|
EPIGRAPHE
~~~~~~~~~
<<Le plus important pour un homme de
science n'est pas ses diplômes, ni le nombre de ses
années d'étude, ni même son expérience
; mais
tout simplement son intuition. >>
ALBERT EINSTEIN
DEDICACE

DcEDICJ4QE
~ 9I1ES 41Y: M. ~~) YEFO S41 WOEL
tme SI~~DFE ~~~i~E

~ ~~~~~~~~~~~~~
~~~~~~~~~~~
Le présent rapport a été
réalisé grâce à la concentration d'un certain nombre
d'effort matériel, financier, moral et surtout intellectuel. Il m'est
embarrassant de remercier à leur juste valeur tous ceux qui de
près ou de loin, ont contribué d'une manière ou d'une
autre, à l'aboutissement de ce travail. Tout le plaisir est pour moi
d'adresser mes sincères remerciements à :
+ Dieu tout puissant qui m'a soutenu tout au long de mon travail
en m'accordant la santé, l'intelligence et un esprit de
persévérance.
+ Pr FOGUE Médard, directeur de l'IUT FOTSO Victor de
Bandjoun.
+ M. POLIDORI Directeur Général du groupe CICAM
pour m'avoir accordé deux mois de stage dans son entreprise.
+ Dr KENNE Godpromesse, Chef du département Génie
Electrique.
+ A tous les enseignants de l'IUT FOTSO Victor de Bandjoun en
particulier les
enseignants du département du Génie Electrique
pour la formation qu'ils m'ont
dispensée.
+ A mon encadreur professionnel M. ETOBOK Vinny pour sa
disponibilité, son sens du travail et ses conseils.
+ A tout le personnel de la CICAM.
+ A ma mère Mme SIKADIE Régine qui m'a toujours
appris que la réussite de demain dépend des sacrifices
d'aujourd'hui et que l'on doit toujours être patient.
+ M. et Mme MPOMBO Pour leur soutient moral et
matériel.
+ M. et Mme SOKOUDJOU pour leur soutien matériel et
financier.
+ A ma grande mère Maman MANDJOU Véronique pour la
sagesse dont elle n'a jamais cessé de m'enseigner.
+ Mme MAKAMTE Pauline pour ses multiples conseils.
+ M et Mme FOTSING pour leur soutien moral.
+ M. et Mme NJUMSSA pour leur soutien financier.
+ M. et Mme FOUAPON pour leur soutien financier.
+ M. TAGOUMDJA André pour tout le soutien matériel,
moral et financier qu'il a toujours eu à me donner.
+ Mme DASSI Yvonne.
+ A mes frères et soeurs TAKAM DEFO serge, MAJEU DEFO
Félicité, KAMGANG SIMBE Stève.
+ A mes amis (es) NYA, KWAKEP NGIOFACK, NZOCHA, PENAYE, TABEU,
KAMDOUM, KAMNE, KUATE, NTIJANI, VOUFFO, DEUTOU, DJAHA, TALESTA, TALISTA,
SEUNTIO, FOMBIN en particulier ceux de la filière Génie
Electrique.
so~~~~
~~~~~~~
EPIGRAPHE i
DEDICACE ii
REMERCIEMENTS iii
SOMMAIRE v
AVANT-PROPOS viii
LISTE DES FIGURES ix
INTRODUCTION GENERALE 1
PARTIE I PRESENTATION DU GROUPE CICAM
2
Chapitre 1 : PRESENTATION DU GROUPE CICAM
3
I-1 HISTORIQUE ET CREATION 3
I-2 ACTIVITES 3
I-3 SITUATION GEOGRAPHIQUE 4
I-4 FICHE D'IDENTIFICATION 6
I-5 ORGANISATION DU GROUPE CICAM 6
I 5-1 Organigrammes de la direction de l'usine CICAM1 8
I-6 PRESENTATION DU SERVICE ENTRETIEN 9
I-6-1 Service Electricité, Electronique, Entretien Curatif
9
Chapitre 2 : DEROULEMENT DU STAGE 10
II-1 DEBUT DU STAGE 10
II-2 TRAVAUX EFFECTUES EN ENTREPRISE 10
II-2-1 Journal de bord 10
II-3 PROCESSUS DE FABRICATION DES DIFFERENTS PRODUITS. 11
PARTIE II ETUDE DU REMPLACEMENT DU DISPOSITIF
D'INTRODUCTION KRS
DE LA MACHINE A RAMER 3 14
Chapitre 1 : ETUDE DE LA MACHINE A RAMER 3
15
I-1 INTRODUCTION 15
I-2 DESCRIPTION GENERALE DE LA RAME 15
I-2-1 Les extracteurs 15
I-2-2 Les ventilateurs. 15
I-2-3 Les foulards 16
I-2-4 Les tambours 16
I-2-5 Les bacholes 16
I-2-6 Les introducteurs 16
I 2-7 Dispositifs d'introduction. 16
I-3 CARACTERISTIQUES DE LA RAME 16
Chapitre 2 : ETUDE DU SYSTEME EXISTANT
17
II-1 INTRODUCTION 17
II-2 COMPOSITION D'INTRODUCTEURS KR 3 17
II-3 PRINCIPE DE FONCTIONNEMENT 17
II-4 LIMITE DU SYSTEME 18
Chapitre 3 : ETUDE DU DISPOSITIF D'INTRODUCTION
19
III-1 INTRODUCTION 19
III-2 DIFFERENTS MODELES D'INTRODUCTION KRS 19
III-3 DESCRIPTION GENERALE 20
III-3-1 Les capteurs FR 55 20
III-3-1-1 Rôles 20
III-3-1-2 Fonctionnement 20
III-3-1-3 Caractéristiques techniques 21
III-3-2 L'actionneur KRS 51 22
III-3-2-1 Rôles 22
III-3-2-2 Fonctionnement et constitution 22
III-3-2-3 Caractéristiques techniques 23
III-3-3 Limiteur d'angle ATL 0103 24
III-3-4 Interrupteurs de fin de course NT 8004 24
III-3-5 Module de commande NT 5303. 25
III-3-6 Module de commande NT 5112 26
III-3-7 Transformateur 26
III-3-8 Régulateur numérique DC 55 26
III-3-9 Dispositif de déploiement des lisières LA 8
27
III-3-10 Contrôleur de lisières FM 0501 27
III-3-11 CONCLUSION 27
PARTIE III CONCEPTION DE NOTRE SCHEMA
29
Chapitre 1 : REMPLACEMENT DU DISPOSITIF D'INTRODUCTION
DE LA
MACHINE A RAMER 3 30
I-1 PRINCIPE ET FONCTIONNEMENT 30
I-2 CABLAGE DES DIFFERENTS BLOCS 31
I-2-1 Capteur FR 55 31
I-2-2 Interrupteur de sécurité gauche, unité
de service NT 5112 unité de service gauche NT
5303 31
I-2-3 Interrupteur de sécurité droite, unité
de service NT 5303 32
I-2-4 Remarques 33
PARTIE IV REMARQUES ET SUGGESTIONS
34
Chapitre 1 : REMARQUES ET SUGGESTIONS
35
CONCLUSION GENERALE 36
BIBIOGRAPHIE 37
ANNEXES 38

~~~~
~~~~~~
~~~~~~
ci~ocos
AVANT- PROPOS
Vu le développement technique, les avantages qu'offre
ce dernier et voulant lutter contre le sous développement, le Cameroun
dispose de plusieurs Instituts Universitaires de Technologie qui forment des
techniciens supérieurs. Dans cette optique, l'IUT FOTSO Victor offre des
formations en DUT dans les spécialités suivantes :
v' ELECTROTECHNIQUE
v' ELECTRONIQUE
v' INFORMATIQUE DE GESTION
v' GENIE CIVIL
v' MAINTENANCE INDUSTRIELLE ET PRODUCTIQUE
v' GENIE DES TELECOMMUNICATIONS ET RESEAUX
En BTS dans les spécialités suivantes :
v' ELECTROTECHNIQUE
v' ELECTRONIQUE
v' GENIE CIVIL
v' ACTION COMMERCIALE
v' COMPTABILITE ET GESTION DES ENTREPRISES v' SECRETARIAT DE
DIRECTION
En plus de ces deux formations, l'IUT FOTSO Victor Bandjoun
dispose aussi une formation en LICENCE TECHNOLOGIE repartie en trois :
v' LICENCE GENIE ELECTRIQUE
v' LICENCE INFORMATIQUE DE GESTION
v' LICENCE INFORMATIQUE DE RESEAU
Elle dispose également d'une formation CISCO
Pour le cas d'un DUT (diplôme universitaire de
technologie) option Génie Electrique c'est une formation qui a pour
objectif de donner la culture et les outils nécessaires à la
prise des responsabilités dans le domaine technologique et permettre
aussi de continuer avec des études pour ceux qui le veulent.

LISiE 11XES FIg?JJES
Figure 1 : plan géographique de l'usine CICAM
1 5
Figure 3 : palpeur FK 4003 18
Figure 2 : schémas du dispositif
d'introduction type KR 3 18
Figure 4 : Capteur FR 55 21
Figure 5 : L'actionneur KRS 51 23
Figure 6 : Limiteur d'angle ATL 0103
24
Figure 7 : Interrupteur de fin de course NT 8004
25
Figure 8 : Module de commande NT 5303
25
Figure 9 : Module de commande NT 5112
26
Figure 10 : Régulateur numérique DC 55.
27
Figure 11 : Déployeur de lisière LA 8.
27
Figure 12 : Synoptique du montage.
30
Figure 13 : Schéma de câblage des
capteurs gauche et droite. 31
Figure 14 : Schéma de câblage des
interrupteurs de fin de course gauche et module de commande NT 5303, NT 5112
32
Figure 15 : Schéma de câblage des interrupteurs de fin de
course droite et module de
commande 5303 33
Figure 16 : vue de coté de la machine à
Ramer 3 39
Figure 17 : Différentes parties du dispositif
d'introduction KRS 51 40
Figure 18 : Editeur de paramétrage
41
Figure 19 : Connexions effectuées
42
Figure 20 : Schéma d'implantation
43

~~~~~~~~~~~~ ~~~~~~~~
~~~~~ ~~~~~~
INTRODUCTION GENERALE
Le monde d'aujourd'hui rime selon la mouvance des nouvelles
technologies.
Cette nouvelle tendance technologique fait ses preuves et
s'impose pratiquement dans tous les secteurs d'activités. Pour un gain
de temps, pour des travaux précis, les entreprises s'intéressent
de plus en plus aux systèmes dont la gestion est automatique.
Pour confirmer l'adhésion à cet élan de
pensée, les stages académiques dans les entreprises ou autres
structures, confiés aux étudiants de niveau 2 du cycle DUT sont
destinés à créer un compromis entre les anciens
systèmes et les nouvelles technologies, autrement dit de se familiariser
avec le monde de la recherche et de l'emploi ;ainsi nous avons fait notre stage
à la CICAM sous le thème de « REMPLACEMENT DU
DISPOSITIF D'INTRODUCTION KRS DE LA MACHINE A RAMER 3 » .Il
était question pour nous d'étudier et remplacer par un module
électronique permettant de gérer de façon automatique et
manuelle le dispositif d'introduction de la machine à Ramer 3 , dont son
fonctionnement d'origine était mécanique ;
Pour mener à bien notre travail, nous avons tout
d'abord effectué une étude sur le mécanisme et le
fonctionnement de la machine à Ramer 3 ensuite du régulateur
numérique DC55, des actionneurs KR 47/51/52.Et enfin du remplacement du
dispositif d'introduction.
PRESENTATION DU GROUPE CICAM
PARTIE I
Chapitre 1 : PRESENTATION DU GROUPE CICAM h SO GO
CCA
I-1 HISTORIQUE ET CREATION
CICAM (cotonnière industrielle du Cameroun) S.A au
capital de 1567770000 FCFA fut crée le 14 juillet 1965 suite à un
partenariat entre 03 pays à savoir : le Cameroun à travers la
SNI, la France, et enfin l'Allemagne.
Pendant 20 ans, de 1965-1985, la CICAM a évolué
vers un environnement porteur, précisément de 1975-1985, exercice
au terme duquel son chiffre d'affaire a atteint l'équivalent de
465000000FF pour une production de filés dans ses usines de Garoua, de
près de 6500 tonnes. La phase de développement de la CICAM
s'achève, alors que la société célèbre son
20è anniversaire, par une année record où les ventes
atteignent près de 50 millions de mètres de tissu à partir
de la fin de 1985, une série d'évènements négatifs
est venue casser brutalement cette dynamique ; ce qui a entraîné
la société à une période de récession
caractérisée par la baisse des activités et par
conséquent, une baisse du chiffre d'affaire. Ce revirement du cycle
s'est achevé en 1992.
L'année 1993 marque la reprise des activités.
L'exercice 93-94 marque l'inversion de la tendance avec un chiffre d'affaires
en progression de 74%.
Depuis ces années jusqu'à nos jours, la
société CICAM a connu une stabilité de ses
activités.
I-2 ACTIVITES
Le lancement fut effectif le 04 Mai 1966 avec comme siège
social Bassa- Douala et exerçant les activités suivantes :
- L'Activité Industrielle : repartie
en trois sites à savoir : le premier à Garoua où deux
usines de filature et tissage transforment en tissu écru le coton
acheté à la SODECOTON ; une partie de ces tissus est
destinée à la grande exportation vers l'Europe et l'autre est
envoyée à Douala pour la suite du traitement. Le deuxième
site à Douala appelé CICAM I situé
à Ndokoti reçoit les tissus écrus de Garoua pour les
transformer en tissus teints
ou imprimés. Enfin, le troisième site
également à Douala connu sur le nom de SOLICAM
(Société des Lingeries du Cameroun) ou CICAM II, situé
à la zone industrielle produit des tissus éponges à partir
des fils de coton produit par l'usine de Garoua.
- L'activité commerciale :
exercée par l'intermédiaire de sa filiale Newco plus connue sous
sa marque LAKING TEXTILES implantée sur tout le territoire national par
un réseau de boutique qui pratique la vente en gros et en détail.
Elle a une gamme très variée de produits textiles qu'elle offre
aux consommateurs à savoir :
+ Les couches bébé ;
+ Les draps ;
+ Les serviettes ;
+ Les tissus pagnes ;
·
· Les tissus scolaires ;
+ Les tissus synthétiques et autres.
I-3 SITUATION GEOGRAPHIQUE
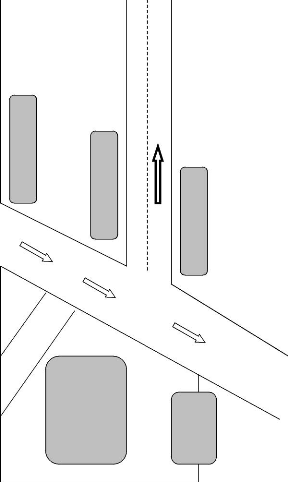
L'usine CICAM Douala-Bassa est située sur
la route menant à P K 8 face à l'usine Brasserie de Ndokoti.
La CICAM abrite des entrepôts et bureaux avec une
cité pour logement des cadres.
Vers le Carrefour BP Cite
Vers IPD
Vers Ange Raphael
TRADEX

Palais de Justice
SOCATUR

Tunnel
NDOKOTI

Carrefour
NDOKOTI

Total
Vers
NDOGBONG
CICAM

ENTREE CICAM
Vers la Gare de NDOKOTI
SOCAVER
Vers PK 8
Figure 1 : plan géographique de l'usine
CICAM 1
I-4 FICHE D'IDENTIFICATION
|
Raison sociale
|
CICAM (Cotonnière industrielle du Cameroun)
|
|
Création
|
14 Juillet 1965
|
|
Mise en route
|
04 Mai 1966
|
|
Siège social
|
BP 7012 Douala - Bassa
Tél : (237)340 62 15 - 340 75 36 Fax : (237)340 74 31
Télex : CICAM 5253 KN
|
|
Forme Juridique
|
Société Anonyme
|
|
Capital Social
|
1.567.770.000 FCFA
|
|
Objet Social
|
Filature, tissage, blanchissement, teinture, impression sur
tissu
|
|
Effectif
|
1400 personnes
|
I-5 ORGANISATION DU GROUPE CICAM
Partant de la diversité et de la pluralité de
ses activités, le groupe CICAM bénéficie d'une double
structuration qui lui permet d'avoir une politique efficace de gestion, du
suivi du personnel et des activités de l'entreprise. Elle est ainsi
constituée d'un staff général et des directions d'usine
:
-STAFF GENERAL : c'est l'organe principal du groupe CICAM
Elle est constituée de dix directions à la
tête desquelles on trouve des directeurs. Comme directeur nous avons le
:
-Directeur Général ;
-Directeur Général délégué ;
-Directeur administratif de NEWCO ; -Directeur des usines de Garoua ;
-Directeur des usines de Douala ; -Directeur des ressources humaines ;
-Directeur administratif et financier ; -Directeur de l'audit
interne ;
-Directeur technique et qualité ; -Directeur
commercial.
*Direction des usines dont celle de CICAM II Douala est
constituée du :
-Directeur des usines ;
-Chef de fabrication usine ;
-Chef service pliage et MPD ;
-Chef département entretien et travaux neufs.
I- 5-1 Organigrammes de la direction de l'usine CICAM 1

Directeur de l'usine Douala 1
JP.
TOURNEUR

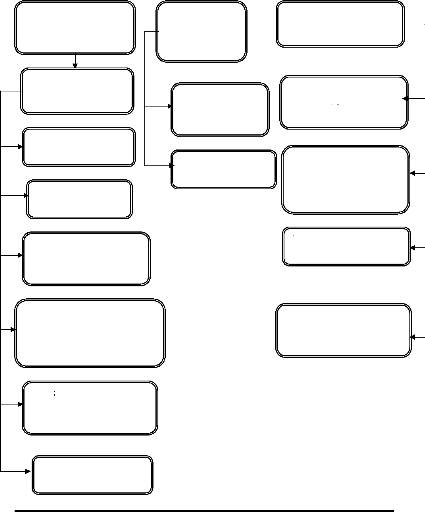
Chef Département Entretien C1
E. FOUTSO
ADJI
Ingénieur de production
H. ADJABE
Contremaitres Pliage
J. YAPMI
MAHENDE
Chef Magasinier (MPD)
A. NYAMSI
Chef service Mécanique
B. OKALI
Superviseurs Gravure
P. EKOUME
F.
MOUMBAGNA
Magasin DC
TCHAPLEU
Chef de fabrication usine
Douala1
JM.
MBATCHOU
Chef Service Pliage
et MPD
P. HAGBE
Contremaitre Apprêt
D. NDEMA
Contremaitre teinture et préparation
ONDOBO
R.
DEFO F.
KWEDI KINGUE
Chef service ElectricitéElectronique et
Entretien curatif
ANGOULA
Chef service Energies et Effluents
P.
MBESSE
Contremaitre Impression et
cuisine
L.
KOUNG
Responsable Entretien préventif
V.
SOUPGUI
Contremaitre principal
JD. MEVOA

I-6 PRESENTATION DU SERVICE ENTRETIEN
Le service entretien est sous la dépendance
hiérarchique de la direction des usines et, dispose un chef
département entretien. Pour accomplir ses missions, le service entretien
est divisé en plusieurs sections parmi lesquelles :
- La section mécanique ;
- La section Electricité/Electronique/Entretient Curatif
;
- La section soudage ;
- La section menuiserie ;
- la section peinture ;
- la section plomberie.
Et dans chaque section se trouve un chef section.
I-6-1 Service Electricité, Electronique, et
Entretien Curatif
C'est dans ce service que nous avons été
accueillis par le chef de la section
électricité/électronique/entretien curatif qui nous a
donné les directives telles que la ponctualité, l'heure de
sortie, la protection du matériel de service etc...
Chapitre 2 : DEROULEMENT DU STAGE apitre 2
DEROULEMENT DU STAGE
II-1 DEBUT DU STAGE
Nos premiers jours en entreprise étaient centrés
sur la visite générale de tous les services de l'usine ; visite
pendant laquelle nous devions nous renseigner et obtenir des informations sur
toutes les machines, leurs différents rôles, leurs fonctions.
Pendant cette période d'une semaine, nous nous sommes
familiarisés avec les employés, les matériaux et
l'environnement du travail.
II-2 TRAVAUX EFFECTUES EN ENTREPRISE
Dans les différentes sections, deux types de travaux sont
effectués. Il s'agit des travaux programmés et des travaux
réguliers.
Les travaux programmés naissent de la planification des
interventions sur le matériel de production tandis que les travaux
réguliers sont des travaux imprévus par des sections (panne).
Chaque section exécute les travaux qui relèvent de son domaine de
compétence, les différents travaux sont analysés par le
chef de section ou le chef d'atelier et mis sous forme de bon de travaux. Au
bout de quelques jours, notre capacité d'adaptation et de
compréhension nous a permis de nous insérer dans une
équipe.
II-2-1 Journal de bord
|
DATE
|
TRAVAUX EFFECTUES
|
|
27 /07/2009
|
Nous avons participé à la fabrication des tiroirs
et des caisses à outils
|
|
28/07/2009
|
dans la section menuiserie ; il était question pour nous
de couper et poncer le bois aux dimensions voulues afin de les assembler.
|
|
Nous avons participé à la réhabilitation
de l'énergie électrique dans la
cité des cadres. Il
était question de remplacer le contacteur auxiliaire de
l'inverseur
de source. Généralement, dans la cité où logent les
cadres
|
|
29/07/2009
|
de l'usine CICAM sont mises à leur disposition deux
sources d'alimentations dont la principale est issue d'une ligne AES-SONEL et
une secondaire issue d'une autre ligne AES-SONEL ou d'un groupe
électrogène.
|
|
06/07/2009
|
Nous avons effectué l'installation d'un Split. Il est
constitué d'un évaporateur et d'un groupe de condensation. Il
s'agissait de fixer le support de l'évaporateur tout en perçant
le trou de liaison entre l'extérieur et l'intérieur ; brancher
les câbles d'alimentation (phase neutre retour à la carte)
à l'extérieur rebranché de la même manière
sur le groupe de condensation ; Passé le câble, le tuyau pour
l'évacuation d'eau et deux autres tuyaux en cuivres dans le trou de
liaison avec l'extérieur ; Fixer le groupe de condensation et brancher
les deux tuyaux en cuivre qui sont de diamètre différent ; Purger
le circuit et programmer l'évaporateur.
|
|
07/08/2009
|
Nous avons participé à la révision
mécanique de la machine à Ramer 4,
le principal
problème était de changer les paliers rainurés annulaires,
de
|
|
25/08/2009
|
nettoyer les roues de chaîne, les chaînes à
plusieurs maillons, vérifier les pignons coniques, les goupilles de
serrage et les rails de la rame.
|
|
Nous avons effectué le remplacement du dispositif
d'introduction KR 3
|
|
26/08/2009
|
Par le dispositif d'introduction KRS 51, le système KR 3
(ses
|
|
26/09/2009
|
défaillances) et réciproquement pour le
système KRS (ses atouts) afin de les remplacer.
|
II-3 PROCESSUS DE FABRICATION DES DIFFERENTS
PRODUITS.
Rame II
Stockage MPF
Ouvreuse
Presses
Emballage
LIGNE EPONGE
Essoreuse
Colisage
Jet / thies / ecosft
Table
Decoupage
Plieuse
Pliage
Mag. ecru
Mixage ecru

Calandre
Rame III
Sechoir tambour

Calandrage
Appretage
Sechage imprime

Fixation
Goller
LIGNE IMPRIMES PAGNES
Mag. ecru Mag. ecru
Benn/foulard Laveuse III Rame V Rotative

Sechage
Ouvraison
Essorage
Preparation et
teinture
Laveuse I
Lavage imprime

Impression
Naphtoge / Sechage
Lavage ecru
Caustification a
chaud ou a froid
Mixage
Stockage ecru
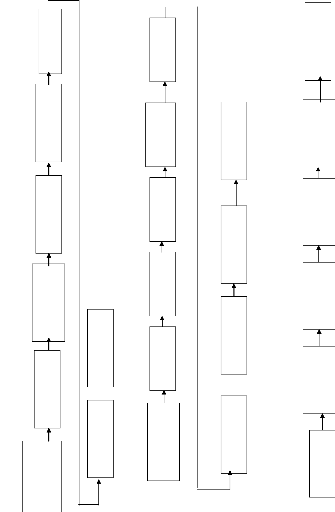
Rame II
Laveuse III
Foulard
Rame II
Appretage
Lavage et
teinture
Presses LIGNE DRILL- CHEVRON
Caustification
Sechage
Blanchiment
Mixage et enroulage
ecru
Jiggers
Mag. ecru
MPF
Stockage
Emballage
Colissage
PHOTOGRAVURE
Presses
Dosage
Doseuse
Stockage MPF
Emballage
LIGNE DRAPS
Mag. ecru Jiggers
Rame II Doseuse Plastifieuse
Colisage
Plastification
Dosage
Appretage
Preparation teinture
Mixage et
enroulage ecru
Echantillonnage
Collage embout
Copie
Equerrage
Photo -- addition
Calquage
PARTIE I
PARTIE I
ETUDE DU REMPLACEMENT DU DISPOSITIF
ETUDE DU REMPLACEMENT DU DISPOSITI
D'INTRODUCTION KRS DE LA MACHINE A
D'INTRODUCTION KRS DE LA MACHINE A
RAMER 3
RAMER
ETUDE DU REMPLACEMENT DU DISPOSITIF D'INTRODUCTION KRS DE LA
MACHINE A RAMER 3

Chaptre 1 : ETUDE DE LA MACHNE A RAMER 3 Chapitre 1 :
ETUDE DE LA MACHINE A RAMER 3
I-1 INTRODUCTION
La Rame est un appareil industriel utilisé dans le
secteur du finissage textile, elle permet l'apprêt et le séchage
du textile. Il existe plusieurs constructeurs de Rame parmi lesquels les
constructeurs ARTOS, BABCOCK (6000 machine à Ramer a retour de chaine
Horizontale qui travaillent sous la marque BABCOCK dans plus de 90 pays)
I-2 DESCRIPTION GENERALE DE LA RAME
La Rame est une gigantesque machine destinée
principalement au séchage du textile. L'architecture de la Rame est
constituée d'une grande armoire subdivisée en cinq compartiments
:
- des extracteurs ;
- des ventilateurs ;
- des foulards ;
- des tambours ;
- des bacholes ;
- des introducteurs ;
- dispositif d'introduction.
I-2-1 Les extracteurs
Ils sont au nombre de trois et sont placés au dessus de
la Rame. Ce sont des ventilateurs constitués des moteurs
triphasés et tournants dans le sens des aiguilles d'une montre afin
d'extraire l'excès de chaleur à l'intérieur des armoires
de la Rame pour les envoyer à l'air libre à travers les
cheminées.
I-2-2 Les ventilateurs.
Ils sont au nombre de dix dont cinq de chaque coté, ils
permettent d'étaler la vapeur sur toute la surface du tissu (vapeur
provenant de la chaudière) et sont généralement des
moteurs triphasés.
I-2-3 Les foulards
Ils ont pour rôle d'essorer le tissu à la sortie
de chaque bac et permettre à l'aide des moteurs à courant continu
l'entraînement du tissu. Pendant le fonctionnement de la machine, une
action sur le distributeur de chaque foulard permet d'actionner le vérin
qui aussitôt rapproche les rouleaux. Pressant ainsi le tissu afin de
réduire la quantité d'eau reçue pendant le passage dans
les bacs.
I-2-4 Les tambours
Chaque foulard est constitué d'au moins de onze tambours
ayant pour rôle d'assurer une légère transmission tournant
entre eux dans des sens contraires.
I-2-5 Les bacholes
Ce sont des grosses cuves contenant de l'eau tiède. La
régulation du niveau d'eau se fait avec un automate programmable qui
utilise l'énergie pneumatique pour jouer sur le mécanisme
d'ouverture et de fermeture des vannes. Le Plus souvent, on trouve deux
bacholes dont une bachole pour un foulard et l'autre pour un autre foulard.
I-2-6 Les introducteurs
On en dénombre deux dont un à gauche et l'autre
à droite. Ils ont pour rôle de tenir, tendre et redresser le
textile à leur passage sur les tambours.
I 2-7 Dispositifs d'introduction.
Ils sont deux bras, généralement constitués
des carottes, détecteur de lisière, d'un pignon ayant pour
rôle de se déplacer horizontalement selon les instructions
reçues.
I-3 CARACTERISTIQUES DE LA RAME
La Rame est équipée de trois moteurs à
courant continu dont un principal (Moteur de Ramage) et deux moteurs
auxiliaires placés au niveau des foulards. Lorsque l'on met le moteur
principal placé à la sortie de la Rame en marche, ce dernier tire
le support par le biais des pinces placés sur les chaines. L'annexe 1
montre la vue de coté de la machine à Ramer 3.

Chapitre 2 ETUDE DU SYSTEME EXSTANT Chapitre 2 :
ETUDE DU SYSTEME EXISTANT
II-1 INTRODUCTION
Les rameuses et machine à égaliser de haut
rendement exigent une introduction impeccable de la marchandise, à
l'aide d'appareils introducteurs KR 3 de fabrication(ERHARDT+LEIMER)
qu'utilisait la machine a Ramer 3.Elle avait été installé
pour des exigences moindre, mais aujourd'hui compte tenue de
l'amélioration des systèmes et la demande de production
élevée, ils sont très sollicités.
II-2 COMPOSITION D'INTRODUCTEURS KR 3
L'introducteur KR 3 est composé des différents
éléments suivants :
· Le palpeur de lisière FK 4003 ;
· Le moteur triphasé KLD 547 de Georgu, de puissance
125w, vitesse de rotation 920tr /min ;
· Deux courroies de commande ;
· D'une chaîne comportant 105 maillons ;
· Deux tambours magnétiques, comportant plusieurs
bobines d'électro-aimant ;
· D'une console de montage KR 3 ;
· D'un dispositif tendeur de courroie complet ;
· D'un engrenage à roues carniques complet ;
· D'un interrupteur contrôleur de fin de course ATL/B
;
· D'un interrupteur de sécurité EA 4 ;
· D'une garniture de pignon ;
· D'une vis sans fin.
II-3 PRINCIPE DE FONCTIONNEMENT
Lorsque le palpeur détecte la lisière, on
relève une transmission électrique qui est faite avec le moteur
triphasé à bride ; provoquant un champ magnétique à
travers le tambour magnétique, suivant la position d'avancement de la
lisière vers l'extérieur des bras de la
Rame. Le champ magnétique se trouvant plus consistant,
entraîne la poulie à tourner dans un sens bien précis(le
moteur à bride étant en permanence en rotation).La poulie dans
son sens de rotation, entraîne la vis sans fin, qui propulse les bras de
la Rame vers l'extérieur. Si la lisière du textile se dirige vers
l'intérieur des bras de la rame, le champ magnétique se trouvant
plus consistant entraîne la poulie à tourner dans un autre sens
bien précis, qui entraîne la vis sans fin et propulse les bras de
la rame vers l'intérieur. Nous rappellerons que, lors du montage des
palpeurs FK 40, il faut veiller à ce qu'il soit installé d'une
façon parfaitement horizontale. De plus, le levier du palpeur doit
pouvoir accomplir librement toute sa course dans chaque position, que le
dispositif de réglage peut lui imposer. La zone de réglage sera
limitée mécaniquement.
II-4 LIMITE DU SYSTEME
Le système actuel présente les limites suivantes
:
· Difficultés de trouver les courroies sur le
marché ;
· Bobine toujours déséquilibrée ;
· Ressorts sur les balais toujours faibles ;
· Aucune précision dans le déploiement des
ouvres lisières ;
Les figures ci-dessous représentent l'ensemble du
dispositif d'introduction KR 3.
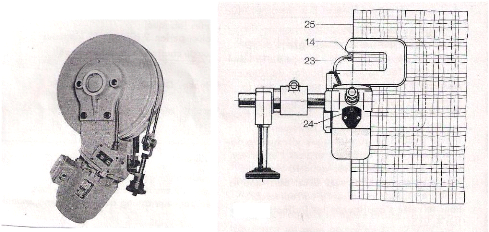
Figure 3 : palpeur FK 4003 Figure 2 :
schémas du dispositif d'introduction type KR 3
Chaptre
Chapitre 3 : ETUDE DU DSPOSTF D'INTRODUCTION
3 : ETUDE DU DISPOSITIF D'INTRODUCTION
III-1 INTRODUCTION
L'appareil introducteur KRS 51 à commande
électronique développé pour des exigences de moindres de
forces et de vitesse, s'illustre de façon excellente et fait ses preuves
sur les différentes marques de rameuses telles qu'ARTOS, BABCOCK.
III-2 DIFFERENTS MODELES D'INTRODUCTION KRS
L'introduction pour rame de type KRS existe en quatre
modèles différents suivant la vitesse d'avance de la bande et la
puissance. Le mouvement est transmis par une tige filetée
trapézoïdale sur les introductions pour rame dotée d'un
actionneur KR 47 et par une crémaillère sur les introductions
équipées d'un actionneur KR 51, KR 52, KR 56.
> l'introduction pour Rame KRS 47 est constituée de
:
deux capteurs FR 55 ;
deux actionneurs KR 47 ;
deux couples d'interrupteurs de fin de course NT 80-04 sur
glissière ;
deux limiteurs d'angle ATL 0103 ;
d'un régulateur numérique DC 55 avec un
transformateur ;
des modules de commande NT 5112 (1x) et NT 5303 (2x).
> l'introduction pour Rames KRS 52 (anciennement KRS 51) est
constituée de :
deux capteurs FR 55 ;
deux actionneurs KR 52 (anciennement KRS 51) ;
deux crémaillères ;
deux couples d'interrupteurs de fin de course NT 80-04 sur
glissière ;
deux limiteurs d'angle ATL 0103 ;
d'un régulateur numérique DC 55 avec un
transformateur ;
des modules de commande NT 5112 (1x) et NT 5303 (2x).
> l'introduction pour Rame KRS 56 est constituée de
:
deux capteurs FR 55 ;
deux actionneurs KR 56 (anciennement KRS 51) ;
- deux crémaillères ;
- deux couples d'interrupteurs de fin de course NT 80-04 sur
glissière ; - deux limiteurs d'angle ATL 0103 ;
- deux régulateurs numériques DC 55 avec un
transformateur ; - des modules de commande NT 5112 (1x) et NT 5303 (2x).
III-3 DESCRIPTION GENERALE
Elément indispensable d'une machine à rameuse
ayant pour rôle principal d'amener les bras de la rame à la
position réelle de la bande, afin de saisir impeccablement la
lisière par les picots ou par les pinces. Il est composé d'une
paire d'actionneur KRS 51, d'une ou deux interrupteurs de fin course NT 8004,
de deux limiteurs d'angle ATL 0103, de deux modules de commande NT 5303, d'un
module de commande NT 5112, d'un régulateur numérique DC 55, d'un
transformateur multi gamme, d'un contrôleur de lisières FM 0501 et
d'un déployeur de lisière LA 8.
III-3-1 Les capteurs FR 55
III-3-1-1 Rôles
Le capteur de bord infrarouge FR 55 fait partie du
système numérique DC. Il détecte le bord des bandes
textiles sans contact ou bien de manière mécanique, pour que la
bande soit guidée correctement et de façon constante. Sitôt
que la valeur réelle de la position du bras de la rame s'écarte
de la consigne de position (correspondant au centre du capteur), le capteur
concerné transmet au régulateur numérique l'amplitude et
le sens de ce déport.
III-3-1-2 Fonctionnement
Le capteur de bord infrarouge travaille selon le principe de
la réflexion, l'émetteur et le récepteur se trouvent dans
le même boîtier, la bande sert de réflecteur. Les deux
émetteurs lumineux sont composés chacun de cinq diodes
électroluminescentes émettant de la lumière. Si une bande
se trouve dans le champ visuel du capteur de bord, la lumière est
réfléchie et projetée à travers un objectif sur une
pastille CCD (charge coupled device ou dispositif a transfert de charge en
français) les éléments CCD ainsi éclairés
reçoivent un signal plus élevé.
Le microprocesseur situé dans le régulateur
numérique transforme le niveau de signal en une valeur de sortie
proportionnelle à la position du bord de la matière. Avec cette
valeur, l'introduction de la rame peut être contrôlée par
l'intermédiaire d'un bus CAN (convertisseur analogique
numérique).Simultanément, la position réelle du bord de la
matière est représentée sur la barrière lumineuse
des diodes électroluminescentes située sur le capteur de bord.
La pastille CCD est fondamentalement constituée d'une
surface photo sensible plane, que l'on positionne au foyer d'un imageur
optique. La figure 4 nous montre le capteur FR 55 et ses différentes
parties, nous rappellerons que le capteur est équipé d'un levier
mécanique pour la détection des matières à mauvaise
réflexion et pour un fonctionnement au cas où l'infrarouge est
défectueux.
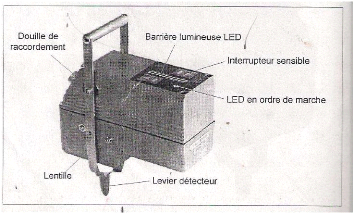
Figure 4 : Capteur FR 55
III-3-1-3 Caractéristiques techniques
|
Caractéristiques techniques
|
Marque (ERHARDT + LEIMER)
|
|
Tension d'alimentation (plage autorisée)
|
20 à 30v
|
|
Consommation de courant
|
100ma (à24v)
|
|
Puissance absorbée
|
2,4w (à24v)
|
|
Fréquence de détection
|
100hz
|
|
Plage de mesure
|
+/-10mm
|
|
Température ambiante admissible
|
10°c a +65°c
|
|
Température de stockage
|
°0 a +85°c
|
|
Longueur de câble
|
25m maximum
|
|
Protection
|
IP 65 maximum
|
|
Poids
|
0.8kg
|
III-3-2 L'actionneur KRS 51 III-3-2-1
Rôles
Après l'analyse de la donnée faite par le
régulateur numérique, il délivre à l'actionneur un
signal de correction correspondant. L'actionneur corrige alors la position du
bras de rame assurant ainsi la parfaite saisie de la matière.
III-3-2-2 Fonctionnement et constitution
L'actionneur KRS 51 sert à positionner les bras de la
rame à l'emplacement actuel d'une bande, de manière à
pouvoir saisir correctement ses bords à l'aide de chaînes à
picots ou à pinces. Il se déplace le long d'une
crémaillère sur le bras d'une rame en fonction des signaux
d'actionnement émis par le régulateur DC 55. Selon le sens et la
vitesse de rotation, le codeur incrémentiel retransmet des impulsions au
régulateur qui calcule ; en plus du signal du capteur de bords et le
nouveau signal d'actionnement. L'actionneur est mis hors circuit dès
que le bras de la rame accoste l'interrupteur de fin de course
de glissière. Il est constituécomme nous pouvons le
voir sur la figure cinq des différents éléments suivants
:
· Un moteur réducteur à courant continu avec
bras support, pignon de sortie et codeur incrémentiel muni d'une sonde
de température ;
· Un embrayage de crémaillère avec galets
supports ;
· Une colonne bride avec anneau de serrage et soufflet de
protection anti poussière (sur les modèles KR 5230 / KR 5630)
;
· Une crémaillère avec ses supports ;
· Deux fins de course de glissières NT 80-40.
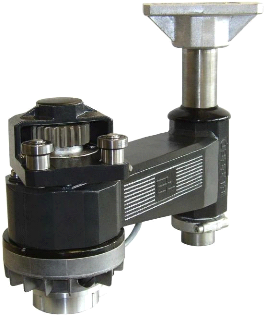
Figure 5 : L'actionneur KRS
51
III-3-2-3 Caractéristiques techniques
Caractéristiques techniques
|
Marque (ERHARDT+LEIMER)
|
Vitesse d'asservissement
|
186mm /s
|
Force de réglage
|
1200N
|
Température ambiante
|
+10°c à 65°C
|
Protection
|
IP 54
|
Moteur réducteur
|
|
Tension de calcul
|
38V
|
Couple de calcul
|
1.0 Nm
|
Température ambiante
|
+20°c
|
Courant permanent
|
8A max
|
Transmetteur de vitesse et sonde de température
|
|
Tension de service
|
20 à 30v CC
|
|
Résistance de sortie
|
500
|
~
|
Déphasage sortie A-B
|
90°
|
|
|
|
|
|
III-3-3 Limiteur d'angle ATL 0103
Les articulations des bras ont des courses angulaires
à limitation mécanique dont le passage causerait des
dégâts considérables. Afin d'éviter ce risque,
l'appareil de connexion ATL0103 est recommandé. Il aura pour principale
fonction :
· La déconnexion des réducteurs de
déplacement en cas de dépassement de l'angle de l'articulation du
bras ;
· L'ajustage automatique du bras d'entrée en cas
de dépassement de l'angle par actionnement du réglage motorique
ou manuel de la largeur, le dispositif automatique étant hors circuit
;
Déconnexion du réglage de la largeur par moteur
en cas de dépassement de l'angle du bras d'entrée, l'installation
complète étant hors circuit. Ils sont généralement
munis de deux poussoirs de commutation avec trois positions pour chacun.
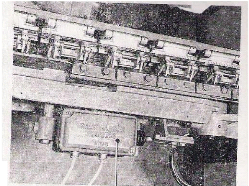
Figure 6 : Limiteur d'angle ATL
0103
III-3-4 Interrupteurs de fin de course NT 8004
La course de réglage des bras de rame est
limitée électriquement par deux interrupteurs de fin de course NT
8004, car les bras de la rame ne doivent en aucun cas se déplacer hors
de la crémaillère ou de la glissière. Ils doivent
être montés ainsi que leurs
organes de manoeuvre de manière à ce que, le
déplacement de bras de RAME soit interrompu avant qu'ils n'atteignent
les butées mécaniques (butoirs en caoutchouc). Le calcul doit
prendre en compte le retard des bras, il est donc recommandé de placer
le point de coupure à environ 40mm avant le point d'arrêt
proprement dit du bras de rame.
Figure 7 : Interrupteur de fin de course NT
8004 III-3-5 Module de commande NT 5303.
Il permet de placer les bras de rame vers la droite ou vers la
gauche en mode manuel comme en mode automatique. L'affichage automatique
s'illumine à l'état enclenché du service automatique. Si
l'affichage clignote, un avertissement se présente.

Figure 8 : Module de commande NT
5303
III-3-6 Module de commande NT 5112
Son principal rôle est de piloter l'introduction pour
rames. Il permet d'opter pour un mode de fonctionnement automatique ou
manuel.
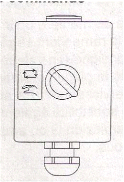
Figure 9 : Module de commande NT
5112
III-3-7 Transformateur
Pour le régulateur DC 55, il est unique et sert
d'alimentation pour les différents modules de l'introducteur. Il est
caractérisé par :
- une tension d'alimentation de 110 à 600V AC ;
- puissance nominale de 680VA ;
- tension nominale de 34V AC ;
- courant de sortie de 20 A AC.
III-3-8 Régulateur numérique DC 55
Il réalise toutes les opérations de calcul
à partir d'un programme contenu dans sa mémoire. Il est
connecté aux autres éléments du dispositif d'introduction
par des liaisons parallèles appelées BUS, qui véhiculent
les informations sous forme binaire. Sa mémoire aura pour rôle de
recevoir les informations générées par le processeur et
destinées à la commande. Le rôle principal du
régulateur numérique est de veiller à ce que, les bras de
la rame suivent précisément et en permanence la bande de
matière quelles que soint ses variations latérales de
position.

Figure 10 : Régulateur
numérique DC 55.
III-3-9 Dispositif de déploiement des
lisières LA 8
Le système élargisseur est nécessaire
pour dérouler les lisières roulottées de textiles,
chaîne - et trame. Il est connecté sur un moteur à courant
alternatif pour l'entraînement des deux vis élargisseuses
pivotantes.

Figure 11 : Déployeur de lisière
LA 8.
On peut également utiliser des déployeurs de
lisières pneumatiques LP 03.
III-3-10 Contrôleur de lisières FM 0501
C'est le dispositif de sécurité
mécanique, qui détecte la lisière du textile grâce
à une tige située à son centre. Il arrête le
fonctionnement du dispositif d'introduction quand il ne détecte pas la
lisière.
III-3-11 CONCLUSION
Ce chapitre nous a montré comment l'étude du
dispositif d'introduction KRS est
complexe ; en ce sens qu'il faut étudier et
mémoriser chaque élément qu'il comporte et pouvoir
maîtrisée son paramétrage.
CONCEPTION DE NOTRE SCHEMA
PARTIE III
CONCEPTION DE NOTRE SCHEMA
|
ptre 1 : REMPLACEMENT DU
DISPOSTIF
Chapitre 1 : REMPLACEMENT DU DISPOSITIF
D'INTRODUCTION DE LA MACHINE A RAMER 3 TRODUCTION DE LA MACHINE A RAMER
3
|
Nous présenterons dans ce chapitre les différents
câblages effectués, suivi d'une étude approfondie et
détaillée de ces derniers.
I-1 PRINCIPE ET FONCTIONNEMENT
Le schéma conçu ici, nous permet d'observer les
séquences de fonctionnement du dispositif d'introduction. Le
régulateur numérique reçoit des informations venant du
capteur infrarouge. Il les interprète, les traite et envoi les signaux
de commande.
Capteur FR 55
Actionneur KR 51
2 interrupteurs de fin de course NT 80-04
Limiteurs d'angle ATL 0103
Module de commande NT 5303
Transformateur
Régulateur numérique
DC 55
Platine électrique SE 406
Capteur FR 55
Actionneur KR 51
2 interrupteurs de fin
de course NT 80-04
Limiteurs d'angle
ATL 0103
Module de
commande NT 5303
Module de
commande NT 5112
Figure 12 : Synoptique du
montage.
I-2 CABLAGE DES DIFFERENTS BLOCS I-2-1 Capteur
FR 55
Il est recommandé de monter le capteur de bord de
façon à ce que, la bande se dirige vers le capteur avec un angle
de 90°. La longueur du câble du capteur doit s'élever de 25m
au maximum (avec la platine de commande).
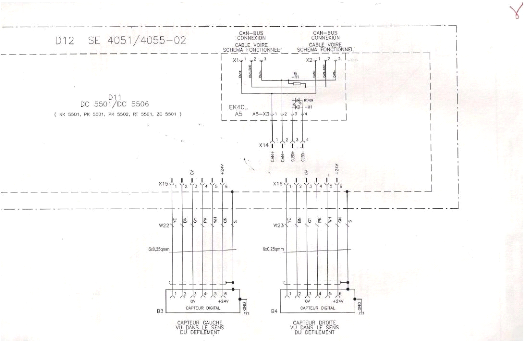
Figure 13 : Schéma de câblage des
capteurs gauche et droite.
I-2-2 Interrupteur de sécurité gauche,
unité de service NT 5112, unité de service gauche NT 5303
Les unités de service NT 5112 et NT 5303 devront
être montées côte à côte et au dessus des bras
gauche, de la rame afin d'être piloté facilement par
l'utilisateur.
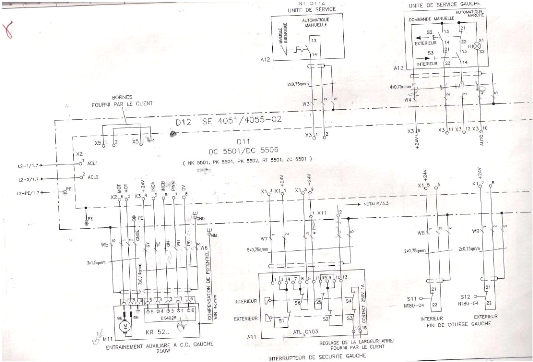
Figure 14 : Schéma de câblage des
interrupteurs de fin de course gauche et module de commande NT 5303, NT
5112
Quant au couple de sécurité gauche, il devrait
être mis de telle sorte que pendant le fonctionnement du dispositif
d'introduction, les barres transversales de l'actionneur puissent buter sur les
interrupteurs côté gauche dans son mouvement.
I-2-3 Interrupteur de sécurité droite,
unité de service NT 5303
L'unité de service NT 5303 sera montée au dessus
du bras droit de la rame afin d'être piloté facilement par
l'utilisateur. Pour le couple d'interrupteur de sécurité droit,
il devrait être mis de telle sorte que pendant le fonctionnement du
dispositif d'introduction, les barres transversales de l'actionneur puissent
buter sur les interrupteurs droits dans son mouvement.
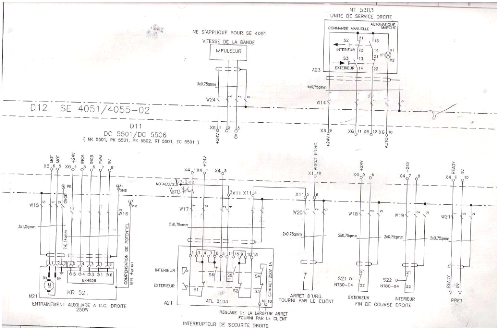
Figure 15 : Schéma de câblage des
interrupteurs de fin de course droite et module de commande
5303
I-2-4 Remarques
Les capteurs FR 55 et actionneurs seront reliés au
régulateur par des câbles d'une section de 2,5mm2 et
d'une longueur de 25m.
Quant aux interrupteurs de fin course, aux limiteurs d'angle, aux
modules de commande NT. Ils seront reliés aux régulateurs par des
câbles d'une section comprise entre [1,5 -2,5] mm2.

PARTIE IV
TIE 4
REMARQUES ET SUGGESTIONS REMARQUES ET
SUGGESTIONS
|
Chapitre 1 : REMARQUES ET SUGGESTIONS Ch ARQ
SGGO
|
La fin d'une formation en DUT est marquée par un stage
académique effectuée dans une entreprise ou structure, dans le
but de mettre en pratique les connaissances reçues au cours de notre
formation et la présentation d'un rapport.
Passé deux mois à la cotonnière
industrielle du Cameroun où nous avons effectué notre stage sur
le thème « Remplacement du dispositif d'introduction KRS de
la machine à Ramer ».Il n'a pas été
évident pour nous de le faire , Car un thème comme le notre
requiert tout d'abord la compréhension du fonctionnement de la machine
à Ramer, puis du dispositif d'introduction des machines à Ramer
.Le problème qui se posait était l'insuffisance de la
documentation sur l'ancien système du dispositif d'introduction et
l'absence de poste d'ordinateur pour les stagiaires.
Nous suggérons à la Direction
Générale de la CICAM l'installation d'un groupe
électrogène dans le bloc de la gravure, car pendant une photo
gravure sur un cylindre ; s'il y a interruption de l'énergie
électrique le cylindre va perdre sa valeur, compte tenu de son
coût très élevé elle contribuera à
d'énormes pertes pour l'entreprise.
Pour les stagiaires, l'équipement d'une salle
d'ordinateurs avec connexion Internet pour faciliter le travail de la
recherche.
CONCLUSION GENERALE

~o~L~~O
~~~~ ~~~ ~ ~~~~~~
gc
Les stages académiques ont pour but d'aider
l'étudiant à consolider et à confronter les enseignements
reçus à l'école aux réalités pratiques
professionnelles ; ainsi les huit semaines au cours desquelles la CICAM nous a
accueillis, nous ont permis de rapprocher nos connaissances qui, jusqu'ici,
n'étaient que théoriques aux réalités pratiques
professionnelles. Et constater qu'il existe un grand fossé entre les
réalités de ce milieu et l'école ; d'où pour nous
ici l'occasion de tirer un coup de chapeau, à ceux qui ont eu
l'idée d'instaurer le stage académique en cycle DUT.
Pour mener à bien ce stage, nous avons reparti le
travail comme suit. Dans un premier temps, nous avons fait une étude de
la machine à Ramer 3 et sur le dispositif d'introduction KR3, puis nous
avons effectué son remplacement par le dispositif d'introduction KRS. Au
terme de notre analyse, nous ne pouvons que manifester le désir d'un
éventuel retour qui cette fois nous permettrait de valoriser l'effort de
formation fourni par le corps administratif et professionnel de l'iut FOTSO
Victor, tout en exprimant toutes nos connaissances pour que vive la CICAM.
Loin d'être une oeuvre parfaite, nous restons à
l'écoute de toute suggestion et critique pouvant permettre
l'amélioration de notre travail.

~~~~~~~~~~~
~~~~~~~~~~~
BIBIOGRAPHIE
[1] Archives CICAM trouvé à l'entreprise «
fonctionnement du dispositif d'introduction KR3 ».
[2] Archives CICAM trouvé à l'entreprise «
Documentation sur le fonctionnement du dispositif d'introduction KRS ».
[3] Fonctionnement des actionneurs et
capteurs.www.erhardt-leimer.com
consulté le 02 /10/2009.

J4~EXES
~~~~~
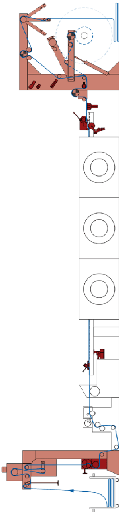
Figure 16 : vue de coté de la machine
à Ramer 3
ANNEXE 2
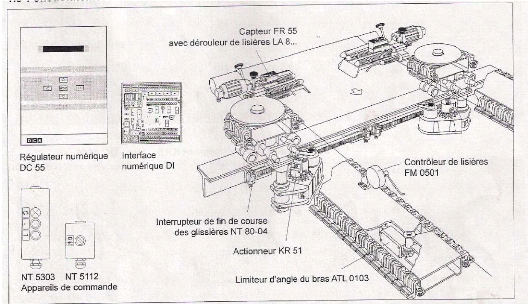
Figure 17 : Différentes parties du
dispositif d'introduction KRS 51
ANNEXE 3
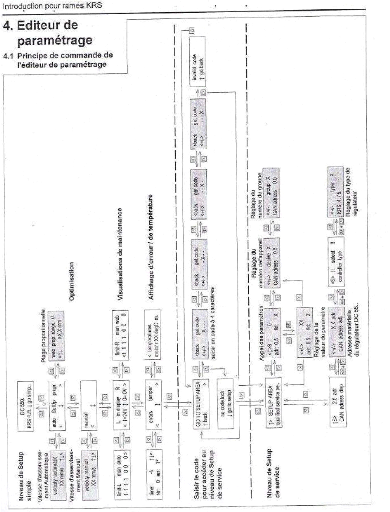
Figure 18 : Editeur de
paramétrage
ANNEXE 4
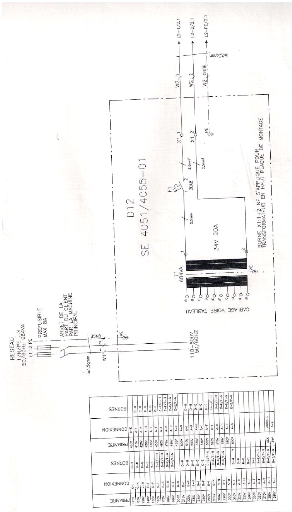
Figure 19 : Connexions
effectuées
ANNEXE 5
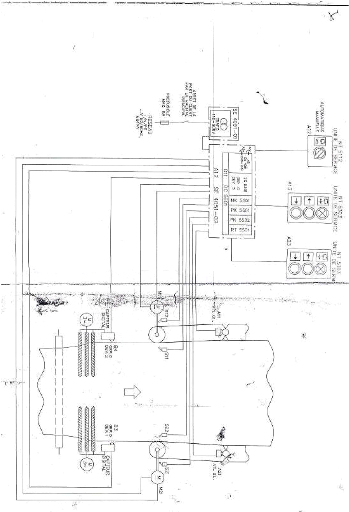
Figure 20 : Schéma
d'implantation
| 

