CHAPITRE 2
TECHNOLOGIES ET TECHNIQUES DE
POSITIONNEMENT
2.1 Introduction
Pour faire référence à un système
permettant de déterminer l'emplacement d'un objet, on emploie le terme
« localisation ».
Un système de positionnement compromet sur une
infrastructure un ensemble de capteurs permettant de prendre les informations
nécessaires. Ces informations sont transmises à une partie
intelligente permettant de traiter les données obtenues et d'extraire
l'information utile pour déterminer la position.
Il faut être capable de placer un objet dans un plan
bidimensionnel (latitude, longitude) ou tridimensionnel (latitude, longitude,
altitude) pour pouvoir le situer dans l'espace.
2.2 Technologies de positionnement
À présent, il existe plusieurs types de
technologies de positionnement qui peuvent être utilisées pour
déterminer la position des utilisateurs, comme les réseaux
cellulaires, en particulier le GSM et l'UMTS, les réseaux WLAN tel que
le Wifi ainsi que les réseaux WPAN, à savoir l'UWB et le
Bluetooth, l'infrarouge, l'ultrason, etc.
2.2.1 Systèmes de positionnement
radio
Un signal radio est une onde électromagnétique
qui se déplace à la vitesse de la lumière. Correctement
codé, ce signal peut transporter de l'information. [11]
Pour établir une liaison radio, il faut un
émetteur et un récepteur. L'émetteur reçoit un
signal électrique qu'il transforme en signal
électromagnétique, lequel est conduit vers l'antenne. Ce dernier
retransmet le signal dans la nature où il peut être capté
par une ou plusieurs antennes. En radio, le signal est propagé partout
et est donc susceptible d'être reçu par tout le monde. L'antenne
réceptrice conduit le signal reçu vers le récepteur.
Les technologies de positionnement les plus courantes sont
celles utilisant les ondes radio (satellitaire et terrestre).
29
2.2.1.1 Systèmes de positionnements basés sur les
satellites
Dans ces systèmes l'objet mobile est localisé
à l'aide de récepteurs des signaux satellitaires. Du fait que les
satellites couvrent d'énormes zones géographiques, le
positionnement par satellites peut déterminer l'emplacement d'une cible
sur un continent tout entier, voire le monde entier. [12] On peut citer le
système américain GPS, le système européen GALILEO
et le système russe GLONASS.
a. Système GPS
Aujourd'hui, le système GPS ou Global Positioning
System domine le monde de la localisation en espace libre. Il a
été développé par le Département de la
Défense des Etats-Unis au début des années 70 pour des
applications militaires. L'objectif étant de permettre aux combattants
de déterminer leur position sur le terrain avec une haute
précision.
Cette technologie comporte trois sous-ensembles:
? le segment spatial comportant les satellites,
? le segment utilisateur composé du système de
réception
? et le segment de contrôle qui assure la synchronisation
entre les satellites.
Le principe de base du positionnement par satellite repose
sur la trilatération spatiale. L'observation des signaux provenant des
satellites permet de mesurer la distance entre le mobile et chacun des
satellites observés. Connaissant la position de chaque satellite dans
l'espace, on peut calculer la position du mobile. [12]
Le système GPS fonctionne avec au moins 24 satellites
et permet ainsi une couverture mondiale. Les satellites sont pourvus d'horloges
très précises leur permettant de maintenir une synchronisation
avec une dérive maximale de 3 ns. Pour obtenir une visibilité, au
moins quatre satellites sont nécessaires dans la méthode de
localisation, à tout moment, partout dans le monde, la constellation
comporte six plans orbitaux, chaque plan contenant quatre satellites. Les
satellites se trouvent sur des trajectoires quasi-circulaires à une
distance d'environ 20200 Km de la surface de la Terre.
b. Système GLONASS
GLONASS ou GLObal NAvigation Satellite System est un
système satellitaire Russe, lancé durant la guerre froide pour
concurrencer les projets américains. Il fut lui aussi
opérationnel en 1995 avec
30
24 satellites en orbite. Le système est fonctionnel
mais, de fait, moins utilisé que le système GPS. [13]
L'intérêt de ce système de navigation demeure
en sa robustesse aux interférences. Chaque satellite retransmet sur sa
propre fréquence. Les satellites dégagent une plus grande
région du globe. La principale imperfection de GLONASS est qu'il est
à peine entretenu. L'entretien des satellites est très
onéreux alors que les autorités russes manquent de moyens
financiers. A présent seulement 07 satellites sur les 24 sont actifs.
c. EGNOS et GALILEO
EGNOS ou European Geostationary Navigation Overlay Service
est un projet complétant les systèmes GPS, et le système
GLONASS en utilisant le système du GPS différentiel.
Financé par l'Europe, ce projet a vu le jour en 1998 et devenu
opérationnel depuis 2009. [13]
GALILEO est un système de positionnement par
satellites, similaire à GPS ou GLONASS. Il a été
lancé en 2001 par un ensemble d'organismes publics et privés
principalement européens. [13]
d. Faiblesses et inconvénients du système de
positionnement par satellite
Néanmoins, un positionnement par satellite connait
quelques faiblesses et inconvénients :
· La visibilité des satellites n'est pas toujours
faisable, au fond d'une vallée ou dans un bâtiment,
· La topologie des satellites n'est pas toujours
parfaite, perte de précision, de position,
· L'ionosphère et le Troposphère
brouillent les signaux radios, Il présente aussi quelques erreurs tels
que :
· Les erreurs d'horloge atomique
· Les erreurs d'orbites,
· Les erreurs intentionnelles, par exemple, en cas de
guerre ou par mesure de représailles sur une zone géographique
donnée.
2.2.1.2 Systèmes de positionnement par la
télévision Numérique terrestre
La télédiffusion numérique terrestre ou
TNT est l'une des meilleures prétendantes pour la localisation. Le
niveau des signaux de télévision numérique est
incomparable à ceux du GPS, d'une quarantaine de décibels dans
les environnements difficiles. Les signaux ne sont pas affectés par
l'effet Doppler de l'émetteur (les stations de base étant fixes
et donc de position connue) et il n'y a
31
plus d'effets dus à la traversée de
l'ionosphère. Ces signaux de synchronisation n'endurent pas autant de
perturbations que les signaux GPS. La propagation des signaux TV connaissant
des fréquences faibles (470-870 MHz) est bien adaptée aux
environnements urbains.
Les avantages de ce moyen de localisation par rapport au GPS
sont [12] :
· Les signaux sont émis à partir d'antennes
de positions connues.
· Les signaux émis sont dimensionnés pour
qu'une antenne TV se trouvant à l'intérieur d'un bâtiment
puisse les recevoir.
· La distance séparant un récepteur d'un
émetteur est comprise entre 25 à 75 km.
· Le positionnement peut être effectué avec
un seul des signaux TV parmi les nombreux signaux disponibles émis par
une station de base.
· La bande des signaux est de 6 à 8 MHz et toute
cette bande est disponible pour faire de la localisation. De ce fait, la
précision temporelle est plus importante que celle du GPS.
· ROSUM exploite les mesures du temps d'arrivée
des signaux (identique à celle du GPS) captés d'au moins trois
émetteurs TV différents.
2.2.1.3 Systèmes de positionnement basés sur les
réseaux cellulaires
L'exploitation des réseaux cellulaires permet aussi
d'avoir une estimation de la position des équipements mobiles.
L'implémentation de méthodes de localisation cellulaire demande
des modifications logicielles ou/et matérielles au niveau de l'objet
mobile ou/et du réseau. Ainsi, on peut classer les technologies [14]:
· Exogènes : modifications au niveau du
réseau cellulaire;
· Endogène : modifications au niveau de l'objet
mobile;
· Hybrides: modifications sur l'ensemble.
Dans le cas de l'approche exogène, une ou plusieurs
stations de base effectuent les mesures nécessaires, appliquent certains
algorithmes pour déterminer la position de l'objet mobile et renvoient
les résultats à l'objet mobile.
Dans celui de l'approche endogène, donne naissance
à deux types d'implémentation :
· Mobile based: l'objet mobile effectue les mesures et
les calculs nécessaires pour déterminer sa position. Un avantage
de cette approche est le positionnement en mode inactif, réalisé
par la mesure de canaux de contrôle qui sont transmis constamment. Cette
méthode requiert des modifications de type matériel et logiciel
au niveau de l'équipement mobile. [14]
32
? Mobile assisted : l'objet mobile effectue les mesures et les
envoie à un centre de gestion qui va effectuer les calculs. Ce type
d'implémentation nécessite plutôt des modifications de type
logiciel. [14]
La méthode la plus simple de localisation cellulaire
est basée sur l'identification de la cellule (figure 2.01) dans laquelle
se trouve l'objet mobile.
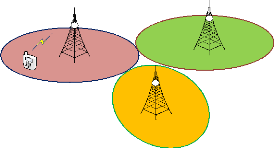
Figure 2.01 : Principe de la méthode
Cell ID
Dans cette figure, il y a 03 cellules distinctes et la station
mobile se trouve dans la cellule coloré en rose. Cette méthode
consiste à identifier au niveau du réseau la cellule dans
laquelle l'objet mobile se trouve et lui transmettre la position connue de la
station de base qui desservit la cellule. Un avantage de cette méthode
est représenté par le fait qu'aucun calcul n'est utilisé
pour déterminer la position, la méthode est ainsi très
rapide. L'inconvénient majeur est lié au fait que la
précision de cette technique est directement proportionnelle à la
dimension de chaque cellule qui peut varier entre 2 et 20 km, en fonction de la
densité des obstacles présents dans l'environnement et le nombre
d'utilisateurs desservis.
2.2.1.4 Systèmes de positionnement par les réseaux
locaux WLAN
Le positionnement à l'aide de la technologie Wi-Fi est
nommé WPS pour Wi-Fi Positionning System. Par rapport au GPS, le WPS
modifie l'infrastructure des satellites par les infrastructures radios des
réseaux Wi-Fi et dispose de plusieurs avantages [12]:
? Sa couverture intérieure et extérieure, lui
permet, contrairement au GPS, de continuer à fournir un positionnement
relativement précis en indoor et dans certaines zones urbaines denses
avec des effets de canyon urbain. La technologie fournit toujours les
meilleurs
33
résultats dans un environnement particulièrement
dense, en raison de la multiplication des points d'accès.
? Il n'implique pas de matériel supplémentaire,
l'équipement Wi-Fi étant déjà présent au
sein des différents appareils de communication.
Toutefois, Il présente des inconvénients [12] :
? WPS pose un problème de couverture en environnement
rural ou dans des zones peu équipées en points d'accès
Wi-Fi
? Les points d'accès Wi-Fi sont des récepteurs
plus mobiles que les infrastructures GPS, ce qui peut fausser les calculs si
les bases de données ne sont pas mises à jour
régulièrement.
2.2.1.5 Systèmes de positionnement par les réseaux
personnels WPAN
Les réseaux personnels sans fil WPAN ou Wireless
Personal Area Network sont des réseaux sans fil de faible portée
(courte distance), de l'ordre de quelques mètres. Ces réseaux
peuvent aussi être utilisés pour le positionnement d'un mobile.
a. Bluetooth
Bluetooth est une technologie radio destinée à
simplifier les connexions entre les appareils électroniques et
basé sur le standard IEEE ou Institute of Electrical and Electronics
Engineers 802.15.1.
Dans un système de positionnement par Bluetooth, les
serveurs sont situés dans une zone où la position d'un poste
client doit être estimée. Ces serveurs sont programmés pour
donner les coordonnées de la position d'un client demandeur. Les
périphériques Bluetooth qui ne disposent pas de programmation
particulière pour gérer une demande de positionnement peuvent
également être utilisés.
La méthode de positionnement suppose que si une
connexion est faite, le client demandeur se trouve dans les 10 mètres du
serveur. Une grande précision est obtenue lorsqu'un client
établit une connexion avec deux ou plusieurs serveurs de positionnement.
[12]
b. UWB
L'ultra large bande UWB ou Ultra Wide Band est une technologie
émergente dont les avantages en termes de localisation sont
agréables. Il est basé sur le standard IEEE 802.15.3. Les
techniques de localisation associées sont souvent basées sur les
techniques temporelles.
34
c. Zigbee
Le ZigBee est apparu après les technologies Bluetooth
et WiFi. Il basé sur le standard IEEE 802.15.4 qui est un protocole de
communication employé dans les réseaux sans fil personnels
(LRWPAN pour Low Rate Wireless Personal Area Network ou LP-WPAN pour Low Power
Wireless Personal Area Network) du fait de leur faible consommation, de leur
faible portée et du faible débit de leurs dispositifs.
Un système de positionnement par ZigBee comprend deux
catégories de nodes (noeuds): le node de référence et le
node à positionner (node aveugle, également connu par le node
mobile). Le node de référence qui a une position statique doit
être configurée avec les valeurs X1 et Y1 qui
correspondent à une position physique. La tâche principale du node
de référence est de fournir un paquet d'informations qui contient
les coordonnées X1 et Y1 pour le node mobile. [12]
Le node mobile va communiquer avec les nodes de
référence voisins, pour la collecte des X1, Y1
et les valeurs RSSI de chacun de ces nodes, et calculer sa position X, Y
à base des paramètres d'entrée en utilisant le
matériel de localisation. Ensuite, la position calculée doit
être envoyée à une station de contrôle. Cette station
de contrôle pourrait être un PC ou un autre node dans le
système. [12]
2.2.1.6 Systèmes de positionnement par RFID
La technologie RFID ou Radio-Frequency IDentification a
débuté pendant la seconde guerre mondiale. Il s'agit d'une
méthode destinée à enregistrer et récupérer
des données à distance grâce à des marqueurs
nommés «radio-étiquette» (ou RFID tag). Elles sont
équipées d'une antenne et d'une puce électronique. Ces
puces possèdent un identifiant et doivent être
détectées grâce à un lecteur RFID. L'identifiant est
ensuite assimilé à une zone géographique. Les
étiquettes utilisées sont de petits objets comme des
étiquettes autoadhésives. Elles peuvent aisément
être incorporées à des produits et des organismes
vivants.
2.2.2 Systèmes de positionnement non radio
2.2.2.1 Infrarouge
Comme la lumière visible, le signal infrarouge ne peut
pas franchir des murs ou des obstacles. Il a une portée limitée
dans les environnements indoor. Le système Active Badge,
élaboré entre 1989 et 1992, est l'un des premiers systèmes
de localisation en indoor. Il exploite la technologie infrarouge. Le mobile
à localiser est pourvu d'un tag infrarouge émettant un signal
toutes les 10 secondes. Les
35
récepteurs sont placés au plafond dans chaque
pièce de l'environnement. Ces récepteurs sont reliés entre
eux pour établir un réseau permettant de repérer le tag
actif.
a. Limite de l'infrarouge
La présence de la lumière du jour est un frein
au développement de cette technologie, car cette lumière perturbe
la transmission infrarouge entre l'émetteur et le récepteur. La
faible portée (environ 5 mètres) et le coût
élevé des capteurs ont rapidement dévié les
recherches vers d'autres technologies. [12]
2.2.2.2 Ultrason
Les systèmes à ultrason sont utilisés
pour déterminer la position d'un mobile. Ils sont combinés avec
une autre technologie afin d'obtenir une estimation de la distance
émetteur/récepteur. [15]
L'ultrason fonctionne en basse fréquence (40 kilohertz
typiques). Il possède une bonne précision. Les atouts des
dispositifs ultrason sont leur simplicité et leur faible coût.
L'ultrason ne perce pas les murs mais se réfléchis sur la plupart
des obstacles en indoor. La portée est comprise entre 3m et 10m.
Cependant, l'influence de la température peut affecter les performances
de ce type de système de positionnement.
2.2.2.3 Vidéo/images
La vidéo et les dispositifs recevant des images d'une
scène permettent d'effectuer d'une part une détection de la
présence d'un élément dans une scène, mais aussi de
localiser cet élément dans la scène. La localisation est
effectuée grâce à des transformations entre l'image de la
scène et les angles de vues de la caméra. Une utilisation
possible de cette technique est de détecter les intrusions dans une
zone. Grâce aux techniques de reconnaissance de contours, un objet est
repérable sur une image. Il est possible de suivre le déplacement
de ce contour tant qu'il reste dans le champ de vision de la caméra.
[15]
2.2.2.4 Champ magnétique
L'exploitation d'un réseau de capteurs émettant
un champ magnétique par l'intermédiaire de rails présents
dans le sol a été effectuée. À l'origine, ces
systèmes étaient prévus pour le guidage d'objets dans des
entrepôts, où des robots effectuaient de nombreux parcours pour
aller rechercher des pièces. [12]
36
Un autre domaine d'application est la capture de mouvements
(enregistrement des mouvements effectués par une personne afin de les
réintroduire dans une séance cinématographique). Le
système exige à ce que des émetteurs se trouvent à
des emplacements connus à travers le bâtiment. Chacun de ces
éléments émet un champ magnétique en permanence.
Une séquence PN ou Pseudo Noise rythme les émissions en changeant
la polarité du signal émis. Cette séquence PN distingue
les éléments entre eux. Le mobile qui se déplace dans le
bâtiment capte successivement différents signaux, et donne le
champ magnétique.
À l'aide d'un système basé sur la
corrélation, le récepteur détermine la puissance du signal
en provenance de chacun des émetteurs. Cette information de puissance du
signal est utilisée pour déterminer la position occupée
par le mobile. Le système exploite une estimation de la réponse
impulsionnelle du canal. [12]
2.3 Techniques de positionnement
Avec les systèmes cités
précédemment, les techniques de localisation les plus
étudiées sont les techniques basées sur l'estimation : des
temps d'arrivée TOA ou Time Of Arrival, des différences des temps
d'arrivée TDOA ou Time Difference Of Arrival, des angles
d'arrivée AOA ou Angle Of Arrival, et des puissances des signaux
reçus RSS ou Received Signal Strength. Elles sont classifiées
selon les mesures (métriques) utilisées. Toutes ces
méthodes dépendent de l'émission ou de la réception
des signaux radio pour déterminer la position d'un objet sur lequel un
récepteur radioélectrique ou un transducteur est lié.
2.3.1 Métriques de
positionnement
On distingue quelques métriques de positionnements tels
que l'angle d'arrivée, le temps d'arrivée, la différence
de temps d'arrivée, la puissance reçue et le déphasage
entre les ondes. [15]
2.3.1.1 Méthode basées sur des mesures
temporelles
La distance entre les noeuds peut être
évaluée à partir du temps de propagation d'un signal ou
d'un paquet. 02, approches principales peuvent être définies pour
ces méthodes : l'heure d'arrivée (TOA) et la différence de
temps d'arrivée (TDOA).
37
a. Heure d'arrivée - Time of Arrival
Quand des noeuds sont synchronisés, un seul paquet
allé simple est nécessaire (si l'environnement radio n'est pas
trop perturbé) pour connaître le temps de propagation et estimer
la distance entre les noeuds.
Le système GPS emploie cette méthode pour
fournir des informations de position aux utilisateurs. Toutefois, si des noeuds
ne sont pas synchronisés, deux paquets doivent être
utilisés pour estimer le temps aller-retour du signal entre les noeuds.
Les radars civils et militaires ou encore GPS-free utilisent cette approche.
Les méthodes de localisation basées sur UWB ou Ultra Wide Band
utilisent elles aussi le TOA. [15]
Le TOA possède quelques avantages :
· Paramètres bien estimés ;
· Algorithme de positionnement simple ;
· Précision plus élevée en milieu
confiné. Les principaux inconvénients du TOA sont :
· Synchronisation d'horloge indispensable entre le mobile
et les stations de base;
· Besoin d'avoir le trajet direct ;
· Nécessité d'une résolution
temporelle élevée au récepteur.
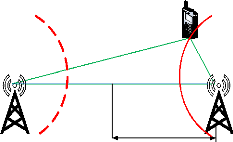
b. Différence de Temps d'Arrivée - Time
Difference of Arrival
Une deuxième approche (illustré par la figure
2.02) consiste à évaluer la différence des temps
d'arrivée de deux différents signaux. Ces signaux peuvent
provenir de deux noeuds de référence distincts (a) ou peuvent
être de natures différentes, comme les ultrasons et les signaux
radio qui peuvent être émis par une même source (b).
Plusieurs articles traitent de cette thématique comme dans l'approche
Active Bat. Néanmoins, les ultrasons ne peuvent être
utilisés qu'à l'intérieur d'un bâtiment, une
pièce, un hall. En raison de leurs limitations physiques du fait de la
réduction du rayon de propagation, le faible pouvoir
pénétrateur des obstacles et la faible résistance aux
interférences provenant d'autres sources d'ultrasons, l'utilisation
d'une telle technologie. Tout cela limite grandement le cadre d'utilisation
d'une telle technologie. [15]

??? ???
38
(a) (b)
Figure 2.02 : Temps différentiel
d'arrivée.
Le TDOA possède quelques avantages :
· Paramètres bien estimés ;
· Algorithme de positionnement simple ;
· Précision plus élevée en milieu
confiné ;
· Pas besoin de synchronisation d'horloge entre le mobile
et les stations de base. Les inconvénients du TDOA sont:
· Nécessité d'avoir le trajet direct ;
· Synchronisation d'horloge nécessaire entre les
paires de stations de base ;
· Nécessité d'une résolution
temporelle élevée au récepteur.
2.3.1.2 Phase Difference of Arrival
Pour les systèmes en bande étroite, si on
envisage des techniques interférométriques, cela implique
nécessairement l'exploitation de la différence de phase ?? ????
entre deux récepteurs d'indices j et ??. Au moins deux paires
d'antennes, équipées de récepteurs
hétérodynes, fournissent un déphasage proportionnel au
cosinus des angles d'azimut et d'élévation du front d'onde. Les
antennes de chaque paire sont séparées d'une distance connue sous
le nom de base de l'interféromètre. Le même principe
d'intersection d'hyperboles que dans le cas de la TDOA conduit à
l'estimation de la position de l'objet mobile.
La base de l'interféromètre influence la
précision des mesures, les alternatives étant de disposer d'une
distance importante en basses fréquences (solution adoptée dans
les applications liées à l'astronomie) ou travailler à des
fréquences élevées. Les applications de localisation,
réalisées en hautes fréquences, sont spécifiques
à des courtes et moyennes distances. La solution obtenue n'est pas
unique, des systèmes complémentaires de développement de
phase (unwrapping) sont
39
nécessaires afin de lever l'ambigüité. Ceci
constitue un des principaux inconvénients de cette technique. [14]
2.3.1.3 Méthode basées sur la direction
d'arrivée d'onde
Cette technique est basée sur l'exploitation des
angles d'incidence des signaux émis par l'objet mobile au niveau d'au
moins deux points de réception. Cette technique est illustrée
dans la figure 2.03. L'estimation des angles d'arrivée se fait à
l'aide des antennes directives ou des réseaux d'antennes
utilisées conjointement avec des méthodes à haute
résolution. La position de l'émetteur est donnée par
l'intersection des droites passant par chaque récepteur et d'angle, les
AOA calculés par rapport à une référence
arbitraire. [15]
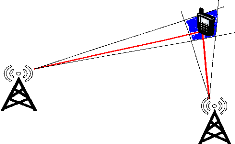
Figure 2.03 : Localisation exploitant les
AOA
L'AOA possède quelques avantages :
· Nécessite moins de stations de base fixes;
· Algorithme de positionnement simple. Les
inconvénients de l'AOA sont:
· Nécessite un trajet direct ;
· Coût d'implantation élevé ;
· Précision faible ;
· Mauvaise performance dans un canal ayant un profil de
propagation par trajets multiples sévère.
40
2.3.1.4 Exploitation de la puissance du signal reçus
En effet, la caractéristique physique du canal radio
nous renseigne sur la puissance du signal reçu RSS. Celle-ci
dépend de la puissance d'émission et de la distance qui
sépare l'émetteur au récepteur. A partir de
l'atténuation du signal, on peut obtenir la distance qui sépare
l'émetteur du destinataire. Un certain nombre de travaux estiment la
puissance moyenne d'un signal pour une distance donnée aussi bien que la
variabilité du signal. Mais dans un environnement bruité par un
grand nombre d'interférences, il est compliqué d'utiliser une
telle information. [12]
2.3.2 Évaluation de la position
2.3.2.1 Méthodes déterministes
Les méthodes déterministes s'appuient sur des
relations géométriques pour déterminer la position de la
station mobile en utilisant les coordonnées des stations de base qui
sont connues et les distances calculées à partir des
paramètres radio. Souvent, les stations de base, ainsi que le mobile,
sont situés dans un plan bidimensionnel (2D).
a. Angulation
Pour déterminer les coordonnées (XMs,
YMs) d'une station mobile (MS) en appliquant la méthode
d'angulation, au moins deux stations de base BS1 et BS2 sont
nécessaires, et leurs coordonnées (XBsK, YBsK) doivent
être connues, avec k E{1,2}. La seule information fournie par
les stations de base sont les angles tpk. [12]
En général, deux stations de base forment le
système d'équations suivant :
[
tantp1 - 11 ffXMs]l _ ff XBs1tantp1 -
YBs1l (2.01)
tantpp2 - 11
LYMsJ--LXBs2tantp2 - YBs2J avec
· tp1 : information fournie par la
station de base BS1
· tp2 : information fournie par la
station de base BS2
Dans le cas où tantp1 =
tantp2, les stations de base et la station mobile sont
situées sur la même ligne, et le système d'équations
est singulier.
Une station de base supplémentaire est
nécessaire pour déterminer les coordonnées de la station
mobile, mais elle ne doit pas être située sur la même ligne
que les deux autres stations de base utilisées initialement. [12]
b. 41
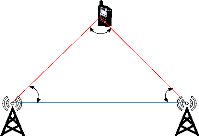
La triangulation
Une technique identique, généralement
désignée par `triangulation', peut être appliquée.
Elle ne nécessite que deux NR pour une localisation en 2D.
Cette méthode est basée sur la mesure de deux
angles d'un triangle et de l'un des côtés de ce triangle
indiquée dans la figure 2.04. En utilisant les propriétés
géométriques du triangle, on peut montrer que la position de
l'objet peut être obtenue comme suit :
d2 = d1 2 + d2 2 - 2d1d2 cos(8) (2.02)
{ ?? = ??1 + d1 cos(oc1)
Y = Y1 + d1 sin(oc1)
avec :
d : distance entre 02 stations de base
d1: distance entre mobile et station de base
d2 : distance entre mobile et station de base
oc : angle fournie par la station de base et la station mobile 8
: angle fournie par les deux stations de base
d1
è
d2
á1 á2
d
( X 1 , Y 1 ) ( X 2 , Y 2
)
Figure 2.04 : Estimation de position par
triangulation
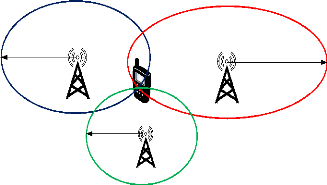
c. Latération circulaire
La `latération circulaire' est une méthode
fondée sur la distance de la station mobile à partir d'au moins
trois stations de base. Les cordonnées de ces derniers sont
supposées connues.
En effet, la trilatération est un procédé
de localisation relative d'un objet en utilisant les distances entre un minimum
de trois noeuds de référence (NR) pour une localisation en deux
dimensions.
42
Soient (x??, y??) les coordonnées cartésiennes
du ????è???? NR et (x; y). Les coordonnées de l'objet à
localiser un noeud mobile (NM). La position de cet objet est conquise par le
point d'intersection des trois cercles de centre NR1, NR2 et NR3 ayant
respectivement les rayons da, d?? et d??. Cette position
peut être déterminée par la résolution du
système d'équations suivant [16] :
{
(x1 - x)2 + (y1 - y)2 = da 2
(2.03)
(x2 - x)2 + (y2 - y)2 =
d??2 (x3 - x)2 + (y3 - y)2 = d?? 2 avec :
da : Rayon du cercle de centre NR1.
d?? : Rayon du cercle de centre NR2.
d?? : Rayon du cercle de centre NR3.
La figure 2.05 nous montre le principe de la localisation par
trilatération.
(X ,Y )
2 2
db (X 1,Y 1) da
NR
2
dc
(X 3 ,Y 3 )
NR
3
NR
1
Figure 2.05 : Estimation de la position par
trilatération
d. Latération hyperbolique
La `latération hyperbolique' est une méthode
permettant de déterminer l'emplacement de la station mobile à
l'aide des informations sur les différences de distances. Elle utilise
des hyperboles et non pas des cercles. La méthode des hyperboles repose
sur la différence entre les distances de l'objet à localiser aux
deux NR comme nous montre la figure 2.06 suivante :
d1
d2
(0,0)
d
43
Figure 2.06 : Méthode des hyperboles
La différence entre les distances ???? et ???? est
donnée par la formule ci-dessous [15] :
??? = ???? - ???? = v(??+ ??)2 +
??2?v(??? ??)2
+ ??2 (2.04)
Après quelques développements
mathématiques, on obtient l'équation d'une hyperbole à
partir de laquelle la position de l'objet est déterminée [15]:
|
??2
|
|
|
|
??2
|
|
(2.05)
|
|
|
|
|
|
|
|
|
|
?d2
|
|
|
|
4d2? ?d2
|
|
|
|
4
|
|
|
|
4
|
|
|
2.3.2.2 Méthodes probabilistes
Les méthodes probabilistes considèrent les
données disponibles sur l'emplacement de la station mobile comme des
fonctions de densité de probabilité. Cette approche est
adéquate lorsque la précision des données disponibles est
faible, ce qui est souvent le cas dans les problèmes de positionnement
de la station mobile.
Après avoir recueillies toutes les informations
disponibles sur les paramètres reliés à la position, les
fonctions de densité de probabilité correspondantes sont
liées à une seule fonction de densité de
probabilité qui décrit la position de la station mobile. Les
coordonnées de la station mobile sont évaluées comme une
variable aléatoire que possède la fonction de densité de
probabilité résultante. Par rapport aux méthodes
déterministes, les méthodes probabilistes sont de calculs
intensifs.
2.3.2.3 Méthodes par empreinte radio «
Fingerprinting»
À la différence des techniques
précédentes, cette technique requiert une étape de
calibration. Le mot fingerprinting vient du terme `fingerprint' qui signifie
empreinte digitale. Pour fonctionner, cette
44
technique nécessite une base de données qui,
à certaines positions de l'environnement considéré associe
un ensemble d'éléments caractérisant cette position. Ces
éléments doivent permettre de différencier chacune des
positions par rapport aux autres positions de l'environnement. Si cette
condition n'est pas réalisée, les éléments
considérés pour composer cette empreinte ne sont pas
significatifs. [12]
La méthode LFP ou Location Fingerprinting exploite les
réseaux radios existants, comme les réseaux cellulaires, ou les
WLANs. Elle profite des mesures génériques qui sont disponibles
à partir des interfaces radios permettant ainsi une localisation moins
coûteuse.
Le système de LFP comporte deux phases :
Tout d'abord, pendant une "phase d'apprentissage" (training
phase), une base de données radio est constituée sur la
région considérée.
Une fois que la base est construite, les mobiles peuvent
entrer dans la "phase de localisation" (localization phase). Ici, un mobile
fait des mesures de test, et sera localisé en associant ces mesures aux
éléments qui sont déjà enregistrés dans la
base.
Pour le cas des réseaux cellulaires, la méthode
de LFP permet une localisation plus précise que Cell-ID. La
méthode n'exige pas une grande consommation d'énergie, car elle
profite des mesures radios génériques qui se font
régulièrement au sein du terminal. [16]
2.4 Conclusion
Il existe plusieurs types de technologies de positionnement
qui peuvent être utilisés pour déterminer l'emplacement des
utilisateurs.
Ainsi, nous avons pu étudier les différentes
techniques de localisation qui sont classifiées selon les mesures
utilisées et dépendent de l'émission ou de la
réception des signaux radio.
45
| 

