IV.1 Introduction
Dans ce chapitre nous donnerons le fonctionnement du
système ainsi que sa réalisation.
IV.2 Fonctionnement du système
Pour un avion, la vitesse relative de l'air et de la voilure
génère une action mécanique qui permet à l'engin de
voler. On distingue deux composantes de cette action aérodynamique :
· la traînée qui est la résistance
à l'avancement. De son action sur le rotor de
l'hélicoptère, il résulte un couple tendant à faire
tourner l'appareil autour de son axe, d'où la nécessité
d'un dispositif anti couple.
· la portance qui soulève l'appareil.
Le contrôle d'un appareil repose sur la gestion de cette
portance. Alors que sur les avions, des gouvernes permettent de modifier la
portance des ailes pour virer, monté... ; Sur
l'hélicoptère, on modifie le pas et l'inclinaison des pales.
Sur l'hélicoptère on contrôle la portance
d'une pale suivant sa position par rapport à l'appareil. C'est le
rôle du plateau cyclique, pièce principale du dispositif de
commande de vol.
Pour que l'hélicoptère avance, une force
à composante horizontale est nécessaire. Si on augmente la
portance des pales lorsqu'elles sont 90° avant de passer au-dessus de la
poutre du rotor de queue (décalage angulaire du aux forces
gyroscopiques), leur plan de rotation s'incline vers l'avant, grâce
à une articulation en battement reliant chaque pale à l'axe de
rotation, et l'inclinaison de la portance produit la composante horizontale
nécessaire. Il reste toutefois une composante verticale principale qui
s'oppose au poids permettant le maintien en l'air, et la composante horizontale
motrice engendre le mouvement d'avancement, donc accélération
jusqu'à une vitesse où la traînée globale
(résistance à l'avancement de l'hélicoptère)
s'équilibrera avec la composante motrice.
Nous nous sommes proposés de commander par souci de
simplicité juste le vol stationnaire, car ne nécessitant pas
plusieurs combinaisons de commandes du point de vue manipulation.
C'est au niveau du programme que le tout débute,
l'utilisateur lance le programme et choisi le port de communication,
disponible.
En cliquant sur les boutons radio disponibles sur l'interface
utilisateur et déterminant la puissance de l'envol ; le noyau du
programme modifie les états binaires des broches
désignées.
Les sorties du port série, qui sont reliées aux
entrées de l'interface électronique, modifient les états
des signaux électriques de façon physique en fonction des
instructions du noyau.
Les variations binaires des broches RTS, DTR, et TXD sont des
images de la table de vérité qui modifient la valeur de la
résistance équivalente du réseau des résistances
montées sur la carte interface électronique.
Le tableau 4.1 montre la table de vérité selon les
broches TXD, DTR, et RTS Tableau 4.1 montre la tabe de vér
|
C
|
B
|
A
|
|
0
|
0
|
0
|
|
0
|
0
|
1
|
|
0
|
1
|
0
|
|
0
|
1
|
1
|
|
1
|
0
|
0
|
|
1
|
0
|
1
|
|
1
|
1
|
0
|
|
1
|
1
|
1
|
|
TXD
|
DTR
|
RTS
|
~ 48 ~
Comme on peut le constater sur la figure 4.1, c'est un ULN2003
qui relève le niveau électrique des signaux à appliquer
sur les bases des Driver qui pilotent les relais.
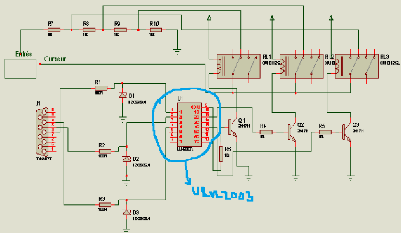
Figure.4.1 l'électronique du potentiomètre.
Le circuit intégré uln2003 contient des buffers
comme illustré sur la figure 4.2
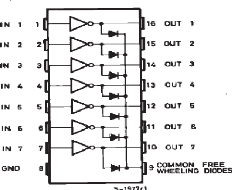
Figure.4.2 composition interne de l'uln2003.
Ce sont les Broches DTR, RTS et TXD qui émettent les
signaux de commande de relais magnétiques.
Les armatures de ces relais commutent les résistances pour
modifier leur valeur équivalente.
Ainsi l'interface se comporte comme une résistance
variable en fonction des signaux en provenance du port série de
l'ordinateur.
Les valeurs de cette résistance équivalente sont
disponibles sur les broches « curseur » et « entrée
».
| 

