II.3. Données 3-5 kHz
Les donnes 3-5 kHz sont des données acquises avec un
sondeur multifaisceaux dont la fréquence d'échantillonnage est
comprise entre 3 et 5 kHz. Ils sont un équivalent des données
« chirps ». La gamme de fréquences
d'échantillonnage d'un chirp varie entre 2 et 8 kHz. La
pénétration maximale pour ce type de données est de 100 m
environ avec résolution de l'ordre de mètre. Elles ont
été acquises lors des campagnes Prismed II, Nautinil, Vanil,
Mimes et Medeco. Ces données permettent d'imager les 100 premiers
mètres de sédiments sous le fond marin.
II.3.1 Traitements effectués dans le cadre de ce
stage
II.3.1.a Traitement et visualisation de la
bathymétrie et de l'imagerie
J'ai essentiellement utilisé caraïbes pour des
visualisations 3D de la bathymétrie, réalisation du plan de
position et vue de détails des données. Le traitement des
données bathymétriques a été effectué
à Géosciences Azur. Les principes de traitement sont
appelés en Annexe I.
II.3.1.b Importation et traitement des données 3-5
kHz
Lors de la campagne Medeco en novembre 2007, les
données 3-5 kHz ont été acquises grâce au logiciel
SUBOP. Les données ont été enregistrées au format
SEG rev1 standard. Une phase de traitement simple est appliquée sous
Matlab permettant entres autres :
- la lecture des données SEGY ;
- la corrélation avec le chirp émis ;
- la correction de divergence sphérique ;
- appliquer un gain linéaire à partir du fond de
l'eau ;
- la conversion en db de l'enveloppe du signal ;
- la compensation des mouvements de pilonnement ;
- l'application des délais d'enregistrement.
Précisons que ce prétraitement est
réalisé grâce à un ensemble de programmes
développés sous Matlab par Anne Paquaut (Ifremer). Ces programmes
permettent ;
- d'avoir une image des données qui peut être
enregistrée sous différents formats (jpeg, png, tiff, ...) et
imprimée ;
- d'enregistrer les données traitées au format SEGY
qui pourront être traitées de façon complémentaire
avec un logiciel comme le Seismic Unix (su) ou le Sisbise ;
- d'enregistrer les données de navigation au format
ascii.
Les données traitées sous Matlab montrent des
décalages des réflecteurs. Par la deuxième phase du
traitement, j'ai utilisé le logiciel Seimic Unix (su)
afin :
1- de corriger ce problème de décalage;
2- d'égaliser les amplitudes des traces;
3- d'appliquer un filtre amélirant la donnée ;
4- d'obtenir une image optimisée du profil.
5-
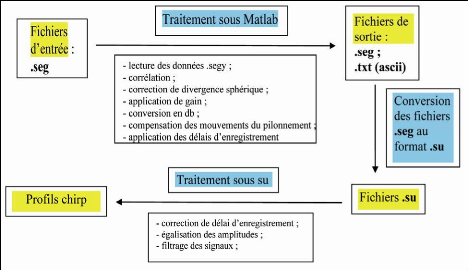
Figure 17: Schéma synthétique
avec différentes étapes de la chaîne
de traitement
appliquée aux données 3-5 kHz
Chapitre 3 : Processus sédimentaires récents : apports de
l'analyse des données multifaisceau et 3-5 kHz
|
| 

