|

redéfinition des noms chapitres spéciaux
CoNsERvAToiRE NATioNAL DEs ARTs ET METiERs
LABoRAToiRE DE
CALcuL SciENTiFiQuE
MEMOIRE D'INGENIEUR
EN INFORMATIQUE
Spécialité : Modélisation
Ingénierie Mathématique
par
Denis-Maxime BISSENGUE
CoNDiTioNs AuX LiMiTEs
TRANspARENTEs ET MoDELisATioN DEs
vAGuEs DE suRFAcE DANs uN
EcouLEMENT.
|
Rapport soutenu le : 11 Janvier 2012
devant le jury
composé de :
|
|
|
Mr.
|
PHiLippE DESTUYNDER
|
Professeur au C.N.A.M
|
(Président)
|
|
Mr.
|
THiERRy HORSIN
|
Professeur au C.N.A.M
|
(Membre)
|
|
Mr.
|
ALEXis HERAULT
|
Maître de conférence au C.N.A.M
|
(Membre)
|
|
Mr.
|
OLiviER WILK
|
Ingénieur au C.N.A.M
|
(Membre)
|
|
Mr.
|
THoMAs GAZZOLA
|
Ingénieur au BUREAU VERITAS
|
(Membre)
|
|
Mr.
|
SLiMANE AMARA
|
Ingénieur Université de Troyes
|
(Membre)
|
REMERCIEMENTS
M
Es premiers remerciements sont adressés à
Monsieur Philippe Destuynder, qui m'a accueilli au sein de la chaire de calcul
sci-
entifique m'a proposé ce mémoire d'ingénieur
et a dirigé mon travail. Je suis spécialement sensible à
la confiance qu'il a toujours eu en moi. J'exprime ma profonde gratitude aux
membres du jury, en particulier :
- messieurs Thierry Horsin et Alexis Herault qui ont
accepté de faire
parti du jury de ce travail,
- monsieur Thomas Gazzola du Bureau Veritas qui a bien voulu
s'associer au jury,
- monsieur Olivier Wilk dont l'aide amicale a été
un atout précieux tout au long de l'élaboration de ce memoire.
J'ai eu de la chance de bénéfier d'un
environnement de travail excep-
tionnel au laboratoire, je remercie particulièrement,
Janine Laurent , Christiane Morel, Aurélien Latouche ainsi que tous les
membres du département d'ingénierie mathématique.
Enfin, je ne peux en aucun cas oublier ma tendre épouse
et ma fille pour le soutien moral dont elles ont fait preuve au cours de mes
études, je remercie tout spécialement celle qui par son
abnégation et son dévouement a permis que ces études se
concrétisent.
Lieu, le 26 février 2012.
TABLE DEs MATièREs
|
1
2
|
Introduction
Les Modèles
2.1 MoDèLE DANs L'EAu
|
1
5
6
|
|
|
2.1.1 Hypothèses de petites pertubations
|
7
|
|
2.2
|
MoDèLE à LA suRFAcE
|
10
|
|
2.3
|
TRAiTEMENT DEs coNDiTioNs LiMiTEs Aux BoRDs
|
11
|
|
2.4
|
CoNDiTioNs Aux LiMiTEs TRANspARENTEs
|
13
|
|
|
2.4.1 Condition aux limites transparentes en dimension n =1 .
|
14
|
|
|
2.4.2 Condition aux limites transparente en dimension n=2; 3 .
|
24
|
|
|
2.4.3 Conclusion
|
28
|
|
3
|
Propriétés des modèles
|
31
|
|
3.1
|
FoRMuLATioN vARiATioNNELLE
|
31
|
|
|
3.1.1 Formulation variationnelle du modèle
Hydroacoustique
|
|
|
|
avec écoulement
|
31
|
|
|
3.1.2 Formulation variationnelle du modèle de vagues . . .
.
|
38
|
|
|
3.1.3 Stabilité du modèle
|
41
|
|
|
3.1.4 Existence et unicité d'une solution
|
43
|
|
|
3.1.5 Conclusion
|
48
|
|
4
|
Schémas numériques
|
49
|
|
4.1
|
MAiLLAgE
|
49
|
|
|
4.1.1 Description du logiciel Gmsh
|
50
|
|
|
4.1.2 Présentation du logiciel Getfem + +
|
51
|
|
4.2
|
DiscRéTisATioN EN EspAcE
|
51
|
|
4.3
|
DiscRéTisATioN EN TEMps
|
54
|
|
4.4
|
ETuDE DE LA sTABiLiTé Du schéMA
D'iNTégRATioN EN TEMps
|
54
|
|
5
|
Expériences numériques
|
57
|
|
|
5.0.1 Solution stationnaire
|
58
|
|
|
5.0.2 Frontières adaptées
|
60
|
|
|
5.0.3 Conclusion
|
62
|
|
6
|
Résultats numériques
|
63
|
|
|
6.0.4 Modèle sans couplage avec les vagues
|
64
|
|
|
6.0.5 Résultats numériques
|
64
|
|
|
6.0.6 Conclusion
|
69
|
|
|
6.0.7 Modèle avec couplage avec les vagues
|
70
|
|
|
6.0.8 Résultats numériques
|
71
|
|
|
6.0.9 Stabilité du modèle
|
87
|
7 Conclusion et perspectives 89
8 Annexe 91
8.1 RAPPEL DEs OUTILs MATHéMATIQUEs 91
8.2 EQUATIONs DE LA MécANIQUE DEs FLUIDEs 95
LIsTE DEs FIGUREs
2.1 Modèle. 5
2.2 Equilibre d'une colonne d'eau à la surface. 10
2.3 Représentation des quantités
caractéristiques au travers des frontières ouvertes. 16
3.1 les équipotentielles sont orthogonales aux lignes de
courant. 36
5.1 Résultat avec stucture symétrique : une ellipse
. 59
5.2 Résultat avec stucture non symétrique :un
sous-marin. . . 60
5.3 Exemple d'iso-potentiel pour U= 0.01m.s-1. 60
5.4 Maillage du domaine découpé avec une ellipse
à l'intérieur 61
5.5 Maillage du domaine découpé avec un sous-marin
à l'intérieur. 62
6.1 Schema de fonctionnement 63
6.2 Step 1-2 :Ecoulement transitiore, avec condition aux
limites
transparentes sur les frontières latérales.
65
6.3 Step 3-4 :Ecoulement transitiore, avec condition aux limites
transparentes sur les frontières latérales.
65
6.4 Step 5-6 :Ecoulement transitiore, avec condition aux limites
transparentes sur les frontières latérales.
65
6.5 Step 7-8 :Ecoulement transitiore, avec condition aux limites
transparentes sur les frontières latérales.
65
6.6 Step 9-10 :Ecoulement transitiore, avec condition aux limites
transparentes sur les frontières latérales.
66
6.7 Step 11-12 :Ecoulement transitiore, avec condition aux lim-
ites transparentes sur les frontières latérales.
66
6.8 Step 13-14 :Ecoulement transitiore, avec condition aux lim-
ites transparentes sur les frontières latérales.
66
6.9 Step 15-16 :Ecoulement transitiore, avec condition aux lim-
ites transparentes sur les frontières latérales.
67
6.10 Step 17-18 :Ecoulement transitiore, avec condition aux lim-
ites transparentes sur les frontières latérales.
67
6.11 Step 19-20 :Ecoulement transitiore, avec condition aux lim-
ites transparentes sur les frontières latérales.
67
6.12 Step 21-22 :Ecoulement transitiore, avec condition aux lim-
ites transparentes sur les frontières latérales.
68
6.13 Step 23-24 :Ecoulement transitiore, avec condition
aux lim-
ites transparentes sur les frontières latérales.
68
6.14 Step 25-26 :Ecoulement transitiore, avec condition aux lim-
ites transparentes sur les frontières latérales.
68
6.15 Step 27-28 :Ecoulement transitiore, avec condition aux lim-
ites transparentes sur les frontières latérales.
68
6.16 Step 29-30 :Ecoulement transitiore, avec condition aux lim-
ites transparentes sur les frontières latérales.
69
6.17 Step 31-32 :Ecoulement transitiore, avec condition aux lim-
ites transparentes sur les frontières latérales.
69
6.18 Step 33-34 :Ecoulement transitiore, avec condition aux lim-
ites transparentes sur les frontières latérales.
69
6.19 Step 1-2 : couplage avec les vagues 71
6.20 Step 3-4 : couplage avec les vagues 71
6.21 Step 5-6 : couplage avec les vagues 72
6.22 Step 7-8 : couplage avec les vagues 72
6.23 Step 9-10 : couplage avec les vagues 72
6.24 Step 7-8 : couplage avec les vagues 72
6.25 Step 13-14 : couplage avec les vagues 73
6.26 Step 15-16 : couplage avec les vagues 73
6.27 Step 17-18 : couplage avec les vagues 73
6.28 Step 9-10 : couplage avec les vagues 73
6.29 Step 21-22 : couplage avec les vagues 74
6.30 Step 11-12 : couplage avec les vagues 74
6.31 Step 13-14 : couplage avec les vagues 74
6.32 Step 15-16 : couplage avec les vagues 74
6.33 Step 29-30 : couplage avec les vagues 75
6.34 Step 31-32 : couplage avec les vagues 75
6.35 Step 17-18 : couplage avec les vagues 75
6.36 Step 19-20 : couplage avec les vagues 75
6.37 Step 37-38 : couplage avec les vagues 76
6.38 Step 21-22 : couplage avec les vagues 76
6.39 Step 23-24 : couplage avec les vagues 76
6.40 Step 43-44 : couplage avec les vagues 76
6.41 Step 25-26 : couplage avec les vagues 77
6.42 Step 27-28 : couplage avec les vagues 77
6.43 Step 29-30 : couplage avec les vagues 77
6.44 Step 29-30 : couplage avec les vagues 77
6.45 Courbe des valeurs propres en fonction des vitesses 79
6.46 Step 1-2 : couplage avec les vagues 80
6.47 Step 3-4 : couplage avec les vagues 80
6.48 Step 5-6 : couplage avec les vagues 80
6.49 Step 7-8 : couplage avec les vagues 81
6.50 Step 7-8 : couplage avec les vagues 81
6.51 Step 11-12 : couplage avec les vagues 81
6.52 Step 9-10 : couplage avec les vagues 81
6.53 Step 15-16 : couplage avec les vagues 82
6.54 Step 17-18 : couplage avec les vagues 82
6.55 Step 11-12 : couplage avec les vagues 82
6.56 Step 21-22 : couplage avec les vagues 82
6.57 Step 13-14 : couplage avec les vagues 83
6.58 Step 25-26 : couplage avec les vagues 83
6.59 Step 15-16 : couplage avec les vagues 83
6.60 Step 29-30 : couplage avec les vagues 83
6.61 Step 31-32 : couplage avec les vagues 84
6.62 Step 17-18 : couplage avec les vagues 84
6.63 Step 19-20 : couplage avec les vagues 84
6.64 Step 37-38 : couplage avec les vagues 84
6.65 Step 21-22 : couplage avec les vagues 85
6.66 Step 41-42 : couplage avec les vagues 85
6.67 Step 23-24 : couplage avec les vagues 85
6.68 Step 45-46 : couplage avec les vagues 85
6.69 Step 25-26 : couplage avec les vagues 86
6.70 Step 49-50 : couplage avec les vagues 86
6.71 Courbe des valeurs propres en fonction des vitesses 87
1
INTRODUCTION
L
ES VAGUES et la mer en général, ont toujours
exercé un mystérieux attrait sur les hommes. Et malgré
cette apparente monotonie, nous
avons beaucoup de mal à comprendre leur naissance et leur
évolution. Ainsi le mécanisme de vague s'est progressivement
laissé découvrir ce dernier siècle après
d'instantes recherches faites de façon complémentaire par les
physiciens et les mathématiciens qui se sont succédés
jusqu'à nos jours. Ces derniers ont montré que c'est l'action du
vent à la surface de l'eau qui est responsable de la formation de ces
vagues obéissant aux mêmes règles depuis des
millénaires interpellant navigateurs et chercheurs.
Une vague est une onde mécanique qui se propage
à la surface de l'eau entre deux fluides en l'occurence l'eau et
l'air.
Depuis les travaux de Kelvin [1], de noubreuses contributions
et simulations numériques ont été publiées pour la
modélisation des vagues de surface. Dans la plupart d'entre eux, les
auteurs [3,4] considèrent que la capillarité est
négligeable par rapport aux forces en présence à la
surface de la mer.
Malheureusement, comme il a été souligné
dans les articles [9] et par d'autres auteurs[5], que le modèle est mal
posé dans le sens oil l'existence d'ondes à la surface de l'eau
est due d'une part à la pesanteur qui tend à maintenir
l'interface air-eau horizontale (ondes de gravité) et d'autre part
à la tension de surface qui tend à maintenir l'interface plane
(ondes capillaires).
Dans ce document, nous considérons d'une part un
écoulement capillaire possédant une surface libre dans un domaine
incluant un sous-marin et d'autre part, nous-nous intéressons à
la propagation acoustique dans ce domaine contenant l'eau en écoulement
uniforme et soumis à de petites perturbations autour d'un
écoulement moyen initial réalisant l'équilibre statique de
la surface libre.
Bien qu'étant à la base de la majorité
des modèles présents dans la littérature, l'étude
de la propagation acoustiques dans des écoulements reste un
problème d'actualité et difficile à appréhender
dont les principales applications se rencontent dans les secteurs de
l'industrie maritime et de l'aéronautique.
En se limitant au cadre de la propagation linéaire dans
un domaine con-tenant un sous-marin en présence d'un écoulement,
nous nous sommes proposé d'étudier l'acoustique sous-marine qui a
pour objet l'étude et l'utilisation de modèles
mathématiques décrivant la propagation des ondes acoustiques dans
la mer.
Pour le modèle de surface, il est connu que dans le
cadre linéaire simple des ondes progressives dans un domaine
borné modélisé par le modèle de Neumann-Kelvin des
instabilités numériques apparaissent. Ainsi, nous avons choisi de
prendre comme modèle d'ondes progressives à la surface de la mer,
le modèle traduisant l'équilibre de la surface libre en
présence de la tension superficielle et de la gravité.
Modèle défini dans l'article de Philippe Destuynder et Caroline
Fabre [9].
Par ailleurs, les problèmes de propagation d'ondes sont
souvent posés en domaine non borné et une des questions
importantes pour leur résolution numérique est de savoir borner
artificiellement le domaine de calcul. Afin de construire ces limites
articielles de sorte que le problème aux conditions initiales et aux
limites soit "bien-posé" et que les frontières latérales
du domaine soient "transparentes" vis-a-vis des ondes entrantes et sortantes,
B. Engquist et Majda (1977) ont mis au point une méthode
théorique pour rendre les limites transparentes à un niveau
d'approximation clairement défini.
Leur théorie générale de construction des
conditions transparentes s'appuie sur l'analyse modale des équations du
mouvement linéarisées autour d'un état de
référence et ré-écrites aux bords sous la forme
d'une condition qui peut en général s'exprimer à l'aide de
l'opérateur de DirichletNeumann. En générale, la forme de
cette opérateur n'est pas toujours commode (pratique), l'essentiel du
travail de construction des conditions transparentes consiste donc à
trouver une bonne approximation de ce dernier.
Dans ce travail, un autre thème important abordé
dans ce travail est celui du traitement des conditions aux limites non
réfléchissantes (ou transparentes) pour l'acoustique en
écoulement.
Celles-ci sont à la fois indispensables du fait du
caractère nécessairement borné du domaine de calcul et
cruciales pour l'obtention de résultats numériques pertinents.
Ces conditions transparentes doivent être en mesure de
simuler une condition de rayonnement à l'infini, tout en veillant
à ne pas créer de réflection aux frontières du
domaine de calcul.
Ce sujet reste aujourd'hui un important axe de recherche dans
l'étude et la simulation numérique de l'ensemble des
phénomènes de propagation d'ondes.
La méthode des équations intégrales qui
est utilisée par la plupart des codes de calcul industriels, ne permet
pas de traiter ces aspects de façon satisfaisante et nécessitent
des hypothèses simplificatrices incompatibles avec une
représentation réaliste des phénomènes physiques en
présences. Les difficultés sont multiples : d'une part le
modèle linéaire est naturellement instable et seul la
présence de termes non linéaires à la surface de l'eau
permet de la stabiliser et d'autre part, il apparait trois types d'ondes
couplés (ondes de gravité, ondes acoustiques et ondes de
capillarité ).
La grande disparité des vitesses d'ondes et de celle du
sous-marin conduisent à des difficultés numériques qu'il a
fallu surmonter en utilisant un schéma d'intégration en temps
adapté et qui ne dissimule pas l'un des phénomènes en
présence.
La pertinence de ce travail est justifiée en particulier
par la construction
3
d'un modèle de condition aux limites transparentes
évitant les réflexions d'ondes.
Ce mémoire s'articule autour de six chapitres suivant les
points d'étude précedemment évoqués.
Ainsi, dans le deuxième chapitre nous
définissons les modèles, présentons les lois physiques et
les principales hypothèses permettant d'aborder le problème et
nous donnons les équations gouvernant les écoulements
considéres.
Le principal résultat de ce chapitre est
l'écriture mathématique de la condition aux limites transparentes
sur les frontières représentant respectivement la section
d'entrée du fluide et la section de sortie du fluide. Cette condition
aux limites est obtenue et est valable seulement pour les frontières
planes perpendiculaires à la direction de l'écoulement.
Une validation numérique sur un cas test (dimension 1) de
cette condition aux limites est effectuée afin de vérifier
l'efficacité de la méthode.
Le troisième chapitre est consacré à
l'étude des différentes formulations variationnelles et au
modèle couplé fluide-vague à la surface. Pour cet
étude, nous-nous sommes intéressé à la
determination d'une nouvelle frontière du domaine.
Il s'agit de frontières adaptées évitant des
ondes tangentielles à la frontière qui diffracteraient.
Nous proposons aussi dans ce chapitre une étude du
système couplé approché obtenu afin d'établir des
résultats d'existence, d'unicité et de stabilité a
priori du modèle. Nous déduisons de cette étude qu'en
présence d'une capillarité, nous avons une vitisse critique,
vitesse au dessus de laquelle le modèle peut être instable.
Dans le quatrième chapitre, nous présentons les
logiciels et la méthode numérique utilisés. La
méthode numérique appropriée pour la prise en compte des
conditions aux limites que nous avions choisi est celle des
éléments finis.
Le cinquième et le sixième chapitres sont
consacrés à la vérification numériques de la
validité du modèle numérique présenté dans
le quatrième chapitre.
L
'ouvERt tridimensionnel sur lequel est posé le
problème d'écoulement sera noté Ù ?
R3. Il correspond à un bassin rempli d'eau
dans
lequel un corps immergé est animé d'un mouvement
rectiligne uniforme. Pour la mise en équation, on se placera dans le
référentiel lié au corps, cela revient à supposer
qu'il est fixe et soumis à un écoulement que l'on supposera
uniforme et irrotationel. La vitesse à l'infini amant est u.
Notons que la frontière de ce bassin est
partitionnée en cinq parties:
- une surface libre notée s,
- le fond du bassin que l'on note 0, est supposé
imperméable, - deux côtés latéraux 1 et 2 par
lesquels l'eau rentre et sort, - et b la surface arbitraire entourant
le corp immergé (un sous-marin)
et ne rencontrant pas la surface libre.
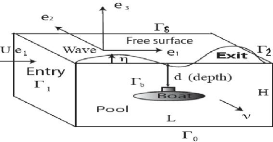
FiGuRE 2.1 - Modèle.
Afin de bien rendre compte de l'intéraction
fluide-modèle de vague, nous allons analyser séparément
les équations régissant le comportement du fluide dans le bassin
et celles qui régissent celui de la surface libre en prenant en compte
l'effet de la capillarité .
Ensuite, une formulation mathématique et physique des
conditions aux limites transparentes sera faite pour les frontières
latérales entrante 1 et sortante 2 .
Nous ferons des hypothèses classiques permettant de
construire un modèle sur lequel il est possible d'obtenir de nombreux
résultats opérationnels. On suppose que :
1. le fluide est parfait et compressible et il n'est soumis
qu'à des forces de gravité et de pression.
2. Le champ de vitesses u des particules fluides est
supposé irrotationnel :
rot(u) = 0,
et la circulation du champ de vitesses sur chaque composante
connexe de la frontière de l'ouvert occupé par le fluide est
supposée nulle.
Ceci permet d'assurer l'existence d'une fonction potentielle de
vitesses notée ö définie à une constante
additive près telle que :
u = Vö.
2.1 MoDèle DANs l'eAu
Etant donné ñe la masse
volumique de l'eau, le principe de conservation de la masse (2.7.1)
s'écrit :
?ñe
?t +
div(ñeVö) = 0 dans n×]0,
T[. (2.1)
L'équation traduisant le théorème de la
conservation de la quantité de mouvement s'écrit :
?u
ñe( ?t + uvu) =
ñeg - Grp dans n×]0, T[. (2.2)
Afin de simplifier cette relation et de trouver une
intégrale première, nous introduisons un potentiel de barotropie
notée F(ñe) et qui est défini
par : F(ñe) = fe ñe 1
?p 0 ñ ?ñe(ñe)dñ +
c(x), (2.3)
d'où
|
?F 1 ?p
rF(ñe) =
.rñe + rc = . ?ñe
(ñe).rñe
?ñe ñe
Vp
|
+Vc,
|
Par conséquent, le gradient de (2.3) est donné par
:
1
VF(ñe) =
.rp(ñe) + rc (2.4)
ñe
En négligeant la gravité dans (2.2), et en
tenant compte de l'hypothèse de fluide non visqueux, on obtient une
formulation plus simple de la relation fondamentale :
?ö 1
v ( ?t + 2
|Vö|2 + F(ñe)) =0
dans n×]0, T[. (2.5)
Et comme le potentiel des vitesses ö est
définie à une constante spatiale additive près, en
choisissant convenablement cette constante on obtient :
?ö +
?t 2 |Vö|2 +
F(ñe) = 0 dans n×]0, T[,
(2.6a)
1
2.1.1 Hypothèses de petites pertubations
Dans le cadre de la théorie linéaire de
l'acoustique, les pertubations (pour une particule donnée à un
instant donné) des quantités caractérisant
l'écoulement sont supposées suffisamment petites pour pouvoir
limiter au premier ordre les développements (en puissances d'un
paramètre caractéristique e, sans dimension, de l'ordre
de grandeur de la pertubation et petit devant l'unité) de ces
quantités autour de l'état non pertubé.
Cette hypothèse consiste donc à envisager des
mouvements de faible amplitude autour d'un état moyen défini par
un écoulement permanent représenté par le potentiel de
?0, solution du problème de Neumann:
|
? -A?0
|
= 0 dans 1, et R 1 ?0
|
= 0,
|
|
|
?????????
|
|
|
|
|
??0
|
= 0 sur F0 ? Fb ? Fs,
|
|
(2.7)
|
|
?í
|
|
?????????
??0
|
= u(e1, í) sur F1 ? F2.
|
|
|
|
?í
|
|
|
|
Dans ce système, u est l'amplitude de la vitesse
d'écoulement suivant la direction e1.
Et le champs de vitesse constant est donné par le gradient
de ?0.
D'autre part, pour des raisons de simplification, nous
supposons que ?0 est suffisament régulière et de classe
C°°(1) pour justifier les calculs dans la
suite.
Nous écrivons ensuite :
Equation traduisant la conservation de la
masse
La linéarisation de l'équation de continuité
(2.1) :
?ñe
ö(x, t) = ?0(x)
+ ?(x, t), ñe(x,
t) = ñ0 + ñ(x, t)
x ? R3,
?t + Vñe
·
Vö + ñeAö = 0 dans 1x]0,
T[.
autour de ?0 et ñ0 donne:
?ñ ?t + V?0
· Vñ
+ ñ0A? = 0 dans 1x]0, T[. (2.8)
|
d'ou :
|
?ñ
?t
|
= -V?0
· Vñ -
ñ0A? dans 1x]0, T[. (2.9)
|
Equation de conservation de la quantité de
mouvement
De même pour la deuxième équation du
système précédent, la linéarisation se fait en deux
étapes (cf :[10]).
- Etape 1 : On dérive par rapport au temps
l'équation (2.6a)
|
?2ö ?t2 +
|
1 ?t(|Vö|2) +
?F
? ?ñe (ñe)?ñe
?t = 0,
2
|
?F 1 ?p
?ñe (ñe) =
ñe ?ñe (ñe),
et on linéarise autour de l'état permanent :
?2? ?p
?t2 + r?0
·
r(?? ?t ) + 1 ?ñ0
(ñe)?ñ ?t = 0,
ñ0
ensuite, on remplace ?ñ par l'expression
précedente : ?t
?2, ?? 1 ?p ?p
?t; + V?0
· v( ?t
) - ñ0 ?ñe (ñ0)(V?0
· Vñ) - , (ñ0)6? =
0.
uñe
(2.10)
- Etape 2 : On applique l'opérateur
V?0V(
·) à l'équation (2.6a)
G?0
· V(?ö)
+ 1 (Gr?0
· V(|Vö|2)) +
(V?0
· V (F(ñe)) =0,
?t 2
comme
v(|vö|2) = 2V.(V?0
·
V?) et V(F(ñe) = 1 ?p
ñe ?ñe
(ñe).rñe,
alors
|
V?0
· V
(F(ñe) = ñ10
|
?p
?ñe
|
(ñ0).(V?0
·
Vñ).
|
On obtient alors la relation suivante :
r?0
· r.(?? ?t ) +
r?0
· r.(r?0
· r?)) + 1
?p
?ñe (ñ0).(rñ0
· rñ) = 0.
ñ0
(2.11) Et pour conclure, on additionne les deux relations
(2.10) et (2.11) ce qui donne alors l'équation des ondes :
?2?
?t2 + 2r?0
· r(??
?t ) + V?0
· V(V?0
· V?) - c2f6? = 0 dans
I/×]0, T[.
(2.12)
avec
?p
cf 2 = ?ñe (ñ0), vitesse
du son dans le fluide.
Modèle dans l'ouvert U.
|
- un écoulement stationnaire problème
stationnaire
? ????????? ?????????
|
: --Ä?0
??0
|
de potentiel de vitesse ?0 solution du
= 0 dans Ù,
= 0 sur 0 U b U s,
= u(e1, í) sur 1 U 2.
|
|
?í
??0
|
|
?í
|
Où ?0 est définie à constante
près, que nous fixons en prenant par exemple la condition de moyenne
nulle sur s :
Z
?0 = 0, s - et un
écoulement transitoire représenté par le potentiel ?
solution de :
?2?
?t2 +2V?0 .V.(?? ?t
)+V?0 .V(V?0 .V?)-- c2 f
Ä? = 0 dans Ùx]0, T[.
2.2 ModèLe à La suRFace
Dans cette partie, nous discutons d'une
propriété des interfaces entre un liquide et un gaz (air). Cette
interface joue un rôle très important dans l'équilibre et
l'écoulement des fluides, dès lors qu'ils ont des surfaces
libres et ne sont plus simplement en contact avec des parois
solides.
Sur la frontière s
représentant une surface libre perpendiculaire à la direction de
la gravité locale, nous avons l'équilibre local d'une colonne
d'eau au voisinage de cette surface (cf schéma ci-dessous).
En désignant par ?s la
frontière de s, et par ís
la normale unitaire sortante à s dans son plan le
long de ?s.
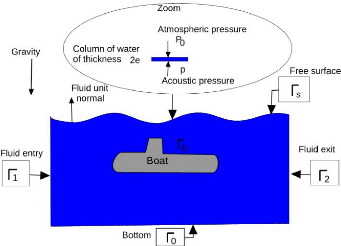
FiGuRe 2.2 - Equilibre d'une colonne d'eau à la
surface.
Nous notons par ç le déplacement normal
à s compté positivement suivant la normale
sortante à Ù.
Et nous désignons par:
1. p la pression du fluide qui est en dessous du milieu
considéré,
2. ó la constante de capillarité,
3. g l'accélération de la pesanteur .
L'équation d'équilibre local d'une colonne d'eau
d'épaisseur 2e soumise à la pression
atmosphérique P0 constante, à la pression de fluide et
à la tension capillaire de la surface s'écrit :
2åñ[?2ç
(2.13)
?t2 + . . .] = -P0 + p -
ñgç + ó ?
?s(?ç ?s ).
La pression du fluide p est définie par la
relation de Bernouilli :
après développement du terme :
(Vö)2 = (V?0 +
V?)2 = |V?0|2 + 2V?0
· V? + |V?|2, et comme :
?ö
ñe ?t
= (ñ0 + ñ) ?
?t(?0 + ?) = ñ0 ?? ?t ,
on obtient après substitution dans (2.14), l'expression
linéairisée de la pression :
|
??
p = -ñ0 ?t
|
ñ0V?0
· V? -
ñ02 |V?0|2. (2.15)
|
Et l'equation traduisant l'équilibre de la surface libre
devient (après avoir remplacer p par son expression
trouvée précédemment) :
?2ç ??
2åñ0 - MO +
poo + po at + povspo
·
vsp =-ñ0 | v ?0
|2.
?t2 2
En résumé : Sur la
frontière I's, le mouvement de la surface libre est
décrit par l'équation :
ate ??
2åñ0 ' MO + poo
+ po at + povspo
·
vsp = ñ0 |vs?0|2.
at2 2
(2.16)
2.3 TRAITEMENT DES CONDITIONS LIMITES AUX BORDS
Le traitement des conditions aux limites est la principale
difficulté dans les codes de calcul.
Un mauvais traitement de ces conditions limites peut mener
à des instabilités numériques causées par le
traitement des bords. Afin d'obtenir des résultats gouvernés par
la physique et non par les instabilités numériques, il est donc
important de recourir à une méthode de traitement des conditions
aux limites éfficaces.
Sur la surface libre I's
La condition aux limites qu'il faut adopter à
l'interface entre l'eau et l'air doit être formulée dans la
configuration physique instantanée en représentation eulerienne
et ensuite ramenée sur une configuration de référence
(représentation de Lagrange).
Pour cela, nous désignons par
í0 la normale à la frontière
déformée I's . Elle est différente de la
normale í dans le cas d'une rotation de la surface libre, ce
qui est le cas pour une vague.
Et le couplage entre la rotation de í et le
déplacement d'un point géométrique de la surface libre
notée ç conduit à des forces gyroscopiques.
Et un simple calcul de géométrie
différentielle permet d'exprimer au pre-
mier ordre la normale
í0 à la surface déformée en
fonction de í et Vsç :
í 0 = í -
Vsç
ou Vs est le
gradient surfacique, c'est-à-dire par rapport aux coordonnées
0
variants sur la frontière s. De ce
fait, la normale ín'est plus unitaire. Par ailleurs, la
continuité géométrique des déplacements à la
traversée de la surface s déformée
s'écrit donc au premier ordre :
?ç (vs(? +
?0) - ?t í)
· í0 =
0,
et
?ç
(rs? + rs?0 - ?t
í)
· (í - Vsç) = 0,
ce qui donne après développement
?ç ?ç ?ç
rs?
· í +
rs?0
· í - ?t -
rs?
· rsç
- rs?0
· rsç +
?t
· = 0,
?s
??0
et puisque : (s) = 0 sur s.
?í
?? = ?í
?ç
On obtient au premier ordre l'équation :
?t + Vs?0
·
Vsç, sur s. (2.17)
Cette équation traduit le couplage entre le potentiel de
vitesse de l'écoulement ? et le déplacement de la
surface libre ç.
Sur le fond du bassin noté 0
Nous supposons dans un premier temps que le fond de notre bassin
est étanche, dans ce cas la condition de non
pénétrabilité du fluide s'écrit :
??
= 0.
?í
Ensuite, une étude pratique d'une autre condition aux
limites sera faite dans la partie numérique. Cette condition aux limites
est une condition aux limites transparentes que nous définirons dans la
suite, elle permet de limiter les phénomènes de réflexion
d'onde qui apparaissent au fond lorsqu'on considère un domaine
délimité par une frontière bornée.
Sur la structure immergée représentant le
sous-marin notée b
Dans ce travail, la structure (un sous-marin) est
supposée animée d'un mouvement rectiligne uniforme à la
vitesse : -u-?e1 dans un repère lié
à notre bassin rempli d'eau.
Et en se plaçant dans le référentiel
lié à la structure, cela revient à supposer qu'il est fixe
et parcouru par un écoulement uniforme de vitesse
u-?e1 ,
venant de x = -8 .
En désignant par d, le déplacement du
sous-marin dans le référentiel qui lui est lié, et par
íb la normale unitaire sortante à la frontière
b délimitant le sous-marin.
L'équation linéaire de son mouvement est d'une
manière génerale donné par:
?d?t + Vb?0
· Vbd,
?? = ?íb
ou Vb représente le gradient par rapport aux
coordonnées variant sur la frontière b.
Et comme dans ce référentiel le sous-marin est
immobile, on a : d = 0 ce qui implique que :
?? = 0, sur b. ?í
Sur les frontières latérales 1
et 2
Sur les frontières 1 et 2, on veut introduire des
conditions particulières d'entrée et de sortie pour simuler
l'écoulement à l'infini. Sur ces deux frontières un
traitement particulier sera fait.
Nous présentons dans la section suivante une
méthode permettant de répondre à cette
problématique : ce sont les conditions aux limites transparentes.
2.4 CONDITIONS AUX LIMITES TRANSPARENTES
De nombreux problèmes de propagation d'ondes se posent en
milieu
non borné ou du moins très grand par rapport
à la zone d'intérêt.
Pour des raisons pratiques évidentes, on est
amené à réduire les calculs effectifs à un domaine
borné en espace. Se pose alors le problème du traitement de la
frontière artificielle ainsi introduite afin de simuler le fait que le
milieu de propagation réel est infinie.
C'est ce qui nous amène à introduire les notions
de conditions aux limites transparentes appliquée à notre
modèle hydroacoustique.
La méthode consiste à borner latéralement
notre domaine de calcul par des frontières découpées selon
les isopotentielles sur lesquelles on écrit une condition aux limites
dite transparente, c'est-à-dire une condition exacte qui prend en compte
le comportement à l'infini des ondes sortantes sans réflexion
parasites, et qui n'influence pas la solution.
Nous traitons successivement deux cas de difficultés
croissantes dans cette section, d'abord la formulation monodimensionnelle
décrivant la condition aux limites transparentes pour la propagation des
ondes acoustiques qui est un cas classique mais dont l'étude a des
vertus pédagogiques et ensuite la généralisation en
dimension n = 2,3 de cette formulation, toujours pour les ondes
acoustiques.
2.4.1 Condition aux limites transparentes en dimension n
=1 Considerons une equation d'ondes homogène en dimension 1.
|
{
|
a2 au
at2u (x, t) --
c2f ax2
(x, t) = 0 pour x E IR et t > 0,
u(x, 0) = u0(x) pour
x E IR,
'
at
au (x 0) = u1(x)
pour x E IR.
|
(2.18)
|
On cherche la solution generale de cette equation differentielles
aux derivees partielles en effectuant le changement de variable :
|
{
|
X = x + cft,
Y = x -- cft.
|
En posant
u(x, t) = U(X,
Y),
l'equation des ondes (2.18) en variable X, Y
s'ecrit sous la forme :
Par integration, on obtient :
U(X, Y) = F(X)
+ G(Y) <=> u(x, t) =
F(x + cft) + G(x -- cft).
(2.19)
Les fonctions F et G sont arbitraires et au
moins de classe C2 et dependent du choix des conditions
initiales en vitesse, en positions et aux limites à l'infini :
on obtient le système :
|
{
|
F(x) + G(x) =
u0(x), Fi(x) --
Gi(x) = u1(x).
|
La solution du problème (2.18)avec des conditions
initiales donnees est donc la superposition de deux ondes progressives, l'une
se propageant vers la droite à la vitesse cf, l'autre vers la
gauche à la vitesse --cf. Cette solution est donnee par la
relation :
c ,. f x-t x+ t
u(x, t) = 1 [u0(x +
cf t) + u0(x -- cf t)] + ' u1
(s)ds. (2.20)
2
au
at
Nous allons maintenant etudier la façon dont l'onde
propage l'information. Pour cela, nous definissons les courbes caracteristiques
en posons : 41= --cf ax au et x =
En remplaçant dans l'équation (2.18), on obtient
:
? (ø
?t
) ? 0 cf ?
÷ + 0?
cf 0 x
) at = 0
] ,
L'équation des ondes est hyperbolique donc on peut
diagonaliser la ma-trice qui intervient dans l'équation differentielle
.
On obtient un système d'équations
différentielles découplées d'ordre 1 :
?
?
?
?t
? ?
C- ? ? ?
-cf 0 C-
?
? + ? ? ? ? = 0
C+ ?t
0 cf C+
Les vecteurs propres associés aux valeurs propres
cf et -cf sont :
|
?
v1 = ?
|
1
-cf
|
et ?
) v2 = ?cf1.
|
donc les composantes dans la bases des vecteurs propres sont :
?
??? ?
????
?u cf ?x
C+ = ?u
?t
?u
?x
?u
C- = ?t + cf
Les quantitées C- et C+ sont
conservées le long des courbes caractéristiques :
x - cft = constante et x +
cft = constante
Ce sont les quantitées entrantes et sortantes,
respectivement aux vitesses : -cf et cf au travers des
frontières lorsqu'on limite le domaine.
Conditions limites
D'après ce qui précède, C-
et C+ sont invariantes le long des courbes
caractéristiques, donc ce sont les quantités entrantes et
sortantes du domaine.
Supposons que l'on place une frontière ouverte,
c'est-à-dire transparente, en x = L (cf figure 2.2).
On se place dans l'hypothèse oil l'influence extérieure est
nulle. La quantité entrante est donc nulle :
C+ = 0,
le même raisonnement en x = -L,
mène à la condition :
C- = 0.
En tenant compte des expressions de C- et
C+ données précédemment, on obtient que
les conditions aux limites naturelles pour u pour les
frontières ouvertes sont définies par :
|
?
????
????
|
?u ?u
?t (-L, t) - cf ?x
(-L, t) = 0?uu?u
?t (L, t) + cf ?x
(L, t) = 0 '
|
(2.21)
|
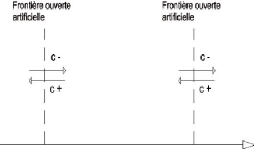

FIGURE 2.3 - Représentation des quantités
caractéristiques au travers des frontières ouvertes.
Mise en oeuvre et résultats numérique en
dimension 1
La mise en oeuvre numérique en dimension un du
problème concernant la condition aux limites transparentes est la
suivante.
Dans un premier temps, nous considérons le problème
suivant :
|
?2u
?t2 - c2 ?2u
?x2
|
= 0 xE]0, L[×]0, T[,
|
conditions initiales :
u(x,0) = u0 x E]0, L[,
?
???????????????????????? ?
?????????????????????????
?u
(2.22)
?t (x,0) = u1 x E]0, L[,
conditions aux limites :
u(0, t) = 0 ?t > 0,
?u ?u
?t (L, t) + c?x
(L, t) = 0 ?t > 0.
Ou c représente la vitesse d'onde en mètre
par seconde.
Ce problème sera mis sous sa forme variationnelle que nous
décrivons ci-après. Ensuite, nous présentons les
résultats numériques obtenus.
Formulation variationnelle
On considère l'espace :
V = {v E H1(]0,
L[), v(0) = 0}
Le problème devient après multiplication par
v :
L ?2u L ?2u
o
?x2
v(x)dx = 0,
? v ? V; f?t2
v(x)dx - c2
en intégrant ensuite par parties le deuxième terme
entre 0 et L , on obtient :
?v, at2 0 ax
fL ?2u L ?u (x'
t) J (x,t)v(x)dx +
c2 I ?u (L,
t)v(L) = 0,
0 ??v
x (x)dx c?t
On approche l'espace V par l'espace des fonctions affines par
morceaux et continues wi :
L
Vh = {wi : wi(xj)
=äij,?i = 1, ...N - 1 , ?j = 1,
...N - 1 et xj =j N } Le problème
approché dans Vh est donc :
|
trouver uh ? Vh tel que ? vh
? Vh :
L ?2uhL? ax ?x ?t ax ?vh uh
?t2 (x,
t)vh(x)dx + c2 I
(x, t) (x)dx ca
(L, t)vh(L) = 0.
o
|
Le modèle peut donc s'écrire formellement sous
forme d'une équation différentielle matricielle à
coefficients constants :
|
?????
|
trouver X(t) tel que :
M ·X(t) + C
ÿX(t) + AX(t) = 0,
|
(2.23)
|
où :
- M est une matrice de masse,
- A une matrice de raideur,
- C une matrice contenant un seul élément .
Et l'équation différentielle du second ordre
(2.23) est résolue, en introduisant un découpage en temps, ou
nAt est le pas de temps et tn =
nAt. Pour obtenir un schéma totalement
discrétisé, on approche en temps par :
- ·X(nAt) =
|
Xn+1 - 2Xn +
)0-1
At2
|
Et pour améliorer la stabilité, il est
préférable de moyenner les termes de raideur en posant :
X(nAt) = Xn+1 +
Xn
2
ce qui conduit au schéma suivant :
M Xn+1 - 2Xn
+ Xn-1 + C Xn+1 - Xn +
AXn+1 + Xn = 0, (2.24)
Ät2 Ät 2
équivalent au schéma :
Ät2
2 A]Xn+1 = [2M +
ÄtC - Ät2
[M + ÄtC + 2
A]Xn - MXn-1. (2.25)
Analyse de la stabilité
Nous ferons l'analyse de la stabilité de ce schéma
en utilisant les techniques de l'énergie.
Pour cela, nous considérons le schéma (2.24)
précedent :
Xn+1 - 2Xn +
Xn-1 Xn+1 - Xn
Xn+1 + Xn
M + C + A = 0,
Ät2 Ät 2
ce qui donne :
M( Xn+1 - Xn
Ät2 ) - M( Xn+1 - Xn
Ät2 ) + C( Xn+1 - Xn
Ät ) + A( Xn+1 + Xn
2 ) = 0
En multipliant scalairement par :
Xn+1 - Xn,
M(
Xn+1 - Xn Ät , Xn+1 -
Xn
Ät ) + 1
ÄtC(Xn+1 -
Xn, Xn+1 - Xn) +
1 2(AXn+1,
Xn+1)
= M( Xn - Xn-1
Ät , Xn+1 - Xn
Ät ) + 1
2(AXn, Xn).
(2.26)
L'inégalitée de Cauchy-Schwarz suivante :
(MX, Y)
=<12(MX,, X) +
12(MY,, Y),
appliquéee au premier terme du second membre de
l'égalitée (2.26), donne :M( Xn - Xn-1
Ät , Xn+1 - Xn
Ät ) = 1 2 M( Xn -
Xn-1
Ät , Xn - Xn-1
Ät ) t1 1Xn+1 1-
--XnnXn+1 i- --Xnn+ +2M((Ät
t, 'Ätt ),'
on obtient ensuite :
1 1(MXn+1 1-
--XnnX+1 1- _Xnn11112Ät
,
'
Ät
)
)
+
+
ÄtC(Xn+1
1
-
--
Xn,
,
Xn+1
1
-
--
2
t
t
+ 2 A(Xn+1,
Xn+1))
Xn)
)
+
11Xnn-_Xn-11Xn n-
_Xn-11=<2M((
Ät t, 'Ätt
).
·
(2.27)
Et comme la matrice C contient seulement un seul terme
positif, alors le terme suivant est positif :
Ätt
1 C(Xn+11 ---
Xn, Xn+11 ---
Xn)) => 0,
l'inégalité (2.27) donne l'inégalité
:
2 M( Xn+1 - Xn
1 Ät , Xn+1 - Xn
Ät ) + 1 2
A(Xn+1, Xn+1) =1 2 M(
Xn - Xn-1
Ät , Xn - Xn-1
Ät )
+ 2 A(Xn,
Xn).
1
On définit l'énergie mécanique par:
1 Ät , Xn - Xn-1
En = 2 M( Xn - Xn-1
Ät ) + 1 2 A(Xn,
Xn),
d'où
En+1 = En.
L'énergie mécanique totale est
décroissante au sens large au cours du temps, ce qui assure la
stabilité de ce schéma numérique dès que la
solution est elle-même stable.
Résultats numériques
Pour cette application numérique, nous
considérons une onde se propageant sur un segment de longueur L
= 10 m, que nous maillons en 250 points.
La célérité de l'onde est égale c
= 340 m/s.
Les figures suivantes représentent la solution
numérique du modèle (2.29) qui est une onde progressive.
Dans cet exemple, la condition aux limites est appliquée
sur la frontière
représentant la section de sortie du fluide
afin de vérifier sa transparence,
dans le sens où celle ci
laisse sortir les ondes et ne provoque pas de retours.
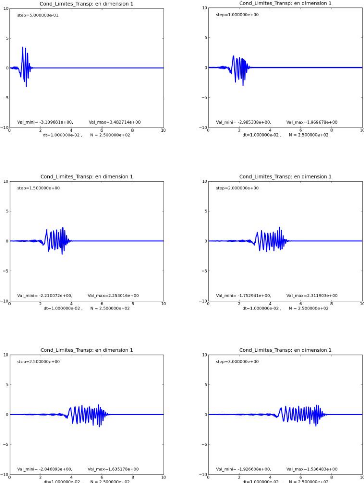
Sur ces figures, nous avons l'onde longitudinale se propageant
vers la frontière droite. Sur cette frontière, nous avons
défini une condition aux limites transparentes pour laisser sortir
l'onde sans réflexion parasite.
Les figures suivantes confirment bien le caractère
transparent de cette condition.

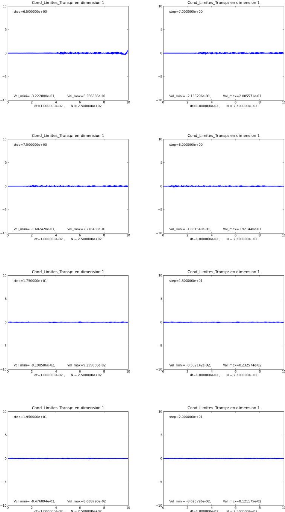
Conclusion
En effet, comme le montre ces différentes figures nos
résultats sont en parfaits accord avec le modèle physique et l'
approximation est justifiée pour une équation d'onde acoustique
en dimension un.
L'étape suivante de l'étude est de formuler
analytiquement et de tester cette condition de manière
genérale.
2.4.2 Condition aux limites transparente en dimension
n=2; 3 Nous considérons une équation d'ondes
non-homogène
???? ?
???? u(x, 0) = u0(x), ?t
(x, 0) = u1(x) pour tout x ?
Rn,
?2u
?t2(x, t) - c2 f
Äu(x, t) = f (x, t),
pour tout x ? Rn et t
?]0, 8[, ?u
(2.28)
dont les termes sources
f : R+ ×
Rn ? Rn,
u0 : R+ ? Rn et
u1 : R+ ? Rn
sont des fonctions de classe C8 et dont les
supports sont inclus dans le borné :
Ù = [-L, L]n
avec L > 0.
Et
f (x, t) = 0, u0(x)
= 0 et u1(x) = 0 pourx ?6 Ù =
[-L, L]n et t = 0.
Cherchons maintenant à calculer les valeurs de la
fonction u, solution du système (2.28) dans le domaine Ù
= [-L, L]n, tout en modélisant le
comportement de cette pour tout
x ? Ùc = {x
? Rn : |x| > L}
à l'aide des conditions aux limites en espace
posées à une interface entre Ù et
Ùc définie par :
= {x ? Rn :
|x| = L}
Comme en dimension un, nous faisons une étude pour les
ondes planes. Désignons par í, la normale unitaire
sortante à .
Ensuite, considérons la relation (2.21) en dimension 1,
nous envisageons une condition aux limites à l'interface du type :
?u
?x ? , ?t (x, t) +
(cf
· í)?u
?í (x, t) = 0 t ?]0,
8[. (2.29)
?
??????????????????? ?
????????????????????
Trouver une fonction u(x, t) :
Ù × [0, 8[? R telle que :
?t2(x, t) - c2 f
Äu(x, t) = 0, pour tout x ?
Ù et t ?]0, 8[,
?2u
On est alors amené à resoudre le problème
équivalent
?u
(2.30)
u(x, 0) = u0(x), ?t
(x, 0) = u1(x) pour tout x ? Ù,
et les conditions aux limites,
?u
?t (x, t) + (cf
· í)?u
(x, t) = 0 sur et t ?]0, 8[.
La restriction de la solution du problème (2.28)
à x ? Ù, vérifie (2.30). Pour montrer que l'on
peut calculer cette restriction en résolvant (2.30), il nous suffit de
montrer que ce problème admet une unique solution. Commençons par
définir l'espace admissible sur lequel, une formulation variationnelle
du problème (2.30) sera établie. Nous considérons pour
cela, l'espace
V = {v ? H1(Ù) :
Äu ? L2(Ù) et ?u ?t + (cf
· í).?u
?í = 0 sur }
En multipliant la première équation du
système (2.30), par une fonction test arbitraire de l'espace V,
on peut construire formellement la formalution variationnelle de ce
système :
at?v ? V, In
at (x, t)v(x) -
äu(x, t)v(x) = f
(x, t)v(x)dx.
Appliquons, toujours formellement (car nous ne connaissons pas
la régularité de la solution éventuelle) la formule de
Green et compte tenu des conditions aux limites sur , cela conduit à
:
?l i ?t u ?u (x,
t)v(x)d
r
= f (x,
t)v(x)dx.
On place cette écriture dans un cadre
général en introduisant les formes bilinéaires suivantes
:

fr)
?t (x, t)v(x)dx + cf2
I
u(x, t)
·
V
v(x)dx + (cf
· í)
(2.31)
?
|
????????? ?
??????????
|
?v, w ? V, a(w,
v) = cfI w(x, t)
·
Vv(x)dx,
?v, w ? V, m(w,
v) =
cw(x)v(x)dx,
?v, w ? V, c(w,
v) = (cf
· í)
frw(x)v(x)dx,
|
ainsi que la forme linéaire :
?v ? V, L(v) = I f
(x, t)v(x)dx.
L'équation que nous avons obtenue se formule de la
façon suivante avec ces notations :
|
? ??
??
|
trouver u telle que à chaque instant t
on ait u(x, t) ? V : et
vérifiant,
?v ? V, m( ·u,
v) + c( ÿu, v) +
a(u, v) = L(v).
|
(2.32)
|
L'espace des fonctions admissibles V étant un
espace de Hilbert. Il existe donc une famille totale {wn},
de cet espace qui forme une base de V. Nous désignons
par VN le sous espace de V engendré par
les N premiers vecteurs de cette famille.
Pour établir l'existence d'une solution à
l'équation (2.32),nous utilisons
une suite de problèmes approchés construits
à partir de VN .
Nous montrons alors que cette suite converge vers une solution
de (2.32) lorsque N tend vers l'infini, et cela dans un espace Hilbert
ad hoc, que nous introduisons a priori par
W(0T) = {v = (vi); v
E L2(0T; V) ; ?v ?t E
L2(0T;
(L2(Ù))3)}, muni de la norme
définie à partir du produit scalaire :
Z T Z Z T Z ?u
?u
(u, v) = Ù(Vu
· Vv + uv) + ?t .
0 0 Ù ?t
Nous lui associons le sous espace :
WN(0T) = {v E
W(0T) ; v(t) E VN}, A
chaque entier N, on associe le problème :
|
? ??
??
|
trouver uN E
WN(0T) tel que :
?v E VN, m(
·uN, v) + c(
ÿuN, v) + a(uN,
v) = L(v).
|
(2.33)
|
auquel on adjoint les conditions initiales :
uN(t = 0) =
ðNu0(x) et ÿuN(t
= 0) = ðNu1(x).
ðN désignant l'opérateur
d'interpolation (ou d'approximation) de V dans
VN.
Il vérifie la propriété
lim IIu0 - ðNu0llV =
0.
N?8
Choisissons dans (2.33)
v = ÿuN,
On obtient
1 d
2 dt
[m( ÿuN,
ÿuN) + a(uN,
uN)] + c( ÿuN,
ÿuN) = L( ÿuN). La
forme bilinéaire c vérifie
j1? ÿuN E VN,
|c( ÿuN, ÿuN)| =
|(cf .í)|
|ÿuN|2dx = 0, cela permet
d'obtenir l'inégalité suivante :
Z t
2[m(
ÿuN, ÿuN) +
a(uN, uN)](t) = 1 1
2[m( ÿuN,
ÿuN) + a(uN,
uN)](0) + 0 L(
ÿuN).
On fait alors l'hypothèse que
L(.) définit une forme linéaire continue sur
(L2(Ù))3, de telle façon que :
Z t
| 0 L( ÿuN)| =
IILIIL2(0t;(L2(Ù))3).II
ÿuNIIL2(0t;(L2(Ù))3).
Et comme les formes m(., .) et a(., .), sont
continues et coercives sur l'espace V, on deduit qu'il existe une
constante positive C, independante du temps et telle que :
I ÿuNk20,Ù(t) +
IuNI21,Ù(t) =
C[I ÿuNl20,Ù(0) + IuNI21,Ù(0) +
ll II2
I,
..L2(0t;(L2(Ù))3)]
t
I
+ C I ÿuNl20,Ù.
En appliquant le lemme de Gronwall à la fonction
t
((f MÿuNaÙ) +
1114N1120,Ù(t)) C,
((f
on en deduit alors l'estimation
IuNiW(0T) =
C,
Puisque l'espace W(0T) est reflexif, on peut
extraire de uN, une sous suite notee
uN, telle que :
uNi ? u* ?
W(0T) (convergence faible dans W(0T)),
Par un passage à la limite (faible) dans l'equation
(2.33), nous obtenons l'existence d'une solution dans l'espace
W(0T) à l'equation (2.32).
L'unicite decoule de l'inegalite suivante :
si u1 et u2 sont deux
solutions de (2.32), alors
2[m(
ÿu1 -
ÿu2, ÿu1 -
ÿu2) + a(u1 -
u2, u1 - u2)](t) =
-c( ÿu1 - ÿu2,
ÿu1 - ÿu2) = 0. 1
ce qui implique
2[m( ÿu1 -
ÿu2, ÿu1 ÿ2
- u ) + a(u1 - u2,
u1 - u2)](t) = 0,
1
et
1 2
u = u .
En conclusion, la restriction de la solution du problème
(2.28) admet bien une solution unique. Ce qui montre que le problème
(2.30) est bien pose.
Conditions aux limites sur 1 et
sur 2
D'après ce qui precede, on peut construire une
condition aux limites transparentes conduisant à des problèmes
bien poses dans le cas d'ondes acoustiques. Cette condition aux limites,
fournit un comportement le plus "transparent" possible, c'est-à-dire
qu'elle laisse passer les ondes entrantes et sortantes.
Ainsi le traitement aux frontières, 1 et 2 du domaine
Ù ne se fait pas sur les grandeurs physiques, mais sur des variables
calculees à partir de celles-ci en supposant que les ondes se propagent
orthogonalement aux frontières considerees.
Dans le cas oil les ondes se propagent suivant des directions
quelconques
aux frontières considerées, des
difficultés supplémentaires apparaissent à cause des
dérivées tangentielles de la vitesse sur ces frontières.
Ce cas ne sera pas abordé dans ce travail, nous traiterons uniquement le
cas oü les ondes se propagent orthogonalement aux frontières.
Définissons la frontière 1 comme étant
l'ensemble :
1 = {x ? R3; e1
· í(x) = 0}
oü í(x) est la normale unitaire
sortante à l'ouvert Ù et au point de coordonnées x
et e1 est le vecteur directeur de la direction de
l'écoulement
sur laquelle le champ de vitesse des particules fluides est
imposé. On a,
u = ue1, u > 0 sur 1, et u
= 0 sur b,
et le produit scalaire intervenant dans la formulation analytique
des conditions aux limites (2.29) devient :
cf.(e1
·
í(x)) = -cf
Nous définissons de même la face sortante de
l'écoulement notée 2, par:
2 = {x ? R3; e1
· í(x) = 0}
Sur cette dernière, nous laissons l'écoulement
sortir librement sans reflex-ion. Et comme la normale sortante à cette
frontière est supposée colinéaire au champs de vitesse, le
produit scalaire intervenant dans (2.29) s'écrit
cf.(e1
·
í(x)) = cf.
Ainsi en tenant compte de l'écoulement et de l'onde
acoustique, il est naturel de considérer sur ces deux frontières
les conditions suivantes :
|
?? + (u -
cf)??
?í = 0, sur 1,
?t (2.34)
?? ?t + (u + cf
)??
?í = 0, sur 2.
|
2.4.3 Conclusion
Ce chapitre a été consacré à la
présentation et la définition mathématique des
modèles utilisés dans cette étude.
Le travail reporté dans ce chapitre porte aussi sur la
construction mathématique d'une condition aux limites
particulière sur les frontières verticales 1 et 2 du domaine
Ù .
Cette condition aux limites dite transparente, qui prend en
compte le comportement à l'infini de l'onde et qui la laisse passer sans
réflexion est étudiée dans ce chapitre pour une
propagation d'onde acoustique dans un écoulement uniforme.
Nous avons ensuite réalisé un test
numérique de validation en dimension
un, les résultats obtenus sont en très bon
accord avec le modèle physique. Le chapitre suivant concerne la
formulation variationnelle en dimension deux du modèle. Nous allons dans
un premier temps établir la formulation variationnelle du modèle
fluide et ensuite du modèle de surface. Puis une étude
d'existence et d'unicité du modèle couplé fluide-vague de
surface dans un espace des fonctions admissibles approprié sera
faite.
3
PRopRiéTés DEs MoDèLEs
D
Epuis l'avènement des ordinateurs, la simulation
numérique a parfois remplacé l'expérimentation directe
trop coûteuse et longue à mettre en oeuvre.
Sur le plan mathématique, la simulation
numérique nécessite essentiellement la résolution
numérique d'équations aux dérivées partielles qui
conduisent à l'obtention de solutions approchées.
Il existe de nombreuses méthodes d'approximation qui
présentent toutes des avantages et des inconvénients; citons
à titre illustratif, la méthode des différences finis, la
méthode des volumes finis, les méthodes spectrales, la
méthode des élèments finis...
Dans ce rapport, nous nous intéressons à la
méthode des éléments finis qui est très
utilisée dans l'industrie. Cette méthode est intéressante,
compte tenu de sa souplesse d'utilisation, en particulier vis-a-vis de
l'approximation des divers opérateurs modélisant des
phènomènes en physiquemathématique et également
pour la prise en compte de conditions aux limites portant sur les gradients de
la fonction à calculer.
La méthode des éléments finis est une
méthode d'approximation des solutions d'équations aux
dérivées partielles qui est construite à partir d'une
formulation équivalente du problème à résoudre;
cette dernière est appelée formulation variationnelle du
problème et nécessite le minimun de régularité de
la solution.
Cette phase de transformation du problème est la plus
délicate et la plus difficile à traiter car, en toute rigeur,
elle nécessite l'utilisation de notions mathématiques très
fines et très abstraites.
Dans cette section, nous-nous efforcerons d'aplanir les
difficultés en établissant séparemment la formulation
variationnelle du modèle hydroacoustique et celle du modèle de
vague.
3.1 FoRMuLATioN vARiATioNNELLE
3.1.1 Formulation variationnelle du modèle
Hydroacoustique avec écoulement
Nous supposons que la géométrie de l'ouvert 1
est celle de la Figure 2.2 (modèle). Sur les frontières
latérales F1 ou F2, on utilisera les conditions aux limites
transparentes définies par (2.34).
Et sur Fs qui représente la surface
libre, nous avons le couplage entre le potentiel de vitesse du fluide et le
déplacement d'un point de la surface libre défini par
l'équation (2.17).
On considère comme espace des fonctions admissibles,
l'espace : H1(Ù) = {v | v ?
L2(Ù) | ?kv ?
L2(Ù) k = 1,2}
En multipliant l'équation ci-dessous par une fonction test
arbitraire ø de l'espace H1(Ù), nous
obtenons :
?
(?t ?
2Vrpo
· v(??
) + v?0
· v(v?0
·
v?)-c.1.Ä?).ø=
0 dans Ù×]0, T[,
?t
puis après intégration sur l'ouvert Ù :
Z Z Z Z
?2?
?t2 ø + 2 Ù
r?0
· r(?? ?t
)ø + Ù G?0
· V(V?0
· V?)ø- c2
ÙÄ?ø = 0,
f
Ù
qui s'écrit
|
Z Z Z
?2?
?t2 ø + Ù
r?0
· r(?? ?t
)ø + Ù r?0
·
r(?? ?t ).ø
Ù | {z }
*
|
Z
+ Ù
V?0
· V(V?0
·
v?).ø
| Sys.
**
|
= 0.
Z
- c2 Ù Ä?.ø a
Nos.
***
On utilise la formule d'intégration par partie de Green
aux intégrales suivantes :
Z Z Z
* Ù r?0
· r(??
?t ).ø = -
Ù(r?0
· rø)??
?t + ?Ù(r?0
· í)??
?t ø,
Z Z Z
* * Ù r?0
· r(r?0
·
r?)ø = - Ù(r?0
·
r?)(r?0
· rø) +
?Ù(r?0
· V?)(V?0
· í)ø,
Z Z Z
* * * Ù Ä?ø = - Ù r?
· rø + ?Ù(r?
·
í)ø,
et comme :
?
??? ?
????
?0
Gr?0
· í = ? ?í
,
??
'?
· í = ?í
.
En remplaçant dans l'équation
précédente , on obtient :
|
Z Z f
?2?
?t2 ø + Ù V?0
· V(?? ?t )ø -
Ù(V?0
·
Vø)??
Ù
?t
|
ZÙ
|
(V?0
· V?)(V?0
·
Vø)
|
Z
+ c2 Ù V?
· Vø
= L(ø),
a
Le second membre est une somme des intégrales sur la
frontière de notre domaine.
Il est defini de la façon suivante :
Z Z Z
?? ??0 ??
L(ø) = c2 f ?í
ø - ?t ø -
?Ù(r?0
·
r?)??0
?í ø.
?Ù ?Ù ?í
Or, nous savons que l'un des avantages de la formulation
variationnelle des équations de la physique, est de permettre la prise
en compte des conditions aux limites dans les termes frontières.
L'expression explicite de ce second membre est obtenue en
évaluant ces différentes intégrales sur la
frontière du domaine Ù découpée en 5 parties :
?Ù = 0 ? 1 ? 2 ? s ?
b,
ce qui nous amène à faire une évaluation de
L(ø) sur chaque sous frontière en
commençant par:
Le fond du bassin noté 0,
Nous supposons d'abord que le fond de notre bassin est
étanche, dans ce cas la condition de non
pénétrabilité du fluide s'écrit :
?? = 0.
?í
où í est la normale unitaire sortante
à l'ouvert Ù, et dirigée vers le bas. Nous
précisons par ailleurs que pour les applications numériques, nous
utiliserons une condition aux limites transparentes. Elle permettent
d'éviter les rebonds, les ondes piègées et de laisser
sortir les ondes.
Ensuite, sur la frontière latérale gauche
1,
nous appliquons la condition limite transparente pour
modéliser la sortie des ondes en présence dans le fluide.
Pour un écoulement permanent représenté
par le potentiel de vitesse : ?0(x) = ux1, nous
auront donc une condition aux limites dite condition transparente de type:
?? ?t + (??0
?í - cf)??
?í = 0, sur 1.
Et la frontière latérale droite
2,
pour la même raison que précedemment, la condition
aux limites sur 2 est :
?? ?t + (??0
?í + cf )??
?í = 0, sur 2.
Pour la surface libre du liquide notée
s,
la condition aux limites n'est nullement évidente car
les deux composantes (air et eau) sont en mouvement, mais pour assurer le
couplage entre le fluide et le déplacement transverse de la surface
libre, nous considérons l'équation :
??
?í =
?ç
?t +Vs?0
·
Vsç, sur s×]0,
T[.
Enfin sur la structure immergée
délimitée par la frontière notée
b,
nous avons d'après l'analyse faite sur le traitement
des différentes conditions limites dans la section précedent, une
condition de type Neumann homogène :
??
= 0,
?í
traduisant l'immobilité de notre structure dans le
repère qui lui est lié, et la non
pénétrabilité du fluide à travers sa surface.
Ainsi le terme L(ø), devient en tenant
compte d'abord des conditions sur 0 et b :
L(ø) = c2ffr,
avø I
??0 ap ?t .
??
(Vpo
· Vp)
1?2?s av r1?2?s ?í
fr1?2?s ?0í
c'est-à-dire
Z L(ø) =
cf?í vy+cf 2
?
r1urí riur2
?? 2 f ?? 4' I
??0 ??ø I ?
riur2(Vq)o
· Vp)? ?í
0
?í
· ?t
or sur s, nous avons :
?? ?ç
= + rs?0
·
rsç,
?í ?t
et dans la base local, nous avons par définition
|
V?0 =
|
?
??? ?
????
|
??0
|
et
|
? ??
|
|
?í
??0
|
??? ?
?í ,
V? =
???? ??
|
|
?s
|
?s .
|
L'apparition des dérivées tangentielles de
?0 sur les frontières latérales entraînent des
difficultés supplémentaires pour la prise en compte de condition
aux limites transparentes.
De ce fait, nous proposons dans la partie suivante une
construction des nouvelles frontières latérales F1 et F2 suivant
les équipotentielles telle que toutes les dérivées
tangentielles de la vitesse d'écoulement du fluide soient nulles.
Nouvelles frontières F1 et
F2
Intéressons nous aux profils des vitesses (lignes de
courants) autour de la structure.
Dans le domaine contenant la structure (le sous-marin) le
fluide est considéré comme incompressible et irrotationnel,
l'écoulement étant uniforme. La recherche du potentiel des
vitesses pour un tel écoulement autour de la structure doit satisfaire
uniquement deux conditions : loin de l'obstacle, on doit retrouver un
écoulement presque uniforme avec un potentiel de vitesse
?0 = Ux,
et sur l'obstacle, la vitesse normale à la paroi doit
être nulle. Ainsi la structure constituant une perturbation de
l'écoulement uniforme.
Nous obtenons à partir du potentiel de vitesse et de la
relation,
les composantes du vecteur vitesse
Ux = U et Uy =
0,
en chaque noeud du maillage éloigné de la
structure. Et au voisinage de la structure dans 1), nous avons cette fois
Ux =6 0 et Uy =6 0.
Les lignes de courant au voisinage de la structure sont alors
définies comme des lignes tangentes aux vecteurs vitesses en chaque
noeud du maillage. Ce sont des courbes qui ne se croisent jamais (sinon il y
aurait deux directions différentes d'écoulement pour une
même particule de fluide à un instant donné).
Elles sont définies par l'équation,
|
dx
=
Ux
|
dy
Uy
|
= Uxdy - Uydx = 0.
(3.1)
|
Au même titre que la fonction potentiel, nous
introduisant au voisinage la structure la fonction de courant que nous notons
ø à partir des composantes de la vitesse. Pour cela nous
posons :
?ø ??0
? ?
y x
?ø ??0
Uy = -=
?x ?y
Ux = =
En utilisant la relation (3.1) et les deux équations
précédentes on a,
?ø ?ø
dy + dx = 0 = ø = constante.
?y ?x
ce qui signifie qu'en chacun de ses points, la courbe est
orthogonale au vecteur vitesse (voir figure 3-1). Il en résulte par
ailleurs que les équipotentielles sont partout orthogonales aux lignes
de courant.
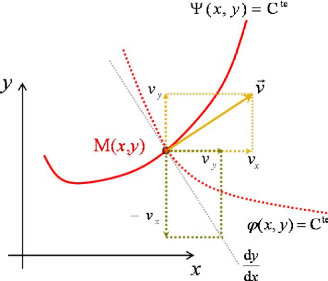
FIGURE 3.1 - les équipotentielles sont orthogonales
aux lignes de courant.
Ainsi, nous pouvons à partir des lignes de courant
construire deux équipotentielles représentant respectivement la
frontière latérale gauche et droite du domaine. Ces deux
frontières sont construites de façon à éviter les
ondes tangentielles, l'expression du gradient de ?0 dans le
repère local devient :
?
????
????
V?0 =
??0 =6 0 ?í
= 0.
??0
?s
L(ø) = c2 I
(?ç + Vspo
·
vs/)1p+ fr
ø[c2??- ??0.??-
(??0)2??]
rs ?t 1?2f ?í ?í
?t ?í ?í
r2
(?ç + v (p
· v
11.1 t??0 v??
_L ??0 ?? ??ith
= cf ?t s , 0 n1
s , fr1?2 ?í L ?t ?í
. ?í - (ate) ?í
`r .
2 is
L'écoulement permanent est caracterisé par le
potentiel de vitesse
??0
?0 tel que =6 0 ,
?í
alors
L() = c (( ??0
)?0 2 c2)
??0 f
r?? kk ?í
f??]
øf ?t + vspo
·
vs0p ?í r1?2 L ?t + ?
?í
2 I (?ç
?í
En prenant en compte les expressions des conditions aux limites
transparentes sur 1 et 2 décrite dans la section précedent, on a
:
??
?t sur
((??0
?í ) - cf)
- 1
- 1
((???í 0) + cf)
??
?t sur 2.
?
????? ?
??????
??
?v
??
=
?v
Ce qui donne, après remplacement et simplication dans
L(ø), une expression de la forme :
? ??o f
?t ((?:)-cf)
act
9)
L(ø) = c2I
(?ç + vspo
· vs1)
41 ø(
I-s ?t ?í r1
? ??0 at
?í
??0 f ø( ??
?í cf) ??)]
2
§ ?í r ?t ??0
?t
?í
qui s'écrit encore de manière plus
simplifiée :
ZL(ø) =
c2:t ø+
q. fr Vs?0
· Vsçø
+ cf fr1 ??? t ø-cf
??q): fr2
??q;ø.
Finalement la formulation variationnelle du modèle
hydroacoustique devient : ?ø ?
H1(Ù)
Z Z Z Z
?2?
?t2 ø + ÙG?0
· V(???t )ø
- Ù(G?0
·
vø)???t - c2
vs?0
· rsçø
f
Ù s
- ca(cr?0
·
V?)(V?0
· vø) +
q./ 'Cr?
· vrø
2 I c ??0 I ??4'+ c
??0 I ?? = 0
cf rs f
?í rl ?t f ?í r2 ?t ø
.
(3.2)
3.1.2 Formulation variationnelle du modèle de
vagues
Intéressons nous maintenant, à la formulation
variationnelle du modèle de vague à la surface qui s'écrit
:
?2ç ??
2åñ?t2 -
óÄsç +
ñgç + ñ?t +
ñV?0
· V? = -ñ
2|V?0|2.
La frontière de s sera
notée ?s et ís
est la normale unitaire sortante à s dans son plan
le long de ?s.
En bidimensionnel, cette frontière se réduit en des
points définissant des angles géométriques aux deux coins
supérieurs gauche et droit.
Ainsi, pour des raisons de simplification des calculs nous
supposons que :
?ç
- à gauche : ?ís = 0 ,
= 0
?ç ?ç
- et à droite : + cr
?t ís
où
cr représente la vitesse de ride
à la surface s.
Ainsi, pour la formulation variationnelle on prendra comme
espace des fonctions tests, l'espace suivant :
H1(s) = {v |
v ? L2(s) | ?v
?x ? L2(s)},
nous obtenons après multiplication et intégration
par une fonction arbitraire v ?
H1(s) :
?2 ?
v - ó I p + pg
Içv+ ñe I
?v+pf ?0
· V ?v
2åñ frs ?t2
ç Ts Asi Ts I- ?t
TsV
2JrI |v. ?0|2v.
s
On applique la formule de Green à l'intégrale :
ó I Äsip =
ó ?çv - ó I
·
Vv,
Ts fas
?ís Ts
on obtient alors la formulation variationnelle du modèle
de vague à la surface :
2åñ ,",;
?2n v+p ? ? I v +
ñg I ipo- + I Vç
·
Vv + ñ I V?0
· V?v
frs ot_ Ts
?t Ts Ts Ts
ó
+ cr
|
?t (L, t)v(L) =
-ñ2 frs|v?0|2v.
(3.3)
|
|
Introduisons quelques notations utiles pour simplifier les
écritures. Pour le système couplé, il y a en tout deux
champs d'inconnues.
- le potentiel de vitesse dans le fluide noté
?,
- le déplacement transverse d'un point
géométrique de la surface noté
Nous pouvons alors formuler le couplage de nos deux
modèle, en considérant comme inconnu de notre problème le
couple
X = (?, ç) ?
H1(Ù) ×
H1(s).
élément de l'espace admissible
H1(Ù) ×
H1(s) produit de deux espaces dans lesquels
sont définis respectivement le potentiel des vitesses et le
déplacement d'un point de la surface libre.
Et pour obtenir les symétries et antisymétries
physiques, nous multiplions l'équation de la capillarité (3.3)
par le coefficient :
c2
a = f
ñ
ce qui donne
2
2åc ç 2 I ?? #177;
2
2 f V #177; Cf v gcf I p+
óa Vrç
· 'crv +
c2Gr?0
· V?v
f rs ?t2
rs ?t Ts i
s s
cf f
2 Jr |V?0|2v.
s
(3.4)
En rappelant que :
- cf : est la vitesse du son dans le fluide (eau ),
- ñ : la masse volumique du fluide (eau).
Afin de rendre l'expression plus lisible, nous définissons
à partir des deux équations (3.2) et (3.4) suivantes :
Z Z
Z??t?ø+V?0
·
V(??qt
))ø-(V?0
·
vø):t + ?
·
vø
f
Ù- q f
?ç41-- I (vpo
·
Vp)(Vpo
· VC -- qf vs?0
·
vsçø
rs ?t f
a" I 441#177;c
?" I ?P
cf f = 0, (3.2)
?í ri ?t ?í r2 ?t
et
2 Is 2çv 2 I
??v+ c2 Içv + óa1
vç
· vv + q I Gr?0
· Vr?v
2åcf r ?t2 + cf rs ?t g
f
Ts Ts
c2 2 Jrs |v?0|2v,
(3.4)
Et nous définissons alors les différentes formes
bilinaires suivantes sur H1(Ù) ×
H1(s) :
M(X,Y) = I
?(x)ø(x)dx + 2åq
f ç(s)v(s)ds, (3.5)
Ts
C(X,Y) =
frI[r?0(x)
·
r?(x)ø(x) - r?0(x)
· rø(x)?(x)]dx
+ cffrs
[?(s)v(s) -
ç(s)ø(s)]ds +
cf?:: fr1n2
(3.6)
K(X,Y) =
frl[c.1-r ?(x)
· rø(x) - (r?0(x)
· r?(x))(r?0(x)
·
rø(x))]dx
frs[rs?0(s)
·
rs?(s)v(s) -
rs?0(s)
·
rsç(s)ø(s)]ds
Is ç(s)v(s)ds
+ óa krsç(s)
· r sv(s)ds,
(3.7)
plus une forme linéaire obtenue à partir du second
membre
c2 L(Y) = - f 2 j1
|r?0(s)|2v(s)ds.
(3.8)
,
Et le problème consiste alors à trouver un
potentiel de vitesse ? et un champ de
déplacement d'un point de la surface libre ç
vérifiant d'une part, les conditions initiales
suivante :
1. déplacement ?(t = 0, x)
= ?0(x) et ç(t = 0, s)
= ç0(s)
2. vitesse ÿ?(t = 0, x) =
ÿ?0(x) et ÿç(t = 0,
s) = ÿç0(s)
et d'autre part, l'équation :
? ??
??
Trouver X(t) ? H1(Ù)
× H1(s) tel que :
M( ·X,Y) +
C( ÿX,Y) + K(X,
Y) = L(Y), ?Y ?
H1(Ù) ×
H1(s).
(3.9)
Avant d'étudier l'existence et l'unicité d'une
solution de cette équation différentielle matricielle,
intéressons-nous d'abord à la positivité de
l'opérateur K(.,.) .
3.1.3 Stabilité du modèle
Commençons par examiner la coercivité de la forme
quradratique :
ZK(X, Y) = Ù[c2
f r?(x)
·
Vø(x) - (V?0(x)
·
V?(x))(V?0(x)
·
Vø(x))]dx
+ q frs[Vs?0(s)
· V's?(s)v(s)
- Vs?0(s)
·
Vsç(s)ø(s)]ds
Z Z
+ gc2
ç(s)v(s)ds + óa
rsç(s)
·
rsv(s)ds,
f s s
Pour cela, considerons un élément quelconque
X de H1(Ù) ×
H1(s) , on a
Z Z
K(X, X) = c2 Ù
|r?(x)|2dx - Ù
|r?0(x)|2|r?(x)|2dx f
Z Z
+ c2
rs?0(s)
·
rs?(s)ç(s) -
c2 rs?0(s)
·
rsç(s)?(s)ds
f f
s s
Z Z
+ gc2
|ç(s)|2ds + óa
|rsç(s)|2ds,
f s s ,
(3.10)
u , le nombre de Mach
cff
posons m =
et
maxx?Ù|V?0|22
= u2 =
m2c2f,,
alors (3.10)) est minorée par :Z Z
K(X, X) = (c2 f -
u2) Ù |r?(x)|2dx
+ c2 rs?0(s)
·
rs?(s)ç(s)
f s )Z Z Z
- c2
rs?0(s)
·
rsç(s)?(s)ds
+ gc2
|ç(s)|2ds + óa
|rsç(s)|2ds,
f f
s s s
s
d'oùu
K(X ,X) =>
(c2fq---
u2)i?ii,Ù, +in f
(gc2 f ,
óa)kç(s)k2 1,s
sZ Z
+ c2
rs?0(s)
·
rs?(s)ç(s)ds
- c2 rs?0(s)
·
rsç(s)?(s)ds.
f f
s s .
Et puisque nous-nous sommes placéss dans le cas oùl
:
?p = 0 sur ?s..
la formule de Green permet d'obtenirr pour
?0(x)) = ux1i :
Äs?0) = 0 sur s..
Ainsi,
Z Z
rs?0(s)
·
rs?(s)ç(s)ds
= -
Äs?0(s)?(s)ç(s)ds
s s
Z
rs?0(s)
·
rsç(s)?(s)ds
s Z
= -
rs?0(s)
·
rsç(s)?(s)ds,
s
ce qui permet d'obtenir une minoration de l'opérateur
K(., .) de la forme :
K(X, X) = (c2
f- u2) ?k21,Ù + inf
(gc2f,
óa)Iç(s)k2 1,s
Z
- 2c2
rs?0(s)
·
rsç(s)?(s)ds,
f s
et comme le gradient de ?0 est égale à
:
Vs?0 = 0,
l'inégalité de Cauchy-Schwarz appliquée au
troisième terme de gauche impose l'existence d'un nombre réel
positif noté á tel que :
Z Z c2 Z
f
2c2
rs?0(s)rsç(s)?(s)ds
= áu2c2
|rsç(s)|2ds +
|?(s)|2ds.
f f
s s á
s
|
l'inégalité précedente devient donc :
K(X, X) = (c2
f- u2)i?i21,Ù
+ inf (gc2f,
óa)kç(s)k2 1,s -
áu2c2 fkçk2
1,s -
|
cá
f k?k2 0,s.
á
|
L'application trace étant continue, en désignant
par c0 la constante de continuité on a,
?? ? H1(Ù);
I?I0,s = c0l?i1,Ù,
et l'opérateur K(., .) est bornée
inférieurement par un terme defini en fonction du paramètre
á
c0c2 f
K(X, X) = (c2 f -
u2 - )k?k2 1,Ù + (in f
(gc2 f , óa) -
áu2c2 f
)kç(s)k2 1,s.
á
?
????? ?
??????
c0c2 f
á = (c2 f -
u2)
Et pour que K(., .) puisse être est définie
positve, il suffit que l'on puisse choisir á > 0 tel que
:
ñ )
f
in f (gc2 f ,
ó c2
á = ,
u2c2f
ou encore sous forme plus explicite en simplifiant par
c2 f:
c0c2f
(c2 u2) = á = f
ceci etant possible si :
in f (gc2 f ,
óc2 ñ f )
,
u2 2
cf
u2 =1 - c2 m2 inf
(g, ó
Cette inégalité nous donne une condition suffisante
de stabilité.
En effet, en choisissant Y = Xÿ
dans le système matriciel, et puisque la matrice C définie une
forme bilinéaire antisymétrique :
C( ÿX,
ÿX) = 0
et on obtient :
d 1 ÿ ÿ 1K(X,
X)] = L(ÿX),
[_ M(X, X) + 2
dt 'z
par conséquent, lorsque L(.) = 0, le
système est conservatif vis-à-vis de l'énergie
définie par :
1 ÿ ÿ
= 2 M( X, X) + 1
2K(X, X).
Il apparaît donc clairement que la solution du
système mécanique reste uniformement bornée en temps. La
valeur exacte (au sens numérique) de u notée
uc pour laquelle la forme bilinéaire K(., .)
perd sa positivité sera calculée par une méthode
numérique à la suite de ce travail. Reste à montrer
l'existence et l'unicité d'une solution de l'équation (3.9).
3.1.4 Existence et unicité d'une solution
:
La recherche de modes propres du système couplé
est un problème difficile, nous considérons une approche
utilisant les modes propres de chaque composantes mécanique pris
séparement.
- Pour la surface libre (capillarité) :
désignons par ùsn les modes
propres de la surface capillaire (tension superficielle) associés aux
valeurs propres ës .
Le problème aux valeurs propres s'écrit :
?
????????????? ?
??????????????
trouver (ùs,
ës) ? H1(I's)
× IR+,
?ùs
ís
-Aùs + gùs
= ësùs sur Fs,
= 0 le long de ?Fs,
IFs
|ùs|2(s)ds = 1
condition de normalisation.
?
?????????????????? ?
???????????????????
- Et pour le fluide compressible : le problème
s'écrit
trouver (ùf, ëf) E
H1(Ù) x R+,
--c2 f Äù
f + V?0
· V(V?0
·
Vùf) = ëf ù f dans Ù,
?ù f = 0 sur s,
í
ù f = 0 sur ?Ù --
s,
ZÙ |ù f
|2(x)dx = 1 condition de normalisation.
ou ù f désigne les modes
propres du fluide associés aux valeurs propres ëf .
L'existence et l'unicité d'une solution au
modèle (3.9) s'obtiennent en construisant une suite de problèmes
approchés obtenus en utilisant une base réduite constituée
de modes propres du fluide et du modèle de vague obtenus
précedemment c'est-à-dire sans couplage.
Commençons par définir les espaces de dimensions
finies dans lesquels on va rechercher une approximation des solutions en ?
et ç.
Nous considérons pour cela des sous-espaces de
H1(Ù) et de
H1(s) engendrés par les N
premiers vecteurs propres de la surface capillaire de l'eau et du fluide,
notés respectivement :
N
WN = {çN /
çN = ? ánùs n } pour la
surface capillaire de l'eau
n=1
|
VN = {øN /
øN =
|
N
?
n=1
|
ânù f n } pour le fluide.
|
Notons :
VN = VN x WN.
La solution approchée XN(t)
= (?N(t),
çN(t)) du système (3.9)
est
définie comme l'unique solution du système
différentiel matriciel ci-
|
après :
|
?
????????????????????? ?
??????????????????????
|
trouver XN(t) =
(?N(t), çN(t))
? VN tel que :
?Y ? H1(Ù) ×
H1(s) n
L2(s)
M( ·XN,
Y) + C( ÿXN, Y) +
K(XN, Y) = 0 satisfaisant les conditions
initiales suivantes : XN(0) = (?N0
, çN0 ) ÿXN(0) =
(?N1 , çN1
)
|
(3.11)
|
ou :
|
(?N0 , çN0 ) ?
H1(Ù) ×
H1(s), et (?N1 ;
çN1 ) ? H1(Ù) ×
H1(s) et vérifiant respectivement
d'une part
? lim
N?8 11?t; - ?011 = 0,
+
? lim 11 ?l1 v -
?1 11 = 0,
? N?+ 8
d'autre part
? lim
N?8 11çtli -
ç011 = 0,
+
?
N?lim811ç1 N -
ç111 = 0. ? +
|
Remarquons que, lorsque N (nombre des modes retenus)
évolue, les coefficients de XN dans la base
naturelle de l'espace de dimension fini VN changent.
De ce fait, pour montrer l'existence d'une solution, nous ne
pouvions pas procéder comme dans le cas classique oil nous disposions
d'une base de vecteurs propres qui permettait de diagonaliser les
opérateurs associés aux différentes formes
bilinéaires.
Et par rapport à la vitesse critique notée
uc, nous envisageons deux méthodes d'étude
d'existence d'une solution au modèle continue.
Cas ou u < uc
: l'existence d'une solution au modèle continu, s'obtient en montrant
que la suite des solutions approchées construite à partir de
VN converge vers une solution de (3.9) lorsque N tend vers
l'infini, et cela dans un espace défini a priori.
Ainsi a chaque entier N, associons le problème suivant
:
|
? ???????
???????
|
trouver XN(t) =
(?N, çN) ? VN tel que
:
?Y ? VN, M(
·XN,Y) +
C(ÿXN,Y) +
K(XN,Y) = 0, XN(0) =
(?N0 , çN0 )
ÿXN(0) = (?N1 ,
çN1 ).
|
(3.12)
|
Choisissons dans (3.12) :
Y = ÿXN
on obtient :
dt[1
d2M(ÿXN,
ÿXN) +
12K(XN, XN)]
+ C(ÿXN,
ÿXN) = 0. (3.13)
Notons que l'opérateur,
C(X,Y) = u f
[V?0(x)
·
V?(x)ø(x) - V?0(x)
· Vø(x)?(x)]dx
+ q1
rs
[?(s)v(s) -
ç(s)ø(s)]ds +
ucf I
r1?r2
est définie par une forme bilinéaire
symétrique plus une forme bilinéaire antisymétrique, nous
pouvons le décomposé sous la forme :
C(X,Y) =
Cs(X, Y) +
Ca(X, Y)
avec
- Cs(X, Y)
opérateur symétrique,
- Ca(X, Y)
opérateur antisymétrique.
Finalement l'expression (3.13),se réduit sous forme :
d 1 .
dt 2 M(XN,XN)
2
K( XN XN)] +
Cs (ÿXN XN) =
0.
[
et comme
Cs(
ÿXN,
ÿXN) = 0.
Des propriétés des formes M(., .)
et K(., .) , on déduit par un calcul clas-
sique qu'il
existe une constante positive c, indépendante du temps et
telle
que :
+ IIXNII2V(t)) r t
c[lIgNIIV(0) +
IIXNIIV(0)1+c 0I
ÿXNk2V(s)ds.
Une application de l'inégalité de Gronwall, permet
alors de déduire une estimation a priori :
(
ÿXN0f(t) +0
kÿXNk2V(s)ds)
= c.
La suite XN est donc bornée dans
l'espace : H1(0, T; H1) n
L2(0, T; V) , qui est un espace de
Hilbert.
On peut alors extraire de XN, une sous suite
notée XN telle que :
XN X* ? H1(0,
T; H1) n L2(0, T;
V) (convergence faible)
Ensuite on peut utiliser une formulation faible
satisfaite par la solution approchée XN afin de
caractériser X*. On a alors,
pour tout Y ? H1(0, T;
H1) n L2(0, T; V) tel
que Y(T) = 0
T
M( XN,Y)dt +
IT C( ÿXN, +
K(XN, = 0,
10T 0
(3.14)
et par une intégration par partie, on a
Z0
TM ( ·XN , Y) =
-M( ÿXN(0), Y(0)) -
0 T M( ÿXN,
ÿY)dt,
eton obtient
10T M(
ÿXN , ÿY)dt + f
T C ( XN ,Y)dt + f T
K(XN,Y)dt = M(
ÿXN(0),Y(0)).
Alors le passage à la limite faible montre que
X* est une solution de la formulation faible pour tout
X E H1(0, T; H1) n
L2(0, T; V).
Nous avons donc établi l'existence d'une solution dans
l'espace H1(0, T; H1) n
L2(0, T; V) à l'équation
(3.9).
Pour ce qui est de l'unicité, on peut procéder de
la façon suivante : supposons qu'il y'ait deux solutions X1
et X2 à l'équation (3.9). Notons par X =
X2 - X1 leur différence.
En supposant que ces deux solutions soient suffisamment
régulières, nous obtenons en choisissant Y =
Xÿ dans l'équation variationnelle satisfaite
par X :
d 1 ÿ ÿ
dt[2M(X, X) +
1 2K(X, X)] =
-Cs(X, X) < 0. Ceci permet de conclure
que, X = 0, c'est-à-dire X2 = X1.
Cas ou u >
uc : nous avons un modèle d'onde instable pour lequel
l'hypothèse o- > 0 est essentielle pour prouver
un résultat d'existence. Pour une vitesse u donnée, il
y'a seulement un nombre fini de modes propres instables pour lesquels
l'opérateur de raideur est négatif.
Décomposons l'espace W en somme direct de deux
sous espace Vi et Vs ou
- Vi :est un sous espace de dimension finie
engendré par les modes propres instables,
- Vs :un sous espace de dimension finie
engendré par les modes propres stables.
On a
W = Vi e Vs
Soit k une constante strictement positive et de valeur
très élévée, et posons
X(t)
= ekteX(t),
on a
ÿX(t) =
keX(t)ekt +
ÿeX(t)ekt,
·X(t) =
k2eX(t)ekt + 2k
ÿeX(t)ekt +
·eX(t)ekt,
ce qui donne, en remplaçant dans la formulation
variationnelle de modèle (3.9) :
La forme bilinéaire définie par
l'opérateur K(., .) est continue et vérifie,
pour
tout X ? Vs, il existe une constante c0 =
0 tel que :
K(X, X) =
c0IIXIIW.
Nous avons supposé v > 0 alors toutes les normes
définies sur l'espace Vi de dimension finie engendré par
les modes propres instables sont équivalentes.
Et pour une valeur très grande de k, le terme
K(eX, Y) +
kC(eX, Y) +
k2M(eX, Y), est tel qu'il
existe une constante c1 positive telle que :
VXe ? Vi, K(
eX, eX) +
kC(eX, eX) +
k2M(eX, eX) =
c1k eXk2 W.
Afin d'obtenir une estimation a priori sur la solution
eXN du modèle approximatif, choisissons
Y = .5e dans léquation (3.14). Ce qui donne :
N
|
;·,NM(
|
A.,N
X Cs , A.,N
) \ I, XN )
k2MaeN , XN )
A-N (3.15)
= -2kM( X , X) -
kCP-eN , X )
|
Des propriétés de M(., .), il existe une
constante notée c3 indépendante du temps telleque :
1
2
d
dt[M( X , X ) +
Cs (XN , ieN) +
K(XN , feN) +
k2 MPeN ,
feN )]
= c3k ÿeXNkW
+ kC(eXN,
ÿeXN).
Ce qui permet par simple application du lemme de Gronwall,
d'obtenir
une estimation a priori sur XN ainsi
que sur ÿeXN.
On peut alors extraire une sous-suite qui converge faiblement,
vers une solution faible du modèle (3.11).
On en deduit que l'existence et l'unicité d'une
solution sont encore vraies, même si des instabilités
apparaissent. Les détails complémentaires de la
démonstration se trouvent dans [9].
3.1.5 Conclusion
L'étude présentée dans ce chapitre est
essentiellement basée sur l'établissement de la formulation
variationnelle du modèle et sur les propriétés des
différents oprérateurs linéaires obtenus.
Nous avons aussi étudié l'existence et
l'unicité d'une solution du modèle. Pour cette étude, nous
avons considéré une suite de problèmes approchés
obtenus en utilisant une base réduite constituée de modes propres
du fluide et du modèle de vague sans couplage.
Cela nous a permis d'introduire la notion de vitesse critique,
vitesse au dessus de laquelle le modèle peut être instable.
L'étape suivante sera consacré à la
validation numérique cette formulation variationnelle.
4
SCHéMAS NUMéRIQUFS
L
F besoin de recourir aux simulations numériques est
aujourd'hui omniprésent dans de multiples domaines d'applications
(automobile, aéronautique et thermique...) et ce pour plusieurs
raisons.
Tout d'abord, les simulations numériques permettent de
tester l'influence de certains paramètres et de comprendre les
phénomènes impliqués dans un écoulement :
l'accès à certaines informations est rendu possible,
l'écoulement peut être calculé et donc visualisé en
2D ou 3D.
Dans ce chapitre, nous décrivons les moyens que nous
avons mis en oeuvre pour implémenter les différents concepts
théoriques présentés auparavant et concevoir un code de
calcul pour la simulation de nos modèles. Nous avons choisi de
travailler avec le langage Python pour l'implémentation et ceci pour
plusieurs raisons, c'est un langage :
- interprété car il est directement
exécuté sans passer par une phase de compilation qui traduit le
programme en langage machine, comme c'est le cas pour le langage C,
- orienté objet de haut niveau car il propose des
fonctionnalités avancées et automatiques.
- modulaire car de nombreux modules et librairies ont
été développées,
- et à syntaxe positionnelle en ce sens que
l'indentation fait partie du langage. Alors que le point virgule permet de
séparer les instruction en langage C, l'accolade permet de commencer un
bloc d'instruction. En Python, seule l'indentation permet de marquer le
début et la fin d'un bloc.
Ainsi la syntaxe de Python est beaucoup plus simple que celle
des autres langage, ce qui améliore de façon très
significative les temps de développement.
4.1 MAILLAGF
La méthode des éléments finis repose sur
un découpage du domaine selon un maillage. L'étape du maillage
est une étape clé pour s'assurer de la validité des
simulations. Et nous utilisons le logiciel Gmsh
développé par Christophe Geuzaine et Jean-François
Remacle pour réaliser les maillages bidimensionnels sur lesquels nous
tavaillons.
4.1.1 Description du logiciel Gmsh
Le logiciel Gmsh est doté de 3
fonctionnalités principales. C'est un logiciel assez
développé, permettant la manupulation de champs de nature
variées ( scalaire, vectorielle, tensorielle, continu ou non), et
dispose d'un volume de visualisation de résultats de calculs
scientifiques.
Les fonctions
Il possède différents modules. Trois de ceux-ci
nous sont particulièrement utiles : les modules de la
géométrie, du maillage et du post-processing.
Géométie : Gmsh nous
permet de produire une grande variété de formes
géométriques. La construction d'une géométrie
permet l'emploi de paramètre sur les longueurs d'arêtes, le nombre
de mailles, la longueur des mailles,...ce qui rend facile l'adaptation d'un
maillage à un nouveau problème.
Tout élément, surface, ligne ou point peut
être considéré comme étant «physique»
c'est-à-dire qu'une information supplémentaire appelé
tag correspondant à une propriété physique sera
attribuée à l'entité, et transmise dans le fichier
contenant le maillage fini. Cela permet de différencier physiquement les
différents point, arêtes, surfaces et volumes s'ils ont des
propriétés particulières.
Mailleur : le Logiciel permet de produire un
maillage de triangles sur les surfaces définies par la
géométrie. Le nombre et la taille des mailles sont définis
via des paramètres attachés aux frontières de ces
surfaces. Le maillage peut se faire suivant certaines contraintes de
régularité des mailles (lignes et surfaces dites transfinies)
avec un nombre de noeuds imposé sur une arête, ou bien par la
définition d'une longueur approximative de côté de
mailles.
Le mailleur permet de mailler dans une, deux ou trois
dimensions, en formant successivement des éléments
linéaires surfaciques et volumiques. Post-processing :
les résultats peuvent être visualisés via le postprocesseur
de Gmsh.
Le maillage produit est traduit
généralement en termes de noeuds, lignes, surfaces et volumes
dans un fichier.msh.
La forme de fichier est décrit ci-dessous :
NOD
Nombre de Noeuds
numéro du noeud1 Xnoeud1 , Ynoeud1 , Znoeud1 ... ... ...
...
ENDNOD
ELM
Nbr elem
num elem type elem physical reg elem nbr noeuds num noeuds ...
... ... ...
ENDELM
où :
- Nbr elem = nombre d'élements (lignes, arêtes,
triangles et/ ou quadrangles),
- num elem = numéro de l'élement,
- type elem = type d'élément ( 1 = arête, 2 =
triangle, 3 = quadrangle), - physical = tag attribué à
l'élement,
- reg elem = numéro de l'entité élementaire
auquel appartient l'élement,
- nbr noeuds = nombre de noeuds de l'élement,
- num noeuds = les numéros des noeuds de
l'élement.
Dans ce travail, nous considérons deux domaines de
même dimensions pour nos différents calculs, dans les quelles nous
incluons deux structures différentes.
1. un domaine avec stucture symétrique de type : une
ellipse L'avantage de ce cas est de permettre une étude de
sensibilité au maillage. Cela consiste à faire des simulations
avec un nombre de mailles différent, et aussi de vérifier la
cohérence et la symétrie de nos résultats.
2. et un autre domaine avec stucture non symétrique : le
sous-marin Ce domaine sera notre véritable domaine d'étude, nous
ferons plusieurs simulations avec différents maillages, et pour
différentes hauteurs du sous-marin dans le domaine.
Après avoir créer nos différents
maillages avec le logiciel Gmsh aux formats «
fichier.msh », nous les importerons pour un autre
logiciel afin de pouvoir effectuer les calculs des matrices élementaires
en vu de les assemblées pour nos simulations. Nous utiliserons pour cela
le logiciel Getfem + + , que nous décrivons brièvement
dans le paragraphe qui suit.
4.1.2 Présentation du logiciel Getfem + +
Le logiciel Getfem est à la base une
bibliothèque d'élements finis génériques en C++
dont l'objectif est d'offrir une gamme d'élements la plus large possible
et un calcul de matrices élèmentaires également la plus
large possible pour l'approximation de problème linéaires ou
nonlinéaires.
La bibliothèque Getfem comprend des outils habituels
pour les éléments finis tels que des procédures
d'assemblages pour les équations aux dérivées partielles
classiques. Ses objectifs sont :
- fournir des outils de base pour le développement de
méthodes éléments finis nouvelles,
- séparer clairement les concepts de transformation
géométrique, de
méthode de quadrature, de méthodes des
élément fini et de modèles.
- mettre en oeuvre des méthodes d'assemblage
génériques; - proposer une interface simple sous Matlab et
Python.
4.2 DiscrétisatioN eN espace
Soit une triangulation donnée du domaine Ù telle
que Ù = S K?g-K.
Le paramètre h, caractérise la finesse du
maillage, et est défini de la manière suivante :
h = maxK?g-hK,
avec hK le diamètre de la plus petite
sphère contenant l'élèment K. Nous
introduisons ensuite l'espace d'approximation
Vh = {vh ?
C0(Ù)/ vh/K ?
(P1)3, ?K ?
qui est le sous-espace vectoriel des fonctions à
valeurs vectorielles continues sur Ù et de restrictions affines sur
chaque élément et correspond à l'utilisation
d'éléments finis de Lagrange de type P1.
Celui-ci constitue une approximation conforme de l'espace
H1(Ù)3 et sa dimension est égale au
nombre de degré de liberté du problème, soit 3Nh
où Nh désigne le nombre de noeuds de la triangulation
g- appartenant à Ù.
A chaque noeud ni , i = 1, Nh, de la
triangulation sont alors associées
trois fonctions de bases : wi1, wi2,
wi3 appartenant à Vh et vérifiant :
1 0 0
wi1(nj) = (0) äi,j ,
wi2(nj) = (1) äi,j , et
wi3(nj) = (0) äi,j, j = 1, ....,
Nh
0 0 1
Où äi,jdésigne le
symbole de Kronecker.
Et tout champ vh de Vh se décompose
alors sous la forme :
Nh 3
vh = ? ?
vhá(ni)wiá.
i=1 á=1
Ainsi, tout élément de Vh peut
être identifié à un vecteur colonne formé des
valeurs réelles vhá(ni) , i
= 1, Nh et á = 1,2,3 des composantes de vh
aux noeuds du maillage.
A l'aide de cette base, on peut à partir de chacune des
formes bilinéaires M(., .), C(.,.) et K(.,.),
obtenir les matrices notées respectivement Ms,
Mf, Cf, Cs, Kf , Ks
appelées matrices des masses, des raideurs, d'amortissements et de
couplages définissant la discretisation spaciale du système
(3.9).
ZÙ ?iøj
Mf =
i,j
= fI r?i
· røP-
u2 I (r?0
· r?i)(rñ0
· røj)
i,j
C = u I (r ?0
· r -
u I (r?0
· røj)?i
+ cf f ?iø
i,j
?2
et
Z
Ms i,j = 2åñ
çivj,
s
Z Z
Ks i,j = ñg
çivj + ó rsçi
·
rsvj
s s
Z Z
Cc1
i,j = c2 çiøj
et Cc2
i,j = ñf ?ivj
f s s
Bz) = uq f vs?0
·
vsçiøj et
Bci2= uñ I
Vs?0
· vs?ivj
rs ,jrs
Et le problème approché consiste alors à
trouver un élèment Xh de Vh tel que
:
?Y ? H1(Ù) ×
H1(s) M(
·Xh,Y) + C(
ÿXh,Y) +
K(Xh,Y) = L(Y),
ce qui s'écrit de manière détaillée
sous forme matricielle, en considérant pour tout :
~
? ~X ? H1(Ù)
× H1(s) et Y =
(ø) ? H1(Ù) ×
H1(s) : ç v
|
?
?
|
Mf 0
0 Ms
|
??
? ?
|
? +? Cf -Cc1
??ÿ? +? e. -Bc1 ??
=?0?
? Cc2 T ?çÿ? ?
Bc2 Ks ?Id F
|
Notons que la matrice T est explicitée
après, dans la section Résultats
Numériques.
Ainsi nous obtenons en posant respectivement :

? ? ? ? ?
Cf -Cc1 Kf -Bc1
? , C = ? ? , K = ? ?
Cc2 T Bc2 Ks
et F = [F0,
une équation différentielle matricielle du second
ordre en temps. M kt ozh KXh =
F
Pour pouvoir la résoudre, il faut prendre en compte les
conditions initiales en vitesses et en déplacements.
Pour cela, on construit un interpolé dans Vh du
champ de déplacements initial, X0h, et du
champ à vitesse initial, soit ÿX0h
On impose alors à t = 0 :
Xh(0, x) =
X0h(x),
ÿXh(0,
x) = 10h(x).
4.3 DiscréTisATioN eN TeMps
Dans cette partie, nous allons décrire et analyser la
methode d'intégration numérique de l'équation
différentielle matricielle du second ordre (3.9) avec les conditions
initiales. Nous nous contenterons d'une méthode parmi les plus
usitées.
L'intervalle de temps [0, T] sur lequel on souhaite
évaluer la solution de (3.9) , est partagé en sous intervalles
supposés égaux pour simplifier et de longueur At .
En posant Xn l'approximation obtenue par le
calcul du vecteur X(nAt) à l'instant
nAt on a :
Xn+1 + Xn
X(nAt) =
2
On utilise ensuite différentes estimations des
dérivées Xÿ et
X· à l'instant nAt :
Xn+1 - Xn
ÿX(nAt) =
At
·X(nAt) =
Xn+1 - 2Xn + Xn-1
At2
L'équation différentielle du second ordre est
résolue par un schéma au différences.
)0+1 - 2Xn + Xn-1
)0+1 - )0 Xn+1 + X M ) + C( ) + K( )
= F .
(
At2 At 2
L'avantage de telles méthodes est qu'elles sont moins
coûteuse puisqu'elles ne nécessitent l'évaluation des
inconnues fluide et vague qu'une seule fois par itération en temps.
(At)2 +1
(At)2
[M + AtC + 2
K]Xn [2M + AtC - 2
K]Xn +
[M]Xn-1 =
(At)2F
(4.1)
4.4 ETuDe De LA sTAbiLiTé Du scHéMA
D'iNTégrATioN eN TeMps
ment, on a :
?
???????????? ?
?????????????
trouver XN ? Vh tel que
?Y ? Vh, M( Xn+1 -
2Xn + Xn-1,Y) +C(
Xn+1-Xn
(4.2)
Ät , Y)
Ät2
+K( Xn+12
+Xn , Y) = F(Y).
Posons
Y = Xn+1 -
Xn,
Une démarche similaire que celle de la section 2.4.1,
tout en remarquant que l'opérateur C(.,.) contient des termes
symétriques et des antisymétriques conduit A :
M( Xn+1 - Xn Ät ,
Xn+1 - Xn
Ät ) + 1
Ät(C(Xn+1 -
Xn, Xn+1 - Xn)) +
1 2(KXn+1,
Xn+1)
= M( Xn - Xn-1
Ät , Xn+1 - Xn
Ät ) + 1
2(KXn, Xn).
(4.3) Les termes antisymétriquess de
l'opérateurr C(.,.) s'annulent,, et les termes
symétriquess sont tels que
1 (Cs(Xn+11
--- Xn,, Xn+11 --- Xn)) =>
,
Ätt
L'inégalitée de Cauchy-Schwarz suivante :
(MX, Y)
=<221122(MX,,X))++11(MY,,
Y),
appliquéee au premier terme du second membre de
l'égalitée (4.3), donne :M( Xn -
Xn-1
Ät , Xn+1 - Xn
Ät ) = 1 2 M( Xn -
Xn-1
Ät , Xn -
Xn-1 'Ätt )1 1Xn+1
i- _XnnXn+1 i- _Xnn+ +2M((Ät
t, 'Ätt ),'
on obtient ensuite :2 M( Xn+1 - Xn
+ 2K(Xn+1 ,Xn+1)
1 Ät , Xn+1 - Xn
Ät ) + 1
Ät(C(Xn+1 -
Xn, Xn+1 - Xn)) +
1
11Xnn-_Xn-11Xn n-
_Xn-11=<2M((
Ät t, 'Ätt
).
·
(4.4) Et comme l'opérateurr symétriquee
Cs(.,, .) est positif, alors l'inégalitée
(4.4) donne l'inégalitée :2 M( Xn+1 -
Xn
1 Ät , Xn+1 - Xn
Ät ) + 1
2K(Xn+1, Xn+1) =1 2
M( Xn - Xn-1
Ät , Xn -
Xn-1 'Ätt )
+ 12 K(Xn,,
Xn).
Considérons l'énergie mécanique est
définie par l'expression :
1 Ät , Xn -- Xn--1
En = 2 M( Xn -- Xn--1
Ät ) + 1
2K(Xn, Xn),
nous aboutissons à la même conclusion que dans le
cas dimension c'est-àdire :
En+1 En.
L'energie mécanique totale est décroissante au sens
large au cours du temps, ce qui assure la stabilité de ce schéma
numérique.
N
ous décrivons maintenant les différentes
étapes et l'algorithme de résolution de notre problème.
- Une première étape consiste à
determiner les frontières optimales sur les quelles seront
appliqueés les conditions transparentes. Pour cela, nous allons d'abord
chercher la solution stationnaire q'0 du système (2.7).
Nous pouvons ensuite obtenir à partir des gradients de
cette solution stationnaire la vitesse de l'écoulement. Les lignes de
courants peuvent être defini par la suite en observant au même
instant l'ensemble des points de l'écoulement pendant une durée
assez courte en description lagrangien.
Les frontières optimales seront obtenues alors par
découpage du domaine suivant les courbes équipotentielles
orthogonales aux lignes de courant.
Rappelons que, les deux conditions aux limites (2.34), ne sont
valables que pour une frontière perpendiculaire à la direction de
l'écoulement, c'est-à-dire pour des écoulements dont les
champs de vecteurs vitesses sont colinéaires à la normale
sortante de la frontière considerée. Ainsi, pour un
écoulement quelconque avec une frontière curviligne quelconque,
l'apparition des composantes tangentielles de la vitesse de l'écoulement
sur la frontière considérée entraîne des
difficultés supplémentaires que nous n'abordons pas dans ce
travail.
- Dans un second temps, nous appliquons la condition aux
limites au cas d'un écoulement transitoire.
- Et enfin, une extension au équations des vagues
progressives sera étudiée. Les calculs sont effectués dans
un cadre bidimensionnel et les scripts de simulation sont
développés en langage Python.
5.0.1 Solution stationnaire
Nous nous plaçons dans le cas d'écoulement
potentiel et incompressible. Nous avons donc à resoudre le
système suivant définit au (2.7) :
? ?????????
?????????{
-Ä?0o = 0 dans
Ù,,???0o=
=0 0sur r0 o? Ub b? us,,??0" =
(e1,, U) sur 1i ?u 2,,
?ív
ou ?0 est définie à constante près,
que nous fixons en prenant la condition de moyenne nulle sur
s :
Z
?0 = 0. s .L'espace des fonctions test
consideré pour la formulation variationnelle de
ce problème sera :
H1(Ù)) = {v/v ?E
L2(Ù)// ?kvv ?E L2(Ù)}}
et la formulation variationnelle est :
Z Z Z ??0
?ø ? H1(Ù); - Ù
Ä?0ø = Ù r?0rø -
?í ø,
?Ù
??0
en tenant compte des valeurs de sur les frontières de
l'ouvert Ù, on
?í
a :
Z Z
?ø ? H1(Ù); Ù
r?0rø = u ø,
1?2 '
Le problème à resoudre devient :
|
?
???
???{
|
Trouver ?0o ?E H1(Ù)) telle
que :
Z Z
Ù r?0rø = u
ø , ?ø ? H1(Ù).
1?2 2
|
Ce problèmee admet bien une solution unique. Pour s'enn
assurer, nous vérifionss les hypothèsess du
théorèmee de Lax-Milgram.
Commençonss par montrer :Z
la continuité de la forme bilinéaire :
a(?0, ø) = Ù r?0rø
lZ
|a(?0, ø)| = | Ù
r?0rø| =
kr?0kL2(Ù) ×
krøkL2(Ù) =
|?0H1(Ù)||øH1(Ù)|
l
=
1?01L2(Ù)1ø1L2(Ù).
·
Ainsi :
La forme bilinéaire a(.,.) est donc continue sur
H × H et elle est H-coercive.
Montrons maintenant la continuité de la fonctionnelle
Z
l(ø) = u ø :
1?2
|l(ø)|= ~ ~u(f 2
ø - f 1 ø) ~~~ = u(k Z
øIIL2(Ù) + 11
øIIL2(Ù))
1 2
= u(køkL2(1) +
IøIIL2(2)) Cauchy-Schwarz
= u(c1 +
c2)IIøIIH1(Ù) par
l'inégalité de Trace
d'où :
|l(ø)| = u(c1 +
c2)IIøIIH1(Ù), avec
c1 , c2 et u des constantes
Ainsi l'existence et l'unicité de solution au
problème (2.7) sont démontrées.
Les figures (5.1) et (5.2) montrent les solutions obtenues
avec deux maillages contenant respectivement une structure symétrique et
non symétrique. Pour ce calcul nous avons considérer une vitesse
d'écoulement de U = 0.01m.s-1.
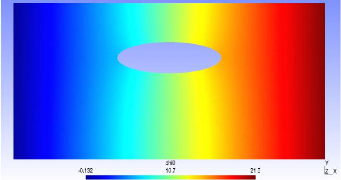
FIGURE 5.1 - Résultat avec stucture symétrique
: une ellipse.
La différence est significative au niveau de la
répartition des champs de vitesse autour des structures.
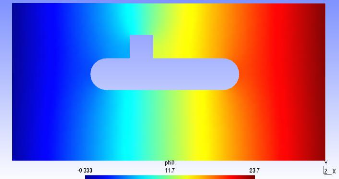
FIGURE 5.2 - Résultat avec stucture non
symétrique :un sous-marin.
5.0.2 Frontières adaptées
Dans cette section nous nous intéressons à la
construction numérique des nouvelles frontières adaptées
définies dans le troisième chapitre. En partant d'un noeud du
mailage situe à l'interface représentant la surface libre du
domaine, calculer le gradient de la solution stationnaire q'0,
déterminer l'intersection du vecteur directeur de la droite orthogonale
à la ligne de courant passant par ce noeud avec les segments des
éléments P1 ( triangles) ayant en commun ce noeud.
Ensuite à partir de ce point, nous calculons à
nouveau le gradient q'0 et déterminons l'intersection du
vecteur directeur de la droite orthogonale à la ligne de courant passant
par ce noeud avec les autres segments de l'élément ainsi de suite
jusqu'à la frontière représentant le fond du domaine. En
partant d'un noeud de la surface libre non loin de la structure, nous obtenons
une courbe représentant la courbe équipotentielle.
La figure (5.3) présente un exemple
d'équipotentielles obtenus pour une vitesse d'écoulement U
= 0.01m.s-1, avec un domaine contenant un
sousmarin.
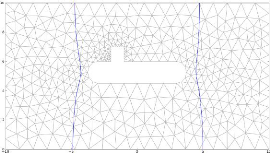
sont presque parallèles aux frontières
latérales du domaines, ce qui est normal car l'écoulement est
presque uniforme .
Nous pouvons alors découper nos domaines de calcul
suivant les équipotentielles. Ce choix permet d'obtenir des
frontières adaptées que nous notons respectivement par 1 et 2 sur
les quelles nous pouvons désormais appliquées la condition aux
limites transparentes.
Notons que sur ces frontières la composante
tangentielle du gradient de q'0 dans le repère local lié
à ces frontières est nulle. De ce fait, la vitesse
d'écoulement est supposée orthogonale à ces
frontières.
Les figures (5.4) et (5.5) présentent les maillages
obtenus avec les nouveaux domaines découpés suivant les
frontières optimales pour une vitesse d'écoulement U =
0.01m.s-1.
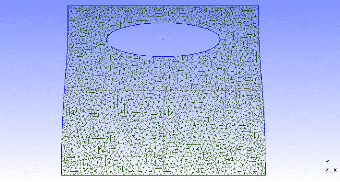
FIGURE 5.4 - Maillage du domaine découpé avec
une ellipse à l'intérieur.
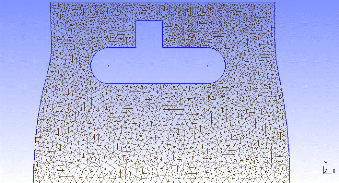
FIGURE 5.5 - Maillage du domaine découpé avec
un sous-marin à l'intérieur.
5.0.3 Conclusion
Ces deux chapitres sont consacrés à la
présentation des outils numériques Gmsh et Getfem++
utilisés dans cette étude.
Au cours de ces chapitres, nous avons détaillé le
schéma permettant de résoudre numériquement
l'équation du modèle.
Nous avons aussi explicité la méthode
utilisée pour le découpage du domaine de calcul suivant les
frontières obtenues à partir des lignes de courant et des
équipotentielles de l'écoulement potentiel autour d'une ellipse
et d'un sous-marin.
Deux maillages du domaine contenant ces deux structures (une
ellipse et un sous-marin) sont obtenus.
Dans le dernier chapitre, nous présentons les
résultats numériques obtenus avec ces deux maillages.
N
ous présentons ici l'algorithme permettant de passer,
d'un maillage produit par le logiciel Gmsh à partir d'un
domaine optimal, au
calcul des différentes matrices par le logiciel
Getfem + + à un résulat sous forme d'un
écoulement autour d'une structure et d'une déformation
ondulatoire de la surface libre au cours du temps.
Le code est articulé autour d'un programme principal
Main.py , qui fait appel à chaque fragment de
programme nécessaire.
La figure ci-dessous en montre le fonctionnement
général.
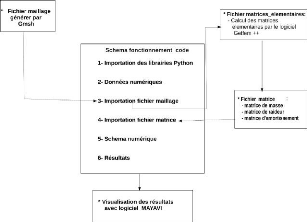
FiGuRE 6.1 - Schema de fonctionnement.
Dans un premier temps, Main.py fait appel aux
différentes librairies de calcul scientifique de Python . Il
réalise ensuite les opérations suivantes : - importation du
maillage,
- calcul des matrices globales de, masse, raideur,
d'amortissement, - initialisation des variables.
Le programme lance ensuite le processus itératif. Et au
cours d'une itération les opérations suivantes sont
effectuées :
- calcul du potentiel de vitesse ? ,
- calcul du déplacement normale de la surface libre
ç .
6.0.4 Modèle sans couplage avec les vagues
Avant d'utiliser notre conditions aux limites transparentes
dans un procédé de couplage avec les équations de vagues
progressives, il convient de la tester à un modèle
d'écoulement transitoire autour d'une structure avec une condition de
type equation de vague:
?? ??
g?í (s, t) +
?t (s, t) = 0, sur
s×]0, T[. (6.1)
appliquée à la surface libre
s.
Cela permet non seulement de se rassurer quant à la
validité de cette condition aux limites et aussi de bien comprendre
l'influence de certains paramètres tels que, la profondeur de la
structure dans le fluide et la qualité des maillages utilisés.
6.0.5 Résultats numériques
Notre exemple donné ci-après est obtenu avec le
domaine optimale représenté par la Figure 5.4
Le domaine est discrétisé en 42020 points et les
frontières en 1027 points. La résolution du problème
à potentiel par la méthode des élèments finis nous
donne le potentiel des vitesses.
Pour cette application numérique, la
célérité de l'onde dans le fluide est cf =
1000m.s-1 , la vitesse d'écoulement
uniforme en amont à l'infini est u =
1.5m.s-1,
Les conditions initiales concernant le fluide, imposées
à la surface sont les suivantes :
IIx-x0112
L si 0 = IIx - x0112 =
R,
Ae
?
øinit(x) = ??????? ???????
0 si IIx - x0112 = (R +
A),
(1 - Mx-x0M2
(R+A) )e-
IIx-x0II2
L si R = lix -
x0112 = (R + A).
Avec x = (x1, x2) ? 2,
A et R des constantes et L, représente la
longueur du bassin.
Les figures ci-après illustrent une représentation
du potentiel de vitesse instationnaire caractérisant l'écoulement
dans le fluide.
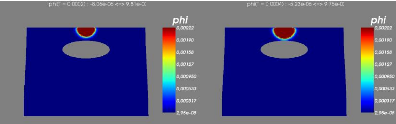
FIGURE 6.2 - Step 1-2 :Ecoulement transitiore, avec condition
aux limites transparentes sur les frontières latérales.
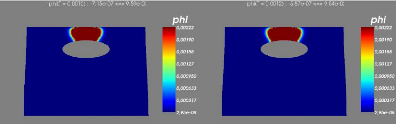
FIGURE 6.3 - Step 3-4 :Ecoulement transitiore, avec condition
aux limites transparentes sur les frontières latérales.
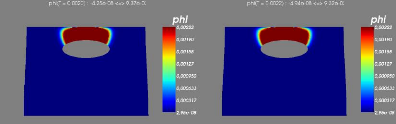
FIGURE 6.4 - Step 5-6 :Ecoulement transitiore, avec condition
aux limites transparentes sur les frontières latérales.
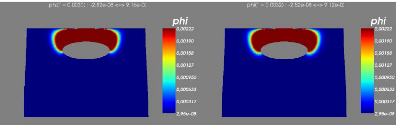
FIGURE 6.5 - Step 7-8 :Ecoulement transitiore, avec condition
aux limites transparentes sur les frontières latérales.
Les premières série de tests, montrent une
symétrie du sillage de l'écoulement de par et d'autre de la
structure.
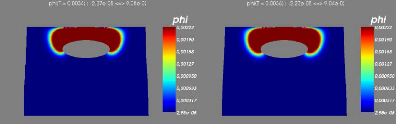
FIGURE 6.6 - Step 9-10 :Ecoulement transitiore, avec
condition aux limites transparentes sur les frontières
latérales.
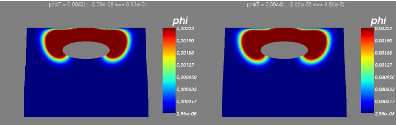
FIGURE 6.7 - Step 11-12 :Ecoulement transitiore, avec
condition aux limites transparentes sur les frontières
latérales.
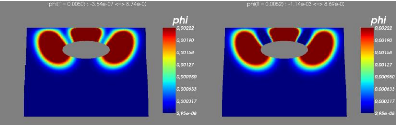
FIGURE 6.8 - Step 13-14 :Ecoulement transitiore, avec
condition aux limites transparentes sur les frontières
latérales.
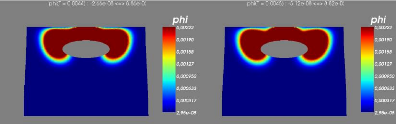
FIGURE 6.9 - Step 15-16 :Ecoulement transitiore, avec
condition aux limites transparentes sur les frontières
latérales.
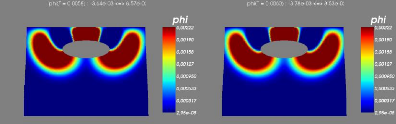
FIGURE 6.10 - Step 17-18 :Ecoulement transitiore, avec
condition aux limites transparentes sur les frontières
latérales.
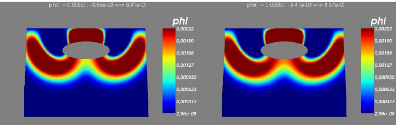
FIGURE 6.11 - Step 19-20 :Ecoulement transitiore, avec
condition aux limites transparentes sur les frontières
latérales.
Nous remarquons que la forme géométrique du silage
de l'écoulement n'est pas modifiée aux bords des
frontières latérales.
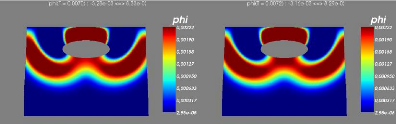
FIGURE 6.12 - Step 21-22 :Ecoulement transitiore, avec
condition aux limites transparentes sur les frontières
latérales.
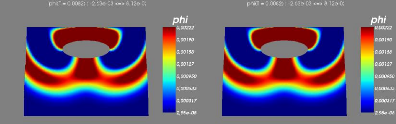
FIGURE 6.13 - Step 23-24 :Ecoulement transitiore, avec
condition aux limites transparentes sur les frontières
latérales.
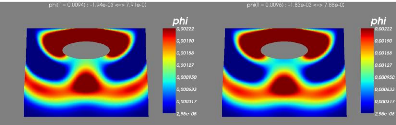
FIGURE 6.14 - Step 25-26 :Ecoulement transitiore, avec
condition aux limites transparentes sur les frontières
latérales.
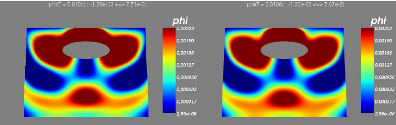
FIGURE 6.15 - Step 27-28 :Ecoulement transitiore, avec
condition aux limites transparentes sur les frontières
latérales.
Les figures précedentes confirment parfaitement bien la
notion de "limite transparente" sur les frontières latérales. On
observe en effet, la non réflexion d'onde sur ces frontières.
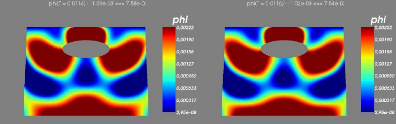
FIGURE 6.16 - Step 29-30 :Ecoulement transitiore, avec
condition aux limites transparentes sur les frontières
latérales.
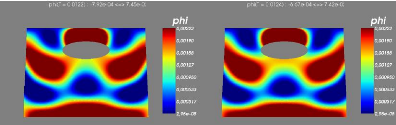
FIGURE 6.17 - Step 31-32 :Ecoulement transitiore, avec
condition aux limites transparentes sur les frontières
latérales.
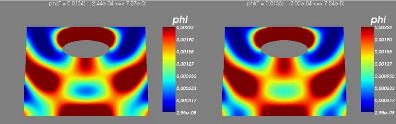
FIGURE 6.18 - Step 33-34 :Ecoulement transitiore, avec
condition aux limites transparentes sur les frontières
latérales.
Sur ces résultats, nous avons une réflexion
d'onde au fond du domaine et nous visualisons bien les ondes
piègées entre la structure et le fond du domaine . Ceci est
dû à la condition de Neumann appliquée au fond dans cette
application.
6.0.6 Conclusion
Cette étude a montré la faisabiité de la
mise en oeuvre de la condition aux limites transparentes sur un cas
transitoire. Les solutions obtenues
sont satisfaisantes.
Le choix de l'utilisation de la condition de Neumann au fond
du bassin plutôt qu'une condition transparente à permis de
visualiser d'une par les ondes piègées et d'autre part de
vérifier l'algorithme développé.
6.0.7 Modèle avec couplage avec les vagues
L'objectif suivant est de coupler ce modèle avec le
modèle de vague à la surface.
Cependant, ce objectif ne peut pas être atteint sans
difficulté. Premièrement, les frontières de la surface
libre Fs sont réduit en des points
géometrique conduisant à une singularité. Ainsi il est
difficile de définir analytiquement une conditions aux limites
adaptée en ce deux points.
Et par soucis de simplification, nous appliquons pour les
differentes expériences numériques, une condition aux limite de
type:
= 0 au point géometrique situé à gauche de
la frontière
?ç
-
?ís
?Fs de Fs ,
- et au point géometrique situé à droite de
cette frontière, nous im-
?ç ?ç
posons : + cr = 0 .
?t ís
cr est la vitesse de ride et
determinée par la relation:
r ó
cr =2eñ,
avec
- ó = 7.5 × 10-3 : la constante
de capillarité,
- ñ = 103 : masse volumique de
l'eau.
De cette relation, nous obtenons une valeur numérique
de l'épaisser de la surface capillaire, en supposant que la vitesse de
ride est égale à la vitesse de l'écoulement du fluide
u.
Ce qui nous donne une expression de la constante e sous
la forme:
e =
ó
2u2ñ
De ce fait, la matrice T intervenant dans la matrice
d'amortissement notée C est une matrice carrée dont la
dimension est égale au carré du nombre de noeud sur la
frontière Fs et contenant un seul élement
définie comme suit:
0 ... 0 0
T= ... ... ...
0 ... 0 0
0 ... 0 u
Deuxièment, la présence des différentes
ondes (ondes de gravité , on-des acoustique et ondes de
capillarité) entrainent une grande disparité des vitesses d'ondes
et de celle du bateau conduit à des difficultés
numériques, que nous surmontons en utilisant un schéma
d'intégration en temps adapté (4.1).
6.0.8 Résultats numériques
L'algorithme des simulations numériques que nous
présentons ciaprès sont très similaires aux
précedentes, la différence majeur étant le couplage avec
les équations de vagues et l'application d'une condition aux limites
transparentes au fond du bassin (I'0) pour éviter les ondes
piègées entre le fond de la structure et le fond du bassin.
Dans un premier temps, nous utilisons le même maillage
que dans le cas précedent avec la même structure (une ellipse) et
les mêmes données numériques. La condition initiale
étant la même, mais cette fois-ci définie sur la
structure.
Ensuite, nous présentons les résultats
numériques pour un domaine con-tenant un sous-marin.
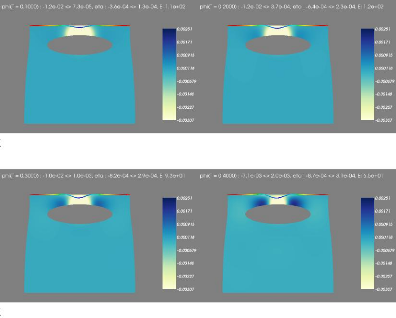
FIGURE 6.19 - Step 1-2 : couplage avec les vagues
FIGURE 6.20 - Step 3-4 : couplage avec les vagues
Pour le domaine contenant une ellipse, nous avons les
figures suivantes
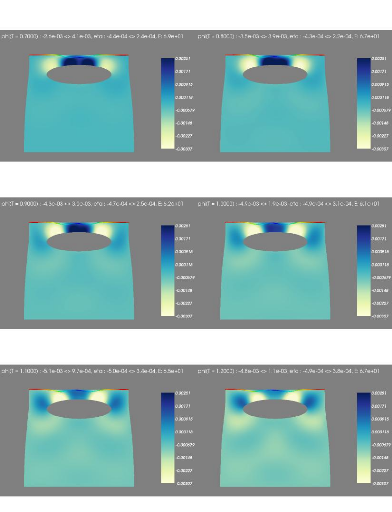
FIGURE 6.21 - Step 5-6 : couplage avec les vagues
FIGURE 6.22 - Step 7-8 : couplage avec les vagues FIGURE 6.23 -
Step 9-10 : couplage avec les vagues FIGURE 6.24 - Step 7-8 :
couplage avec les vagues
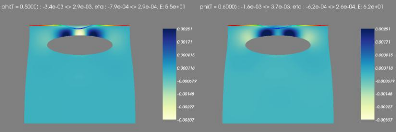
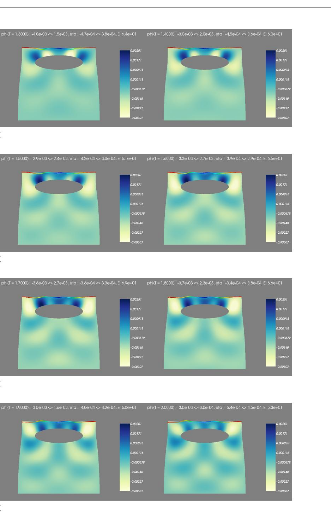
73
FIGURE 6.25 - Step 13-14 : couplage avec les vagues
FIGURE 6.26 - Step 15-16 : couplage avec les vagues FIGURE 6.27 -
Step 17-18 : couplage avec les vagues FIGURE 6.28 - Step 9-10 :
couplage avec les vagues
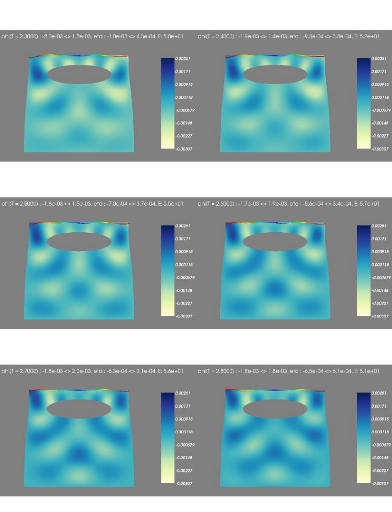
FIGURE 6.29 - Step 21-22 : couplage avec les vagues
FIGURE 6.30 - Step 11-12 : couplage avec les vagues FIGURE 6.31 -
Step 13-14 : couplage avec les vagues FIGURE 6.32 - Step 15-16 :
couplage avec les vagues
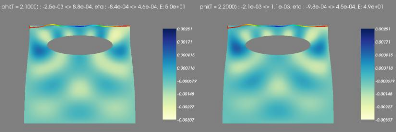
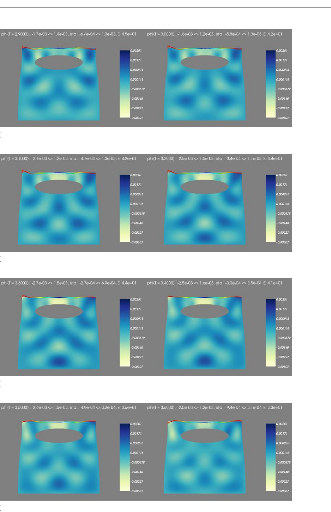
FIGURE 6.33 - Step 29-30 : couplage avec les vagues
FIGURE 6.34 - Step 31-32 : couplage avec les vagues FIGURE 6.35 -
Step 17-18 : couplage avec les vagues FIGURE 6.36 - Step 19-20 :
couplage avec les vagues
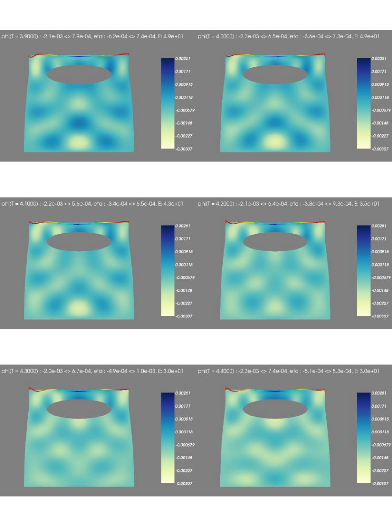
FIGURE 6.37 - Step 37-38 : couplage avec les vagues
FIGURE 6.38 - Step 21-22 : couplage avec les vagues FIGURE 6.39 -
Step 23-24 : couplage avec les vagues FIGURE 6.40 - Step 43-44 :
couplage avec les vagues
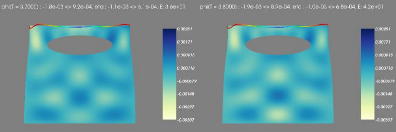
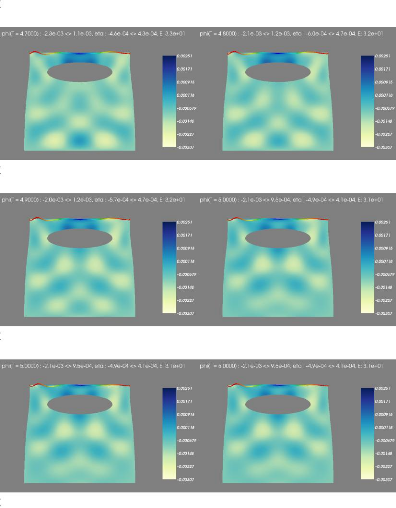
FIGURE 6.41 - Step 25-26 : couplage avec les vagues
FIGURE 6.42 - Step 27-28 : couplage avec les vagues FIGURE 6.43 -
Step 29-30 : couplage avec les vagues FIGURE 6.44 - Step 29-30 :
couplage avec les vagues
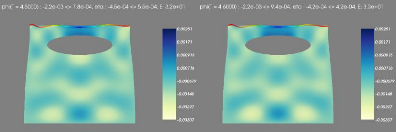
dynamique produit par la source et la forme de la structure.
Nous avons aussi l'existence d'ondes à la surface de
l'eau (les vagues) due, d'une part à la pesanteur qui tend à
maintenir l'interface air-eau horizontale (ondes de gravité), et d'autre
part à la tension de surface qui tend à maintenir l'interface
plane (onde capillaires).
D'autre part, l'amplitude des réflexions parasites des
ondes sur les frontières latérales sont minimiser par l'effet
transparent de la condition aux limites transparentes appliquées sur ces
frontières.
Valeurs propres
Considérons toujours le domaine contenant une ellipse
avec les frontières adaptées (cas précédent).
L'étude de la stabilité du système consiste à
étudier les valeurs propres de l'opérateur de raideur
K(.,.) obtenu après couplage :
ZK(X, Y) = Ù[c2
f V?(x)
·
Vø(x) - (V?0(x)
·
V?(x))(V?0(x)
·
Vø(x))]dx
Z
+ c2
[Vs?0(s)
·
Vs?(s)v(s) -
Vs?0(s)
·
Vsç(s)ø(s)]ds
f s
Z Z
+ gc2
ç(s)v(s)ds + óa
Vsç(s)
·
Vsv(s)ds,
f s s
dont la matrice est :
|
?
K = ?
|
Kf -Bc1 Bc2
Ks
|
?
? .
|
Pour cette étude, nous-nous intéressons à
la première valeur de la vitesse de l'écoulement u, pour
laquelle la plus petite valeur propre notée ëmin est
négative (ëmin = 0). Nous avons appelée cette
vitesse, vitesse critique et notée uc.
Des simulations numériques montrent l'instabilité
du modèle lorsque la vitesse u est supérieure à
la vitesse critique.
C'est la vitesse à partir de laquelle le modèle
peut devenir instable.
La figure suivante donne l'allure de la courbe
représentant les valeurs de la plus petite valeur propre obtenue en
fonction des vitesses d'écoulement.
Les calculs sont faits pour des données suivantes :
fluide
- masse volumique du fluide ñ = 1000
kg.m-3 - intensité pésanteur g
= 9.8 m.s-2
- coefficient de tension superficiel ó = 0.075
N.m-1 Le domaine plus la structure (ellispe) est
maillé en :
- 85075 élèments triangles
- contient 42020 noeuds intérieurs
- et 1027 noeuds sur les frontières.
On observe que uc
0.18m.s-1 ce qui signifie qu'au dessus de cette
valeur le modèle peut être instable.
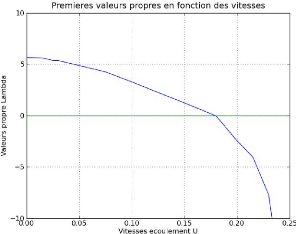
FIGURE 6.45 - Courbe des valeurs propres en fonction des
vitesses
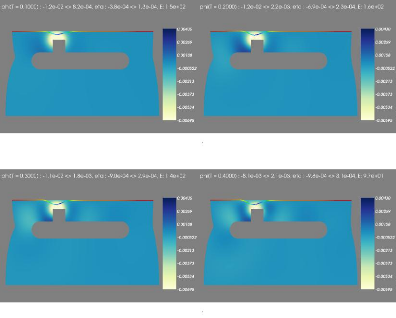
FIGURE 6.46 - Step 1-2 : couplage avec les vagues
FIGURE 6.47 - Step 3-4 : couplage avec les vagues
Pour le domaine contenant un sous-marin.
Les simulations numériques que nous présentons
dans cette section sont très similaires aux précedentes, la
différence majeure étant que la structure immergée est
remplacée par un sous-marin.
Ainsi, nous avons les figures suivantes :
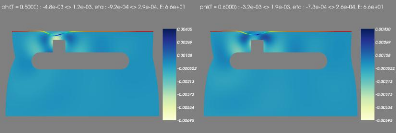
FIGURE 6.48 - Step 5-6 : couplage avec les vagues
Nous observons sur les premières figures l'apparition des
ondes de surface
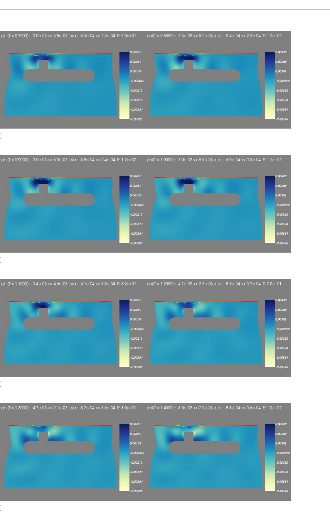
81
FIGURE 6.49 - Step 7-8 : couplage avec les vagues
FIGURE 6.50 - Step 7-8 : couplage avec les vagues
FIGURE 6.51 - Step 11-12 : couplage avec les vagues
FIGURE 6.52 - Step 9-10 : couplage avec les vagues
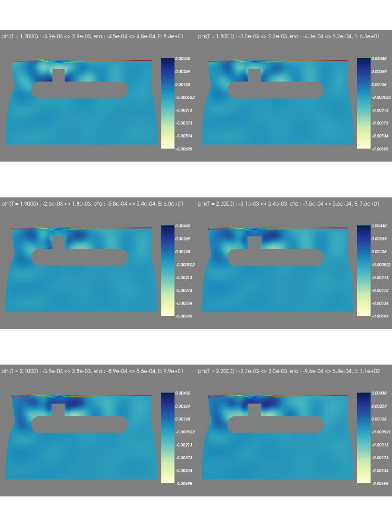
FIGURE 6.53 - Step 15-16 : couplage avec les vagues
FIGURE 6.54 - Step 17-18 : couplage avec les vagues FIGURE 6.55 -
Step 11-12 : couplage avec les vagues FIGURE 6.56 - Step 21-22 :
couplage avec les vagues
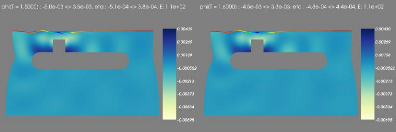
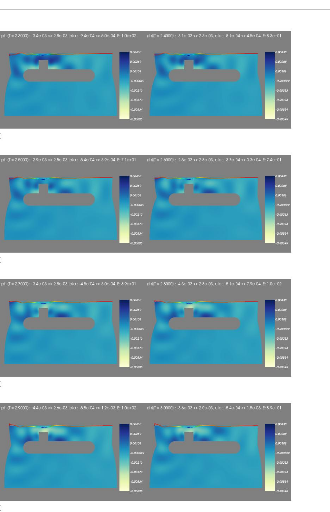
FIGURE 6.57 - Step 13-14 : couplage avec les vagues
FIGURE 6.58 - Step 25-26 : couplage avec les vagues FIGURE 6.59 -
Step 15-16 : couplage avec les vagues FIGURE 6.60 - Step 29-30 :
couplage avec les vagues
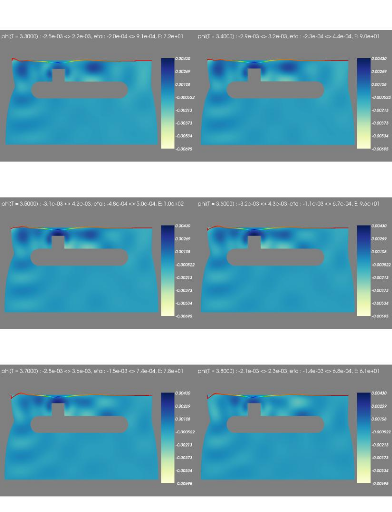
FIGURE 6.61 - Step 31-32 : couplage avec les vagues
FIGURE 6.62 - Step 17-18 : couplage avec les vagues FIGURE 6.63 -
Step 19-20 : couplage avec les vagues FIGURE 6.64 - Step 37-38 :
couplage avec les vagues
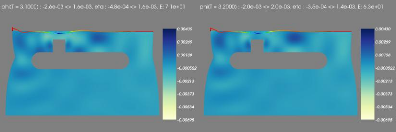
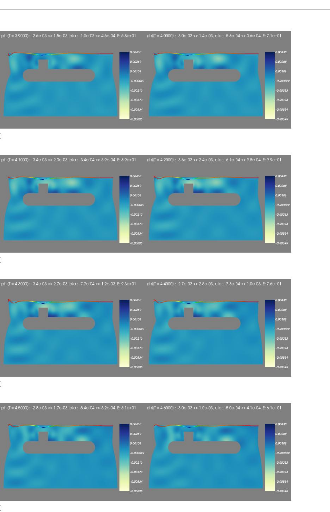
85
FIGURE 6.65 - Step 21-22 : couplage avec les vagues
FIGURE 6.66 - Step 41-42 : couplage avec les vagues FIGURE 6.67 -
Step 23-24 : couplage avec les vagues FIGURE 6.68 - Step 45-46 :
couplage avec les vagues
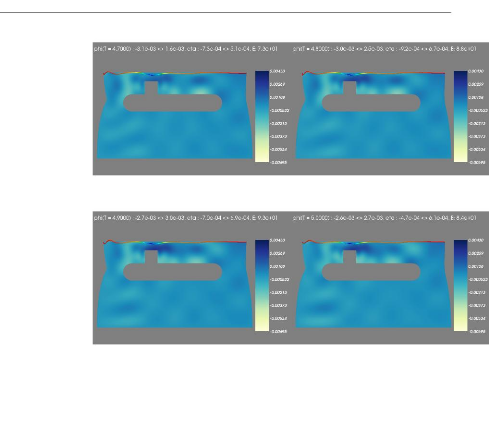
86 Chapitre 6. Résultats numériques
FIGURE 6.69 - Step 25-26 : couplage avec les
vagues
FIGURE 6.70 - Step 49-50 : couplage avec les vagues
Conclusion
Ici encore les résultats sont concluantes et sont presques
analogues à ceux obtenus dans la simulation précedente.
En effet, on observe les sillages hydrodynamiques autour du
sous-marin
et les vagues à la surface, ce qui semble correct du point
de vue physique.
6.0.9 Stabilité du modèle : modes propres
Nous nous intéressons au problème des valeurs
propres obtenu à partir de l'opérateur de raideur
K(.,.), qui consiste à :
|
? ??
??
|
trouver (A, X) E R x
H1(Ù) x
H1(s) tel que : (K0 + U
K1 - U2 K2)X = AX,
|
C'est une équation matricielle du second ordre en
U, avec
Z Z Z
K0 = c2 Ù Vq(x)
· Vp(x)dx + gc2
ij(s)v(s)ds + aa
Vsij(s)
·
Vsv(s)ds,
f f s s
Z Z
K1 = c2
Vsq(s)v(s)ds -
c2
Vsij(s)p(s)ds,
f f
Z s s
K2 = c2 Ù Vq(x)
· Vp(x)dx. f
On a tracé plusieurs courbes en fonction de U
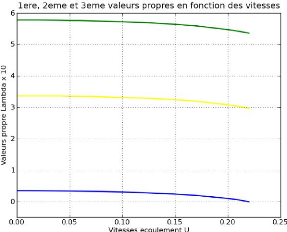
FIGURE 6.71 - Courbe des valeurs propres en fonction des
vitesses
D
Ans ce travail d'ingénieur, nous nous sommes
intéressés de la modélisation d'une condition aux limites
transparentes pour un écoulement
transitoire permetttant de mettre en oeuvre un modèle
de simulation hydrodynamique de sillage de bateau en milieu infini.
L'intérêt de ce travail est de permettre une
modélisation non-lineaire du comportement de la surface de l'eau tout en
évitant les phénomènes de réflections d'ondes qui
apparaissent habituellement lorsqu'on utilise une modélisation
classique, sur un ouvert de calcul borné.
Pour réaliser cette étude nous avons suivi la
démarche suivante :
- tout d'abord, une modélisation mathématique
du problème acoustique en écoulement uniforme et du modèle
de Kelvin-Neumann en prenant en compte la capillarité, la gravité
et pression de l'eau, a été établie.
- Puis une analyse mathématique de la condition aux
limites transpar-
entes sur les frontières verticales en amont et en
aval a été réalisée.
- Enfin, la simulation numérique du modèle
fluide-vague à la surface avec une condition aux limites transparentes
sur les frontières a été mise en oeuvre.
Nous avons appliqué cette méthode aux
problèmes de la propaga-
tion acoustique dans un domaine contenant de l'eau en
écoulement uniforme dans lequel est immergé une structure
à section constante. Une formulation variationnelle du problème
considéré avec la condition aux limites transparentes sur les
frontières optimales du domaine a été faite. Ensuite
l'existence et l'unicité de la solution de ce problème sont
établies en fonction de la vitesse critique.
Une approche numérique a enfin été
présentée. Dans un premier temps, nous avons
considéré une structure à section symétrique (une
ellipse) pour vérifier nos modèles puis nous avons élargi
le problème à un sous-marin. Cette approche numérique a
permis d'une part, dans le cadre du problème couplé de mettre en
évidence les phénomènes suivants :
- les ondes de surfaces qui apparaissent grâce d'une
part à la pesanteur qui tend à maintenir l'interface air-eau
horizontale et d'autre part la tension de surface qui tend à maintenir
l'interface plane.
- Le phénomène de non réflection d'onde
en amont et en aval de l'é-
coulement , ce qui se traduit le comportement à
l'infini de l'onde.
D'autre part de montrer que le système est stable
tant que la vitesse
de l'écoulement est inférieure à la vitesse
dite critique.
Enfin, Une seconde poursuite à ce travail pourrait
évidemment porter
sur l'extension au cas tridimensionnel. Cela
nécessitera en particulier la
généralisation de ces résultats à
un écoulement non uniforme sur des domaines de différentes
configurations.
Il serait également intéressant d'étendre
ces résultats au cas d'un bateau de surface avec tossage (Th. Gazzola
[13]).
8
ANNEXE
8.1 RAppEL DEs OutiLs mAthémAtiquEs Les espaces
fonctionnels
Commençons par rappeler les définitions classiques
des espaces fonctionnels les plus courants.
Nous noterons Ù un ouvert borné de
IRn (n = 1,2, ou 3). Sa frontière
est désignée par ?Ù et supposée au moins
de classe C1 par morceaux et globalement lipschitzienne.
- Espace de Banach
L1(Ù)
Il s'agit de l'espace des fonctions à valeurs
réelles, mesurables au sens de Lebesgue sur l'ouvert Ù et dont
l'intégrale du module sur Ù est finie.
L1(Ù) = {v : Ù ?
Rn mesurable / I| v|
(x)dx < 8}
ca
Cet espace est muni de la norme :
v ? L1 (Ù)
ilvil0,1,Ù = f
?
ca |v|(x)dx
- Espace L2(Ù)
Il s'agit de l'espace des fonctions à valeurs
réelles, mesurables au sens de Lebesgue sur l'ouvert Ù et dont
l'intégrale du carré du module est finie sur Ù.
L2(Ù) = {v : Ù ?
Rn mesurable /
I|v(x)|2dx < 8}
ca
Cet espace est un espace de Hilbert muni du produit scalaire
:
u, v ? L2(Ù) ?
(u, v)0,Ù = I
cu(x)v(x)dx
et dont la norme associée est :
v ? L2(Ù) ?
11v110,Ù = (I.
|v(x)|2dx)12.
- Espace Hk(Ù)
On désigne par Hk(Ù) l'espace
de Sobolev d'ordre k définit par :
Hk(Ù) = {v ?
L2(Ù)/Dáv ?
L2(Ù), |á| < k}
où Dáv est la
dérivée de v au sens de distributions . De plus on notera
Hk0(Ù) = {v ?
Hk(Ù)/v = 0 sur ?Ù}
- Espace H1(Ù) Il
est défini par :
H1(Ù) = {v/v
? L2(Ù)/ ?kv ?
L2(Ù)}
où ?k est la dérivée partielle par
rapport à xk et est muni de la norme :
v ? H1(Ù), ?
kvk1,Ù = {lv120,Ù + ?
k?kvk2 0,Ù}1 2
k=1,n
C'est un espace de Hilbert dont le produit scalaire est :
u, v ? H1(Ù) =
f u(x)v(x)dx + ? f
?ku(x)?kv(x)dx
k=1,n
On a, aussi l'espace : - Espace
H2(Ù)
Il est défini par :
H2(Ù) = {v/v ?
H1(Ù) / ?ikv ?
L2(Ù) i, k ? {1,2,3}}
Théorème de trace
Dans la mesure où nous cherchons à
étudier des problèmes aux limites, nous aurons besoin de
connaître le comportement des fonctions de
H1(Ù) au voisinage du bord de Ù.
Il n'est pas évident que cette question ait un sens les
fonctions de L1(Ù) sont définies presque
partout.
Or le bord est une « variété »de
dimension n - 1 si Ù ? IRn.
Disons simplement que dans le cas qui nous intéresse, il
s'agit de la généralisation d'une surface dans 1R3.
En particulier, est de mesure nulle, et il n'est pas possible
de définir la restriction d'une fonction quelconque de
L2(Ù) à .
Toutefois, la régularité supplémentaire
des fonctions de H1(Ù) permet de définir
cette restriction. Plus précisément, nous avons le
résultat suivant. Théorème de trace
Soit Ù un ouvert borné régulier, de
frontière . On définit l'application trace ã0
:
H1(Ù) n C(Ù) ?
L2() n C()
v ? ã0(v) = v
(8.1)
Cette application se prolonge par continuité en une
application linéaire continue de H1(Ù)
dans L2(), encore notée ã0.
En particulier, il existe une constante c > 0 telle
que, pour toute fonction v ? H1(Ù), on a
Iv/IL2() =
cIvIH1(Ù) (8.2)
Il est naturel de vouloir identifier le noyau de l'application
trace ã0, noté usuellement
H10(Ù).
En effet, H10(Ù) est le sous-espace
des fonctions de H1(Ù) «qui s'annulent sur le
bord ».
H10(Ù) = {v/v
? H1(Ù)/ v=0 sur }
C'est un espace de Hilbert, muni de la semi-norme
définie sur H10(Ù)
par :
Z
2
|v|H1 0(Ù) = ( Ù
|rv(x)|2dx)1
qui est une norme sur H10(Ù)
,équivalente à la norme de H1(Ù)
Théorème de Green
Le flux d'un champs de vecteurs, sortant d'une surface
fermée S, est égal à l'intégrale de la
divergence de ce champ étendue au volume Ù limité par
S :
ZS
Vnds = I Ù
div(V)dv (Stokes)
LEMME DE GREEN
Soient u,v deux fonctions telles que u ?
H2(Ù) et v ? H1(Ù).
On a alors
ZÙ
Z Z
Äuv = (8.3)
?Ù v?u
?í - Ù ru.rv,
où ?í désigne la
dérivée normale le long de la frontière ?Ù
de l'ouvert ?
Ù.
Théorème de Reynolds
La formule de Leibniz permet de différencier par rapport
au temps des intégrales, dont les bornes sont fonctions du temps.
En dimension un, cette formule s'écrit :
Z b(t) Z b(t)
d ? f (x, t)
a(t) f (x, t)dx
= ?t dx + f
(b(t))db
dt - f
(a(t))da
dt a(t) dt
Elle se généralise à des intégrales
multiples (c'est-à-dire des intégrales sur des volumes au lieu
d'intégrales sur des intervalles).
On obtient la relation suivante appelée «
théorème de transport».
Z Z Z
d ? f
V f dV = ?t dV + S f
u.ídS, (8.4)
dt V
- où V est un volume de contrôle contenant
une certaine masse de fluide,
- S est la surface enveloppant ce volume,
- et v est la normale à la surface
S,
- la normale v est unitaire (|v| = 1) et
orientée vers l'extérieur. Cette relation peut
s'interpréter de la façon suivante :
La variation temporelle d'une quantité f
définie sur un volume de contrôle V est égale
à la somme de :
1. la variation de f au cours du temps au sein du
volume de contrôle (variation dite locale);
2. le flux de f à travers la surface S
enveloppant le volume de contrôle ( flux = ce qui entre - ce qui sort de
V).
Autre formulation du théorème de transport en
utilisant le théorème de Green-Ostrogradski :
d fdV = I (a +
(2.4.2)
d t iv v at (8.5)
Théorème de Lax-Milgram
Soit V un espace de Hilbert réel dont la norme
est notée k.kV et a(.,.) une forme bilinéaire sur
V vérifiant :
i- Continuité : ?M > 0, ?u,
v ? V, |a(u, v)| =
MIulVIvIV,
ii- V-coercivité : ?a > 0, ?v ?
V, a(v, v) =
aIvI2V
Alors pour tout forme linéaire continue sur l'espace V
(c'est-a-dire dans l'espace dual V' de V ),
notée l , il existe une solution unique u dans V du
modèle variationnel suivant :
?v ? V, a(u, v)
= l(v).
En outre nous avons l'inégalité suivante :
.
klkV0
kukV = a
oil la norme sur VI est définie par
:
IlvIlV.
11l11v = supv?V
l(v)
Théorème spectral
Soient :
- a(., .) une forme bilinéaire symétrique
positive et équivalente au carré de la norme sur un espace de
Hilbert V,
- m(., .) une forme bilinéaire symétrique
positive et équivalente au carré de la norme sur un espace de
Hilbert H.
On considère le problème de valeurs propres :
(u, A) ? V × IR, ?v
? V, a(u, v) = Am(u,
v), m(u, u) = 1.
8.2 EQuATioNs DE LA mécANiQuE DEs fLuiDEs
Les lois de la mécanique s'écrivent selon le
type de description choisie, mais elles expriment les mêmes principes.
Ces principes sont au nombre de trois :
- la masse se conserve;
- la variation de quantité de mouvement (masse×
vitesse) est égale à la somme des forces appliquées ;
- l'énergie totale se conserve : c'est le premier
principe de la thermodynamique.
Nous ferons un rappel de ces principes pour des systèmes
fluides. Il existe une multitude de formulations possible du mème
principe :
- formulation sur un volume de contrôle (formulation dite
globale ou intégrale) ou bien pour un volume infinitésimal
(équation dite local);
- formulation sur des volumes de contrôle ouverts ou
fermés. Cette multitude s'avère fort pratique car cela permet une
meilleure compréhension physique et une résolution plus simple
des problèmes.
Conservation de la masse
On applique le théorème de transport (8.4)
à la fonction scalaire : f =
ñ.
On déduit :
d t ap(x, t)
jvñdV = iv ?t dV +
I ñu.ídS,
d
avec V un volume matériel et la la surface
enveloppant ce volume. En
utilisant le théorème de la divergence
(Théorème de Green), on tire :
Z d
dtV v t ñdV = Ia
(?ñ(x,
t)
+ div(ñu))dV,
De plus, si ñ est continue, alors on a
l'équation de conservation local de la masse (ou équation de
continuité) :
?ñ(x, t)
+ div(ñu) = 0. (8.6)
?t
Conservation de la quantité de
mouvement
On applique a nouveau le théorème de transport
(8.4) à la fonction vectorielle représentant la quantité
de mouvement local : f = ñu.
d t v
jvñudV = I
?ñatudV + I
ñu(u.í)dS.
d
En utilisant le théorème de la divergence, on
obtient :
d t
jv I pudV =
(?ñatu +
div(ñu.u))dV,
d
et en utilisant l'equation de continuite on obtient :
dt
ipudV = I p(?u +
div(uu))dV. v v ?t
Le principe
fondamental de la dynamique montre que toute variaton de
quantite de mouvement resulte de l'application de forces. Donc,
on peut ecrire une relation generale de la forme :
d
dt jV ñudV = mg
|{z}
poids
is ódS
force de surface
= I ñgdS + I E.ndS.
- ó = E.n designe la contrainte,
- et E le tenseur des contraintes qui se decompose en tenseur
des pressions -pId et tenseur des extra-contraintes T :
E = -pId + T, avec Id tenseur
identite.
Le tenseur T depend de la nature du fluide etudie ou du niveau
d'approximation :
- T= 0 correspond au cas des fluides parfaits (ou non
visqueux),
- T= 2uD correspond au cas des fluides newtoniens,
- T= g-(D) correspond au cas des
fluides non newtoniens, avec g- la loi du comportement du fluide.
Et une application de Theorème de Green-Ostrogradski,
permet d'aboutir à la formulation locale des equations de la quantite de
mouvement :
?ñu
?t
+ div(ñu.u) =
ñg - Vp + div(T), (8.7)
ou bien :
?u
ñ ?t + ñuvu =
ñg - Vp + div(T).
Conservation de l'énergie
Pour l'energie, rappelons que le premier principe de la
thermodynamique enonce que l'energie totale E varie au cours du temps,
à cause du travail des forces exterieures et du flux de chaleur :
äE
ät =
äQ ät .
äW + ät
avec :
- SE = (k + pe) : la variation
d'énergie totale, c'est-à-dire l'intégrale sur le volume
de contrôle de l'énergie cinétique k et de
l'énergie interne pe ( e étant l'énergie
interne massique );
- Sw : le travail des forces extérieures au sein
du volume de contrôle,
- SQ = jQ = -KV'T : la
quantité de chaleur à travers la surface de contrôle
S , et K la conductibilité thermique T la
température,
- St : incrément de temps En faisant tendre
St vers 0 , on obtient :
. (8.9)
dt fv(k +
pe)dV = I pg.udV + f
o-.udS - f jQ.vdS
s | {z 0.
· | {z }
Qÿ
Wÿ
La puissance des forces extérieures comprend des termes
positifs (puissances fournie au volume de contrôle) et négatifs
(puissance dissipée au sein du volume ou aux frontières) :
Z
+
S
pg.udV
ZWÿ =
| {z }
V
puissances fournies au volume V
o-.udS
| {z }
puissances dissipées aux frontières et dans V
Par définition de la contrainte via le tenseur des
contraintes E , on a o- = E.v = (-pId
+ T).v = -pn + T.v,
ce qui permet d'écrire
ZV pg.udV + I u.(-pn +
T.v)dS,
pg.udV + I (-pu +
T.u).vdS,.
Wÿ =
Et la formulation du premier principe de la thermodynamique est
donc le suivant :
dt iv(k +
pe)dV = I pg.udV + I (-pu +
T.u - jQ).vdS,
L'application du théorème de Stokes fournit
immédiatement
dt iV(k +
pe)dV = I pg.udV + I div(-pu
+ T.u - jQ)dV,
Et on , obtient finalement l'équation locale de
conservation de l'énergie totale :
|
d(k + pe)
dt
|
= pg.u + div(-pu +
T.u - jQ). (8.10)
|
BIBLIOGRAPHIE
[1] L. KELVIN (SIR THOMSON), On the waves produced by a
single input in water of any depth, or in a dispersive medium, Proc.
Roy.Soc. Lond. A 42 (1887), pp. 80-85.
[2] M. LIVSHITS AND V. MAZ'YA, Solvability of the
two-dimensional Neumann-Kelvin's problem for a submerged circular
cylinder, Appl.Anal.64(1997), pp.1-5.
[3] J.J. STOKER, Water Waves, Pure and Applied
mathematics, Vol.IV, inter Science publishers, Inc., New York, 1957
[4] Y. DOUTRELEAU, Résonances pour le
problème de Neumann-Kelvin tridimensionnel dans le cas d'un corps
immergé, 5th Journ de l'Hydrodynamique, Rouen, Mars,1995.
[5] X. CHEN, On the singular and highly oscillatory
properties of the Green function for ship motions, J. Fluid Mechs.
445(2001), pp.77-91.
[6] E.F CAMPANA AND A. IAFRATI, Direct numerical
simulation of surface tension dominated and non-dominated breaking waves,
24th Symposium on Naval Hydrodynamics, Fukuoka, Japan, July 2002.
[7] D.S. MOAK, The q-analogue of the Laguerre
polynomials, J. Math. Anal. Appl. 81(1981), pp.20-47.
[8] PH. DESTUYNDER AND C. FABRE, A modelling of
springing, whipping and slamming for ships, Commun. Pure Appl. Anal.
8(1)(2008), pp. 209- 228.
[9] PH. DESTUYNDER AND C. FABRE, A discussion on
Neumann-Kelvin's model for progressive water waves, Applicable Analysis,
First published on : 30 March 2011.
[10] PH. DESTUYNDER , Vibrations des structures et des
systèmes couplés, Hermès Sciense, Lavoisier, 2007.
[11] PH. DESTUYNDER , Introduction à
l'Aéroélasticité et à l'Aéroacoustique,
Hermès Sciense, Lavoisier, 2007.
[12] PH. DESTUYNDER , Introduction au calcul des
Structures, Cours cycle C , Calcul scientifique, IAT/CNAM, 1990.
[13] TH. GAZZOLA, A. KOROBKIN, S. MALENICA, AND Y.M. SCOLAN,
Three-dimensional Wagner problem using variational inequalities,
Proceedings of the 20th International Workshop on Water Waves and Floating
Bodies, Longyearbyen, Norway, pp. 77-81, 2005.
[14] W. ArTilEs AND A. NAcHbiN, Asymptotic nonlinear wave
modeling through the Dirichlet to Neumann operateur, Methods Appl. Anal.
11(3)(2004), p.001018.
[15] D. LANNEs, Well posedness of the water waves
equations, J.Amer.Math.Soc. 13(3)(2005),pp.605-654.
[16] W. CrAig AND C. SulEM, Numerical simulation of gravity
waves, J. Comput. Phys. 108(1) (1993), pp. 73-83.
[17] R. CoifMAN AND Y. MEyEr, Nonlinear Harmonic Analytic
and Analytic Dependence, Pseudodifferential Operators and Applications,
AMS, Providence, RI, 1985.
[18] J. NEcAs, Les Méthodes Directes en
Théorie des Equations Elliptiques, Masson, Paris, 1967.
[19] P. GrisvArD, Singularities in Boundary Value
Problems, Masson, Paris, 1992.
[20] M. Borsuk AND V. KoNDrATiEv, Elliptic Boundary Value
Problems of Second Order in Priecewise Smooth Domains, North Holland,
Mathematical Library, Amsterdam, 2006.
[21] R. ADAMs, Sobolev Spaces, Academic Press, New
York, 1975.
[22] J.L. LioNs AND E. MAgENEs, Problèmes aux Limites
Non-homogènes et Applications, Tome 1, Dunod, Paris, 1968.
[23] G. DuvAuT, Mécanique des Milieux Continus,
Dunod, Paris, 1990.
[24] L. LANDAu AND E. lifcHiTz, Mécanique des
fluides, J. Eng. Math. 58(2007), pp. 121-139.
[25] P.A. RAviArT AND J.M. THoMAs, Introduction à
l'Analyse Numérique des Equations aux Dérivées
Partielles, Masson, Paris, 1983.
[26] X. CHEN, Role of the surface tension in modelling
ship waves, in Proceedings of the 17th International Workshop on Water Waves
and Floating Bodies, R.C. Rayney and S.F. Lee, eds.,Peterhouse, Cambridge,
UK, 14-17 April 2002, pp. 25-28.
[27] J.L. LioNs, Quelques Méthodes de
Résolution des Problèmes aux limites Non-linéaires,
Dunod, Paris, 1969.
[28] K. KircHgAssNEr, Nonlinear resonant surface waves and
homoclinic bifurcation, Adv.Appl. Math. 26(1988), p.135181.
[29] BATHE K.J., Finite element procedures in engineering
analysis, Prentice-Hall, New-York, 1982.
[30] Bourlè H., Systèmes
linéaires, Hermès, Lavoisier,2006.
[31] Brézis H., Analyse fonctionnelle, Masson,
Paris, 1983.
[32] CiArlET P. G., The finite element method for elliptic
problems, Elsevier, Amsterdam, 1978.
[33] CiARlET P. G., Analyse numérique matricielle et
optimisation, Dunod, Paris, 1982.
[34] DuNfoRT N., SchwARz J. T., Linear operators Part II :
Spectral theory, John Wiley, Londres, 1988.
[35] SchwARz L., Analyse fonctionnelle, Hermann Paris,
1969.
[36] SchwARz L., Méthodes mathématiques pour
les sciences physiques, Hermann Paris, 1965.
[37] B. ENgquisT AND MAjDA., Absorbing boundary conditions
for the numerical simulation of waves, Maths. Comp,31(139) : 629-651,
1977.
[38] RoBERT L. HigDoN, Absorbing boundary conditions for
difference approximations to the muldimensional wave equation,Math. Comp
47(176) : 437- 459, 1986.
Ce document a été préparé aide de
l'éditeur de texte Gedit et du logiciel de
composition typographique
LATEX 2å.
Titre Conditions aux limites transparentes et
modélisation des vagues de surface dans un écoulement.
Résumé Dans ce travail, nous
présentons une formulation de condition aux limites transparentes
permettant de réaliser la simulation hydrodynamique de sillage de bateau
en milieu infini.
L'intérêt est de permettre une
modélisation linéaire transitoire du comportement de la surface
de l'eau, tout en évitant les phénomènes de
réflections d'ondes qui apparaissent habituellement lorsqu'on utilise
une modélisation classique, sur un ouvert de calcul borné. Par
ailleurs, la méthode des équations intégrales qui est
utilisée dans la plupart des codes industriels, ne permet pas de traiter
ces aspects transitoire de façon satisfaisante et nécessitent des
hypothèses simplificatrices incompatibles avec une représentation
des phénomènes physiques en présences.
Les difficultés sont multiples : d'une part, le
modèle linéaire est naturellement instable et seule la
présence de termes non-linéaires à la surface de l'eau
permet éventuellement de les stabiliser. D'autre part, il apparait trois
types d'ondes couplés (ondes de gravité, ondes acoustique, et
ondes de capillarité), ce qui rend la méthode intégrale
très délicate. En outre, la grande disparité des vitesses
d'ondes et de celle du bateau conduit à des difficultés
numériques, qui nécessite l'utilisation d'un schéma
d'intégration en temps adapté ne dissimulant pas l'un des
mécanismes en présence.
Mots-clés Conditions limites
transparentes, ondes de capillarité, vagues progressives, instabilite
surface, interaction fluide-fluide, schéma numérique.
Title Transparent boundary conditions and
wave modeling surface in a flow.
Abstract In this paper, we present a
formulation of transparent boundary condition for achieving the hydrodynamic
simulation of wake boat in an infinite medium. The interest is to allow a
linear modeling of transient behavior of the surface of the water, while
avoiding the phenomena of wave reflections that usually appear when using a
classical model, on an open bounded computation. Moreover, the method of
integral equations is used in most industrial codes, does not address them
satisfactorily transient and require simplifying assumptions inconsistent with
a representation of physical phenomena involved. The challenges are multiple:
first, the linear model is naturally unstable and only the presence of
nonlinear terms on the surface of water can eventually stabilize. On the other
hand, it appears three types of coupled waves (gravity waves, acoustic waves
and capillary waves), which makes the integral method very difficult. In
addition, the wide disparity of wave speeds and that the ship led to numerical
difficulties, which requires the use of a time integration scheme suitable not
concealing one of the mechanisms presence.
| 

