pour chacun des
modèles reçus en entrée. Tout d'abord, une base est
construite avec trois points du modèle. Ensuite, les coordonnées
de chaque autre point du modèle sont calculées dans cette base.
Finalement, ces coordonnées sont insérées dans une table
a` adressage dispersé(hash table), avec quelques autres informations
pertinentes (le modèle, la base et le point). Ces étapes sont
répétées pour toutes les bases possibles dans le
modèle. Il y a donc de la redondance dans le traitement, mais ceci est
fait pour permettre la reconnaissance même si un des points d'une base
n'est pas présent (ou est trop bruité) dans la scène.
C'est ce qui fait que l'indexation géométrique est robuste aux
occultations, c'est a` dire les cas o`u certains objets ne sont que
partiellement visibles dans la scène.
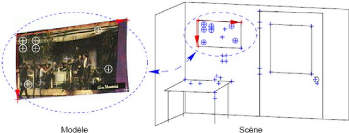
FIG. 2.2 - Exemple de cas o`u un modèle est
présent dans la scène. Les coordonnées d'un sous-ensemble
des points du modèle sont les mêmes que celles d'un sous ensemble
des points de la scène.
C'est le fait de calculer les coordonnées des points du
modèle dans une base formée elle aussi de points du
modèle, qui fait en sorte que l'indexation géométrique
permet de reconnaàýtre un modèle peu importe sa pose dans
une scène 3D. En effet, lorsqu'un modèle est présent dans
une scène, il y a une transformation qui amène un sous-ensemble
de points du modèle vers un sous-ensemble de points de la scène.
Comme les coordonnées de ces points du modèle coincideront avec
celles des points correspondants de la scène, l'algorithme
détectera ce modèle. La figure 2.2 en montre un exemple. Le
modèle est un poster et, dans la scène, ce poster est
accrochésur le mur, au dessus de la table. Les coordonnées qui
coincident sont encerclées. [BUS2001] En bref, le but du
prétraitement est d'extraire des informations utiles concernant les
modèles et de les emmagasiner de façon rapidement accessible. La
reconnaissance consiste a` extraire des informations similaires dans la
scène et a` chercher si elles sont présentes dans les
modèles. Essentiellement, les informations utilisées sont des
descriptions g'eom'etriques des modèles, invariantes a`
leur position et orientation dans l'espace. Ceci gràace a` la formation
de r'ef'erentiels de coordonn'ees (ou bases) a` partir de points de chaque
modèle, dans lesquels le reste du modèle est repr'esent'e.
L'indexation g'eom'etrique est une approche de reconnaissance d'objets robuste
aux occultations, c'est-à-dire les cas o`u certains modèles
pr'esents dans la scène ne sont que partiellement visibles. Elle permet
d'effectuer la reconnaissance simultan'ee de plusieurs objets dans une banque
de modèles efficacement, sans besoin de traiter chacun ind'ependamment.
Aussi, il est possible de choisir le type de transformation qui nous int'eresse
entre un modèle et son instance dans la scène, que ce soit par
exemple des transformations rigides, similaires ou affines.
Reconnaissance La phase de reconnaissance d'ebute de la
même façon que la phase de pr'etraitement. Une base est construite
avec trois points de la scène, puis les coordonn'ees de chaque autre
point de la scène sont calcul'ees dans cette base. Pour chacune de ces
coordonn'ees, un vote est effectu'e. Le vote se fait de la façon
suivante. Premièrement, on cherche dans la table a` adressage dispers'e
les bases de modèle qui, au pr'etraitement, ont donn'e des coordonn'ees
approximativement 'egales a` celles du point de la scène.
Deuxièmement, l'ensemble des points ayant servir a` construire la base
du modèle est compar'e a` l'ensemble des points ayant servi a`
construire la base dans la scène pour valider la correspondance des
bases. Si c'est le cas, un vote est ajout'e pour cette paire de bases. Dans
l'algorithme original, le vote est toujours unitaire, mais on peut aussi
utiliser un vote pond'er'e ayant un poids variable entre 0 et 1, selon la
distance entre les coordonn'ees. Une fois le vote compl'et'e, une nouvelle base
est choisie dans la scène et les 'etapes pr'ec'edentes de la phase de
reconnaissance sont r'ep'et'ees jusqu'àce que toutes les combinaisons de
trois points de la scène aient 'et'e parcourues (en r'ealit'e, il n'est
pas n'ecessaire de traiter chacune des bases. Si une certaine paire de bases a
obtenu un grand nombre de votes, un modèle est d'etect'e dans la
scène. Les points de ce modèle sont retir'es de la scène,
ainsi d'autres modèles pourront être reconnus en r'ep'etant la
phase de reconnaissance (nous verrons que ceci peut être fait d'une
façon plus efficace). Finalement, la position des modèles
reconnus dans la scène est d'etermin'ee par une estimation de pose.
[BUS2001]
Le processus d'indexation Le processus d'indexation analyse
une image et essaye de trouver quels objets y sont pr'esents dans la
scène. L'impl'ementation actuelle permet l'analyse des images contenants
un ou plusieurs objets a` la fois.
. Prend une image, elle peut contenir plus d'un objet
· Essaye de réduire au mieux le bruit contenu dans
l'image
· Divise le graphe-image en composantes connexes de
facon que chaque composante provienne au mieux possible d'un objet
identique. Pour chacun de ces graphes le même processus d'indexation.
:
(a) Extrait respectivement les figures fondamentaux et les
intersections.
(b) Calcul le code de hachage pour chaque graphe et chaque
intersection. Celui-ci est obtenu de la même facon que pour le
processus de la base de données.
(c) Fournit la liste de modèle respectif en indexant dans
la base de modèle.
Les modèles qui ont recus le plus de votes
sont sélectionnés comme les candidats les plus proches de l'objet
en question La même procédure est répétée
pour le reste des composants connexes (objets) dans l'image [SOS92]
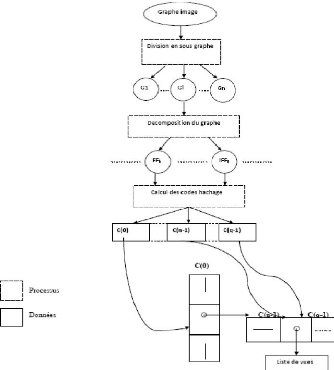
FIG. 2.3 - schéma processus du d'indexation
2.3 La reconnaissance par apparence
Dans la suite on va définir ce que nous entendons par
reconnaissance par apparence, on va fournir une classification de principales
méthodes existantes en exposant leurs avantages et leurs
inconvénients
2.3.1 définition et caractérisation
La reconnaissance par apparence, toute méthode de
reconnaissance qui cherche a` modéliser des objets (2D ou 3D)
directement par leur image percue et non pas par un modèle
construit a` partir d'une conception abstraite particulière. Le facteur
commun a` toutes les méthodes qui entrent dans la catégorie
» par l'apparence » est qu'elles modélisent des objets 3D par
un ensemble d'image prises dans des conditions particulières. Ces
conditions sont liées aux contraintes de reconnaissance qui sont
imposées au problème que le système censéa`
résoudre. Les conditions qui sont généralement
considérées sont la plupart du temps liées aux changements
d'éclairage ou au déplacement de l'objet dans l'image. Dans la
majoritédes applications qui implémentent cette approche, elle
est couplée a` une indexation, bien que ceci ne soit pas une condition
obligatoire. Dans ce cas, la structure globale des algorithmes se
présente comme montrée dans l'algorithme suivant : [LAM 98]
alogorithme1 : squelette d'une reconnaissance par l'apparence
s'aidant d'une indexation.

Lors de la phase de reconnaissance, il n'est pas toujours
necessaire que l'image pr'esent'ee soit une copie conforme d'un des
modèles index'es. De facon g'en'eral, on distingue deux
grands classes dans les m'ethodes de reconnaissance par l'apparence. L'une
regroupe les approches qui considèrent une image comme une entit'e
indivisible, donnant g'en'eralement lieu a` un index unique pour image. L'autre
qui mod'elisent les objets par un ensemble de caract'eristique
h'et'erogènes d'esignant des parties plus ou moins grandes dans l'image,
on parlera de m'ethodes globales pour les unes, locales pour les autres.
2.3.2 Modelisation globale
Les mod'elisations globales sont principalement centr'ees autour
d'une même approche, la m'ethode ne considère plus les images
comme des matrices n x m de valeurs de niveau de
gris, mais comme des vecteurs de taille nm contenant ces
mêmes valeurs. Ainsi, couvrant l'espace des apparences possibles d'un
objet par Ó images modèles, il est possible de calculer une
matrice de covariance de dimension nm x nm qui capte la variation entre les
diff'erents modèles. La matrice est obtenue en calculant la moyenne M
des vecteurs modèles Mi=l..k et en posant :
Ó= Xk (Mi - M)(Mi - M)k
i=1
Les vecteurs propres de cette matrice forment alors une base
dans laquelle il est possible d'exprimer l'espace d'efini par les
modèles. La base optimale en d dimensions, au sens des moindres carr'es,
est obtenue en prenant les vecteurs propres ayant les d plus grandes valeurs
propres, ce qui permet de faire une r'eduction consid'erable de la dimension de
l'espace sans perte de qualit'e visuelle (d est nettement inf'erieur a` k), car
cette d'ecomposition est en fait une analyse en composantes principales. Une
image est donc repr'esent'ee comme un point dans l'espace de ces vecteurs
propres, et la reconnaissance revient a` faire une recherche du plus proche
voisin dans l'espace a` d dimensions consid'er'ees. [LAM 98]
L'avantage principal de cette approche est sa r'eduction
consid'erable des dimensions pour la repr'esentation d'une image. Dans le cas
d'une image 512 x 512 (vecteur de dimension 5122 = 2293620, on prend
typiquement les 10 plus grandes valeurs propres, ce qui revient a` une
r'eduction de dimension d'un facteur d'ordre 104. Ceci permet de
r'ealiser des indexations efficaces et des recherches rapides, Malheureusement
ses inconv'enients sont de taille :
· Le fait que l'approche soit globale la rend
particulièrement sensible a` des occultations.
· Les changements d''eclairage, ou des transformations
g'eom'etriques lors de la prise de vue influent directement sur la
repr'esentation finale de l'image.
2.3.3 Modélisation locale
La classe des approches par mod'elisation locale est
très h'et'eroclite. On admet g'en'eralement que son origine se trouve
dans la m'ethode de reconnaissance Geometrie hashing. Dans cette approche, le
modèle n'est plus l'image toute entière, comme dans la section
pr'ec'edente. Par contre, un modèle est repr'esent'e par un ensemble
fini de configurations locales dans l'image. Ces configurations sont
g'en'eralement s'electionn'ees suivant un critère de pertinence, et
imposent donc une segmentation sur les images. Dans le cas de points, il
pourrait s'agir de minima d'autocorr'elation, par exemple, et dans le cas de
contours ce pourraient être des maxima locaux de la norme du gradient. Le
but principal des m'ethodes
locales est de mettre en correspondance des configurations
d'une image inconnue avec des configurations de modèles
déjàobservés. Le taux de mise en correspondance et la
cohérence géométrique entre celles-ci sont alors des
mesures permettant de classer les modèles et de sélectionner
celui qui est le plus ressemblant a` l'image requête. Les méthodes
diffèrent principalement dans leur façon de caractériser
les configurations et dans leur manière de trier les modèles
plausibles. Elles ont ceci en commun avec les approches
géométriques qu'il s'agit intrinsèquement de trouver un
sous-ensemble optimal d'appariement. Elles en diffèrent par le fait
qu'il n'existe a priori pas de structuration entre les configurations. La
comparaison s'arrête là, par contre. Afin
d'accélérer cette mise en correspondance, les méthodes
caractérisent les configurations par des descripteurs. Ces descripteurs
sont choisis afin d'absorber une partie des déformations qui peuvent
apparaàýtre lorsque l'objet est observédans des conditions
différentes.
2.4 Conclusion
Beaucoup de problèmes dans la reconnaissance d'objets
n'ont pas étérésolus et les systèmes actuels
montrent leurs limites. Chaque SRO se concentre sur quelques aspects du
problème en supposant que les autres aspects sont résolus ou le
seront dans le futur. Apres la définition de la reconnaissance d'objets,
on a vu des critères de classification des systèmes de
reconnaissance des objets (SRO). Ils sons basés sur les méthodes
employés pour acquisition, la représentation modèle 3d et
l'appariement entre celui-ci avec les données capteur. On a aussi
présentéquelque méthode de reconnaissance des objets, en
montrant leurs principes, leurs avantages et leurs inconvénients. On a
décrit ce qu'on appelle l'indexation géométrique ainsi
l'algorithme d'indexation géométrique, on a
présentéune méthode de reconnaissance base sur les
histogrammes de couleurs et une autre basée sur l'appariement en
montrant leurs acquis et leurs échecs

Chapitre3
La conception et resultat d'expérimentation
3.1 Introduction
L'extraction de l'information concernant la structure des
formes presentées dans une image est un problème très
délicat dans le domaine de la vision par ordinateur. Bien qu'il ait
étéétudiédepuis longtemps, il n'y a pas de
méthode qui soit en même temps robuste, rapide et
générale.
3.2 La reconnaissance des objets
polyédrique
3.2.1 Choix des primitives
· Les segments 3d fournissent une représentation
simplifiée pour la scène.
· Un objet polyédrique est un ensemble de segments
3D.
· Les segments facilitent la détection des
jonctions.
La méthode de la reconnaissance qu'on a
développésuit les étapes représentées par
l'organigramme suivant :
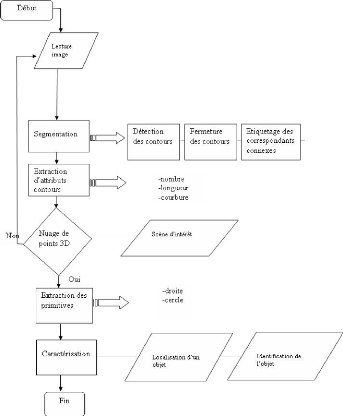
FIG. 3.1 - Organigramme de la méthode de reconnaissance
automatique des objets.
3.2.2 L'algorithme développépour la reconnaissance
des objets polyédrique
3.2.3 algorithme pour la localisation
1. Prendre une séquence d'images
2. 'Etablire un appariement (Suivi de segment de droite).
3. Déterminer le mouvement
4. D'eterminer les coordonn'ees X, Y, Z.
5. Reconstruction carte de profondeur(Reconstruction
projective).
6. D'eterminer :
(a) Les segments 3D.
(b) D'eterminer les jonctions
(c) Calculer les angles
(d) Reconnaàýtre la forme pr'esente dans la
scène
· D'eterminer les jonctions
3.2.3.1 Estimation des primitives
(a) Intersection segment / segment Soient 2 segments 3D [A1A2]
et [B1B2].
Trouver l'intersection I de ces 2 segments en fonction de
A1,A2,B1,B2.

Solution :
Toujours sous forme param'etrique :
I est sur [B1B2] il s'exprime donc en param'etrique par
I = B + tB (B2 - B1)
I est aussi sur [A1A2] donc : I = A + tA (A2 - A1) Notez que
le paramètre t est diff'erent sur chaque segment. Dans le cas g'en'eral,
tA tB . On pose les vecteurs
VA = A2 - A1 et VB = B2 - B1
En remplaçant ceci dans les 2 'equations pr'ec'edentes, on
obtient : I = A + tA VB = B +tA VB
On a donc une 'equation a` 2 inconnues tA et tB . En projetant
cette 'equation sur l'axe X et sur l'axe Y,et sur Z on obtient un
système lin'eaires de 3 'equations a` 2 inconnues :
A1.x + tAVA.x = B1.x + tBVB.x A1.y + tAVA.y = B1.y
+ tBVB.y A1.z + tAVA.z = B1.z + tBVB.z
Soit :
tAVA.x - tBVB.x = B1.x - A.x tAVA.y - tBVB.y =
B1.y - A.y tAVA.z - tBVB.z = B1.z - A.z
Ou sous forme matricielle, en posant le vecteur T = tA,tB,0
le vecteur R = B -A Et la matrice 3x3
M= ~~~~~~~~
~~~~~~~~
VA.x VB.x 0
VA.y VB.y 0
VA.z VB.z 1
On obtient le système lineaire matriciel suivant :
MT = R
Si le determinant 3x3 de M est non nul, l'equation a une unique
solution qui se trouve en inversant la matrice M, l'inverse de M etant
noteM-1 On a :
T = M-1R
Remarque : seule la connaissance d'une des 2 valeurs TA ou TB
nous suffit pour trouver l'intersection I.
En notant ' det ' le determinant de 2 vecteurs 3D. Nous obtenons
donc pour tA par exemple :
tA = det((B - A),vB)/det(vA,vB)
(b) Calculer les angles on peut utiliser le produit scalaire. En
utilisant les definitions suivantes :
AB : vecteur de A a` B
- AC : vecteur de A a` C
|| : norme des vecteur (longueur (positif))
BAC : angle entre le sommet A et les points B et C
- Le produit scalaire . S'écrit de la manière
suivante :
AB . AC = |AB|×|AC|×cos (BAC)
Et donc on peux récupérer l'angle
Angle = arccos ( prodscalaire(AB,AC) /norme( AB) . norme(AC))
- Reconnaàýtre la forme présente dans la
scène
On regroupe les segments en quatre, pour chaque jonction on
calcule
l'angle Si les angles sont équivaux est prés de
90°on détecte un polyèdre
Conclusion
IL faudra d'abord calculer la carte de profondeur, pour cela on
va utiliser l'algorithme de développement de la section suivante [NAB
09]
3.3 Calcul de la carte de profondeur
3.3.1 Modèle géométrique de
système de vision [Ait06]
3.3.1.1 Description du système
La figure 2.1 nous illustre un modèle
géométrique d'un système de vision
stéréoscopique non anthropomorphe (est un système dont les
axes des caméras ne sont pas coplanaires), équipéde deux
caméras en mouvement de rotation. Dont on a :
- IM1 (resp. IM2) est le plan de projection de la camra1 (resp.
camra2), - L1, L2 : les lentilles des deux caméras (centres
optiques),
- P1, P2 : points d'impact des axes optiques sur les plans IM1,
IM2,
- (P1, U1, V1) : repère cartésien
orthonormé-dit théorique- liéau plan IM1, construit ainsi
:
- P1U1 est parallèle aux lignes de l'image IM1,
- P1U1 est parallèle aux colonnes de l'image IM1 (sur une
caméra CCD1 les lignes sont perpendiculaires aux colonnes
[ABI89]),
- l'unité, que ce soit sur O1U1 ou
O1V1 est soit le pixel ou le millimètre (mm). Le passage
d'une unitéa` l'autre (pixel-mm par exemple) obéit a` la
transformation suivante :
U1 = (ex).u1
'Charged Coupled Device
V1 = (ez).v1
Sachant que (ex, ez) représentent les facteurs de
changements d'échelle et (U1, V1) (resp. (u1, v1)) Les
coordonnées d'un point image dans le système o`u
l'unitéest le pixel (resp. le mm)
- (P2 U2 V2) : repère cartésien
orthonormé-dit théorique- lier au plan IM2, construit de
manière analogue a` (P1 U1 V1),
- (O1 x1 y1 z1) [resp. (O2 x2 y2 z2)] : Repère
cartésien orthonormé-dit théorique- liéa` la camra1
(resp la camra2) construit de la manière suivante :
- O1 (resp. O2) est situésur l'axe optique de la
camra1 (resp. camra2) a` une distance d1 (resp. d2) de P1 (resp. P2). La valeur
de d1) (resp. d2)) peut varier d'un mouvement a` un autre ; le centre de
rotation de la caméra n'est pas connue et peut changer a` chaque
rotation (voir figure)
- O1O1 (resp. O2O2) est
parallèle a` P1V1 (resp. P2V2),
- L'unitéutilisée sur ce repère est le
mm,
- O1x1 et O2x2 sont colinéaires.
- è1 ( resp. è2 ) : angle de rotation de la camra1
(resp. camra2) autour de l'axe O1z1 (resp. O2z2),
- p : distance entre O1 et O2,
- è2 : angle d'inclinaison de la camra2 par rapport a` la
camra1 ;
- f : distance focale.
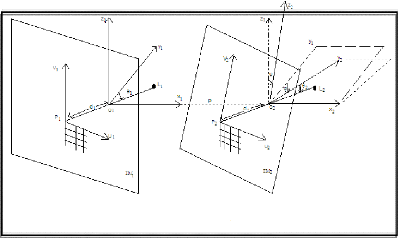
FIG. 3.2 - Modélisation géométrique de la
tête de vision stéréoscopique.
3.3.2 Coordonnée projectifs avant et après
rotation
Un point P(x,y,z) se projette sur le plan image en un point
P1(U1); V1)) sur l'image1, et en un point P2(U2); V2)) sur image2, comme sera
montrédans les fonctions suivantes :
· Avant rotation
(a) Sur IM1
|
U = (ex).f.
|
- cos(è1).x + sin(è1).y
|
|
sin(è1).x + cos(è1).y + d1 - f
|
|
V = (ez).f.
|
-Z
|
|
sin(è1).x + cos(è1).y + d1 - f
|
(b) Sur IM2
|
U2 = (ex).f.
|
- cos(è2).(x - p) + sin(è2).(y. cos(?) + z.
sin(?))
sin(è2).(x - p) + cos(è2).(y. cos(?) + z. sin(?)) + d2
- f
|
sin(?).y - cos(?).z
V2 = (ez).f. sin(è2).(x - p) + cos(è2).(y. cos(?) +
z. sin(?)) + d2 - f
Apres un certain nombre de rotation des caméras d'un
angle (a1 ,a2 ) autour de O1z1 (resp.O1z2 ) a` partir de sa position
de départ a1 (resp. a2 ); Les cordonnées de projection du point
objet P(x,y,z) sur les deux images IM1 et IM2 changent.
(a) i. Sur IM1
|
U = (ex).f.
|
- cos(è1 + a1).x + sin(è1 + a1).y
|
|
sin(è1 + a1).x + cos(è1 + a1).y + d1 - f
|
|
V = (ez).f.
|
-Z
|
|
sin(è1 + a1).x + cos(è1 + a1).y + d1 - f
|
ii. Sur IM2
cos(è2 + a2).(x - p) + sin(è2 + a2).(y. cos(?) +
z. sin(?))
Uk 2 = (ex).f. sin(è2 + a2).(x - p) + cos(è2 +
a2).(y. cos(?) + z. sin(?)) + d2 - f
3.3.3 Relations entre les cordonnes 2D et 3D
|
u1 = ex.f
|
- cos(è1).x + sin(è1).y
|
|
sin(è1).x + cos(è1).y + d1 - f
|
-z
sin(è1).x + cos(è1).y + d1 - f
On note que x=X.(d1-f) ,y=Y.(d1-f) donc on aura
v1 = ex. f
- cos(è1).X + sin(è1).Y
u1 = ex.f sin(è1).X + cos(è1).Y + 1 (1)
|
v1 = ex.f
|
-Z
sin(è1).X + cos(è1).Y + 1 (2)
|
On divise (1) sur (2), on aura
.Y (3)
X
?
R
?
R?..Z = cos(è1).X - sin(è1).Y
cos(è1) sin(è1) Z = .
R
|
uk = ex . f
1
|
- cos(è1 + á).x + sin(è1 +
á).y
sin(è1 + á).x + cos(è1 + á).y + d1 -
f
|
On a aussi
vi = ex.f
-z
sin(è + á1).x + cos(è1 + á).y + d1 -
f On note que x=X.(d-f) ,y=Y.(d-f) donc on aura
|
uk = ex.f
1
|
- cos(è1 + á).X + sin(è1 + á).Y
(4)
sin(è1 + á).X + cos(è1 + á).Y + 1
|
|
vk1= ex.f
|
-Z
(5)
sin(è1 + á1).X + cos(è1 + á).Y +
1
|
On remplace (3) dans (5)
|
vi = ez. f.
|
cos(è1) 1 .X + sin(è1)
1 .Y
R0 R0
|
|
sin(è1 + á1).X + cos(è1 + á).Y + d1
- f
|
Donc on a
X.(sin(è1 + á).vk1 +
ez.f cos(è1) )+ Y.(vk 1.
cos(è1 + á) - ez.f.sin(è1) ) + v1 = 0
R0 R0
1 1
On remplace :
A = sin(è1 + á).vk1 + ez.f
cos(è1)
R0 1
B = vk1. cos(è1 + á) -
ez.f. sin(0è1)
1
C = v1
|
Donc on a
A.X + B.Y + C = 0 X =
On remplace x dans (4) on aura
|
-B.Y - C
|
|
A
|
|
uk1 = ex.f
|
- cos(è1 + á). A (-B.Y-9 +
sin(è1).Y
|
|
sin(è1).(-B.X-C) +
cos(è1).Y + 1
|
|
sin(è1).(
|
-B.Y - C
A ).uk 1+uk 1.
cos(è1).Y +uk 1 = ex.f(- cos(è1+á).(
|
-B.Y - C A )+sin(è1).Y
|
1 +uk1 . sin(è1+á).C+ex.f.
cos(è1+á).C
(-uk )
Y = A
-ex. f.sin(è1+ á) + uk1.
cos(è1 + á) . sin(è1+á).B-Aex.f.
cos(è1+á).B
3.3.4 Conclusion
Dans cette section on a présentécomment calculer
la 3eme coordonnée a` partir des coordonnées 2D par
les différentes équations et leur démonstration .
Après qu'on a trouvéla relation entre les coordonnées 2D
et les coordonnées 3D, on remarque que, pour déterminer X, Y, Z
il nous faut d'abord déterminer les angles de rotation á et
è ; et pour cela nous allons exploiter le suivi d'un groupe de segments
dans une séquence d'image.
3.4 Suivi d'un segment dans une s'equence
d'images [ISR07]
Soit v0 = ai,0.u0 + bi, 0 l'equation d'un segment i dans une
image o`u ai,0 est la pente du segment i dans l'image0 et (u0,
v0)les coordonnees 2D d'un point de segment de droite.
-a0 cos (á
exb f
D'apr`es certaines transformations on aura : ak. sm " = 0 =
(a) .
ä
Remarque :
Nous pouvons constater que l'expression des coordonnees images
d'un point est de même forme dans les deux images (gauche et droite).
C'est pourquoi, la relation entre les pentes des segments de droite dans les
images successives droites va être de la même forme que celle
obtenue par les segments des images gauches, donc il suffit de developper la
relation sur les donnees de l'image IM1.
3.4.1 'Equation de mouvement d'un segment I :
,
Apr`es rotation d'un angle á : ai 1-ai,0
cos(á)sin(á) = bi,0
ex.f (6)
Apr`es rotation d'un angle â : ai,1-ai,0 cos(â)
sin(â) = bi,0
ex.f (7)
3.4.1.1 Application de la m'ethode
A partir du rapport entre les deux equation (6) et (7) on peut
deduire que :
|
ai,1-ai,0 cos(á) ai,2-ai,0 cos(â) =
|
sin á
sin â
|
Si on applique le même principe pour le segment j on
obtient : aj,1-aj,0 cos(á) aj,2-aj,0 cos(â) =
sin á
sin â
ai,1-ai,0 cos(á) cos(á)
A partir de cette derni`ere equation on aura
cos(â) aj,2-aj,0 cos(â)
(aj,1.ai,0-ai,1.aj,0. cos(â))+(ai,2.aj,0-aj,2.ai,0.
cos(á)+(aj,1.ai,2-ai,1.aj,2) =
0 si on remplace
c1 = aj,1.ai,0 - ai,1.aj,0
c2 = ai,2.aj,0 - aj,2.ai,0
c3 = aj,1.ai,2 - ai,1.aj,2
On aura :
c1 cos(â) + c2 cos(á) + c3 = 0 (A)
C'est une equation a` 2 inconnus, pour resoudre cette equation il
faut une autre equation a` 2 inconnus, pour cela il suffit de prendre 2 autres
segments
k et l, on aura : cp,1 cos(â) + cp,2
cos(á) = cp,3 (B)
Tel que :
cp,1 = al,1.ak,0 -- ak,1.al,0
cp,2 = ak,2.al,0 -- al,2.ak,0
cp,3 = al,1.ak,2 -- ak,1.al,2
La resolution de ce système d'equations (A) et (B) :
{
c1. cos(â) + c2. cos(á) = c3 cp,1. cos(â)
+ cp,2. cos(á) = cp,3 Si det(c1 * cp,2 -- c2 * cp,1) =6 0
Alors :
cos(á) = ((c3*cp,2)-(cp,3*c2))
det
cos(â) = ((c1*cp,3)-(c3*cp,1))
det
La resolution de ce système necessite 4 segments dans 3
sequences d'images. La valeur de la solution est le mouvement effectuepar la
camera pour l'obtention de l'image suivante donc une valeur qui reste constante
si les segments consideres correspondent aux bons appariements. Nous pouvons
enoncer la proposition suivante :
proposition :Soient i, j, k, l quatre segments de IM0, de IM1
i1, j1, k1l1 et i2,j2, k2, l2 de IM2 Les valeurs cos(á)et
cos(â)obtenues après resolution du système correspondent
aux mouvement reel de la camera si et seulement si chaque triplet de segments
(i, i1, i2),(j, j1, j2), (k, k1, k2),(l, l1, l2) contient le
même segment dans les differentes images. La solution ayant engendrele
plus grand score en nombre de quadruples de segments obtenus, sera la bonne
solution. Ainsi nous pouvons dire que nous avons résolu
deux problèmes : le problème d'appariement et celui du mouvement
des caméras.
3.4.1.2 Algorithme De Suivi :
Début
Extraction de contour de chaque image (IM1; IM2; IM3) Segmente
les images (IM1; IM2; IM3)
Extraction de primitives (segments de droite) de IM1; Calculer la
pente de chaque segment de IM1
Extraction de primitives (segments de droite) de IM2; Calculer la
pente de chaque segment de IM2;
Extraction de primitives (segments de droite) de IM3; Calculer la
pente de chaque segment de IM3;
Regrouper en groupe de quatre les segments de IM1 dans T1;
Regrouper en groupe de quatre les segments de IM2 dans T2; Regrouper en groupe
de quatre les segments de IM3 dans T3; - Pour tout groupe de segments de IM1
faire
- Pour tout groupe de segments de IM2 faire
- Pour tout groupe de segments de IM3 faire
- Calculer (cos a, cos â)
- Fin pour
- Fin pour
- Fin pour
Calculer le score pour chaque solution trouvée;
Choisir les groupes de segments qui engendrent le plus grand
score;
Etablir la correspondance entre les segments de droite dans les
différentes images ayant engendrés le plus grand score.
Fin.
Remarque :
- Les valeurs de cos(a)et cos(â)correspondent au mouvement
effectuépar la caméra.
- - La bonne solution de cos(a) et cos(â) correspond a` la
valeur ayant engendrée le plus grand score.
Conclusion (Méthode ) :
l'avantage de cette méthode est qu'elle permet de
résoudre le problème d'estimation du mouvement.
On remplace cos(á) ou cos(/3)dans les formules
précédentes, on aura les coordonnées 3D (X, Y, Z) de
chaque point de l'image.
3.5 Résultat d'experimentation
3.5.1 Application a` des images de synthése
Dans la suite on va présentéles résultats
obtenus On va appliquer nos algorithmes sur une séquence de trois
images,voir la figure suivante :
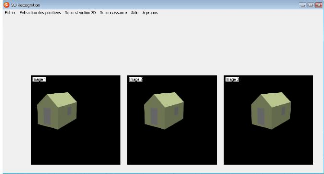
FIG. 3.3 - Une sequence de trois images.
Suivi avec les segments de droite
La premiere chàose a` faire est d'extraire les contours
des images de la sequence, puis on effectue une segmentation de contours par
une approximation de contours en segment de droite. La figure suivante montre
le résultat
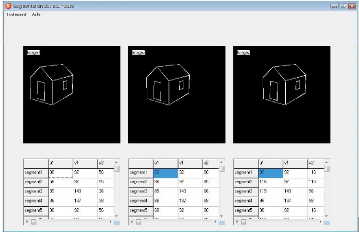
FIG. 3.4 - Extraction des segment de droite des trois
images.
Calcul des angles de rotation : Aprés qu'on a extrait
les segments de droite de la séquence d'images, on a
appliquél'algorithme de suivi 3.4.1.2, on aura le resulatat suivant :
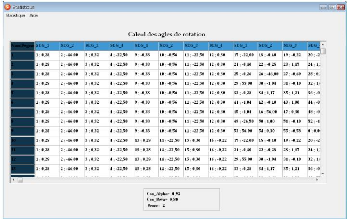
FIG. 3.5 - Calcul des angles de rotation.
La carte de profondeur : Le calcul de la carte de profondeur
consiste a` calculer les coordonnées tridemensionnelle (X,Y,Z).
Apres qu'on a trouvéles angles de rotation á et 3 ,
on remplace ses valeurs dans les formules de X,Y et Z. Le resultat est
montrésur la figure
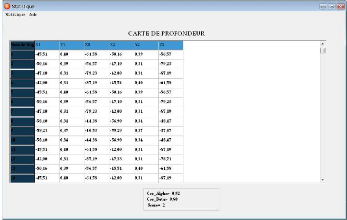
FIG. 3.6 - La carte de profondeur.
La reconstruction projective : La reconstruction 3D est la
présentation tridemensionnelle de la sc`ene. Apres qu'on a
trouvéla carte de profondeur,on peut donc utiliser les valeurs de X,Y et
Z pour une reconstruction projective le résultat est montrésur la
figure suivante
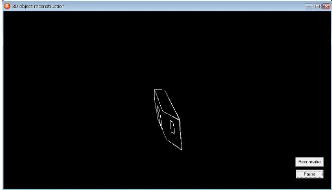
FIG. 3.7 - La reconstruction projective de la scene.
Localisation de l'objet polyédrique : La localisation de
l'objet consiste a` determiner sa position dans scene pour une eventuelle
identification. Apres qu'on a arrivéa` une reconstruction projective de
la sc`ene, nous avons appliqués l'algorithme que nous avons
développés pour la localisation de l'objet polyedrique. On a
obtenu le resultat suivant :
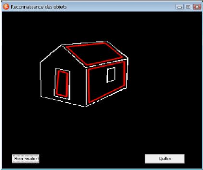
FIG. 3.8 - Localisation de l'objet dans la scene.
3.5.2 Application a` des images réelles
Dans la suite on va appliquer nos algorithme sur une
séquence de trois images captées par une camera en mouvement de
rotation.
La figure suivante montre la sequence d'images
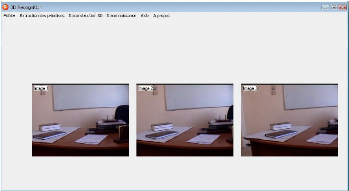
FIG. 3.9 - Sequence d'image reelle
Suivi avec les segments de droite
On extrait les contours des images de la sequence, puis on
effectue une segmentation de contours par une approximation de contours en
segment de droite. La figure suivante montre le résultat
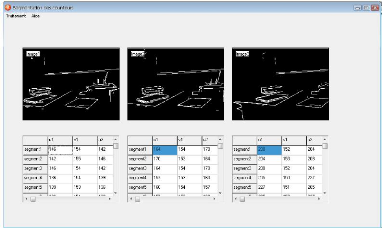
FIG. 3.10 - Extraction des segments de contours
Calcul des angles de rotation :
Apres l'extraction des segments de droite des trois images on a
appliquél'algorithme de la section 3.4.1.2 ,on aura le
résultat suivant :
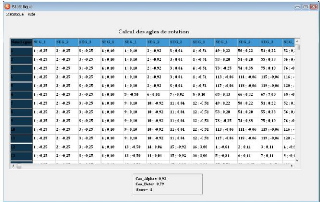
FIG. 3.11 - Calcul des angle de rotation
La carte de profondeur
On remplace la valeur de á et 3 dans les formules de X,Y,Z
.Le resultat est montrésur la figure suivante :
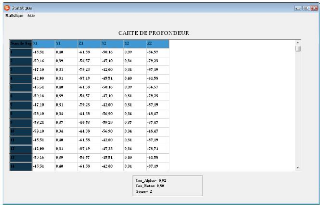
FIG. 3.12 - La carte de profondeur
La reconstruction 3D
La carte de profondeur est calculédonc on peut l'utiliser
pour la reconstruction projective, le resultat obtenu est montrésur la
figure
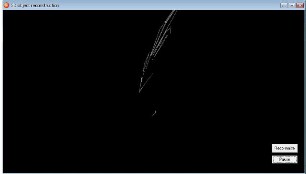
FIG. 3.13 - La scene reconstruite
Localisation de l'objet polyédrique
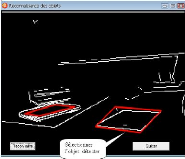
FIG. 3.14 - Localisation de l'objet dans la scene
3.6 Conclusion
Dans ce présent chapitre nous avons montrés
l'algorithme dévloppépour la localisation tridemensionnelle,bien
sàur a` partir d'une scene reconstruite. On a vu que pour se faire il
faut calculer la carte de profondeur, ainsi nous avons
présentél'aspect théorique et algorithmique de la
méthode qui nous a permet de faire le suivi et la mise en correspondance
d'un groupe de segments dans une séquence d'image prise par une
caméra en mouvement. Les résultats d'expérementation sur
des images de sinthése ont montrés la faisabilitéde
l'algorithme,et sur les images réelle ont confirméque
l'algorithme pouvais bien localiser certains formes dans la scéne.

Chapitre4
Environnement de realisation et
d'experimentation
4.1 Introduction
Ce chapitre est introduit pour la description du
l'envirennement dans lequel on developpénotre application, ainsi que les
défirentes composantes de l'application
4.2 L'envirennement de l'experementation
l'application a étédeveloppésur un micro
ordinateur portable intel RPentium Core Duo inside 1.6 GHZ,1.6 GHZ ,et une
carte graphique Mobile intel R945GM Express Chipset Family (224.0 MB) dans un
systéme Windows XP professionnel.
4.3 Langage de programmation
Le langage utilisépour notre application est le Borland
C++ Builder, c'est un environnement de développement
intégrépour le langage C++ sous Windows. L'environnement de
développement s'appuie sur un éditeur d'interface graphique
associéa` un éditeur de code source. Il permet de
développer des applications graphiques qui peuvent être
liées aux bases de données .
Tout d'abord C++ est un outil RAD, c'est a` dire
tournévers le développement rapide d'applications (Rapid
Application Development) sous Windows. En un mot, C++ Builder permet de
réaliser de facon très simple l'interface des
applications et de relier aisément le code utilisateur aux
événements
Windows, quelle que soit leur origine (souris, clavier,
événement système, etc. )[ISI 99]
Cet envirennement possède les caractristiques suivantes
:
· Syntaxe claire du langage C++.
· Facilitéde prise en main atteinte gràace a`
des outils de conception visuelle.
· Augmentation de la productivitégràace a` la
diversitéde ses outils.
· Facilitéde compréhension de la structure de
l'application a` l'aide d'une fenêtre qui permet de visualiser la
hiérarchie des objets.
· Flexibilitéet puissance atteinte gràace a`
l'éditeur de code et l'inspecteur d'objets.
· Présence d'une bibliothèque riche en
composants
Le développement de notre application sous
l'environnement C++ Builder 6 consiste a` :
· Concevoir une interface graphique qui assure la
communication entre l'utilisateur et le logiciel.
· Spécifier les propriétés des
différents composants utilisés (Fenêtres, Boutons, Zone
d'édition, etc.....).
· Spécifier le code source associéa`
l'exécution d'une action par l'utilisateur.
4.4 Pr'esentation de l'application
3D Recognition est le logiciel qu'on
développédont le but est de contribuer a` résoudre le
problème de la reconstruction 3D et la reconnaissance des objets
polyédrique a` partir d'une carte de profondeur et ceci a` partir d'une
séquence d'images prises par une caméra en mouvement de rotation
Dans la suite on va
décrire notre application en illustrant les
déférentes interfaces qui l'a
composéfenêtre principale
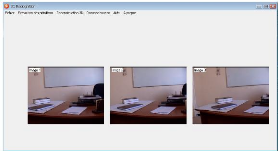
Elle compte une barre d'outils.
La barre d'outils : compte cinq menus
· Fichier
· Extraction de primitives
· Reconstruction 3D
· Reconnaissance
· Aide
· A propos
(a) Le menu fichier compte quatre item

L'item Ouvir compte trois sous items
- image1 : sert a` ouvrir l'image une de la sequence d'image.
- imege2 : sert a` ouvrir l'image deux de la sequence d'image. - image3 : sert
a` ouvrir l'image trois de la sequence d'image. L'item Enregistrer sert a`
enregistrer les trois images.
L'item Enregistrer sous sert a` enregistrer les trois images
dans endroit bien defini. L'item Quitter sert a` fermer et quitter
l'application.
(b) Le menu Extraction de primitives : sert a` extraire les
differentes primitives des trois images. Il compte deux item

L'item points d'interets pour extraire les differentes points
d'interet des trois images et determine leurs cordonnees dans le plan image
L'item Contours pour extraire les contours de la scene sur les trois images
(c) Le menu Reconstruction 3D pour afficher le modéle 3D
reconstruit de la sc`ene.

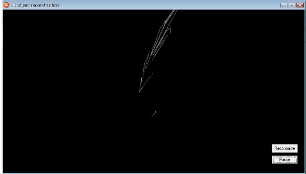
(d) reconnaissance sert a` reconnaitre l'objet present dans la
sc`ene.

(e) Le menu Aide : pour afficher l'aide
(f) Le menu A propos une fenetre d'information
Les déffirentes fenetres secondaires Extraction de
primitives
1. Les points d'interets
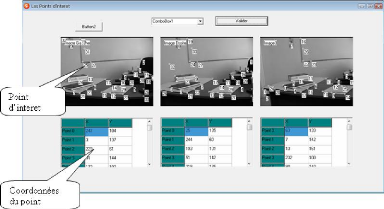
Les contours
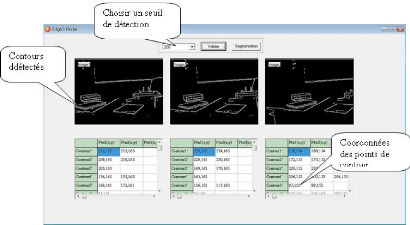
Les segments de contour
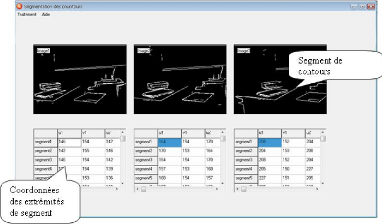
La fenetre »Les segment de contour compte deux
menus»
1. Traitement
2. Aide: Pour afficher l'aide Le menu Traitemment compte quatre
item
- Segmentation de contour : pour afficher les segments de
contours des trois images.(Voir haut de page)
- suivi : comporte deux sous items
- Appariemt : pour faire de l'appariement des segments de
droite
- Quitter : pour fermer la fenetre et revenir a` la fenetre
principale
L'item Suivi compte deux sous items
(a) Suivi avec les segment de droite.
Cette interface contient un menu Statistique
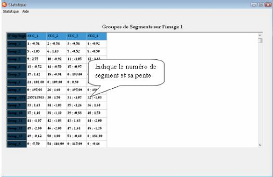
(b) Calcul des angles de rotation cette interfece sert a`
afficher les valeur de cos á et cos 3 calculé
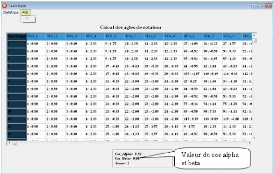
Le menu Statistique compte item
· Groupe des segments : sert a` afficher l'ensemble des
segments de l'image et ses pentes (voir haut de page)
· Regroupement des segments
· Carte de profondeur
· Quitter : pour quitter la fenêntre et revenir a` la
fenêntre principale

L'item Regroupemnt de segment : Regroupement des segments : sert
a` afficher l'ensemble des segment sur l'ensembles des images et ses pentes.
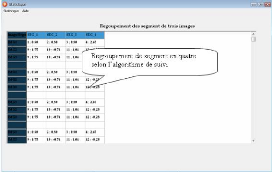
L'item carte de profondeur : sert a` calculer et afficher les
coordonnées 3D des extrémités de segments.
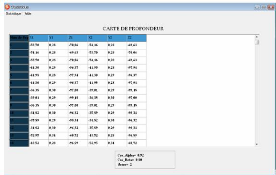
On clique sur le menu reconnaitre de la barre d'outil de la
fenêtre principal on aura la fenêtre principale.
la fenêtre sert a` afficher les surfaces des objets
detectés sur l'image, elle met des carres en rouge pour chaque surface
detecté
4.5 Conclusion
Dans ce chapitre on a présentél'envirennement
dans lequel on a realiséce logiciel, et une description du l'application
qu'on developpé,esperant bien qu'on a bien illustréles
déffirentes interfaces du logiciel
Conclusion Générale
Les problèmes pos'es par la vision par ordinateur sont
multiples et encore loin d'être r'esolus car ils sont souvent très
complexes. C'est un sujet de recherche qui passionnent les chercheurs depuis
plus de trente ans. Dans le cadre de ce m'emoire nous avons concentr'e notre
travail sur une petite partie du vaste domaine de la vision par ordinateur : la
reconstruction 3D et la reconnaissance d'objet.
La reconnaissance d'objets est une tâche qui peut
paraàýtre très simple pour un op'erateur humain.
Effectivement il est capable de s'adapter a` une grande vari'et'e de situations
comme par exemple le changement de fond, les variations d'illuminations, les
occultations, ou les changements de points de vue.
l'inverse, la reconnaissance d'objet est une tâche
très complexe a` r'ealiser par une machine. En effet, durant le
processus de perception, l'homme utilise une large quantit'e d'informations :
deux collections de points disponibles sur les r'etines, et une quantit'e
très importante de connaissances. Ces informations sont trait'ees avec
une rapidit'e et une robustesse incroyables et avec une qualit'e telle qu'il
peut même la plupart du temps »reconnaàýtre» un
objet qu'il n'a jamais vu. L'homme est donc sans nul doute le plus parfait des
systèmes de reconnaissance.
Sans aller jusqu'a l'id'ee utopique de le copier, on doit donc
essayer d'imiter quelques unes de ses facult'es. une m'ethode de d'etection
automatique des objets bas'ee sur l'attribut classiquement utilis'e : les
segments de droite .les r'esultats obtenus sont int'eressants.
Partant de ce constat, après une 'etude bibliographique
sur les m'ethodes de reconnaissance d'objet et de pr'etraitement des images,
pr'eparant de manière robuste la segmentation par d'etection de contour.
De plus, cet algorithme est rapide et a 'et'e test'e et valid'e sur un grand
nombre d'images très diverses.
Comme perspective, les attributs extraits servent seulement a`
confirmer la pr'esence d'un objet. Il est n'ecessaire d'extraire d'autres
attributs et d'appliquer un algorithme de classification pour aboutir a` une
m'ethode de reconnaissance complète. Quoi qu'il en soit,
la méthode développée est automatique et
sans connaissance a priori sur les objets, c'est`a-dire que ne n'avons pas de
modèles des objets seulement des considérations simples de formes
comme la présence de droites, de cercles et d'ellipses. Elle permet de
segmenter l'image prétraitée avec une meilleure qualitéde
contours et de sélectionner automatiquement dans les images les contours
les plus pertinents (qui serviront ensuite a` reconnaàýtre
l'objet). Problème posépar cette méthode est les
problèmes d'occultations et de bruits
Pour conclure sur les perspectives de travail. Pour l'approche
classique, on peut compléter l'extraction d'attributs de la
méthode de reconnaissance par les segments par l'ajout d'attributs tels
que la courbure des contours ou différents descripteurs de formes. Pour
cela, l'utilisation de l'information de couleur. Enfin cette approche classique
pourrait être améliorée en implémentant une
méthode de classification pour finaliser le système de
reconnaissance.
Bibliographie
[AIT 06] . AIT KACI AZZOU, S LARABI. A new method to track line
segment in sequence of image using only its s lope JCS 2(10), 2006.
[AYA 86] AYACHE. Vision stéréoscopique et
perception multisensorielle : Application a` la robotique mobile. Cillection
science informatique, Intel Edition 1989.
[BAR,GOS 98] . Barsi, L. Gosta, D.Geiger et D.Jacobs.
»Determining the similarity of deformable shapes» 1998.
[BEN 09] N.BEN IKHLEF et M.BEN AMRAOUI . Elaboration de carte de
profondeur.Application sur les images. Memoire d'ingeniorat UFAS 2009
[BIN 93] .O. BINFORD ET T.S. LEVITT, <<QUASI INVARIANTS
: THEORY AND EXPLOITATION>>, IN PROCEEDINGS OF DARPA, IMAGE UNDERSTANDING
WORKSHOP 1993.
[BLU 67] . Blum. A Transformation for Extracting New
Descriptors of Shape, In Models for the Perception of Speech and Visual Form,
(W.Wathen-Dunn, ed.), Cambridge Press, 1967
[BUB 98] . Bubel, R. Bergevin, Classifying junctions by vector
quantization, in : Vision Interface'98, 1998
[Bus2001] Martin Bus. Reconnaissance d'objets a` partir de points
3D obtenus par appariement stéréoscopique pour la localisation
absolue d'un robot mobile
[COL 96] V. Colin de verdiere. Reconnaissance d'objets par
leurs statistique de couleurs
[COU 2000] J.Coughlan, A.Yuille,C.English et D.Snow »
Efficient deformable template detection and localization without user
initialization» 2000.
[FUN 95] B.V.FUNT and G.D Finlayson. Color constant color
indexing
[GRO 95] . GROS, <<Matching and clustring : two steps
towards object modeling in com-
puter vision >>,the international
journal of robotics research, 14(5), Octobre, 1995
Bibliographie
[HEA 94] G. Healay and D.Slater. using illumination invariant
color histogram descriptor for recognition.
[Het 95] F.Hetitger.Feature detection using suppression and
enchancement. Technical Report 163. Communication Technology Laboratory. Swiss
Federal Institute of Technology ITH 1995
[HOR 93] Radu Horaud et Oulivier Monga , vision par ordinateur
1993(first edition) [ISI 98] ISIMA 1988,1999. Introduction a` C++ builder
[ISR07] .ISRIG K.KEZAR Suivi d'un objet dans une séquence
d'images application a` des images réelles, mémoire
d'ingéniorat UFAS 2007
[Jai 96] A.Jain,Y.Zhong et S.Lakshmanam » Object matching
using deformable templates» IEEE PAMI, 1996
[KOZ 98] R. Kozera » An overview of the shape from shading
problem» Machine Graphics and Vision, 1998.
[LAM 98] Bart LAMIROY . Reconnaissance et modelisation des objets
3D a l'aide d'invariant projectifs et affines.
[NAG 95] K. Nagoa . Recognition 3D objects using photometric
invariants.
[SCH 97] :ernt SCHIELLE . Reconnaissance des objets utilisant des
histogrammes de champs réceptifs.
[SHA 99] Shaheen Mudar . Reconnaissance d'Objets
Polyédriques a` partir d'une image vidéo pour la
téléopération
[SOS92] Humberto Sossa . Reconnaissance d'objets
polyédriques par indexation dans une base de modèles.
[SWA 90] M.J. SWAIN. Color indexing technical report
[PJM 09] Pierre-Marc Jodoin »Vision par ordinateur»
Hiver 2009
[ZHA 99] R. Zhang, P.-S. Tsai, J. Cryer and M. Shah. Shape from
shading : A survey. IEEE Trans. on Pattern Analysis and Machine Intelligence,
August 1999. Webliographie
[1] Programming With Intel Ipp (Integrated Performance
Primitives) And Intel Opencv (Open Computer Vision) Under Gnu Linux. A
Beginner's Tutorial, Jérôme Landré.
[2] Yahoo! OpenCv Discussion Group : http ://
tech.groups.yahoo.com/group/OpenCV/
1. Matrice Fondamentalle La matrice fondamentale est la
matrice qui permet de lier les coordonn'ees dans le repère image
r'ef'erence d'un point avec l''equation d'une droite appel'ee droite
'epipolaire dans l'image correspondante. S'il existe le point correspondant se
trouve sur cette droite.
2. 'Epipolaire (géométrie) la g'eom'etrie
'epipolaire est la g'eom'etrie qui d'ecrit la conformation d'un capteur
st'er'eoscopique. On distingue particulièrement dans cette g'eom'etrie
les 'epipôles et les lignes 'epipolaires.
3. Distorsion Le ph'enomène de distorsion peut se
manifester de diverses facons mais se traduit toujours par une
d'eformation des r'esultats. Dans ce cas, la distorsion se traduit par une
d'eformation visuelle des images visualis'ees. On aborde 'egalement la notion
de distorsion radiom'etrique qui se traduit par une d'eformation du spectre
d'intensit'e lumineuse.
4. Paramètres intrinsèques : Ce sont des
paramètres inh'erents a` la cam'era qui permettent d''etablir la
transformation permettant de passer du repère cam'era au repère
image. On parle de matrice cam'era.
5. Paramètres extrinsèques Ce sont des
paramètres qui permettent d''etablir les 'equations de passage entre le
repère cam'era et le repère de calibration. Ils sont au nombre de
12 et repr'esentent une rotation ainsi qu'une translation. Ces
paramètres varient selon la position de la mire de calibration.
6. Rectification :La rectification est une 'etape du
processus de vision 3D qui vise a` simplifier la contrainte 'epipolaire en
rendant les lignes 'epipolaires parallèles : après
la rectification des images la recherche de correspondant se
réduira a` une simple recherche sur la ligne correspondante dans l'autre
image au lieu de prendre place sur la ligne épipolaire.
7. Distance focale : La distance focale est la distance qui
sépare le point nodal d'émergence (ou centre optique) du capteur.
Plus la focale est longue et plus l'angle de vision est faible.
8. Corr'elation : La corrélation est l'action de
mettre en correspondance les points similaires. On forme des paires de points.
Les outils pour la corrélation sont les mesures de similitude et
l'algorithme d'appariement.
Open Cv (Open Computer Vision) est une Librairie Open Source
qui comporte un certain nombre d'algorithmes et d'exemples de code pour la
vision par ordinateur. Cette librairie vise a` simplifier la conception
d'applications d'edi'ees a` la vision en temps r'eel, la reconnaissance de
contours, la segmentation etc... Le fait qu'elle soit Open Source signifie
qu'elle est très 'evolutive puisque le d'eveloppement de nouvelles
fonctions, nouveaux algorithmes, sont r'ealis'es par une vaste communaut'e. Par
ailleurs Open Cv est bâti sur IPL (Intel Image processing library), dont
elle reprend le format d'images (IPL Image) ainsi qu'un certain nombre de
fonctions de filtrage, etc. Elle impl'emente 'egalement un certains nombres
d'algorithmes exclusifs. La librairie rajoute 'egalement un certain nombre de
notions telles que la gestion des espaces couleurs RGB. Open Cv est compos'ee
de quatre grands blocs de fonctions.
- CxCore comporte les Fonctions de base d'Open Cv (fonctions de
dessin, de gestion des points etc.)
- Cv comporte les Fonctions principales du traitement de
l'image : un certain nombre de fonctions de filtrage (Sobel, Canny...) ainsi
que les fonctions de calibration, appariement etc...
- HighGui comporte les fonctions de gestion des interfaces
graphiques. Celle-ci sont simplifi'ee et permettent principalement la cr'eation
de fenêtres graphiques dans lesquelles seront affich'ees des images ou
des flux vid'eo.
- CvCam contient un certain nombre de fonctions de gestions de
Webcams, utiles pour ouvrir des flux vid'eo.
Par ailleurs OpenCv dispose d'une communaut'e importante qui
se manifeste sur un certain nombre de groupes de discussion. Nous avons pour
notre part utilis'e le groupe de discussion Yahoo! qui est un des groupes les
plus actifs.
Notons par ailleurs que la librairie fonctionne sous windows
Linux, et est adapt'ee pour les langages C++ et Python.
| 

